dl-14-1
三阳变牵引管施工方案

110KV三阳广场站变电所进线电力排管工程牵引管施工方案编制:复核:审核:审批:无锡市市政设施建设工程有限公司2011年8月12日目录第一章编制依据 (2)第二章工程概况 (3)2.1 工程概况 (3)2.2 管道牵引概况 (3)2.3工程地质、场地概况 (4)第三章施工准备 (8)3.1 项目管理组织机构 (8)3.2 技术准备 (8)3.3 现场准备 (9)3.3.1资料准备 (9)3.3.2材料准备 (9)3.3.3施工测量准备 (9)3.3.4施工机械的准备 (10)3.3.5劳动力的准备 (10)第四章施工总体方案 (11)4.1 工期目标 (11)4.2 施工要求 (11)4.3 施工总体部署 (11)4.4牵引管施工 (12)4.4.1施工方法 (13)4.4.2施工准备及测量放线 (14)4.4.3钻机安装与调试 (14)4.4.4泥浆制备 (15)4.4.5钻导向孔、扩孔 (15)4.4.6 管道焊接及回拖 (16)第五章监测方案 (18)5.1进行监测的主要技术依据 (18)5.2技术方案编制原则 (18)5.3监测项目和具体内容 (18)5.4监测点布置和埋设 (19)5.5监测仪器和监测方法 (19)5.6统计表 (20)5.7信息反馈 (20)第六章施工质量保证措施 (21)6.1 质量管理组织机构 (21)6.2工程质量目标 (21)6.3 工程质量检验制度 (21)6.4 施工质量保证措施 (22)6.5 施工阶段质量控制 (22)6.6 质量保证体系 (24)第七章施工进度保证措施 (25)第八章施工安全保证措施 (27)8.1 安全保证体系图 (27)8.2 安全保证措施 (27)8.2.1用电安全措施 (28)8.2.2机械安全措施 (28)8.2.3高处作业安全措施 (29)第九章现场文明施工保证措施 (30)第一章编制依据(1)110KV三阳广场站变电所进线电力排管工程施工招标文件(2)110KV三阳广场站变电所进线电力排管实施性施工组织(3)《110KV三阳广场站变电所进线电力排管施工图设计》(排管工程)(4)《埋地式高压电力电缆用氯化聚氯乙烯套管》(QB/T 2479-2005);(5)《城市桥梁工程施工与质量验收规范》CJJ2-2008;(6)《工程测量规范》GB50026-93;(7)《建设工程施工现场供用电安全规范》GB50194-93;(8)《建筑机械使用安全技术规程》JGJ33-86;(19)《施工现场临时用电安全技术规范》(JGJ46-88)(10)国家和无锡市现行有关工程施工和验收的标准、规范、规程、图集第二章工程概况2.1 工程概况110KV三阳广场站变电所位于后西溪北侧,中山路西侧,现状后西溪小学旁,110KV三阳广场站有两路110KV电源路径,第一路电源由220KV通德桥变(位于梁溪大桥东桥逸)提供,电缆线路穿越五爱路至健康路后,向东走线,至红星路后,接入现状电力排管再向北走线,穿越解放南路后,再沿健康路规划电力排管向北支后西溪,线路向东折转,最后接入三阳广场站。
14-1位移电流
14.1 位移电流
位移电流与传导电流的比较:
唯一的共同点仅在于都可以在空间激发磁场
本质不同 位移电流本质是变化着的电场,而传导电流则
是自由电荷的定向运动;
传导电流在通过导体时会产生焦耳热,而位移 电流则不会产生焦耳热,位移电流也没有化学 效应;
位移电流(变化着的电场)可以存在于真空、 导体、电介质中,而传导电流只能存在于导体 中。
dS
dq dt
14.1 位移电流
问题
对称性问题 变化的磁场能激发电场 变化的电场是否能激发磁场?
实验规律之间存在相互矛盾
14.1 位移电流
14.1.1 位移电流假设
一、安培环路定理遇到的问题
对稳恒电流的磁场H
安培环路定理 I: 传导电流
LH
dl
I
J
S
dS
J:曲面S上的传导电流密度
LH dl 2πrH
14.1 位移电流
H dl L
I
Id
两极板间没有传导电流
穿过闭合路径L的位移电流
Id
πr 2
Id πR2
q0
cost
r2 R2
2πrH
H
q0 cost
2πR2
r
B
0H
0q0 cost
2πR2
r
14.1 位移电流
I dQ S d
dt dt
平行板电容器极板间的电位移矢量D的大小 D =
极板间变化电场的方向和传导电流同向,因此
I = S dD dt
铜线鼻子规格及铜鼻子型号
线鼻子:铜鼻子又称线鼻子、铜接线鼻子、铜管鼻,接线端子等,各地方和各行业叫法不一。
是用于电线电缆连接到电器设备上的连接件,顶端这边为固定上螺丝边,末端为上剥皮后的电线电缆铜芯。
大于10平方的才使用铜鼻子,小于10平方的电线不使用铜鼻子,改用冷压线鼻。
铜鼻子有表面镀锡和不镀锡、管压式和堵油式之分。
主要适用范围:家用电器,电气业,机械设备厂,船厂,配电柜配电箱等。
产品外观规格良好,导电性能好,安全。
型号1:DT,是由T2铜棒做成,产品外貌为锅铲圆头,可用于密封堵油,顶端这边为固定上螺丝用,末端插进剥皮后的电缆用端子钳压紧即可。
型号1:DTG,是由T2铜管冲压而成,重量略轻于DT,在不需要密封堵油的连接时可代替DT。
做工比DT简单快速,价格也相对便宜。
DTL铜铝过渡接线鼻子用途: DTL系列铜铝接线端子适用于配电装置中各种圆型,半圆扇型铝线,电力电缆与电气设备铜端的过渡连接。
使用铝材为L3,铜材为T2。
产品采用磨擦焊工艺制造,具有焊缝强度高,通电性能好,抗电化腐蚀,使用寿命长等等特点。
DLT铝铜接线鼻子表面处理:常用的有两种,1.酸洗,酸洗过的颜色和红铜的本色基本相同,能起到美观抗氧化更利于导电。
2,镀锡,镀锡后的铜鼻子表面为银白色,能更好的防氧化和导电,并可防止铜在导电过成中产生的有害气体扩散。
安装注意事项:1、螺钉一定要拧紧。
2、电缆和铜鼻子一定要插到位并用钳子压紧。
铜鼻子规格及铜鼻子型号: 铜鼻子型号号及含意,比如:OT10-8, O是代表型号. T是代表材质。
10代表接线平方,(用与接8-10平方的线缆)。
-8代表螺钉孔径。
铜鼻子规格:0.5-8平方一般常用型号是OT,UT,RV,RNB,SNB,C45,SC等 10平方以上的铜鼻子常用型号是:DT,DTG,DL,DTL,SC,JM,JG,GT,GL等 1.25MM2,2MMW3.5MM2,5.5MM2,8MM2 10MM2,16MM2,25MM2,35MM2,50MM2,70M M2,95MMW,120MM2, 150MM2,150MM2,185MM2,240MM2,300MM2,400MM2,500MM2,630 MM2,800MM2 线鼻子常用开号有:DT,DTG, DTL1, DTL2 ,DL ,GTY ,GTL ,SC ,JG,JM,C45,OT, DIN ,AUS ,RV ,SV ,GTY ,BV ,FDD ,MDD ,VE ,EN,TE ,MPD ,FRD ,PBDD ,FDFD ,PTV 等铜鼻子规格及铜鼻子型号:铜鼻子型号号及含意,比如:OT10-8,O是代表型号.T是代表材质。
广日G12电梯控制系统调试手册
181********/16/2012编 号:SJG11-016版本号:01G12电梯控制系统调试手册编 制 潘 政校 对 李吴达标准化 黄展鹏审 定 夏嘉乐批 准 张 研广州广日电梯工业有限公司2012年 4月修改12-0285更改文件号 签字 日期 更改文件号 签字 日期1.2.2当G12控制系统增加微动平层功能时,需按下图安装隔磁板和光电开关,在平层位置时,MQG、MQ1、MQ2均插入在隔磁板的正中间。
注:SQG、MQG、XQG 光电开关插入隔磁板后是常开状态,MQ1、MQ2光电开关插入隔磁板后是常闭状态。
二、慢车、快车调试说明2.1现场调试准备2.1.1首先检查是否具备调试条件:1)用户有否按要求将电源提供到机房(正常或临时); 2)主机加油量是否合适,型号是否正确; 3)底坑缓冲器安装完成否;4)各层厅门、门锁是否安装完毕; 5)电梯接线是否已全部完成; 6)机房线槽是否已上好盖;7)井道引线的金属软管是否固定良好; 8)各层厅门门套是否已塞好;9)井道有否妨碍轿厢、对重架运行的物体; 2.1.2电气接线检查2.1.2.1机房电气接线检查 序号 检查的回路 测试点 测试标准方法1 盘车手轮开关 F8-1、F8-2正常为ON 用万用表测量测试点的阻值(ON 约为0Ω,OFF 为>0.5M Ω)2 底坑检修箱急停底坑入口箱急停F14-2、F14-3正常为ON 3 下极限限速器断绳开关 缓冲器F5-1、F5-3正常为ON 4 限速器开关 F8-3、F8-4 正常为ON 5 上极限 F6-1、F6-2 正常为ON 6 轿厢急停 F1-7、F1-8 正常为ON7 轿门锁 F1-8、F1-9 正常为ON8 厅门开关 F9-2、F9-3 所有厅门关上时为ON9限位开关上 F6-3、F6-5 打板未打到开关时开关状态为ON下F5-4、F5-5 10强迫减速开关上 SHK F6-3、F6-6SHK1F6-3、F6-7SHK2 F6-3、F6-8 下 XHK F5-4、F5-6XHK1F5-4、F5-7 XHK2 F5-4、F5-811消防开关 F9-4、F9-5 正常为OFF 12 照明AC220V F1-1、F1-3 接线正常 13 门机电源AC220V F1-4、F1-5接线正常 14 抱闸反馈开关F7-1、F7-2F7-4、F7-5抱闸合上时为ON15抱闸线圈KA-9、KA-10KA-10接抱闸线圈的正端,KA-9接抱闸线圈的负端 用万用表测量测试点的阻值2.1.2.2轿顶电气接线检查序号 检查回路 测试端子 测试标准 方法 1 主门轿门锁 D7-2、D7-3 主门轿门关上时ON 用手查线,用万用表测量2 副门轿门锁(若有) D8-2、D8-3 副门轿门关上时ON 3 安全钳开关 D5-1、D5-2 正常时ON 4 安全窗开关(若有) D6-1、D6-2 正常时ON5门区感应器装置 D9-1、D9-2、D9-3 用手查线微动平层装置(若有) D9-4、D9-5、D9-6D、9-7 用手查线6 主门安全触板开关 左 DL-14、DL-4常闭右 DL-4、DL-57 副门安全触板开关 (若有) 左DL-14、DL-7 常闭右 DL-7、DL-88 主门光电开关(若有) DL-15、DL-10、DL-5、DL-6用手查线 9 副门光电开关(若有) DL-15、DL-10、DL-8、DL-9用手查线 10 轿厢照明 D4-1、D4-2 至LED 灯 11 停电应急照明 D4-3、D4-4 至停电应急照明灯 12 轿厢风扇 D3-1、D3-2 至风扇 13 主门门机电缆 D1 用手查线 14 副门门机电缆 D2 用手查线 15 主门光幕 D12、D13 用手查线 16 副门光幕 D14、D15 用手查线 2.1.2.3轿厢通信板接线检查在安装小组确认插接电缆C1、C2、C3、C4、C5连接正确,用万用表在轿顶对各控制总线的接线进行测量。
大学物理习题解答5第五章稳恒电流 (1)
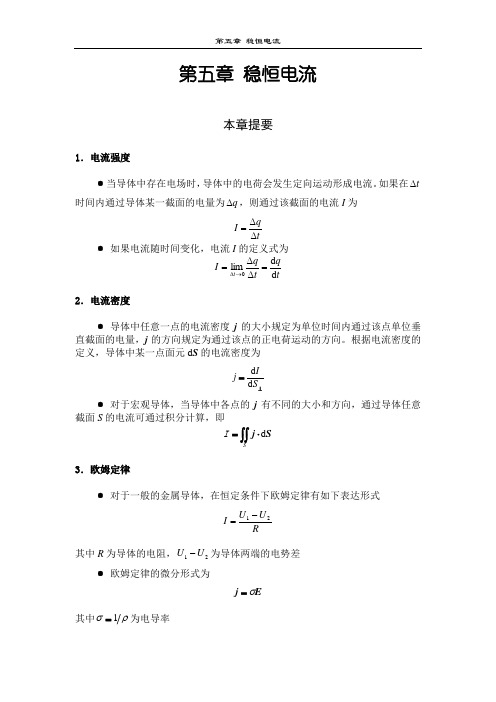
第五章 稳恒电流本章提要1.电流强度· 当导体中存在电场时,导体中的电荷会发生定向运动形成电流。
如果在t ∆时间内通过导体某一截面的电量为q ∆,则通过该截面的电流I 为qI t∆=∆ · 如果电流随时间变化,电流I 的定义式为tqt q I t d d lim 0=∆∆=→∆2.电流密度· 导体中任意一点的电流密度j 的大小规定为单位时间内通过该点单位垂直截面的电量,j 的方向规定为通过该点的正电荷运动的方向。
根据电流密度的定义,导体中某一点面元d S 的电流密度为d d Ij S ⊥=· 对于宏观导体,当导体中各点的j 有不同的大小和方向,通过导体任意截面S 的电流可通过积分计算,即d j S S=⋅⎰⎰I3.欧姆定律· 对于一般的金属导体,在恒定条件下欧姆定律有如下表达形式RU U I 21-=其中R 为导体的电阻,21U U -为导体两端的电势差· 欧姆定律的微分形式为E j σ=其中ρσ1=为电导率4.电阻· 当导体中存在恒定电流时,导体对电流有一定的电阻。
导体的电阻与导体的材料、大小、形状以及所处状态(如温度)有关。
当导体的材料与温度一定时,对一段截面积均匀的导体,其电阻表达式为Sl R ρ= 其中l 为导体的长度,S 为导体的横截面积,ρ为导体的电阻率5.电动势· 非静电力反抗静电力移动电荷做功,把其它种形式的能量转换为电势能,产生电势升高。
qA 非=ε· 当非静电力不仅存在于内电路中,而且存在于外电路中时,整个回路的电动势为l E lk ⎰⋅=d ε6.电源电动势和路端电压· 若电源正负极板的电势分别为U +和U -,电源内阻为r ,电路中电流为I ,则电源电动势为()U U Ir +-ε=--· 路端电压为Ir U U -=--+ε7.接触电动势· 因电子的扩散而在导体接触面上形成的等效电动势。
ZW27-12(G) 型户外高压真空断路器 说明书
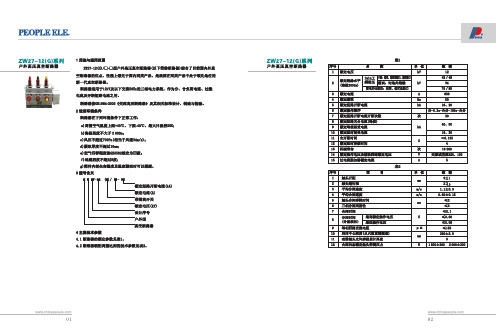
序号 名称单位 数据 123456789 10 11 12 13 14 15额定电压kV12 额定绝缘水平(海拔2000m)1min工频耐压 干试:相间、相对地断口、隔离断口 湿试:对地外绝缘 雷电冲击耐压:相间、相对地断口42/48 34 75/85 额定电流 A 630额定频率Hz 50 额定短路开断电流 kA 16、20额定操作顺序分-0.3s-合分-180s-合分额定短路开断电流开断次数 次 30 额定短路关合电流(峰值)额定峰值耐受电流 40、50额定短时耐受电流 16、20全开断时间 S <0.125额定短时持续时间 4 机械寿命10 000额定操作电压及辅助回路额定电压 V 交流或直流220、100过电流脱扣器额定电流 A5表1表2kVkA 次 123456789 10 11 12序号 单位 数据 项目触头开距 mm 9±1触头超行程 +13-0.3平均分闸速度 m/s 1.1±0.3平均合闸速度 0.65±0.15触头合闸弹跳时间 ms≤2 三相分闸同期性 合闸时间 ≤0.1分闸时间(分励脱扣)最高额定操作电压 最低操作电压S ≤0.06 ≤0.08 每相回路直流电阻μΩ ≤150相间中心距离(从灭弧室端测量) 240±2.0动静触头允许磨损累计厚度 3合闸状态额定触头弹簧压力N1 800±2002 000±200mm ≤2m/s 1 用途与适用范围ZW27-12(G)/□-□型户外高压真空断路器(以下简称断路器)综合了目前国内外真空断路器的优点,性能上领先于国内同类产品,是我国在同类产品中处于领先地位的新一代真空断路器。
断路器适用于12kV 及以下交流50Hz 的三相电力系统,作为分、合负荷电流、过载电流及开断短路电流之用。
断路器按GB1984-2003《交流高压断路器》及其相关标准设计、制造与检验。
2 使用环境条件断路器在下列环境条件下正常工作:a)周围空气温度上限+40℃,下限-40℃,最大日温差25K ; b)海拔高度不大于2 000m;c)风压不超过700Pa(相当于风速34m/s); d)覆冰厚度不超过10mm ;e)空气污秽程度按GB5582规定为Ⅲ级; f)地震烈度不超过8度;g)箱体内部在高湿度及温度骤变时可以凝露。
一、设备主要功能
目录一、设备主要功能: (2)二、适用范围及特点: (2)1、使用范围: (2)2、功能特点: (2)三、安装原理图: (3)四、设备外观说明: (4)五、安装说明: (4)1、选材料建议: (5)2、安装可能遇到的问题: (5)3、ATT控制: (5)六、技术指标: (7)七、维修与退换:: (8)八、法律责任: (8)九、设备装箱清单: (8)一、设备主要功能:手机信号放大器专用于小区域室内无线信号放大(又称定点覆盖),作用是将基站的信号通过无线接入方式直接引入到室内的覆盖区域,再通过小型天线将基站信号发送出去,同时接收手机信号,通过分布系统上行到基站,能有效消除室内盲区,抑制干扰,为室内的移动通信用户提供稳定、可靠的信号,使用户在室内也能享受高质量的个人通信服务。
信号增强器主要应用于室内小区域覆盖,覆盖室内移动通信盲区,覆盖效果达到边缘场强-80dBm以上。
二、适用范围及特点:1、适用范围:(所有室内信号不好,室外能正常通话的信号的区域)a 、微小区域的信号盲区或弱信号区,如地下或半地下营业场所,小型地下室、地下停车场等。
b、小型热点信号投诉区,如会议室、小超市、小商场、写字间、小型公共区域等。
c、话务量和社会影响力大的区域,如酒吧、网吧、歌舞厅、咖啡厅、健身俱乐部、休闲娱乐场所等。
d、电梯,特别是电梯井内不方面布设线缆的电梯。
e、家庭、办公、豪华游艇、私车、公安系统与公路安全管理等等。
2、功能特点a、安装方便:根据信号灯的指示安装。
b、性能稳定:上下行都带自动增益控制(ALC)电路,满功率输出后室外信号再增加约20dBm,主机同样最佳状态工作。
c、干扰相对小:保证满格信号能打电话。
d、开通后无需对原系统和基站参数进行调整。
e、稳定可靠的电磁兼容设计。
f、高增益的线性功率放大器。
g、散热有效合理,结构美观,体积适宜。
三、安装原理图:低噪隔离器 滤波器功放双功器双功器 功放隔离器低噪ALCALC 下行电路上行电路 施主天线 重发天线隔离器隔离器滤波器Signal RepeaterPOWERUL/P DL/P四、设备外观说明:(SR-14,SR-20,SR-25系列)(S R-27系列)①: UL/P 上行指示灯( 红色)安装正确时不亮,手机工作时闪烁。
电梯井及楼梯井混凝土施工方案
目录1工程概况 (1)1.1概况 (1)1.2施工主要工程量 (1)2编制依据 (2)2.1施工图及文件 (2)2.2规范及标准 (2)3施工进度计划 (2)4施工布置 (4)4.1施工道路布置 (4)4.2施工水、电布置 (4)4.2.1施工用电 (4)4.2.2施工用水 (4)4.3混凝土施工主要设备布置 (4)4.4施工照明布置 (5)5施工方法 (5)5.1电梯井、楼梯井混凝土浇筑分层 (5)6电梯井、楼梯井混凝土浇筑施工 (6)6.1电梯井、楼梯井基础清理 (6)6.2钢筋制安 (6)6.3模板施工 (7)6.3.1电梯井、楼梯井边墙模板施工 (7)6.3.2电梯井、楼梯井联系隔板及牛腿模板施工 (8)6.3.3楼梯平台板及楼梯模板施工 (8)6.3.4电梯前厅平台模板施工 (8)6.3.5电梯井、楼梯井EL813.2m、EL821.3m高程交通廊道模板施工 (9)6.4混凝土浇筑施工 (9)6.4.1电梯井、楼梯井边墙混凝土施工 (9)6.4.2电梯井、楼梯井联系隔板、楼梯平台板、电梯前厅平台混凝土施工 (10)6.4.3电梯井、楼梯井EL813.2m、EL821.3m廊道混凝土施工 (10)6.4.4混凝土振捣施工 (10)6.4.5施工缝处理 (11)6.5模板拆除 (11)6.6混凝土养护 (11)7设备及劳动力计划 (12)7.1施工设备配置 (12)7.2主要劳动力配置 (12)7.3主要材料计划 (13)8质量、安全及环境保护措施 (13)8.1施工质量保证措施 (13)8.2安全保证措施 (15)8.3文明施工措施 (16)1工程概况1.1概况善泥坡水电站位于北盘江干流中游河段贵州省六盘水市水城县顺场乡境内,距贵阳362km。
电站水库正常蓄水位885m,总库容0.850亿m3,电站装机容量185.5MW,工程为III等工程,工程枢纽主要由碾压混凝土拱坝、坝身泄洪系统、右岸引水系统及地下厂房和小机组引水发电系统等组成。
铜线鼻子规格及铜鼻子型号-铜线跟铜鼻子对照表

线鼻子:之马矢奏春创作铜鼻子又称线鼻子、铜接线鼻子、铜管鼻,接线端子等,各地方和各行业叫法纷歧。
是用于电线电缆连接到电器设备上的连接件,顶端这边为固定上螺丝边,末端为上剥皮后的电线电缆铜芯。
大于10平方的才使用铜鼻子,小于10平方的电线不使用铜鼻子,改用冷压线鼻。
铜鼻子有概况镀锡和不镀锡、管压式和堵油式之分。
主要适用范围:家用电器,电气业,机械设备厂,船厂,配电柜配电箱等。
产品外观规格良好,导电性能好,平安。
型号1:DT,是由T2铜棒做成,产品外貌为锅铲圆头,可用于密封堵油,顶端这边为固定上螺丝用,末端插进剥皮后的电缆用端子钳压紧即可。
型号1:DTG,是由T2铜管冲压而成,重量略轻于DT,在不需要密封堵油的连接时可代替DT。
做工比DT简单快速,价格也相对廉价。
DTL铜铝过渡接线鼻子用途:DTL系列铜铝接线端子适用于配电装置中各种圆型,半圆扇型铝线,电力电缆与电气设备铜端的过渡连接。
使用铝材为L3,铜材为T2。
产品采取磨擦焊工艺制造,具有焊缝强度高,通电性能好,抗电化腐蚀,使用寿命长等等特点。
DLT铝铜接线鼻子概况处理:经常使用的有两种,1.酸洗,酸洗过的颜色和红铜的赋性基底细同,能起到美观抗氧化更利于导电。
2,镀锡,镀锡后的铜鼻子概况为银白色,能更好的防氧化和导电,并可防止铜在导电过成中发生的有害气体扩散。
装置注意事项:1、螺钉一定要拧紧。
2、电缆和铜鼻子一定要插到位并用钳子压紧。
铜鼻子规格及铜鼻子型号: 铜鼻子型号号及含意,比方:OT10-8, O是代表型号. T是代表材质。
10代表接线平方,(用与接8-10平方的线缆)。
-8代表螺钉孔径。
铜鼻子规格:0.5-8平方一般经常使用型号是OT,UT,RV,RNB,SNB,C45,SC 等10平方以上的铜鼻子经常使用型号是:DT,DTG,DL,DTL,SC,JM,JG,GT,GL等 1.25MM2,2MMW3.5MM2,5.5MM2,8MM2 10MM2,16MM2,25MM2,35 MM2,50MM2,70MM2,95MMW,120MM2, 150MM2,150MM2,185MM2,240M M2,300MM2,400MM2,500MM2,630MM2,800MM2 线鼻子经常使用开号有:DT,DTG,DTL1,DTL2 ,DL ,GTY ,GTL ,SC ,JG,JM,C45,OT,DIN ,AUS ,RV ,SV ,GTY ,BV ,FDD ,MDD ,VE ,EN,TE ,MPD ,FRD ,PBDD ,FDFD ,PTV 等铜鼻子规格及铜鼻子型号:铜鼻子型号号及含意,比方:OT10-8,O是代表型号.T是代表材质。
一种具有发育机制的感知行动认知模型
第47卷第2期自动化学报Vol.47,No.2 2021年2月ACTA AUTOMATICA SINICA February,2021一种具有发育机制的感知行动认知模型张晓平1阮晓钢2王力1李志军1闫佳庆1毕松1摘要针对结构固定认知模型中存在的学习浪费与计算浪费问题,在具有内发动机机制的感知行动认知模型基础上,根据操作条件反射学习特性,借鉴潜在动作原理,建立起一种具有发育机制的感知行动认知模型D-SSCM(Development-sensorimotor cognitive model),具体为一个14元组,包含离散学习时间集、内部可感知离散状态集、可输出动作集、有效输出动作空间集、潜在动作关系集、可输出动作空间探索率集及发育算法等.针对模型发育过程,分别设计了模型结构扩展式发育方法和算法以及缩减式发育方法和算法,定义了模型的发育式学习过程.使用两轮机器人自平衡任务对设计的学习模型进行验证,实验结果表明,发育机制下的感知行动认知模型D-SSCM具有更快的学习速度及更稳定的学习效果.关键词发育,操作条件反射,潜在动作,感知行动认知,两轮机器人引用格式张晓平,阮晓钢,王力,李志军,闫佳庆,毕松.一种具有发育机制的感知行动认知模型.自动化学报,2021,47(2): 391−403DOI10.16383/j.aas.c180750A Kind of Sensorimotor Cognitive Model With Developmental MechanismZHANG Xiao-Ping1RUAN Xiao-Gang2WANG Li1LI Zhi-Jun1YAN Jia-Qing1BI Song1Abstract Aiming at the problems of learning waste and computing waste that exist in the cognitive models withfixed structure,and according to the operate conditioning learning characteristics as well as drawing on the affordance theory, a new kind of sensorimotor cognitive model named D-SSCM with the developmental mechanism is established based on the sensorimotor cognitive model with the mechanism of intrinsic motivation.D-SSCM is a fourteen tuple in specific, including discrete learning time set,internal sensible discrete state set,optional motion set,effective output motion space set,affordance relationship set,optional motion space exploration rate set,developmental algorithm and etc.In view of D-SSCM s developmental learning,extended developmental method and algorithm as well as reduced developmental method and algorithm are designed.Model s developmental learning process is defiing two-wheeled robot self-balancing task to test this designed model,results show that D-SSCM is with faster learning speed and more stable learning effect. Key words Development,operant conditioning,affordance,sensorimotor cognitive,two-wheeled robotCitation Zhang Xiao-Ping,Ruan Xiao-Gang,Wang Li,Li Zhi-Jun,Yan Jia-Qing,Bi Song.A kind of sensorimotor cognitive model with developmental mechanism.Acta Automatica Sinica,2021,47(2):391−403近年来,人工智能与机器人在各国政府、研究机构及相关企事业单位中的受重视程度持续提升,其中主要研究目标之一是建立类似人或动物可以进行收稿日期2018-11-11录用日期2019-06-02Manuscript received November11,2018;accepted June2,2019北京市自然科学基金(4204096,4184086),国家自然科学基金(61903006,61174116),北京市教委项目(KM201610009001),北京高校高精尖学科建设项目,北方工业大学青年毓优人才项目,北方工业大学科研启动基金项目资助Supported by Beijing Natural Science Foundation(4204096, 4184086),National Natural Science Foundation of China (61903006,61174116),Beijing Education Commission Project (KM201610009001),Beijing Universities Top Discipline Con-struction Project,Youth Yuyou Talent Project of North China University of Technology,Research Initial Foundation of North China University of Technology本文责任编委张俊Recommended by Associate Editor ZHANG Jun1.北方工业大学电气与控制工程学院北京1001442.北京工业大学信息学部北京1001241.School of Electrical and Control Engineering,North China University of Technology,Beijing1001442.Faculty of In-formation Technology,Beijing University of Technology,Beijing 100124自主学习的认知型机器人.机器人具有认知能力表现为其能够在与周身环境的交互过程中渐进掌握知识和技能[1].受人和动物感知运动系统的启发[2],为机器人感知运动过程设计认知模型成为实现认知机器人的有效方法之一[3−5].机器人感知行动认知模型的设计主要包含模型结构及模型算法两方面.模型结构常借鉴神经生物学相关知识[6−8],而算法方面则以心理学学习机制为指导,常见的有操作条件反射[9−11]、内发动机[12]等,其中,内发动机又涉及好奇心[13−14]、情感[7,15]等.在操作条件反射学习理论下,Cyr等基于人工脉冲神经网络ASNN(Artificial spiking neural networks)为机器人设计了一种大脑控制器,实现了机器人自主移动[10];Itoh等为类人机器人设计了一种行为模型,成功实现了机器人握手行为学习[11].在内发动机理论下,Ren等借鉴多巴胺、丘脑、基底神经节–大脑皮层工作机制,针392自动化学报47卷对两轮机器人自平衡学习问题提出一种计算模型C-DCCM(Curiosity-driven cognitive computing model),成功实现了机器人的自学习和对环境的自发探索[6];Mannella等为平面机器人提出一种计算模型,实现了机器人自身运动技能学习[12];Baranes 和Oudeyer将感知运动理论与内发动机理论结合,提出一种自适应目标生成–鲁棒智能自适应好奇心算法SAGG-RIAC(Self-adaptive goal generation-robust intelligent adaptive curiosity),实现了冗余机器人对自身逆运动学的学习[13−14];Castellanos 等则考虑机器人感知行动认知过程中的情感因素,为机器人提出一种情感评估模型,实现了机器人的个性化[15].以上工作,机器人在学习过程中,其认知模型算法会在一定程度上进行更新,但模型结构均为固定,一旦设计完成,不再发生变化.2001年,Weng在Science上发文,首次提出自主心智发育的概念[16],后期继续提出一系列发育网络DN(Development networks)理论[17],奠定了发育机器人研究基础,其发育网络核心理念就在于学习过程中网络结构可变.Cai等以学习自动机为数学模型,结合操作条件反射机制与模糊理论设计的模糊斯金纳操作条件反射自动机FSOCA(Fuzzy skinner operant conditioning automaton)就融合了这样的思想,基于在线聚类算法实现了感知行动映射规则的增加和删除[9].发育理念对于机器人学习非常重要,以文献[18]为例,其在感知运动系统认知模型中同时结合操作条件反射与内发动机机制,为两轮机器人设计了一种具有内发动机机制的认知模型,使得机器人表现出一定的认知能力,然而,其模型结构固定,研究过程中表现出两个问题:1)模型需要学习的动作空间需要提前定义,降低了机器人的智能性,并且固定的动作学习空间存在大量对无效感知行动映射的探索和学习,造成学习的浪费,导致模型学习率低;2)固定感知行动映射空间下,模型需要对当前学习状态下所有的感知行动映射取向性进行更新,存在计算上的浪费.受发育理论启发,本文在文献[18]的研究基础上,借鉴潜在动作理论,设计了一种新的结构可发育的机器人感知行动认知模型D-SSCM,针对模型的发育式学习过程,分别设计了模型扩展式学习方法和算法以及缩减式学习方法和算法,同时节省了机器人学习成本和计算成本,很大程度上提高了机器人的学习速度和学习稳定性.将文本模型与文献[18]在相同实验任务及参数设置下进行对比,对本文模型的特点及上述优越性进行了说明和验证.1潜在动作理论潜在动作(Affordance)理论由美国感知心理学家Gibson于1977年提出,认为婴儿在环境学习过程中,首先学习的是物体的潜在动作,如箱子“可堆积”、椅子“可坐”等,之后才学习物体颜色、大小等属性[19].21世纪,潜在动作理论被引入发育机器人研究领域[20],对此,欧盟还成立了专门的研究项目[21],RSS、ECCV等会议也举办了相关的Workshop[22].国内有关潜在动作的相关研究主要来自华南理工大学易长安等的工作[23−25].潜在动作理论重点研究机器人与环境之间可能的动作关联,从而实现机器人完成不同的任务.1.1潜在动作定义潜在动作理论自提出以来,各学者对其理解不一,Turvey将潜在动作定义为环境的属性[26];在Turvey理论基础上,Stoffregen认为潜在动作是存在于动物–环境系统中的某种属性[27];Chemero认为潜在动作是动物属性与环境属性之间的关联[28]; Steedman忽略感知作用,将潜在动作理解为环境与动作的关联[29];2015年,易长安等指出,潜在动作是指机器人结合自身行为能力及感知能力,判断其在当前环境下可执行的动作[30].机器人在与环境的交互过程中逐渐学习到不同环境中的潜在动作,从而完成不同的任务,并在任务学习过程中不断提高自身行为学习能力.由此可见,潜在动作是机器人学习到的关于其周身环境的知识,是机器人获得高级技能的重要基础,它能够使机器人预测动作结果,实现高效率的学习[31].1.2潜在动作形式化2007年,Sahin等[32]总结潜在动作相关知识,定义潜在动作是效果和(实体,行为)组之间的关系,并给出了潜在动作学习的形式化,具体为一个三元组,如式(1)所示,为广大学者所采用.式(1)具体表示当智能体对实体(entity)执行行为(behavior)后,产生效果(effect).(effect,(entity,behavior))(1) 2015年,易长安等对Sahin等的潜在动作学习模型进行扩展,针对动态环境下的复杂任务,提出了基于子任务的潜在动作描述方法[30],如式(2)所示,其中precondition表示动作执行前环境需要满足的前置条件,postcondition表示动作执行完成后环境需满足的后置条件.在该模型之上,易长安等提出潜在动作预测框架,集成了分层强化学习、状态抽象机制、任务图和物体属性等,提高了机器人学习效率.Affordance:(subtask,action,precondition,postcondition)(2)2期张晓平等:一种具有发育机制的感知行动认知模型393机器人与环境的每次交互都可以产生一个潜在动作元组,多次交互可以得到更一般的关联,从而完成更复杂的任务.2具有发育机制的感知行动认知模型2.1模型结构本文在文献[18]的基础上,结合潜在动作理论,为机器人设计了一种结构可变的具有发育机制的感知行动认知模型D-SSCM (Development-sensorimotor cognitive model),其结构如图1所示,包含离散学习时间集t 、内部可感知离散状态集S 、可输出动作集M 、有效输出动作空间集M s 、有效感知行动映射取向性集O s 、有效感知行动映射学习次数集N s 、有效感知行动映射好奇心集C s 、状态评价函数V 、取向函数V s 、有效操作函数集P s 、有效动作空间取向性学习算法L s 、潜在动作关系集AF 、可输出动作空间探索率集Exp 以及发育算法DL 共14部分(下标s 表示感知sensory,后文下标m 表示运动motor).图1D-SSCM 结构图Fig.1Structure of D-SSCM为更清楚地显示D-SSCM 中各元素的含义,给出如下定义:定义1.具有发育机制的感知行动认知模型D-SSCM 是一个14元组:D-SSCM = t ,S ,M ,M s ,O s ,N s ,C s ,V ,V s ,P s ,L s ,AF ,Exp ,DL ,其中各元素含义具体如下:1)t ∈{0,1,···,n t }:D-SSCM 离散学习时刻集,其中t =0表示学习初始时刻,n t 表示最大离散学习时刻数;2)S ={s i |i =1,2,···,n s }:D-SSCM 内部可感知离散状态集,其中s i ∈S 表示模型第i 个可感知的内部状态,n s 为离散状态数;3)M ={m j |j =1,2,···,n m }:D-SSCM 可输出动作集,m j 表示可输出动作集中第j 个动作,n m 为动作空间可输出动作数;4)M s ={M i |i =1,2,···,n s }:D-SSCM 有效输出动作空间集,M i ={m ik |k =1,2,···,n i }为状态s i 下的有效输出动作空间,m ik ∈M 为D-SSCM 在状态s i 下从M 中学习到的第k 个有效动作,n i 为状态s i 下学习到的有效动作个数.状态s i 下的有效输出动作指的是该状态下能够使机器人趋向任务目标的动作,M i 是在机器人对环境的学习过程中不断构建的,随着M i 结构的不断变化,n i 也随之发生变化,体现出模型发育的思想.学习初始时刻,M i (i =1,2,···,n s )均为空,n i =0(i =1,2,···,n s );不同于文献[18]中所设计模型需要学习的动作空间固定,在D-SSCM 中各状态s i 所对应的动作空间M i 并非教师或专家根据经验提前定义的,而是随着学习过程渐进发育形成的,该模式下,有效避免了冗余感知行动映射造成的学习浪费和计算浪费.5)O s ={O i |i =1,2,···,n s }:D-SSCM 有效感知行动映射取向性集,其中O i ={o ik |k =1,2,···,n i }为状态s i 下的有效感知行动映射取向性集,o ik 为状态s i 对其第k 个有效动作的选择取向性;6)N s ={N i |i =1,2,···,n s }:D-SSCM 有效感知行动映射学习次数集,N i ={n ik |k =1,2,···,n i }为状态s i 下模型对其各有效动作的学习次数集,n ik 表示状态s i 对动作m ik 的学习次数,若t 时刻,m ik 被选择,则t +1时刻:n ik (t +1)=n ik (t )+1(3)对于其他所有没有被学习的有效感知行动映射,对应学习次数保持不变;7)C s ={C i |i =1,2,···,n s }:D-SSCM 有效感知行动映射好奇心集,C i ={c ik |k =1,2,···,n i }为状态s i 下模型对其各有效动作的好奇心集,c ik 表示状态s i 对动作m ik 的好奇度,计算方式同文献[18],具体为:c ik =11+e k c (n ik −c )(4)其中,k c 和c 为好奇心参数;8)V :D-SSCM 状态评价函数,用来评价模型当前感知状态的理想程度,机器人越接近学习目标,模型对应感知状态的状态值越大,机器人越远离学习目标,则模型对应感知状态的状态值越小;9)V s :D-SSCM 取向函数,用于决定模型学习394自动化学报47卷方向,定义为:V s(t+1)=V(t+1)−V(t)(5)10)P s={P i|i=1,2,···,n s}:D-SSCM有效操作函数集,用于决定模型在有效动作空间内对动作的选择,P i={p ik|k=1,2,···,n i}为状态s i所对应的有效操作函数集,p ik为状态s i对动作m ik的操作值,具体为:p ik=σo ik+(1−δ)c ik(6)0<σ<1为操作函数参数.11)L s:D-SSCM有效动作空间取向性学习算法,在D-SSCM有效动作空间内各动作均能使得V s(t+1)≥0,因此针对有效动作空间的取向性学习算法L s简单设计为:L s:o ik(t+1)=o ik(t)+o ik(t)×(1−e−η×V s(t+1))1+o ik(t)×(1−e−η×V s(t+1))o ik (t+1)=o ik (t)1+o ik(t)×(1−e−η×V s(t+1))(7)其中o ik(k∈1,···,n i)对应被选动作m ik的取向性值,o ik 为状态s i下其余动作的取向性值,η为取向性学习算法参数.12)AF={AF ij|i=1,2,···,n s,j= 1,2,···,n m}:D-SSCM潜在动作关系集,受潜在动作理论及其形式化启发,在此定义D-SSCM不同状态与不同动作之间的潜在关系,具体定义为一个三元组:AF ij:(effect,(s i,m j))(8) AF ij意义为D-SSCM在状态s i下输出m j产生的效果为effect.D-SSCM在对可输出动作空间进行探索时,每探索一个新的感知行动映射(s i,m j),就会伴随着一个新的潜在动作关系组形成.针对D-SSCM发育式学习过程:若effect=1,表示在感知状态s i下动作m j 是可被选择的,即动作m j是状态s i下的有效动作;若effect=0,表示在状态s i下,动作m j是不可取的,会使得学习偏离目标;若effect值为空,即effect=∅,则表示对应的感知行动映射还没有被学习.依据操作条件反射机制及定义的取向函数, effect值计算如下:effect=1,V s≥00,V s<0(9)13)Exp={Exp i|i=1,2,···,n s}:D-SSCM 可输出动作空间探索率集,Exp i表示模型在状态s i 下对可输出动作空间M的探索率,可通过式(10)进行计算:Exp i=Num i{effect=∅}n m(10)其中,Num i{effect=∅}=n m−Num i{effect=∅}表示状态s i下可输出动作空间中潜在动作关系元组effect=∅的个数,亦即状态s i对可输出动作空间已经进行探索的感知行动映射数.D-SSCM中,在任意状态s i下,模型都可以选择对该状态下已发育形成的有效输出动作空间集M i进行学习,或对该状态下可输出动作空间M的剩余空间进行探索.在此规定,D-SSCM学习过程中,在状态s i下模型总是以概率1−Exp i对M剩余空间进行探索,以概率Exp i对其有效输出动作空间M i进行学习.特别地:a)在学习初始时刻t=0时,模型没有任何环境知识,任意状态s i下,其潜在动作关系元组AF ij(j=1,2,···,n m)中effect值均为∅,M i也为∅,此时D-SSCM以1−Exp i=1−Num i{effect=∅}n m=1−n m=1(11)的概率从可输出动作空间集M中探索动作,以完成对M i的构建.b)当学习进行到某个时刻,若状态s i已经完成了对可输出动作空间M的全部探索,则D-SSCM 在该状态下继续对M进行探索的概率为:1−Exp i=1−Num i{effect=∅}n m=1−n mn m=0(12)表明此时模型不再会对M进行探索.14)DL:D-SSCM发育算法,包含DL1和DL2两部分,其中DL1为D-SSCM探索可输出动作空间M后需要对有效输出动作空间集M s进行扩展的发育算法,DL2是D-SSCM对有效输出动作空间集M s不断学习后需要对其进行缩减的发育算法.2.2发育算法设计及分析2.2.1扩展发育算法DL1在状态s i下,若D-SSCM以概率1−Exp i对可输出动作集M剩余动作空间进行了探索,可能出现两种情况:1)t时刻在当前状态下探索某一动作后,t+1时刻模型受到负强化V s(t+1)<0,则对应感知行2期张晓平等:一种具有发育机制的感知行动认知模型395动映射潜在动作关系元组effect =0,表明该动作在当前状态下是不应该被选择的,针对该情况,t +1时刻不需要对已建立的有效感知行动映射动作集进行更新;2)若t 时刻模型在当前状态下探索某一动作后,t +1时刻获得正强化V s (t +1)≥0,则对应感知行动映射潜在动作关系元组effect =1,证明该动作是当前状态下的一个有效动作,t +1时刻需要对M s 进行扩展发育.以状态s i 为例,D-SSCM 在情况2)下M s 的结构扩展发育过程如图2所示.图2D-SSCM 扩展发育原理图Fig.2D-SSCM extended development diagram更具体的,假设t 时刻,状态s i 所对应有效输出动作空间集M i 中的有效动作个数为n i ,模型以1−Exp i 探索了可输出动作集M 剩余空间中某一动作,设为m j ,t +1时刻获得正强化,因此需要对M i 进行扩展发育,具体如下:步骤1.动作扩展:将动作m j 扩展为动作集M i 第n i +1个有效动作:m j →m i (n i +1)(13)步骤2.取向性更新:按照发育算法DL 1对扩展后的动作集M i 取向性集O i 进行更新,其中DL 1算法学习过程具体如下:步骤2.1.首先针对新增加动作m i (n i +1),定义其在状态s i 下的取向性:o i (n i +1)(t +1)=1n i +1(14)步骤2.2.M i 中原有动作取向性o ik (k =1,···,n i )更新如下:o ik (t +1)=n in i +1o ik (t )(15)步骤3.好奇心激活:伴随着状态s i 下新动作m i (n i +1)的增加,除取向性按式(14)和式(15)进行更新外,状态s i 对m i (n i +1)的好奇心也随之被激活,用于计算动作好奇度的感知行动映射学习次数n i (n i +1)=1,并在以后的学习中不断更新.可以看出,任何新发育的动作,其所对应的好奇心值均较大,结合对新增动作定义的初始取向性值,能够保证模型对该有效动作的充分学习.步骤4.结构发育:n i ←n i +1(16)DL 1算法分析:D-SSCM 在结构不需要发育时,其取向性学习算法如L s 所示,算法有效性在文献[18]中给出了相关证明,在此不再赘述.t +1时刻,若模型结构需要发育,则发育后模型中动作的取向性应满足L s 的学习条件,即:1)0≤o ik (t +1)≤1(k =1,2,···,(n i +1)),2) n i +1k =1o ik (t +1)=1.针对条件1):t +1时刻,对于新扩展的动作m i (n i +1)的取向性有:0≤o i (n i +1)(t +1)=1n i +1≤1(17)满足条件,对于M i 中原有动作的取向性有:o ik (t +1)=n in i +1o ik (t ),k =1,···,n i(18)在0≤o ik (t )≤1的情况下,因为0≤n in i +1≤1,可知0≤o ik (t +1)≤1成立,因此DL 1发育算法满足条件1).针对条件2),t +1时刻:n i +1 k =1o ik (t +1)=n ik =1o ik (t +1)+o i (n i +1)(t +1)=n i k =1n i n i +1o ik (t )+1n i +1=n i n i +1nik =1o ik (t )+1n i +1=1(19)可见DL 1发育算法满足条件2).从以上扩展发育算法DL 1可以看出,在潜在动作关系元组引入的条件下,相比较于文献[18]认知模型,D-SSCM 对各动作的初步探索可一次完成,通过计算effect 的值仅对各状态下的有效动作进行发育用于后期的学习,大大降低了对感知行动映射的学习成本以及取向性更新时的计算成本,同时模型对整个可输出动作集的探索依概率进行,从另一方面缩减了计算成本.2.2.2缩减发育算法DL 2D-SSCM 认知模型在状态s i 下对其有效感知行动映射动作集M i 进行学习,遵循内发动机下的主动学习机制.M i 中,对所有的动作都有潜在动作396自动化学报47卷关系元组:(1,(s i ,m ik ))(20)成立,但在操作条件反射机制下,模型总是趋向于选择获得更大正强化值的动作,随着学习的进行,某些有效动作的取向性会随着学习的进行不断降低,当其取向值下降到一定程度以下时,D-SSCM 在好奇心作用下,依据内发动机机制继续对其进行学习会同时造成学习和计算的浪费,此时需要对模型结构进行缩减发育.D-SSCM 在对其有效输出动作空间集M s 的学习过程中,如果t 时刻,当前状态s i 下某动作m ik 所对应的取向性o ik (t )满足:o ik (t )≤110×n i(21)则认为动作m ik 不属于当前状态下的可选潜在最优动作,需要将其从M i 中剪除.不同于结构扩展发育时直接将有效动作m j 作为M i 第n i +1个有效动作,D-SSCM 的结构缩减发育经历一个比较复杂的过程,具体如图3所示.图3D-SSCM 缩减发育原理图Fig.3D-SSCM reduced development diagram以t 时刻,状态s i 下的有效输出动作集M i 中第j (j ∈1,···,n i )个动作m ij 需要被剪除为例,D-SSCM 的缩减发育原理具体如下:步骤1.动作剪除:首先将m ij 从M i 中剪除.步骤2.取向性更新:M i 中动作m ij 被剪除后,对其剩余动作取向性按发育算法DL 2进行更新,具体为:o ik (t +1)=o ik (t )1−o ij (t )(22)步骤3.结构发育:对剪除动作m ij 后的M i 结构进行更新.步骤3.1.对于k <j 的动作各自排序不变,对于k >j 的动作,依次向前移动:m ik →m i (k −1)(23)直至m in i →m i (n i −1)(24)步骤3.2.将M i 空间由n i 维降低为n i −1维:n i ←n i −1(25)结构发育过程中,各动作相关性质如取向性、好奇心等随动作更新.DL 2算法分析:与DL 1算法相同,DL 2算法同样需要保证L s 的学习条件:1)0≤o ik (t +1)≤1(k =1,2,···,(n i −1)),2) n i −1k =1o ik (t +1)=1成立.在结构缩减发育下,可简单描述为:t +1时刻上述步骤2中1)0≤o ik (t +1)≤1,(k =1,···,n i ),且k =j ,2) j −1k =1o ik (t +1)+ n ik =j +1o ik (t +1)=1.针对条件1),由于对任意动作m ik ,其取向性满足o ik (t )≤1−o ij (t ),因此有:0≤o ik (t +1)=o ik (t )1−o ij (t )≤1(26)成立,满足条件.针对条件2),t +1时刻:j −1 k =1o ik (t +1)+n ik =j +1o ik (t +1)=j −1 k =1o ik (t )1−o ij (t )+n i k =j +1o ik (t )1−o ij (t )=j −1 k =1o ik (t )+n i k =j +1o ik (t )1−o ij (t )=1−o ij (t )1−o ij (t )=1(27)条件2)成立.学习中的某一时刻,若有效感知行动映射取向性集O i 中同时存在多个需要被剪除的动作,则按顺序依次重复上述过程.2.3学习过程具有发育机制的感知行动认知模型D-SSCM 学习步骤可总结如下:步骤1.初始化.学习初始时刻t =0时,对D-SSCM 中各元素进行初始化,具体包括:定义模型内部可感知离散状态集S 及可输出动作集M ,定义模型状态评价函数V ,设置学习相关参数,设置学习终止条件.不同于文献[18]认知模型,D-SSCM 中,其要学习的感知行动映射结构是可发育的,有效感知行动映射相关元素是随着学习不断变化的,无需提前2期张晓平等:一种具有发育机制的感知行动认知模型397定义,以节省计算空间,具体包括有效感知行动映射取向性集O s、有效感知行动映射学习次数集N s、有效感知行动映射好奇心集C s、有效操作函数集P s.步骤2.状态感知.观察学习t时刻D-SSCM 模型状态s i(t),并计算当前状态取向值V(t).步骤3.计算当前状态下的探索率Exp i.依概率1−Exp i对M剩余动作空间进行探索,依概率Exp i对M i有效动作空间进行学习.初始时刻, D-SSCM没有任何先验知识,M i为∅,模型以概率1探索M,即模型需要从M中获取知识,同时,在此规定,在学习任意时刻,若M i为∅,则模型以概率1探索M剩余动作空间.所谓状态s i下M的剩余动作空间,即状态s i在可输出动作集M中所有潜在动作关系元组(effect,(s i,m j))中effect值为∅的动作,effect 值为∅表示感知行动映射(s i,m j)没有被探索.t时刻,若D-SSCM依概率1−Exp i对剩余动作空间进行了探索,则执行步骤4.1.1∼步骤4.1.5:步骤4.1.1.选择动作并输出.D-SSCM在当前状态的M剩余动作空间中随机选择某个动作并输出;步骤4.1.2.状态发生转移.t时刻,模型在当前状态s i(t)下从M剩余动作空间中随机选择了某个动作,假设为m j作用于客体环境,状态发生转移,观测t+1时刻模型的新状态,并计算其状态值V(t+1);步骤4.1.3.计算取向函数值V s(t+1).根据t 时刻及t+1时刻观测到的状态值计算模型的取向函数值V s(t+1),此处用于计算模型潜在动作关系effect值;步骤4.1.4.更新模型潜在动作关系集.根据计算获得的取向函数V s(t+1)值更新模型M空间潜在动作关系元组(effect,(s i,m j)),若V s(t+1)≥0,则effect=1,若V s(t+1)<0,则effect=0;步骤4.1.5.判断是否扩展发育.根据新生成的潜在动作关系元组的effect值判断是否需要对状态s i下的有效动作空间M i进行扩展发育,若effect=0,表明所探索的动作在当前状态下是无效的,t+1时刻无需对M i进行扩展发育,D-SSCM 有效感知行动映射结构不变;若effect=1,则表明t时刻探索到当前状态下一个有效动作,t+1时刻需要将探索到的动作扩展到M i中,具体按第2.2.1节中扩展发育算法对模型结构及相关属性进行更新.t时刻,若D-SSCM依概率Exp i对当前状态s i下有效动作空间M i进行学习,则执行步骤4.2.1∼步骤4.2.7,D-SSCM对M i中各动作的学习依内发动机机制进行[18],具体为:步骤4.2.1.计算当前状态下的好奇心集C i(t).在感知状态s i(t)下,D-SSCM有效输出动作空间M i中某一动作,设为m ik(k∈1,2,···,n i)随机引起了模型对其进行学习的好奇心,其好奇度被激发,计算该好奇心值c ik(t),对于没有引起模型好奇心的其余动作,c ik (t)=0;步骤4.2.2.计算操作函数集P i(t).结合模型当前状态下的有效感知行动映射取向性集O i(t)及好奇心集C i(t),计算当前状态下的有效操作函数集P i(t);步骤4.2.3.选择动作并输出.依据内发动机机制,选择M i中操作函数值最大的动作,设为m ib(b∈1,2,···,n i)作用于环境中;步骤4.2.4.状态发生转移.感知模型t+1时刻新状态,计算其状态值V(t+1);步骤4.2.5.计算取向函数值V s(t+1).计算t+1时刻模型取向函数值V s(t+1),此处用于决定模型已有结构下取向性学习方向;步骤4.2.6.更新有效感知行动取向性映射集.根据式(7)对有效感知行动取向性映射集O i进行更新;步骤4.2.7.判断是否缩减发育.根据更新后的取向性映射集O i判断是否需要对M i进行缩减发育,当O i中存在需要被剪除的动作时,依据第2.2.2节缩减发育算法对模型结构及相关属性进行更新.步骤5.判断学习结束条件.根据设定的学习终止条件判断学习是否结束,若满足条件,则结束,否则返回步骤2.D-SSCM的学习过程可用流程图4更清楚直观地描述.3两轮机器人自平衡实验3.1D-SSCM模型设置针对两轮机器人自平衡任务,首先需要对D-SSCM模型进行设置.1)定义模型可感知离散状态.本文中,机器人的自平衡主要指其在俯仰方向上的平衡.通过倾角传感器和陀螺仪,机器人可获知自身的倾角角度(用ϕ表示)以及倾角角速度(用˙ϕ表示).以平衡位置(竖直向上)为中心,采用对称法,可在俯仰方向上将机器人身姿角度ϕ和身姿角速度˙ϕ各划分为12个离散状态,如表1所示,因此D-SSCM共有n s=12×12=144个可感知状态.2)两轮机器人通过控制轮子的运动实现平衡,因此模型可输出动作设定为轮子的转矩,可输出动作集设计为M={−10,−5,−2,−1,−0.1,0 0.1,1,2,5,10}(N·m),机器人共有n m=11个可输出动作;。
(DL)电力标准目录
10 DL/T 1072-2007 11 DL/T 1073-2007 12 DL/T 1074-2007 13 DL/T 1075-2007 14 DL/T 1076-2007 15 DL/T 1077-2007 16 DL/T 1078-2007 17 DL/T 1079-2007 18 DL/Z 1080.2-2007 19 DL/T 5056-2007 20 DL/T 5079-2007 21 DL/T 5395-2007
2 DL/T 491-2008 3 DL/T 578-2008 4 DL/T 586-2008 5 DL/T 664-2008
220kV~750kV电网继电保护装置运行整定规程 3kV~110kV电网继电保护装置运行整定规程 微机继电保护装置运行管理规程 多功能电能表 多功能电能表通信协议 能量管理系统应用程序接口(EMS-API)第1部分:导则和一般要求 能量管理系统应用程序接口(EMS-API)第501部分:公共信息模型的资源描述框 架(CIM RDF)模式 核电厂水泵定期试验规范 电厂厂用电源快速切换装置通用技术条件 电力用直流和交流一体化不间断电源设备 数字式保护测控装置通用技术条件 火力发电厂化学调试导则 苯乙烯系离子交换树脂有机溶出物测定方法(动态法) 表面式凝汽器运行性能试验规程 输电线路张力架线用防扭钢丝绳 电力企业应用集成 配电管理的系统接口 第2部分:术语 变电站总布置设计技术规程 水电站引水渠道及前池设计规范 碾压式土石坝设计规范
书名
六氟化硫电气设备中绝缘气体湿度测量方法
电力行业
废止标准 DL/T 404-1997 DL/T 506-1992 DL/T 559-1994 DL/T 584-1995 DL/T 587-1996 DL/T 614-1997 DL/T 645-1997
LTE R12 UE category和category DL

LTE R12 UE category和category DL/UL区别规范1、ue-CategoryThe field ue-Category defines a combined uplink and downlink capability. The parameters set by the UE Category are defined in subclause 4.2. Tables 4.1-1 and 4.1-2 define the downlink and, respectively, uplink physical layer parameter values for each UE Category. A UE indicating category 6 or 7 shall also indicate category 4. A UE indicating category 8 shall also indicate category 5. A UE indicating category 9 shall also indicate category 6 and 4. A UE indicating category 10 shall also indicate category 7 and 4. A UE indicating category 11 shall also indicate category 9, 6 and 4. A UE indicating category 12 shall also indicate category 10, 7 and 4. Table 4.1-4 defines the minimum capability for the maximum number of bits of a MCH transport block received within a TTI for an MBMS capable UE.Table 4.1-1: Downlink physical layer parameter values set by the field ue-CategoryTable 4.1-2: Uplink physical layer parameter values set by the field ue-CategoryTable 4.1-3: Total layer 2 buffer sizes set by the field ue-CategoryTable 4.1-4: Maximum number of bits of a MCH transport block received within a TTI set by the field ue-Category for an MBMS capable UETable 4.1-5: Half-duplex FDD operation type set by the field ue-Category for ahalf-duplex FDD capable UE2 ue-CategoryDL and ue-CategoryULThe fields ue-CategoryDL and ue-CategoryUL define downlink/uplink capability respectively. The parameters set by the UE DL/UL Categories are defined in subclause 4.2. Tables 4.1A-1 and 4.1A-2 define the downlink and, respectively, uplink physical layer parameter values for each UE DL/UL Category Table 4.1A-4 defines the minimum capability for the maximum number of bits of a MCH transport block received within a TTI for an MBMS capable UE. Table 4.1A-6 defines the only combinations for UE UL and DL Categories that are allowed to be signalled with ue-CategoryDL and ue-CategoryUL. Table 4.1A-6 also defines which UE Categories a UE shall indicate in addition to the combinations for UE UL and DL Categories.Table 4.1A-1: Downlink physical layer parameter values set by the field ue-CategoryDLTable 4.1A-2: Uplink physical layer parameter values set by the field ue-CategoryULTable 4.1A-3: Total layer 2 buffer sizes set by the fields ue-CategoryDL and ue-CategoryULTable 4.1A-4: Maximum number of bits of a MCH transport block received within a TTI set by the field ue-CategoryDL for an MBMS capable UETable 4.1A-5: Half-duplex FDD operation type set by the field ue-CategoryDL for ahalf-duplex FDD capable UETable 4.1A-6: supported DL/UL Categories combinations set by the fields ue-CategoryDL and ue-CategoryUL and UE categories to be indicated。
设备控制器_某设备控制设计图

- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N(s) = 2s − 12s + 16 = 2(s − 2)(s − 4) H(s)的零点为1 = 2,z2 = 4 z
2
3 2
3 3 3 3 D(s) = s + 4s + 6s + 3 = (s + 1)(s + + j )(s + − j ) 2 2 2 2
H(s)的极点为 p1 = −1 3 3 p2,3 = − ± j 2 2
当s = p1 Lpn时H(s) = ∞,称 1 ⋅ ⋅ ⋅ pn为极点 p
s = σ + jω
极点用“ 零点用“ 表示。 极点用“×”表示 ,零点用“。”表示。 × 零、极点分布图
jω ω
。
σ
例 解
2s2 − 12s + 16 绘出其极零点图 H(s) = 3 2 s + 4s + 6s + 3
例
1 , s = jω 设H0 = RC
_
uS
C
uc
_
H0 H( jω) = = H( jω) ∠θ( jω) jω+ 1/ RC
H0 H0 H( jω) = = jω + 1/ RC jω − p1
M2 M1
jω2 ω jω1 ω
jω
H0 H( jω) = Me jθ jω − p1 用线段 1表示 用线段M
j =1 m
H( jω) = H0
∏ ( jω− z )
i =1 n i j =1 j
幅频特性 相频特性
∏ ( jω− p )
m n i =1 j =1
φ = arg[H( jω)] = ∑arg( jω− zi ) −∑arg( jω− pj )
定性分析RC串联电路以电压 定性分析 串联电路以电压uC为输出时电路的 串联电路以电压 频率响应。 频率响应。 1 1 UC (s) 解 H(s) = = sC = RC 1 1 US (s) s+ R+ RC sC R −1 一个极点 s = RC + +
令网络函数H(s)中复频率 ω,分析 ω)随ω变化的 中复频率s=jω 分析H(jω 随 令网络函数 中复频率 特性,根据网络函数零、 特性,根据网络函数零、极点的分布可以确定正弦输入时 的频率响应。 的频率响应。 对于某一固定的角频率ω 对于某一固定的角频率ω m ∏( jω− zi ) = H( jω) = H0 in 1 = H( jω) e jφ ∏( jω− pj )
2 8 −3t −2t S1(t ) = + 2e − e 3 3
S2 (t ) = 4e−2t − 4e−3t
② 由网函数确定正弦稳态响应
I(s)
4/s
I1(s)
2
+ -
+ -
& I
1 U (s) 2s U2(s) 1
+ + & 2jω & 1 U1 2jω U2 4/jω 相量模型
& I1
2
运算模型
jω ω × × -1 ×
。。
2 4
σ
14.3.极点、 14.3.极点、零点与冲激响应 极点
R(s) = H(s)E(s)
e(t)
激励 零 状 态
−1
r(t)
响应
E 当e(t ) = δ(t )时, (s) = 1, R(s) = H(s), r(t ) = h(t )
h(t ) =
δ(t)
[H(s)],(t)称为冲激响应 h
h(t)=r(t) 零 状态 R(s)
1
网络函数和冲激响应构成 一对拉氏变换对
例
已知网络函数有两个极点分别在s=0和 - 处 已知网络函数有两个极点分别在 和s=-1处,一 个单零点在s=1 s=1处 个单零点在s=1处,且有 limh(t) = 10 ,求H(s)和h(t)。 和 )。 t →∞
14.2网络函数的极点和零点 14.2网络函数的极点和零点
1.复平面( 1.复平面(或s平面) 复平面 平面)
N(s) H0 (s − z1 )(s − z2 ) ⋅ ⋅ ⋅ (s − zm ) H(s) = = D(s) (s − p1 )(s − p2 ) ⋅ ⋅ ⋅ (s − pn )
z 当s = z1 Lzm时H(s) = 0,称 1 ⋅ ⋅ ⋅ zm为零点
H(S) =
def
[零状态响应] =
[激励函数 ]
[r ( t )] = R( S ) [e( t) E ( S ) ]
例
电路激励i(t)=δ(t),求冲击响应 δ ,求冲击响应h(t),即电容电压 C(t)。 电路激励 ,即电容电压u 。
iS
R C
+ _
uc
Is(s)
R
1/sC
+ _ UC(s)
若网络函数为真分式且分母具有单根, 若网络函数为真分式且分母具有单根,则网络的冲击响应为
h(t ) =
−1
[H(s)] =
n ki pt −1 [∑ ] = ∑Kie i =1 s − p i =1 i n
i
显然极点位置不同,响应性质不同, 显然极点位置不同,响应性质不同,极点反 映网络响应的动态过程中自由分量的变化规律。 映网络响应的动态过程中自由分量的变化规律。
1 1 & & U(s) →U I(s) → I 令: sL → jωL → sC jωC & & & & 得: U1 = H1( jω)I U2 = H2 ( jω)I
H(s)中令 = jω得正弦稳态下的网络函 s 数
& R( jω) R H( jω) = = & E( jω) E
响应相量 激励相量
第14章 14章
重点
网络函数
1. 网络函数的概念 2. 网络函数的极点和零点 3. 网络函数的极点和零点分布与时 域响应和频域响应的联系
14.1
网络函数的定义
1. 网络函数 (s)的定义 网络函数H( )
在线性网络中,当无初始能量, 在线性网络中,当无初始能量,且只有一个独立激励 源作用时, 源作用时,网络中某一处响应的象函数与网络输入的象函 数之比,叫做该响应的网络函数。 数之比,叫做该响应的网络函数。
|H(jω)| 1 低通特性
-1/RC |θ(jω)| θ
×
θ1
σ
ω
-π/2 π 相频特性
ω
幅频特性
若以电压u 若以电压 R为输出时电路的频率响应为
U2 (s) R s H(s) = = = 1 1 US (s) R + s+
sC
+ C _
+
RC
Ne H( jω) = Me jθ
jω M1 N1 1 0.707
UC (s) UC (s) 1 1 1 H(s) = = = = ⋅ 1 C 1 IS (s) 1 sC + s+ R RC
h(t ) = uC (t ) =
注意
−1
[H(s)] =
t 1 1 − RC 1 −1 C ⋅ s + 1 RC = C e ε(t )
H(s)仅取决于网络的参数与结构,与输入E(s)无关, 仅取决于网络的参数与结构,与输入 无关, 仅取决于网络的参数与结构 无关 因此网络函数反映了网络中响应的基本特性。 因此网络函数反映了网络中响应的基本特性。
Hi (S) =
(S + a)2 + ω2
ω
jω
Hi (S) =
(S − a)2 + ω2
ω
×
×
×
1 Hi (S) = S
×
×
×
1 Hi (S) = S +a
1 σ Hi (S) = S −a
×
×
ω Hi (S) = 2 2× S +ω
返 回 上 页 下 页
极点、 14.4 极点、零点与频率响应
由已知的零、极点可知: 解 由已知的零、极点可知: k(s − 1) H(s) = s(s + 1)
h(t ) =
→∞
−1
[H(s)] =
−1
k(s − 1) = −k + 2ke−t s(s + 1)
limh(t) = 10 t →∞
k=-10 -
− 10(s − 1) ∴ H(s) = s(s + 1)
jψ
uS
R
u2
_
|H(jω)|
×
θ1
。
Ψ1
σ
1/RC意义 网络函数 的物理意义
① 驱动点函数 激励是电流源, 激励是电流源,响应是电压
H(S) =
E(s)
I(s)
E(S) I(S)
驱动点阻抗
激励是电压源,响应是电流 激励是电压源,
I(S) H(S) = 驱动点导纳 E(S)
转移函数(传递函数 传递函数) ② 转移函数 传递函数 I1(s) U1(s) I2(s) U2(s)
例
R(s) = H(s)E(s)
图示电路, 图示电路,is (t ) = ε(t ),响应为u1、u2, 求阶跃响应S1(t )、S2 (t )
2Ω Ω
i(t)
+
1Ω u Ω 1 1/4F 2H
+
u2
I(s)
4/s
I1(s)
2
+ -
+ -
1 U (s) 2s U2(s) 1
-
-
U1(s) 解 H1(s) = IS (s) = 1 s 1 +1+ 4 2 + 2s 4s + 4 = 2 s + 5s + 6