伺服电机控制速度运行规划图
伺服控制器原理图

9HL7 9SB5
9-5
溜槽下限位
9K
溜槽伺服复位 炉顶现场接近开关
9SD
9-7
溜槽手动
9HL10 9LK3
溜槽上限位
9SA1
3 4 9-7 1 2 9-9
9SA2
溜槽手动开
9KJ
9WJ3
9-37
操作箱
ቤተ መጻሕፍቲ ባይዱ9GJ
3 4 9-15
1 2
9-13
溜槽手动关 9SA1闭合表
9SA2闭合表 手动-料流阀-自动 溜槽自动 LW6-1/B048 1 1-2 45° 0° 45°
9-1 9-2
XT1
9-7
三位自保持转换开关 三位自复位转换开关
溜槽手动
公共端+
9W02 16*1.5
至伺服控 制柜
SA1
3 4 9-9 9-7 1 2
SA2
溜槽手动开
手动
开阀
自动
1 2 9-15 9-13 3 4
关阀
溜槽手动关
运行
手动 溜槽自动
自动
关
开
故障
9-13
公共端-
HL1
9-21
溜槽运行
急停
用户名称 项目名称 标 图 号 题
北京金自天正智能控制有限公司 高炉自动化控制系统 溜槽伺服电机控制原理图 HSD10J2JT3
sofTech
北京金自天正智能控制有限公司 高炉自动化控制布料系统
0
1
2
序号 高层代号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 HSD08J2G22-1 = JT HSD08J2JT2-3 = G2 HSD08J2G21-24 = M0 HSD08J2M01 图纸目录
第6讲伺服电动机

实验说明
❖ 信号符号连接器针编号码说明 ❖ P-OT CN1-42 信号线为L(0 V) 时伺服电机可以
正转。 ❖ N-OT CN1-43 信号线为L(0 V) 时伺服电机可以
反转。 ❖ /S-ON CN1-40 信号线为L(0 V) 时伺服ON。此时,
请再调整为伺服OFF 的状态。 ❖ +24VIN CN1-47 顺序信号用的控制电源供给端
小的普通直流电动机。 有他励式和永磁式两种,其结构与普通
直流电动机的结构基本相同。
16
基本结构
杯形电枢直流伺服电动机的转子由非磁性 材料制成空心杯形圆筒,转子较轻而使转动 惯量小,响应快速。转子在由软磁材料制成 的内、外定子之间旋转,气隙较大。
17
无刷直流伺服电动机用电子换向装置 代替了传统的电刷和换向器,使之工作更 可靠。它的定子铁心结构与普通直流电动 机基本相同,其上嵌有多相绕组,转子用 永磁材料制成。
24
增量式编码器
❖ 增量式编码器是直接利用光电转换原理输出 三组方波脉冲A、B和Z相;A、B两组脉冲相 位差90.每相为每转一个脉冲,用于基准点定 位。它的优点是原理构造简单,机械平均寿 命可在几万小时以上,抗干扰能力强,可靠 性高,适合于长距离传输。其缺点是无法输 出轴转动的绝对位置信息。
25
绝对式编码器
❖其它Pn600 ~ Pn601 外置式再生电阻器的容量指定以及预约常数。
❖辅助功能的执行Fn000 ~ Fn012 执行JOG 模式运行等辅助性的功 能。
❖监视模式Un000 ~ Un00D 速度和扭矩指令值的监视,可以通过监 视确
认输入/ 输出信号的ON/OFF。
36
使用/ 不使用输入信号的切换
机处于单相运行状态,若转子电阻很大,使 临界转差率sm>1,这时合成转矩的方向与电 机旋转方向相反,是一个制动转矩,这就保
伺服电机速度环、位置环、扭矩环的控制原理
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
1、电流环:电流环的输入是速度环PID调节后的那个输出,电流环的输入值和电流环的反馈值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。
2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。
速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
速度环控制包含了速度环和电流环。
3、位置环:位置环的输入就是外部的脉冲,外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,位置环输入值和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分调节)后输出和位置给定的前馈值的和构成速度环的给定。
位置环的反馈也来自于编码器。
位置控制模式下系统进行了3个环的运算,系统运算量大,动态响应速度最慢。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。
而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。
三种控制模式位置控制:通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的数量来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
伺服电机速度环、位置环、扭矩环的控制原理
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
1、电流环:电流环的输入是速度环PID调节后的那个输出,电流环的输入值和电流环的反馈值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。
2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。
速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
速度环控制包含了速度环和电流环。
3、位置环:位置环的输入就是外部的脉冲,外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,位置环输入值和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分调节)后输出和位置给定的前馈值的和构成速度环的给定。
位置环的反馈也来自于编码器。
位置控制模式下系统进行了3个环的运算,系统运算量大,动态响应速度最慢。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。
而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。
三种控制模式位置控制:通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的数量来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
伺服三环结构框图及其控制模式
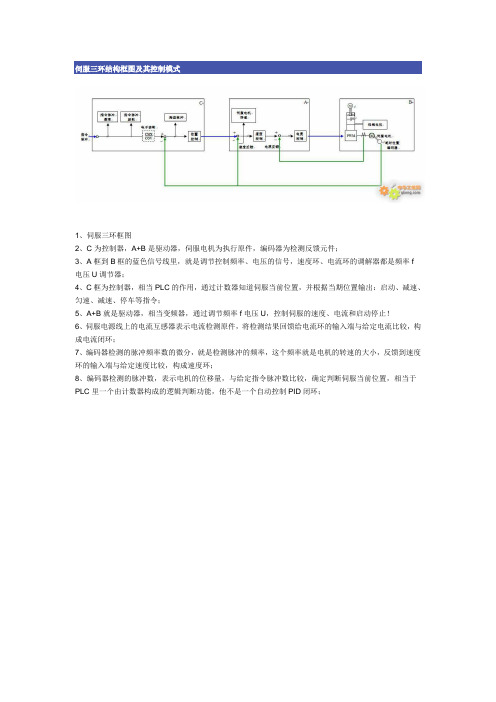
伺服三环结构框图及其控制模式1、伺服三环框图2、C为控制器,A+B是驱动器,伺服电机为执行原件,编码器为检测反馈元件;3、A框到B框的蓝色信号线里,就是调节控制频率、电压的信号,速度环、电流环的调解器都是频率f电压U调节器;4、C框为控制器,相当PLC的作用,通过计数器知道伺服当前位置,并根据当期位置输出:启动、减速、匀速、减速、停车等指令;5、A+B就是驱动器,相当变频器,通过调节频率f电压U,控制伺服的速度、电流和启动停止!6、伺服电源线上的电流互感器表示电流检测原件,将检测结果回馈给电流环的输入端与给定电流比较,构成电流闭环;7、编码器检测的脉冲频率数的微分,就是检测脉冲的频率,这个频率就是电机的转速的大小,反馈到速度环的输入端与给定速度比较,构成速度环;8、编码器检测的脉冲数,表示电机的位移量,与给定指令脉冲数比较,确定判断伺服当前位置,相当于PLC里一个由计数器构成的逻辑判断功能,他不是一个自动控制PID闭环;1、运动控制的三环;2、变频器,即驱动器,有电流环和速度环;3、控制器,即PLC,由计数器构成的位置环,该环不是PID闭环!4、所谓速度环、电流环就是伺服电机调速电路的速度环、电流环,速度环控制期间,电机为硬特性;电流环控制期间电机呈软铁性!5、所有伺服,伺服电机的控制就是一个“电机调速电路”,可以是交流电机的变频调速电路,也可以是直流电机的调速电路;6、那么电机的启动、加速、匀速、减速、停车指令,由位置环产生,或者说由PLC构成的控制器产生;1、这个图中,是说伺服指令脉冲数(位置)、指令脉冲频率(速度)给定的方式;2、举例说电子凸轮给定方式、位置给定方式等;3、所有伺服,不管他是什么型号,什么厂家、国家,伺服的速度环、电流环都在伺服电机的调速电路上!4、如果是交流电机,肯定是在变频调速电路上!如果是直流电机肯定在直流调压调速电路上!1、上边这个三环框图中,A+B就是变频调速度驱动器,有速度环、电流环构成;2、对比上边的三环图,可以看出变频器就是伺服电机的速度环、电流环,他们的结构框图实质是一样的!3、或者说A+B就是变频器的闭环框图:引用my39366 的回复内容:……根据指令位置(速度?),结合位置环增益,给出速度,再根据速度环增益,给出需要的电流,最终位置、速度都反应在电流的大小上。
安川伺服电机转矩图解

安川伺服电机转矩图解通常从用户手册上可以查得每个电机都有一张[扭矩-转速特性]图,它体现了伺服电机扭矩特性与转速特性之间的关系,以SGMAH-A5B为例:图中【A】为连续使用区域、【B】为反复使用区域在【A】区域,伺服电机可以长时间不间断运行,因此从图中可以看出,即使在最高转速电机也可以长时间运行,只是当前的扭矩会有一定损失.在【B】区域,伺服电机可以以过载的状态运行,但是由于伺服单元内置有保护功能,当伺服电机与伺服单元过载时可对其进行保护。
因此,伺服单元的容许通电时间即允许在过载状态下运行的时间因内置的过载保护功能而受到下图所示的限制.过载检测电平是在电机环境温度40?以及热启动的条件下设定的.注:上图中的A、B过载保护特性适用于与下述伺服电机配套的情况.A:容量为400W以下的SGMAH型与SGMPH型伺服电机时.B:其他的SGMAH、SGMPH型伺服电机以及SGMGH、SGMSH、SGMDH型伺服电机时.位置控制时,指令控制器发出脉冲指令后电机不转动请对一下几点进行检查(前提条件:伺服点动测试运行正常)。
1. 检查伺服LED显示是否已经S-ON(省略符号:RUN)?2. 位置控制时,检查用户参数Pn000的第1位,是否为1(显示内容:Pn000=XX1X)? 3. 根据Q2检查位置指令输入电路的接线。
4. 检查用户参数Pn200的第0位,核对伺服单元侧的脉冲指令输入形态是否与指令控制器的规格相匹配?5. 检查伺服LED显示确认指令控制器脉冲输出无误.位数据?:正在输入指令脉冲时点亮、未输入指令脉冲时熄灭.6. 通过电子齿轮和指令控制器的脉冲发生频率,计算得出电机实际的速度,检查是否转速过低.7. 以上确认无误后,电机仍然无法转动的话,请联系安川上海运动控制部. 什么是伺服ON,是指接通电源后,打开输入,输出信号/S-ON,给伺服电机通电。
电机通电后,在没有指令的状态下,电机的转轴被固定,即使施加外力也无法运转,成为伺服锁定状态。
伺服电机控制速度运行规划图

伺服电机控制速度运行规划图1、这个图是伺服电机位置控制速度运行规划图,图上每一个点的高度表示这个时刻电机的运行速度;2、这个图不是运动控制轨迹图;3、这个伺服电机位置控制速度图说明位置控制过程,伺服电机由启动、加速、匀速、减速、停车几个运行速度部分,完成一个位置控制过程。
4、伺服电机的一个位置控制过程,有上电启动到停车,是一个连续转动的过程,不是脉冲步进进式前进的,编码器的反馈脉冲只是记录了运转过程电机的速度和角位移;:5、伺服电机的启动指令、加速指令、减速指令、停车指令,是PLC计数器、比较器运算得出的;6、例如:指令脉冲数-编码器反馈脉冲数/电子齿轮比=0 ,PLC输出端输出停车指令,变频调速机构完成制动停车!7、所以大家不要认为,PLC发脉冲电机转,不发就不转,发得快就转得快,发的慢就转的慢,好像PLC发脉冲控制着电机转动;8、伺服电机的速度v单位是:指令脉冲数/秒,或者是:编码器反馈脉冲数/电子齿轮比·秒;9、速度曲线图所围的面积=指令脉冲数=编码器反馈脉冲数/电子齿轮比;10、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)×周指令脉冲数=PLC计数脉冲额定频率;11、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)=PLC计数脉冲额定频率×电子齿轮比/编码器解析度;12、伺服电机运行速度可以设定,必须小于上限速度,即电机速度(r/s)<PLC计数脉冲额定频率/周指令脉冲数;13、伺服电机速度不设定,也可以默认为电子齿轮比、编码器解析度、PLC计数脉冲额定频率确定的上限速度;14、减速曲线下方三角形的面积=减速位置;15、 t3 - t2 为减速时间;16、加、减速时间的设定和变频器一样;17、下面说说系统运行负载力矩的变化情况:1)伺服匀速运行期间,负载力矩=系统摩擦力矩;2)伺服加减速运行期间,负载力矩=系统摩擦力矩+惯量加速度力矩;3)伺服运行期间,加、减速期间负载大,匀速运行期间负载小;18、下面说说系统运行电机电流、力矩的变化情况:1)伺服匀速运行期间,电机运行力矩=负载力矩=系统摩擦力矩;2)伺服加减速运行期间,电机运行力矩=负载力矩=系统摩擦力矩+惯量加速度力矩;3)伺服运行期间:加、减速期间负载大,电机运行力矩大电流大;匀速运行期间负载小电机运行力矩小、电流小;19、下面说说伺服系统电机参数的选取方法:1)安全选取法:伺服匀速运行时的电流小于额定电流,力矩小于额定力矩;伺服加减速运行时的电流等于额定电流,力矩等于额定力矩;2)允许过载选取法:伺服匀速运行时的电流等于额定电流,力矩等于额定力矩;伺服加减速运行时的电流大于额定电流,力矩大于额定力矩;3)不安全严禁选取法:伺服匀速运行时的电流大于额定电流过载,力矩大于额定力矩过载;伺服加减速运行时的电流严重大于额定电流,力矩严重大于额定力矩,电机堵转过热烧毁;20、电机加减速期间系统加速度:1)电机加减速期间系统加速度=加减速曲线的斜率tgθ;2)电机加减速期间系统加速度=惯量加速力矩/惯量,与惯量加速力矩成正比,与系统惯量成反比;3)如图,蓝色曲线表示加速力矩小或者惯量大,加速度小的速度曲线;4)如图,蓝色曲线表示加速力矩过小或者惯量过大,加速度过小的速度曲线,但是最大速度还可以达到设定速度;5)如图,蓝色曲线表示加速力矩大或者惯量小,加速度大的速度曲线;21、说说伺服运动减速位置提前量的问题:1)运行速度Vt大,伺服运动减速位置提前量大,如图,Vt2大于Vt1,减速位置提前量三角形面积大小不一样;2)惯量大或者力矩小,加速度小,减速位置提前量三角形面积大,惯量小或者力矩大,加速度大,减速位置提前量三角形面积小;3)上边94楼95楼,说明伺服运动减速位置提前量与下列因数有关:①运行速度②系统惯量③加速转矩4)所以伺服运动减速位置提前量大小,不是一个确定的数,因伺服因运行参数不同而不同;5)结论和我前面辩论的结论一致!计算公式一致!21、下面说说一个配置高解析度编码器的伺服系统,电子齿轮比设置高、中、低时的速度曲线图对应的三年中运行模式:1)配置高解析度编码器的伺服系统,电子齿轮比等于1,或者小于1,电机运行速度上限低,电机只能低速运行,否则编码器反馈脉冲变形计数错误,伺服位置控制失败,如图蓝色曲线;2)配置高解析度编码器的伺服系统,爲了满足加工速度的需要,将电子齿轮比设置大一些,远大于1,电机运行速度上限大大提高,但是编码器分辨率下降不能得到充分利用,是一种浪费,如图黑色曲线;3)配置高解析度编码器的伺服系统,爲了满足加工高速度的需要,将电子齿轮比设置很大,电机运行速度上限很高,这时编码器分辨率下降为低解析度、低分辨率,浪费巨大,如图红色曲线;4)电子齿轮比小,电机低速运行,电机加减速加速度小,电机加减速电流小转矩小,如图蓝色曲线;5)电子齿轮比中,电机中速运行,电机加减速加速度中,电机加减速电流中转矩中,如图黑色曲线;6)电子齿轮比大,电机高速运行,电机加减速加速度大,电机加减速电流大转矩大,如图红色曲线;7)同一个系统,惯量不变,由于运行电子齿轮比设置高低不同,系统运行速度不同;加减速加速度不同,电机工作电流不同,运行功率不同;8)同一个系统,惯量不变,由于运行电子齿轮比设置高,系统运行速度高;加减速加速度高,电机工作电流高,运行功率大,此时并非惯量过载,如红色曲线;力辉电机22、下面说说所谓“惯量过载”的问题:1)同一个系统,由于负载惯量增大,导致加减速加速度下降很多,运行加减速时间拖得长,几乎加速完成后没有匀速运动就开始减速运动,运行全过程时间拖的很长,如图中的蓝色曲线,可以简单说成惯量过载;2)同样的曲线,也可能是因电机额定转矩小额定功率小选型小,导致如图中的蓝色曲线的情况发生,那就叫电机选型小电机过载;3)这要看这种曲线发生的背景,才能说是惯量过载,还是电机选型小的问题!。
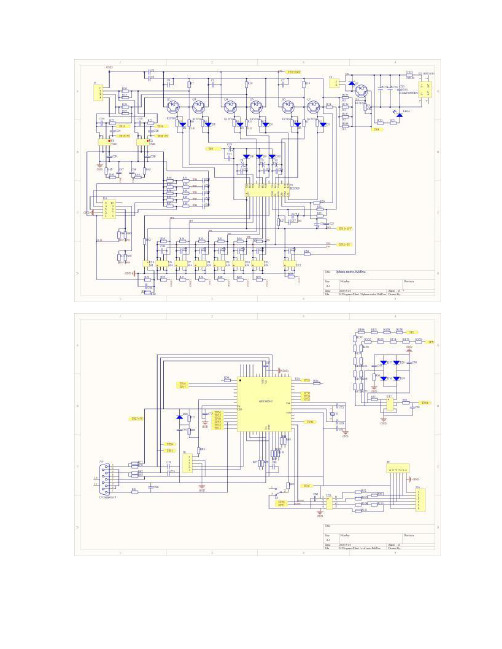
伺服电机控制板原理图(优选)word资料

伺服电机控制板原理图(优选)word资料1 2 3 4 P0R11302 P0R14502 P0D2701 1 P0R10902 P0U2102 A P0C9501 P0C9502 P0T201 P0U2101 2 1 T2 R113 R145 R87 R91 P0R13701 P0R11301 P0C9002 P0C9001 P0C9101 P0C9102 P0R14501 P0D3002 P0D2702 4P0U2104 AC 3P0U2103 V- R137P0C10202 P0C10201 P0R13702 P0R13002 3 P0D3001 P0R12001 P0C10302 P0C10301 P0R12002 P0D3202 P0C10702 P0C10701 C102 C103 u1620 C107 P0C10602P0C10601 P0R9502 P0D3201 P0T203 9 D30 R120 D32 2 P0T202 C90 220uFP0R10901 U21 GBU1010 AC V+ D27 R109 C95 P0R8701 P0R8702 C85 P0C8501P0C8502 P0R9102 A C91 P0R9101 D39 L3 P0L302 P0L301 P0D3901 P0D3902P0T209 D28 P0D2801 P0D2802 P0TP33 TP33 P0R13001 R95 D38 P0D3802 P0D3801 P0C9602 P0C9601 P0C9802 P0C9801 P0R10702 P0R9501 R130 P0R13402 4 P0T204 10 P0T2021 4 P0S203 3 P0S204 C106 C96 C98 R107 P0C8702 P0C8701 OUT 15VP0TP39 TP39 C87 P0R13401 P0TP41 TP41 5 S2 P0R10701 R134 1N4148 U32P0C10002 P0C10001 P0U3202 P0T205 P0R15102 P0TP38 TP38 1 2 P0S202 P0S201P0R13102 6 P0T206 P0R13502 P0R13101 R135 5 N0U3403 U34.3 P0R14002P0R13501 R139 P0R13901 P0R13902 P0Q1502 P0U3105 3 P0Q1503 P0R15002UC3842AD1 R140 P0C10402 P0C10401 D33 P0D3302 P0D3301 P0R14001 P0R15001 P0R13601 P0R13602 P0R14601 P0R17902 P0R17802 P0R17702 P0R17602 P0R14102 P0R14101 C104 P0R17901 P0R17801 P0R17701 P0R17601 P0R14602 R179 R178R177 R176 R175 R133 P0R13301 P0R13302 C U34 P0U3404 P0U3401 P0R17502R146 P0R17501 R141 P0R15201 R136 R150 P0R15202 GND Q15 1 P0Q1501 20N60 2 4 2 3 RT/CT P0U3102 VFB P0U3103 I SEN P0U3104 VCC P0U3107 7 C94 P0C9401 P0C9402 C108 P0C10801 P0C10802 P0R15101 R131 C99 U31 D29 P0D2902 P0D2901 3 R151 P0U3203 B P0C9901 P0C9902 OUT GND P0C10102 P0C10101 1P0U3201 IN 2 R106 P0R10602 P0R10601 C100 C101 B P0TP40 TP40 1 COMP P0U3108 8 V REFP0U3106 6 OUT P0U3101 R152 C P0U3403 P0U3402 P0Q903 Optoisolator1P0C10501P0C10502 3 C105 K Q9 VREF P0Q901 A D Title P0R14901 2 P0Q902P0R14902 1 R149 T21 of Power source.SchDoc Size A4 Date: File: 1 2 3 2021-5-24 Sheet of D:\Program Files\..\T21 of Power source.SchDoc By: Drawn 4 Number Revision DPLC触摸屏控制伺服电机程序设计伺服电机又称执行电机,它是控制电机的一种。
松下伺服驱动器速度模式和位置模式的区别
松下伺服驱动器速度模式和位置模式的区别2008-05-16 20:39:10| 分类:默认分类|字号订阅一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
一、速度控制和转矩控制都是用模拟量来控制的。
二、位置控制是通过发脉冲(数字量)来控制的。
如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
伺服电机工作原理图

伺服电机工作原理图伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。
永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。
伺服驱动器有两部分组成:驱动器硬件和控制算法。
控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。
2 交流永磁伺服系统的基本结构交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。
其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。
我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。
目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
伺服电机原理图
伺服电机原理图伺服电机是一种能够精确控制位置、速度和加速度的电动机,它在工业自动化领域具有广泛的应用。
伺服电机原理图是对伺服电机内部结构和工作原理的图示表示,通过它我们可以更直观地了解伺服电机的工作原理和内部构造。
一、伺服电机的结构。
伺服电机一般由电机本体、编码器、控制器和驱动器等部分组成。
电机本体是伺服电机的核心部件,它通过转子和定子之间的磁场相互作用来产生转矩。
编码器用于反馈电机的转速和位置信息,控制器则根据编码器的反馈信号来调节电机的输出。
驱动器则负责将控制器输出的信号转化为电机的动力。
二、伺服电机的工作原理。
伺服电机的工作原理主要是通过控制器对电机的电流进行调节,从而控制电机的转速和位置。
当控制器接收到外部指令后,会根据编码器的反馈信号来调节电机的转速和位置,使其达到预定的目标。
控制器会不断地对电机的输出进行调整,直到达到预期的运动状态。
三、伺服电机原理图的作用。
伺服电机原理图可以帮助工程师和技术人员更直观地了解伺服电机的内部结构和工作原理,有助于他们在实际应用中更好地进行调试和维护。
通过原理图,我们可以清晰地看到伺服电机各部件之间的连接方式和信号传递路径,有利于我们更深入地理解伺服电机的工作原理。
四、伺服电机原理图的绘制方法。
绘制伺服电机原理图时,需要根据伺服电机的实际结构和工作原理进行合理的布局和标注。
一般来说,可以从电机本体、编码器、控制器和驱动器等部分入手,按照信号的传递路径和连接方式进行逐步绘制。
在绘制过程中,需要注意标注清晰、线条规范,以便于他人阅读和理解。
五、总结。
伺服电机原理图是对伺服电机内部结构和工作原理的图示表示,它能够帮助我们更直观地了解伺服电机的工作原理和内部构造。
通过对伺服电机原理图的绘制和分析,我们可以更好地掌握伺服电机的工作原理,为实际应用提供更好的支持。
以上就是关于伺服电机原理图的相关内容,希望对大家有所帮助。
伺服电机工作原理图 动画讲解

伺服电机工作原理图动画讲解伺服电机是一种能够根据反馈信号自动调整输出的电动机,它在自动化控制系统中扮演着重要的角色。
了解伺服电机工作原理对于理解其运行机制和应用至关重要。
下面通过动画方式讲解伺服电机的工作原理图,帮助读者更好地理解其运行过程。
1. 伺服电机结构伺服电机由电机本体、编码器、控制器和驱动器等组成。
其中电机本体负责转动输出,编码器负责反馈位置信息,控制器根据反馈信号实时调整输出,驱动器负责提供电力驱动电机运转。
2. 工作原理图解•步骤1:控制器接收用户输入指令,计算出需要转动的角度或位置。
•步骤2:控制器将计算结果发送到驱动器。
•步骤3:驱动器接收到控制信号后,通过电力驱动电机转动。
•步骤4:编码器实时监测电机转动位置,并将反馈信号发送给控制器。
•步骤5:控制器根据编码器反馈信号调整输出,使电机按指令转动到正确位置。
•步骤6:电机到达目标位置后,停止转动并保持稳定位置。
3. 动画演示下面通过动画演示伺服电机的工作原理图:伺服电机动画伺服电机动画从动画中可以清晰地看到控制器、驱动器、编码器和电机之间的工作关系,以及如何实现精确控制角度和位置。
这种动画讲解形式生动直观,有助于读者快速理解和掌握伺服电机的工作原理。
4. 应用领域伺服电机广泛应用于机器人、数控机床、自动化生产线等领域,能够实现精确的位置控制和运动控制。
由于其快速响应、高精度的特点,成为自动化控制系统中不可或缺的一部分。
结语通过动画形式讲解伺服电机的工作原理图,更直观地展现了其工作过程和各部件之间的协作关系。
掌握伺服电机的工作原理对于工程师和研究人员在实际应用中具有重要意义,希望本文能够帮助读者更好地理解伺服电机的工作原理。
以上就是有关伺服电机工作原理图的动画讲解,希朴希望能对你有所帮助!。
伺服电机原理图
伺服电机原理图
1. 介绍
伺服电机是一种将输入的控制信号转化为精确的运动的装置,广泛应用于工业自动化、机械制造等领域。
本文将介绍伺服电机的原理图及其工作原理。
2. 伺服电机原理图
伺服电机原理图如下:
[伺服电机原理图图片]
3. 原理分析
1.电源部分:伺服电机通过电源模块获取电能,一般采用直流电源供
电,以满足精密控制需求。
2.控制器部分:控制器是伺服电机的“大脑”,接收外部的控制信号,经
过处理后驱动电机完成相应动作。
3.编码器部分:编码器通常安装在电机轴上,用于实时反馈电机的位
置信息,确保电机能够精准地按照控制信号的要求运动。
4.驱动部分:驱动部分通常由功放模块组成,将控制器输出的信号转
化为电机可用的电压和电流,驱动电机顺利运动。
4. 工作原理
伺服电机的工作原理是通过不断地接收编码器反馈的位置信息,与控制信号进行比较,使电机能够按照预设的路径和速度进行精确的运动。
控制器不断地调整输出信号,以保持电机在理想位置上,并实现高精度的运动控制。
5. 应用领域
伺服电机广泛应用于CNC机床、工业机器人、自动化设备等领域,由于其高精度、灵活性和稳定性,成为现代工业中不可或缺的关键组件。
6. 结论
伺服电机是一种高精度、高性能的电机装置,通过优秀的控制系统和位置反馈机制,能够实现精准的运动控制,广泛应用于工业自动化领域。
掌握伺服电机的原理图和工作原理,对于深入理解其应用具有重要意义。
以上是关于伺服电机原理图的介绍,希望对您有所帮助。
伺服电机驱动器原理图
伺服电机驱动器原理图伺服电机驱动器是一种控制装置,用于控制伺服电机的运动。
它通过接收控制信号,控制电机的速度、位置和转矩,从而实现精准的运动控制。
在工业自动化、机械加工、医疗设备等领域,伺服电机驱动器被广泛应用。
伺服电机驱动器的原理图主要包括电源模块、控制模块、驱动模块和保护模块。
首先,电源模块提供电压和电流给驱动器,保证其正常工作。
控制模块接收输入信号,经过信号处理后输出给驱动模块,控制电机的运动。
驱动模块根据控制信号驱动电机转动,并通过反馈信号调整控制参数,以实现精准的位置控制。
保护模块则用于监测电流、温度等参数,一旦出现异常情况,及时停止电机工作,保护设备和人员安全。
在伺服电机驱动器的原理图中,各个模块之间通过信号线、电源线等互相连接,形成一个完整的控制系统。
控制信号经过控制模块处理后,输出给驱动模块,驱动电机运动。
同时,反馈信号也通过信号线传回控制模块,用于调整控制参数,实现闭环控制。
伺服电机驱动器的工作原理可以简单描述为,控制模块接收输入信号,经过处理后输出给驱动模块,驱动电机转动。
同时,驱动模块通过反馈信号调整控制参数,实现精准的位置控制。
在整个过程中,保护模块不断监测电流、温度等参数,一旦出现异常情况,及时停止电机工作。
伺服电机驱动器的原理图设计需要考虑到各个模块之间的连接和信号传输,保证信号的稳定和可靠。
同时,对于控制模块的信号处理和驱动模块的输出功率也需要进行精确的设计和调试,以实现对电机的精准控制。
另外,保护模块的设计也至关重要,它可以保证设备和人员的安全,避免意外事故的发生。
总的来说,伺服电机驱动器的原理图设计涉及到电气、控制、信号处理等多个领域的知识,需要工程师们综合运用这些知识,设计出高性能、稳定可靠的控制系统。
只有这样,才能满足不同领域对于精准运动控制的需求,推动工业自动化、机械加工等领域的发展。
伺服电机的PLC控制

伺服电机的PLC控制方法以我司KSDG系列伺服驱动器为例,介绍PLC控制伺服电机的方法。
伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本文简要介绍位置模式的控制方法一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。
当此端子接收信号变化时,伺服电机的运转方向改变。
实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。
7(com+)与外接24V直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接24V 直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。
其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器构成更完善的控制系统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。
3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求.3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。
伺服电机的位置控制转矩控制速度控制是什么样的一个模式

伺服电机的位置控制转矩控制速度控制是什么样的一个模式之宇文皓月创作伺服电机的位置控制,转矩控制,速度控制是什么样的一个模式,有什么分歧?例如位置控制模式,他工作的时候是不是PLC发脉冲的时候开始转动,然后plc一直发脉冲,伺服就一直走,PLC脉冲停止的时候伺服电机就停止转动?还是怎么样工作呢?1、上图就是由用户设定的指令脉冲数的图;2、用户根据工件实际需要移动的距离,和自己选定的脉冲当量,首先计算出伺服应该转动多少个指令脉冲数,就到达指定位置;3、然后用户根据“PLC发脉冲额定频率例如200KHZ”,知道指令脉冲额定频率,并根据指令脉冲数计算出指令运算时间,得到上图设定曲线;4、这个曲线在伺服还没有运行前,由用户设定的曲线;5、这条曲线设定后,伺服就知道指令脉冲额定频率,知道伺服电机的上限运行速度伺服上线运行速度=指令脉冲额定频率×伺服上限速度6、有了这条曲线,伺服就知道用户要它要转过多少个指令脉冲数,到转过这么多指令脉冲数时,伺服就指令伺服停车;7、当你设定好这个曲线后,启动伺服运转,伺服就开始启动、加速、匀速……转动起来了;8、这时候没有“PLC发脉冲”,谁也没有发脉冲,指令脉冲只是个“数”!9、那为什么大家说“PLC 发脉冲”,那是因为位置环就是PLC 的计数器,那个指令脉冲数就是给计数器设定的一个基数;10、PLC其实不发脉冲,没有实际存在的脉冲,只有一个脉冲数,当然没有指令脉冲受干扰的问题!1、这个曲线是可以用示波器观察到的曲线;2、它是伺服运转时编码器检测发出的反馈脉冲数,以及反馈脉冲数的频率曲线;3、这条曲线也可以看成伺服运转的速度曲线,因为编码器反馈脉冲的频率=编码器周反馈脉冲数×伺服电机速度(r/s)4、这条曲线,反映了伺服运转的全过程,启动→加速→匀速→减速→停车,伺服的运动是一大步完成的。
5、这条曲线与横轴时间所围成的面积就是伺服运动全过程编码器的反馈脉冲数;6、编码器的反馈脉冲数/电子齿轮比=指令脉冲数时,PLC计数器发出停车信号,驱动器停车!7、这就是伺服运动控制的核心原理!!!8、这个过程就是位置环的工作原理,或者说是PLC计数器的工作过程,指令脉冲为计数器基数,编码器反馈脉冲进入计数器计数端,当输出指令脉冲数“编码器的反馈脉冲数/电子齿轮比-指令脉冲数时=0”时,伺服停车!9、仔细观察这条曲线,编码器反馈脉冲频率的最大值,对应的就是伺服运转的最大速度;10、这个最大速度必须小于伺服电机的上限速度,也就是说这个曲线的高度要比指令脉冲曲线的高度“矮”;11、这一点很重要,如果伺服运转速度,在某一个时刻“超速”,就会出现反馈脉冲丢失或者指令脉冲增多的故障!12、仔细观察这条曲线,伺服停车前要减速,伺服停车必须在速度缓慢的情况下完成;13、这一点非常重要,如果伺服停车时,伺服速度大,那么伺服惯性大,就不克不及准停,就会向前继续惯性转一下,出现编码器反馈脉冲数大于指令脉冲数的情况;14、仔细观察这条曲线,伺服运转的最大速度是可以由用户设置的;15、用户在速度环上设定编码器反馈脉冲频率,伺服的运转速度就是设定编码器反馈脉冲频率=编码器周反馈脉冲数×伺服电机设定速度(r/s)16、因为指令脉冲频率=编码器反馈脉冲频率/电子齿轮比所以,用户也可以设定“指令脉冲频率”,来设定伺服电机速度;17、仔细观察这条曲线,伺服电机的加速、减速,就是靠驱动器变频、变压的速度环完成的,所需要的动力转矩是由电流环完成的,这就是ShowMotion 说的,“位置环可以包含速度环,也可以直接包含力矩环”!如何选择伺服电机控制方式?如何选择伺服电机控制方式?一般伺服电机都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
伺服电机控制板原理图(最全)word资料
1 2 3 4 P0R11302 P0R14502 P0D2701 1 P0R10902 P0U2102 A P0C9501 P0C9502 P0T201 P0U2101 2 1 T2 R113 R145 R87 R91 P0R13701 P0R11301 P0C9002 P0C9001 P0C9101 P0C9102 P0R14501 P0D3002 P0D2702 4P0U2104 AC 3P0U2103 V- R137P0C10202 P0C10201 P0R13702 P0R13002 3 P0D3001 P0R12001 P0C10302 P0C10301 P0R12002 P0D3202 P0C10702 P0C10701 C102 C103 u1620 C107 P0C10602P0C10601 P0R9502 P0D3201 P0T203 9 D30 R120 D32 2 P0T202 C90 220uFP0R10901 U21 GBU1010 AC V+ D27 R109 C95 P0R8701 P0R8702 C85 P0C8501P0C8502 P0R9102 A C91 P0R9101 D39 L3 P0L302 P0L301 P0D3901 P0D3902P0T209 D28 P0D2801 P0D2802 P0TP33 TP33 P0R13001 R95 D38 P0D3802 P0D3801 P0C9602 P0C9601 P0C9802 P0C9801 P0R10702 P0R9501 R130 P0R13402 4 P0T204 10 P0T2021 4 P0S203 3 P0S204 C106 C96 C98 R107 P0C8702 P0C8701 OUT 15VP0TP39 TP39 C87 P0R13401 P0TP41 TP41 5 S2 P0R10701 R134 1N4148 U32P0C10002 P0C10001 P0U3202 P0T205 P0R15102 P0TP38 TP38 1 2 P0S202 P0S201P0R13102 6 P0T206 P0R13502 P0R13101 R135 5 N0U3403 U34.3 P0R14002P0R13501 R139 P0R13901 P0R13902 P0Q1502 P0U3105 3 P0Q1503 P0R15002UC3842AD1 R140 P0C10402 P0C10401 D33 P0D3302 P0D3301 P0R14001 P0R15001 P0R13601 P0R13602 P0R14601 P0R17902 P0R17802 P0R17702 P0R17602 P0R14102 P0R14101 C104 P0R17901 P0R17801 P0R17701 P0R17601 P0R14602 R179 R178R177 R176 R175 R133 P0R13301 P0R13302 C U34 P0U3404 P0U3401 P0R17502R146 P0R17501 R141 P0R15201 R136 R150 P0R15202 GND Q15 1 P0Q1501 20N60 2 4 2 3 RT/CT P0U3102 VFB P0U3103 I SEN P0U3104 VCC P0U3107 7 C94 P0C9401 P0C9402 C108 P0C10801 P0C10802 P0R15101 R131 C99 U31 D29 P0D2902 P0D2901 3 R151 P0U3203 B P0C9901 P0C9902 OUT GND P0C10102 P0C10101 1P0U3201 IN 2 R106 P0R10602 P0R10601 C100 C101 B P0TP40 TP40 1 COMP P0U3108 8 V REFP0U3106 6 OUT P0U3101 R152 C P0U3403 P0U3402 P0Q903 Optoisolator1P0C10501P0C10502 3 C105 K Q9 VREF P0Q901 A D Title P0R14901 2 P0Q902P0R14902 1 R149 T21 of Power source.SchDoc Size A4 Date: File: 1 2 3 2021-5-24 Sheet of D:\Program Files\..\T21 of Power source.SchDoc By: Drawn 4 Number Revision D任务六伺服电机多点定位控制系统教学设计课程名称电力系统电气控制与PLC应用学习主题伺服电机多点定位控制授课专业电力系统自动化技术主讲教师赵慧娴学情分析伺服电机的多点定位控制是在单点定位的基础上增加上位机控制,上位机的可视化编程方法与触摸屏类似,所以这一任务的难度不大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机控制速度运行规划图
1、这个图是伺服电机位置控制速度运行规划图,图上每一个点的高度表示这个时刻电机的运行速度;
2、这个图不是运动控制轨迹图;
3、这个伺服电机位置控制速度图说明位置控制过程,伺服电机由启动、加速、匀速、减速、停车几个运行速度部分,完成一个位置控制过程。
4、伺服电机的一个位置控制过程,有上电启动到停车,是一个连续转动的过程,不是脉冲步进进式前进的,编码器的反馈脉冲只是记录了运转过程电机的速度和角位移;:
5、伺服电机的启动指令、加速指令、减速指令、停车指令,是PLC计数器、比较器运算得出的;
6、例如:指令脉冲数-编码器反馈脉冲数/电子齿轮比=0 ,PLC输出端输出停车指令,变频调速机构完成制动停车!
7、所以大家不要认为,PLC发脉冲电机转,不发就不转,发得快就转得快,发的慢就转的慢,好像PLC发脉冲控制着电机转动;
8、伺服电机的速度v单位是:指令脉冲数/秒,或者是:编码器反馈脉冲数/电子齿轮比·秒;
9、速度曲线图所围的面积=指令脉冲数=编码器反馈脉冲数/电子齿轮比;
10、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)×周指令脉冲数=PLC计数脉冲额定频率;
11、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)=PLC计数脉冲额定频率×电子齿轮比/编码器解析度;
12、伺服电机运行速度可以设定,必须小于上限速度,即电机速度(r/s)<PLC计数脉冲额定频率/周指令脉冲数;
13、伺服电机速度不设定,也可以默认为电子齿轮比、编码器解析度、PLC计数脉冲额定频率确定的上限速度;
14、减速曲线下方三角形的面积=减速位置;
15、 t3 - t2 为减速时间;
16、加、减速时间的设定和变频器一样;
17、下面说说系统运行负载力矩的变化情况:
1)伺服匀速运行期间,负载力矩=系统摩擦力矩;
2)伺服加减速运行期间,负载力矩=系统摩擦力矩+惯量加速度力矩;
3)伺服运行期间,加、减速期间负载大,匀速运行期间负载小;
18、下面说说系统运行电机电流、力矩的变化情况:
1)伺服匀速运行期间,电机运行力矩=负载力矩=系统摩擦力矩;
2)伺服加减速运行期间,电机运行力矩=负载力矩=系统摩擦力矩+惯量加速度力矩;
3)伺服运行期间:加、减速期间负载大,电机运行力矩大电流大;匀速运行期间负载小电
机运行力矩小、电流小;
19、下面说说伺服系统电机参数的选取方法:
1)安全选取法:
伺服匀速运行时的电流小于额定电流,力矩小于额定力矩;伺服加减速运行时的电流等于额定电流,力矩等于额定力矩;
2)允许过载选取法:
伺服匀速运行时的电流等于额定电流,力矩等于额定力矩;伺服加减速运行时的电流大于额定电流,力矩大于额定力矩;
3)不安全严禁选取法:
伺服匀速运行时的电流大于额定电流过载,力矩大于额定力矩过载;伺服加减速运行时的电流严重大于额定电流,力矩严重大于额定力矩,电机堵转过热烧毁;
20、电机加减速期间系统加速度:
1)电机加减速期间系统加速度=加减速曲线的斜率tgθ;
2)电机加减速期间系统加速度=惯量加速力矩/惯量,与惯量加速力矩成正比,与系统惯量成反比;
3)如图,蓝色曲线表示加速力矩小或者惯量大,加速度小的速度曲线;
4)如图,蓝色曲线表示加速力矩过小或者惯量过大,加速度过小的速度曲线,但是最大速度还可以达到设定速度;
5)如图,蓝色曲线表示加速力矩大或者惯量小,加速度大的速度曲线;
21、说说伺服运动减速位置提前量的问题:
1)运行速度Vt大,伺服运动减速位置提前量大,如图,Vt2大于Vt1,减速位置提前量三角形面积大小不一样;
2)惯量大或者力矩小,加速度小,减速位置提前量三角形面积大,惯量小或者力矩大,加速度大,减速位置提前量三角形面积小;
3)上边94楼95楼,说明伺服运动减速位置提前量与下列因数有关:
①运行速度
②系统惯量
③加速转矩
4)所以伺服运动减速位置提前量大小,不是一个确定的数,因伺服因运行参数不同而不同;5)结论和我前面辩论的结论一致!计算公式一致!
21、下面说说一个配置高解析度编码器的伺服系统,电子齿轮比设置高、中、低时的速度曲线图对应的三年中运行模式:
1)配置高解析度编码器的伺服系统,电子齿轮比等于1,或者小于1,电机运行速度上限低,电机只能低速运行,否则编码器反馈脉冲变形计数错误,伺服位置控制失败,如图蓝色曲线;2)配置高解析度编码器的伺服系统,爲了满足加工速度的需要,将电子齿轮比设置大一些,远大于1,电机运行速度上限大大提高,但是编码器分辨率下降不能得到充分利用,是一种浪费,如图黑色曲线;
3)配置高解析度编码器的伺服系统,爲了满足加工高速度的需要,将电子齿轮比设置很大,电机运行速度上限很高,这时编码器分辨率下降为低解析度、低分辨率,浪费巨大,如图红色曲线;
4)电子齿轮比小,电机低速运行,电机加减速加速度小,电机加减速电流小转矩小,如图蓝色曲线;
5)电子齿轮比中,电机中速运行,电机加减速加速度中,电机加减速电流中转矩中,如图黑色曲线;
6)电子齿轮比大,电机高速运行,电机加减速加速度大,电机加减速电流大转矩大,如图红色曲线;
7)同一个系统,惯量不变,由于运行电子齿轮比设置高低不同,系统运行速度不同;加减速加速度不同,电机工作电流不同,运行功率不同;
8)同一个系统,惯量不变,由于运行电子齿轮比设置高,系统运行速度高;加减速加速度高,电机工作电流高,运行功率大,此时并非惯量过载,如红色曲线;
力辉电机
22、下面说说所谓“惯量过载”的问题:
1)同一个系统,由于负载惯量增大,导致加减速加速度下降很多,运行加减速时间拖得长,几乎加速完成后没有匀速运动就开始减速运动,运行全过程时间拖的很长,如图中的蓝色曲线,可以简单说成惯量过载;
2)同样的曲线,也可能是因电机额定转矩小额定功率小选型小,导致如图中的蓝色曲线的情况发生,那就叫电机选型小电机过载;
3)这要看这种曲线发生的背景,才能说是惯量过载,还是电机选型小的问题!。