机械原理大作业2-凸轮-张文奇-1120810610
机械原理大作业2凸轮(18题)
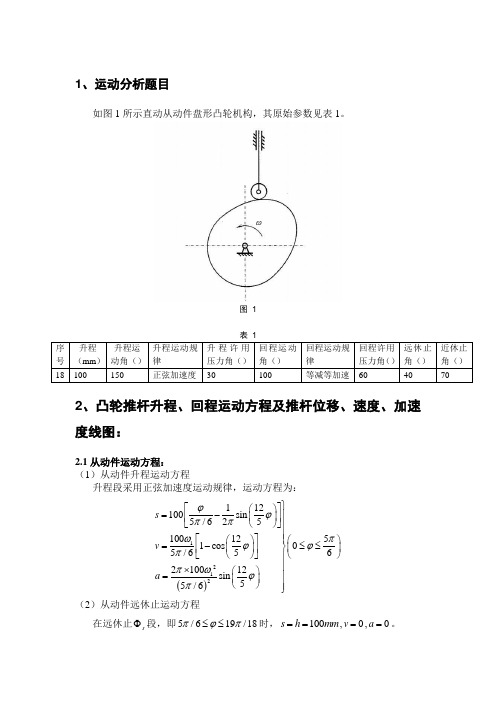
1、运动分析题目如图1所示直动从动件盘形凸轮机构,其原始参数见表1。
图 1表 1序号 升程 (mm ) 升程运动角() 升程运动规律 升程许用压力角() 回程运动角()回程运动规律 回程许用压力角() 远休止角() 近休止角()18 100150正弦加速度 30 100等减等加速 6040702、凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图:2.1从动件运动方程:(1)从动件升程运动方程升程段采用正弦加速度运动规律,运动方程为:()1212112100sin 5/6251001251cos 05/656210012sin 55/6s v a ϕϕππωπϕϕππωϕπ⎫⎡⎤⎛⎫=-⎪⎪⎢⎥⎝⎭⎣⎦⎪⎪⎡⎤⎪⎛⎫⎛⎫=-≤≤⎬ ⎪⎪⎢⎥⎝⎭⎝⎭⎣⎦⎪⎪⨯⎛⎫⎪= ⎪⎝⎭⎪⎭(2)从动件远休止运动方程在远休止s Φ段,即5/619/18πϕπ≤≤时,100s h mm ==,0v =,0a =。
(3)从动件回程运动方程升程段采用等减等加运动规律,运动方程为:()221221220019100518()94001919/184/3518()94005()9s v a πϕπωπϕπϕππωπ⎫⎪⎡⎤=--⎪⎢⎥⎣⎦⎪⎪⎪⎪⎡⎤=--≤≤⎬⎢⎥⎣⎦⎪⎪⎪⎪=-⎪⎪⎭()221221220029()518()94002()4/329/1853()94005()9s v a πϕπωπϕπϕππωπ⎫⎪=-⎪⎪⎪⎪⎪=--≤≤⎬⎪⎪⎪⎪=⎪⎪⎭(4)从动件近休止运动方程在近休止s 'Φ段,即29/182πϕπ≤≤时,0s =,0v =,0a =。
2.2推杆位移、速度、加速度线图:(1)推杆位移线图图 2 推杆位移线图(2)推杆速度线图图 3 推杆速度线图(3)推杆加速度线图图 4 推杆加速度线图3、凸轮机构的ds s d ϕ-线图,并由此确定凸轮的基圆半径和偏距:图 5 凸轮机构的dss d ϕ-线图 4滚子半径的确定及凸轮理论廓线和实际廓线的绘制 4.1凸轮的理论轮廓方程为:00()cos sin (02)()sin cos x s s e y s s e ϕϕϕπϕϕ=+-⎫≤≤⎬=++⎭式中,220031.45s r e mm =-=(1)推程凸轮轮廓方程:11231100sin cos 18sin 5/625(05/6)112(31100sin )sin 18cos 5/625x y ϕϕϕϕππϕπϕϕϕϕππ⎫⎧⎫⎡⎤⎛⎫=+--⎨⎬⎪⎪⎢⎥⎝⎭⎣⎦⎪⎩⎭≤≤⎬⎡⎤⎛⎫⎪=+-+ ⎪⎢⎥⎪⎝⎭⎣⎦⎭(2)远休止凸轮轮廓方程:131cos 18sin (5/619/18)131sin 18cos x y ϕϕπϕπϕϕ=-⎫≤≤⎬=+⎭(3)回程凸轮轮廓方程:222220019131cos 18sin 518()9(19/184/3)20019131sin 18cos 518()9x y πϕϕϕππϕππϕϕϕπ⎫⎧⎫⎪⎪⎪⎡⎤=---⎪⎨⎬⎢⎥⎣⎦⎪⎪⎪⎩⎭⎪≤≤⎬⎧⎫⎪⎪⎪⎡⎤⎪=--+⎨⎬⎢⎥⎪⎣⎦⎪⎪⎪⎩⎭⎭22222002931()cos 18sin 518()9(19/184/3)2002931()sin 18cos 518()9x y πϕϕϕππϕππϕϕϕπ⎫⎧⎫⎪⎪⎪=+--⎪⎨⎬⎪⎪⎪⎩⎭⎪≤≤⎬⎧⎫⎪⎪⎪⎪=+-+⎨⎬⎪⎪⎪⎪⎩⎭⎭(4)近休止凸轮轮廓方程:31cos 18sin (29/182)31sin 18cos x y ϕϕπϕπϕϕ=-⎫≤≤⎬=+⎭4.2凸轮理论轮廓曲线为:图 6 凸轮理论轮廓由上图可编程可求其最小曲率半径为min 10.309110mm ρ=≈,所以滚子半径min 1037r r mm ρ=-∆=-=。
机械原理大作业二凸轮(完整版) 20
Harbin Institute of Technology机械原理大作业二作业名称:凸轮机构设计设计题目: 20 院系:机电工程学院班级:设计者:学号:指导教师:**设计时间: 2014年5月哈尔滨工业大学一、设计题目如图1所示直动从动件盘形凸轮机构,其原始参数见表1。
表1 凸轮机构参数升程/h mm 升程运动角 0/ϕ 升程运动规律 升程许用压力角[]/α 回程运动角 0/ϕ'回程运动规律 回城许用压力角[]/α'远休止角/s ϕ 近休止角/s ϕ' 110 120 正弦加速度 3590 正弦加速度 65 50 100二、运动方程式及运动线图本实验假设凸轮逆时针旋转。
1.确定凸轮机构推杆升程、回程运动方程(ϕ为凸轮转角,ω为凸轮角速度)。
推程(余弦加速度)(203ϕπ≤≤): 图1远休止段:当21738πϕπ≤≤时,110s h==,0v=,0a=回程(正弦加速度)(171389πϕπ≤≤):近休止段:当1329πϕπ≤≤时,0s=,0v=,0a=2.绘制推杆位移、速度、加速度线图图2三、绘制凸轮机构的ds s d ϕ-线图,并由此确定凸轮的基圆半径和偏距图3图4如图3、图4所示,在ds d ϕ轴正侧(对应于推程),以tan(90[])α-为斜率做ds s d ϕ-曲线的切线1L ,在ds d ϕ轴负侧(对应于回程),以tan(90[])α'+为斜率做ds s d ϕ-曲线的切线2L ,再过点(0,0)O 做斜率为tan(90[])α+的直线3L ,则直线1L 、2L 、3L 与s 轴的夹角分别为[]α、[]α'、[]α。
显然,1L 、2L 、3L 三条直线下方的公共部分即为满足推程压力角不超过[]α和回程压力角不超过[]α'时,凸轮回转中心的可取区域。
记直线1L 与2L 的交点为12P ,直线1L 与3L 的交点为13P ,则最小基圆半径013r OP ==45.79mm ,对应的偏距e =26.27mm (点13P 到s 轴的距离),2200s r e =-=37.51mm 。
机械原理大作业二-凸轮机构设计..
机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:机械设计制造及其自动化班级:1208104完成者:郑鹏伟学号:**********指导教师:林琳刘福利设计时间:2014年6月4日哈尔滨工业大学一、 设计题目:凸轮的机构运动简图如下图所示:序 号 升程 (mm ) 升程运动角(°) 升程运 动规律 升程 许用压力角(°)回程运动角 (°) 回程运动规律回程许用压力角(°) 远休止角(°) 近休止角(°) 14 90120余弦 加速 度3590等减等加速657575二、 凸轮推杆升程、回程运动方程及推杆位移,速度加速度线图:(1)凸轮推杆升程运动方程: 根据题意知:00120759075s s Φ=Φ='Φ='Φ=(1)从动件升程运动方程(设为1rad sω=)122212s [1cos()]2sin()2cos()2h h h a πϕπωπυϕπωπϕ=-Φ=ΦΦ=ΦΦ(2)从动件远休止运动方程在远休止s Φ段,即213312πϕπ≤≤时,90,0,0s h mm a υ====。
(3)从动件回程运动方程升程段采用等减等加运动规律,运动方程为:①当回程0002s s ϕ'ΦΦ+Φ≤≤Φ+Φ+134()123πϕπ≤≤时: 20s 201022122[-+]4[()]4s hs h h h a ϕωυϕω=-ΦΦ'Φ=--Φ+Φ'Φ=-'Φ()②当回程0002s s ϕ'Φ'Φ+Φ+≤≤Φ+Φ+Φ419()312πϕπ≤≤时:20020100202122[)]4[)]4s s h s h h a ϕωυϕω'=Φ+Φ+Φ-'Φ'=-Φ+Φ+Φ-'Φ='Φ(((4)从动件近休止运动方程在近休止s 'Φ段,即19212πϕπ≤≤时,s 0,0,0a υ===。
机械原理大作业凸轮结构设计
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。
机械原理大作业——凸轮
大作业(二)凸轮机构设计题号: 6班级:姓名:学号:同组者:成绩:完成时间:目录一凸轮机构题目要求 (1)二摆杆的运动规律及凸轮轮廓线方程 (2)三计算程序 (3)四运算结果及凸轮机构图 (9)4.1 第一组(A组)机构图及计算结果 (9)4.2 第二组(B组)机构图及计算结果 (14)4.3 第三组(C组)机构图及计算结果 (19)五心得体会 (24)第一组(A组) (24)第二组(B组) (24)第三组(C组) (24)六参考资料 (25)附录程序框图 (26)一凸轮机构题目要求(摆动滚子推杆盘形凸轮机构)题目要求:试用计算机辅助设计完成下列偏置直动滚子推杆盘形凸轮机构或摆动滚子推杆盘形凸轮机构的设计,已知数据如下各表所示。
凸轮沿逆时针方向作匀速转动。
表一摆动滚子推杆盘形凸轮机构的已知参数题号初选的基圆半径R0/mm机架长度Loa/mm摆杆长度Lab/mm滚子半径Rr/mm推杆摆角φ许用压力角许用最小曲率半径[ρamin][α1] [α2]A 15 60 55 10 24°35°70°0.3RrB 20 70 65 14 26°40°70°0.3RrC 22 72 68 18 28°45°65°0.35Rr 要求:1)凸轮理论轮廓和实际轮廓的坐标值2)推程和回程的最大压力角,及凸轮对应的转角3)凸轮实际轮廓曲线的最小曲率4)半径及相应凸轮转角5)基圆半径6)绘制凸轮理论廓线和实际廓线7)计算点数:N:72~120推杆运动规律:1)推程运动规律:等加速等减速运动2)回程运动规律:余弦加速度运动二摆杆的运动规律及凸轮轮廓线方程1)推程:1,运动规律:等加速等减速运动;2,轮廓线方程:A:等加速推程段设定推程加速段边界条件为: 在始点处 δ=0,s=0,v=0。
在终点处 h /2 s ,2/==δοδ。
整理得:⎪⎩⎪⎨⎧===^2^2/*h *4a ^2/**h *4v ^2^2/*h *2s δοωδοδωδοδ( 注意:δ的变化范围为0~δ0/2。
哈工大机械原理大作业_凸轮机构设计(第3题)

机械原理大作业二课程名称:机械原理设计题目:凸轮设计院系:机电学院班级: 1208103完成者: xxxxxxx 学号: ********xx指导教师:**设计时间: 2014.5.2工业大学凸轮设计一、设计题目如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。
二、凸轮推杆升程、回程运动方程及其线图1 、凸轮推杆升程运动方程(650πϕ≤≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,650π=Φ带入正弦加速度运动规律的升程段方程式中得:⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512sin 215650ϕππϕS ;⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-=512cos 1601ππωv ; ⎪⎭⎫ ⎝⎛=512sin 14421ϕπωa ; 2、凸轮推杆推程远休止角运动方程(πϕπ≤≤65) mm h s 50==;0==a v ;3、凸轮推杆回程运动方程(914πϕπ≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,95'0π=Φ,6s π=Φ带入余弦加速度运动规律的回程段方程式中得:⎥⎦⎤⎢⎣⎡-+=)(59cos 125πϕs ; ()πϕω--=59sin451v ; ()πϕω-=59cos 81-a 21;4、凸轮推杆回程近休止角运动方程(πϕπ2914≤≤) 0===a v s ;5、凸轮推杆位移、速度、加速度线图根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。
①位移线图编程如下: %用t 代替转角t=0:0.01:5*pi/6;s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5));hold onplot(t,s);t=5*pi/6:0.01:pi;s=50;hold onplot(t,s);t=pi:0.01:14*pi/9;s=25*(1+cos(9*(t-pi)/5));hold onplot(t,s);t=14*pi/9:0.001:2*pi;s=0;hold onplot(t,s),xlabel('φ/rad'),ylabel('s/mm'); grid onhold off所得图像为:②速度线图编程如下:%用t代替转角,设凸轮转动角速度为1t=0:0.01:5*pi/6;v=60/pi*(1-cos((12*t)/5));hold onplot(t,v);t=5*pi/6:0.01:pi;v=0;hold onplot(t,v);t=pi:0.01:14*pi/9;v=-45*sin(9*(t-pi)/5);hold onplot(t,v);t=14*pi/9:0.01:2*pi;v=0;hold onplot(t,v),xlabel('φ(rad)'),ylabel('v(mm/s)'); grid onhold off所得图像为:③加速度线图利用matlab编程如下:%用t代替转角,设凸轮转动角速度为1t=0:0.01:5*pi/6;a=144/pi*sin(12*t/5);hold onplot(t,a);t=5*pi/6:0.01:pi;a=0;hold onplot(t,a);t=pi:0.01:14*pi/9;a=-81*cos(9*(t-pi)/5);hold onplot(t,a);t=14*pi/9:0.01:2*pi;a=0;hold onplot(t,a),xlabel('φ(rad)'),ylabel('a(mm/s^2)');grid onhold off所得图形:三、绘制s d ds -ϕ线图 根据运动方程求得:()⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧≤≤≤≤-≤≤≤≤--=πϕππϕππϕπϕππϕπππϕ2914.0914,59sin 4565,0650),512cos 6060(d ds 利用matlab 编程:%用t 代替φ,a 代替ds/d φ,t=0:0.01:5*pi/6;a=-(60/pi-60/pi*cos(12*t/5));s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5));hold onplot(a,s);t=5*pi/6:0.01:pi;a=0;s=50;hold onplot(a,s);t=pi:0.01:14*pi/9;a=45*sin(9*(t-pi)/5);s=25*(1+cos(9*(t-pi)/5));hold onplot(a,s);t=14*pi/9:0.01:2*pi;a=0;s=0;hold onplot(a,s),title('ds/d φ-s'),xlabel('ds/d φ(mm/rad)'),ylabel('s(mm)'); grid onhold off得s d ds -ϕ图:凸轮压力角的正切值ss e d ds +-=0/tan ϕα,左侧为升程,作与s 轴夹6π角等于升程许用压力角的切界线t t d D ,则在直线上或其左下方取凸轮轴心时,可使[]αα≤,同理右侧回程,作与s 轴夹角等于回程许用压力角3π的切界线''t t d D ,则在直线上或其右下方取凸轮轴心时,可使[]αα≤。
机械原理大作业——凸轮.docx
大作业(二)凸轮机构设计题号:6班级:姓名:学号:同组者:成绩:完成时间:目录一凸轮机构题目要求 (1)二摆杆的运动规律及凸轮轮廓线方程 (2)三计算程序 (3)四运算结果及凸轮机构图 (9)4.1 第一组(A组)机构图及计算结果 (9)4.2 第二组(B组)机构图及计算结果 (14)4.3 第三组(C组)机构图及计算结果 (19)五心得体会 (24)第一组(A组) (24)第二组(B组) (24)第三组(C组) (24)六参考资料 (25)附录程序框图 (26)一凸轮机构题目要求(摆动滚子推杆盘形凸轮机构)题目要求:试用计算机辅助设计完成下列偏置直动滚子推杆盘形凸轮机构或摆动滚子推杆盘形凸轮机构的设计,已知数据如下各表所示。
凸轮沿逆时针方向作匀速转动。
表一摆动滚子推杆盘形凸轮机构的已知参数题号初选的基圆半径R0/mm机架长度Loa/mm摆杆长度Lab/mm滚子半径Rr/mm推杆摆角φ许用压力角许用最小曲率半径[ρamin][α1] [α2]A 15 60 55 10 24°35°70°0.3RrB 20 70 65 14 26°40°70°0.3RrC 22 72 68 18 28°45°65°0.35Rr 要求:1)凸轮理论轮廓和实际轮廓的坐标值2)推程和回程的最大压力角,及凸轮对应的转角3)凸轮实际轮廓曲线的最小曲率4)半径及相应凸轮转角5)基圆半径6)绘制凸轮理论廓线和实际廓线7)计算点数:N:72~120推杆运动规律:1)推程运动规律:等加速等减速运动2)回程运动规律:余弦加速度运动二摆杆的运动规律及凸轮轮廓线方程1)推程:1,运动规律:等加速等减速运动;2,轮廓线方程:A:等加速推程段设定推程加速段边界条件为:在始点处δ=0,s=0,v=0。
在终点处。
整理得:(注意:δ的变化范围为0~δ0/2。
哈工大机械原理大作业——凸轮——2号

哈工大机械原理大作业——凸轮——2号————————————————————————————————作者:————————————————————————————————日期:Harbin Institute of Technology机械原理大作业课程名称:机械原理设计题目:凸轮机构设计一、设计题目(1)凸轮机构运动简图:(2)凸轮机构的原始参数序号升程升程运动角升程运动规律升程许用压力角回程运动角回程运动规律回程许用压力角远休止角近休止角14 90°120°余弦加速度35°90°3-4-5多项式65°80°70°(1) 推杆升程、回程运动方程如下:A.推杆升程方程:设为1rad sω=升程位移为:()()1cos451cos1.52hsπψψψ⎡⎤⎛⎫=-=-⎢⎥⎪Φ⎝⎭⎣⎦23ψπ≤≤升程速度为:()()1100sin67.5sin1.52hvπωπψψωψ⎛⎫==⎪ΦΦ⎝⎭23ψπ≤≤升程加速度为:()()2221100cos101.25cos1.52haπωπψψωψ⎛⎫==⎪ΦΦ⎝⎭23ψπ≤≤B.推杆回程方程:回程位移为:()()345111110156s h T T T ψ⎡⎤=--+⎣⎦1029918ψπ≤≤ 回程速度为:()()22111103012h v T T T ωψ=--+'Φ 1029918ψπ≤≤ 回程加速度为:()()221111260132h a T T T ωψ=--+'Φ 1029918ψπ≤≤其中:()010s T ψ-Φ+Φ='Φ1029918ψπ≤≤ (2) 利用Matlab 绘制推杆位移、速度、加速度线图 A. 推杆位移线图clcclearx1=linspace(0,2*pi/3,300);x2=linspace(2*pi/3,10*pi/9,300); x3=linspace(10*pi/9,29*pi/18,300); x4=linspace(29*pi/18,2*pi,300); T1=(x3-10*pi/9)/(pi/2); s1=45*(1-cos(1.5*x1)) s2=90;s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5)); s4=0;plot(x1,s1,'r',x2,s2,'r',x3,s3,'r',x4,s4,'r') xlabel('角度ψ/rad'); ylabel('位移s/mm') title('推杆位移线图') gridaxis([0,7,-10,100]) 得到推杆位移线图:B.推杆速度线图clcclearx1=linspace(0,2*pi/3,300);x2=linspace(2*pi/3,10*pi/9,300);x3=linspace(10*pi/9,29*pi/18,300);x4=linspace(29*pi/18,2*pi,300);T1=(x3-10*pi/9)/(pi/2);v1=67.5*1*sin(1.5*x1);v2=0;v3=-30*90*1*T1.^2/(pi/2).*(1-2*T1+T1.^2);v4=0;plot(x1,v1,'r',x2,v2,'r',x3,v3,'r',x4,v4,'r') xlabel('角度ψ/rad');ylabel('速度v/(mm/s)')title('推杆速度线图')Grid得到推杆速度线图:C.推杆加速度线图clcclearx1=linspace(0,2*pi/3,300);x2=linspace(2*pi/3,10*pi/9,300);x3=linspace(10*pi/9,29*pi/18,300);x4=linspace(29*pi/18,2*pi,300);T1=(x3-10*pi/9)/(pi/2);a1=101.25*1.^2.*cos(1.5*x1);a2=0;a3=-60.*90.*T1./((pi/2).^2).*(1-3*T1+2*T1.^2); a4=0;plot(x1,a1,'r',x2,a2,'r',x3,a3,'r',x4,a4,'r') xlabel('角度ψ/rad');ylabel('加速度a/')title('推杆加速度线图')Grid得到推杆加速度线图:三、凸轮机构的ds/dψ-s线图,并依次确定凸轮的基圆半径和偏距.1、凸轮机构的ds/dψ--s线图:x1=linspace(0,2*pi/3,300);x2=linspace(2*pi/3,10*pi/9,300);x3=linspace(10*pi/9,29*pi/18,300);x4=linspace(29*pi/18,2*pi,300);T1=(x3-10*pi/9)/(pi/2);s1=45*(1-cos(1.5*x1))s2=90;s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5));s4=0;v1=67.5*1*sin(1.5*x1);v2=0;v3=-30*90*1*T1.^2/(pi/2).*(1-2*T1+T1.^2);v4=0;plot(v1,s1,'r',v2,s2,'r',v3,s3,'r',v4,s4,'r')xlabel('ds/dψ');ylabel('(位移s/mm)')title('ds/dψ—s曲线')gridaxis([-120,80,-10,100])得到ds/dψ—s曲线:2、确定凸轮的基圆半径和偏距:在dssdϕ-线图中,右侧曲线为升程阶段的类速度-位移图,作直线D t d t与其相切,且与位移轴正方向呈夹角[α1]=350, 故该直线斜率:32sin2=tan5533cos2okϕϕ⨯=⨯通过编程求其角度。
机械原理大作业2_凸轮机构设计

机械原理⼤作业2_凸轮机构设计1. 设计题⽬第32题:升程/mm 升程运动⾓/。
升程运动规律升程许⽤压⼒⾓/。
回程运动⾓/。
回程运动规律回城许⽤压⼒⾓/。
远休⽌⾓/。
近休⽌⾓/。
150120余弦加速度 35 90 正弦加速度65 55 952.运动⽅程式及运动线图本实验假设凸轮逆时针旋转。
(1)确定凸轮机构推杆升程、回程运动⽅程,并绘制推杆位移、速度、加速度线图。
(设定⾓速度为ω= 2π/3.)升程:( 0 <φ< 2π/3)由公式:;v =πh ω/(2)sin(); a = /(2) cos().由此得:s = 75*(1 - cos(1.5*φ));v=0.225/2 * ω * sin(1.5 *φ); a = 0.675/4 *φ^2 .* cos(1.5*φ);回程:( 35*π/36 <φ< 53*π/36)由公式 s = h[1 – T/ + 1/2πsin(2πT/)];v = - h ω/[1 –cos(2πT/)];a = -2πh sin(2πT/) ; T = φ–()得到s= 0.150*(53/18 - 2*φ/π + 1/(2*π)*sin (4*φ- 35* π/9)); v = -0.300/π * ω* (1 - cos(4*φ- 35*π/9)); a = -1.200 *φ^2/π*sin(4*φ- 35*π/9);由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录)1. 凸轮机构的sd ds-?线图及基圆半径和偏距的确定2.凸轮机构的s d ds-?线图如下图所⽰(代码详见附录):确定凸轮基圆半径与偏距:见下页:基圆半径为r 0 = 142mm ,偏距e = 20mm 。
3. 滚⼦半径的确定及凸轮理论廓线和实际廓线的绘制得到的理论轮廓曲线为:求其最⼩曲率半径 = 90.0051= 10mm。
这⾥取半径为 rr程序代码见附录3.凸轮轮廓绘制得到的外包络轮廓,得到图线为:得到的内包络线图为:这⾥取内包络线图。
机械原理大作业2-凸轮机构设计
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:机电工程学院姓名:学号:班级:指导教师:1.设计题目设计直动从动件盘形凸轮机构,其原始参数见表1 表一:凸轮机构原始参数升程(mm ) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)30 70 等加等减速30 170 正弦加速度60 100 1202.凸轮推杆运动规律(1)推程运动规律(等加速等减速运动)推程035≤ϕ0≤推程0070≤ϕ35≤(2)回程运动规律(正弦加速度)回程00240≤ϕ170≤开始输入初始参数运行各部分程序输出1 输出2 输出3 输出4 结束从动件位移、速度、加速度曲线ds/dψ-s曲线,确定基圆半径和偏距理论轮廓线上的压力角和曲率半径图绘制理论轮廓线和实际轮廓线3.运动线图及凸轮s d ds -φ线图采用Matlab 编程,其所有源程序见附页:令可得运动规律图如下:1.凸轮的基圆半径和偏距以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。
得图如下:得最小基圆对应的坐标位置大约为(20,-35)经计算取偏距e=20mm,r0=40.3mm.2.绘制理论轮廓线上的压力角曲线和曲率半径曲线针对凸轮转向及推杆偏置,令N1=1凸轮逆时针转;N2=1偏距为正。
压力角数学模型:曲率半径数学模型:)/)(/()/)(/(])/()/[(22222/322ϕϕϕϕϕϕρd x d d dy d y d d dx d dy d dx -+= 其中:)sin(])/[()cos(])/(2[/102212122ϕϕϕϕϕN s s d s d N e N N d ds d x d --+-=)cos(])/[()(sin ])/(2[/202212122ϕϕϕϕϕN s s d s d N e N N d ds d y d --+--=3.凸轮理论廓线和实际廓线理论廓线数学模型:ϕϕϕϕsin cos )(cos sin )(00e s s y e s s x -+=++=凸轮实际廓线坐标方程式:22'22')/()/()/()/()/()/(ϕϕϕϕϕϕd dy d dx d dy r y y d dy d dx d dx r x x tt+-=++=其中rt 为确定的滚子半径。
哈工大机械原理大作业2凸轮机构设计
机械原理大作业(二)作业名称:凸轮机构设计设计题目:23题院系:班级:设计者:学号:指导教师:设计时刻:哈尔滨工业大学机械设计1.运动分析题目:设计直动从动件盘形凸轮机构,其原始参数见下表2.确信凸轮机构推杆升程、回程运动方程(设定角速度为ω=10 rad/s)升程:0°< Φ < 120°由公式可得:s=60-60*cos(3*Φ/2);v=90*ω*sin(3*Φ/2);a=135*ω2 *cos(3*Φ/2);远停止:120°< Φ < 200°由公式可得:s=120;v=0;a=0;回程:200°< Φ < 290°由公式可得:s=h[1-(10T23-15T24+6T25)]v=(-30hω1/Φ0')T22(1–2T2+T22)a=(-60hω12/Φ0'2)T2(1–3T2+2T22)式中:T2=(Φ-Φ0-Φs)/ Φ0'近停止: 290°< Φ < 360°由公式可得:s=0;v=0;a=0;3.绘制推杆位移、速度、加速度线图(设ω=10rad/s)1) 推拉位移曲线代码:%推杆位移曲线;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));m=(29*pi/18):(pi/1000):(2*pi);s4=0;plot(x,s1,'b',y,s2,'b',z,s3,'b',m,s4,'b'); xlabel('角度(rad)');ylabel('行程(mm)');title('推杆位移曲线');grid;2)推杆速度曲线代码:%推杆速度曲线;w=10;x=0:(pi/1000):(2*pi/3);v1=90*w*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);v2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;v3=(-30*120*w/(pi/2))*T2.^2.*(1-2*T2.^2+T2.^2); % v3=-120*w*sin(2*z-20*pi/9);m=(29*pi/18):(pi/1000):(2*pi);v4=0;plot(x,v1,'r',y,v2,'r',z,v3,'r',m,v4,'r'); xlabel('角度(rad)');ylabel('速度(mm/s)');title('推杆速度曲线(w=10rad/s)');grid;3)凸轮推杆加速度曲线代码:%凸轮推杆加速度曲线;w=10;x=0:(pi/1000):(2*pi/3);a1=135*w^2*cos(3*x/2);y=(2*pi/3):(pi/1000):(10*pi/9);a2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;a3=(-60*120*w^2/(pi/2)^2)*T2.*(1-3*T2.^2+2*T2.^2); m=(29*pi/18):(pi/1000):(2*pi);a4=0;plot(x,a1,'m',y,a2,'m',z,a3,'m',m,a4,'m');xlabel('角度(rad)');ylabel('加速度(mm/s^2)');title('凸轮推杆加速度曲线(w=10rad/s)');grid;4)绘制凸轮机构的dd/dd−d线图,并依次确信凸轮的基圆半径和偏距代码:%dd/dd−d线图,确信e,s0;x=0:(pi/1000):(2*pi/3);s1=60-60*cos(1.5*x);ns1=90*sin(1.5*x);y=(2*pi/3):(pi/1000):(10*pi/9);s2=120;ns2=0;z=(10*pi/9):(pi/1000):(29*pi/18);T2=(z-10*pi/9)*2/pi;s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));ns3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m=(29*pi/18):(pi/1000):(2*pi);s4=0;ns4=0;x1=0:pi/36000:pi/2;s1n=60-60*cos(1.5*x1);v1=90*sin(1.5*x1);m1=diff(s1n);%求切线1n1=diff(v1);z=m1./n1;for i=1:length(z);if abs(z(i)+tan(-55*pi/180))<0.001;breakendendb11=s1n(i)-z(i)*v1(i);x1=-300:200;y01=z(i)*x1+b11;%切线1k1=z(i);plot(x1,y01)x3=10*pi/9:pi/36000:14*pi/9;%求切线2s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));v3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4 ;m3=diff(s3n);n3=diff(v3);p=m3./n3;for o=1:length(p);if abs(p(o)-tan(-25*pi/180))<0.01;breakendendo;b33=s3n(o)-p(o)*v3(o);x3=-300:700;y03=p(o)*x3+b33;%切线2plot(x3,y03);sym uv[u,v]=solve('u= 1.4281*v-81.7665','u=-0.4663*v-59.6715');%v=11.66332347972972972972972972973 x%u=-65.110107738597972972972972972973 yplot(ns1,s1,'m',ns2,s2,'b',ns3,s3n,'b',ns4,s4,'b',x1,y01,'g',x3,y03,'g',v,u,'*'); xlabel('ds/d¦µ');ylabel('S');axis([-300,200,-300,300]);title('s0,e 的确信');grid;确信凸轮基圆半径与偏距:偏距e=90mm,d020mm;基圆半径为d0=150mm。
机械原理大作业2凸轮机构大作业..
大作业(二)凸轮机构设计(题号:_________)班级:________________________ 学号:________________________ 姓名:________________________ 同组其他人员:________________________ 完成日期:________________________凸轮机构大作业题目目录1、题目及原始数据;2、推杆的运动规律及凸轮廓线方程;3、计算程序框图4、计算程序;5、计算结果及分析;6、凸轮机构图(包括推杆及凸轮理论和实际廓线,并标出有关尺寸及计算结果7、体会及建议8、参考书利用计算机辅助设计完成下列偏置式直动滚子推杆盘形凸轮机构(推杆的移动副导路位于凸轮盘回转中心的右侧)或摆动滚子推杆盘形凸轮机构的设计,设计已知数据如下表所示,机构中凸轮沿着逆时针方向做匀速转动。
表1 两种凸轮机构的从动件运动规律表2 两种凸轮机构的推杆在近休、推程、远休及回程阶段的凸轮转角表3 偏置直动滚子推杆盘形凸轮机构的已知参数要求:每两人一组,每组中至少打印出一份源程序。
每人都要打印:原始数据;凸轮理论轮廓曲线和实际轮廓曲线的坐标值;推程和回程的最大压力角,以及出现最大压力角时凸轮相应的转角,凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角;凸轮的基圆半径。
整个设计过程所选取的计算点数N=72~120。
利用计算机绘出凸轮的理论轮廓曲线和实际轮廓曲线。
二、推杆运动规律及凸轮轮廓方程推程: 等加速2202/s h δδ=远休:s h =等减速22002()/s h h δδδ=--回程 : 五次多项式整理得;345121212s=h[1-10(()/)+15(()/)6(()/)]o o o δδδδδδδδδδδδ-------理论轮廓廓线方程00()sin cos ()cos sin x s s e y s s e δδδδ=++=+-工作廓线方程cos sin t t x x r y y r δδ=-=-实际廓线方程sin (/)/cos (/)/dx d dy d θδθδ==-'cos 'sin r r x x r y y r θθ=-=-三、计算程序框图四、计算程序#include<stdio.h>#include<math.h>#include<stdlib.h>#define PI 3.141592653double fact[72][2];double theory[72][2];int ang1=180,ang2=225,ang3=315; double h=35, rb=20,b=1;double A1=30*PI/180, A2=75*PI/180; double P=18.2,e=10;double So,r=15;double S(int I){double s;double A;double B;if(I<=ang1/2){A=I*PI/180;B=ang1*PI/180;s=2*h*pow(A/B,2);}else if((I>ang1/2)&&(I<=ang1)){A=I*PI/180;B=ang1*PI/180;s=h-2*h*pow((B-A)/B,2);}else if(I<=ang2)s=h;else if(I<=ang3){A=(I-ang2)*PI/180;B=(ang3-ang2)*PI/180;s=h*(1-10*pow(A/B,3)+15*pow(A/B,4)-6*pow(A/B,5));}else s=0;return(s);}double ds(int Q){double A,B,C;if(Q<=ang1/2){A=Q*PI/180;B=ang1*PI/180;C=4*h*A/(B*B);}else if((Q>ang1/2)&&(Q<=ang1)){A=Q*PI/180;B=ang1*PI/180;C=4*h*(B-A)/(B*B);}else if(Q<=ang2) C=0;else if(Q<=ang3){A=(Q-ang2)*PI/180;B=(ang3-ang2)*PI/180;C=h*(-30*A*A/pow(B,3)+60*pow(A,3)/pow(B,4)-30*pow(A,4)/pow(B,5));}else C=0;return C;}double dss(int B3){double A,B,C;if(B3<=ang1/2){A=B3*PI/180;C=ang1*PI/180;B=4*h/(C*C);}else if(B3>ang1/2&&B3<=ang1){A=B3*PI/180;C=ang1*PI/180;B=-4*h/(C*C);}else if(B3<=ang2)B=0;else if(B3<=ang3){A=(B3-ang2)*PI/180;C=(ang3-ang2)*PI/180;B=h*(-60*A/pow(C,3)+240*A*A/pow(C,4)-120*A*A*A/pow(C,5));}else B=0;return(B);}void xy(int ang){double A,B,C,E,F,dx,dy;A=ang*PI/180;B=S(ang);C=ds(ang);dx=(So+B)*cos(A)+sin(A)*C-e*sin(A);dy=-sin(A)*(So+B)+C*cos(A)-e*cos(A);E=r*dy/sqrt(dx*dx+dy*dy);F=r*dx/sqrt(dx*dx+dy*dy);theory[ang/5][0]=(So+B)*sin(A)+e*cos(A);theory[ang/5][1]=(So+B)*cos(A)-e*sin(A);fact[ang/5][0]=theory[ang/5][0]-E;fact[ang/5][1]=theory[ang/5][1]+F;}double a(int B1)/*****求解压力角****/{double A,B;A=sqrt((ds(B1)-e)*(ds(B1)-e));B=S(B1);return atan(A/(B+So));}double p(int B2){double dx,dy,dxx,dyy;double A,B,C,D,E;A=B2*PI/180;B=ds(B2);C=S(B2);D=dss(B2);dx=(So+C)*cos(A)+sin(A)*B-e*sin(A);dy=-sin(A)*(So+C)+B*cos(A)-e*cos(A);dxx=-(C+So)*sin(A)+cos(A)*B+D*sin(A)-e*cos(A);dyy=-cos(A)*(So+C)-B*sin(A)+D*cos(A)-sin(A)*B+e*sin(A);E=sqrt(pow(dx*dx+dy*dy,3))/sqrt(pow((dx*dyy-dxx*dy),2));return(E);}void main(){ FILE *fp;int i;int k,h,l;double angle1max=0,angle2max=0,pmin=1000;if((fp=fopen("sanying","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 4\n");fprintf(fp," x y x' y' ");//计算数据并写入文件for(;i!=360;){rb=rb+b;So=sqrt(rb*rb-e*e);for(i=0;i<=ang1;i=i+5){if(a(i)>A1||p(i)<P)break;}if(ang1+5-i)continue;for(i=ang1+5;i<=ang2;i=i+5){if(p(i)<P)break;}if(ang2+5-i)continue;for(i=ang2+5;i<=ang3;i=i+5){if(a(i)>A2||p(i)<P)break;}if(ang3+5-i)continue;for(i=ang3+5;i<360;i=i+5){if(p(i)<P)break;}}for(i=0;i<360;i=i+5){xy(i);}for(i=0;i<=ang1;i=i+5){if(angle1max<a(i)){angle1max=a(i);k=i;}if(pmin>p(i)){pmin=p(i);h=i;}}for(i=ang2;i<=ang3;i=i+5){if(angle2max<a(i)){angle2max=a(i);l=i;}if(pmin>p(i)){pmin=p(i);h=i;}}for(i=0;i<72;i++){fprintf(fp,"\n");{fprintf(fp,"%12.3f\t%12.3f\t%12.3f\t%12.3f\t",theory[i][0],theory[i][1],fact[i][0],fact[i][1]);}}fclose(fp);printf(" 理论坐标(x,y) ");printf("实际坐标(x,y)");printf("\n");for(i=0;i<72;i++){printf("%f ",theory[i][0]);printf(" ");printf("%f ",theory[i][1]);printf(" ");printf("%f ",fact[i][0]);printf(" ");printf("%f ",fact[i][1]);printf("\n");}printf("基圆半径是:%f\n",rb);printf("推程最大压力角是:%f\n",angle1max*180/PI);printf("此时角度是是:%d\n",k);printf("回程最大压力角是:%f\n",angle2max*180/PI);printf("此时角度是是:%d\n",l);printf("最小曲率半径是:%f\n",pmin);printf("此时角度是:%d\n",h);}五、计算结果及分析-58.095654100.403660-65.608023113.386892 -49.123827105.084964-55.476046118.673537 -39.778138108.966507-44.921863123.057004 -30.129713112.018750-34.025797126.503933 -20.251983114.218463-22.870774128.988091 -10.220123115.548903-11.541691130.490572 -0.110482115.999947-0.124769130.999941分析基圆半径是:116.000000推程最大压力角是:5.273246 此时角度是是:90回程最大压力角是:21.408137 此时角度是是:275最小曲率半径是:18.384284 此时角度是:315-200-1000100200-200-1000100200理论坐标y 实际坐标y(六)心得体会在解决大作业过程中不仅仅让自己更熟悉课本知识同时使得自己重温C 语言让自己更加熟练与程序的设计,提高了自己的逻辑运用能力,这种对运行的机构的认识,我相信对以后的理论知识求解也有帮助。
机械原理大作业-凸轮作业24题(作业试题)

升程
(mm)
升程运
动角
( )
升程运
动规律
升程
许用
压力角
( )
回程运
动角
( )
回程运
动规律
回程
许用
压力角
( )
远休
止角
( )
近休
止角
( )
120
150
正弦加速度
40
100
余弦加速度
60
50
60
2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度,运动线图
(1)推杆升程,回程方程运动方程如下:
x2=5*pi/6:0.001:pi;
y2=0;
x3=pi:0.001:14*pi/9;
y3=-117*sin(1.8*x3-1.8*pi);
x4=14*pi/9:0.001:2*pi;
y4=0;
plot(x1,y1,x2,y2,x3,y3,x4,y4);
C.推杆加速度线图
Matlab程序:
x1=0:0.001:5*pi/6;
y=60+60*cos(9*(t-10*pi/9)/5);
holdon
plot(x,y,'-r');
t=15*pi/9:0.01:2*pi;
x=0;
y=0;
holdon
plot(x,y,'-r');
gridon
holdoff
如上图所示,在这三条直线所围成的公共许用区域,只要在公共许用区域内选定凸轮轴心O的位置,凸轮基圆半径r0和偏距e就可以确定了。
y3=60+60*cos(9*(x3-10*pi/9)/5);
机械原理大作业(二)-凸轮机构设计

机械原理大作业(二)凸轮机构设计(题号:1—B)班级:05020402姓名:学号:时间:2006/12/4一、题目及原始数据:凸轮机构的推杆在近休,推程,远休及回程段的凸轮转角近休:0——45°推程:45°--210°远休:210°--260°回程:260°--360°偏置直动滚子推杆盘行凸轮机构已知参数基圆半径 r0=20mm偏距 e=+10mm滚子半径 r1=14mm推杆行程 h=30mm许用压力角α1=30°α2=75°许用最小曲率半径ρ=0.3*14mm二、推杆运动规律及凸轮轮廓曲线方程:推程: (等加速等减速运动)加速期:s=2hδ2/δ02减速期:S=h-2h(δ-δ0)2/δ02回程: (余弦加速度运动) s=h[1+cos(πδ/δ0')]/2 轮廓线方程:x=(s0+s)*sinδ+e*cosδ;y=(s0+s)*cosδ-e*sinδ;s0=sqrt(r*r-e*e);三、计算源程序:#include "stdio.h"#include "math.h"#define n 120#define pi 3.1415926#define a pi/180.0main (){ int r0,r1,h,e,i;doubleangle0,angle1,angle2,angle3,angle4,angle,angle01,angle02,angle03,angle1m,angle2m,angle3m,angle0 m1,angle0m2,rm,r3,r4,r,s,s0,m,m1;float r2,x11,y11,b;double x,x1,x2,y,y1,y2,t,t0,t1,t2;r0=20;r1=14;h=30;e=10;r4=10000;angle1=45*a;angle2=165*a;angle3=50*a;angle4=100*a;angle01=30*a;angle02=75*a;r=1;rm=4.2;angle0m1=-1000;angle0m2=-1000;b=3.1415926*2/n;fp=fopen("zf.txt","w");for (i=0;i<n;i++){s0=sqrt(r0*r0-e*e);angle=i*b;if (angle<=angle1){s=0;m=0;m1=0;}if((angle>angle1)&&(angle<(angle1+angle2/2))){s=2*h*(angle-angle1)*(angle-angle1)/(angle2*angle2);m=4*h*(angle-angle1)/(angle2*angle2);m1=4*h/(angle2*angle2);}elseif((angle<=angle1+angle2)&&(angle>=(angle1+angle2/2))){s=h-2*h*(angle-angle1-angle2)*(angle-angle1-angle2)/(angle2*angle2);m=4*h*(angle-angle1-angle2)/(angle2*angle2);m1=-4*h/(angle2*angle2); }if (angle>(angle1+angle2)&&angle<=(angle1+angle2+angle3)){s=h;m=0;m1=0;}if (angle>(angle1+angle2+angle3)&&angle<=(angle1+angle2+angle3+angle4)){s=h*(1+cos(3.1415926*(angle-angle1-angle2-angle3)/angle4))/2;m=h*(1-3.1415926/angle4*sin(3.1415926*(angle-angle1-angle2-angle3)/angle4))/2;m1=h*(1-3.1415926/angle4*3.1415926/angle4*cos(3.1415926*(angle-angle1-angle2-angle3)/angle4)) /2;}x=(s0+s)*sin(angle)+e*cos(angle);y=(s0+s)*cos(angle)-e*sin(angle);x1=(m-e)*sin(angle)+(s0+s)*cos(angle);y1=(m-e)*cos(angle)-(s0+s)*sin(angle);x11=(m1-s0-s)*sin(angle)+(2*m-e)*cos(angle);y11=(m1-s0-s)*cos(angle)-(m1+m-e)*sin(angle);t0=sqrt(x1*x1+y1*y1);t1=x1/t0;t2=-y1/t0;x2=x-r1*t2;y2=y-r1*t1;fprintf(fp,"X=%8f,Y=%8f,X'=%8f,Y'=%8f\r\n", x,y,x2,y2,angle);angle0=atan(fabs((m-e))/(s0+s));if(angle>(angle1+angle2+angle3)&&angle<=(angle1+angle2+angle3+angle4)) if(angle0>angle02){r0=r0+r;i=0;continue;}else{ if(angle0>angle0m2){angle0m2=angle0;angle2m=angle; }}elseif(angle0>angle01){r0=r0+r;i=0;continue;}else{ if(angle0>angle0m1){angle0m1=angle0;angle1m=angle; }}t=sqrt(x1*x1+y1*y1);r2=(x1*x1+y1*y1)*t/(x1*y11-x11*y1);if(r2>0) continue;elseif(-r2-r1>=rm){r3=-r2;if(r3<r4){r4=r3;angle3m=angle;}}else {r0=r0+r;i=0;continue;}}fprintf(fp,"angle0m1=%8f,angle1m=%8f,angle0m2=%8f,angle2m=%8f\r\n",angle0m1,angle1m,angle 0m2,angle2m );fprintf(fp,"r4=%8f,angle3m=%8f,r0=%d,\r\n",r4,angle3m ,r0);fclose(fp);}四、计算结果:X理:15.224368 Y理论:34.816930 X实:8.012825 Y实:18.324700 角度:0.034907X理:16.430187 Y理论:34.264398 X实:8.647467 Y实:18.033894 角度:0.069813X理:17.615988 Y理论:33.670120 X实:9.271573 Y实:17.721116 角度:0.104720X理:18.780327 Y理论:33.034820 X实:9.884383 Y实:17.386747 角度:0.139626X理:19.921785 Y理论:32.359272 X实:10.485150 Y实:17.031196 角度:0.174533X理:21.038972 Y理论:30.890773 X实:11.647645 Y实:16.258301 角度:0.244346X理:23.195117 Y理论:30.099611 X实:12.207956 Y实:15.841900 角度:0.279253X理:24.231448 Y理论:29.271777 X实:12.753394 Y实:15.406198 角度:0.314159X理:25.238257 Y理论:28.408280 X实:13.283293 Y实:14.951726 角度:0.349066X理:26.214317 Y理论:27.510172 X实:13.797009 Y实:14.479038 角度:0.383972X理:27.158439 Y理论:26.578547 X实:14.293915 Y实:13.988709 角度:0.418879X理:28.069473 Y理论:25.614540 X实:14.773407 Y实:13.481337 角度:0.453786X理:28.946309 Y理论:24.619326 X实:15.234899 Y实:12.957540 角度:0.488692X理:29.787877 Y理论:23.594117 X实:15.677894 Y实:12.417876 角度:0.523599X理:30.597738 Y理论:22.547499 X实:16.238226 Y实:11.693725 角度:0.558505X理:31.380498 Y理论:21.487419 X实:16.781649 Y实:10.957767 角度:0.593412X理:32.136687 Y理论:20.414132 X实:17.308378 Y实:10.210150 角度:0.628319X理:32.866804 Y理论:19.327822 X实:17.818601 Y实:9.451001 角度:0.663225X理:33.571317 Y理论:18.228604 X实:18.312475 Y实:8.680423 角度:0.698132X理:34.250653 Y理论:17.116533 X实:18.790127 Y实:7.898500 角度:0.733038X理:34.905199 Y理论:15.991601 X实:19.251651 Y实:7.105296 角度:0.767945X理:35.535294 Y理论:14.853745 X实:19.697110 Y实:6.300855 角度:0.802851X理:36.141226 Y理论:13.702849 X实:20.126535 Y实:5.485205 角度:0.837758X理:36.723230 Y理论:12.538747 X实:20.539923 Y实:4.658354 角度:0.872665X理:37.281479 Y理论:11.361229 X实:20.937237 Y实:3.820292 角度:0.907571X理:37.816091 Y理论:10.170047 X实:21.318405 Y实:2.970995 角度:0.942478X理:38.327115 Y理论:8.964915 X实:22.031842 Y实:1.238504 角度:1.012291X理:39.278267 Y理论:6.511511 X实:22.363791 Y实:0.355173 角度:1.047198X理:39.718153 Y理论:5.262536 X实:22.678949 Y实:-0.539666 角度:1.082104X理:40.133964 Y理论:3.998215 X实:22.977064 Y实:-1.446122 角度:1.117011X理:40.525395 Y理论:2.718161 X实:23.257841 Y实:-2.364318 角度:1.151917X理:40.892067 Y理论:1.421981 X实:23.520946 Y实:-3.294393 角度:1.186824 X理:41.233521 Y理论:0.109286 X实:23.766004 Y实:-4.236496 角度:1.221730X理:41.549225 Y理论:-1.220309 X实:23.992595 Y实:-5.190790 角度:1.256637 X理:41.838566 Y理论:-2.567176 X实:24.200257 Y实:-6.157445 角度:1.291544 X理:42.100855 Y理论:-3.931668 X实:24.388482 Y实:-7.136640 角度:1.326450 X理:42.335325 Y理论:-5.314117 X实:24.556716 Y实:-8.128557 角度:1.361357 X理:42.541133 Y理论:-6.714823 X实:24.704357 Y实:-9.133381 角度:1.396263 X理:42.717361 Y理论:-8.134052 X实:24.830754 Y实:-10.151294角度:1.431170 X理:42.863017 Y理论:-9.572031 X实:24.935204 Y实:-11.182474角度:1.466077 X理:42.977036 Y理论:-11.028939 X实:25.016957 Y实:-12.227089角度:1.500983 X理:43.058283 Y理论:-12.504905 X实:25.075207 Y实:-13.285293角度:1.535890 X理:43.105554 Y理论:-13.999999 X实:25.109100 Y实:-14.357222角度:1.570796 X理:43.117583 Y理论:-15.514232 X实:25.117724 Y实:-15.442991角度:1.605703 X理:43.093039 Y理论:-17.047545 X实:25.100120 Y实:-16.542684角度:1.640609 X理:43.030531 Y理论:-18.599806 X实:25.055273 Y实:-17.656355角度:1.675516 X理:42.928616 Y理论:-20.170809 X实:24.982117 Y实:-18.784019角度:1.710423 X理:42.785796 Y理论:-21.760262 X实:24.879535 Y实:-19.925647角度:1.745329 X理:42.600528 Y理论:-23.367789 X实:24.746359 Y实:-21.081163角度:1.780236 X理:42.371224 Y理论:-24.992923 X实:24.581374 Y实:-22.250433角度:1.815142 X理:42.096259 Y理论:-26.635099 X实:24.383318 Y实:-23.433268角度:1.850049 X理:41.773975 Y理论:-28.293658 X实:24.150885 Y实:-24.629410角度:1.884956 X理:41.402684 Y理论:-29.967833 X实:23.882726 Y实:-25.838535角度:1.919862 X理:40.980677 Y理论:-31.656754 X实:23.577457 Y实:-27.060242角度:1.954769 X理:40.506228 Y理论:-33.359442 X实:23.233655 Y实:-28.294048角度:1.989675 X理:39.977599 Y理论:-35.074804 X实:22.849868 Y实:-29.539388角度:2.024582 X理:39.393048 Y理论:-36.801635 X实:22.424617 Y实:-30.795607角度:2.059489 X理:38.750832 Y理论:-38.538610 X实:30.996081 Y实:-22.294723角度:2.094395 X理:38.034505 Y理论:-40.275093 X实:30.635951 Y实:-23.865906角度:2.129302 X理:37.229060 Y理论:-41.998368 X实:30.195071 Y实:-25.429633角度:2.164208 X理:36.334928 Y理论:-43.703821 X实:29.673680 Y实:-26.981747角度:2.199115 X理:35.352771 Y理论:-45.386865 X实:29.072232 Y实:-28.518112角度:2.234021 X理:34.283477 Y理论:-47.042954 X实:28.391390 Y实:-30.034623角度:2.268928 X理:33.128164 Y理论:-48.667589 X实:27.632027 Y实:-31.527214角度:2.303835 X理:31.888169 Y理论:-50.256336 X实:26.795224 Y实:-32.991867角度:2.338741 X理:30.565053 Y理论:-51.804829 X实:25.882264 Y实:-34.424625角度:2.373648 X理:29.160590 Y理论:-53.308787 X实:24.894633 Y实:-35.821603角度:2.408554 X理:27.676767 Y理论:-54.764018 X实:23.834010 Y实:-37.178990角度:2.443461X理:26.115775 Y理论:-56.166435 X实:22.702269 Y实:-38.493066角度:2.478368 X理:24.480008 Y理论:-57.512061 X实:21.501469 Y实:-39.760208角度:2.513274 X理:22.772056 Y理论:-58.797042 X实:20.233853 Y实:-40.976899角度:2.548181 X理:20.994696 Y理论:-60.017654 X实:18.901839 Y实:-42.139736角度:2.583087 X理:19.150889 Y理论:-61.170311 X实:17.508017 Y实:-43.245441角度:2.617994 X理:17.243771 Y理论:-62.251576 X实:16.055139 Y实:-44.290865角度:2.652900 X理:15.276645 Y理论:-63.258169 X实:14.546115 Y实:-45.272999角度:2.687807 X理:13.252975 Y理论:-64.186972 X实:12.984005 Y实:-46.188982角度:2.722714 X理:11.176377 Y理论:-65.035040 X实:11.372013 Y实:-47.036103角度:2.757620 X理:9.050611 Y理论:-65.799606 X实:9.713475 Y实:-47.811815 角度:2.792527 X理:6.879570 Y理论:-66.478087 X实:8.011857 Y实:-48.513735 角度:2.827433 X理:4.667275 Y理论:-67.068092 X实:6.270741 Y实:-49.139653 角度:2.862340 X理:2.417862 Y理论:-67.567427 X实:4.493819 Y实:-49.687538 角度:2.897247 X理:0.135574 Y理论:-67.974100 X实:2.684885 Y实:-50.155542 角度:2.932153 X理:-2.175249 Y理论:-68.286327 X实:0.847824 Y实:-50.542004 角度:2.967060 X理:-4.510181 Y理论:-68.502536 X实:-1.013396 Y实:-50.845455角度:3.001966 X理:-6.864718 Y理论:-68.621368 X实:-2.894735 Y实:-51.064624角度:3.036873 X理:-9.234291 Y理论:-68.641684 X实:-4.792090 Y实:-51.198438角度:3.071779 X理:-11.614274 Y理论:-68.562570 X实:-6.701303 Y实:-51.246026角度:3.106686 X理:-13.999998 Y理论:-68.383332 X实:-8.618173 Y实:-51.206722角度:3.141593 X理:-16.386759 Y理论:-68.103506 X实:-10.538466 Y实:-51.080066角度:3.176499 X理:-18.769828 Y理论:-67.722852 X实:-12.457925 Y实:-50.865809角度:3.211406 X理:-21.144466 Y理论:-67.241362 X实:-14.372278 Y实:-50.563908角度:3.246312 X理:-23.505932 Y理论:-66.659256 X实:-16.277251 Y实:-50.174531角度:3.281219 X理:-25.849493 Y理论:-65.976983 X实:-18.168578 Y实:-49.698054角度:3.316126 X理:-28.170439 Y理论:-65.195221 X实:-20.042008 Y实:-49.135065角度:3.351032 X理:-30.464088 Y理论:-64.314875 X实:-21.893321 Y实:-48.486359角度:3.385939 X理:-32.725805 Y理论:-63.337076 X实:-23.718330 Y实:-47.752936角度:3.420845 X理:-34.951002 Y理论:-62.263178 X实:-25.512901 Y实:-46.936005角度:3.455752 X理:-37.135160 Y理论:-61.094758 X实:-27.272952 Y实:-46.036974角度:3.490658 X理:-39.273831 Y理论:-59.833608 X实:-28.994473 Y实:-45.057452角度:3.525565 X理:-41.362653 Y理论:-58.481737 X实:-30.673528 Y实:-43.999244角度:3.560472 X理:-43.397357 Y理论:-57.041364 X实:-32.306269 Y实:-42.864349角度:3.595378 X理:-45.373781 Y理论:-55.514913 X实:-33.888943 Y实:-41.654952角度:3.630285 X理:-47.287876 Y理论:-53.905008 X实:-35.417601 Y实:-40.373690角度:3.665191 X理:-49.140327 Y理论:-52.221847 X实:-36.805047 Y实:-39.113039角度:3.700098 X理:-50.932908 Y理论:-50.475062 X实:-38.147651 Y实:-37.804734角度:3.735005X理:-52.663435 Y理论:-48.666781 X实:-39.443779 Y实:-36.450371角度:3.769911 X理:-54.329801 Y理论:-46.799207 X实:-40.691850 Y实:-35.051598角度:3.804818 X理:-55.929973 Y理论:-44.874616 X实:-41.890345 Y实:-33.610121角度:3.839724 X理:-57.462004 Y理论:-42.895352 X实:-43.037803 Y实:-32.127695角度:3.874631 X理:-58.924025 Y理论:-40.863826 X实:-44.132826 Y实:-30.606126角度:3.909537 X理:-60.314257 Y理论:-38.782514 X实:-45.174080 Y实:-29.047268角度:3.944444 X理:-61.631006 Y理论:-36.653952 X实:-46.160296 Y实:-27.453020角度:3.979351 X理:-62.872666 Y理论:-34.480732 X实:-47.090273 Y实:-25.825326角度:4.014257 X理:-64.037726 Y理论:-32.265503 X实:-47.962878 Y实:-24.166167角度:4.049164 X理:-65.124766 Y理论:-30.010963 X实:-48.777047 Y实:-22.477565角度:4.084070 X理:-66.132461 Y理论:-27.719860 X实:-49.531789 Y实:-20.761578角度:4.118977 X理:-67.059584 Y理论:-25.394984 X实:-50.226184 Y实:-19.020296角度:4.153884 X理:-67.905005 Y理论:-23.039168 X实:-50.859387 Y实:-17.255841角度:4.188790 X理:-68.667695 Y理论:-20.655283 X实:-51.430625 Y实:-15.470362角度:4.223697 X理:-69.346723 Y理论:-18.246232 X实:-51.939202 Y实:-13.666035角度:4.258603 X理:-69.941264 Y理论:-15.814951 X实:-52.384500 Y实:-11.845058角度:4.293510 X理:-70.450591 Y理论:-13.364403 X实:-52.765975 Y实:-10.009650角度:4.328417 X理:-70.874085 Y理论:-10.897571 X实:-53.083164 Y实:-8.162046 角度:4.363323 X理:-71.211231 Y理论:-8.417463 X实:-53.335678 Y实:-6.304498 角度:4.398230 X理:-71.461616 Y理论:-5.927099 X实:-53.523211 Y实:-4.439270 角度:4.433136 X理:-71.624936 Y理论:-3.429514 X实:-53.645535 Y实:-2.568632 角度:4.468043 X理:-71.700992 Y理论:-0.927751 X实:-53.702499 Y实:-0.694865 角度:4.502949 X理:-71.689692 Y理论:1.575143 X实:-53.694035 Y实:1.179748 角度:4.537856 X理:-71.591049 Y理论:4.076118 X实:-53.620154 Y实:3.052924 角度:4.572763 X理:-71.405183 Y理论:6.572126 X实:-53.480944 Y实:4.922381 角度:4.607669 X理:-71.132321 Y理论:9.060128 X实:-53.276577 Y实:6.785840 角度:4.642576 X理:-70.772796 Y理论:11.537091 X实:-53.007300 Y实:8.641032 角度:4.677482 X理:-70.327044 Y理论:13.999997 X实:-52.673441 Y实:10.485697 角度:4.712389 X理:-69.795610 Y理论:16.445847 X实:-52.275408 Y实:12.317586 角度:4.747296 X理:-69.179140 Y理论:18.871661 X实:-51.813686 Y实:14.134467 角度:4.782202 X理:-68.478387 Y理论:21.274482 X实:-51.288837 Y实:15.934129 角度:4.817109 X理:-67.694203 Y理论:23.651383 X实:-50.701500 Y实:17.714377 角度:4.852015 X理:-66.827543 Y理论:25.999469 X实:-48.967984 Y实:23.755335 角度:4.886922 X理:-65.826230 Y理论:28.304563 X实:-48.198716 Y实:24.661658 角度:4.921828 X理:-64.641138 Y理论:30.545434 X实:-47.354426 Y实:25.528507 角度:4.956735 X理:-63.277589 Y理论:32.708746 X实:-46.436309 Y实:26.354907 角度:4.991642 X理:-61.742338 Y理论:34.781770 X实:-45.445180 Y实:27.139606 角度:5.026548X理:-60.043499 Y理论:36.752532 X实:-44.381628 Y实:27.880902 角度:5.061455 X理:-58.190457 Y理论:38.609954 X实:-43.246217 Y实:28.576525 角度:5.096361 X理:-56.193761 Y理论:40.343979 X实:-42.039706 Y实:29.223604 角度:5.131268 X理:-54.065005 Y理论:41.945689 X实:-40.763271 Y实:29.818699 角度:5.166175 X理:-51.816696 Y理论:43.407404 X实:-39.418688 Y实:30.357907 角度:5.201081 X理:-49.462114 Y理论:44.722769 X实:-38.008483 Y实:30.837009 角度:5.235988 X理:-47.015156 Y理论:45.886825 X实:-36.536027 Y实:31.251667 角度:5.270894 X理:-44.490184 Y理论:46.896056 X实:-35.005558 Y实:31.597628 角度:5.305801 X理:-41.901856 Y理论:47.748429 X实:-33.422163 Y实:31.870935 角度:5.340707 X理:-39.264965 Y理论:48.443405 X实:-31.791688 Y实:32.068114 角度:5.375614 X理:-36.594271 Y理论:48.981938 X实:-30.120610 Y实:32.186351 角度:5.410521 X理:-33.904333 Y理论:49.366454 X实:-28.415872 Y实:32.223619 角度:5.445427 X理:-31.209352 Y理论:49.600808 X实:-26.684679 Y实:32.178772 角度:5.480334 X理:-28.523011 Y理论:49.690231 X实:-24.934287 Y实:32.051606 角度:5.515240 X理:-25.858326 Y理论:49.641248 X实:-23.171771 Y实:31.842866 角度:5.550147 X理:-23.227508 Y理论:49.461596 X实:-21.403787 Y实:31.554223 角度:5.585054 X理:-20.641836 Y理论:49.160111 X实:-19.636335 Y实:31.188218 角度:5.619960 X理:-18.111538 Y理论:48.746612 X实:-17.874522 Y实:30.748173 角度:5.654867 X理:-15.645690 Y理论:48.231769 X实:-16.122329 Y实:30.238080 角度:5.689773 X理:-13.252132 Y理论:47.626960 X实:-14.382380 Y实:29.662480 角度:5.724680 X理:-10.937397 Y理论:46.944124 X实:-12.655715 Y实:29.026329 角度:5.759586 X理:-8.706659 Y理论:46.195602 X实:-10.941579 Y实:28.334888 角度:5.794493 X理:-6.563697 Y理论:45.393977 X实:-9.237212 Y实:27.593631 角度:5.829400 X理:-4.510882 Y理论:44.551909 X实:-7.537676 Y实:26.808219 角度:5.864306 X理:-2.549177 Y理论:43.681970 X实:-5.835723 Y实:25.984552 角度:5.899213 X理:-0.678160 Y理论:42.796486 X实:-4.121776 Y实:25.128959 角度:5.934119 X理:1.103938 Y理论:41.907374 X实:-2.384077 Y实:24.248559 角度:5.969026 X理:2.800176 Y理论:41.025993 X实:-0.609152 Y实:23.351818 角度:6.003933 X理:4.414829 Y理论:40.162996 X实:1.217241 Y实:22.449289 角度:6.038839 X理:5.953300 Y理论:39.328197 X实:3.108484 Y实:21.554424 角度:6.073746 X理:7.422014 Y理论:38.530446 X实:5.074646 Y实:20.684161 角度:6.108652 X理:8.828300 Y理论:37.777519 X实:7.119318 Y实:19.858831 角度:6.143559 X理:10.180267 Y理论:37.076022 X实:9.236299 Y实:19.100791 角度:6.178466 X理:11.486659 Y理论:36.431311 X实:11.407342 Y实:18.431486 角度:6.213372 X理:12.756712 Y理论:35.847426 X实:13.602413 Y实:17.867304 角度:6.248279推程最大压力角0.601797 此时的角度2.094395回程最大压力角0.621338 此时的角度5.724680 曲率半径最小值25.000000 此时的角度0.034907 基圆半径38六、运动线图及分析:凸轮理论廓线凸轮实际廓线七. 体会。
哈工大机械原理大作业二凸轮机构
void main()
{
float fi=0,fi0=90,h=100,S=0,v=0,a=0,fis=110,fi01=80,fis1=80,T2=0,w1=10,A=0,B=0,v0=0,v01=0,v02=0,f11=30,f31=70,A11=0,A12=0,B11=0,B12=0,A21=0,A22=0,B21=0,C11=0,C21=0,W=0;
{
W=fi*2*PI/360.0;
if(fi<=90)
{
S=h*(W/fi0-(1/(2*PI))*sin((2*PI/fi0)*W));
v=(h*w1/fi0)*(1-cos((2*PI/fi0)*W));
a=(2*PI*h*w1*w1/(fi0*fi0))*sin(2*PI*W/fi0);
}
elseif(fi>=90&&fi<200)
{
A=90;
A=A*2*PI/360.0;
S=h*(A/fi0-(1/(2*PI))*sin((2*PI/fi0)*A));
v=(h*w1/fi0)*(1-cos((2*PI/fi0)*A));
a=(2*PI*h*w1*w1/(fi0*fi0))*sin(2*PI*A/fi0);
}
elseif(fi>=200&&fi<=280)
}
printf("%f\n",a);
}
}
此程序计算推杆位移,速度,加速度线图。
程序二:
#include "stdio.h"
#include "math.h"
(完整word版)哈工大机械原理大作业凸轮DOC
H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目: 凸轮机构设计院系:班级:设计者:学号:指导教师:哈尔滨工业大学一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数,据此设计该凸轮机构。
凸轮机构原始参数序号升程(mm)升程运动角升程运动规律升程许用压力角27130150正弦加速度30°回程运动角回程运动规律回程许用压力角远休止角近休止角100°余弦加速度60°30°80°二. 凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图凸轮推杆升程运动方程:)]512sin(2156[130s ϕππϕ-= )512sin(4.374)]512cos(1[156v 211ϕπϕπωω=-=a% t 表示转角,s 表示位移t=0:0.01:5*pi/6;%升程阶段s= [(6*t)/(5*pi )- 1/(2*pi )*sin(12*t/5)]*130; hold on plot(t ,s ); t= 5*pi/6:0。
01:pi; %远休止阶段s=130; hold on plot(t,s );t=pi :0.01:14*pi/9;%回程阶段s=65*[1+cos(9*(t-pi )/5)]; hold on plot(t ,s );t=14*pi/9:0.01:2*pi ;s=0;hold onplot(t,s);grid onhold off%t表示转角,令ω1=1t=0:0。
01:5*pi/6;%升程阶段v=156*1*[1-cos(12*t/5)]/pi hold onplot(t,v);t= 5*pi/6:0。
01:pi;v=0hold onplot(t,v);t=pi:0.01:14*pi/9;%回程阶段v=—117*1*sin(9*(t—pi)/5) hold onplot(t,v);t=14*pi/9:0。
02-机械原理大作业-凸轮机构
序号
升程 (mm) 100
升程运 动规律 正弦加速度
18
升程 许用 压力角 ( ) 40
回程运 动规律 等减等加速
2.确定凸轮推杆升程、回程运动方程
(1)推杆升程运功方程(0 < φ ≤ Φ0 = 150°) 推程为正弦加速度运动规律,因此,运动方程为: ������ 1 2������ s = h[ − sin ( ������)] Φ0 2������ Φ0 v= ℎ������ 2������ ( ������)] [1 − cos Φ0 Φ0 2������ℎ������2 Φ0
如图 2-1 所示直动从动件盘形凸轮机构,其原始参数见表 2-1。从表 2-1 中选择一组凸 轮机构的原始参数,据此设计该凸轮机构。
图 2-1 表 2-1 升程运 动角 ( ) 150 凸轮机构原始参数 回程运 动角 ( ) 100 回程 许用 压力角 ( ) 60 远休 止角 ( ) 70 近休 止角 ( ) 40
′2
Φ0 2
′
′
= 270°时
[������ − (Φ0 + Φ������ )]2
v=−
4ℎ������ Φ0
′2
[������ − (Φ0 + Φ������ )]
a=−
4ℎ������2 Φ0
′2
其中 h=100mm,Φ0 = 150°,Φ������ = 70°,Φ0 = 100°,������ = 10rad/s。 b)在270° = Φ0 + Φ������ +
3
凸轮机构设计 VB 编程
Call S2 Picture2.PSet (i, v), RGB(255, 0, 0) Next i For i = 270 To 320 Step 0.01 φ = i * pa Call S3 Picture2.PSet (i, v), RGB(255, 0, 0) Next i For i = 320 To 360 Step 0.01 φ = i * pa v = 0 Picture2.PSet (i, v), RGB(255, 0, 0) Next i End Sub Private Sub Command3_Click() '加速度 a 曲线 Picture3.Scale (-50, 15000)-(380, -15000) '定义坐标系 Picture3.Line (0, 0)-(380, 0) '画 x 轴 Picture3.Line (0, 15000)-(0, -15000) '画 y 轴 For i = 0 To 360 Step 30 '竖直网格线 Picture3.DrawStyle = 2 Picture3.Line (i, 15000)-(i, -15000) Picture3.CurrentX = i - 14: Picture3.CurrentY = -2 Picture3.Print i Picture3.CurrentX = 365: Picture3.CurrentY = 1800 Picture3.Print "φ" Next i For i = -14000 To 14000 Step 2000 '水平网格线 Picture3.DrawStyle = 2 Picture3.Line (0, i)-(370, i) Picture3.CurrentX = -50: Picture3.CurrentY = i + 500 Picture3.Print i Picture3.CurrentX = 10: Picture3.CurrentY = 15700 Picture3.Print "a" Next i Picture3.DrawWidth = 2 For i = 0 To 150 Step 0.01 φ = i * pa Call S1 Picture3.PSet (i, a), RGB(255, 0, 0) Next i
机械原理大作业凸轮..
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:1308108设计者:仲星光学号:1130810816指导教师:林琳设计时间:2015年6月7日一、设计题目如图所示直动从动件盘形凸轮机构,其原始参数见表,据此设计该凸轮机构。
行程(mm)升程运动角(°)升程运动规律升程许用压力角(°)回程运动角(°)回程运动规律回程许用压力角(°)远休止角(°)近休止角(°)6080余弦加速度30 60 摆抛摆60 100 120二.数学计算方法(设计书中所给出的回程运动方程有误)1.理论轮廓和工作轮廓廓线方程正偏置平面凸轮,反转法,小滚子中心在反转运动中的轨迹即为凸轮的理论轮廓,推杆所在直线一直与偏心圆相切,由几何关系可得盘形凸轮理论轮廓线方程为:滚子从动件盘形凸轮的实际轮廓线是以理论轮廓上各点为圆心,以小滚子半径为半径的圆族的包络线,理论廓线B点相对应的实际廓线B'点的方程为:2.压力角3.凸轮轮廓曲率半径由数学分析知,凸轮理论轮廓曲线上任一点的曲率半径的计算公式为:(以上方程来自《基于MatLab语言的机构设计与分析》上海科学技术出版社)三.MatLab程序程序设计流程1.主程序:推杆位clc;clear;h=60;%行程phi01=80;%推程运动角phis1=100;%远休止角phi02=60;%回程运动角phis2=120;%近休止角alpha1=pi/6;%升程许用压力角alpha2=pi/3;%回程许用压力角omiga=1;%凸轮角速度设为1%计算凸轮转角、从动件位移,速度和加速度%绘制从动件位移、速度、加速度线图[psi,s,v,a]=CanShuJiSuan(h,phi01,phis1,phi02,phis2,... omiga,alpha1,alpha2);e=22;r0=57;%由ds/dpsi-s图像确定基圆半径和偏距%计算凸轮轮廓线曲率半径及压力角%绘制凸轮理论轮廓线上的压力角线图和曲率半径图[ang,rou,DxDpsi,DyDpsi]=YaLiJiao_QuLvBanJin( r0,psi,s, v,a,e,omiga );Rr=9;%由曲率半径最小值确定小滚子半径%计算凸轮轮廓曲线%绘制理论和实际轮廓曲线LunKuoXian( r0,psi,s,e,Rr,DxDpsi,DyDpsi );2.余弦加速运动规律子函数function [ s1,v1,a1,psi1 ] = Yuxian( phi01,h,omiga )%计算余弦加速度运动规律psi1=linspace(0,phi01,round(phi01));s1=(h/2).*[1 - cos(pi.*psi1./phi01)];v1=(pi*h*omiga./(2.*(phi01*pi/180))) .*sin(pi.*psi1./phi01);a1=pi^2*h*omiga^2/(2*(phi01*pi/180)^2)*cos(pi.*psi1./p hi01)end3.远休止程子函数function [ s2,v2,a2,psi2 ] = YuanXiu( phi01,phis1,h ) psi2=linspace(phi01+1,phi01+phis1,round(phis1));s2=h*psi2./psi2;v2=0*psi2;a2=0*psi2;end4.摆抛摆子函数function [ s3,v3,a3,psi3 ] =BaiPaoBai( phi01,phis1,phi02,h,omiga )%计算回程摆线-抛物线-摆线运动规律%计算当phi01+phis1<psi<=phi01+phis1+phi02/8时,从动件的位移、速度、加速度psi3_1=linspace(phi01+phis1+phi02/8/100,phi01+phis1+ph i02/8,100);s3_1=h-h*(2*(psi3_1-phi01-phis1)/phi02-sin(4*pi*(psi3_ 1-phi01-phis1)/...phi02)/(2*pi))/(2+pi);v3_1=-2*h*omiga*(1-cos(4*pi*(psi3_1-phi01-phis1)/phi02 ))/((2+pi)*...phi02*pi/180);a3_1=-8*h*pi*omiga^2*sin(4*pi*(psi3_1-phi01-phis1)/phi 02)/((2+pi)*...(phi02*pi/180)^2);%计算当phi01+phis1<psi<=phi01+phis1+3*phi02/8时,从动件的位移、速度、加速度psi3_2=linspace(phi01+phis1+phi02/8+phi02/4/100,phi01+ phis1+3*phi02/8,100);s3_2=h-h*(4*pi*((psi3_2-phi01-phis1).^2)/(phi02^2)-(pi -2)*(psi3_2-phi01...-phis1)/phi02+pi/16-1/(2*pi))/(2+pi);v3_2=-h*omiga*(8*pi*(psi3_2-phi01-phis1)/phi02-pi+2)/( (2+pi)*phi02*pi/180);a3_2=-8*h*pi*omiga^2/((2+pi)*(phi02*pi/180)^2)*psi3_2. /psi3_2;%计算当phi01+phis1<psi<=phi01+phis1+5*phi02/8时,从动件的位移、速度、加速度psi3_3=linspace(phi01+phis1+3*phi02/8+phi02/4/100,phi0 1+phis1+5*phi02/8,100);s3_3=h-h*(2*(pi+1)*(psi3_3-phi01-phis1)/phi02-pi/2-sin (4*pi*(psi3_3-phi01...-phis1)/phi02-pi)/(2*pi))/(2+pi);v3_3=-2*h*omiga*(pi+1-cos(4*pi*(psi3_3-phi01-phis1)/ph i02-pi))/((2+pi)...*phi02*pi/180);a3_3=-8*h*pi*omiga^2*sin(4*pi*(psi3_3-phi01-phis1)/phi 02-pi)/((2+pi)*...(phi02*pi/180)^2);%计算当phi01+phis1<psi<=phi01+phis1+7*phi02/8时,从动件的位移、速度、加速度psi3_4=linspace(phi01+phis1+5*phi02/8+phi02/4/100,phi0 1+phis1+7*phi02/8,100);s3_4=h-h*(-4*pi*((psi3_4-phi01-phis1).^2)/(phi02^2)+(7 *pi+2)*(psi3_4-...phi01-phis1)/phi02-33*pi/16+1/(2*pi))/(2+pi);v3_4=-h*omiga*(-8*pi*(psi3_4-phi01-phis1)/phi02+7*pi+2 )/((2+pi)*phi02*pi/180);a3_4=8*h*pi*omiga^2/((2+pi)*(phi02*pi/180)^2)*psi3_4./ psi3_4;%计算当phi01+phis1<psi<=phi01+phis1+phi02时,从动件的位移、速度、加速度psi3_5=linspace(phi01+phis1+7*phi02/8+phi02/8/100,phi0 1+phis1+phi02,100);s3_5=h-h*(2*(psi3_5-phi01-phis1)/phi02+pi-sin(4*pi*(ps i3_5-phi01-phis1).../phi02-2*pi)/(2*pi))/(2+pi);v3_5=-2*h*omiga*(1-cos(4*pi*(psi3_5-phi01-phis1)/phi02 -2*pi))/((2+pi)...*phi02*pi/180);a3_5=-8*h*pi*omiga^2*sin(4*pi*(psi3_5-phi01-phis1)/phi 02-2*pi)/((2+pi)...*(phi02*pi/180)^2);%输出回程阶段凸轮的转角、从动件的位移速度加速度的数组s3=[s3_1,s3_2,s3_3,s3_4,s3_5];v3=[v3_1,v3_2,v3_3,v3_4,v3_5];a3=[a3_1,a3_2,a3_3,a3_4,a3_5];psi3=[psi3_1,psi3_2,psi3_3,psi3_4,psi3_5];end5.近休止程子函数function [ s4,v4,a4,psi4 ] =JinXiu( phi01,phis1,phi02,phis2 )psi4=linspace(phi01+phis1+phi02+1,phi01+phis1+phis2+ph i02,round(phis2));s4=0*psi4;v4=0*psi4;a4=0*psi4;End6.参数计算及图像绘制[s1,v1,a1,psi1]=YuXian(phi01,h,omiga);%推程[s2,v2,a2,psi2]=YuanXiu(phi01,phis1,h);%远休程[s3,v3,a3,psi3]=BaiPaoBai(phi01,phis1,phi02,h,omiga);%回程[s4,v4,a4,psi4]=JinXiu(phi01,phis1,phi02,phis2);%近休程psi=[psi1,psi2,psi3,psi4];%凸轮转角s=[s1,s2,s3,s4];%从动件位移v=[v1,v2,v3,v4];%从动件速度a=[a1,a2,a3,a4];%从动件加速度%绘制从动件位移、速度、加速度线图figure(1)subplot(3,1,1)plot(psi,s);grid onxlabel('凸轮转角(度)');ylabel('位移(mm)');subplot(3,1,2);plot(psi,v);grid onxlabel('凸轮转角(度)');ylabel('速度(mm/s)');subplot(3,1,3)plot(psi,a);grid onxlabel('凸轮转角(度)');ylabel('加速度(mm/s^2)');%绘制ds/dphi-s线图,并确定凸轮基圆半径和偏距DsDphi=v/omiga;figure(2)plot(DsDphi,s);hold onx1=-150:100;y1=tan(pi/2-alpha1)*(x1-65.26)+22.33; plot(x1,y1);hold ony2=tan(pi/2+alpha2)*(x1+107.6)+22.36; plot(x1,y2);7.轮廓线绘制if Rr==0x=x0;y=y0;elseA=sqrt(DxDpsi.^2+DyDpsi.^2);x=x0+Rr*DyDpsi./A;y=y0-Rr*DxDpsi./A;endfigure(4)plot(r0.*cos(psi.*pi/180),r0.*sin(psi.*pi/180),'-.',.. .x0,y0,'--',x,y,e*cos(psi.*pi/180),e*sin(psi.*pi/180)); grid on;legend('基圆','凸轮理论轮廓','凸轮实际轮廓','偏距圆');axis equalend8.压力角曲线及曲率半径function[ang,rou,DxDpsi,DyDpsi]=YaLiJiao_QuLvBanJin( r0,psi,s, v,a,e,omiga )s0=sqrt(r0.^2-e.^2);rs1=s0+s;ang=abs(atan((v/omiga-e)./rs1))*180/pi;DxDpsi=(v./omiga-e).*sin(psi.*pi/180)+...(s0+s).*cos(psi.*pi/180);DyDpsi=(v./omiga-e).*cos(psi.*pi/180)-...(s0+s).*sin(psi.*pi/180);DDxDpsi=(a./(omiga^2)-(s0+s)).*sin(psi.*pi/180)... +(2*v./omiga-e).*cos(psi.*pi/180);DDyDpsi=(a./(omiga^2)-(s0+s)).*cos(psi.*pi/180)... +(2*v./omiga-e).*sin(psi.*pi/180);A=(DxDpsi.^2+DyDpsi.^2).^1.5;B=abs(DxDpsi.*(DDyDpsi)-DyDpsi.*(DDxDpsi));rou=A./B;%凸轮理论轮廓曲率半径%绘图figure(3)axis onplotyy(psi,rou,psi,ang);%绘制曲率半径图[AX]=plotyy(psi,rou,psi,ang);set(AX(1),'yTick',[0:20:200]);set(AX(2),'yTick',[0:10:100]);end四.程序运行结果与生成图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮机构设计院系:机电工程学院班级: 1208106 设计者:张文奇学号: 1120810610 指导教师:丁刚设计时间: 2014年5月24日凸轮机构设计1.设计题目(1) 凸轮机构运动简图:(2)凸轮机构的原始参数 序号升程升程运动角 升程运动规律 升程许用压力角 回程运动角 回程运动规律 回程许用压力角 远休止角 近休止角 10 80mm90°余弦加速度30°80°余弦加速度70°100°90°2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度线图(1) 推杆升程,回程运动方程如下:(设:凸轮运动角速度为1 rad/s )A.推杆升程方程:转角:20πϕ≤≤位移: ϕϕφπ2cos 4040)]cos(1[20-=-=h s 速度: ϕϕφπφωπ2sin 80)sin(200==h v 加速度: ϕϕφπφπ2cos 160)cos(20222==hw aB.推杆回程方程:转角:231819πϕπ≤≤ 位移: {()[]⎪⎭⎫⎝⎛-+=+-+=πϕφφϕφπ375.249cos 4040}'cos 1200s h s 速度: ()[]⎪⎭⎫⎝⎛--=+--=πϕφφϕφπφωπ375.249sin 90'sin '2000s h v 加速度: ()[]⎪⎭⎫⎝⎛--=+--=πϕφφϕφπφωπ375.249cos 5.202'cos'200222s h a(2)推杆位移,速度,加速度线图如下:A.推杆位移线图(使用Matlab 画图,程序详见附录1)B.推杆速度线图(使用Matlab画图,程序详见附录2)C.推杆加速度线图(使用matlab画图,程序详见附录3)3.凸轮机构的ds s-线图,并依次确定凸轮的基圆半径和偏距dϕ(1) 凸轮机构的dssdϕ-线图:(使用Matlab画图,程序详见附录4)(2)确定凸轮的基圆半径和偏距由图知:可取S0=100mm,e=50mm即:基圆半径R0=111.80mm4.滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制可取滚子半径r=10mm,则凸轮理论轮廓和实际轮廓如下:(使用matlab画图,程序详见附录5)附录附录1% t表示转角,s表示位移%升程阶段t=0:0.001:1*pi/2;s=40-40*cos(2*t);hold onplot(t,s);%远休止阶段t=1*pi/2:0.001:19*pi/18;s=80;hold onplot(t,s);%回程阶段t=19*pi/18:0.001:3*pi/2;s=40+40*cos(9*t/4-2.375*pi);hold onplot(t,s);%近休止阶段t=3*pi/2:0.001:2*pi;s=0;hold onplot(t,s);grid onhold off附录2% t表示转角,纵坐标v*ω1=推杆速度。
%升程阶段t=0:0.001:1*pi/2;v=80*sin(2*t);hold onplot(t,v);% 远休止阶段t=1*pi/2:0.001:19*pi/18;v=0;hold onplot(t,v);% 回程阶段t=19*pi/18:0.001:3*pi/2;v=-90*sin(9*t/4-2.375*pi); hold onplot(t,v);%近休止阶段t=3*pi/2:0.001:2*pi;v=0;hold onplot(t,v);grid onhold off附录3% t表示转角,纵坐标推杆加速度%升程阶段t=0:0.001:1*pi/2;a=160*cos(2*t);hold onplot(t,a);% 远休止阶段t=1*pi/2:0.001:19*pi/18;a=0;hold onplot(t,a);% 回程阶段t=19*pi/18:0.001:3*pi/2;a=-202.5*cos(9*t/4-2.375*pi); hold onplot(t,a);%近休止阶段t=3*pi/2:0.001:2*pi;a=0;hold on;plot(t,a);grid on附录4% t表示转角,s表示位移,v表示速度%升程阶段t=0:0.001:1*pi/2;s=40-40*cos(2*t);v=80*sin(2*t);hold onplot(v,s);% 远休止阶段t=1*pi/2:0.001:19*pi/18;s=80;v=0;hold onplot(v,s);% 回程阶段t=19*pi/18:0.001:3*pi/2;s=40+40*cos(9*t/4-2.375*pi);v=-90*sin(9*t/4-2.375*pi);hold onplot(v,s);% 近休止阶段t=3*pi/2:0.001:2*pi;s=0;v=0;hold onplot(v,s);附录5h=80;w=1;e=50;rr=10;s0=100;q=90*pi/180;qs=(100+90)*pi/180;q1=270*pi/180; for i=1:1:90qq(i)=i*pi/180.0;s1=h/2.*( 1-cos(2*qq(i)));v1=h*sin(2*qq(i));x(i)=(s0+s1)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s1)*cos(qq(i))-e*sin(qq(i))+v1/w*sin(qq(i)); b(i)=-(s0+s1)*sin(qq(i))-e*cos(qq(i))+v1/w*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)-rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=91:1:190qq(i)=i*pi/180;s2=h;v2=0;x(i)=(s0+s2)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s2)*cos(qq(i))-e*sin(qq(i))+v2/w*sin(qq(i));b(i)=-(s0+s2)*sin(qq(i))-e*cos(qq(i))+v2/w*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)-rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=191:1:270qq(i)=i*pi/180;s3=h/2+h/2*cos(9*qq(i)/4-2.375*pi);v3=-90*sin(9*qq(i)/4-2.375*pi);x(i)=(s0+s3)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+s3)*cos(qq(i))-e*sin(qq(i))+v3/w*sin(qq(i));b(i)=-(s0+s3)*sin(qq(i))-e*cos(qq(i))+v3/w*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)-rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endfor i=271:1:360qq(i)=i*pi/180;x(i)=(s0+0)*sin(qq(i))+e*cos(qq(i));y(i)=(s0+0)*cos(qq(i))-e*sin(qq(i));a(i)=(s0+0)*cos(qq(i))-e*sin(qq(i))+v3/w*sin(qq(i));b(i)=-(s0+0)*sin(qq(i))-e*cos(qq(i))+v3/w*cos(qq(i));xx(i)=x(i)+rr*b(i)/sqrt(a(i)*a(i)+b(i)*b(i));yy(i)=y(i)-rr*a(i)/sqrt(a(i)*a(i)+b(i)*b(i));endplot(x,y,'r',xx,yy,'g')text(0,20,'实际轮廓线')text(120,100,'理论轮廓线')hold on。