机械制图第二章投影法的基本知识及三视图
合集下载
《汽车机械制图》教学课件项目二投影作图基础和轴测图

点A的X坐标等于点A到W面的距离Aa″=aaY=a′aZ; 点A的Y坐标等于A到V面的距离A a′=aaX= a″aZ;A点的Z 坐标等于A到H面的距离Aa=a′aX=a″aY。也就是说,若已 知点的坐标(x,y,z),就能唯一确定该点的空间位置,准确 地画出点的三面投影图。
例2已知点A(30,20,25),画出点的三面投影。 作图:①在OX轴上量取OaX=30mm,得aX,如图2-11(a) 所示;②过aX作OX轴的垂线,自aX沿OY方向量取20mm,沿 OZ方向量取25mm,分别得a和a′,如图2-11(b)所示;③ 根据a、a′求出a″,如图2-11(c)所示。
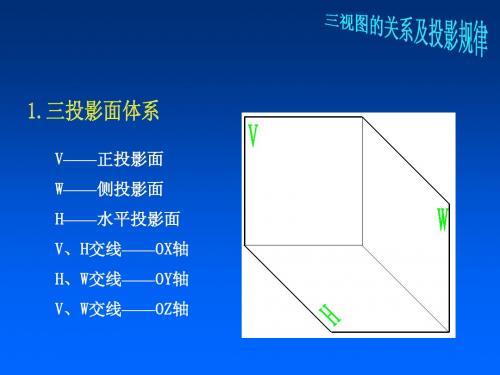
(3)三投影面体系的展开。在实际作图中,为了画图方便,需 要将三个投影面在一个平面(纸面)上表示出来,规定:使V面不动 ,H面绕OX轴向下旋转90°与V面重合,W面绕OZ轴向右旋转90° 与V面重合,这样就得到了在同一平面上的三视图,如图2-6(b)所示
。可以看出,俯视图在主视图的下方,左视图在主视图的右方。在 这里应特别注意的是:同一条OY轴旋转后出现了两个位置,因为 OY是H面和W面的交线,也就是两投影面的共有线,所以OY轴随着 H面旋转到OYH的位置,同时又随着W面旋转到OYW的位置。为了 作图简便,投影图中不必画出投影面的边框,如图2-6(c)所示。由于
(1)一般位置平面的投影特性。与三个投影面都倾斜 的平面称为一般位置平面。如图2-21所示,△ABC是一般 位置平面。由于△ABC倾斜于V、H、W面,因此三面投 影都具有类似性。用迹线表示时,各迹线都与相应的投影 轴相交,如图2-21所示。一般位置平面的投影特性:三面 投影均为空间图形的类似形,面积缩小,且均不能直接反 映平面对投影面的倾角。
然后将物体对各个投影面进行投影,得到三个视图,这样才能把物 体的长、宽、高三个方向,上下、左右、前后六个方位的形状表达 出来。三个视图分别为:
机械制图第二章

机械制图-第二章
PPT文档演模板
2020/11/18
机械制图第二章
§2-1 投影法概述
一、投影法分类 二、正投影法基本性质
PPT文档演模板
机械制图第二章
一、投影法分类
1.中心投影法
中心投影法——投射线汇交于投射中心的投影方法。
2.平行投影法
平行投影法——投射线互相平行的投影方法。
斜投影法
PPT文档演模板
(2)点S的V面投影和W面投 影的连线垂直于OZ轴,即 s's''⊥OZ。
(3)点S的H面投影到OX轴 的距离等于其W面投影至OZ轴的 距离,即ssX=s''sZ。
PPT文档演模板
机械制图第二章
【例2-4】已知点A的V面投影a'和W面投影a'', 求作H面投影a。
解题步骤
PPT文档演模板
机械制图第二章
机械制图第二章
一、三投影面体系的建立
主视图 俯视图 左视图
PPT文档演模板
三视图的形成
图2-6 三视图的展开
机械制图第二章
二、三视图的投影对应关系
PPT文档演模板
长对正、高平齐、宽相等
机械制图第二章
三、三视图与物体的方位对应关系
PPT文档演模板
机械制图第二章
【例2-1】根据长方体(缺角)的立体图和主、 俯视图,补画左视图,并分析长方体表面间的相对 位置。
【例2-3】根据如图所示弯板立体图,绘制其三 视图。
解题步骤
PPT文档演模板
机械制图第二章
§2-4 点、直线、平面的投影
一、点的投影分析 二、直线的投影分析 三、平面的投影分析
PPT文档演模板
PPT文档演模板
2020/11/18
机械制图第二章
§2-1 投影法概述
一、投影法分类 二、正投影法基本性质
PPT文档演模板
机械制图第二章
一、投影法分类
1.中心投影法
中心投影法——投射线汇交于投射中心的投影方法。
2.平行投影法
平行投影法——投射线互相平行的投影方法。
斜投影法
PPT文档演模板
(2)点S的V面投影和W面投 影的连线垂直于OZ轴,即 s's''⊥OZ。
(3)点S的H面投影到OX轴 的距离等于其W面投影至OZ轴的 距离,即ssX=s''sZ。
PPT文档演模板
机械制图第二章
【例2-4】已知点A的V面投影a'和W面投影a'', 求作H面投影a。
解题步骤
PPT文档演模板
机械制图第二章
机械制图第二章
一、三投影面体系的建立
主视图 俯视图 左视图
PPT文档演模板
三视图的形成
图2-6 三视图的展开
机械制图第二章
二、三视图的投影对应关系
PPT文档演模板
长对正、高平齐、宽相等
机械制图第二章
三、三视图与物体的方位对应关系
PPT文档演模板
机械制图第二章
【例2-1】根据长方体(缺角)的立体图和主、 俯视图,补画左视图,并分析长方体表面间的相对 位置。
【例2-3】根据如图所示弯板立体图,绘制其三 视图。
解题步骤
PPT文档演模板
机械制图第二章
§2-4 点、直线、平面的投影
一、点的投影分析 二、直线的投影分析 三、平面的投影分析
PPT文档演模板
机械制图全套教案 第2章 投影基本知识
---投影面平行线
水平线
投影特性:
1.直线在所平行的投影 面上的投影反映实长和 对另两个投影面的真实 倾角。 2.直线的另两个投影分 别平行于相应的投影轴, 且均小于实长。
---投影面平行线
正平线 侧平线
---投影面垂直线
投影特点:
1.投影面垂直线在所 垂直的面上的投影积 聚为一点; 2.在另外两个投影 面上的投影,共平行 于一个投影轴,且反 映实长。
面投影均积聚为平行于相应投影轴的直线段,
且直线段长度等于顶圆和底圆的直径。
投影特点:一个视图为圆,另两个为矩形。
圆柱表面上取点:
当圆柱轴线处于垂直线位
置时,其圆柱面在轴线所
垂直的投影面上的投影有 积聚性,其顶圆、底圆平
面的另两个投影有积聚性。
例如,在图中,已知点M 的正面投影m′、点N的侧
面投影n″和点K的水平投
棱柱投影分析和画法:
由于正六棱柱的顶面和底面为水平面,所以 其水平投影重合为反映实形的正六边形,正面投
影和侧面投影分别积聚为平行于相应投影轴的水
平直线段;前、后两个侧棱面为正平面,其正面 投影反映实形且重合,水平投影和侧面投影分别
积聚为平行于相应投影轴的水平直线段和铅垂直
线段;其余侧棱面都为铅垂面,它们的水平投影 分别积聚成斜线段并重合在正六边形的边上,正 面投影和侧面投影均为类似形(矩形)。
棱柱表面取点:面上取点的原理和方法相同。
取点的原理和方法与在平
棱锥
棱锥由几个三角形的 侧棱面和一个多边形 的底面围成。各侧棱 面为共顶点的三角形。
棱锥投影分析和画法:
因为底面△ABC为水平面,故其水平投影 △abc反映实形,正面投影和侧面投影均积聚 为水平线段。棱面△SAB和△SBC为一般位置 平面,三面投影均为缩小的类似三角形。因 该两棱面左、右对称,故侧面投影重合。棱 面△SAC为侧垂面,所以侧面投影s″a″c″积聚 为斜线段,水平投影和侧面投影为缩小的类
机械制图第2章正投影基础

为比原形状小的类似形。
E
L K
F
M
α
f
e
H
在该面上的投影长度 变短,ef=EFcosα。
l k
m H
在该面上的投影 △klm面积变小。
2.2 三视图的形成及其投影关系
2.2.1 视图的基本概念 2.2.2 三视图的形成 2.2.3 三视图之间的关系 2.2.4 三视图的作图方法与步骤
2.2.1 视图的基本概念
(3)投影面垂直线
投影面垂直线 投影特性:
正垂线 ——与V面垂直的直线
铅垂线 ——与H面垂直的直线
侧垂线 ——与W面垂直的直线
① 在垂直的投影面上的投影,积聚成一点。
② 在另外两个投影面上的投影,平行于投影轴 (与直线相平行的投影轴),且反映实长。
(3)投影面垂直线
正垂线
投影特性: ① a’b’积聚成一点。
(1)两点相对位置的确定
例2-3 如图所示,试判断点B相对于点A的空间位置 。
yA
yB
zB
zA
xA
xB
X坐标值确定两点的左右位置 大者为左,小者为右;XA<XB Y坐标值确定两点的前后位置
大者为前,小者为后;YA<YB
Z坐标值确定两点的上下位置 大者为上,小者为下;ZA>ZB 结论:
B 点在A点的左、前、下方。
直线按与投影面的相对位置不同分为三类: 一般位置直线
不平行于任一投影面的直线。
投影面平行线
与 的一 直个 线投 。影面平行,与特另殊二位个投置影直面线倾斜
投影面垂直线
与一个投影面垂直,与另二个投影面平行 的直线。
直线与H面、V面、W面的倾角,分 别用α、β、γ表示
机械制图 第二章

如图所示,已知棱柱侧面 abb0a0上点M的正面投影m′, 求作另两个投影. 解 由于点M所属侧面 aba0b0为铅垂面,因此,点 M的水平投影必在该侧面的 积聚性投影a(a0)b(b0) 直线段上,由点m′求得点m, 由点m,m′求得点m〃(见 箭头所指)
2.棱锥 棱锥由一个底面和几个侧面所围成.棱锥侧面彼此 相交的交线,称为棱线;棱线汇交于一点,此点称为 锥顶. (1)棱锥的形体特征 棱锥的底面为多边形(特征面),各侧面为若干个 具有公共顶点的三角形,从棱锥顶点到底面距离为棱 锥的高,正棱锥的底面为正多边形. (2)棱锥三视图的特点 在与底面平行的投影面上,投影外形线框为多边形, 反映底面实形,内形线框由数个有公共顶点的三角形 组成,这个视图称为特征视图;另两个投影由单个或 多个由虚,实线且具有公共顶点的三角形组成,称为 一般视图.
第二章 机械制图的投影基础
第一节 正投影法和三视图的基本概念
一,投影法的概念及正投影的基本性质 1.投影法的概念 物体在太阳光或灯光的照射下,在地面或墙壁上就会有影子出现,这就是投影的 现象,投影法就是基于以上现象提出的. 2.投影法的分类 按投影线平行与否,投影法可分为中心投影法和平行投影法. (1)中心投影法.投影线汇交于一点(投影中心)的投影方法,称为中心投影 法. (2)平行投影法.当投射中心距离投影平面无限远时,投影线近似平行,这时 的投影方法称为平行投影法.平行投影法根据其投影线与投影平面垂直与否可分 为斜投影法和正投影法.投影线互相平行,且投影线与投影平面斜交的投影方法, 称为斜投影法;投影线互相平行,且投影线与投影平面垂直的投影方法,称为正 投影法. 3.正投影的基本性质 (1)真实性.当直线或平面与投影面平行时,直线的投影反映了直线的真实长度, 平面的投影反映了平面的真实形状,这种性质称为真实性. (2)积聚性.当直线或平面与投影面垂直时,直线在投影面上的投影汇聚为一 个点,平面在投影面上的投影汇聚为一条直线,这种性质称为积聚性. (3)相似性.当直线或平面与投影面斜交时,直线的投影仍为直线,但投影的 长度变短,平面的投影为与原平面相似的平面图形,但投影面积变小,这种性质 称为相似性.
机械制图第二章投影基础
正投影法
画工程图样 及正轴测图
机械制图多媒体课件
第二章 投影基础
1.中心投影法
投射中心 投射线 物体 投影 投影面 物体位置改变, 投影大小也改变
投影特性
投射中心、物体、投影面三者之间的相对距离 对投影的大小有影响 度量性较差
机械制图多媒体课件
第二章 投影基础
2.平行投影法
投影特性
投影大小与物体和投影面之间的距离无关 度量性较好
第二章 投影基础
四、三视图的画法
◆画对称中心线和基准线
◆画底板 ◆画立板
◆画肋板 ◆画圆形缺口
机械制图多媒体课件
第二章 投影基础
第三节 点、直线、平面的投影
一、点的投影 二、直线的投影 三、平面的投影
机械制图多媒体课件
第二章 投影基础
一、点的投影
1. 点的投影规律 a a a 点A的正面投影 点A的水平投影 点A的侧面投影
向下翻90°
三、三视图之间的对应关系
位置关系
◆俯视图在主视图的下方 ◆左视图在主视图的右方
投影关系
◆主、俯长对正 ◆主、左高平齐 ◆俯、左宽相等
三 等 规 律
方位关系
◆主视图反映左、右和上、下 ◆俯视图反映左、右和前、后 ◆左视图反映上、下和前、后
机械制图多媒体课件
俯、左视图远离主视图的一边, 表示物体的前面;靠近主视图的一 边,表示物体的后面
机械制图多媒体课件
第二章 投影基础
基本几何体的类型
常见的基本几何体 平面立体 回转体
机械制图多媒体课件
第二章 投影基础
一、棱柱
棱柱由两个底面和几个侧棱面组成。侧棱
面与侧棱面的交线叫侧棱线,侧棱线相互平行
机械制图-投影原理

D
37
结束 返回
直线的投影 2.4.4 两直线的相对位置
2.4.1 直线对一个投
两直线平行
影面的投影特
性
2.4.2
b' d'
b"
直线在三投影
面体系中的投 影特性
2.4.3
a' c'
c" a"
属于直线的点
2.4.4
c
d
两直线的相对
位置
b
平行 相交 交叉(垂直)
AB // CD?
c' b' d' a
d b
d" b"
投影特性
同面投影平行 a'b'//c'd' ab//cd
且长度成比例
38
结束 返回
直线的投影
2.4.1 直线对一个投 影面的投影特 性 2.4.2 直线在三投影 面体系中的投 影特性
2.4.3 属于直线的点
2.4.4 两直线的相对 位置
两直线相交
交点为共有点
b'
d'
k'
a'
c'
a c
kd b
ABCD?
V
b'
c'
2'(1')
a'
Ⅰ
CA
Ⅳ
B
d'
Ⅱ
Ⅲ
D
a
d
c
4(3) b
c' a'
b'
2’(1’) 4’
3’
d'
a
1
d
c
4(3)
机械制图第2章
第 2 章 正投影法基本原理 2.1.2 正投影的投影特性 (1) 真实性。平面图形(或直线)与投影面平行时, 其投影 反映实形(或实长)的性质称为真实性, 如图2-6所示。源自第 2 章 正投影法基本原理
图 2-6 正投影法的真实性
第 2 章 正投影法基本原理 (2) 积聚性。平面图形(或直线)与投影面垂直时, 其投影 积聚为一条直线(或一个点)的性质称为积聚性, 如图2-7所示。 (3) 类似性。平面图形(或直线)与投影面倾斜时, 其投影 变小(或变短), 但投影的形状与原来形状相类似的性质称为类 似性, 如图2-8所示。
第 2 章 正投影法基本原理 (2) 点的投影到投影轴的距离等于空间点到对应投影面的 距离, 即:
a′ax=a″ay=A点到H面的距离Aa;
aax=a″az =A点到V面的距离Aa′; aay=a′az =A点到W面的距离Aa″。
第 2 章 正投影法基本原理 2.2.2 点的投影与直角坐标的关系 点的空间位置可用直角坐标来表示,即把投影面当作坐标
第 2 章 正投影法基本原理
图 2-3 中心投影法
第 2 章 正投影法基本原理
图 2-4 采用中心投影法绘制的图样
第 2 章 正投影法基本原理 2. 平行投影法 若将图2-3中的投射中心 S移至无限远处,则投射线都相互
平行,如图2-5所示。这种投射线相互平行的投影法称为平行投
影法。 平行投影法按投射线是否垂直于投影面, 又可分为斜投影 法和正投影法。 (1) 斜投影法: 投射线与投影面相倾斜的平行投影法。
第 2 章 正投影法基本原理
图 2-16 点的直角坐标
第 2 章 正投影法基本原理 可见, 空间点的位置可由点的坐标(x,y,z)确定,点的空间位 置、点的投影与其坐标值是一一对应的。因此,我们可以直接 从点的三面投影图中量得该点的坐标值。反之,根据所给定的 点的坐标值, 可按点的投影规律画出其三面投影图。
第二章 投影法和三视图

图2-15
答案
(三)、课堂总结:
1.三视图的“三等“关系(长对正、高平齐、宽相等)
2.基本体的三视图画法和基本体表面上取点的方法: 棱柱、圆柱:积聚性。 棱锥:辅助线。 圆锥:辅助线或辅助圆。 球:辅助圆。
第二节 投影法基础——截交线、相贯线 课堂探析
(一)探析问题
问题一: 如图2-29,根据三视图画 (考点:正等轴测图
(考点:点、线、面的投影)
【解题思路】 ①.掌握点、线、面的投影特性。 ②.掌握点、线、面的投影规律。 ③.根据点、线、面的投影规律,由已知 的两面投影求第三面投影。
图2-10 【解题过程】 ①.找出组成平面的各段直线(由分析知该铅垂 面为6边形组成); ②.找出组成各直线的两点(6个点); ③.根据点的投影规律,由点的两面投影求第三 面投影; ④.将相应两点用直线连接起来。
表面上取点的方法。 4.截交线、相贯线的投影画法。 5.相贯线的简化画法。
2016年
2017年
2018年
1.截交线的画法
(选择题)
截交线、相贯线的画法
投影法基础
2.补画相贯线、截交线 (作图题)
(作图题)
(填空题、作图题)
(三)课堂探析
第一节
投影法基础-----点、线、面的投影及投影方法
(一)问题探析 问题一 如图2-10,求铅垂面的W面投影。
答案
问题三 如图2-13,已知三棱锥表面上直线HM、MN的正面投影 h’m’、m’n’,试求其水平投影和侧面投影。
(考点:棱锥表面上点、线的投影)
【解题思路】
①.会分析三棱锥的三视图。
②.掌握点、线、面的投影规律。
图2-13
③.掌握点、线投影可见性的判别。 ④.利用辅助线法求棱锥表面上点的投影。
《机械制图》第二章 正投影法基础

应用定比定理
例题3 V b
已知点C 在线段AB上,求点C 的正面投影。 b c X O a b c b a cb ac
c
a X B C
A
a
c
H
二、两直线的相对位置
平行 相交
平行
相交 垂直相交
交叉
空间两直线的相对位置分为: 平行、相交、交叉。 投影特性: ⒈ 两直线平行
b
a A a b B c C c d H D d V
b
投影特性:
三个投影都缩短。 即: 都不反映空间线段 的实长及与三个投影面 夹角的实际大小,且与 三根投影轴都倾斜。
2.4 直线与点及两直线的相对位置
一、直线与点的相对位置
点在直线上的判别方法:
◆ 若点在直线上, 则 点的投影必在直线的同 名投影上。并将线段的 同名投影分割成与空间 相同的比例。即: ◆若点的投影有一个不 在直线的同名投影上, 则 该点必不在此直线上。
空间两直线平 行,则其各同名投 影必相互平行,反 之亦然。
例1:判断图中两条直线是否平行。
①
a
b d c c b d
a
对于一般位置直 线,只要有两个同名 投影互相平行,空间 两直线就平行。
AB//CD
例2:判断图中两条直线是否平行。
②
c c
a
d
a b d
b c
b d a 如何判断?
各种位置点的投影 空间点 点的X、Y、Z三个坐标均不为零,其 三个投影都不在投影轴上。 投影面上的点 点的某一个坐标为零,其一个 投影与投影面重合,另外两个投影分别在投影 轴上。 投影轴上的点 点的两个坐标为零,其两个投 影与所在投影轴重合,另一个投影在原点上。 与原点重合的点 点的三个坐标为零,三个投 影都与原点重合。
机械制图第二章正投影的基本知识
•在其垂直的投影面上的投影积聚成与该投影面内 的两根投影轴倾斜的直线; •另外两个投影面上的投影为空间平面的类似形。
a′
a″
b′
c′ b″ a′
x
c′ c″
x
c
a
a
b c
b′ b″ a″
b
c′ c″ a′
x c
a
c″
b′
b″
a″
b
图2-37 投影面整垂理直pp面t 的投影特性
43
⑶一般位置平面
图2-38 一般位置平面的投影特性
1.平行
图2-28整两理直p线pt 的平行
33
[例2-3] 判断两直线是否平行?
图2-29 判断两直线是否平行
结论:两直线不平行
整理ppt
34
2.相交
图2-30 两直线相交
整理ppt
35
[例2-4] 判断两直线是否相交?
图2-31 判断两直线是否相交
结论:两直线不相交。 整理ppt
36
3.交叉
整理ppt
30
[例2-1]已知直线CD的正面投影和水平投影和K点的水平投影
,求K点的正面投影。
解:分析:CD为侧平线,K在直线上,必在直线AB的同面投影上,
作图:
c′
c′
l1
l2 k1
d′
X
d
k
k′
d′
O
X
d
k
d1
O
l2
l1
c
c
图2-26整求理直pp线t 上点的投影
31
[例2-2] 已知直线AB和M点的正面投影和水平投影,问
第二章 正投影的基础知识
本章教学目标要求: 1.熟悉投影法的基本知识及三视图的对应关系。 2.掌握点的投影及投影规律 3.掌握线、面的投影特性。 本章重点难点:
a′
a″
b′
c′ b″ a′
x
c′ c″
x
c
a
a
b c
b′ b″ a″
b
c′ c″ a′
x c
a
c″
b′
b″
a″
b
图2-37 投影面整垂理直pp面t 的投影特性
43
⑶一般位置平面
图2-38 一般位置平面的投影特性
1.平行
图2-28整两理直p线pt 的平行
33
[例2-3] 判断两直线是否平行?
图2-29 判断两直线是否平行
结论:两直线不平行
整理ppt
34
2.相交
图2-30 两直线相交
整理ppt
35
[例2-4] 判断两直线是否相交?
图2-31 判断两直线是否相交
结论:两直线不相交。 整理ppt
36
3.交叉
整理ppt
30
[例2-1]已知直线CD的正面投影和水平投影和K点的水平投影
,求K点的正面投影。
解:分析:CD为侧平线,K在直线上,必在直线AB的同面投影上,
作图:
c′
c′
l1
l2 k1
d′
X
d
k
k′
d′
O
X
d
k
d1
O
l2
l1
c
c
图2-26整求理直pp线t 上点的投影
31
[例2-2] 已知直线AB和M点的正面投影和水平投影,问
第二章 正投影的基础知识
本章教学目标要求: 1.熟悉投影法的基本知识及三视图的对应关系。 2.掌握点的投影及投影规律 3.掌握线、面的投影特性。 本章重点难点:
机械制图投影基础ppt课件

V
Z
W
(主 视 图 )
(左 视 图 )
X
0
YW
(俯 视 图 )
H
YH
展开后的三视图
三视图
应使物体的多数表面(或主要表面)平行或垂直于投影面
(即形体正放)。
位置一经确定,在投影过程中不能移动或变更。
编辑版pppt
20
俯视(H面投影)
三视图位置
主 视 图 (V面 ) 左 视 图 (W面 )
左视(W面投影)
平行投影法
单面投影
正投影法
多面投影
画工程图样
编辑版pppt
3
1.中心投影法
投射线从投影中心发出
投射中心
投射线
投影体
A
C
B
a
c
b 投影面
投影
A
C
B
物体位置改变, 投影大小也改变
a
c
b 投影面
投影特性
•中心投影法得到的投影一般不反映形体的真
实大小。
•度量性较差,作图复杂。
编辑版pppt
4
中心投影应用—编辑电版pp冰pt 箱两点透视图 5
编辑版pppt
44
1、投影面平行线(水平线、正平线、侧平线)
a′ b′
Z a″ b″
X
O
YW
a
b
水平线的投影特征:
YH
1. H面投影反映实长。即:ab=AB;
2. V、W面投影分别平行于H面的两根轴。
3正. 平即线a′和b′∥侧OX平轴,线a″可b″∥得OY出W轴类;似的投影特征
3. H面投影与OX轴夹角反映直线对V面的倾角β;
正上(下)方
●X、Z分别相等,V面重影(V面投射线上),Y大可见。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、正投影的基本性质
1.实形性
A
E
BC
当空间直线或平面平行于投影面时,
其投影反映直线的实长或平D面的实形, 这种a投影性质称为实形性。
b c
H
e d
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
三、正投影的基本性质
2.积聚性
A
E
C
其投当影直积线聚B或为平一面点垂或直一D于条投直影线面,时这,
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图 §2-1 投影法的基本知识
教学内容 一、投影法的概念 二、投影法的分类 三、正投影法的基本性质
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图 §2-1 投影法的基本知识
教学目标 1.了解投影法的基本概念和分类, 2.2.掌握正投影的基本性质。
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
二、投影法的分类
画透视图
画斜轴测图
中心投影法 投影方法
平行投影法
斜投影法 正投影法
画标高图 及正轴测图
单面投影
多面投影
画工程图样
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
1.中心投影法
投射中心
1.中心投影法
投射线均从一点发出的投影法称为中心投影法。 发出投射线的点即是投射中心。
中心投影法的投影特性:
⑴ 立体感强 —— 在建筑 设计领域通常用中心投影法绘 制建筑物的透视图。
⑵ 度量性差 —— 投影的 大小随着物体位置的改变而变 化,且作图复杂. 机械专业一般不用此方法绘图。
常德职业技术学院机械制图课程组
投射线
投影体
A
C
B
a
c
b 投影面
投影
A
C
B
物体位置改变, 投影大小也改变
a
c
b 投影面
思考: 1) 在中心投影下,投影能否反映物体的真实大小? 2 )当物体沿投影面的法线方向移动时,其投影大小变不变? 3 )中心投影能否满足绘制工程图样的要求?
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
§2-1 投影法的基本知识
一、投影法的概念
日常生活中,当光线照射物体就会在地面上产生影子,这 就是投影现象。 实现投影的三个要素: 1.光线 —— 制图上称为投射线 2.承影面 —— 制图上称为投影面 3.物体
投影法:投射线经过物体向投影 面投射,在该面上得到图形的方 法。
机械制图—第二章投影法的基本知识及三视图
2.平行投影法
投射线垂直 于投影面
投射线倾斜 于投影面
投影体 A
C
B
A
C
B
投影体
正投影
a
cb 投影面a b Nhomakorabeac
投影面
斜投影
正投影法 投射线互相平行且垂直于投影面
斜投影法 投射线互相平行且倾斜于投影面
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
机械制图—第二章投影法的基本知识及三视图
三、正投影的基本性质
归纳正投影的三个特性如下: 1.当几何要素与投影面平行时——其投影表现出真实性 2.当几何要素与投影面垂直时——其投影表现出积聚性 3.当几何要素与投影面倾斜时——其投影表现出类似性
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
§2-2 三视图的形成及投影规律
一、三视图的形成
单一正投影不能完全确定物体的形状和大小
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
一、三视图的形成
2.平行投影法
思考:
1)沿投影方向移动物体,其正投影的大小变不变? 2)物体的投影有否可能反映某一个面的实形? 3)正投影能否满足绘制工程图样的要求? 平行投影的投影特性: 1)投影大小与物体和投影面之间的距离无关。 2)度量性较好
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
种投影性质称为积聚性。
c
a(b) d
H
e
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
三、正投影的基本性质
3.类似性
A
E
C
时,当其空投间影直仍线B为或直平线面或倾与斜之于D 类投似影的面
平面图形,其投影的长度变短或面
积变a小,这种投影性质称为d 类似性。 bc
H
e
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
§2-1 投影法的基本知识 §2-2 三视图的形成及投影规律 §2-3 点的投影 §2-4 直线的投影 §2-5 平面的投影法的基本知识
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
§2-1 投影法的基本知识
投影法是绘制工程图的基本方法,理解投影的概念, 掌握正投影的思维方法是学好《机械制图》的前提。 三视图是采用正投影方法 绘制的,用以表达物体的 形状。初学者应注意掌握 三视图的形成方法以及三 视图的投影规律,空间想 象力的建立就从这儿开始。
§2-2 三视图的形成及投影规律 教学内容 一、三视图的形成 二、三视图的投影规律
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
§2-2 三视图的形成及投影规律
知识目标 1.了解三视图的形成, 2.2.掌握三视图的投影规律。 能力目。标
空间能力的建立 素质目标 培养学生观察生活体验生活,从生活中、 自然中发现规律,总结经验
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图
一、投影法的概念
需要说明的是:
工程上应用的投影法虽然来源于生活,但经过科学的 总结和抽象后与生活中的现象有着本质的区别。
生活中的影子
按投影法画出的投影图 从图中可以领会到: 画物体的投影图实质
上就是按照投影的方法画 出物体上所有的轮廓线, 可见的画成粗实线,不可 见的轮廓线用虚线绘制。
2.平行投影法 斜投影法在机械工程方面用于绘制立体图,工程图样多数 采用正投影法绘制。以后不作特殊说明,“投影”即指 “正投影”。
需要说明的是: 正投影法是一种思维方法,学习时要充分发挥想象力,在 脑海中建立起这种平行的并与投影面垂直的虚拟投射线。
目录
常德职业技术学院机械制图课程组
机械制图—第二章投影法的基本知识及三视图