测量目标高度的双基地MIMO雷达虚拟阵元技术
一种双基地MIMO雷达的相关目标定位方法

发 射 阵列 接 收 阵列
配对的 E P I S R T算 法 , 免 了配 对 算 法 的 额 外 计 算 避 量 。文 献 [ 2 提 出 了 一 种 有 效 抑 制 色 噪 声 联 合 1]
DO D和 D A算 法 , 虚 拟 阵列 划 分 成 两 个 互 不 重 O 把
其中: n ( )=[ 。n , / , , ( ) 为 接 收 阵 Y ( )Y ( ) … Y n ] Z 列输 出 矢 量 ; ・ 表 示 矢 量 或 者 矩 阵 的 转 置 ; ()
间前 向空 间平滑 ( S ) 法 的相 关 目标 联 合 角度 的 FS算 估 计 , 是该 算法 损 失 了 MI 但 MO雷达 虚拟 阵列孔 径 ,
关键 词 :雷达 工程 ;MI 雷达 ;双 基地 ;相关 目标 定位 ;虚拟 阵列 MO
中 图分类 号 : N 5 T 98
文献标 志码 : A
文章 编号 :10 -0 3 2 1 ) 1 0 50 0 0 19 ( 0 2 0 - 3 -6 0
A e h d f r Co r ntM ulit r e c lz to M t o o he e t -a g t Lo a i a i n
, 高 提
子 空 间 ( S R T 算 法 在 联 合 D D 和 D A估 计 中 E P I) O O
基 金 项 目:国家 自然 科 学 资 金 (0 0 0 8 6741 ) 作 者 简 介 :王 伟 (9 9 ) 男 , 教 授 。E m i hn w 2 0 @ yho cm.n 17 一 , 副 — al ia w 0 6 ao.o c :c
测量目标高度的双基地MIMO雷达虚拟阵元技术

mu tp e i p t l l-n u mu p e o t u (M I O ) r d r i p o o e . Th me h d c r is O t att d i hi l_ u p t M aas s rp sd e t o a re U l u e i
目标 模 糊 . 关 键 词 : 多输 入 多输 出 雷达 ;双 基 地 雷达 ;高度 测 量 ;虚 拟 阵 元技 术 中 图 分 类 号 : 9 17 TN 1 文献标识码 : A 文 章 编 号 :0 12 0 ( 0 0 0 — 6 1 0 1 0—4 0 2 1) 40 7—5
smu a i n ai a e t e p o o e t o i lto sv l t h r p s d me h d. d
Ke W or s: y d m u tpl—n li e i put m uli l— tp eout ut a a p r d r; b sa i r da it tc a r; att e liud m e s e e ; vit a a ur m nt ru l ee e t e hniue l m n st c q
j N ig, LI J n LI M n l u AO is e g. LI W e— n Gu —h n ipi g
( y La .o d r S g a r c s i g,Xi i n Un v. Ke b fRa a i n lP o e s n da i ,xi n 7 0 7 ,Ch n ) ’ 101 a ia
双基地FDA-MIMO雷达角度、距离及速度无模糊估计方法

双基地FDA-MIMO雷达角度、距离及速度无模糊估计方法赵智昊;王志民;孙扬【摘要】在传统的相控阵雷达中,由于受到脉冲重复周期(PRF)的限制,距离估计精度和速度估计精度往往难以同时得到提高.该文将频控阵(FDA)和双基地多输入多输出(MIMO)雷达相结合,提出了一种基于双基地FDA-MIMO雷达的角度、距离及速度联合估计方法.文章首先利用FDA技术,使得雷达的发射矢量中包含目标的角度、距离甚至速度信息.然后提出了基于子阵的波形设计和解耦合算法以对发射矢量中距离-速度进行解耦合处理,并利用传统的子空间类算法对目标的发射角(DOD)、接收角(DOA)、距离和速度进行估计,最后文章提出了基于FDA的解模糊方法以解决距离和速度模糊问题.另外,该文推导了该方法下参数估计的克拉美罗界(CRB)并分析了其性能.仿真结果验证了所提出方法的能够对目标的角度、距离和速度进行无模糊的联合估计.%It is known that velocity estimation ambiguities can be eliminated and range estimation ambiguities may appear with high pulse repetition frequency (PRF) in traditional phased-array (PA) radar.In this paper,a joint unambiguous angle,range and velocity estimation method is proposed for bi-static Multiple-Input-Multiple-Output (MIMO) radar with frequency diverse array (FDA).First,with the FDA,the transmit steering matrix carries angle,range even velocity information.Then,a subarraybased transmitted waveform and decoupling approach are designed to solve range-angle coupling in transmit steering matrix.Utilizing the subspace decomposition algorithm,the direction-of-departure (DOD),direction-of-arrival (DOA),range and velocity parameters are estimated.Finally,the ambiguity resolve methods based on FDA are proposed to deal with theambiguities of range and velocity estimation.Additionally,Cramér-Rao bounds (CRB) for these parameters are derived and the performance of this radar is analyzed.Simulation results indicates the validity of the proposed method.【期刊名称】《四川大学学报(自然科学版)》【年(卷),期】2017(054)006【总页数】9页(P1202-1210)【关键词】双基地MIMO雷达;频控阵;角度、距离及速度联合估计;距离及速度解模糊【作者】赵智昊;王志民;孙扬【作者单位】解放军信息工程大学,郑州 450001;解放军信息工程大学,郑州450001;解放军信息工程大学,郑州 450001【正文语种】中文【中图分类】TN958多输入多输出(Multiple-Input-Multiple-Output,MIMO)雷达系统作为一种新的雷达体制,在近几年正受到越来越多的关注.相对于传统相控阵雷达,MIMO雷达能够利用雷达天线结构或是发射正交波形来提高雷达的自由度(DOFs),从而提升雷达的探测性能[1-5].目前,MIMO雷达主要分为分布式MIMO雷达[2]和集中式MIMO雷达[3]两种.其中,集中式MIMO雷达又可分为单基地MIMO雷达[6]和双基地MIMO雷达[7]两种.本文主要针对双基地MIMO雷达进行研究.雷达的主要作用之一就是获取目标的位置信息包括角度、距离和速度.利用双基地MIMO雷达我们能够得到目标的二维角度信息,同时利用脉冲雷达我们能够得到目标的距离和速度信息.然而,由于受到PRF的限制,距离估计精度和速度估计精度往往难以同时得到提高[8].不同于传统相控阵雷达,我们可以利用MIMO雷达波形分集的特征设计特殊波形来解决这一问题.一种有效的解决办法就是利用类似于FDA雷达的方法,让雷达波形中包含目标的角度-距离信息.不同于传统雷达,FDA雷达中的发射信号载频随着发射阵列而变化[9].由于不同天线发射载频不同,因此我们可以得到一种包含距离-角度信息的波形[10],从而能够对目标角度和距离进行同时估计[11].文献[12,13]将FDA和波形分集(WD)MIMO雷达相结合并研究其波形特性,文献[14,15]对频率分集下Phased-MIMO雷达的波形方向图进行了研究.关于FDA-MIMO雷达的参数估计,文献[16]利用了MLE算法实现了角度和距离的无模糊联合估计,而文献[17]则利用了基于稀疏重构的算法进行参数估计.然而文献[16]没有考虑角度-距离信息的耦合问题并进行相应的发射波形改进,因此,该方法下的角度估计CRB要高于传统MIMO雷达.通过这些研究,可以发现单基地的FDA-MIMO雷达能够获得目标的DOA和距离信息从而确定目标的2维位置,类似的,利用双基地FDA-MIMO雷达则可以估计目标的DOA、DOD和距离参数从而获得的3维坐标信息.对于角度-距离的耦合问题,文献[18]将发射阵列分为2个子阵并且每个子阵采用不同的频率增量,而文献[19]则通过发射频率增量分别为零和非零的两种脉冲来解耦合.同时,由于目标的多普勒频移与信号载频有关系,因此可以利用FDA-MIMO雷达信号载频的特征,在发射矢量中进一步挖掘目标的速度信息,从而解决利用多普勒测速的模糊问题.本文利用双基地FDA-MIMO雷达对目标的角度、距离和速度参数进行估计并对距离和速度参数进行解模糊处理.首先推导了FDA-MIMO雷达下的接收信号形式,通过推导发现了频率增量和目标速度之间的关系从而为速度解模糊提供条件.为了实现角度-距离信息的解耦合,本文设计了一种基于子阵的发射波形及相应的解耦合方法,并利用空间平滑和ESPRIT算法,得到目标的参数信息.然后根据距离的估计结果和脉冲法测得的结果对距离估计进行解模糊,另外结合FDA-MIMO雷达的特性,提出了一种基于MUSIC的速度解模糊算法解决了多普勒测速下的速度模糊问题.最后,本文推导了双基地FDA-MIMO雷达参数估计的CRB.考虑一个包含M个发射天线N个接收天线的双基地FDA-MIMO雷达系统,其发射天线的间距为dt接收天线的间距为dr.将第一个发射天线作为参考点,则第m个天线上的信号载频为fm=f0+(m-1)Δf,m=1,2,…,Ms m(t)=φm(t)ej2πfmt,0≤t≤T,m=1,2,…,M考虑一个无噪条件下的双基地FDA-MIMO雷达探测场景并选取第一个接收天线为接收端的参考点.第p(p=1,2,…,P)个目标的坐标为(Rtp,Rrp,θp,φp)且其速度为(vtp,vrp).其中Rtp和Rrp分别为目标-发射端距离和目标-接收端距离,θp和φp 分别为目标DOD和DOA,vtp和vrp分别表示目标-发射端和目标-接收端径向速度.0显示了该雷达系统工作场景.则经匹配滤波器处理后第l(l=1,2,…,L)个脉冲下,第p个目标从第m个发射天线到第n个接收天线的信号能够表示为xmnp(l)=ξpej2πfm(τpl-τm-τn)≈ξpej2π(f0+(m-1)Δf)((Rtp+Rrp-vtpτpl-vrpτpl)/c-dt(m-1)sin(θp)/c-dr(n-1)sin(φp)/c)=其中,ξp表示目标的复散射系数;τpl表示第l个脉冲下发射参考点到接收参考点之间的时延;τm和τn分别是第m个发射天线和第n个接收天线的相对时延;Rp=Rtp+Rrp表示两个距离之和而vp=vtp+vrp表示两个速度之和.如式(3)所示,对于第p个目标而言,e-j2π(m-1)dtsin(θp)/λ和e-j2π(m-1)ΔfRp/c分别包含了DOD和距离信息并且与发射阵列有关;在e-j2πf0vp(l-1)T/c中,f0vp/c表示目标的多普勒频移且其与脉冲数有关;e-j2π(n-1)drsin(φp)/λ包含了目标的DOA信息且与接收阵列有关;而e-j2π(m-1)Δfvp(l-1)T/c包含了速度信息且与发射阵列和脉冲数有关,并且当脉冲数l较小的时候其大小相对于其他部分可以忽略,而当l较大且其大小可以测量时,该项可以用来解决速度估计模糊的问题.如果令第一个发射天线作为参考点,则对于第p个目标而言,FDA-MIMO雷达的发射矢量为at(θp,Rp)=x(l)=Ar(φ)diag(a(v,l))At+w(l)因而L个脉冲后的接收信号经向量化后可以表示为Y=(B(v)⊙At(θ,R)⊙Ar(φ))h+WRY=(B(v)⊙At(θ,R)⊙Ar(φ))Rh+Q=CRhCH+Q矩阵RY的秩为1且会导致特征分解后无法获得信号子空间和噪声子空间矩阵.因此,我们利用空间平滑技术解决这一问题;同时,考虑到角度兼并问题,我们采用类似于文献[21]的方法,针对接收导向矢量和多普勒矢量进行前向空间平滑得到矩阵对进行特征分解得到信号子空间矩阵Es∈Cl0Mn0×P.由于span{Es}=span{C0},则Es能被表示为Es=C0T-1将Es分为2个子矩阵Es1和Es2,然后我们可以得到0=EsUs根据0 s的特点,可以得到DOD、DOA、距离和速度的估计值然后对DOD和距离进行分离操作由于同一目标的4个参数是从联合导向矢量的同一列估计得出,因此,所有的参数均已自动配对.同时,由于是对接收导向矩阵和速度矩阵同时进行空间平滑处理,因此目标的角度兼并问题能够得到缓解.然而当目标DOA和速度相同时则仍会存在角度兼并问题.考虑到发射波形和估计过程与传统MIMO雷达已经不同,为了防止DOD估计的模糊问题,发射天线的间距不应大于λ/4.根据前文的方法可知,当频率增量Δf增大时距离估计的精度也随之增加.然而,当|ΔfRp/c|>1/4将会产生距离估计模糊.类似文献[16],这里我们可以结合距离估计的脉冲法来解模糊.对于第p个目标,假设脉冲法下的目标真实距离为则在FDA-MIMO雷达下利用ESPRIT方法的目标无模糊距离估计可以表示为根据式(18)和式(19),我们能够得出无模糊的距离估计值:关于频率增量的选择可以采用类似文献[16]的方法.但要注意的是,由于将发射端分割为2个子阵且采用了相应的解耦合算法,因此,本文的频率增量应为文献[16]中频率增量的一半.通过式(3)可知,f0T越大,速度估计的精度就越精确.同时,当PRF越大,多普勒模糊就越小,且当|f0vpT/c|>1/2时,速度估计将会出现模糊.我们可以利用接收信号中e-j2π(m-1)Δfvp(l-1)T/c这一项来解决这一模糊问题.首先,我们选择较大的脉冲数值l=La,La>L使得e-j2π(m-1)Δfvp(l-1)T/c能够被测量,且此时的接收信号为x(La)=(At(θ,R,v,La)⊙Ar(φ))aP(v,La)+w(La)=Cv(La)+w(La)类似的,利用空间平滑方法可以得到基于两个发射子阵的协方差矩阵和假设第p个目标的真实速度为为了研究双基地FDA-MIMO雷达的性能,我们推导了4个参数的CRB,同时也对发射端距离和DOD信息的耦合问题进行了分析.首先,我们计算无模糊条件下的CRB.未知参数如下利用Schur变换,将FIM变为其中λ.通过G的推导结果,我们可以看到由于对发射端进行了基于子阵的设计使得距离和角度信息不再耦合,因此Eθ和ER存在差异使得FIM能够进行求逆计算.因此,速度、DOD、距离和DOA的CRB分别为Dv=Dθ=DR=Dφ=在对距离和速度进行相应的解模糊处理后,这两个参数的CRB也随之改善.根据文献[16]的分析,当Δf≤B/2Na时,距离估计的CRB为DR≥另外,根据1/100<ΔfNvLa/2f0<1,我们可以得到f0<ΔfNvLa/2,则速度估计的CRB得到了改善,相较于之前的CRB更小.Dv>为了验证上述联合角度、速度、距离参数估计的性能,本章节将进行2个仿真实验,仿真条件如表1所示.为了验证双基地FDA-MIMO雷达的性能,我们将其与传统双基地MIMO雷达和相控阵雷达进行比较.本例中,我们研究了这几种雷达参数估计的RMSE关于SNR 的变化情况.假设空间中有2个目标,一个目标的DOD为20°,DOA为25°,距离为180 km,速度为430 m/s,另一个DOD为30°,DOA为35°,距离为270 km,速度为360 m/s,采样点数为256,仿真进行了1000次蒙特卡洛实验,值得注意的是,2个目标速度和距离在传统方法中均能产生模糊.图2为4个参数的RMSE关于SNR的变化情况,通过实验我们能得出以下结论:1) 所有参数的RMSE均随SNR的增加而减少; 2) 由于FDA-MIMO雷达和传统MIMO雷达的发射阵列结构相同,同时,FDA-MIMO雷达发射端的特殊设计,因此这FDA-MIMO雷达与传统MIMO雷达的DOD和DOA估计结果相似,同时FDA-MIMO雷达还能够对目标距离进行估计; 3) 由于发射端关于解耦合的波形设计,因此FDA-MIMO雷达和传统MIMO雷达的角度CRB相同,相较于文献[16]中FDA-MIMO雷达角度估计性能有所改善; 4) 由于虚拟孔径的增加,因此两种MIMO雷达的DOA估计相较于相控阵雷达更精确; 5) 由于没有充分利用MIMO雷达发射分集的特性,因此传统MIMO雷达和相控阵雷达均无法对速度和距离进行无模糊估计.本例中,我们研究了FDA-MIMO雷达、传统双基地MIMO雷达和相控阵雷达参数估计的RMSE关于采样点数的变化情况,仿真条件与前者相同,其中SNR=0 dB,仿真结果如图3所示,通过图3可以发现,由于采样点数越多,接收到的信息量就越大,因此4个参数的RMSE均随着采样点数的增加而提高,而MIMO雷达由于虚拟孔径的存在,其角度估计相较于相控阵雷达的精度更高.同样,由于发射端和参数估计的方法改进,因此双基地FDA-MIMO雷达在保证角度估计的精度与传统MIMO雷达相同的情况下还能够进行距离和速度的无模糊估计.本文提出了一种基于双基地FDA-MIMO雷达的联合角度、速度、距离无模糊估计方法,在该方法中,我们充分利用MIMO雷达发射分集的特性,让不同天线发射不同频率的信号,产生了一种随目标距离和角度变化的波形.为了解决角度-距离信息耦合问题,我们设计了基于子阵的发射波形,同时利用空间平滑和ESPRIT算法,得到了4个参数的估计,结合传统脉冲法测距和发射信号中的速度信息,目标距离和速度的估计模糊问题得以解决.同时文章对于双基地FDA-MIMO雷达下4个参数的CRB进行了推导.仿真结果证实了双基地FDA-MIMO雷达在参数估计尤其是距离和速度无模糊估计上的优越性.【相关文献】[1] Fishler E,Haimovich A,Blum R.MIMO radar:an idea whose time has come[C]//Proceedings of the IEEE Radar Conference Philadelphia,A:IEEE Press,2004.[2] Haimovich A M,Blum R S,Cimini L J.MIMO radar with widely separated antennas [J].IEEE Signal Proc Mag,2008,25:116.[3] Gong P C,Li J,Zhang Z W,et al.Adaptive parameter estimation for colocated MIMO radar via sparse model [C] //Proceedings of the IEEE International Conference on Communication Problem-Solving (ICCP) .Guilin:IEEE,2015.[4] 顾帅楠,李玉翔,赵峰,等.基于非均匀子阵划分的MIMO雷达阵列设计研究 [J].四川大学学报:自然科学版,2017,54:309.[5] 袁德诚,王运锋.杂波环境下雷达新建航迹处理方法分析 [J].四川大学学报:自然科学版,2017,54:89.[6] Gupta V,Mishra A,Dwivedi S,et al.SBL-based joint target imaging and ler frequency estimation in monostatic MIMO radar systems [C] //Proceedings of the IEEE International Conference on Acoustics,Speech and Signal Processing (ICASSP) .Shanghai:IEEE,2016. [7] Willis N J,Griffiths H D.Advances in BISTATIC RADAR [M].Raleigh,NC:SciTech Publishing,2007.[8] Hovanessian S A.An algorithm for calculation of range in a multiple PRF radar [J].IEEE Trans Aerosp Elec Syst,1976,12:287.[9] Antonik P,Wicks M C,Grifiths H D,et al.Range-dependent beamforming using element level waveform diversity [C] //Proceedings of the International Waveform Diversity Design Conf s Vegas,NV,USA:WDDC,2006.[10] Xu J W,Xu Y H,Liao G S.Direct data domain based adaptive beamforming for FDA-MIMO RADAR [C] //Proceedings of the IEEE Statistical Signal Processing Workshop (SSP).Spain,Palma de Mallorca:IEEE,2016.[11] Wang W Q,So H C.Transmit subaperturing for range and angle estimation in frequency diverse array radar [J].IEEE Trans Signal Proc,2014,62:2000.[12] Sammartino P F,Baker C J,Griffiths H D.Range-angle dependent waveform [C]//Proceedings of the IEEE Radar Conference.Washington,DC,USA:IEEE,2010.[13] Sammartino P F,Baker C J,Griffiths H D.Frequency diverse MIMO techniques for radar [J].IEEE Trans Aerosp Elec Syst,2013,49:201.[14] Wang W Q,Shao H Z.A flexible phased-MIMO array antenna with transmit beamforming [J].Int J Antenn Propag,2012 (1):473.[15] Wang W Q.Phased-MIMO radar with frequency diversity for range-dependent beamforming [J].IEEE Sensors J,2013,13:1320.[16] Xu J W,Liao G S,Zhu S Q,et al .Joint range and angle estimation using mimo radar with frequency diverse array [J].IEEE Trans Signal Proc,2015,63:3396.[17] Chen H,Shao H Z.Sparse reconstruction based target localization with frequency diverse array MIMO radar [C] //Proceedings of the IEEE China SIP Conference on Signal and Information Processing.Chengdu:IEEE,2015.[18] Wang Y B,Wang W Q.Frequency diverse array radar Cramér-Rao lower bounds for estimating direction,range,and velocity [J].Int J Antenn Propag,2014 (12):1.[19] Wang W Q,Shao H Z.Range-angle localization of targets by a double-pulse frequency diverse array radar [J].IEEE J Sel Top Signal Proc,2014,8:106.[20] Wang Y B,Wang W Q,Hong S,et al.Optimal frequency diverse subarray design with cramér-rao lower bound minimization [J].IEEE Antenn Wirel Pr,2015,14:1188.[21] Hong S,Ke H Y,Wang X R,et al.Covariance differencing-based matrix decomposition for coherent sources localisation in bi-static MIMO radar [J].IET Radar,SonarNavig,2014,9:540.。
MIMO雷达技术在目标跟踪中的应用研究
MIMO雷达技术在目标跟踪中的应用研究摘要:随着雷达技术的不断发展,多天线雷达系统(MIMO)日益受到关注。
MIMO雷达技术利用多个发射和接收天线以及高效的信号处理算法,可以提供更高的分辨率、更好的目标检测和跟踪性能。
本文对MIMO雷达技术在目标跟踪中的应用进行了研究,并讨论了其优势、挑战以及未来发展方向。
第1节:引言雷达技术在军事、民用及航空航天等领域具有广泛的应用。
然而,传统雷达系统存在分辨率低、抗干扰能力差等问题。
为了克服这些问题,研究人员提出了MIMO雷达技术,并在目标跟踪中取得了显著的成果。
第2节:MIMO雷达技术的原理MIMO雷达技术利用多个独立的发射和接收天线,通过对不同天线之间的相互干扰进行分析和处理,可以提供比传统雷达系统更高的分辨率和灵敏度。
多个发射天线可以同时向目标发送多个不同的波束,而多个接收天线可以同时接收目标反射的信号。
通过对接收信号进行联合处理,可以实现对目标的跟踪和定位。
第3节:MIMO雷达技术在目标跟踪中的应用MIMO雷达技术在目标跟踪中发挥了重要的作用。
首先,它可以提供更高的分辨率,从而可以更准确地检测和辨识目标。
其次,多个发射天线和接收天线之间的相互干扰可以用于目标类别识别,可以通过分析干扰的特征来判断目标的类型。
此外,MIMO雷达技术还可以提供更好的抗干扰能力,通过分析多个天线接收到的信号,可以有效地抑制噪声和其他干扰。
最后,MIMO雷达技术可以提供更高的定位准确度和跟踪性能,通过对多个接收天线接收到的信号进行联合处理,可以实现对目标的精确定位和跟踪。
第4节:MIMO雷达技术的挑战尽管MIMO雷达技术具有许多优势,但也面临着一些挑战。
首先,MIMO雷达系统需要大量的天线和高效的信号处理算法,这增加了系统的复杂性和成本。
其次,MIMO雷达系统在实际应用中受到地面反射、散射等问题的影响,这可能导致目标跟踪的误差和不准确性。
此外,MIMO雷达系统对于目标的信号特征和传播环境的要求较高,需要深入研究和优化。
双基地MIMO雷达多目标角度和多普勒频率联合估计

MO雷 达_ 。空 间分 集 MI l 3 1] MO 雷 达 的 阵 元 采 用 大 间 隔配置 方式 , 发射 波从不 同角度 照射 目标 , 充分利 用 空域 信息来 克服 目标 的闪 烁 效应 , 而 提 高 目标 雷 达 工 作 原 理
sm ua i n r s ls v rf h a iiy a d f a i i t ft e e me h d . i lt e u t e iy t e v l t n e sb l y o h s t o s o d i Ke r s h s a i M I O a a ; y wo d : it t M e r d r DOA- DOD s i t n Do p e r q e c s i t n et ma i p lrf e u n y e t i o ma o
第 2 8卷 第 1期
航天 电子对 抗
2 7
双 基 地 MI MO 雷 达 多 目标 角 度 和 多普 勒 频 率联 合 估 计
邵玉 卓 , 陶建锋 , 艺夺 , 郭 鲁毓 维
( g工程 大学导弹 学 院, 西 三 原 空- 陕 73 0 ) 1 8 0
摘 要 : 将 MI O 思 想 和 双 基 地 雷 达 结 合 起 来 , 据 信 号 模 型 , 出一 种 双 基 地 MI ) M 根 提 M(
0 引言
MI MO雷达 按 其 收 发 阵 元 的 配 置 方 式 可 分 为 两
种类 型 : 间分集 MI 空 MO 雷 达L 和单 ( ) 地 MI 1 双 基 —
值 分解 , 运算 量小且 估计 的参 数可 以 自动 配对 , 论分 理
析 和计算 机仿 真结 果验证 了所 给 出算 法 的正确性 和有
MIMO雷达技术及其应用研究

MIMO雷达技术及其应用研究作者:刘涛来源:《无线互联科技》2015年第12期摘要:随着科学技术的迅速发展,雷达技术水平的不断提高。
MIMO雷达作为一种新体制雷达,在遥感、导航、资源探索、气象预报、天体研究等民用领域和国防等领域被广泛应用,并且充分发挥了其积极的作用。
文章从MIMO雷达概述入手,就其技术和应用进行了详细的探究。
关键词:MIMO;雷达;空间分集;成像MIMO作为一种新兴体制的雷达,在跟踪、目标定位、参数估计和目标检测等方面具有比传统雷达更高的优势,所以其已经逐渐成为雷达技术领域的研究热点。
下面就MIMO雷达技术及其应用方面的内容进行了探究,以期更好地指导后续相关方面的研究和应用的开展。
1 MIMO雷达概述1.1 MIMO雷达的含义MIMO雷达又被称为多输入多输出系统,其最初主要只是作为控制系统中的一个概念被提出,而在雷达领域中则指代相应的雷达系统具有多个输出和输入。
如果将相应的通信传输通道比作一个完整的系统,则相应的系统通信信道的输入信号和输出信号则就相应的指代发射信号和接收信号。
另外,MIMO雷达在探测目标的时候可以借助多个正交信号,并且所有的发射信号均可以由接收端的各个阵元来进行接收,同时也可以需要采取滤波组来尽量获得更可能多的多路回波从而额可以大大提高观测通道的数目和雷达的整体性能。
1.2 MIMO雷达的工作原理MIMO雷达可以在多阵元天线结构的基础上实现正交信号的同时发射,并且可以做到M 发N收,即MIMO雷达可以借助N个接收阵元来接收相应的多个波形信号。
鉴于不同信号之间的正交特性,所以即便是多个发射信号也不会出现相互干扰的问题,可以始终保持独立性,同时这样也可以使相应的发射和接收物理空间保持MN个通道,且每个特定的通道均与一个发射阵元及其对应的接收路径和收发阵元的位置和所接受。
另外,接收端的各个接收阵元会配有M个发射波形来匹配对应的M个滤波器,接着通过分选正交性就可以获得相应的MN通道回波数据。
双基地MIMO雷达

雷达起源于上世纪30年代,通过发射以及接收电磁信号,雷达能够精准的检测出飞机并确定其空间位置。
因此,雷达被广泛地应用于军事领域并给军事领域带来了巨大变革。
各种雷达技术在第二次世界大战后得到了迅猛发展。
但随着电子干扰等反雷达技术的发展,传统雷达的工作环境日趋恶劣,其性能也受到了限制,反隐身能力弱、生存能力弱、目标RCS闪烁使雷达性能衰退等缺点也逐渐暴露出来。
为了改善雷达在目标探测、定位跟踪精度、抗干扰等方面的性能,使雷达能够更好地投身于现代战争中,各种新型体制雷达应运而生,例如,无源雷达、多基地雷达、分布式雷达等,其中研究最为热门的是双/多基地雷达和MIMO雷达。
2003年,集中式MIMO雷达错误!未找到引用源。
首次被美国林肯实验室D.J.Rabideau 等人提出,它也被称作共址MIMO雷达。
集中式MIMO雷达的阵元分布与传统雷达阵列分布相似,收发阵列集中放置,且阵元间距较小。
与传统相控阵雷达不同的是,集中式MIMO雷达发射端发射彼此正交的信号,具有波形分集增益,因此,有着更好的参数辨别能力。
在2004年IEEE雷达会议上,分布式MIMO 雷达错误!未找到引用源。
被贝尔实验室科研人员提出,也被称作统计MIMO雷达。
分布式MIMO雷达的阵元在空间内分布较远,利用各阵元在不同角度下观测到目标散射特性的差异,可以获取较高的空间分集增益,从而能较大程度的减小目标RCS闪烁对雷达目标检测的影响。
上述两种MIMO雷达都各有应用前景与优势,但由于集中式MIMO雷达与相控阵雷达结构相似,因此,集中式MIMO雷达可以借助传统相控阵雷达中的信号处理理论来进行信号处理[10-12]。
故在理论研究与工程应用上,集中式MIMO雷达更容易实现,因而,倍受关注与研究。
本文的研究对象——双基MIMO雷达属于收发站分置的集中式MIMO雷达。
围绕双基MIMO雷达仿真平台展开工作。
目标跟踪与定位是该仿真平台的核心模块,该仿真平台的主要任务就是能够对目标进行精准跟踪。
双基地MIMO雷达多目标高精度跟踪算法
双基地MIMO雷达多目标高精度跟踪算法张正言;张剑云【摘要】针对双基地多输入多输出(multiple-input multiple-output,MIMO)雷达自适应非对称联合对角化(adaptive asymmetric joint diagonalization,AAJD)跟踪算法在低信噪比时失效的问题,提出一种双基地MIMO雷达高精度跟踪算法.首先,针对低信噪比时AAJD算法信号子空间扩展问题,利用主成分顺序估计原理求出特征值,根据特征值的大小对导向矢量进行排序,得到更加精确的信号子空间.其次,根据跟踪状态的不同,将多目标分类(multiple signal classification,MUSIC)算法分为两步:第一步全空域大步长扫描,对应跟踪非稳定状态;第二步小空域小步长扫描,对应跟踪稳定状态,空域范围由上一时刻估计角度和运动速度确定,并将峰值搜索过程变为取最大值操作,降低了计算量.算法解决了低信噪比时信号子空间扩展问题,提高了跟踪性能,且采用了性能更高的MUSIC算法,并对其进行改进,降低了计算量.仿真结果证明了算法的有效性.【期刊名称】《系统工程与电子技术》【年(卷),期】2018(040)006【总页数】8页(P1241-1248)【关键词】双基地多输入多输出雷达;角度跟踪;多目标分类;高精度;扩展信号子空间【作者】张正言;张剑云【作者单位】国防科技大学电子对抗学院,安徽合肥230037;国防科技大学电子对抗学院,安徽合肥230037【正文语种】中文【中图分类】TN9580 引言阵列雷达通过综合利用空间和时间信息处理技术提高了估计性能,多输入多输出(multiple-input multiple-output,MIMO)雷达进一步发展了这种技术,取得了更大的优势,属于新的雷达体制[1]。
与传统的相控阵雷达不同之处在于MIMO雷达各个发射天线的信号是正交的,而相控阵雷达则是相关的,因此MIMO雷达拥有空间分集,波形分集等优势,等效于拥有更多的阵元,能够探测更多的目标[2-5]。
双基地MIMO雷达目标定位及幅相误差自校正算法
双基地MIMO雷达目标定位及幅相误差自校正算法李洪兵;姜军;田海林;季军亮;郭艺夺【摘要】针对双基地多输入多输出(MIMO)雷达收发阵列存在幅相误差的情况,提出了一种基于辅助阵元法(ISM)的ESPRIT类算法.在收发端分别设置若干个精确校正的辅助阵元,可实现对目标收发方位角和幅相误差系数的无模糊联合估计,在角度估计过程中无需任何收发阵列幅相误差系数信息,无需谱峰搜索,运算量较小.算法未使用对阵列误差的微扰动及第一个收发阵元的幅相误差进行归一化的假设,更符合实际的误差模型.【期刊名称】《上海航天》【年(卷),期】2014(031)004【总页数】6页(P11-16)【关键词】双基地MIMO雷达;目标定位;幅相误差;自校正【作者】李洪兵;姜军;田海林;季军亮;郭艺夺【作者单位】空军工程大学防空反导学院,陕西西安710051;空军工程大学防空反导学院,陕西西安710051;空军工程大学防空反导学院,陕西西安710051;空军工程大学防空反导学院,陕西西安710051;空军工程大学防空反导学院,陕西西安710051【正文语种】中文【中图分类】TN911.70 引言双基地MIMO雷达的回波信号中包含了目标相对发射阵列的发射角及接收阵列的到达角信息,因此可通过估计目标的DOD,DOA实现对目标的交叉定位[1-8]。
这些算法均以发射和接收阵列流型精确已知为前提,其性能优良。
在实际工程应用中,由于存在各种误差(阵元幅相误差、阵元间互耦等),双基地MIMO雷达的发射和接收阵列流形常出现一定程度的偏差或扰动,上述的各种定位算法因对模型误差的鲁棒性很差,微小的模型扰动会带来目标定位性能的急剧恶化。
因此,研究对误差鲁棒的目标定位算法及简便有效的阵列校正方法在双基地MIMO雷达实际应用中有重要意义。
双基地MIMO雷达因发射端采用多个发射阵元发射相互正交的信号,其阵元通道的幅相误差可通过接收阵列和发射阵元引入,从而使发射和接收阵列的幅相误差耦合,这增加了系统幅相误差的复杂度,对双基地MIMO雷达的多目标定位和通道幅相误差的校正提出了更高的要求。
一种新的双基地MIMO雷达目标定位和多普勒频率估计方法
中图分类号 : N 5.1 T 97 5 D I 1. 2/PJ 16 09 12 O : 0 74S .14. 0. 39 3 . 2 0
文献标识码 : A
文章编号: 09 8621)926-5 10— 9 ( 00—17 5 0 0
A v lM e h d f r T r e c l a i n a pp e No e t o o a g t Lo a i to nd Do l r z
仿真结果表 明,与基于 E P I 的方法相 比,该文方法能够估计 目标的多普勒频率 ,消接收阵列不具备平移不变结构的条件 下仍具适用性 。
关键 词 :MI O 雷达 ;双 基 地 ;多 阶 段 分 解 ;迭 代算 法 ;循 环 最 小 化 M
F e ue c tm a i n i s a i I O d r q n y Es i to n Bit tcM M Ra a r
L i n Hu F n -h n e g Da z e g He J e i Xi n n a g Co g
( a o aL b o aa i a Poes gX d nU ie i , i n707 , hn) N t n l a.f dr g l r s n, ii nvr t X ' 101 C ia i R Sn c i a sy a
Ab t a t Th sp p rp e e t o e e h d f rt r e o a i a i n a d Do p e s r c : i a e r s n sa n v l m t o o a g tl c l to n p lr ̄e u n y e tma i n i it tc z q e c s i to b sa i n MI O a a . tl i gt eb o t o o a iy o t i e . e s n b ec s u c i n i o s r c e . aie a ie y M r d r By u i z n h i r h g n t fma rc s a r a o a l o tf n to s n t u t d Vi r tv l i l c t
MIMO雷达报告

MIMO雷达报告MIMO雷达(Multiple-Input Multiple-Output Radar)是一种新型的雷达技术,利用多个天线传输和接收信号,使雷达系统能够获得更多的信息,提高目标检测和跟踪的性能。
本报告将对MIMO雷达的原理、优势以及应用进行详细介绍。
首先,MIMO雷达能够在同一时间同时向多个方向发送多个波束。
由于传统雷达系统一次只能向一个方向发送波束,因此对于多目标的情况下,传统雷达需要不断切换方向进行扫描,导致检测和跟踪的效率较低。
而MIMO雷达可以同时发射多个波束,大大提高了目标的检测和跟踪的效率。
其次,MIMO雷达能够通过接收到的多个信号,利用信号处理算法进行波束合成。
传统雷达系统只能接收单一的回波信号,往往受到多径效应的影响,导致目标检测和跟踪的性能下降。
而MIMO雷达通过接收到的多个信号,可以通过信号处理算法进行波束合成,抑制多径效应,提高目标检测和跟踪的性能。
再次,MIMO雷达具有较高的分辨率和定位精度。
传统雷达系统在目标方向分辨率和定位精度上受到限制,难以区分靠近的目标。
而MIMO雷达通过利用多个天线间的空间间隔,可以分辨更多的目标,提高了目标的定位精度。
最后,MIMO雷达在对抗电子干扰方面具有较强的能力。
由于MIMO雷达可以通过变化波束的形状和方向,使得电子干扰难以对其产生影响,提高了雷达系统的抗干扰能力。
除了上述的优势之外,MIMO雷达还具有广泛的应用前景。
例如,MIMO雷达可以在无人机领域应用,在目标的检测和跟踪方面大大提高性能;MIMO雷达还可以应用于自动驾驶技术中,实现对周围车辆和障碍物的精准感知;同时,MIMO雷达还可以应用于军事领域,提高战场上的目标侦测和定位能力。
总之,MIMO雷达是一种具有许多优势的新型雷达技术,能够实现多目标的同时检测和跟踪,提高目标的定位精度和抗干扰能力。
在未来的应用中,MIMO雷达有望在无人机、自动驾驶以及军事等领域发挥重要作用。
MIMO雷达研究综述

MIMO雷达研究综述MIMO(Multiple-Input Multiple-Output)雷达技术是一种利用多个发射天线和多个接收天线进行雷达探测的技术。
与传统的单发单收雷达相比,MIMO雷达具有更高的分辨率、更好的信号强度和抗干扰能力。
近年来,MIMO雷达已经受到了广泛的关注,并在不同领域展示了巨大的潜力。
本文将对MIMO雷达的研究进展进行综述。
MIMO雷达的关键思想是通过多个发射天线同时发送不同的信号,利用接收天线接收并分析接收信号的相位和幅值来获取目标的位置和速度信息。
通过增加发射和接收天线的数量,MIMO雷达能够形成具有多个维度的波束,从而提高目标检测和跟踪的准确性和可靠性。
另外,MIMO雷达还可以在同一频带上同时实现几个不同的功能,如目标检测、目标分类和目标探测等。
在MIMO雷达的研究中,信号处理是一个关键的方面。
由于MIMO雷达采用了多个发射和接收天线,传感器之间的互相干扰成为了一个主要挑战。
因此,研究人员提出了许多方法来减小互相干扰,如自适应波束形成、空间分集和空间编码等。
此外,研究人员还通过优化发射波形的设计来提高雷达系统的性能。
例如,采用多载波调制技术可以提高信噪比和频谱利用率。
除了信号处理外,MIMO雷达在目标跟踪和成像方面也有了重要的进展。
通过利用多个发射和接收天线的观测数据,可以实现更高精度的目标跟踪和成像。
研究人员提出了许多基于MIMO雷达的目标跟踪算法,如最大似然估计、粒子滤波和卡尔曼滤波。
此外,MIMO雷达还可以通过多个方向的观测数据来重建目标的图像,从而实现高分辨率的目标成像。
此外,MIMO雷达还具有其他应用方面的潜力。
例如,MIMO雷达可以用于无人机的自主导航和避障,通过实时探测和跟踪周围的目标和障碍物来指导无人机的飞行路径。
此外,MIMO雷达还可以用于无线通信系统中的频谱感知和分布式多用户检测等领域。
综上所述,MIMO雷达作为一种新兴的雷达技术,在目标检测和跟踪、成像以及其他领域已经取得了重要的进展。
【国家自然科学基金】_双基地多输入多输出雷达_基金支持热词逐年推荐_【万方软件创新助手】_20140803

2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
科研热词 推荐指数 双基地雷达 2 自动配对 1 空时自适应处理(stap) 1 离开角 1 相干多目标 1 波形相关性 1 杂波抑制 1 最小均方误差 1 快速估计 1 多输入多输出雷达 1 多输入多输出(mimo)雷达 1 多输入多输出 1 双基地多输入多输出雷达 1 单次快拍 1 到达角 1 传播算 5 6 7 8 9 10 11 12 13 14 15 16 17 18
科研热词 推荐指数 双基地多输入多输出雷达 2 闭式解 1 空间定位 1 离开角 1 波达方向 1 波离方向 1 幅相误差 1 容差性 1 多输入多输出雷达 1 多目标定位 1 多普勒频率 1 双基地mimo雷达 1 单周期回波 1 到达角 1 传播算子法 1 传播算子 1 music-like 1 m-capon方法 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
科研热词 mimo雷达 双基地 角度估计 降维music 联合估计 空间高斯色噪声 空间高斯白噪声 矩阵束 相干源 相干信源 求根music 杂波建模 杂波单元 最小二乘 奇异值分解 多级维纳滤波 多目标定位 多普勒频率 四线性分解 四元数 双基地mimo雷达 单快拍 信号子空间
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
2010年 科研热词 推荐指数 高度测量 1 配对 1 虚拟阵元技术 1 波达方向 1 波离方向 1 检测 1 定位 1 多输入多输出雷达 1 多目标分辨 1 双基地雷达 1 双基地多输入多输出雷达 1 双基地mimo雷达 1 esprit谱搜索法 1
MIMO双基地雷达目标参数测量方法研究
MIMO双基地雷达目标参数测量方法研究MIMO双基地雷达目标参数测量方法研究摘要:雷达技术在现代军事和民用领域中有着广泛的应用,其中目标参数测量是雷达系统的重要功能之一。
本文针对MIMO双基地雷达目标参数测量方法进行了研究。
首先介绍了雷达系统的基本原理和MIMO双基地雷达系统的结构,然后详细阐述了MIMO双基地雷达目标参数测量的原理和方法,并分析了各种参数测量方法的优缺点。
最后,通过数值模拟和实验结果验证了MIMO双基地雷达目标参数测量方法的有效性和准确性。
关键词:雷达系统;MIMO双基地雷达;目标参数测量;方法研究;优缺点分析1. 引言雷达系统是通过发射和接收电磁波来探测和跟踪目标的设备。
目标参数测量是雷达系统中的重要应用之一,能够获得目标的位置、速度、方位角、俯仰角等重要参数信息。
传统雷达系统通常采用单基地测量方法,但在复杂环境下存在一些限制,如测量精度不高、信号干扰等。
为了克服这些限制,近年来,MIMO双基地雷达方法被提出并在目标参数测量领域得到广泛研究。
2. MIMO双基地雷达系统结构MIMO双基地雷达系统由多个发送天线和接收天线组成,可以同时发射多个不同的信号,接收多个接收天线的反射信号。
具体结构包括两个基地雷达站,每个站点包含多个发射天线和接收天线。
这种结构可以提高雷达系统的灵敏度和抗干扰能力,并进一步提高目标参数测量的精度。
3. MIMO双基地雷达目标参数测量原理MIMO双基地雷达目标参数测量的原理是通过接收到的多路径信号进行分析和处理,根据信号的到达时间差、唯一性和接收信号强度等信息,计算出目标的位置和其他参数。
由于MIMO 双基地雷达系统具有多个发射和接收点,可以利用多个接收信号之间的差异来准确计算目标的参数。
4. MIMO双基地雷达目标参数测量方法研究根据多径信号特点和目标参数测量要求,可以选择不同的方法进行目标参数测量。
一种常用的方法是基于信号到达时间差测量的方法,该方法利用不同接收点之间的信号到达时间差来确定目标的位置和速度。
mimo虚拟阵列原理

MIMO(Multiple-Input Multiple-Output,多输入多输出)虚拟阵列是一种无线通信技术,它利用多个天线同时传输和接收信号,以实现更高的数据传输速率和改善系统性能。
MIMO虚拟阵列原理基于下述两个主要概念:空间复用和空间多样性。
1. 空间复用:MIMO虚拟阵列利用天线的多样性,将无线信道划分为多个独立的子信道。
每个子信道都可以独立地传输不同的数据流,实现多用户同时传输或接收数据的能力。
这种空间复用技术可以有效地提高无线系统的频谱效率。
2. 空间多样性:MIMO虚拟阵列通过在发送端和接收端使用多个天线,以利用信号在空间中的多个路径传播的特性。
由于无线信号在传播过程中经历反射、绕射和散射等现象,通过多个天线接收到的信号可以包含不同的路径增益和相位信息。
通过处理这些多径信号,系统可以利用空间多样性,提高通信质量和可靠性。
MIMO虚拟阵列系统在工作过程中,主要通过以下步骤实现数据传输:1. 发送端数据分流:待发送的数据通过调度算法被分成多个数据流。
每个数据流将被分配到不同的天线,以在空间上实现多样性传输。
2. 空间编码:发送端将数据流与一个空间编码矩阵相乘,以利用多个天线的多样性。
空间编码矩阵的作用是将数据流在空间上进行映射,并引入适当的编码冗余,以提高系统的抗干扰能力和误码率性能。
3. 信号发送:空间编码后的信号通过多个天线同时发送到空间信道中。
4. 接收端信号处理:接收端的多个天线同时接收到经过空间信道传播的多径信号。
通过对接收到的信号进行多通道处理、空时信号检测和解调,可以恢复出原始数据流,以及估计信道状况。
MIMO虚拟阵列技术在无线通信系统中已被广泛应用,如Wi-Fi、LTE(Long Term Evolution)和5G等。
它通过利用空间复用和空间多样性,可以显著提高带宽利用率、提供更高的数据传输速率和增强无线信号的可靠性。
基于实值处理的双基地MIMO雷达测角方法研究
基于实值处理的双基地MIMO雷达测角方法研究基于实值处理的双基地MIMO雷达测角方法研究摘要:雷达作为一种重要的无源探测技术,在航空、军事、交通等领域有着广泛的应用。
在雷达目标探测与跟踪中,精确的角度估计是非常关键的。
本文针对双基地MIMO雷达系统进行了研究,提出了一种基于实值处理的测角方法。
通过使用多个基站和多个天线,我们可以大幅提高雷达系统的角度估计精度。
1. 前言雷达技术是一种通过发送电磁波并接收回波来探测目标的技术。
传统的雷达系统通常具有单个基站和多个天线的结构,其角度测量能力受限。
为了提高雷达的角度估计精度,近年来双基地多输入多输出(MIMO)雷达系统逐渐引起了研究人员的关注。
2. 双基地MIMO雷达系统双基地MIMO雷达系统是一种通过在不同位置布置多个基站和多个天线来实现目标的角度估计。
通过同时接收不同基站接收到的回波信号,我们可以利用信号的相位差来计算出目标的入射角度。
3. 基于实值处理的测角方法在双基地MIMO雷达系统中,传统的测角方法通常使用相位差来计算入射角度。
然而,由于相位的周期性特征,相位差的计算存在模糊性。
因此,本文提出了一种基于实值处理的测角方法。
该方法首先将接收到的回波信号进行时延估计,得到信号的到达时间差。
然后,通过求解包络线交点的法线方向,计算出目标的入射角度。
4. 实验结果与分析为验证所提出的测角方法的有效性,我们在仿真环境下进行了实验。
实验中使用了两个基站和四个天线,模拟了目标以不同入射角度进入雷达系统的情况。
实验结果表明,所提出的基于实值处理的测角方法相比传统的相位差测角方法具有更高的精度和更小的误差。
该方法能够有效地克服相位差计算中的模糊性问题,提高了角度估计的准确性。
5. 总结与展望本文基于实值处理的测角方法在双基地MIMO雷达系统中取得了良好的效果。
通过实验验证,我们证明了该方法能够提高雷达系统的角度估计精度。
然而,该方法仍然存在一些限制,例如目标多普勒效应的影响以及复杂场景中的多径干扰等。
双基地MIMO雷达三维空间目标参数估计算法
双基地 MIMO雷达三维空间目标参数估计算法摘要:采用非均匀线型发射阵列、非均匀L型接收阵列的新型MIMO雷达信号模型以及引入目标收发角和多普勒频率联合估计算法,对双基地MIMO雷达的各个参数进行了估值计算,该法旨在利用最小二乘算法得到计算对象的导向矩阵,来实现对导向矩阵简易化及降噪问题的处理,并通过Root-MUSIC算法对计算对象的三维收发角和多普勒频率的计算数值进行估计. 关键词:双基地MIMO雷达;最小二乘;导向矩阵0 引言多输入多输出雷达现今已引起社会广泛关注,其作为一种新型雷达开发技术,与之前雷达系统有明显差异,在其性能参数、雷达波形设计等方面,皆对传统技术造成了巨大冲击,引起了社会的高度关注[1]。
当今社会对于双基地相干MIMO雷达的研究已十分广泛,一些学者分别用不同的算法实现了对目标收发角的估计[2-5],一些学者利用多维ESPRIT、最大似然法、平行因子分析法等对多普勒频率进行估值计算[6-8],然而,上述研究是在二维平面中进行探讨的,对于三维空间中的目标收发角和多普勒频率的研究却不是很多,因此,本文将三维空间位置设定完成后,对L型双基地MIMO雷达进行探讨,基于平行因子下非均匀线型发射阵列和非均匀L型接受阵列对双基地MIMO雷达目标参数的估值计算进行研究。
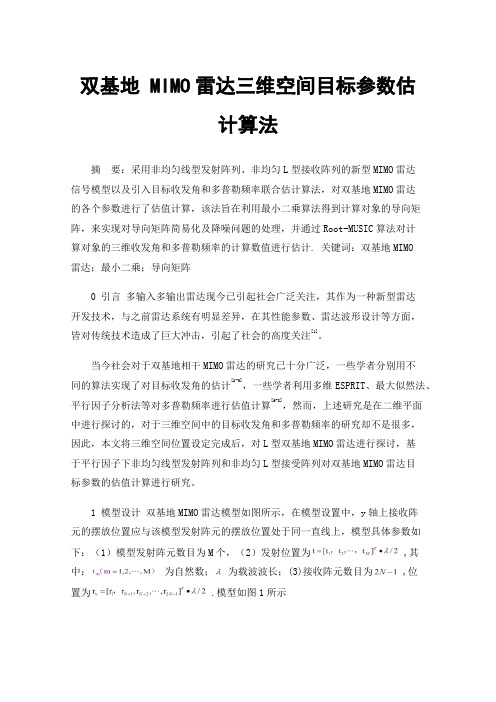
1 模型设计双基地MIMO雷达模型如图所示,在模型设置中,y轴上接收阵元的摆放位置应与该模型发射阵元的摆放位置处于同一直线上,模型具体参数如下:(1)模型发射阵元数目为M个,(2)发射位置为 ,其中:为自然数;为载波波长;(3)接收阵元数目为 ,位置为 .模型如图1所示图1 双基地MIMO雷达模型文本目标收发角以作为叙述,发射阵元同时发射一组相位编码信号,其矩阵形式表示为: ,其中为第m个发射信号,L为相位编码个数为*维单位矩阵设存在的点目标为p个,而这些点的收发角和多普勒频率在Q个脉冲周期的作用下仍能保持不变,则第q个内脉冲周期内所收到的回波信号可以表示为:,其中 , ,为噪声项。
双基地MIMO雷达目标参数估计及动态跟踪新算法

双基地MIMO雷达目标参数估计及动态跟踪新算法
李丽;邱天爽
【期刊名称】《信号处理》
【年(卷),期】2014(030)002
【摘要】民航地空通信受到无线电干扰会严重危机民航飞机的正常飞行.本文在深入研究地面干扰源定位问题的背景下,提出基于分数阶模糊函数的飞机动态跟踪算法.首先提出一个新的回波信号模型,通过搜索分数阶模糊函数的峰值点,实现了对多普勒频率的瞬时估计,并提出基于分数阶模糊函数的投影近似子空间角度跟踪算法(FAF-PAST),实现了2维发射角和2维接收角的联合动态递推估计.接下来根据阵列模型图中的几何关系,推导出了飞机的运动速度及三维位置坐标,从而实现飞机目标的动态跟踪,为后续地面干扰源定位打下良好的基础.仿真结果表明了该文提出的模型和算法的正确性和可行性.
【总页数】8页(P155-162)
【作者】李丽;邱天爽
【作者单位】大连理工大学电子信息与电气工程学部,辽宁大连116024;大连大学信息工程学院,辽宁大连116622;大连理工大学电子信息与电气工程学部,辽宁大连116024
【正文语种】中文
【中图分类】TN911.7
【相关文献】
1.一种双基地MIMO雷达目标参数估计算法 [J], 周围;杜晓雷;闫杰
2.基于旋转干涉仪圆阵化的多目标参数估计新算法 [J], 辛金龙;廖桂生;杨志伟;解虎
3.一种新的双基地MIMO雷达快速多目标定位算法 [J], 程院兵;顾红;苏卫民
4.基于分数低阶类相关熵的双基地MIMO雷达目标参数联合估计新算法 [J], 李丽;邱天爽;贺明妍
5.双基地MIMO雷达三维空间目标参数估计算法 [J], 李云成;崔琛;龚阳
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
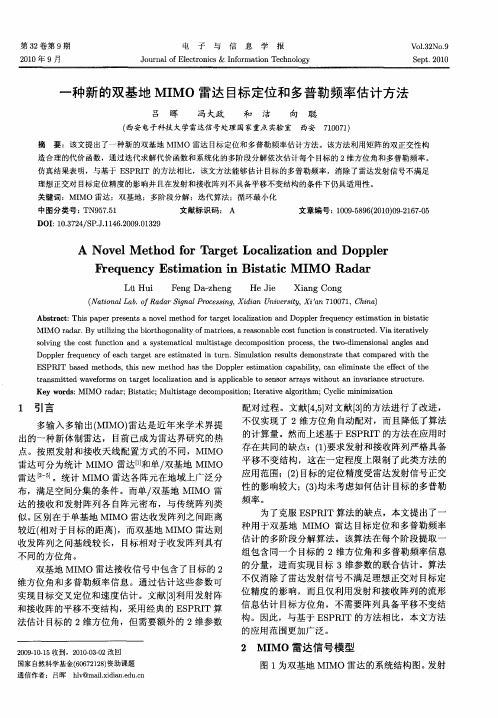
图 1 双基地 M IM O 雷达示意图
假设 M 个发射阵元发射相互正交的信号{ sm ( t) } m =1 , 即发射信号满足
∫
s
T
0
sk ( t) sl ( t -τ )dt =
*
1 , k = l , τ= 0 , 0 , 其他 ,
( 1)
* 式中 T s 表示发射信号宽度 , ( · ) 表示取共轭 . 则照射到目标的信号可以写成
at ( α , β) s( t) ,
T T tx T ty T
T
( 2)
其中( · ) 表示 矩阵 或向 量转置 ; a t( α , β) =[ a ( α ) , a ( β) ] 表 示发 射阵 列 导向 矢量 ; at x ( α )= [ 1, e xp( jπ co s α ) , … , exp( j( M x -1) π cos α ) ] T , 表示 X 轴上发射阵列导向矢量 ; Y 轴上发射阵列的导向矢量为 at y ( β )= [ 1 , exp( jπcos β) , … , ex p( j My π co s β ) ]T; s( t)= [ s1( t) , s2 ( t) , …, sM( t) ] T , 表示所有阵元的发 射信号构成的发射信号向量 , 其顺序与导向矢量中的发射阵元顺序相对应 . 忽略脉冲内的多普勒频率变化 , 则接收阵列的接收信号向量可以写成 x l( t)=ξ ar ( γ ) at ( α , β) s( t)exp( j2πf d l)+nl ( t) ,
2010 年 8 月 第 37 卷 第4期
西安电子科技大学学报( 自然科学版) JOUR NAL OF XIDI AN UNIV ER SI TY
A ug . 2010 V ol . 37 N o . 4
doi : 10 . 3969/ j. issn . 1001 -2400 . 2010 . 04 . 016
Target altitude measurement of bistatic MIMO radar using the virtual elements technique
J I N Ming , L I J un , L I AO Guisheng , L I Wei-ping
( K ey Lab . of Radar Sig nal Pr ocessing , Xidian Univ . , Xi an 710071 , China) Abstract: A tar get a ltitude measur ement me thod using the v ir tua l elements technique of bistatic multiple -input multiple -o utput (M IM O ) radars is propo sed . T he metho d carries out altitude mea surement by estimating the ang les o f targ ets w ith respect to the transmitting and r eceiv ing ar ray s . Different fro m the co nv entional altitude mea surement method of bistatic rada rs , the pro po sed method requires neither time sy nchro niza tion no r communicatio n be tw een tr ansmitting and receiving ends . Hence , the pro po sal simplifies the config uratio n o f the sy stem .In addition , the ang les can be paired auto matically when multiple tar gets ex ist , and then targe t g ho sts are avoided . Finally , compute r simulatio ns validate the pr oposed method . Key Words : multiple -input multiple -output radar ; bistatic radar ; altitude measurement ; vir tual elements technique
P
x l( t)=
i =1
∑
ξ i a r( γ i) at ( α s( t) exp( j2πf di l) +nl ( t) , i , βi )
T
( 4)
式中的下标 i 表示目标序号 . 对接收信号进行脉压( 即分离各发射阵元的回波信号) 后的信号为
第 4 期 金 明等 : 测量 目标高度的双基地 M IM O 雷达虚拟阵元技术
1/ 2 L =( x + y ) . 笔者通过在接收机端测量目标的角度 α , β 和 γ来估 2 2
计目标的高度 H ( 即图中 Z 轴坐标) . 假设发射端在 X 轴和Y 轴上的阵 元数分别为 M x 和 M y , 是等距线阵 , 令 M = Mx + My . 接收端为 N 阵 元的等距线阵 . 为简单起见 , 假设所有线阵相邻阵元间距为半波长 .
T 2 T
( 3)
其中 , ar ( γ )=[ 1 , exp( jπsi n γ ) , … , ex p( j( N -1) π sin γ ) ] , 表示接收阵列导向矢量 ; ξ 表示目标反射信 号复幅度 ; nl ( t)表示接收机白噪声 , 假设各阵元噪声互不相关且功率均为 σ f d , 表示目标多普勒频率 ; l n ; 表示慢时间序号 , 即脉冲数序号 . 在同一距离环上有 P 个目标的情况下 , 接收信号可以表示为( 这里假设噪 声和信号不相关)
对非合作目标的高度进行测量具有重要的军事应用价值[ 1] . 众所周知 , 在雷达中目标的高度是一个导出 量而不是直接测量出来的值[ 1] . 单基地雷达从目标的距离和仰角坐标测量值推导出目标的高度 . 双基地雷达 具有较好的“ 四抗” 能力和反侦察能力 , 已经引起了人们的关注[ 2] . 传统的双基地雷达能够通过测量目标相对 于接收机和发射机的角度以及发射机-目标-接收机的距离和来计算目标的高度 , 但是这些方法需要时间和 波束同步 . 通过时间同步 , 可以获得发射机-目标-接收机的距离和 . 通过波束同步 , 可以使接收机和发射机波 束同时覆盖目标所在的区域 . 另外 , 由于传统的双基地雷达要在发射端和接收端分别测量目标相对于发射机 和接收机的角度 , 这就需要额外的通信设备传送这些测量值 . 多输入多输出( Mult iple-Input M ultiple-Output , 缩写 MIM O) 雷达是近几年提出的雷达新概念
[ 11]
.
1 系统布阵和信号模型
双基地 MIM O 雷达的发射端和接收端处于同一水平面 ( XOY ) 上. 发射端处于坐标原点 , 由与 X 轴和 Y 轴重合的两个线阵组成 . 假设所有发射阵元只向 X 轴大于 0 的区域以宽波束发射正交信号 , 即发射阵元具有 一定的方向性 . 文献[ 6-7] 已经证明 , 虽然宽波束发射使得发射信号能量分散 , 但是宽波束发射可以增加目 标照射时间 , 最后接收到的目标信号能量是没有损失的 . 假设接收端放于一个移动平台上 , 由一个垂直的线 阵构成 . 平台的坐标为( x , y) , 并且接收端通过其他手段( 比如导航卫星等 ) 获得这个坐标 , 也就是说平台坐 标对接收端来说是已知的 . 当存在一个目标时系统参数( 包括布阵结 构) 如图 1 所示 . 目标相对于发射阵 X 轴向阵列的锥角为 α , 相对于发 射阵 Y 轴向阵列的锥角为 β ; 目标相对于接收阵的侧面角为 γ . 发射阵 和接收阵的距离( 基线) 为L. 由于发射端处于坐标原点不动 , 所以有
测量目标高度的双基地 MIMO
( 西安电子科技大学 雷达信号处理重点实验室 , 陕西 西安 710071) 摘要 :提 出了一种通过双基地多输入多输出雷达虚拟阵 元技术 进行目标 高度测 量的方 法 . 该 方法在 接 收端估计 目标相对于发射阵列和接收阵列的角度 , 然后利用获 得的角度进行目标高度测量 . 与传统 的双 基地雷达 测高方法不同 , 该方法既不需要发射端和接收端之间 的时间同步 , 也不需要在收 发两端之 间传 输数据 , 从而简化了系统的配置 . 另外 , 在多目标情况 下 , 该方法 估计的角 度能够 自动配 对 , 从 而避免 了 目标模糊 . 关键词 :多输入多输出雷达 ; 双基地雷达 ;高度测量 ; 虚拟阵元技术 中图分类号 : T N911 . 7 文献标识码 : A 文章编号 : 1001 -2400( 2010) 04-0671-05
[ 3-9]
. 文
献[ 4-5] 分析了双基地雷达目标定位性能 , 利用各发射阵元发射相互正交的信号 , 在接收端通过匹配滤波的 方法分离各发射信号的目标回波 , MIMO 雷达能够提高目标角度估计性能 , 获得孔径扩展等优点[ 6-8] . 文献
收稿日期 : 2009-06 -01 基金项目 : 国家自然科学基金资助项目( 60736009 , 60825104) ; 广西信息与通讯技术重点实验室资助项目 作者简介 : 金 明( 1981 -) , 男 , 西安电子科技大学博士研究生 , E - mai l : mi ngjin141 @gmail . com .
西 安电子科技大学学报( 自然科学版) 第 37 卷 672
[ 9-10] 提出了不同准则下的发射信号设计方法 . 笔者提出了一种利用双基地 M IM O 雷达虚拟阵元技术进行目标高度测量的方法 . 该方法在接收端同时 估计目标相对于发射机和接收机的角度 , 然后利用这些角度推导出目标的高度 . 与传统的双基地雷达相比 , 笔者所提方法具有以下的特点 : ( 1)所有角度是在接收端估计的 , 所以不需要接收机和发射机之间的额外 通信 ; ( 2)不需要估计发射机-目标-接收机的距离和 , 所以不需要时间同步 ; ( 3)同一距离单元存在多个目 标时 , 所有估计的角度能够自动配对 , 从而可以避免目标出现模糊 . 在这种情况下 , 传统的双基地雷达由于在 双基地分别测量目标角度 , 所以需要额外的角度配对处理 , 如果处理不当 , 则会出现错误估计或者目标模糊 ; ( 4)由于在接收机端能够估计出目标相对于发射机的参数 , 所以该体制雷达系统适用于发射机平台位置固 定、 接收机平台移动的情况 . 由于移动平台大小的限制 , 笔者所提雷达体制的载波采用微波波段