matlab计算有限元程序 (2)
matlab有限元常用函数
matlab有限元常用函数Matlab是一种功能强大的数值计算软件,广泛应用于工程、科学和数学领域。
它提供了丰富的数学函数和工具箱,使得有限元分析成为可能。
在本文中,我们将介绍一些常用于有限元分析的Matlab函数,并逐步解释它们的用法和作用。
有限元分析(Finite Element Analysis,简称FEA)是一种工程设计和分析方法,通过对实际结构的离散化,将其划分为许多小的单元,然后利用数值方法求解它们的行为。
下面是一些常用的有限元分析函数和工具箱。
1. finemesh函数finemesh函数是Matlab的一个内置函数,用于生成网格。
它可以根据给定的节点坐标和连接关系生成一个三角或四边形网格。
finemesh函数的语法如下:mesh = finemesh(node, elem);其中,node是一个N×2的矩阵,表示节点的坐标;elem是一个M×3或M×4的矩阵,表示节点之间的连接关系。
2. assempde函数assempde函数是Matlab Partial Differential Equation Toolbox的一部分,用于组装有限元方程。
它将已知的系数和边界条件应用于有限元方程,并返回一个描述矩阵和向量的数据结构。
assempde函数的语法如下:[stiff,force] = assempde(pde,geometry,temperature,flux);其中,pde是一个描述方程系数的结构体;geometry是一个描述几何形状的结构体;temperature和flux是分别描述温度和通量边界条件的结构体。
3. assemble函数assemble函数是一个用于组装有限元方程的通用函数。
它可以使用用户提供的形状函数和积分点来计算单元刚度矩阵和力矢量。
assemble函数的语法如下:[K,F] = assemble(p,t,c,b,v);其中,p是一个N×2的矩阵,表示节点坐标;t是一个M×3的矩阵,表示节点之间的连接关系;c是一个描述系数的函数句柄;b是描述边界条件的函数句柄;v是描述体积力的函数句柄。
(完整版)有限元大作业matlab---课程设计例子
有限元大作业程序设计学校:天津大学院系:建筑工程与力学学院专业:01级工程力学姓名:刘秀学号:\\\\\\\\\\\指导老师:连续体平面问题的有限元程序分析[题目]:如图所示的正方形薄板四周受均匀载荷的作用,该结构在边界上受正向分布压力,m kNp 1=,同时在沿对角线y 轴上受一对集中压力,载荷为2KN ,若取板厚1=t ,泊松比0=v 。
[分析过程]:由于连续平板的对称性,只需要取其在第一象限的四分之一部分参加分析,然后人为作出一些辅助线将平板“分割”成若干部分,再为每个部分选择分析单元。
采用将此模型化分为4个全等的直角三角型单元。
利用其对称性,四分之一部分的边界约束,载荷可等效如图所示。
[程序原理及实现]:用FORTRAN程序的实现。
由节点信息文件NODE.IN和单元信息文件ELEMENT.IN,经过计算分析后输出一个一般性的文件DATA.OUT。
模型基本信息由文件为BASIC.IN生成。
该程序的特点如下:问题类型:可用于计算弹性力学平面问题和平面应变问题单元类型:采用常应变三角形单元位移模式:用用线性位移模式载荷类型:节点载荷,非节点载荷应先换算为等效节点载荷材料性质:弹性体由单一的均匀材料组成约束方式:为“0”位移固定约束,为保证无刚体位移,弹性体至少应有对三个自由度的独立约束方程求解:针对半带宽刚度方程的Gauss消元法输入文件:由手工生成节点信息文件NODE.IN,和单元信息文件ELEMENT.IN结果文件:输出一般的结果文件DATA.OUT程序的原理如框图:(1)主要变量:ID:问题类型码,ID=1时为平面应力问题,ID=2时为平面应变问题N_NODE:节点个数N_LOAD:节点载荷个数N_DOF:自由度,N_DOF=N_NODE*2(平面问题)N_ELE:单元个数N_BAND:矩阵半带宽N_BC:有约束的节点个数PE:弹性模量PR:泊松比PT:厚度LJK_ELE(I,3):单元节点编号数组,LJK_ELE(I,1),LJK_ELE(I,2),LJK_ELE(I,3)分别放单元I的三个节点的整体编号X(N_NODE), Y(N_NODE):节点坐标数组,X(I),Y(I)分别存放节点I的x,y 坐标值P_LJK(N_BC,3):节点载荷数组,P_LJK(I,1)表示第I个作用有节点载荷的节点的编号,P_LJK(I,2),P_LJK(I,3)分别为该节点沿x,y方向的节点载荷数值AK(N_DOF,N_BAND):整体刚度矩阵AKE(6,6):单元刚度矩阵BB(3,6):位移……应变转换矩阵(三节点单元的几何矩阵)DD(3,3):弹性矩阵SS(3,6);应力矩阵RESULT_N(N_NOF):节点载荷数组,存放节点载荷向量,解方程后该矩阵存放节点位移DISP_E(6)::单元的节点位移向量STS_ELE(N_ELE,3):单元的应力分量STS_ND(N_NODE,3):节点的应力分量(2)子程序说明:READ_IN:读入数据BAND_K:形成半带宽的整体刚度矩阵FORM_KE:计算单元刚度矩阵FORM_P:计算节点载荷CAL_AREA:计算单元面积DO_BC:处理边界条件CLA_DD:计算单元弹性矩阵SOLVE:计算节点位移CLA_BB:计算单元位移……应变关系矩阵CAL_STS:计算单元和节点应力(3)文件管理:源程序文件:chengxu.for程序需读入的数据文件:BASIC.IN,NODE.IN,ELEMENT.IN(需要手工生成)程序输出的数据文件:DATA.OUT(4)数据文件格式:需读入的模型基本信息文件BASIC.IN的格式如下表需读入的节点信息文件NODE.IN的格式如下表需读入的单元信息文件ELEMENT.IN的格式如下表输出结果文件DATA.OUT格式如下表[算例原始数据和程序分析]:(1)模型基本信息文件BASIC.IN的数据为1,4,6,5,31.,0.,1.1,1,0,2,1,0,4,1,1,5,0,1,6,0,11,-0.5,-1.5,3.,-1.,-1,6,-0.5,-0.5(2)手工准备的节点信息文件NODE.IN的数据为1 0.0 2.02 0.0 1.03 1.0 1.04 0. 0.5 1.0 0.6 2.0 0.(3)手工准备的单元信息文件ELEMENT.IN的数据为1 2 3 3 0 0 0 0 1 1 1 1 0 12 4 5 5 0 0 0 0 1 1 1 1 0 25 3 2 2 0 0 0 0 1 1 1 1 0 33 5 6 6 0 0 0 0 1 1 1 1 04 (4)源程序文件chengxu.for为:PROGRAM FEM2DDIMENSION IJK_ELE(500,3),X(500),Y(500),IJK_U(50,3),P_IJK(50,3),&RESULT_N(500),AK(500,100)D IMENSION STS_ELE(500,3),STS_ND(500,3)OPEN(4,FILE='BASIC.IN')OPEN(5,FILE='NODE.IN')OPEN(6,FILE='ELEMENT.IN')OPEN(8,FILE='DATA.OUT')OPEN(9,FILE='FOR_POST.DAT')READ(4,*)ID,N_ELE,N_NODE,N_BC,N_LOADIF(ID.EQ.1)WRITE(8,20)IF(ID.EQ.2)WRITE(8,25)20 FORMAT(/5X,'=========PLANE STRESS PROBLEM========')25 FORMAT(/5X,'=========PLANE STRAIN PROBLEM========')CALL READ_IN(ID,N_ELE,N_NODE,N_BC,N_BAND,N_LOAD,PE,PR,PT, & IJK_ELE,X,Y,IJK_U,P_IJK)CALL BAND_K(N_DOF,N_BAND,N_ELE,IE,N_NODE,& IJK_ELE,X,Y,PE,PR,PT,AK)CALL FORM_P(N_ELE,N_NODE,N_LOAD,N_DOF,IJK_ELE,X,Y,P_IJK, & RESULT_N)CALL DO_BC(N_BC,N_BAND,N_DOF,IJK_U,AK,RESULT_N)CALL SOLVE(N_NODE,N_DOF,N_BAND,AK,RESULT_N)CALL CAL_STS(N_ELE,N_NODE,N_DOF,PE,PR,IJK_ELE,X,Y,RESULT_N, & STS_ELE,STS_ND)c to putout a data fileWRITE(9,70)REAL(N_NODE),REAL(N_ELE)70 FORMAT(2f9.4)WRITE(9,71)(X(I),Y(I),RESULT_N(2*I-1),RESULT_N(2*I),& STS_ND(I,1),STS_ND(I,2),STS_ND(I,3),I=1,N_NODE)71 FORMA T(7F9.4)WRITE(9,72)(REAL(IJK_ELE(I,1)),REAL(IJK_ELE(I,2)),&REAL(IJK_ELE(I,3)),REAL(IJK_ELE(I,3)),&STS_ELE(I,1),STS_ELE(I,2),STS_ELE(I,3),I=1, N_ELE)72 FORMAT(7f9.4)cCLOSE(4)CLOSE(5)CLOSE(6)CLOSE(8)CLOSE(9)E NDcc to get the original data in order to model the problemSUBROUTINE READ_IN(ID,N_ELE,N_NODE,N_BC,N_BAND,N_LOAD,PE,PR, &PT,IJK_ELE,X,Y,IJK_U,P_IJK)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),IJK_U(N_BC,3), & P_IJK(N_LOAD,3),NE_ANSYS(N_ELE,14)REAL ND_ANSYS(N_NODE,3)READ(4,*)PE,PR,PTREAD(4,*)((IJK_U(I,J),J=1,3),I=1,N_BC)READ(4,*)((P_IJK(I,J),J=1,3),I=1,N_LOAD)READ(5,*)((ND_ANSYS(I,J),J=1,3),I=1,N_NODE)READ(6,*)((NE_ANSYS(I,J),J=1,14),I=1,N_ELE)DO 10 I=1,N_NODEX(I)=ND_ANSYS(I,2)Y(I)=ND_ANSYS(I,3)10 CONTINUEDO 11 I=1,N_ELEDO 11 J=1,3IJK_ELE(I,J)=NE_ANSYS(I,J)11 CONTINUEN_BAND=0DO 20 IE=1,N_ELEDO 20 I=1,3DO 20 J=1,3IW=IABS(IJK_ELE(IE,I)-IJK_ELE(IE,J))IF(N_BAND.LT.IW)N_BAND=IW20 CONTINUEN_BAND=(N_BAND+1)*2IF(ID.EQ.1) THENELSEPE=PE/(1.0-PR*PR)PR=PR/(1.0-PR)END IFR ETURNENDcC to form the stiffness matrix of elementSUBROUTINE FORM_KE(IE,N_NODE,N_ELE,IJK_ELE,X,Y,PE,PR,PT,AKE) DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),BB(3,6),DD(3,3), & AKE(6,6), SS(6,6)CALL CAL_DD(PE,PR,DD)CALL CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB)DO 10 I=1,3DO 10 J=1,6SS(I,J)=0.0DO 10 K=1,310 SS(I,J)=SS(I,J)+DD(I,K)*BB(K,J)DO 20 I=1,6DO 20 J=1,6AKE(I,J)=0.0DO 20 K=1,320 AKE(I,J)=AKE(I,J)+SS(K,I)*BB(K,J)*AE*PTRETURNENDcc to form banded global stiffness matrixSUBROUTINE BAND_K(N_DOF,N_BAND,N_ELE,IE,N_NODE,IJK_ELE,X,Y,PE, & PR,PT,AK)DIMENSIONIJK_ELE(500,3),X(N_NODE),Y(N_NODE),AKE(6,6),AK(500,100)N_DOF=2*N_NODEDO 40 I=1,N_DOFDO 40 J=1,N_BAND40 AK(I,J)=0DO 50 IE=1,N_ELECALL FORM_KE(IE,N_NODE,N_ELE,IJK_ELE,X,Y,PE,PR,PT,AKE)DO 50 I=1,3DO 50 II=1,2IH=2*(I-1)+IIIDH=2*(IJK_ELE(IE,I)-1)+IIDO 50 J=1,3DO 50 JJ=1,2IL=2*(J-1)+JJIZL=2*(IJK_ELE(IE,J)-1)+JJIDL=IZL-IDH+1IF(IDL.LE.0) THENELSEAK(IDH,IDL)=AK(IDH,IDL)+AKE(IH,IL)END IF50 CONTINUERETURNENDcc to calculate the area of elementSUBROUTINE CAL_AREA(IE,N_NODE,IJK_ELE,X,Y,AE)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE)I=IJK_ELE(IE,1)J=IJK_ELE(IE,2)K=IJK_ELE(IE,3)XIJ=X(J)-X(I)YIJ=Y(J)-Y(I)XIK=X(K)-X(I)YIK=Y(K)-Y(I)AE=(XIJ*YIK-XIK*YIJ)/2.0RETURNENDcc to calculate the elastic matrix of elementSUBROUTINE CAL_DD(PE,PR,DD)DIMENSION DD(3,3)DO 10 I=1,3DO 10 J=1,310 DD(I,J)=0.0DD(1,1)=PE/(1.0-PR*PR)DD(1,2)=PE*PR/(1.0-PR*PR)DD(2,1)=DD(1,2)DD(2,2)=DD(1,1)DD(3,3)=PE/((1.0+PR)*2.0)RETURNENDcc to calculate the strain-displacement matrix of elementSUBROUTINE CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB) DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),BB(3,6)I=IJK_ELE(IE,1)J=IJK_ELE(IE,2)K=IJK_ELE(IE,3)DO 10 II=1,3DO 10 JJ=1,310 BB(II,JJ)=0.0BB(1,1)=Y(J)-Y(K)BB(1,3)=Y(K)-Y(I)BB(1,5)=Y(I)-Y(J)BB(2,2)=X(K)-X(J)BB(2,4)=X(I)-X(K)BB(2,6)=X(J)-X(I)BB(3,1)=BB(2,2)BB(3,2)=BB(1,1)BB(3,3)=BB(2,4)BB(3,4)=BB(1,3)BB(3,5)=BB(2,6)BB(3,6)=BB(1,5)CALL CAL_AREA(IE,N_NODE,IJK_ELE,X,Y,AE)DO 20 I1=1,3DO 20 J1=1,620 BB(I1,J1)=BB(I1,J1)/(2.0*AE)RETURNENDcc to form the global load matrixSUBROUTINE FORM_P(N_ELE,N_NODE,N_LOAD,N_DOF,IJK_ELE,X,Y,P_IJK, & RESULT_N)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),P_IJK(N_LOAD,3), & RESULT_N(N_DOF)DO 10 I=1,N_DOF10 RESULT_N(I)=0.0DO 20 I=1,N_LOADII=P_IJK(I,1)RESULT_N(2*II-1)=P_IJK(I,2)20 RESULT_N(2*II)=P_IJK(I,3)RETURNENDcc to deal with BC(u) (here only for fixed displacement) using "1-0" method SUBROUTINE DO_BC(N_BC,N_BAND,N_DOF,IJK_U,AK,RESULT_N) DIMENSION RESULT_N(N_DOF),IJK_U(N_BC,3),AK(500,100)DO 30 I=1,N_BCIR=IJK_U(I,1)DO 30 J=2,3IF(IJK_U(I,J).EQ.0)THENELSEII=2*IR+J-3AK(II,1)=1.0RESULT_N(II)=0.0DO 10 JJ=2,N_BAND10 AK(II,JJ)=0.0DO 20 JJ=2,II20 AK(II-JJ+1,JJ)=0.0END IF30 CONTINUERETURNENDcc to solve the banded FEM equation by GAUSS eliminationSUBROUTINE SOLVE(N_NODE,N_DOF,N_BAND,AK,RESULT_N) DIMENSION RESULT_N(N_DOF),AK(500,100)DO 20 K=1,N_DOF-1IF(N_DOF.GT.K+N_BAND-1)IM=K+N_BAND-1IF(N_DOF.LE.K+N_BAND-1)IM=N_DOFDO 20 I=K+1,IML=I-K+1C=AK(K,L)/AK(K,1)IW=N_BAND-L+1DO 10 J=1,IWM=J+I-K10 AK(I,J)=AK(I,J)-C*AK(K,M)20 RESULT_N(I)=RESULT_N(I)-C*RESULT_N(K)RESULT_N(N_DOF)=RESULT_N(N_DOF)/AK(N_DOF,1)DO 40 I1=1,N_DOF-1I=N_DOF-I1IF(N_BAND.GT.N_DOF-I-1)JQ=N_DOF-I+1IF(N_BAND.LE.N_DOF-I-1)JQ=N_BANDDO 30 J=2,JQK=J+I-130 RESULT_N(I)=RESULT_N(I)-AK(I,J)*RESULT_N(K)40 RESULT_N(I)=RESULT_N(I)/AK(I,1)WRITE(8,50)50 FORMAT(/12X,'* * * * * RESULTS BY FEM2D * * * * *',//8X,&'--DISPLACEMENT OF NODE--'//5X,'NODE NO',8X,'X-DISP',8X,'Y-DISP') DO 60 I=1,N_NODE60 WRITE(8,70) I,RESULT_N(2*I-1),RESULT_N(2*I)70 FORMAT(8X,I5,7X,2E15.6)RETURNENDcc calculate the stress components of element and nodeSUBROUTINECAL_STS(N_ELE,N_NODE,N_DOF,PE,PR,IJK_ELE,X,Y,RESULT_N, &STS_ELE,STS_ND)DIMENSION IJK_ELE(500,3),X(N_NODE),Y(N_NODE),DD(3,3),BB(3,6), &SS(3,6),RESULT_N(N_DOF),DISP_E(6)DIMENSION STS_ELE(500,3),STS_ND(500,3)WRITE(8,10)10 FORMAT(//8X,'--STRESSES OF ELEMENT--')CALL CAL_DD(PE,PR,DD)DO 50 IE=1,N_ELECALL CAL_BB(IE,N_NODE,N_ELE,IJK_ELE,X,Y,AE,BB)DO 20 I=1,3DO 20 J=1,6SS(I,J)=0.0DO 20 K=1,320 SS(I,J)=SS(I,J)+DD(I,K)*BB(K,J)DO 30 I=1,3DO 30 J=1,2IH=2*(I-1)+JIW=2*(IJK_ELE(IE,I)-1)+J30 DISP_E(IH)=RESULT_N(IW)STX=0STY=0TXY=0DO 40 J=1,6STX=STX+SS(1,J)*DISP_E(J)STY=STY+SS(2,J)*DISP_E(J)40 TXY=TXY+SS(3,J)*DISP_E(J)STS_ELE(IE,1)=STXSTS_ELE(IE,2)=STYSTS_ELE(IE,3)=TXY50 WRITE(8,60)IE,STX,STY,TXY60 FORMAT(1X,'ELEMENT NO.=',I5/18X,'STX=',E12.6,5X,'STY=',&E12.6,2X,'TXY=',E12.6)c the following part is to calculate stress components of nodeWRITE(8,55)55 FORMAT(//8X,'--STRESSES OF NODE--')DO 90 I=1,N_NODEA=0.B=0.C=0.II=0DO 70 K=1,N_ELEDO 70 J=1,3IF(IJK_ELE(K,J).EQ.I) THENII=II+1A=A+STS_ELE(K,1)B=B+STS_ELE(K,2)C=C+STS_ELE(K,3)END IF70 CONTINUESTS_ND(I,1)=A/IISTS_ND(I,2)=B/IISTS_ND(I,3)=C/IIWRITE(8,75)I,STS_ND(I,1),STS_ND(I,2),STS_ND(I,3)75 FORMAT(1X,'NODE NO.=',I5/18X,'STX=',E12.6,5X,'STY=',&E12.6,2X,'TXY=',E12.6)90 CONTINUERETURNENDc FEM2D programm end[算例结果]:chengxu.for所输出的数据文件DATA.OUT数据内容如下:=========PLANE STRESS PROBLEM========* * * * * RESULTS BY FEM2D * * * * *--DISPLACEMENT OF NODE--NODE NO X-DISP Y-DISP1 .000000E+00 -.525275E+012 .000000E+00 -.225275E+013 -.108791E+01 -.137363E+014 .000000E+00 .000000E+005 -.824176E+00 .000000E+006 -.182418E+01 .000000E+00--STRESSES OF ELEMENT--ELEMENT NO.= 1STX=-.108791E+01 STY=-.300000E+01 TXY= .439560E+00ELEMENT NO.= 2STX=-.824176E+00 STY=-.225275E+01 TXY= .000000E+00ELEMENT NO.= 3STX=-.108791E+01 STY=-.137363E+01 TXY= .307692E+00ELEMENT NO.= 4STX=-.100000E+01 STY=-.137363E+01 TXY=-.131868E+00--STRESSES OF NODE--NODE NO.= 1STX=-.108791E+01 STY=-.300000E+01 TXY= .439560E+00NODE NO.= 2STX=-.100000E+01 STY=-.220879E+01 TXY= .249084E+00NODE NO.= 3STX=-.105861E+01 STY=-.191575E+01 TXY= .205128E+00NODE NO.= 4STX=-.824176E+00 STY=-.225275E+01 TXY= .000000E+00NODE NO.= 5STX=-.970696E+00 STY=-.166667E+01 TXY= .586081E-01NODE NO.= 6STX=-.100000E+01 STY=-.137363E+01 TXY=-.131868E+00[结论与体会]:通过本次的课程设计,我对有限元的概念有了更加深刻的理解,同时也弥补了平时学习是疏忽的地方,充实了有限元知识。
matlab有限元法

matlab有限元法
有限元法是一种常用的工程数值计算方法,广泛应用于结构力学、流体力学、热传导等领域。
它通过将复杂的连续体分割成有限个简单的单元,利用单元之间的相互关系来近似描述整个问题的解。
在工程实践中,有限元法已经成为一种不可或缺的分析工具。
有限元法的基本步骤包括建立数学模型、离散化、确定边界条件、求解方程、后处理等。
首先,需要将实际工程问题转化为数学模型,确定问题的几何形状、材料特性和载荷条件。
然后,将问题离散化,即将结构分割成有限个简单的单元,并确定单元之间的连接关系。
接下来,需要确定边界条件,即给定结构的边界约束和外部载荷。
然后,通过求解离散化后的方程组,得到问题的数值解。
最后,进行后处理,分析和展示结果。
有限元法的优点在于能够处理复杂的几何形状和边界条件,可以模拟各种不同的物理现象,并且具有较高的精度和可靠性。
它能够帮助工程师更好地理解和设计结构,提高工程的可靠性和安全性。
然而,有限元法也存在一些局限性。
首先,离散化过程会引入一定的误差,尤其是在模型中存在较大的变形或应力集中的情况下。
其次,求解大规模的方程组需要较高的计算资源和时间。
此外,有限元法对材料的本构关系和边界条件的设定要求较高,需要进行合理的模型假设和参数选择。
总的来说,有限元法是一种强大而灵活的工程分析方法,能够帮助工程师解决各种复杂的工程问题。
通过合理的模型建立和边界条件设定,以及精确的计算和后处理,可以得到准确可靠的结果,为工程设计和优化提供有力支持。
有限元方法步骤-MATLAB的简略使用指南
第1章引言这个简短的引言分为两部分,第一部分是对有限元方法步骤的概括介绍,第二部分是MATLAB的简略使用指南。
1.1 有限元方法的步骤有许多关于有限元分析的优秀教材,比如在参考文献[1-18]中列出的那些书目。
因此,本书不准备对有限元理论或有限元方程进行详细地阐述和推导。
每一章只总结概括主要的方程,这些章节都附有示例来说明这些方程。
此外,全书只讨论线弹性结构力学的问题。
有限元方法用于解决工程问题的数值计算过程。
本书假定所有的行为都是线弹性行为。
虽然本书的问题都与结构工程相关,但有限元方法也同样适用于工程的其他领域。
本书中使用有限元方法解决问题共包括6个步骤。
对有限元分析的6个步骤阐述如下:(1) 离散化域——这个步骤包括将域分解成单元和节点。
对于像桁架和刚架这类离散系统,已经离散化,这一步就不需要了。
此处获得的结果应该已经是精确的。
然而,对于连续系统,如板壳,这一步就变得至关重要,因为它只能得到近似的结果。
因此解决方案的精确度取决于所使用的离散化方法。
本书中,我们将手动完成这一步(对连续系统)。
(2) 写出单元刚度矩阵(element stiffness matrices)——写出域内每个单元的单元刚度矩阵。
在本书中,这个步骤通过MATLAB实现。
(3) 集成整体刚度矩阵(global stiffness matrices)——这一步用直接刚度法(direct stiffness approach)实现。
在本书中,该步骤借助于MATLAB实现。
(4) 引入边界条件——诸如支座(supports)、外加载荷(applied loads)和位移(displacements)等。
本书中手动实现这一步骤。
(5) 解方程——这一步骤分解整体刚度矩阵并用高斯消去法求解方程组。
在本书中,在用高斯消去法实现求解部分的时候需要手动分解矩阵。
(6) 后处理——得到额外的信息,如支反力、单元节点力和单元应力。
本书中这一步骤通过MATLAB实现。
有限元数值解法在MATLAB中的实现及可视化
有限元数值解法在MATLAB中的实现及可视化摘要:偏微分方程的数值解法在数值分析中占有很重要的地位,很多科学技术问题的数值计算包括了偏微分方程的数值解问题。
在学习初等函数时,总是先画出它们的图形,因为图形能帮助我们了解函数的性质。
而对于偏微分方程,画出它们的图形并不容易,尤其是没有解析解的偏微分方程,画图就显得更加不容易了。
为了从偏微分方程的数学表达式中看出其所表达的图形、函数值与自变量之间的关系,通过MATLAB编程,用有限元数值解法求解了偏微分方程,并将其结果可视化。
关键词:偏微分方程;MATLAB;有限元法;可视化1 引言(Introduction)偏微分方程的数值解法在数值分析中占有很重要的地位,很多科学技术问题的数值计算包括了偏微分方程的数值解问题。
近三十多年来,它的理论和方法都有了很大的发展,而且在各个科学技术的领域中应用也愈来愈广泛。
例如,核武器的研制要有理论设计和核试验。
但核反应和核爆炸的过程是在高温高压的条件下进行的,而且巨大的能量在极短的时间内释放出来,核装置内部的细致反应过程及各个物理量的变化是根本不能用仪器测量出来的,核试验只是提供综合的数据。
而描述核反应和爆炸物理过程的数学模型是一个很复杂的非线性偏微分方程组,也根本没有办法得到这个方程组理论上的精确解。
所以发展核武器的国家都在计算机上对核反应过程进行数值模拟,这也称为“数值核实验”,它可以大大减少核试验的次数,节约大量的经费,缩短研制的周期[1]。
在学习初等函数时,总是先画出它们的图形,因为图形能帮助我们了解函数的性质。
而对于偏微分方程,画出它们的图形并不容易,尤其是没有解析解的偏微分方程,画图就显得更加不容易了。
所以本文主要研究如何用MATLAB数值求解偏微分方程,并将其数值解绘制成三维图形的形式,从而可以从复杂的数学表达式中看出其所表达的图像、函数值与自变量之间的关系[2]。
2 有限元法(Finite element method)2.1 有限元法概述有限元法的基本思想是将结构离散化,用有限个容易分析的单元来表示复杂的对象,单元之间通过有限个节点相互连接,然后根据变形协调条件综合求解。
有限元的MATLAB解法
有限元的MATLAB解法1.打开MATLAB。
2.输入“pdetool”再回车,会跳出PDE Toolbox的窗口(PDE意为偏微分方程,是partial differential equations的缩写),需要的话可点击Options菜单下Grid命令,打开栅格。
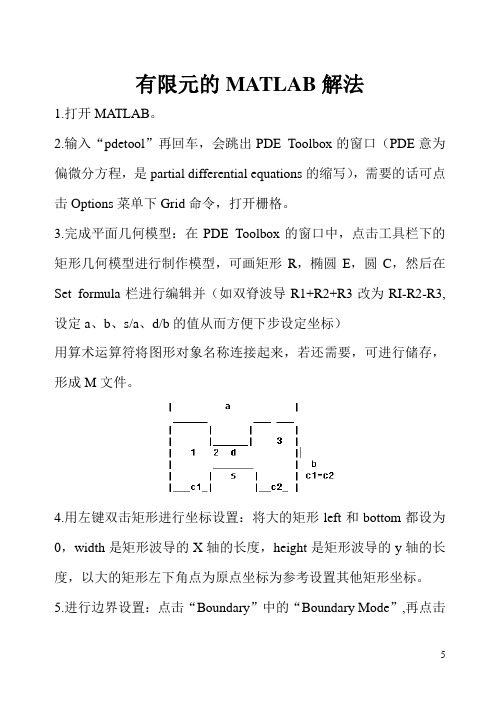
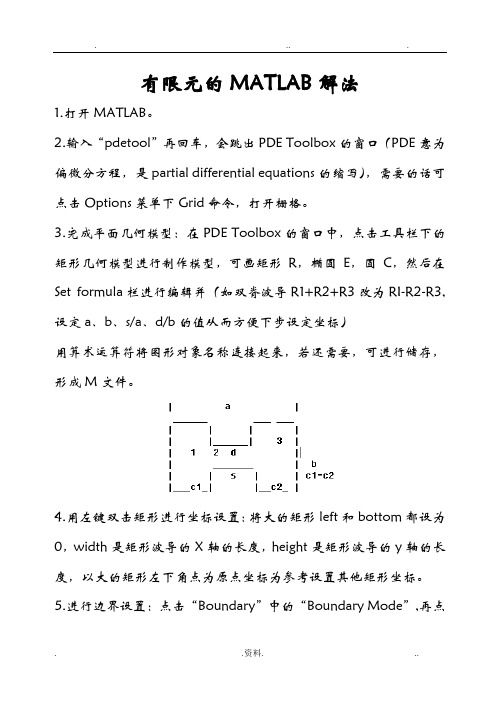
3.完成平面几何模型:在PDE Toolbox的窗口中,点击工具栏下的矩形几何模型进行制作模型,可画矩形R,椭圆E,圆C,然后在Set formula栏进行编辑并(如双脊波导R1+R2+R3改为RI-R2-R3,设定a、b、s/a、d/b的值从而方便下步设定坐标)用算术运算符将图形对象名称连接起来,若还需要,可进行储存,形成M文件。
4.用左键双击矩形进行坐标设置:将大的矩形left和bottom都设为0,width是矩形波导的X轴的长度,height是矩形波导的y轴的长度,以大的矩形左下角点为原点坐标为参考设置其他矩形坐标。
5.进行边界设置:点击“Boundary”中的“Boundary Mode”,再点击“Boundary”中的“Specify Boundary Conditions”,选择符合的边界条件,Neumann为诺曼条件,Dirichlet为狄利克雷条件,边界颜色显示为红色。
6.进入PDE模式:点击"PDE"菜单下“PDE Mode”命令,进入PDE 模式,单击“PDE Specification”,设置方程类型,“Elliptic”为椭圆型,“Parabolic”为抛物型,“Hyperbolic”为双曲型,“Eigenmodes”为特征值问题。
7.对模型进行剖分:点击“Mesh”中“Initialize Mesh”进行初次剖分,若要剖的更细,再点击“Refine Mesh”进行网格加密。
8.进行计算:点击“Solve”中“Solve PDE”,解偏微分方程并显示图形解,u值即为Hz或者Ez。
9.单击“Plot”菜单下“Parameters”选项,打开“Plot Selection”对话框。
matlab有限元计算

matlab有限元计算有限元计算是一种常用的数值计算方法,广泛应用于工程领域。
而Matlab作为一种强大的数值计算软件,提供了丰富的工具和函数,使得有限元计算变得更加简单和高效。
有限元计算是一种将连续问题离散化为有限个简单子问题的方法。
它将复杂的连续问题转化为离散的有限元网格,然后通过求解每个单元上的方程,最终得到整个问题的解。
有限元计算可以用于求解结构力学、流体力学、热传导等各种物理问题。
在Matlab中进行有限元计算,首先需要构建有限元模型。
有限元模型由节点和单元组成,节点是问题的离散点,单元是连接节点的基本单元。
在Matlab中,可以使用函数如meshgrid、linspace等来生成节点坐标,使用函数如delaunay、trimesh等来生成单元。
然后,需要定义问题的边界条件和加载条件。
边界条件是指在问题的边界上给定的约束条件,加载条件是指在问题中施加的外部力或位移。
在Matlab中,可以使用函数如boundary、findEdges等来定义边界条件,使用函数如force、displacement等来定义加载条件。
接下来,需要定义问题的材料性质和单元特性。
材料性质是指问题中所使用的材料的力学性质,单元特性是指单元的几何形状和材料性质。
在Matlab中,可以使用函数如materialProperties、elementProperties等来定义材料性质和单元特性。
然后,需要建立有限元方程。
有限元方程是通过对每个单元上的方程进行组装得到的整体方程。
在Matlab中,可以使用函数如stiffnessMatrix、loadVector等来建立有限元方程。
最后,需要求解有限元方程。
在Matlab中,可以使用函数如solve、eigs等来求解有限元方程。
求解得到的结果可以用于分析问题的应力、位移、变形等。
除了上述基本步骤,Matlab还提供了丰富的后处理工具和函数,用于可视化和分析有限元计算的结果。
matlab 有限元法

matlab 有限元法
Matlab中的有限元法(Finite Element Method,FEM)是一种常用的数值分析方法,用于模拟和解决包括结构力学、热传导、流体力学等问题。
它将连续介质划分为离散的有限单元,通过建立数学模型和使用近似解法来求解。
下面是一般步骤来使用Matlab进行有限元分析:
1. 剖分网格:将要模拟的连续介质划分为离散的有限单元(如三角形或四边形元素)。
2. 建立数学模型:根据具体问题的物理方程或导引方程,建立线性或非线性的方程模型。
3. 施加边界条件:确定并施加边界条件,如位移、载荷或约束等。
4. 组装刚度矩阵和载荷向量(Assembly):通过元素刚度矩阵的组装,得到总系统的刚度矩阵和载荷向量。
5. 求解方程:通过求解总系统的线性方程组,得到未知位移或其他需要的结果。
6. 后处理结果:对求解结果进行可视化或分析,如绘制应力分布、位移云图、应变曲线等。
Matlab提供了丰富的工具箱和函数,用于各种结构和物理问题的有限元分析,例如Partial Differential Equation Toolbox(部分微分方程工具箱)和Structural Analysis T oolbox(结构分析工具箱),其中包含了常用的有限元分析函数和设置界面。
另外,Matlab还支持用户自定义编程,允许使用脚本或函
数来实现特定的有限元算法。
总之,通过Matlab的有限元分析工具和编程能力,可以方便地进行各种结构和物理问题的数值分析和模拟。
matlab有限元常用函数 -回复

matlab有限元常用函数-回复MATLAB有限元常用函数有限元方法是求解连续介质力学问题的一种数值方法,广泛应用于结构力学、流体力学、热传导等领域。
MATLAB作为一种强大的数值计算软件,提供了许多有限元分析用的工具和函数。
本文将对MATLAB中一些常用的有限元函数进行介绍。
1. mesh函数在进行有限元分析之前,首先需要对待分析的物体建立网格。
在MATLAB中,mesh函数可以生成和绘制二维和三维网格。
它的语法如下:mesh(nodes,elements)其中nodes是节点坐标矩阵,每一行表示一个节点的坐标,elements 是单元连接矩阵,每一行表示一个单元的节点连接情况。
通过mesh函数生成的网格可以直接在图形窗口中进行可视化。
2. pdegeom函数在复杂的有限元分析中,往往需要对复杂几何形状进行建模。
pdegeom函数是一个用于创建几何形状的函数,它可以使用简单的几何原语来创建几何形状。
例如,通过定义圆、矩形、椭圆等几何形状,再通过一些操作,如旋转、平移和缩放,可以创建出更复杂的几何形状。
pdegeom函数的语法如下:[p, e, t] = pdegeom(geometry, [ns], [sf])其中geometry是一个包含几何原语的结构体,ns是一个可选参数,表示几何原语的分段数,sf是一个可选参数,表示几何原语的平滑度。
p, e,t分别表示节点、边界和单元连接数据。
3. pdepoly函数pdepoly函数是一个简化建模几何形状的函数。
它可以通过指定顶点坐标创建一个多边形区域。
pdepoly函数的语法如下:[p, e, t] = pdepoly(vertices)其中vertices是一个包含多边形顶点坐标的矩阵。
通过pdepoly函数生成的几何形状可以直接用于后续的有限元分析。
4. assema函数在有限元分析中,常常需要构建刚度矩阵和负载向量。
assema函数是用于组装局部刚度矩阵和负载向量的函数。
matlab 程序 2d有限元方法

matlab 程序2d有限元方法二维有限元方法在工程与科学计算中有着广泛的应用。
MATLAB作为一种功能强大的数学软件,为二维有限元分析提供了便捷的实现途径。
本文将详细介绍如何使用MATLAB编写二维有限元方法的程序。
一、有限元方法概述有限元方法(Finite Element Method,简称FEM)是一种用于求解偏微分方程的数值方法。
它通过将复杂的连续体划分成简单的单元,并在这些单元上求解方程,从而将连续问题转化为离散问题。
在二维问题中,通常将连续区域划分为三角形或四边形单元,然后在每个单元上求解偏微分方程,最后通过整体刚度矩阵的组装和求解得到整个区域的解。
二、MATLAB编程实现二维有限元方法以下是使用MATLAB实现二维有限元方法的基本步骤:1.创建网格在MATLAB中,可以使用`triangle`函数或`patch`函数创建二维网格。
以下是一个简单的例子:```matlab% 定义节点坐标odes = [0 0; 1 0; 1 1; 0 1; 0.5 0.5];% 定义单元连接关系elements = [1 2 5; 2 3 5; 3 4 5; 4 1 5];% 绘制网格triplot(nodes, elements);```2.确定单元属性在二维有限元方法中,需要为每个单元定义形状函数、雅可比矩阵等属性。
以下是一个示例:```matlabfunction [N, dNdx, dNdy, J] = shape_functions(nodes, element) % 获取单元节点坐标x = nodes(element, 1);y = nodes(element, 2);% 计算形状函数N = [1 - (x - x(1)) / (x(2) - x(1)) - (y - y(1)) / (y(2) - y(1));(x - x(1)) / (x(2) - x(1));(y - y(1)) / (y(2) - y(1));(x - x(1)) / (x(2) - x(1)) * (y - y(1)) / (y(2) - y(1))];% 计算形状函数对x、y的导数dNdx = [-1 / (x(2) - x(1)), 1 / (x(2) - x(1)), 0, (y(2) - y(1)) / ((x(2) - x(1)) * (y(2) - y(1)))];dNdy = [0, 0, 1 / (y(2) - y(1)), (x(2) - x(1)) / ((x(2) - x(1)) * (y(2) - y(1)))];% 计算雅可比矩阵J = [sum(dNdx), sum(dNdy); ...sum(dNdx .* x), sum(dNdy .* x); ...sum(dNdx .* y), sum(dNdy .* y)];end```3.组装刚度矩阵和质量矩阵在得到单元属性后,可以组装整体刚度矩阵和质量矩阵。
有限元的matlab编程

本程序的网架位移求解函数附在主程序后面,主程序运行时调用该函数。
完整ppt
14
几何建模 定义荷载
用自定义输入
加下划线的为单元编号
完整ppt
5
形成等效荷载列阵
f=[0;0;0;a;0;0;0;a;0;0;0;a;0;0;0;a;0;0;0;a];%每个节点两个自由度,a 为之前输入的节点力
集成总刚:
获取单元两端节点坐标
xi = Node( Element( ie, 1 ), 1 ) ;%ie为单元号,以下相同 yi = Node( Element( ie, 1 ), 2 ) ; xj = Node( Element( ie, 2 ), 1 ) ; yj = Node( Element( ie, 2 ), 2 ) ;
节点号:',num2str(Element(ie,2)),' 轴力:',num2str(nodef(1))] ) ;
完整ppt
12
end
例二:网架
完整ppt
13
思路分析
几点说明
网架是由多根杆件按照一定的网格形式通过节点连结而成的空间结构。构成 网架的基本单元有三角锥,三棱体,正方体,截头四角锥等。鉴于网架的形 式较多,本程序提供一种通用的网架输入方法,但录入较为繁琐,同时提供 一种正放四角锥网架的简易输入方法作为典型。
有限元编程示例
完整ppt
1
例一:桁架
题目描述:
如下图所示的平面桁架,杆件长度、弹性模量、截 面积以及所受节点力P的大小可以自行定义。求节 点位移及杆件轴力。
matlab有限元编程

是的,MATLAB可以用于有限元编程,用于解决各种结构、固体力学、热传导、电磁场等物理问题的数值模拟。
有限元法是一种数值方法,用于求解偏微分方程,特别适用于复杂的几何形状和边界条件的问题。
以下是一些使用MATLAB进行有限元编程的基本步骤:
1. 建立几何模型:首先,需要定义模型的几何形状和边界条件。
这包括确定节点和单元(元素)的位置。
2. 网格生成:将模型划分为离散的节点和单元。
这些节点和单元构成了有限元网格,可以使用MATLAB中的函数或者专用的网格生成工具来实现。
3. 定义材料属性和载荷:为每个单元分配适当的材料属性,如弹性模量、密度等。
同时,还要定义在结构上施加的力或边界条件。
4. 组装刚度矩阵和载荷向量:根据有限元法原理,将每个单元的局部刚度矩阵组装成全局刚度矩阵,同时将载荷向量组装成全局载荷向量。
5. 施加边界条件:根据边界条件,在全局刚度矩阵和载荷向量中施加约束条件。
6. 求解方程:通过求解线性方程组,得到节点的位移和其他所需的结果。
7. 后处理:根据求解结果,进行结果的可视化和分析。
可以绘制应力、应变分布图,计算位移、反应力等。
MATLAB提供了丰富的工具箱和函数来进行有限元编程,如Partial Differential Equation Toolbox(偏微分方程工具箱)、Finite Element Analysis Toolbox(有限元分析工具箱)等,可以大大简化有限元编程的过程。
在使用这些工具时,可以参考MATLAB的官方文档和例子,以及相关的有限元理论和方法。
matlab 有限元 编程

MATLAB 是一种高级编程语言和交互式环境,常用于数值计算、数据分析、算法开发、数据可视化以及应用开发等。
在有限元分析(FEA)中,MATLAB 可以用来编写和运行有限元程序。
以下是一个简单的 MATLAB 有限元分析编程示例:这个例子假设你正在解决一个一维拉普拉斯方程,其形式为 -d^2u/dx^2 = f,在区间 [0, 1] 上。
```matlab% 参数定义L = 1; % 长度h = 0.01; % 步长N = L/h; % 元素数量x = linspace(0, L, N+1); % x 向量% 创建有限元网格nodes = x(1:N+1);elements = [nodes(2:end-1) nodes(1:end-1) nodes(2:end)]; % 定义载荷向量 ff = sin(pi*x);% 定义刚度矩阵 A 和载荷向量 FA = zeros(N, N);F = zeros(N, 1);for i = 1:Nfor j = 1:i-1A(i, j) = A(j, i) = h^2/(6*(x(i)-x(j))^2);endF(i) = -f(i)*h/2;end% 使用 MATLAB 的线性方程求解器u = A\F;% 绘制结果plot(x, u);xlabel('x');ylabel('u');title('有限元解');```这个代码首先定义了问题的参数,然后创建了一个有限元网格。
然后,它定义了刚度矩阵 A 和载荷向量 F。
最后,它使用 MATLAB 的线性方程求解器来求解方程,并绘制结果。
请注意,这只是一个非常简单的例子。
在实际的有限元分析中,问题可能会更复杂,并且需要更多的编程工作。
有限元的MATLAB解法
有限元的MATLAB解法1.打开MATLAB。
2.输入“pdetool”再回车,会跳出PDE Toolbox的窗口(PDE意为偏微分方程,是partial differential equations的缩写),需要的话可点击Options菜单下Grid命令,打开栅格。
3.完成平面几何模型:在PDE Toolbox的窗口中,点击工具栏下的矩形几何模型进行制作模型,可画矩形R,椭圆E,圆C,然后在Set formula栏进行编辑并(如双脊波导R1+R2+R3改为RI-R2-R3,设定a、b、s/a、d/b的值从而方便下步设定坐标)用算术运算符将图形对象名称连接起来,若还需要,可进行储存,形成M文件。
4.用左键双击矩形进行坐标设置:将大的矩形left和bottom都设为0,width是矩形波导的X轴的长度,height是矩形波导的y轴的长度,以大的矩形左下角点为原点坐标为参考设置其他矩形坐标。
5.进行边界设置:点击“Boundary”中的“Boundary Mode”,再点击“Boundary”中的“Specify Boundary Conditions”,选择符合的边界条件,Neumann为诺曼条件,Dirichlet为狄利克雷条件,边界颜色显示为红色。
6.进入PDE模式:点击"PDE"菜单下“PDE Mode”命令,进入PDE 模式,单击“PDE Specification”,设置方程类型,“Elliptic”为椭圆型,“Parabolic”为抛物型,“Hyperbolic”为双曲型,“Eigenmodes”为特征值问题。
7.对模型进行剖分:点击“Mesh”中“Initialize Mesh”进行初次剖分,若要剖的更细,再点击“Refine Mesh”进行网格加密。
8.进行计算:点击“Solve”中“Solve PDE”,解偏微分方程并显示图形解,u值即为Hz或者Ez。
9.单击“Plot”菜单下“Parameters”选项,打开“Plot Selection”对话框。
matlab 程序 2d有限元方法

matlab 程序2d有限元方法全文共四篇示例,供读者参考第一篇示例:有限元方法是一种数值计算方法,旨在解决工程结构、力学和热力学等领域的复杂问题。
这种方法通过将一个连续的问题离散化为无限多的小单元,然后通过求解每个小单元的方程来逼近整个问题的解。
有限元方法在解决非线性、非定常、多物理场耦合等复杂问题上表现出色,因此在工程领域得到了广泛应用。
2D有限元方法是指在二维平面上建立有限元模型,然后求解其方程得到问题的解。
在MATLAB中,构建2D有限元模型的步骤大致分为三个阶段:几何建模、网格剖分和有限元分析。
首先是几何建模阶段,即对求解问题的几何形状进行建模。
这一步通常通过MATLAB中的绘图函数绘制图形,定义节点和单元信息。
这个阶段的难点在于如何准确表达问题的几何形状和边界条件,因为这将直接影响到后续的网格划分和求解结果的准确性。
接着是网格剖分阶段,即将几何形状离散化为小单元。
在MATLAB中,可以利用自带的网格生成函数或者第三方的网格生成工具箱来生成有限元网格。
网格的质量和密度对求解结果的准确性有很大影响,因此在网格剖分时需要谨慎选择参数和方法。
最后是有限元分析阶段,即对离散化后的有限元模型进行求解。
在MATLAB中,可以利用现成的有限元求解函数来求解线性或非线性方程。
在求解过程中,需要考虑边界条件的处理、材料参数的输入和求解精度的控制等因素,以保证求解的准确性和稳定性。
在实际应用中,2D有限元方法常用于解决板、壳结构的弯曲、扭转、振动等问题,以及流体动力学、电磁场等问题。
MATLAB提供了丰富的工具箱和函数库,使得有限元方法的实现更加简单和高效。
通过合理的建模、网格剖分和求解方法,我们可以快速地解决复杂的工程问题,提高工程设计的效率和精度。
2D有限元方法结合MATLAB工具的应用为工程领域提供了一种高效、准确和可靠的计算方法。
通过不断学习和实践,我们可以更好地利用有限元方法解决实际工程问题,推动工程技术的发展和进步。
matlab 编写二位静电场有限元程序
matlab 编写二位静电场有限元程序《MATLAB编写二维静电场有限元程序》在工程领域中,静电场是一个非常重要的概念,它在电力系统、电子设备和传感器等领域都有着广泛的应用。
为了研究和分析静电场的分布情况,有限元方法是一种非常有效的数值计算方法。
本文将探讨如何使用MATLAB编写二维静电场有限元程序,以便更深入地理解这一主题。
一、准备工作在开始编写程序之前,首先需要了解静电场的基本原理和有限元方法的原理。
静电场是由电荷引起的,而有限元方法是一种数值计算方法,用于求解微分方程。
掌握这些理论知识对于编写静电场有限元程序至关重要。
二、程序基本框架1. 定义网格:将二维区域划分为多个小单元,在每个单元内进行计算。
2. 建立有限元方程:根据电场的基本方程和有限元方法,建立离散的数学方程。
3. 求解方程:使用MATLAB的求解器求解离散方程,得到电场分布。
4. 可视化结果:将计算得到的电场分布以图形的形式展现出来,便于分析和理解。
三、具体步骤1. 定义网格:首先需要定义二维区域的网格,在MATLAB中可以使用meshgrid函数来实现。
将区域划分为多个小单元,确定每个单元的节点和连接关系。
2. 建立有限元方程:根据电场的基本方程和有限元方法的原理,建立离散的数学方程。
在二维静电场问题中,通常使用拉普拉斯方程来描述电场分布。
将区域内的拉普拉斯方程离散化,得到线性方程组。
3. 求解方程:利用MATLAB中的矩阵运算和求解器,求解离散化得到的线性方程组,得到每个单元的电场分布。
4. 可视化结果:将计算得到的电场分布以图形的形式展现出来。
可以使用MATLAB的plot函数将电场的大小和方向以矢量图的形式展现出来,也可以使用contour函数将电场的等势线展现出来。
四、个人观点和理解通过编写二维静电场有限元程序,我进一步加深了对静电场和有限元方法的理解。
我也发现了MATLAB强大的数值计算和可视化功能,能够很好地帮助工程师和科研人员进行静电场分析和研究。
Matlab 有限元法计算分析程序编写
6) M函数文件 与命令文件不同,函数文件从外界只能看到传给它的输入 量和送出来的计算结果,而内部运作是看不见的。它的特 点是 (1)从形式上看,与命令文件不同,函数文件的第一行总是以 “function”引导的“函数申明行”。 (2)从运行上看,与命令文件运行不同,每当函数文件运行, MATLAB就会专门为它开辟临时工作空间,所有中间变量 都存放在函数工作空间中,当执行完文件最后一条指令和 遇到return时,就结束该函数文件的执行,同时该临时函数 工作空间及其所有的中间变量立即被清除。 (3)对于函数文件中的变量,如果不作特别说明,默认为临时 局部变量,这些临时变量就存放在函数的临时工作空间中, 当函数结束时他们被立即清除。与之相对应的是全局变量, 他们是通过global指令进行特别申明,这些全局变量可被几 个不同的函数共享。 • 函数文件的编辑也可用MATLAB editor/debugger。
有限元法计算分析程序编写
结构参数输入,包括
1)节点坐标值 2)单元类型以及连接信息 3)各单元的弹性模量、截面积(厚度)等 4)荷载形式以及作用位置、作用方向、荷载值 5)约束条件 6)输出信息
m j
对节点和单元分别编号 每个节点的自由度根据 节点号计算得到
i
y
o
x
计算结构的刚度矩阵
对各单元作如下的计算 a)计算单元刚度矩阵 b)计算坐标转换矩阵(如果需要) c)作坐标转换计算(如果需要) d)按自由度顺序叠加到总刚度矩阵中
MATLAB的使用方法
1) 最简单的计算器使用法 求[12+2×(7-4)]÷32的算术运算结果 (1)用键盘在MATLAB指令窗中输入一下内容 (12+2*(7-4))/3^2 (2)在上述表达式输入完成后,按【Enter】键,该指令被执行 (3)在指令执行后,MATLAB指令窗中将显示一下内容 ans = 2 [说明] 加 + 减 乘 * 除 / 或 \ (这两个符号对于数组有不同的含义) 幂 ^ “ans”是answer的缩写,其含义是运算答案,它是MATLAB的一个默 认变量
MATLAB有限元计算程序2

MATLAB有限元计算程序2function exam3_2% 本程序为第三章的第二个算例,采用平面梁单元计算斜腿刚架桥的变形和内力% 输入参数:无% 输出结果:节点位移和单元节点力% 检查数据文件是否存在file_in = 'exam3_2.dat' ;if exist( file_in ) == 0disp( sprintf( '错误:文件 %s 不存在', file_in ) )disp( sprintf( '程序终止' ) )return ;end% 读入模型,求解并显示结果PlaneFrameModel(file_in) ; % 定义有限元模型SolveModel ; % 求解有限元模型DisplayResults ; % 显示计算结果return ;function PlaneFrameModel( file_in )% 定义平面杆系的有限元模型% 输入参数:% file_in ------- 有限元模型数据文件% 返回值:% 无% 说明:% 该函数定义平面杆系的有限元模型数据:% gNode ------- 节点定义% gElement ---- 单元定义% gMaterial --- 材料定义,包括弹性模量,梁的截面积和梁的抗弯惯性矩% gBC1 -------- 第一类边界条件% gBC2 -------- 第二类约束条件, 处理铰接的结点global gNode gElement gMaterial gBC1 gBC2% 打开数据文件fid_in = fopen( file_in, 'r' ) ;% 读取节点坐标和节点温度node_number = fscanf( fid_in, '%d', 1 ) ;gNode = zeros( node_number, 3 ) ;for i=1:node_numberdummy = fscanf( fid_in, '%d', 1 ) ;gNode(i,:) = fscanf( fid_in, '%f', [1 3] ) ;end% 读取单元定义element_number = fscanf( fid_in, '%d', 1 ) ;gElement = zeros( element_number, 3 ) ;for i=1:element_numberdummy = fscanf( fid_in, '%d', 1 ) ;gElement(i,:) = fscanf( fid_in, '%d', [1 3] ) ;end% 读取材料性质material_number = fscanf( fid_in, '%d', 1 ) ;gMaterial = zeros( material_number, 5 ) ; for i=1:material_numberdummy = fscanf( fid_in, '%d', 1 ) ; gMaterial(i,:) = fscanf( fid_in, '%f', [1 5] ) ; end% 读取第一类约束条件bc1_number = fscanf( fid_in, '%d', 1 ) ; gBC1 = zeros( bc1_number, 3 ) ;for i=1:bc1_numbergBC1(i,1) = fscanf( fid_in, '%d', 1 ) ; gBC1(i,2) = fscanf( fid_in, '%d', 1 ) ; gBC1(i,3) = fscanf( fid_in, '%f', 1 ) ;end% 读取第二类约束条件bc2_number = fscanf( fid_in, '%d', 1 ) ; gBC2 = zeros( bc2_number, 3 ) ;for i=1:bc2_numbergBC2(i,:) = fscanf( fid_in, '%d', [1 3] ) ; end% 关闭数据文件fclose( fid_in ) ;returnfunction SolveModel% 求解有限元模型% 输入参数:% 无% 返回值:% 无% 说明:% 该函数求解有限元模型,过程如下% 1. 计算单元刚度矩阵,集成整体刚度矩阵% 2. 计算单元的等效节点力,集成整体节点力向量% 3. 处理约束条件,修改整体刚度矩阵和节点力向量% 4. 求解方程组,得到整体节点位移向量global gNode gElement gMaterial gBC1 gBC2 gK gDelta% step1. 定义整体刚度矩阵和节点力向量[node_number,dummy] = size( gNode ) ;gK = sparse( node_number * 3, node_number * 3 ) ;f = sparse( node_number * 3, 1 ) ;% step2. 计算单元刚度矩阵,并集成到整体刚度矩阵中[element_number,dummy] = size( gElement ) ;for ie=1:1:element_numberk = StiffnessMatrix( ie, 1 ) ; AssembleStiffnessMatrix( ie, k ) ;end% step3. 计算自重温度变化产生的等效节点力for ie=1:1:element_numberegf = EquivalentGravityForce( ie ) ;etf = EquivalentThermalForce( ie ) ;i = gElement( ie, 1 ) ;j = gElement( ie, 2 ) ;f( (i-1)*3+1 : (i-1)*3+3 ) = f( (i-1)*3+1 : (i-1)*3+3 ) + egf( 1:3 ) + etf( 1:3 );f( (j-1)*3+1 : (j-1)*3+3 ) = f( (j-1)*3+1 : (j-1)*3+3 ) + egf( 4:6 ) + etf( 4:6 );end% step4. 处理第二类约束条件,修改刚度矩阵和节点力向量。
matlab二维有限元编程
matlab二维有限元编程Matlab是一种常用的数学软件,广泛应用于科学计算和工程领域。
在有限元分析中,Matlab可以用来进行二维有限元编程,实现对复杂结构的力学行为进行模拟和分析。
本文将介绍如何使用Matlab进行二维有限元编程,并给出一些实例来说明其应用。
二维有限元编程是一种将连续的物理问题离散化处理的方法,通过将连续问题转化为离散的节点和单元来进行分析。
在Matlab中,我们可以使用网格生成工具来创建二维网格,然后将其转化为节点和单元的数据结构。
节点表示问题的离散点,而单元则表示节点之间的连接关系。
在二维有限元编程中,我们通常需要定义材料的性质、载荷条件和边界条件。
材料的性质可以包括弹性模量和泊松比等。
载荷条件可以包括集中力、分布力和压力等。
边界条件可以包括固支、自由支承和位移约束等。
在Matlab中,我们可以通过定义相应的矩阵和向量来表示这些条件。
接下来,我们需要根据节点和单元的数据结构建立刚度矩阵和载荷向量。
刚度矩阵描述了节点之间的刚度关系,而载荷向量描述了节点上的外力作用。
在Matlab中,我们可以使用循环和矩阵运算来建立这些矩阵和向量。
然后,我们可以通过求解线性方程组的方法来计算节点的位移和应力。
我们可以根据节点的位移和应力来进行结果的后处理。
后处理可以包括绘制位移和应力云图、计算节点和单元的应变能和应力分布等。
在Matlab中,我们可以使用绘图函数和计算函数来实现这些后处理操作。
下面是一个简单的例子来说明如何使用Matlab进行二维有限元编程。
假设我们要分析一个弹性材料的悬臂梁,在梁的一端施加一个集中力。
首先,我们需要定义材料的性质、载荷条件和边界条件。
然后,我们可以使用网格生成工具创建二维网格,并将其转化为节点和单元的数据结构。
接下来,我们可以建立刚度矩阵和载荷向量,并求解线性方程组得到节点的位移。
最后,我们可以进行结果的后处理,如绘制位移和应力云图。
Matlab提供了强大的工具和函数来进行二维有限元编程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%
% If hFrac is omitted, then hFrac(j) is taken to be 1 for
% each j.
%
% Certain data vectors are also updated for use with
% If requested, assign the old estimated errors
% and the diameters of the parent triangles to
% each triangle in the new mesh:
if nargin==7 && nargout>=2
% local error estimation and adaptive refinement.
% Input vectors are:
% esterrs: (Nt by 1) The estimated errors on each
% triangle in the mesh T.
function [T,esterrs0,d0]=LocalRefine1(T,TList,hFrac,esterrs0,esterrs,d0,d)
% [T1,esterrs1,d1]=LocalRefine1(T,TList,hFrac,esterrs,d0,d)
%
% This function performs a local refinement of the mesh
Nv=length(T.NodePtrs);
% Allocate the parameter arrays:
params.SubTriangles=[(1:Nt)',zeros(Nt,3)];
params.SuperTriangle=(1:Nt)';
params.SubEdges=zeros(Ne,3);
% must be updated:
esterrs0=esterrs0(params.SuperTriangle);
esterrs=esterrs(params.SuperTriangle);
esterrs0(j)=esterrs(params.SuperTriangle(j));
TList1=[TList1;k];
hFrac1=[hFrac1;(diams(i)/l)*hFrac(i)];
end
j=j+1;
if j<=4
k=abs(params.SubTriangles(TList(i),j));
%
% Output vectors:
% esterrs1: (Nt1 by 1) The estimated errors from the
% supertriangles of the triangles
% in the output mesh T1.
% d1: (Nt1 by 1) The diameters of the supertriangles
% of the triangles in the mesh T1.
% [T1,params]=LocalRefine1a(T,TList)
%
% This function performs a local refinement of the mesh T,
% refining each triangle whose index belongs to TList.
% T, refining each triangle whose index belongs to TList.
% Each T_i, i=TList(j), is refined until it is partitioned
% into subtriangles whose diameters are all less than
% d0: (Nt by 1) The diameters of the supertriangles
% of the triangles in the mesh T.
% d: (Nt by 1) The diameters of the triangles in T.
% an acceptable assignment of bases.
if ~isfield(T,'Bases')
T=DefineBases(T);
end
% Get the number of triangles and set the limit:
Nt=size(T.Elements,1);
% subedges of T.Edges(i). SubEdges(i,3) is the index, in
% T1.Nodes, of the midpoint of T.Edges(i).
Nt=size(T.Elements,1);
Ne=size(T.Edges,1);
if Nt1>=NtMax
done=1;
else
% Determine which triangles in T violate the bound:
n=length(TList);
TList1=[];
hFrac1=[];
% SuperTriangle(i) is the triangle in T containing
% triangle i from T1.
%
% SubEdges (Ne by 3):
% SubEdges(i,1:2) are the indices, in T1.Edges, of the two
NtMax=8*Nt;
done=0;
while ~done
% Refine the mesh:
diams=getDiameters(T,TList);
[T,params]=LocalRefine1a(T,TList);
Nt1=size(T.Elements,1);
for i=1:n
j=1;
k=abs(params.SubTriangles(TList(i),j));
while j<=4 & k~=0
l=getDiameter(T,k);
if l>(1+1e-7)*hFrac(i)*diams(i)
%
% params is a struct with the following fields:
%
% SubTriangles (Nt1 by 4):
% SubTriangles(i,:) lists the subtriangles of
% the ith triangle in T, and also of the triangles
% added to T to form T1 (a subtriangle of T can
% itself be subdivided); the subtriangles are
% triangles in T1.
%
% SuperTriangle (Nt1 by 1):
esterrs=[];
end
% Automatically define bases if necessary.
% Notice that DefineBases uses a heuristic
% algorithm that is not guaranteed to produce
% "help Mesh1".
%
% The algorithm is the recursive newest node bisection.
% This routine is part of the MATLAB Fem code that
% accompanies "Understanding and Implementing the Finite
% that triangle TList(j) is bisected in the course of
end
end
end
TList=TList1;
hFrac=hFrac1;
% Quit if all triangles are conforming:
if isempty(TList)
% Identify the triangles that resulted from a bisection:
j=find(params.SubTriangles(params.SuperTriangle,2)~=0);
% The old error estimate for the subdivided triangles
done=1;
end
end
end
return
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [T,params]=LocalRefine1a(T,TList)
d0=d0(params.SuperTriangle);
d=d(params.SuperTriangle);
d0(j)=d(params.SuperTriangle(j));