卡尔曼预测器在目标相关跟踪中的应用
《卡尔曼与均值漂移在动态目标跟踪中的应用研究》范文

《卡尔曼与均值漂移在动态目标跟踪中的应用研究》篇一一、引言动态目标跟踪是计算机视觉领域的重要研究方向之一,广泛应用于智能监控、无人驾驶、智能机器人等领域。
卡尔曼滤波器和均值漂移是两种常用的动态目标跟踪算法,它们在处理动态目标跟踪问题中具有各自的优势。
本文将探讨卡尔曼滤波器和均值漂移在动态目标跟踪中的应用研究,分析其原理、优势及存在的问题,并提出相应的解决方案。
二、卡尔曼滤波器在动态目标跟踪中的应用卡尔曼滤波器是一种高效的递归滤波器,它能够从一系列的不完全且包含噪声的测量中,估计动态系统的状态。
在动态目标跟踪中,卡尔曼滤波器通过预测和更新两个步骤,实现对目标的准确跟踪。
预测步骤根据目标的运动模型预测下一时刻的目标位置,更新步骤则根据实际观测值对预测结果进行修正。
卡尔曼滤波器的优势在于能够处理含有噪声的数据,并在动态环境中保持较高的跟踪精度。
然而,当目标运动状态发生突变或存在遮挡等情况时,卡尔曼滤波器的性能会受到一定影响。
针对这些问题,研究者们提出了改进的卡尔曼滤波算法,如扩展卡尔曼滤波、平方根卡尔曼滤波等,以提高在复杂环境下的跟踪性能。
三、均值漂移在动态目标跟踪中的应用均值漂移是一种基于密度的目标跟踪算法,它通过计算目标区域与周围区域的颜色直方图差异,确定目标的运动方向和速度。
在动态目标跟踪中,均值漂移通过迭代优化目标区域的位置,实现对目标的稳定跟踪。
均值漂移的优点在于对光照变化和部分遮挡具有一定的鲁棒性。
然而,当目标形状发生较大变化或背景复杂时,均值漂移的跟踪性能会受到影响。
为了解决这些问题,研究者们提出了将均值漂移与其他算法相结合的方法,如将均值漂移与卡尔曼滤波器相结合,以充分利用两者的优点。
四、卡尔曼与均值漂移的结合应用将卡尔曼滤波器和均值漂移结合应用在动态目标跟踪中,可以充分发挥两者的优势。
一方面,卡尔曼滤波器能够处理含有噪声的数据,并在动态环境中保持较高的跟踪精度;另一方面,均值漂移能够处理目标形状变化和部分遮挡等问题。
多目标跟踪中的卡尔曼滤波算法优化研究
多目标跟踪中的卡尔曼滤波算法优化研究多目标跟踪是计算机视觉和图像处理领域中的一个重要研究方向,它涉及到对多个目标在连续视频帧中的位置、速度和运动状态进行跟踪和预测。
在多目标跟踪中,卡尔曼滤波算法是一个广泛应用的基本算法,它能够通过利用目标的动态模型和测量模型来估计目标的状态,并提供目标位置的准确估计。
然而,传统的卡尔曼滤波算法在多目标跟踪中存在一些问题,如航迹混淆、轨迹交叉和目标丢失等。
因此,针对这些问题,研究者们提出了一些方法来优化卡尔曼滤波算法,在多目标跟踪任务中获得更好的性能。
首先,一种常见的方法是引入目标检测或者目标识别的技术来辅助多目标跟踪过程。
通过目标检测算法,可以在视频帧中找到目标的位置和大小信息,从而更准确地初始化和更新卡尔曼滤波器。
同时,可以使用目标识别算法来区分不同目标,减少航迹混淆和轨迹交叉的问题。
其次,多目标跟踪中的数据关联问题也是一个关键的挑战。
数据关联指的是将不同帧中的目标进行匹配,以便在跟踪过程中建立正确的目标航迹。
在卡尔曼滤波算法中,常用的数据关联方法包括匈牙利算法和贪婪算法等。
此外,一些研究者还将深度学习方法引入多目标跟踪中,通过学习目标之间的相关性来建立数据关联模型,提高跟踪准确度。
此外,为了降低卡尔曼滤波算法在目标运动模型和测量模型方面的限制,研究者们提出了一些改进方法。
例如,可以通过建立更复杂的目标运动模型,例如匀加速运动模型或者非线性运动模型,来提高卡尔曼滤波算法对快速运动或者转弯等复杂情况的适应能力。
此外,还可以通过使用非线性度量模型、自适应卡尔曼滤波算法或者扩展卡尔曼滤波算法等技术来解决非线性问题。
最后,一些研究者还将卡尔曼滤波算法与其他跟踪算法进行融合,以提高多目标跟踪的性能。
例如,可以将卡尔曼滤波和粒子滤波相结合,通过粒子滤波器的采样和重采样过程,增加卡尔曼滤波器对目标可能性的估计范围,提高跟踪的准确性和稳定性。
综上所述,多目标跟踪中的卡尔曼滤波算法优化需要考虑目标检测与识别、数据关联、运动模型和测量模型的优化,以及与其他跟踪算法的融合。
卡尔曼滤波实现目标跟踪
卡尔曼滤波实现目标跟踪卡尔曼滤波(Kalman Filtering)是一种应用于估计系统状态的数学算法,通过将历史测量值与系统模型进行融合,可以准确地预测系统的当前状态。
在目标跟踪领域,卡尔曼滤波被广泛用于在动态环境中估计目标的位置和速度。
在目标跟踪任务中,预测步骤通常根据目标物体的运动模型进行。
其中最常用的模型是线性模型,假设目标物体的运动是匀速直线运动。
在这种情况下,预测步骤可以通过简单地将当前位置和速度与时间增量相乘来计算下一个状态。
如果目标物体的运动模型是非线性的,可以使用扩展卡尔曼滤波(Extended Kalman Filtering)进行预测。
预测步骤的输出是卡尔曼滤波的预测状态和预测状态协方差矩阵。
预测状态表示目标物体在没有更新的情况下的最佳估计位置和速度。
预测状态协方差矩阵表示估计的不确定性。
更新步骤的输入是测量值和测量误差协方差矩阵。
测量值表示由传感器提供的目标位置信息,测量误差协方差矩阵表示测量值的不确定性。
在更新步骤中,首先计算卡尔曼增益。
卡尔曼增益是一个权重,用于在预测状态和测量值之间进行加权求和。
卡尔曼增益的计算根据预测状态协方差矩阵和测量误差协方差矩阵进行。
然后,使用卡尔曼增益将预测状态进行修正,得到更新状态。
更新状态表示目标物体在考虑了测量值的情况下的最佳估计位置和速度。
最后,通过计算更新状态协方差矩阵,更新步骤反映了估计的不确定性。
卡尔曼滤波在目标跟踪中的应用是非常广泛的。
它可以用于处理各种传感器的测量数据,如雷达、相机、激光扫描仪等。
卡尔曼滤波可以处理传感器测量数据中的噪声和不确定性,并生成最佳估计的目标位置和速度。
通过将卡尔曼滤波与运动模型结合使用,可以实现对目标物体的准确跟踪。
总结起来,卡尔曼滤波是一种基于数学算法的目标跟踪方法,通过融合历史测量值和系统模型,可以预测目标的状态,并修正预测结果。
卡尔曼滤波在目标跟踪任务中有广泛的应用,可以处理多种不确定性,并提供准确的目标位置和速度估计。
基于卡尔曼滤波的目标跟踪研究

基于卡尔曼滤波的目标跟踪研究摘要:随着计算机视觉和机器学习技术的发展,目标跟踪技术在许多领域中得到广泛应用。
卡尔曼滤波是一种经典的估计算法,可以用于目标跟踪,具有良好的估计性能和实时性。
本文主要介绍了卡尔曼滤波在目标跟踪领域的研究进展,包括基本原理、模型建立、算法优化等方面。
1.引言目标跟踪是计算机视觉和机器学习领域的一个重要研究方向。
在许多应用中,如视频监控、自动驾驶等,目标跟踪技术都扮演着重要的角色。
目标跟踪技术主要目的是在一段时间内通过图像或视频序列确定目标的位置、形状、尺寸等信息。
2.卡尔曼滤波的基本原理卡尔曼滤波是一种递归算法,用于估计线性系统的状态。
它基于贝叶斯滤波理论,将观测数据和系统动力学方程结合起来,通过迭代更新的方式获得对系统状态的估计。
卡尔曼滤波有两个主要的步骤:预测和更新。
预测步骤根据系统的动力学方程和上一时刻的状态估计,预测出当前时刻的状态。
更新步骤则根据观测数据和预测的状态,通过计算卡尔曼增益来更新状态估计。
3.卡尔曼滤波在目标跟踪中的应用目标跟踪问题可以看作是一个卡尔曼滤波问题,即通过观测数据预测目标的状态。
在目标跟踪中,系统动力学方程可以根据目标的运动模型来建立。
观测数据可以是目标在每一帧图像中的位置信息。
通过将这些信息输入到卡尔曼滤波器中,可以得到对目标状态的估计。
4.卡尔曼滤波在目标跟踪中的改进与优化尽管卡尔曼滤波在目标跟踪中取得了一定的成功,但还存在一些问题,如对目标运动模型的建模不准确、对观测数据的噪声假设过于理想等。
因此,研究者提出了许多改进和优化方法。
其中一种方法是引入非线性扩展的卡尔曼滤波,如扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)。
另一种方法是使用深度学习技术来提取更准确的特征表示,进一步改善目标跟踪性能。
5.实验与结果分析本节主要介绍了一些使用卡尔曼滤波进行目标跟踪的实验研究,并对其结果进行了分析。
实验结果表明,卡尔曼滤波在目标跟踪中具有较好的稳定性和精度。
deepsort 拓展卡尔曼滤波
deepsort 拓展卡尔曼滤波拓展卡尔曼滤波(Extended Kalman Filter, EKF)是一种常见的目标跟踪算法,而DeepSORT则是在EKF基础上进行的拓展,用于更加准确地实现目标跟踪。
下面将从EKF的基本原理开始,介绍DeepSORT 算法的原理以及其在目标跟踪领域的应用。
1.卡尔曼滤波(Kalman Filter)的基本原理卡尔曼滤波是一种递归滤波算法,用于估计在不完整和有噪声的测量数据下的状态变量。
简而言之,卡尔曼滤波算法通过结合先验信息和观测结果来实现对目标状态的最优估计。
卡尔曼滤波算法包括两个主要步骤:预测(Predict)和更新(Update)。
预测步骤中,根据上一时刻的状态估计和系统模型,通过状态转移方程得到当前时刻的状态预测。
预测的结果包括状态估计和状态协方差矩阵。
更新步骤中,利用预测的状态估计和观测模型,将测量结果与预测结果进行比对,得到当前时刻的最优状态估计。
更新的结果也包括状态估计和状态协方差矩阵。
通过不断迭代预测和更新步骤,卡尔曼滤波算法可以实现对目标状态的最优估计。
2. DeepSORT的原理DeepSORT是一种将深度学习与卡尔曼滤波相结合的目标跟踪算法,旨在提升目标跟踪的准确性与鲁棒性。
DeepSORT的核心思想是利用深度学习网络(如卷积神经网络)来提取目标特征,然后将这些特征作为观测值输入到卡尔曼滤波器中进行状态估计。
DeepSORT算法的主要步骤如下:(1)特征提取:利用预训练的深度学习网络,如ResNet、VGG等,对目标进行特征提取。
通过将目标图像输入到网络中,可以得到代表目标特征的向量。
(2)目标匹配:根据特征向量计算目标之间的相似度,并利用匈牙利算法或最小权重匹配算法来建立观测与目标的对应关系。
(3)卡尔曼滤波:对每个目标的运动进行预测,并将预测的结果作为观测值输入到卡尔曼滤波器中进行状态估计。
利用卡尔曼滤波器的预测步骤和更新步骤,可以得到每个目标的最优状态估计。
卡尔曼滤波应用实例-目标跟踪滤波
z x [2] x[2] x[2] ( z [2] z [1]) / T x x x[2 / 2] z y [2] y[2] ( z [2] z [1]) / T y y[2] y
x[2] z x [2] x[2] x[2] wx [2] wx [2]
滤波误差方差阵: Px [k / k ] ( I K[k ]H)Px [k / k 1]
滤波起始:采用两点起始法,
即利用前两个观测数据 z[1], z[2] 进行起始。
z x [2] ( z [2] z [1]) / T x x ˆ x[2 / 2] z y [2] ( z y [2] z y [1]) / T
2 p33 E ( w2 [2]) y
2
T
2
2 a
/ 4 2 / T
2
2
p34 E w y [2] (T / 2)a y [1] ( w y [1] w y [2]) / T / T
2
p44 E (T / 2)a y [1] ( w y [1] w y [2]) / T
2 T 22 2 a 2 4 T
0 0 2 2 T
z x [2] ( z [2] z [1]) / T x x ˆ [2 / 2] x z y [2] ( z y [2] z y [1]) / T
0 0
0 0 2 T 2 2 2 T a 2 2 4 T
x[1] T x[1] T a x [1] / 2 x[1] x[1] T a x [1] (T / 2)a x [1] T
移动目标跟踪的算法研究及其应用
移动目标跟踪的算法研究及其应用第一部分:前言随着技术的发展和智能化的进步,移动目标跟踪的应用越来越广泛。
移动目标跟踪的核心是找到目标并跟踪它,因而算法的优劣直接决定着跟踪结果的好坏。
在本文中,我们将探讨一些常见的移动目标跟踪算法,以及它们在实际应用中的情况。
第二部分:常见的移动目标跟踪算法1. 卡尔曼滤波器算法卡尔曼滤波器是一种线性滤波器,可以用来估计系统的状态。
在移动目标跟踪中,卡尔曼滤波器的应用主要是用来估计目标的轨迹和速度等状态参数。
卡尔曼滤波器算法具有简单、实用、鲁棒性强的特点,在很多应用中得到了广泛的应用。
2. 粒子滤波器算法粒子滤波器算法是一种非参数滤波器,与卡尔曼滤波器相比具有更好的适应性和精度。
在移动目标跟踪中,粒子滤波器算法用来估计目标的状态,可以有效地解决一些卡尔曼滤波器无法解决的问题,如非线性系统和非高斯噪声。
3. CAMShift算法CAMShift算法是一种基于颜色直方图的目标跟踪算法,它的核心思想是通过更新目标直方图的方式来实现目标跟踪。
CAMShift算法具有实时性好、可靠性高、鲁棒性强等特点,在很多应用场景中得到了广泛的应用。
第三部分:移动目标跟踪算法的应用1. 智能监控移动目标跟踪算法在智能监控领域有广泛的应用。
通过对监控视频中的移动目标进行跟踪,可以实现对物品的自动识别、实时监控、监控报警等功能,提高监控系统的安全性和智能化程度。
2. 交通管控移动目标跟踪算法在交通管控领域同样有着广泛的应用。
通过对交通视频中的车辆进行跟踪,可以实现对交通流量、拥堵等情况的实时统计,帮助交通部门进行交通治理,提高道路的通行效率和安全性。
3. 智能机器人移动目标跟踪算法在智能机器人领域也有很大的应用潜力。
通过对机器人视觉信息的处理,可以实现机器人的导航、目标抓取、环境识别等功能,为机器人的智能化发展打下基础。
第四部分:总结总的来说,移动目标跟踪算法是计算机视觉领域中的重要研究方向之一,也是实际应用中必不可少的一种算法。
卡尔曼滤波器在运动目标中的跟踪

运动目标的跟踪面临许多挑战, 如目标运动的不确定性、噪声干 扰、遮挡等。
卡尔曼滤波器概述
01
02
03
定义
卡尔曼滤波器是一种高效 的递归滤波器,用于从一 系列测量中估计状态变量 的值。
特点
卡尔曼滤波器具有无偏性 和最小方差性,能够提供 状态变量的最优估计。
应用
卡尔曼滤波器广泛应用于 各种领域,如控制系统、 信号处理、金融预测等。
1
卡尔曼滤波器在运动目标跟踪中具有较高的跟踪 精度和鲁棒性,能够适应不同场景和条件下的运 动目标跟踪。
2
卡尔曼滤波器在实时性方面表现较好,能够快速 响应运动目标的变化,满足实时应用的需求。
3
卡尔曼滤波器在运动目标跟踪中具有广泛的应用 前景,可以应用于视频监控、自动驾驶、机器人 视觉等领域。
05
卡尔曼滤波器在运动目标跟踪 中的改进方向
根据实际观测结果和估计结果 不断更新卡尔曼滤波器的参数 ,提高运动目标跟踪的准确性
。
04
卡尔曼滤波器在运动目标跟踪 中的性能评估
性能评估指标
跟踪精度
衡量卡尔曼滤波器对运动目标位 置估计的准确性。
鲁棒性
评估卡尔曼滤波器在不同场景和 条件下对运动目标跟踪的稳定性
。
实时性
评估卡尔曼滤波器在运动目标跟 踪过程中的计算效率。
实验结果展示与分析
实验一
在不同速度和方向变化的运动目标跟踪中,卡尔曼滤波器能够准 确估计目标位置,并具有较好的鲁棒性。
实验二
在复杂背景和噪声干扰下,卡尔曼滤波器能够保持稳定的跟踪性能 ,并具有较好的抗干扰能力。
实验三
在实时性方面,卡尔曼滤波器能够快速响应运动目标的变化,并具 有较快的计算速度。
无迹卡尔曼滤波在目标跟踪中的应用

本科毕业设计论文题目无迹卡尔曼滤波在目标跟踪中的应用专业名称学生姓名指导教师毕业时间毕业任务书一、题目无迹卡尔曼滤波在目标跟踪中的应用二、指导思想和目的要求利用已有的专业知识,培养学生解决实际工程问题的能力;锻炼学生的科研工作能力和培养学生的团结合作攻关能力;三、主要技术指标1、熟悉掌握无迹卡尔曼滤波的基本原理;2、对机动目标进行跟踪;四、进度和要求第01周----第02周:英文翻译;第03周----第04周:了解无迹卡尔曼滤波的发展趋势;第05周----第06周:学习无迹卡尔曼滤波基本原理;第07周----第09周:掌握Matlab编程,熟悉开发环境;第10周----第11周:学习常用目标的机动模型;第12周----第13周:编写程序,调试验证;第14周----第16周:撰写毕业设计论文,论文答辩;五、参考文献和书目1. 张勇刚,李宁,奔粤阳,等. 最优状态估计-卡尔曼及非线性滤波[M],国防工业出版社,2013。
2. 冯志全,孟祥旭,蔺永政,等.UKF滤波器的强跟踪性研究[J].小型微型计算机系统, 2006, 27(11): 2142-2145。
3. 潘泉,杨峰,叶亮,等.一类非线性滤波器-UKF综述[J].控制与决策, 2005, 20(5): 481-489。
4.宋迎春. 动态定位中的卡尔曼滤波研究[D]. 博士学位论文;长沙:中南大学, 2006。
5.贺觅知.基于卡尔曼滤波原理的电力系统动态状态估计算法研究[D].西安:西安交通大学,2006。
6.孙清,张陵,张爱社,伍晓红,等.基于扩展卡尔曼滤波(EKF)的结构动态物理参数识别[A];第十届全国结构工程学术会议论文集第Ⅲ卷[C];2001年。
7.黄铫.一种扩维无迹卡尔曼滤波.电子测量与仪器学报[J].2009,2009增刊:56-60。
8.柴霖,袁建平,罗建军,等。
非线性估计理论的最新进展[J].宇航学报,2005,26(3):380-384。
卡尔曼滤波 目标跟踪

卡尔曼滤波目标跟踪
卡尔曼滤波(Kalman Filter)是一种递归状态估计算法,用于
对动态系统的状态进行预测和估计。
它是由美国数学家卡尔曼于1960年提出,被广泛应用于目标跟踪、导航、机器人等领域。
目标跟踪是指通过对目标的观测信息进行处理,估计目标在未来时刻的位置、速度等状态信息,从而实现对目标的跟踪。
卡尔曼滤波在目标跟踪中有很大的应用价值,主要有以下几个方面的优势:
首先,卡尔曼滤波采用递归方式进行状态估计,可以利用当前时刻的观测信息和上一时刻的状态信息来预测下一时刻的状态,从而实现对目标运动的连续跟踪。
其次,卡尔曼滤波通过综合考虑观测信息的误差和系统动态的不确定性,有效地抑制了噪声对跟踪性能的影响。
它利用系统的动态模型和观测模型来建立状态和观测之间的关系,并通过最小均方误差准则来实现状态估计,使得估计结果更加准确。
此外,卡尔曼滤波还具有良好的实时性能和计算效率。
它的计算量较小,可以在实时系统中实时运行,适用于对目标进行实时跟踪。
对于目标跟踪问题,卡尔曼滤波的基本过程包括预测和更新两个步骤。
在预测步骤中,利用系统动态模型和上一时刻的状态信息,对当前时刻的状态进行预测;在更新步骤中,利用当前
时刻的观测信息,更新状态的估计值并计算误差协方差。
通过不断迭代,可以得到对目标状态的连续估计。
可以看出,卡尔曼滤波在目标跟踪中具有较好的性能和应用前景。
它能够实现对目标的连续跟踪,并且对观测噪声和系统动态的不确定性有较好的适应性。
目前,卡尔曼滤波已经成为目标跟踪领域的重要算法之一,并且在实际应用中取得了较好的效果。
卡尔曼预测在自动跟踪云台中的应用
mo e t rdc temo igo jc , ul s gteteKa nftr c rincp c yt si t d lop e i vn bet fl u i l l ’ r u s a ai e t th y n h h ma i e S e o t o mae
t e tr e o a in o h e ttm e h i a i lt n r s l c n r e h c u a y o h sm eh h a g tl c t ft en x i .t efn l mu ai e ut o f m d t ea c r c ft i t — o s o i o. d Ke w r s y o d :Kama i e ,ta k n ag t a —i l n fl r r c i g tr e ,p n t t t l
像 头 的最佳观 测位 置 , 由此产 生 目标跟 踪 失效 。本 文提 出卡 尔曼预 测 跟 踪 模 型 , 出卡 尔 曼滤 波 算 给 法 , 分利 用卡 尔曼滤 波 的 递 推 估 计 能 力 对 目标 位 置 进 行 预 测 , 充 最后 仿 真 结 果 证 实 了该 方 法 的 正
确性 。
关键 词 :卡 尔曼滤 波 目标 跟踪 云 台
Applc to f Ka m a iБайду номын сангаас r i he a t 。 r c ng i a i n o l n fle n t u o- a ki t
W a gJ n e g L i n n u fn e Bi
卡尔 曼预 测在 自动 跟 踪 云 台 中的 应 用
王俊 凤 雷 斌
( 西安工业 大学 电子信 息学院 西安 70 3 ) 10 2
卡尔曼滤波应用实例
卡尔曼滤波应用实例卡尔曼滤波(KalmanFiltering)是一种状态估计方法,主要应用于定位、导航、目标跟踪以及模式识别等技术中。
它可以用来估计未知系统或过程的状态,也可以将一个测量值序列转换成更准确的状态序列,以消除噪声对测量结果的影响。
卡尔曼滤波是一种概率算法,它以一种可以提供模型描述的方式来估计状态变量的未知过程。
它的主要思想是,当一次测量值被收集后,将其与历史测量值进行比较,根据观测序列和模型参数,使用最优状态估计方法来更新状态估计器的预测数据。
卡尔曼滤波的应用实例非常多,下面将介绍其在定位、导航、目标跟踪以及模式识别等领域中的典型应用实例。
1)定位:卡尔曼滤波在定位领域中最常用的是GPS定位。
GPS 是一种全球定位系统,它使用太空技术进行定位。
GPS定位系统使用微波载波技术来定位,用于计算两个位置之间的距离,然后根据计算出的距离和测量结果,使用卡尔曼滤波算法来估计当前位置。
2)导航:在航海导航领域,卡尔曼滤波算法可以应用于军用导航系统中,以便将航行状态传递给其他航行设备,以及用于精细的航行定位、航迹计算和轨迹规划等。
3)目标跟踪:卡尔曼滤波在目标跟踪领域也得到广泛应用,它可以用来跟踪目标物体,如机器人、无人机、汽车等。
例如,可以使用卡尔曼滤波算法来跟踪机器人在空间中的位置,以及汽车在高速公路上行驶的轨迹。
4)模式识别:卡尔曼滤波还可以应用于模式识别领域,可以用来识别视觉系统中的图像模式,以及用于图像处理领域中的边缘检测和轮廓提取等。
以上是卡尔曼滤波在定位、导航、目标跟踪以及模式识别等领域中的应用实例,该算法在实际工程中得到了广泛应用,但也存在一些问题和缺陷,如对模型参数的依赖性太强、不适用于动态系统以及模型中噪声太多等问题。
因此,需要持续改进卡尔曼滤波的算法,以使其能够在更复杂的场景中得到更好的应用。
总之,卡尔曼滤波是一种广泛应用于定位、导航、目标跟踪以及模式识别等领域的优秀技术,它以一种可以提供模型描述的方式来估计状态变量的未知过程,在实际应用中发挥着巨大作用,但也需要不断完善和改进,以满足更多的需求。
卡尔曼滤波目标跟踪算法
卡尔曼滤波目标跟踪算法1. 引言1.1 背景介绍在目标跟踪领域,卡尔曼滤波算法是一种广泛应用的估计方法,它通过处理传感器测量数据和系统动态模型,实现对目标状态的预测和更新。
随着目标跟踪应用的普及和需求的增加,卡尔曼滤波算法在实时目标跟踪中发挥着重要作用。
卡尔曼滤波算法最初由R.E. Kalman和R.S. Bucy在20世纪60年代提出,被广泛应用于航空航天领域。
随着计算机技术的不断发展和普及,卡尔曼滤波算法被应用到了更多领域,包括机器人导航、目标追踪、人脸识别等。
在目标跟踪中,卡尔曼滤波算法能够通过对目标状态的动态建模和传感器测量的融合,实现对目标位置、速度等信息的精准估计。
这为实时目标跟踪系统提供了重要支持,使得系统能够更好地适应复杂环境和动态场景。
本文将介绍卡尔曼滤波算法的原理、在目标跟踪中的应用,同时分析其优缺点并提出改进的方法,最后通过案例分析展示其在实际应用中的效果。
通过本文的研究,可以更深入了解卡尔曼滤波目标跟踪算法的原理和实际应用,为进一步研究和应用提供参考和借鉴。
1.2 研究意义卡尔曼滤波目标跟踪算法在目标跟踪领域具有重要的研究意义。
目标跟踪是计算机视觉和机器人领域的重要研究方向,涉及到目标识别、运动估计、位置预测等问题。
传统的目标跟踪算法往往受限于噪声、运动模型不准确等因素,难以取得准确的跟踪结果。
而卡尔曼滤波算法通过对系统的动态模型和观测模型进行建模,并根据最小均方误差准则对系统状态进行优化估计,能够有效地解决这些问题。
卡尔曼滤波目标跟踪算法在目标跟踪任务中具有较高的准确性和鲁棒性,能够适应各种复杂的场景。
卡尔曼滤波算法还能够自适应地根据实时观测数据对系统进行调整,具有较强的实时性和稳定性。
深入研究和应用卡尔曼滤波目标跟踪算法可以为目标跟踪技术的发展提供重要的理论支持和技术保障,推动相关领域的进步和发展。
研究卡尔曼滤波目标跟踪算法不仅有助于提高目标跟踪的精度和效率,还对实际应用具有重要的意义。
卡尔曼滤波算法在雷达目标定位跟踪中的应用

卡尔曼滤波算法在雷达目标定位跟踪中的应用摘要:本文阐述了雷达跟踪系统中滤波器模型的建立方法,介绍了卡尔曼滤波器的工作原理,通过仿真方法,用卡尔曼滤波方法对单目标航迹进行预测,即搜索目标并记录目标的位置数据,对观测到的位置数据进行处理,自动生成航迹,并预测下一时刻目标的位置。
基于此方法的仿真实验获得了较为满意的结果,可以应用于雷达目标跟踪定位。
关键词:卡尔曼滤波;滤波模型;定位跟踪中图分类号:TN9591.引言雷达目标跟踪是整个雷达系统中的关键环节。
跟踪的任务是通过相关和滤波来确定目标的运动路径[1]。
在雷达中,人们通常只对跟踪目标感兴趣,但对目标位置、速度和加速度的测量随时都会产生噪声。
卡尔曼滤波器利用目标的动态信息去除噪声的影响,对目标位置进行较好的估计。
其可以是当前目标位置的估计滤波器、未来位置的预测、过去位置的插值或平滑。
随着计算机硬件技术和计算能力的迅速提高,卡尔曼滤波逐渐取代其他滤波方法成为ATC自动系统跟踪滤波的标准方法[2]。
卡尔曼滤波不需要独立于跟踪滤波过程的目标机动或跟踪效果检测,而是对其作统一处理,提高了算法的归一化程度。
卡尔曼滤波还可以将高度跟踪和水平位置跟踪结合起来,以考虑高度和水平方向之间可能存在的耦合。
本文从理论推导和仿真验证两方面探讨了卡尔曼滤波在单目标航迹预测中的应用,通过仿真对实验结果进行评价:卡尔曼滤波具有最佳的目标定位和跟踪精度。
1.Kalman滤波跟踪1.Kalman滤波模型•目标运动的动力学模型目标状态转移方程如下:状态转移方程描述了如何从当前时间目标的状态变量计算下一次的状态变量。
方程中的目标运动转移矩阵,反映了目标运动规律的基本部分,模型误差,反映了目标运动规律中不能被准确表达的随机偏差,是目标运动动力学模型的数学表达式。
•测量模型一般来说,传感器(雷达)可以直接检测到的目标参数并不是描述目标动力学的最合适的状态变量。
例如,二次雷达直接测量目标的俯仰角、方位角和斜距,而描述目标动力学最合适的状态变量是三维笛卡尔坐标及其导出量。
卡尔曼滤波在目标跟踪中的研究与应用

本文主要研究对机 动 目标进行 建模 , 目标发 当
・-・ — —
作者简介 :刘静( 96一 , , 18 ) 男 助理工程师 , 研究方 向为雷达装备性 能测试 与故障诊断 。
1 4 -— 7 — . —
统及非平稳随机过程 , 是线性系统的最优估计理论。
2 1 年第 0 0 1 1期
中图分类号 :N 5 T 93 文献标识码 : A 文章编号 :0 9— 52(0 1 1 0 7 0 10 2 5 2 1 )0— 14— 4
卡 尔 曼 滤 波在 目标 跟踪 中的研 究 与应 用
刘 静, 姜 恒 ,石晓原
(2 6 7 4 5部队 , 济南 2 02 ) 5 0 2
1 目标 跟踪 的基本 内容及算法
1 1 机 动 目标跟踪 的基 本 内容 .
12 卡尔曼滤波理论 . 卡尔曼滤波理论突破 了经典维纳滤波理论和方
法 的局 限性 , 引人 了 系统 的状 态 变量 和 状 态 空 间 的
目标跟踪 基本 上 包 含 量测 数 据 形 成 与处 理 、 机
动 目标建模、 机动检测与机动辨识 、 滤波 与预测、 跟 踪坐标系的选取 、 跟踪门规则、 数据关联 、 航迹起始
与终 止 等 内容 。机 动 目标 跟踪 系统 的基本 框 图如 图
1所示 。
概念 , 出了时域上 的状态空间方法 , 提 标志着现代控 制理论的诞生。它给出了~套在计算机上容易实时 实现的递推滤波算法 , 适合处理多变量系统 、 时变系
(2 6 ro so L Jn n20 2 C ia 74 5T o p f A,ia 5 02, hn ) P
Ab t a t T e Kama l r g a g r h i e mo t u e i o tg n r d r sg a r c s i g sr c : h l n f t i lo i m s t s s n n w s e i a a in l p o e sn . i en t h a
卡尔曼滤波在雷达目标跟踪中的应用

卡尔曼滤波在雷达目标跟踪中的应用文档下载说明Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document 卡尔曼滤波在雷达目标跟踪中的应用can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!卡尔曼滤波(Kalman Filter)是一种用于估计系统状态的数学方法,它能够有效地处理由不确定性和噪声引起的问题。
在雷达目标跟踪中,卡尔曼滤波被广泛应用,因为它能够提供对目标位置和速度等状态的最优估计,同时考虑了测量误差和系统动态的不确定性。
雷达目标跟踪是指通过雷达系统对目标进行监测和跟踪,以获取目标的位置、速度和其他相关信息。
物体检测中的多目标追踪方法应用教程
物体检测中的多目标追踪方法应用教程在计算机视觉领域中,物体检测和目标追踪是两个重要的任务。
物体检测旨在识别图像或视频中的物体,并标注其边界框。
目标追踪则是在连续帧中跟踪目标的位置、大小和形状。
多目标追踪方法结合了这两个任务,旨在同步检测和追踪多个物体。
本文将介绍一些常见的多目标追踪方法及其应用。
一、基于卡尔曼滤波的多目标追踪方法卡尔曼滤波是一种基于状态空间模型的递归滤波器,已被广泛应用于目标追踪领域。
它通过将目标的位置和速度建模为状态向量,并利用观测模型预测目标的下一帧位置。
卡尔曼滤波方法通常与其他物体检测算法(如YOLO、SSD等)配合使用,以提供更准确的目标位置。
1.1 YOLO-DeepSORTYOLO(You Only Look Once)是一种快速的物体检测算法,能够在一次前向传播中同时识别多个物体。
DeepSORT结合了YOLO和卡尔曼滤波器,实现了在视频中跟踪多个目标的功能。
首先,YOLO用于检测视频帧中的目标,并提取目标的特征向量。
然后,这些特征向量通过卡尔曼滤波进行相关匹配,并根据该匹配计算目标的速度和位置。
最后,使用匈牙利算法解决多目标关联问题,即确定每个目标在连续帧中的轨迹。
1.2 SORTSORT(Simple Online and Realtime Tracking)是一种基于卡尔曼滤波的实时目标追踪算法,与YOLO等目标检测器结合使用。
SORT通过递归贝叶斯估计目标状态来预测下一帧的目标位置。
在每帧中,使用匈牙利算法将当前检测结果与已跟踪目标进行关联,并根据关联结果更新卡尔曼滤波器的状态和协方差矩阵。
SORT具有较快的执行速度和较好的目标追踪性能,在实时应用中得到广泛应用。
二、基于深度学习的多目标追踪方法随着深度学习技术的快速发展,基于深度学习的目标追踪方法也逐渐受到关注。
这些方法通过训练神经网络来学习目标的特征表示,从而实现多目标的准确追踪。
2.1 DeepSORTDeepSORT是Deep Association Metric Learning(深度关联度量学习)与SiamRPN++(一种基于深度学习的目标跟踪器)相结合的方法,能够在复杂场景下实现高准确性和高计算效率的多目标追踪。
扩展卡尔曼滤波在目标跟踪中的应用研究

摘 要 :扩展卡 尔曼滤波在非平稳矢量信 号和噪声环境 下具有广泛的应 用,针对机动 目 标运动 模型的特点 ,采用基于扩展卡尔曼滤波的算法对运动 目 标进行跟踪处理 ,该算法首先建立了运
动 目标 的状 态模 型 和观 测模 型 ,然后 对观 测 数 据进 行 滤 波和 误 差估 计 处 理 ,最后 通过 计 算 机 的 蒙特 卡洛 仿真 得到 了滤 波轨迹 和 运 动 目标 的距 离和 角度误 差 ,仿 真 结果 表 明 ,扩展 卡 尔曼滤 波
Z HANG Ai . mi n
( C o mmu n i c a t i o n T r a j I l i n g B a s e o f P L A Ge n e r a l S t a f He a d q u a r t e r s , X u a n h u a 0 7 5 1 0 0 , He b e i P r o v i n c e , C h i n a )
2 0 1 3 牟¥1 0 期
文章编号 : 1 0 0 9— 2 5 5 2 ( 2 0 1 3 ) 1 0— 0 0 9 5— 0 3 中 图分 类号 : T N 9 1 1 . 7 2 文献标识码 : A
扩展 卡 尔曼 滤 波 在 目标 跟 踪 中 的应 用研 究
张爱 民
( 总参谋部通信训练基地 , 河北 宣化 0 7 5 1 0 0 )
算 法具有目 标跟踪 ; 蒙特卡洛仿真
Re s e a r c h o n t a r g e t t r a c k i n g o f e x t e n d e d Ka l ma n il f t e r ’ a n d i t s a p p l i c a t i o n
卡尔曼滤波的初值计算方法及其应用

卡尔曼滤波的初值计算方法及其应用卡尔曼滤波的初值计算方法及其应用摘要:卡尔曼滤波是一种广泛应用于信号处理和控制系统中的估计算法。
本文将首先介绍卡尔曼滤波的基本原理,然后重点讨论了初值计算方法及其应用。
初值计算是卡尔曼滤波的一个重要环节,它的准确性对于滤波器的性能具有重要影响。
本文将从最小二乘估计和状态方程的观测值入手,详细描述了常用的初值计算方法。
最后,本文介绍了卡尔曼滤波在几个典型应用中的实际应用,包括航空导航、目标跟踪和机器人导航等领域。
关键词:卡尔曼滤波,初值计算,最小二乘估计,状态方程,实际应用一、引言卡尔曼滤波是由迈克尔·卡尔曼(Michael Kalman)于1960年提出的,是一种利用系统动态方程和传感器测量值进行状态估计的方法。
卡尔曼滤波具有计算简单、适用于线性和高斯噪声系统等优点,因此在信号处理和控制系统中得到了广泛应用。
二、卡尔曼滤波的基本原理卡尔曼滤波的基本原理是通过状态方程和观测方程来估计系统的状态。
状态方程描述了系统的动态行为,而观测方程提供了系统状态的测量值。
卡尔曼滤波通过不断迭代,通过当前观测值和先验估计值计算出后验估计值,从而实现对系统状态的估计。
三、初值计算方法初值计算是卡尔曼滤波的一个重要环节,准确的初值计算可以改善滤波器的性能。
常用的初值计算方法有最小二乘估计法和状态方程的观测值法。
1. 最小二乘估计法最小二乘估计法是一种利用已知历史观测值计算初值的方法。
该方法通过将观测方程带入状态方程,将滤波误差最小化,从而得到估计的状态初值。
在实际应用中,可以通过历史观测序列的平均值或其他统计量来估计初始状态。
2. 状态方程的观测值法状态方程的观测值法是一种利用观测值的先验信息计算初值的方法。
该方法通过将观测方程带入状态方程,从而得到系统状态的估计。
在实际应用中,可以通过历史观测值和系统动态方程,利用递推关系来计算初始状态。
四、卡尔曼滤波的应用卡尔曼滤波在许多领域中得到了广泛应用。
无迹Kalman滤波器及其目标跟踪应用

最后 计 算 U F增益 ,更新 状 态 向量和 方差 。仿真 表 明该 方法 比 E F方 法可 用 性 更 强 K K 关键 词 :卡 尔曼滤 波 ;无迹 变换 ; 无迹卡 尔 曼滤波 中图分 类号 :T 3 1 ;T 1 . P0. 6 N7 3 1 文 献标 识码 :A
Uns e t d Ka m a le nd IsAplc to o Ta g tTr c ng c n e l n Fit ra t i a i n t r e a ki
d srb t n h a n h o a i n e o h p i t r q a o t e me n a d t e c v r a c f t e o i i t t iti u i ;t e me n a d t e c v ra c f t e o n s we e e u lt h o a n h o a i n e o h rg nm
M e s r me t n n r l c n q e a u e n d Co t a o Te h i u
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S ( 3) =
^
2 [ x1 ( 3 ) - x1 ( 2 ) ] / T 2 [ x1 ( 3 ) - 2 x1 ( 3 ) + x1 ( 1 ) ] / T
2. 2 基于卡尔曼预测器的模板匹配算法
均方误差矩阵 : σ2 r
P ( 3) =
σ2 r /T
2 σ2 2 r /T
2 σ2 r /T 3 σ2 3 r /T
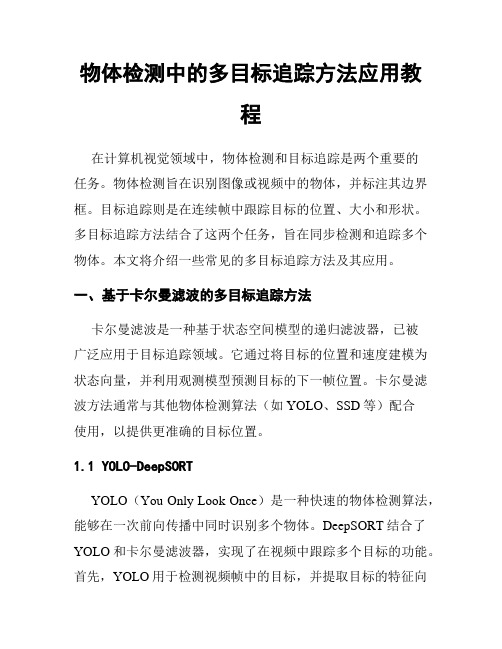
256 × 128 的图像序列共 100 帧进行目标跟踪 。其中基于卡
[2] 刘学东 , 贾玉林 , 孙昊 . 相关算法中跟踪稳定性问题的研究 [ J ]. 红外与激光工程 , 1998 - 2, 27 ( 1) . [3] 杨宜禾 , 周维真 . 成像跟踪技术导论 [M ]. 西安 : 电子科技大
学出版社 , 1992. 1 - 6.
[4] 俞卞章 . 数字信号处理 [ M ]. 西安 : 西北工业大学出版社 , 2002. 8 - 8.
尔曼预测的匹配跟踪算法跟踪的结果如图 5 所示 , ( a ) 为匹 配模板 , ( b)和 ( c) 为遮挡前的第 12 帧和第 25 帧图像 , ( d) 为遮挡时的第 27 帧图像 , ( e )为遮挡后的第 31 帧图像 ,可以 看到在第 27 帧目标遇到标志杆遮挡 , 这时本算法程序仍能 有效的跟踪 ,且在整个 100 帧图像序列中始终稳定跟踪 。而 传统算法程序在第 27 帧时 , 目标跑飞 , 在第 31 帧时才重新 跟踪上 ,且在整个 100 帧图像序列中常常受干扰而跑飞 。同 时在相同条件下 ,匹配跟踪一幅图像所需时间为 : 传统算法 要用 80m s,而本算法只需 2m s。这个实验结果已经充分说明 了本方法的优越性 。
0
Q ( n) =
协方差矩阵 ; Q ( n) 是系统噪声协方差矩阵 ; H ( n) = A K ( n) ) 上述递归方程可由图 2 直观地描述 , 可以看出它极有利 于计算机程序实现 。
0 0
0
2 0 , 其中本文设 σ2 然后 r = 1,σq = 1。
0 0
2 0 σq
就可运用上述的卡尔曼预测方程进行递归运算 , 其中修正系 数矩阵 H ( n ) 是关键 。 由预测方程可知 , 计算 H ( n ) 之前 , 必须 先求出 前 一 帧 预 测 的 均 方 误 差 矩 阵 Pn - 1 ( n) , 而 要 求 出
^ ^ ^
配点的位置 , x2 ( n) 代表第 n 帧时最佳相关匹配点的速度 ,
x3 ( n ) 代表第 n 帧时最佳相关匹配点的加速度 ;
预测修正系数 :
T -1 H ( n ) = A Pn - 1 ( n ) C + R ( n ) ]
( 2) ( 3)
状态转移矩阵和量测矩阵分别为 :
1
A = T T /2 T
σ2 r /T
2 σ2 r /T
3 4 σ2 σ2 σ2 3 r /T q +6 r /T
接着就可根据预测 方程 ( 1 ) 、( 2 ) 、( 3 ) 求 出
H ( 3) 、 S3 ( 4 )
^ ^
和
P3 ( 4 ) , 再取 S 3 ( 4 ) 的第
一个元素作为下一帧的 预测位置 , 如图 4 中所 示的 C 点 ; 取 P3 ( 4 ) 的
Ka lm an F ilter in Target Track in g
XU J ian, DUAN Zhe - m in
(Northwestern Polytechnical University, Xi’ an Shanxi 710072, China ) ABSTRACT: The correlation is an usual method in target tracking system , especially in the comp lex background. But there is a p roblem in traditional matching method that the method searches the target in the whole area, so it can ’t be realized in real tim e because of large amounts of calculation. And when the target is partial shaded, the target w ill be lost on tracking . To solve the p roblem , this paper p resents a new app roach based on the Kalm an Filter to real2 ize target tracking . And this algorithm uses the forecast function of Kalm an Filter to make target tracking more active. In experi m ent, the traditional method alw ays lose the tank when the tank is at a high speed, and the method of the paper can steadily track it . So the method of the paper can well overcome the main disadvantages of large amounts of calculation, and more steady in case when target is partial shaded. KEYW O RD S: Kalm an forecast; Target tracking; Correlation matching
图 3 基于卡尔曼预测的模板匹配算法示意图
第一个元素作为下一帧 的预测均方误差 。 它们 一起决定下一帧搜索区 域 , 如图 4 所示 , 其中搜 索起点横坐标为 X 预测
图 4 搜索区域示意图
由图 3可以看到模板只在当前帧上起点为 A 的区域中进 行相关运算 , 找到最佳相关匹配点 B , 其中这个搜索区域的 起点和长宽都是在上一帧用卡尔曼预测器预测得到的 。 为实
第 22 卷 第 11 期
文章编号 : 1006 - 9348 ( 2005) 11 - 0120 - 03
计 算 机 仿 真
2005 年 11 月
卡尔曼预测器在目标相关跟踪中的应用
徐剑 ,段哲民
(西北工业大学 ,陕西 西安 710072)
摘要 : 在目标跟踪系统中 ,特别是在复杂背景情况下对地面目标的跟踪中 ,相关跟踪算法是常用的一种算法 。但问题是传统 相关算法 [ 1 ]采用全局搜索的方法 ,使得计算量相当大 ,不易实时实现 ,而且当发生目标局部遮挡时 , 目标容易丢失 。为解决 这个问题 ,该文提出一种基于卡尔曼预测器的目标相关跟踪的方法 , 充分利用卡尔曼预测器的预测功能来预测下一帧目标 可能出现的区域 ,然后在较小的预测区域中进行相关匹配运算 ,找到最佳相关匹配点 ,从而使目标相关跟踪更具主动性 。实 验中用传统算法和本文提出的算法对高速行驶的坦克进行跟踪时 ,传统算法容易跑飞 ,而该文算法不受遮挡干扰 , 始终稳定 跟踪且耗时大幅减少 。因此该文算法能够较好地克服传统相关算法中存在的计算量大和易受遮挡干扰的缺点 。 关键词 : 卡尔曼预测 ; 目标跟踪 ; 相关匹配 中图分类号 : TP391 文献标识码 : A
假设用 X 来表示单个预测器的状态向量 , 则 :
x1 ( n) X ( n) = x2 n) x3 ( n ) , 其中 x1 ( n ) 代表第 n帧时最佳相关匹
递归矢量卡尔曼预测方程 (现时刻 n来预测 n + 1时刻的 值 ) 如下 : 预测方程 :
S n ( n + 1 ) = AS n - 1 ( n) + H ( n) [ X ( n) - CS n - 1 ( n) ] ( 1 )
Pn - 1 ( n ) 又必须先在第一帧 、 第二帧和第三帧中分别在全区
域进行相 关 匹 配 得 到 三 帧 中 的 最 佳 相 关 匹 配 点 的 位 置 :
x1 ( 1 ) 、 x1 ( 2 ) 和 x1 ( 3 ) , 并据此得到矢量估计量矩阵 : x1 ( 3 )
图 2 卡尔曼预测修正过程示意图
P4 ( 5 ) , 如此递归下去求得各帧的预测值 ……。 当目标被遮
^
挡时 , 可以保留原来预测值作为当前帧的最佳相关匹配点 , 这样就有效克服了局部遮挡的影响 。
图 6 程序流程图
由于该算法计算简单有效 , 非常便于硬件实现 , 如果再 结合由粗到精的匹配策略或别的优化算法 ,将在速度上得到 进一步提高 ,可以有效地应用在实际的巡航制导过程中 。 参考文献 :
2预测Biblioteka 方误差 :T Pn ( n + 1 ) = [A - H ( n ) C ] Pn - 1 ( n ) A + Q ( n )
0 0
1 0
C = [ 1 0 0 ],
递推 :
n →n +1 (其中 A 是状态转移矩阵 ; C 是量测矩阵 ; R 是量测噪声
1
其中 T 为帧间间隔时间 ; 量测噪声的方差为 R ( n) = σ2 r; 系统噪声的协方差矩阵 :
1 引言
用可见光或红外成像进行目标跟踪的技术是广泛应用 于军事领域的一种被动式目标检测 、 跟踪技术 。跟踪的算法 很多 ,其中相关跟踪算法具有对图像质量要求不高 、 可在低 信噪比条件下正常工作 、 能适应较复杂结构目标和背景的场 合、 具有较强的局部抗干扰能力等优点 , 因此在成像跟踪中 有着重要地位 。它的基本原理是 : 以目标特征数据为模板 , 在每帧图像中寻找匹配点 ,即以目标形态特点为判据实现目 标检索和跟踪 。但是在全局进行搜索时 , 计算量庞大 , 不便 于实时实现 ,应用成本较高 。同时在实践中也发现 , 全局抗 干扰能力不太理想 , 特别是当模板与背景某部分特征相近 时 ,跟踪容易跑飞 。针对这些问题 ,本文提出一种算法 ,利用 卡尔曼预测器的预测功能 , 来预先确定好匹配区域 , 这样搜