Truetime网络仿真
基于TrueTime工具箱的网络控制系统及其在电机控制上的应用

第25卷第1期上海电力学院学报Vol .25,No .1 2009年2月Journal of Shanghai U niversity of E lectric Pow erFeb . 2009 文章编号:1006-4729(2009)01-0023-05基于TrueT i m e 工具箱的网络控制系统及其在电机控制上的应用 收稿日期:2008-08-27(特约稿)作者简介:程启明(1965-),男,教授,硕士生导师,江苏盐城人.主要研究方向为智能控制、电厂自动化等.E 2mail:chengqi m ing@sina .com.基金项目:上海市教委重点科研项目(06ZZ69);上海市教委重点学科建设项目(J51301);上海市电站自动化技术重点实验室资助项目.程启明,郭瑞青,杜许峰,夏 征(上海电力学院电力与自动化工程学院,上海 200090)摘 要:在引出了网络控制系统概念的基础上,分析了网络控制系统的特性及存在的问题,介绍了NCS 的仿真工具箱TrueTi m e 的组成、功能.以直流电机为对象,建立了一个基于TrueTi m e 的NCS 仿真模型,并进行了控制仿真分析.关键词:网络控制系统;TrueTi m e 工具箱;网络时延;网络调度;实时控制;直流电机中图分类号:TP273 文献标识码:AThe Network Control Syste m Based on TrueTi m e Toolbox and Its Appli cati on i n DC M otor ControlCHENG Q i 2m ing,G UO Rui 2qing,DU Xu 2feng,X I A Zheng(School of Electric Po w er &A uto m ation Engineering,Shanghai U niversityof Electric Po w er ,Shanghai 200090,China )Abstract : The concep t of NCS is intr oduced,the characters and the disadvantages of NCS are analyzed,and the components and functi ons of TrueTi m e t oolbox for NCS si m ulati on are als o intr oduced;then,the NCS si m ulati on model of DC mot or based on TrueTi m e is built,and finally the contr ol si m ulati on on this p latf or m is discussed .Key words : net w ork contr ol syste m;TrueTi m e t oolbox;net w ork ti m e 2delay;net w ork scheduling;real 2ti m e contr ol;DC mot or 近年来,计算机网络技术的飞速发展,引发了控制技术的深刻变革及其相应控制新理论的产生.通过网络形成闭环的反馈控制系统被称为网络控制系统(Net w ork Contr ol Syte m ,NCS )[125],NCS 的理论是20世纪90年代中后期发展起来的新兴控制理论,它已成为当前自动控制技术发展的热点之一.NCS 具有系统连线少、扩展方便、诊断维护简单、灵活性高、可实现资源共享及远程控制等优点,现已广泛地应用于自动化制造工厂、电厂、机器人、航天航空器和电气化运输工具等许多复杂的工业过程中.TrueTi m e 软件包为NCS 理论的仿真研究提供了简易可行、功能齐全的手段,摆脱了软件编程实现特定的网络通讯协议和通信延时所带来的困难,支持控制与实时调度同时仿真,可以方便地仿真实时系统中的控制和资源调度问题.本文介绍了NCS 系统及TrueTi m e 软件包,并讨论利用基于Matlab /Si m ulink 的TrueTi m e 工具包构建直流电机网络控制系统的仿真平台.1 网络控制系统图1为传统控制系统的结构框图.它是点对点连接的控制系统,采用专线连接控制器和被控对象.图1 传统控制系统的结构而NCS 的传感器、控制器、执行器等都通过共同的通讯介质如总线相连,各部分之间可以实现点对点的对等通讯.由于控制网络是一种彻底的分布式控制结构,因此具有系统少、可靠性高、易于扩展以及信息源共享等特点.NCS 可分为远程和局域两种,其中远程NCS 主要用于实现遥操作、遥医学、远程教学和试验等,而局域NCS 则应用于网络家电、蓝牙技术、办公系统和计算机集成制造系统等. 图2为NCS 的总体结构.图2 网络控制系统的总体结构 由图2可知,NCS 是许多控制器和被控对象组成的控制系统集合,它们通过网络连接,控制回路可能有几条,每条回路都可能影响其他的控制回路,传感器、控制器和执行器可以散布到网络各处,以便对某些大型过程进行控制.在NCS 中,每一个直接与网络连接的系统部件称为节点,每个节点可以根据需要和自身的硬件配置执行多个不同任务.监控计算机通过网络接收现场控制层的数据,执行优化算法,并通过网络将优化后的参数下载到现场控制层的相关节点中.图3为图2中一对控制器和被控对象的闭环系统结构,控制回路中测量信号和控制信号都通过网络来收发信号,由此产生两种网络延时.图3 一对控制器和被控制对象的闭环系统结构NCS 主要研究如何实现对控制系统进行实时可靠的网络控制,而网络自身特点造成了NCS 的复杂性[6-9].NCS 的主要特点如下.(1)控制系统所有的设备通过网络实现数据的通讯,系统内部的所有控制设备都应具有网络通讯能力,控制系统通过通讯网络形成闭环.(2)网络通讯介质必须是共享和开放的.网络不但可以被控制系统内部的智能控制节点访问,而且可以满足控制回路外部其他设备的通讯需求.(3)网络上多用户共享通信线路且流量变化不规则;传输数据流经众多计算机和通信设备且路径不是唯一的;数据单元在传输中由于网络阻塞、连接中断等原因会导致时序错乱、数据包丢失.因此,NCS 中的数据传输必然存在时延、丢包、多包传输和网络调度等问题,系统设计必须考虑并解决由此产生的网络带宽和实时性问题.由于网络中信息流存在非线性动力学特性,网络作为闭环反馈控制的一部分和非线性被控对象组成的闭环系统是一个时延变化或不确定的复杂非线性系统.NCS 设计的主要目标是有效地利用有限的总线能力,协调控制算法与资源调度的密切关系,以维持良好的闭环系统性能.在NCS 中以数据包的形式将检测信号和控制信号发送出去,传感器通常是以时间驱动的方式周期性地将检测信号数据包发送给控制器,控制器和执行器则可以是事件驱动的,也可以是时间驱动的.在事件驱动方式下,当一个数据包到达控制器时,控制器才计算一个新的控制量,此时执行器也是事件驱动的,是在一个控制量数据包到达时触发动作而执行;控制器和执行器也可以都42上 海 电 力 学 院 学 报 2009年是时间驱动的,此时两者都以定常时间间隔方式计算或执行最新接收到的数据包信息.2 TrueT i m e工具箱网络的性能测量及评估是NCS能够应用到实际环境中不可缺少的一环.仿真研究是网络化控制系统理论研究的一个重要内容.网络仿真是利用相关的软件技术,构造网络拓扑、实现网络协议、测评网络性能的网络虚拟技术,它包括网络拓扑仿真、协议仿真和通信流量仿真.目前主要的网络仿真软件有以下3种[10].(1)TrueTi m e 是由瑞典Lund工学院Dan Henrikss on和Ant on Cervin等1999年研制出的软件包,它为NCS理论的仿真研究提供了简易可行、功能齐全的手段,能与Matlab/Si m ulink软件包中的其他控制模块相结合,简便快速地搭建分布式的实时控制系统和NCS.(2)NS2 是由美国加州大学的LNBL网络研究组于1989年开发的一个网络仿真软件,具有良好的开放性和扩展性.利用它可以构造各种网络拓扑结构,实现网络协议,测试网络性能,也可以实现新协议和算法的扩充及验证.(3)NCS2Si m u 是由英国Sussex大学开发的网络控制仿真软件包,主要适用在网络统计特征已知的情况下对网络控制性能进行分析仿真研究.另外,还有ST RESS,DRTSS,J itter Bug,Gl o Mo2 Si m,BONeS,COMNETⅢ,SSF Net,OP NET等仿真软件.本文仅介绍TrueTi m e仿真工具箱.TrueTi m e 可以构建分布式实时控制系统的动态过程、控制任务执行及网络交互的联合仿真环境,可以研究各种调度策略和网络协议对控制系统性能的影响.它的主要功能有:研究因强占或者传输延时等时间不定性对控制性能的影响;设计时变系统的控制器,并进行系统补偿;进行灵活的动态调度方法仿真实验;用于仿真事件驱动的控制系统等方面的研究;进行基于多网络平台下的系统仿真.TrueTi m e仿真软件包的优点如下.(1)由于该仿真软件中的计算机模块和网络模块具有通用性,在构建各个处理单元时只需要选用其相应的接口功能进行连接即可,大大加快了仿真控制系统模型的建立速度.(2)可以比较方便模拟各种实时调度策略,通过示波器,可以很方便地观察各个任务的调度情况和对象的输出情况.(3)在网络模块中,可以很方便地模拟数据传输率、包的大小和丢包率等参数,有利于分析各类参数对NCS的性能影响.图4为TrueTi m e工具箱的模块界面. TrueTi m e工具箱主要由实时内核模块(TrueTi m e Ke mel)、有线网络模块(TrueTi m e Net w ork)、无线网络模块(TrueTi m e W ireless Net w ork)和电池模块(TrueTi m e Battery)等4个模块组成.TrueTi m e 中的模块与Si m ulink中的模块相连,就可以构建相应的NCS.图4 TrueTi m e工具箱模块界面(1)实时内核模块 或称计算机模块,可作为网络控制系统的各网络节点使用,具有灵活的实时内核、A/D和D/A转换器接口、网络发送和接收接口、外部中断通道以及多任务调度和监控输出接口,调度器与监控器的输出用于显示仿真过程中公共资源(CP U,以及监控器、网络)的分配情况.内核模块可以按照用户定义的任务执行,它支持固定优先级(p ri oFP)、单调速率(p ri oR M)、截止时间单调(p ri oDM)和最早截止时间优先(p ri oE DF)等4种任务调度算法.任务执行取决于内部事件与外部事件,且以中断方式产生.外部事件与计算机模块的外部中断通道相连,相应的信号改变值时(如信息到达网络)中断被触发.内部事件与定时器相关,当定时器时间到或者任务完成时触发.当外部和内部中断发生时,用户定义的中断句柄被调用去执行中断服务程序.中断句柄工作相似于一个任务,一个中断句柄被定义为标示符、优先级和代码函数,任务的执行与中断句柄都是由用户编写的Matlab或C++语言代码函数实现.52 程启明,等:基于TrueTi m e工具箱的网络控制系统及其在电机控制上的应用(2)有线网络模块 包括网络输入输出接口、网络调度和监控接口等.当有信息读入或发送时,该模块就采用事件驱动方式执行工作.在仿真环境下,当一条信息的传输完成时,该信息将被存储在目的计算机节点的缓冲区,并以中断的形式通知目的计算机.读入/发送的信息应包含发送和接受节点的信息、用户数据(通常是控制信号或测量信号)、信息总长度、实时特性参数(如优先权、截止时间)等.该模块还可定义节点数、网络速度、媒介访问控制协议和网络时延等参数,按照选定的网络模块模拟数据的接受与发送,支持CS MA /CD (如Ethernet ),CS MA /AMP (如CAN ),Round Robin (如T oken Bus ),F DMA,T DMA (如TTP ),S witched Ethernet 等6种简单的网络协议模型.(3)无线网络模块 其结构与有线网络模块类似,也以事件驱动方式工作.目前主要支持I EEE 802.11b /g (W LAN )和I EEE 802.15.4(Zig Bee )两种无线网络协议.(4)TrueTi m e Battery 电池模块 主要用来为内核模块提供电源功率.它只是一个参数,即初始功率.使用TrueTi m e 仿真时,首先要对NCS 中的网络模块和各个节点即计算机模块进行初始化.初始化涉及输入和输出端口的数目、选择优先级函数、定义代码函数、建立线程与中断句柄等.在初始化时,用户要设置各种参数,编写各种Matlab 语言或C ++代码函数实现所需功能,编写代码可通过调用伪码完成,在计算机内核中提供了一组能够被用户调用的实时伪码.当然,TrueTi m e 仿真软件包也存在一些不足之处.例如,系统功能的实现是在仿真前通过代码完成的,因此,改变系统参数不够直接,操作不够方便;系统仿真中缺少对高层网络协议(如TCP )的仿真,需要对当前的库进行扩展;还要进一步研制硬件模块(如处理器与智能传感器),使得系统功能直接以硬件方式实现.3 在直流电机控制上的应用仿真直流电机是很常见的一种驱动设备,它广泛应用于机器人、数控机床、自动生产线、电动车辆、无人驾驶飞行器等工业控制领域.直流电机的响应速度很快,时间常数较小,对控制回路中的时延比较敏感,可以很好地展示网络产生的时延对控制性能的影响.因此,可选择直流电机作为被控对象来研究NCS 的有关问题[11,12].假设某直流电机的模型传递函数为G (s )=1000s +s2(1)控制器采用数字P I D 控制算法为u (k )=P (k )+I (k )+D (k )P (k )=K[r (k )-y (k )]I (k )=I (k -1)+K TsT i [r (k -1)-y (k -1)]D (k )=a d D (k -1)+b d [y (k -1)-y (k )](2)式中:a d =T d(N T s +T d );b d =N KT d (N T s +T d );r ———给定参考信号;y ———输出信号;u ———控制信号;k ———采样时间点;K ———比例系数;T i ———积分时间;T d ———微分时间;N ———微分增益;T s ———采样周期.利用TrueTi m e 仿真工具箱中的各个模块,在MAT LAB /Si m ulink 仿真环境下,构建了直流电机网络控制系统仿真模型,如图5所示.图5 网络环境下直流电机控制系统 图5中,直流电动机(DC Servo )的控制是通过网络模块(Net w ork )来实现的,时间驱动的传感器节点(Node4)周期性地采集信号,并通过网络模块把信号传给控制器节点(Node3),控制器62上 海 电 力 学 院 学 报 2009年节点接收传感器信号,采用P I D 控制算法计算出控制信号并通过网络模块传给执行器节点(Node2),执行器节点接收控制信号并产生相应的动作,干扰结点(Node1)产生阻碍网络传输的随机干扰信号.设置干扰节点的目的是模拟网络中的负载,周期地发送和接收数据,占用网络带宽,参与控制的网络节点产生传输时延.传感器结点为时间驱动型,而控制器结点和执行器结点内的线程则为事件驱动型.采用根据优先权决定信息的传输顺序的CAN 网络协议(CS MA /AMP ),调度策略采用固定优先级(p ri oFP ),数据传输速率0.1Mbp s,规定干扰结点(I nterference )产生的信息具有最高优先级别,参考信号(Reference )采用零时刻触发的方波信号.仿真系统可以通过发送时延与接收时延进行传输时延的设定. 图6为网络无传输时延时的系统仿真曲线.仿真中的参数取值为:T s =0.001s ,N =100000,T d =0.035s ,T i =0.3s ,K =1.5,给定信号为周期=0.5s ,振幅=1.0的方波,时间延时=0s .图6 没有时延情况下的系统曲线从图6可知,输出信号开始虽有小幅超调,但总体上稳定性较好,输出信号基本上能跟踪给定的方波信号.假设传感器到控制器的接收延时、控制器计算时间时延、控制器到执行器的发送时延都为0.001s ,即整个回路的预计时延为0.003s .图7为网络加入0.003s 时间延时的系统仿真.仿真中的参数取值均不变,仅时间延时=0.003s .从图7可知,输出信号超调加剧,震荡加强,稳定性变差,性能降低.随着时延逐步增加,系统的稳定性也将逐步降低,最终变为不稳定的振荡信号.因此,当系统存在时延且时延变化时,必须改变P I D 控制的控制参数或改用S m ith 预估控制、内模控制、预测控制、自适应控制、鲁棒控制、智能控制、混合控制等某种更高级的控制方法,以适应网络时延变化需要.此外,还应考虑干扰信号和被控对象本身的变化对系统控制性能的影响.图7 加入0.003s 时间延时情况下的系统曲线4 结束语NCS 理论是目前国际控制理论界的研究前沿和热点之一,它综合了计算机网络、计算机通信和自动控制等多方面技术.但是NCS 将通信网络引入闭环控制系统中,也带来了时延等一系列新问题.TrueTi m e 软件工具箱为NCS 理论的仿真研究提供了简易可行、功能齐全的手段,它能够仿真多任务实时控制系统的时间特性,可以用来方便地研究网络调度协议对控制系统性能的影响,实现网络调度与系统控制的结合研究.参考文献:[1] 岳东,彭晨,HAN Q L.网络控制系统的分析与综合[M ].北京:科学出版社,2007:32245.[2] 张庆灵,张雪峰.网络控制系统研究综述与前景展望[J ].信息与控制,2007,36(3):3642370.[3] 黎善斌,王智,张卫东,等.网络控制系统的研究现状与展望[J ].信息与控制,2003,32(3):2392243.[4] 张国峰,王光义,宋强.网络化控制系统:建模、分析与控制[J ].信息与控制,2007,36(3):3712379.[5] 谢林柏,方华京,王华.网络化控制系统的信息调度与稳(下转第38页)72 程启明,等:基于TrueTi m e 工具箱的网络控制系统及其在电机控制上的应用层个数)原则,考虑到一定的裕量,选择隐含层神经元的个数为10个.神经网络输出层的输出为k p ,k i ,k d 的参数.因为输出参数k p ,k i ,k d 均为非负的数值,所以选取激活函数为g (x )=e x /(e x +e -x).选定各层加权系数的初始权值为(-0.5,0.5)的任意值.选定学习速率为0.25,惯性系数为0.5,此时置循环次数k =1.(2)采样得到r in (k )和y out (k ),计算该时刻误差error (k )=r in (k )-y out (k ).(3)计算神经网络各层神经元的输入和输出,NN 输出层的输出即为P I D 控制器的3个可调参数k p ,k i ,k d .(4)根据增量式数字P I D 的控制算法计算P I D 控制器的输出u (k )=u (k -1)+k p(error (k )-error (k -1)+k i error (k )+k derror (k )-2error (k -1)+error (k -2).(5)进行神经网络学习.取性能指标函数E (k )=1/2r in (k )-y out (k )2,按照梯度下降法在线调整加权系数,实现P I D 控制参数的自适应调整.(6)置k =k +1,返回到(1).4 结束语本文针对火电机组过热汽温串级系统,研究了单神经元自适应P I D 控制器和BP 神经网络P I D 控制器,并在MAT LAB 中进行了过热汽温控制的编程实现.单神经元结构简单,参数设置较为容易,也能够达到较好的控制效果.另外,神经元比例系数对控制性能有较大影响,学习速率对控制性能的影响不敏感,其仿真结果对控制器性能改善和参数的选择具有指导意义.BP 神经网络P I D 适应性强,但BP 网络受初始权值、网络结构以及神经网络参数影响较大,而且网络参数的设置基本上依靠经验,所以要想实现较好的控制效果,必须对网络进行调试.本文所提出的控制方法,若加入作为辨识器的NN I,在无法得知对象的精确模型时,整个控制系统将会有较好的鲁棒性.所以,辨识器NN I 的设计,是今后研究的内容.同时,神经网络BP 算法易陷入局部极小点,如何更好地解决这个问题,也是今后需要进一步深入研究的课题.参考文献:[1] 边立秀,周俊霞,赵劲松,等.热工控制系统[M ].北京:中国电力出版社,2001:1522193.[2] 金以慧.过程控制[M ].北京:清华大学出版社,1993:1255.[3] NARENDRA K S,P ARTHAS ARATHY K .I dentificati on andcontr ol of dyna m ic syste m s using neural net w orks [J ].I EEETrans .Neural Net w orks,1990,(1):4227.[4] 袁曾任.人工神经元网络及其应用[M ].北京:清华大学出版社,1999:1225.[5] 高伟.计算机控制系统:第四册[M ].北京:中国电力出版社,2000:2762282.[6] 马平,朱燕飞,牛征.基于神经网络的主汽温控制系统[J ].华北电力大学学报,2001,28(2):52255.(上接第27页) 定性研究[J ].控制与决策,2004,19(5):5892591.[6] ZHANG L Q,SH I Y,CHEN T W ,et al .A ne w method f orstabilizati on of net 2worked contr ol syste m s with random delays [J ].I EEE Transacti ons on Aut omatic Contr ol,2005,50(8):117721181.[7] MONTESTRUQUE L A,ANTS AK L I S P .Stability of model 2basednet w orkedcontr olsyste m swithti m e 2varyingtrans m issi on ti m es [J ].I EEE Transacti ons on Aut omaticContr ol,2004,49(9):156221572.[8] Z H I V OG LY ADOV P V,M I D DLET ON R H .Net w orked contr oldesign for linear syste m s [J ].Aut omatica,2003,39(4):7432750.[9] TI PS U W AN Y,CHO W M Y .Contr ol meth 2odol ogies in net 2worked contr ol syste m s [J ].Contr ol Engineering Practice,2003,11(10):109921111.[10] 刘峙飞,王树青.网络控制系统的仿真平台设计[J ].仪器仪表学报,2005,26(6):5972600.[11] 何坚强,张焕春,经亚枝.基于Matlab 环境的网络控制系统仿真平台[J ].计算机工程与应用,2005,2(1):1422145.[12] 刘景军,刘晓文,胡萍.实时多任务控制系统的TureTi m e建模与仿真[J ].系统工程与电子技术,2007,29(12):214022142.83上 海 电 力 学 院 学 报 2009年。
网络仿真——协议评估的第三种途径

网络仿真——协议评估的第三种途径
网络仿真是一种以计算机模型为基础的仿真技术,可以模拟计算机网络中的各种协议和设备,以评估网络的性能和效果。
网络仿真的一个重要应用就是协议评估,为网络协议的设计者提供了一种快速、低成本的实验平台,以验证协议的正确性和可行性。
目前,协议评估主要有三种途径:实验室测试、模拟器测试和网络仿真。
网络仿真是协议评估的第三种途径,它可以以较低的成本和高度可控的环境下进行协议评估。
这种方法需要用到网络仿真软件,比如NS-2、OPNET等。
网络仿真软件可以构建出网络的拓扑结构,并且可以根据需求添加各种协议和服务,然后通过模拟网络通信,观察协议在这个网络环境下的性能和效果。
网络仿真有以下的优点:
一、模拟真实网络环境:网络仿真可以根据实际网络环境来模拟网络的特点,比如带宽、延迟、拓扑结构等,从而更准确地判断协议的性能和效果。
二、低成本高效率:网络仿真不需要实际的硬件设备,只需要在计算机上运行网络仿真软件,成本低、效率高;可以快速验证协议的正确性和可行性,省去在实际网络环境中进行试验的时间和成本。
三、高度可控:网络仿真软件可以根据用户需要添加不同的协议和服务,模拟各种测试情况,如数据包丢失、网络拥塞等,
使测试更加真实和可控。
网络仿真在协议评估中的应用非常广泛,可以用于协议设计、性能评估、安全评估等方面。
通过网络仿真可以更好地理解和掌握网络协议的工作原理和性能特点,发现和解决协议设计中的问题,提高协议的可信度和实用性。
总之,网络仿真作为协议评估的第三种途径,具有成本低、效率高、高度可控等优点,是一种非常实用的方法,可以有效地评估和提高网络协议的性能和效果。
truetime仿真
基于Truetime的网络调度策略仿真【实验目的】通过matlab和truetime插件对网络控制系统进行仿真,对比EDF和RM调度算法。
该系统中包括PID控制器、被控对象、传感器、执行器,其中控制器与执行器,传感器与控制器的通讯通过以太网。
【实验步骤】仿真过程首先需要配置matlab中的truetime环境,然后配合simulink相关组件完成系统框图的连接,然后编写truetime模块中的初始化文件,最后进行仿真。
1、truetime组件配置addpath([getenv(’TTKERNEL’)])addpa th([getenv(’TTKERNEL’) ’/matlab/help’])addpath([getenv(’TTKERNEL’) ’/matlab’])按照官方手册中给出的配置步骤,安装truetime 2.0B7。
2、编辑网络控制系统仿真模型网络控制系统包括,执行器,传感器,控制器,被控对象,网络,以及一些其他的辅助功能模块,如参考信号,示波器等。
3、执行器actuator配置执行器的输入信号由控制器通过网络给定,输出直接控制被控对象,因此无输入管脚,有一个输出管脚,连接到网络1,节点2。
初始化文件编写,参照示例中的控制器,改写初始化文件。
function actuator_init% Distributed control system: sensor node%% Samples the plant periodically and sends the samples to the% controller node. Actuates controls sent from controller.% Initialize TrueTime kernelttInitKernel('prioDM'); % deadline-monotonic scheduling% Sporadic actuator taskdeadline = 10.0;ttCreateTask('actuator_task', deadline, 'actuator_code');% Network handlerprio = 1.0;data = 'actuator_task';ttCreateHandler('network_handler', prio, 'nwhandler_code', data);ttAttachNetworkHandler('network_handler')4、传感器sensor配置传感器输入信号由被控对象给定,然后将信号通过以太网反馈给控制器。
网络系统仿真设计的模型构建与验证

网络系统仿真设计的模型构建与验证一、引言网络系统仿真是指使用计算机程序模拟网络系统的行为和性能。
它是一种有效的工具,可以帮助研究人员和工程师在实际系统投入使用之前评估和改进系统的设计。
在进行网络系统仿真时,模型的构建和验证是非常重要的步骤。
本文将重点讨论网络系统仿真模型的构建与验证。
二、网络系统仿真模型的构建1. 确定仿真目标:在构建网络系统仿真模型之前,需要明确仿真的目标,例如评估系统的性能、研究系统的稳定性等。
这有助于选择合适的建模方法和技术。
2. 收集系统数据:为了构建可靠的仿真模型,需要收集系统的相关数据,例如网络拓扑结构、数据流量、网络设备特性等。
这些数据将用于确定系统的输入和输出。
3. 选择建模方法:根据仿真目标和数据的特点,选择合适的建模方法。
常用的建模方法包括离散事件仿真(Discrete Event Simulation, DES)、连续仿真(Continuous Simulation)和混合仿真(Hybrid Simulation)等。
4. 设计模型结构:根据所选择的建模方法,设计网络系统仿真模型的结构。
模型结构应能够准确地反映真实系统的特性,并且具有可扩展性和灵活性。
5. 简化模型:在构建网络系统仿真模型时,往往需要对模型进行简化。
简化模型可以减少计算复杂性,提高仿真的效率。
然而,简化模型也会带来一定的误差,因此需要在精度和计算效率之间进行权衡。
三、网络系统仿真模型的验证1. 确定验证指标:为了验证网络系统仿真模型的准确性,需要确定一些验证指标,例如网络时延、吞吐量、丢包率等。
这些指标应与实际系统的性能指标相对应。
2. 收集实际数据:为了验证仿真模型的准确性,需要收集实际系统的性能数据。
可以通过监测网络流量、记录设备运行状态等方式获取实际数据。
3. 对比实际数据与仿真结果:将实际数据与仿真结果进行对比分析,评估仿真模型的准确性。
如果仿真结果与实际数据相符,说明仿真模型是可靠的;如果存在较大误差,需要进一步改进模型。
基于Truetime工具箱的网络控制系统的仿真研究

基于Truetime工具箱的网络控制系统的仿真研究作者:崔庆权来源:《价值工程》2015年第10期摘要:网络控制系统(NCS)是目前网络和通信领域的研究热点,由于网络的引入,网络控制系统的仿真研究存在一定的难度。
本文首先给出了NCS的定义,介绍了网络控制系统的研究现状,以及现有的网络控制系统的仿真软件,并重点介绍了Truetime工具箱。
应用MATLAB和Truetime工具箱为基础,以一个三回路的网络控制系统为实例建立了Truetime仿真模型,通过仿真数据分析,验证了基于Truetime工具箱的网络控制系统模型的有效性。
网络控制系统的推行,能够有效地减少人工错误,为用户节省大量时间。
Abstract: Networked Control System(NCS) is the research focus in control field. Because of the introduced of Network, it's difficult to research NCS simulation. Firstly, the definition of NCS is given in the paper, and the research of NCS and the simulation tools of NCS are also proposed,especially the Truetime toolbox. Then, the simulation model of a NCS with three-loops is designed by Matlab and Truetime toolbox. According to the analysis of simulation results, the validity of the simulation method is proved.关键词:网络控制系统;Truetime工具箱;仿真;性能Key words: Networked Control System;Truetime toolbox;simulation;performance0; 引言网络控制系统[1,2](NCS)是指通过实时网络形成闭环的反馈控制系统。
TrueTime的一些认识

Introduction——数据链路层
主机 H1 电话网 H1 应用层 运输层 网络层 链路层 物理层 R1 网络层 链路层 物理层 R2 网络层 链路层 物理层 R3 网络层 链路层 物理层 路由器 R1 局域网 路由器 R2 广域网 路由器 R3 局域网 H2 应用层 运输层 网络层 链路层 物理层 主机 H2
Modelica Library—Example
通过网络的模拟PID闭环控制
Implementation
原Simulink中的TrueTime模块是通过变步长求解器求
解C++写的S函数实现的
每个模块包含一个网络结构指针和一个离散事件仿真
器
零交叉功能是用来强制求解器在每个内部(暂定)或
物理传输介质 通信子网
Introduction——数据链路层
这个Modelica库重点在于解决各种有线和无线数据链
路层协议的MAC介质访问机制 两个 物理上连接的 设备:主机-路由器, 路由器-路由器, 主机-主机 数据单元: frame(帧)
帧开始 开始 发送 帧首部 IP 数据报 帧的数据部分 MTU 数据链路层的帧长 帧结束 帧尾部
但过于粗略的(设定同一延
时)有会导致仿真失败
Introduction——Modelica network protocol library
The Department of Automatic Control, Lund
University ITEA2 project EUROSYSLIB 旨在应用于实时网络中( real-time networking ) 这个库是基于Matlab/Simulink工具箱TrueTime而 来的, TrueTime也是有上述团队开发的
TrueTime安装详细说明
TrueTime安装说明:详细注明各个细节TrueTime是瑞典隆德大学(Lund University)自动控制系的Martin Ohlin,Dan Henriksson和Anton Cervin开发的一个基于MATLAB\Simulink的网络化控制仿真工具箱,该工具箱填补了MATLAB\Simulink在新兴的网络化控制领域的仿真方面存在的空白。
截至目前(2007年8月),TrueTime的最近版本是1.5,下面的说明旨在介绍TrueTime 1.5的安装步骤,并对安装之前以及安装过程中的诸多调试过程中可能存在的问题给出解决的办法。
首先,需要申明。
TrueTime是使用C++语言编写的,因而它的运行依赖于C++编译器。
所以目标电脑上除了必须的MATLAB外还应安装C++编译器。
这里,TrueTime的作者推荐用户使用Microsoft公司的Visual Studio C++的编译器。
一般来说,计算机相关专业都需要Visual Studio这个涵盖Basic、C++、C#和J#等编程语言的可视化集成开发环境。
需要特别注意:TrueTime 1.5要求使用Visual Studio C++ 7.0,而广为使用的Visual Studio C++ 6.0是不可以的(因为它无法编译部分TrueTime的源文件)。
那么我们就应该事先安装Visual Studio .NET 2002(对应7.0版本)或Visual Studio .NET 2003(对应7.1版本)。
另外,TrueTime 1.5要求的MATLAB最低版本为6.5.1(即R13 SP1) 。
常用的6.1或5.3版本TrueTime 1.5不再支持。
1、如何得到TrueTime 1.5登陆隆德大学自动控制系站点http://www.control.lth.se/truetime。
下载需要先注册,然后他们会发邮件到你所注册的邮箱,邮件中包含下载TrueTime 1.5的链接。
基于TrueTime的无线网络控制系统仿真设计
基于TrueTime的无线网络控制系统仿真设计作者:彭丽萍岳东来源:《现代电子技术》2008年第24期摘要:无线网络控制系统(Wireless Networked Control System,WiNCS)是基于无线网络的分布式控制系统,融合了控制技术、计算机技术、网络技术与通信技术,具有无需布线、节省构建费用、组网和维护方便、易于扩展以及良好的可移动性等优点。
目前,无线网络控制系统的分析和设计已经成为控制界的热点研究之一。
针对无线网络控制系统的仿真技术进行了研究,基于网络控制仿真软件TrueTime以及Matlab/Simulink环境,设计了一个WiNCS仿真系统模型,提出了在无线网络控制系统中Fuzzy-PD控制算法的设计,并对PD控制、模糊控制和Fuzzy-PD控制三种控制器的控制性能进行了比较。
关键词:无线网络控制系统;Fuzzy-PD控制;TrueTime;Matlab仿真中图分类号:TN915文献标识码:B文章编号:1004-373X(2008)24-116-04Simulation of Wireless Networked Control System Based on TrueTimePENG Liping1,YUE Dong2(1.Jinken Vocational and Technical College,Nanjing,211156,China;2.Nanjing Normal University,Nanjing,210042,China)Abstract:Wireless Networked Control System (WiNCS) is a distributed control system based on the wireless network.It is a combination of control,computer,network and communication technology.The WiNCS has many advantages such as no wire,low cost,easy to maintain and expand,higher flexibility,and so on.The analysis and design of WiNCS has become a hotspot in the control field.The simulation techn of WiNCS is studied.A simulation model of WiNCS is designed on the basis of TrueTime and Matlab/Simulink.A design method of Fuzzy-PD control strategy based on WiNCS is proposed.The performance of PD,FLC and Fuzzy-PD control is compared.Keywords:wireless network control system;Fuzzy-PD control;TrueTime;Matlab simulation1 引言根据网络传输媒介的不同,NCS可以分为有线网络控制系统(Wire Networked Control Systems,WNCS)、无线网络控制系统(Wireless Networked Control Systems,WiNCS)和混合网络控制系统(Hybrid Networked Control Systems,HNCS)。
基于TrueTime的智能家居系统WSN仿真分析
0 引言
随着 生活水 平 的提高 ,人们 对智 能家 居 系统 的
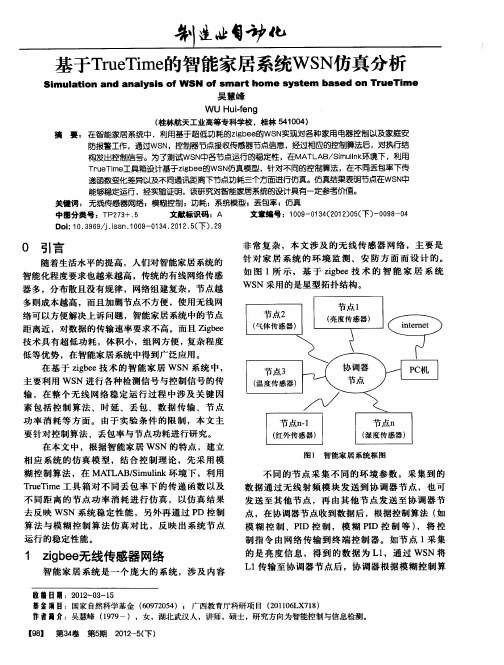
非 常 复 杂 ,本 文 涉 及 的无 线 传 感 器 网络 ,主 要 是 针 对 家 居 系统 的 环 境 监 测 、 安 防 方 面 而 设 计 的 。
T u i e t r r eT m t y Be e
WS 仿真 系统 中包括三个节 点和一个无线 网络 N
图2 re i T uTme部分模块框图
模块 ,三个 节 点分 别为传 感器 节点 ,控制 节点 ,干 扰节 点 。其 中传 感器 节点 为时 间驱动 ,周期 性采 集 信号 , WS 发送 给控制 器 , 由 N 控制节 点为事 件驱动
3o 0 o O0
3 0 3 O -8 4
3 构建基于Tu T 的WS 仿真模型 re i me N
31 系统建 立仿 真 模型 .
在 本 系 统 中 ,利 用 传 感 器 节 点 周 期 性 的 采 集
空旷场 合 ,各节 点 的最大 距 离可 以达到 6 米 , o
在 家 居环 境 中各房 间之 间 的墙壁 阻 断 等各 种 因素 , 设 置 节 点 间最 大 的 距 离 为 4 5米 ,超 过 4 5米 ,节 点 将 自动寻 找新 的 网络 。
多 则成本 越高 ,而且 加 删节 点不方 便 ,使用无 线 网
络 可 以方便解 决上 诉 问题 ,智能家 居 系统 中的节 点
距 离近 ,对数 据 的传输 速率 要求 不高 。而且 Zg e ib e 技 术具 有 超低 功 耗 ,体 积小 ,组 网方 便 ,复 杂程 度 低 等优 势 ,在智 能家居 系统 中得到 广泛 应用 。 在 基 于 z b e 术 的智 能 家 居 WS 系统 中 , i e技 g N 主要 利 用 W S 进行 各 种检 测信 号 与控 制信 号 的传 N 输 ,在 整 个无 线 网络 稳 定运 行 过 程 中涉 及 关 键 因 素 包 括 控 制 算 法 、时 延 、丢 包 、数 据 传输 、节 点 功 率 消 耗 等方 面 。 由于 实 验 条 件 的 限 制 ,本 文 主
Truetime网络仿真(可修改)
网络控制系统的调度研究与仿真(Truetime工具)1.节点的驱动方式网络控制系统中的传感器一般采用时钟驱动,传感器的时钟即为系统的时钟,而控制器和执行器既可以是时钟驱动,也可以是事件驱动。
但事件驱动相比于时钟驱动具有以下优点:(1)控制器或执行器为事件驱动方式时,从源节点(传感器或控制器)发送的数据一旦到达目标节点(控制器或执行器)便马上执行,而在时钟驱动方式时控制器或执行器的数据被执行要等到规定的时间点,因此事件驱动方式客观上减少了网络诱导时延;(2)控制器或执行器为事件驱动方式时,避免了控制器或执行器为时钟驱动方式时与传感器时钟同步的困难;(3)控制器或执行器采用事件驱动方式时,避免了控制器或执行器为时钟驱动方式时容易出现的空采样和数据丢失,提高了反馈数据的利用率。
事件驱动相对于时钟驱动也有一定缺点:(1)在实际运用中事件驱动较难实现。
(2)部分实际的网络控制系统不支持事件驱动方式。
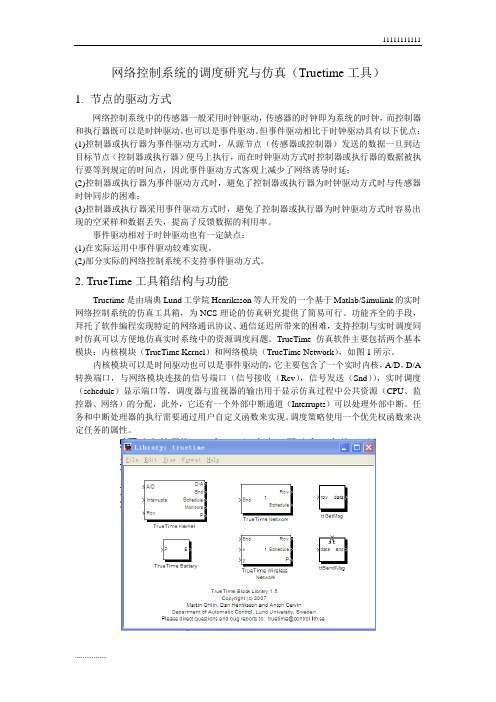
2. TrueTime工具箱结构与功能Truetime是由瑞典Lund工学院Henriksson等人开发的一个基于Matlab/Simulink的实时网络控制系统的仿真工具箱,为NCS理论的仿真研究提供了简易可行、功能齐全的手段,拜托了软件编程实现特定的网络通讯协议、通信延迟所带来的困难,支持控制与实时调度同时仿真可以方便地仿真实时系统中的资源调度问题。
TrueTime仿真软件主要包括两个基本模块:内核模块(TrueTime Kernel)和网络模块(TrueTime Network),如图1所示。
内核模块可以是时间驱动也可以是事件驱动的,它主要包含了一个实时内核,A/D,D/A 转换端口,与网络模块连接的信号端口(信号接收(Rcv),信号发送(Snd)),实时调度(schedule)显示端口等,调度器与监视器的输出用于显示仿真过程中公共资源(CPU、监控器、网络)的分配,此外,它还有一个外部中断通道(Interrupts)可以处理外部中断。
网络系统仿真设计方法与工具分析
网络系统仿真设计方法与工具分析随着信息技术和互联网的快速发展,网络系统的设计和仿真成为了重要的领域。
网络系统仿真具有很多优点,例如可以提前检测出潜在问题、减少开发成本、加快系统部署等。
本文将分析网络系统仿真设计方法与工具,讨论其应用和优势。
网络系统仿真设计方法1. 离散事件仿真(DES):离散事件仿真是一种常用的网络系统仿真方法,其以事件为触发,模拟网络系统中的实时行为。
通过记录和处理事件触发的序列,可以获得系统性能指标、资源利用率等信息。
2. 连续仿真:连续仿真是模拟网络系统中连续变化的过程,例如网络流量、信号传输等。
连续仿真可以模拟实际系统中的连续运行过程,提供更加准确的结果。
3. 混合仿真:混合仿真是将离散事件仿真与连续仿真相结合的方法。
通过将网络系统划分为离散事件和连续变化两个部分,可以更好地模拟实际系统的行为。
网络系统仿真设计工具1. OPNET:OPNET是一种常用的网络系统仿真工具,可以用于网络性能分析、协议设计、网络规划等。
OPNET提供了强大的图形界面和仿真引擎,可以方便地构建和部署复杂的网络系统。
2. NS-3:NS-3是一个开源的网络仿真器,具有强大的建模和仿真功能。
NS-3支持C++和Python等编程语言,用户可以自定义网络协议和拓扑结构,进行系统性能评估和研究。
3. MATLAB/Simulink:MATLAB/Simulink是一种流行的工具,广泛应用于系统建模和仿真领域。
其强大的数学和建模工具可以用于网络系统性能分析、优化和设计。
网络系统仿真设计工具的优势1. 提高系统效率:通过仿真设计工具,可以对网络系统的性能进行评估和优化,提高系统的效率和稳定性。
2. 减少开发成本:通过仿真工具可以在系统实际实施前检测问题,减少开发过程中的试错成本。
3. 加速系统部署:仿真工具可以模拟实际环境下的系统运行情况,提前发现可能的问题,从而加速系统的部署和推广。
4. 提供决策支持:仿真工具可以帮助决策者评估不同方案的可行性和效果,在制定决策时提供科学的依据。
MathWorks Simulink Real-Time提供完整实时仿真和测试

设计 软件 , 这是 一 款针 对 1 4 n m F P GA 的设 计 软件 。客户
现 在 可 以 启 动 自己 的 S t r a t i x 1 0 F P GA 设 计 , 采用 S t r a t i x
提 供 完 整 实 时仿 真 和 测 试
Ma t h Wo r k s宣 布 将 把 S i mu l i n k Re a l— Ti me用 于
S i mu l i n k产 品 系 列 。S i mu l i n k Re a l —Ti me在 公 司 的 Re —
l e a s e 2 0 1 4 a ( R 2 0 1 4 a ) 中提 供 , 可 让 工 程 师 在 连 接 到 其 物 理 系统 的特 定 目标 计 算 机 硬 件 上 , 通过 S i mu l i n k模 型 建
入 了 Hy p e r —Awa r e设 计 流 程 , 包 括 创 新 的 快 速 前 向 编译 功能 , 支 持 客户 快 速 研 究 设 计 性 能 , 实 现 性 能突 破 。 随着 S t r a t i x 1 0 F P GA 在 内 核 性 能 上 的 大 幅 度 突 破 ,
用 户 快 速 进行 改 进 。用 户 可 以 采 用 快 速 前 向 编 译 功 能 所
是S p a n s i o n的 D C—D C降压 转 换 器可 编 程 电源 管 理 集 成 电 路 MB 3 9 C 0 3 1家 族 的 扩展 产 品 , 该 系 列 可 在 单 芯 片 上 为 顶 尖 的片 上 系 统 ( S o C ) 产品、 存 储 和 外设 产 品 提 供 三 通 道 电 源, 这 些 设备 在 具 备 先 进 图 像 语 音 处 理 功 能 的 办 公 自动化
网络行为仿真发展历程

网络行为仿真发展历程
网络行为仿真是指利用计算机技术和相关理论模拟和重现人类在网络环境下的行为。
网络行为仿真的发展经历了以下几个阶段。
第一阶段:初创期
网络行为仿真最初起源于计算机科学领域,主要用于网络安全方面的研究。
在这个阶段,研究人员主要关注网络中恶意软件的行为模式和传播方式,以及网络攻击的演化规律。
常见的仿真技术包括基于规则的仿真、离散事件仿真等。
第二阶段:应用拓展期
随着互联网的普及和发展,网络行为仿真逐渐应用到更多的领域。
不仅仅局限于网络安全领域,还延伸到社交网络分析、虚拟现实、交通仿真等领域。
在这个阶段,研究人员开始关注网络中个体行为与整体系统效应之间的关系,通过仿真实验揭示人类行为在网络环境中的特点和规律。
第三阶段:智能化发展期
随着人工智能和机器学习等技术的飞速发展,网络行为仿真逐渐向智能化方向发展。
研究人员开始尝试利用智能算法和深度学习模型,对网络中的行为进行模拟和预测。
智能化的网络行为仿真不仅可以更好地理解和分析网络中复杂的行为模式,还可以用于辅助网络管理和决策。
第四阶段:跨学科融合期
近年来,网络行为仿真逐渐与其他学科进行融合,如社会学、
心理学、经济学等。
通过跨学科的合作,研究人员不仅可以更全面地理解网络行为的动因和机制,还可以提出更有效的网络治理和管理策略。
这个阶段的网络行为仿真更加注重综合分析和模拟,尝试构建更精确的网络行为模型。
总的来说,网络行为仿真经过初创期、应用拓展期、智能化发展期和跨学科融合期等阶段的演化,不断地从理论到实践取得了丰硕的成果,为我们更好地理解和应对网络环境中的行为提供了重要的参考和支持。
网络控制系统的TrueTime分析与仿真

的 网络 控 制 仿 真 工 具 箱 Tre me 网络 控 制 系统 的仿 真研 究 提 供 了简 易可 行 、 能 齐 全 的 工 具. re i e可 以 uTi 为 功 T uT m
对网络 时延、 网络参数、 控制方法、 网络调度等 多方面进 行综合仿真研 究, 实现控 制性能与 网络 调度 同时仿真 的要 求, 使得 网络控制 系统的仿真研 究更为容 易. 本文介绍 了 Tre me工具箱 的组成与 功能, uTi 结合 直流 电机 网络控制
时间 、 队列 中的任务完 成和定 时时 间到等 ) 和外 部事
的用户实现资源共享和协调操作, 是一种集通信网 络 和控制 系统于一 体 的全分 布式 、 网络化 、 时反馈 实 控制 系统 [ 由于 网络 的 引入 , 1 剖. 导致 数 据 信 号 网络
诱 导延迟 , 种延迟 是时不 变的或时 变的 , 这 使得 控制 系统 的分析与设 计 变得 复 杂. 网络 控制 系 统 的设 计 除 了要 考虑通 常的 控 制算 法设 计 , 还要 考 虑 网络 资
1 Tre i 工 具 箱 的 组成 与 功 能 uTme
Tre i 工 具 箱 是基 于 Mal / I u T me t b SMUI NK a I
任 务调度 接 口和监 控接 口. D接 口连 接外 部模 拟 A/ 信号, 将信 号转换 为计 算 机 模 块 内部 使用 的数字 信
仿 真系统 的 , 为 Malb SMUINK 扩展 了基 于 它 t /I a I
号 ;/ D A接 口将内部的数字信号转换为模拟信号并 输出; 网络 发送接 口将模块 内部 数据输 出到 网络 ; 网
网络仿真和多任务调度功能. 它由 6 个模块构成, 即
TrueTime安装备忘
TrueTime安装说明:详细注明各个细节TrueTime是瑞典隆德大学(Lund University)自动控制系的Martin Ohlin,Dan Henriksson和Anton Cervin开发的一个基于MATLAB\Simulink的网络化控制仿真工具箱,该工具箱填补了MATLAB\Simulink在新兴的网络化控制领域的仿真方面存在的空白。
截至目前(2007年8月),TrueTime的最近版本是1.5,下面的说明旨在介绍TrueTime 1.5的安装步骤,并对安装之前以及安装过程中的诸多调试过程中可能存在的问题给出解决的办法。
首先,需要申明。
TrueTime是使用C++语言编写的,因而它的运行依赖于C++编译器。
所以目标电脑上除了必须的MATLAB外还应安装C++编译器。
这里,TrueTime的作者推荐用户使用Microsoft公司的Visual Studio C++的编译器。
一般来说,计算机相关专业都需要Visual Studio这个涵盖Basic、C++、C#和J#等编程语言的可视化集成开发环境。
需要特别注意:TrueTime 1.5要求使用Visual Studio C++ 7.0,而广为使用的Visual Studio C++ 6.0是不可以的(因为它无法编译部分TrueTime的源文件)。
那么我们就应该事先安装Visual Studio .NET 2002(对应7.0版本)或Visual Studio .NET 2003(对应7.1版本)。
另外,TrueTime 1.5要求的MATLAB最低版本为6.5.1(即R13 SP1) 。
常用的6.1或5.3版本TrueTime 1.5不再支持。
1、如何得到TrueTime 1.5登陆隆德大学自动控制系站点http://www.control.lth.se/truetime。
下载需要先注册,然后他们会发邮件到你所注册的邮箱,邮件中包含下载TrueTime 1.5的链接。
TrueTime在实时控制系统仿真中的应用
2. 27 ×10 - 3 kg ·m2 。2 个对象的采样时间和调度
策略可以在控制计算机的初始文件中用 tt Create2
Perio dic Task 和 t t Init Kernel 函数设定。
2. 3 仿真实验及结果
首先 ,根据 2 个倒立摆的近似线性模型 ,利用
L Q R 方法 ,在 Q = diag ( [ 0. 25 0 4 0\ 〗) , R = 0. 003
z = Az + Bv
(1)
z = [ x x φ φ] T
式中 x 小车位移
x 小车速度
φHale Waihona Puke 摆杆偏角φ 摆杆角速度v 控制输入
0
0 A=
0
1 - b( J + mL2 )
K 0
0
0
- m2 L 2 g
0
K
1
0
0
mL b K
《机械与电子》2005 (3)
mL g ( M + m) K
0
a. 静态调度策略是一类优先级固定的调度策 略 。应用这类调度策略时 ,各控制任务的优先级在 控制器设计时就已确定 ,并且不随控制任务的执行 时间变化 , 如固 定优 先 级 调 度 FP 和 单 速 率 调 度 RM 。
b. 动态调度策略是一类优先级动态变化的调度 策略 。应用这类调度策略时 ,各控制任务的优先级 随各控制任务的执行时间或截止时间动态变化 ,如 最早时限优先调度 ED F 和单时限调度 DM 。 2. 2 控制系统结构
4 结束语
面绘制算法适用于原始数据是离散的三维空间 数据场 ,断层图像三维重构的应用实例中的算法就 是类似于 MC 的构造等值面算法 。此方法构造出 的图像虽不能反映整个原始数据的细节 ,但可以对 等值面产生清晰的图像 ,并且可利用现有的图形硬 件实现较快的绘制 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
网络控制系统的调度研究与仿真(Truetime工具)1.节点的驱动方式网络控制系统中的传感器一般采用时钟驱动,传感器的时钟即为系统的时钟,而控制器和执行器既可以是时钟驱动,也可以是事件驱动。
但事件驱动相比于时钟驱动具有以下优点:(1)控制器或执行器为事件驱动方式时,从源节点(传感器或控制器)发送的数据一旦到达目标节点(控制器或执行器)便马上执行,而在时钟驱动方式时控制器或执行器的数据被执行要等到规定的时间点,因此事件驱动方式客观上减少了网络诱导时延;(2)控制器或执行器为事件驱动方式时,避免了控制器或执行器为时钟驱动方式时与传感器时钟同步的困难;(3)控制器或执行器采用事件驱动方式时,避免了控制器或执行器为时钟驱动方式时容易出现的空采样和数据丢失,提高了反馈数据的利用率。
事件驱动相对于时钟驱动也有一定缺点:(1)在实际运用中事件驱动较难实现。
(2)部分实际的网络控制系统不支持事件驱动方式。
2. TrueTime工具箱结构与功能Truetime是由瑞典Lund工学院Henriksson等人开发的一个基于Matlab/Simulink的实时网络控制系统的仿真工具箱,为NCS理论的仿真研究提供了简易可行、功能齐全的手段,拜托了软件编程实现特定的网络通讯协议、通信延迟所带来的困难,支持控制与实时调度同时仿真可以方便地仿真实时系统中的资源调度问题。
TrueTime仿真软件主要包括两个基本模块:内核模块(TrueTime Kernel)和网络模块(TrueTime Network),如图1所示。
内核模块可以是时间驱动也可以是事件驱动的,它主要包含了一个实时内核,A/D,D/A 转换端口,与网络模块连接的信号端口(信号接收(Rcv),信号发送(Snd)),实时调度(schedule)显示端口等,调度器与监视器的输出用于显示仿真过程中公共资源(CPU、监控器、网络)的分配,此外,它还有一个外部中断通道(Interrupts)可以处理外部中断。
任务和中断处理器的执行需要通过用户自定义函数来实现。
调度策略使用一个优先权函数来决定任务的属性。
图1 Truetime工具箱网络模块是事件驱动的,当有消息进入或离开网络时它便执行。
一条消息包含的信息有发送和接收节点号,用户数据(如测量信号和控制信号),消息的长度和其他可选的实时属性(如优先级或最终时限等)。
网络模块包含两个信号端口(信号接收(Rcv),信号发送(Snd)),以及一个实时调度(schedule)显示端口。
其中收发信号端口可以通过Matlab模块扩充至多个接口,TrueTime中预定义了多种调度策略,包括固定优先级(Fixed Priority),单调速率(RM,Rate Monotonic),截止期单调(DM,Dead line Monotonic),最小截止期优先(EDF,Earliest Dead line First),同时,它还有多种介质访问控制协议(CSMA/CD,CSMA/CA,Round Robin,FDMA或TDMA)和相应的参数可以选择,如图2所示。
图2 Truetime网络模块Network number:网络模块的数量。
Number of nodes:连接在网络模块的节点数量。
Data rate (bits/s):网络传输速率。
Minimum frame size (bits):协议的最小结构长度。
Pre-processing delay (s):信息在网络接口上的发送时延。
Post-processing delay (s):信息在网络接口上的接收时延。
Loss probability (0–1):丢包率。
利用TrueTime仿真软件,网络控制系统中的各个处理单元(包括传感器、控制器和执行器)都可以由计算机模块构建,而网络控制系统的实时网络可以由所需协议的网络模块来构建,另外,再结合Matlab/Simulink的其他控制模块,就可以简便而又快速的构建一个实时的网络控制系统。
利用TrueTime仿真软件包的优点在于:(1)由于该仿真软件中两个基本模块具有通用性,在构建各个处理单元时只需选用其相应的接口功能进行连接即可,因此大大加快模型构建的速度。
(2)该仿真软件可以比较方便模拟各种实时调度策略,并通过Scope可以很方便地观察各个任务的调度情况和对象的输出情况。
(3)在网络模块中,可以很方便的模拟数据传输率、数据包的大小和丢包率等网络参数,有利于分析各类参数对网络控制系统的性能影响。
使用TrueTime进行仿真时,首先要对网络控制系统中的内核模块TrueTime Kernel和网络模块TrueTime Network以及各个节点进行初始化,在初始化中需要完成以下工作:1.初始化功能块内核,设置功能块输入、输出端口的数目和调度策略。
2.定义消息函数,并根据节点采用的驱动方式,设置不同的消息调度策略。
对于时钟驱动的节点,调用ttCreatPeriodicTask函数,设置周期性的任务调度策略,以实现定时采样功能。
对于事件驱动的节点,调用ttCreateInterruptHandler函数,设置中断式消息调度策略,使节点在接受到网络数据后触发相应的消息。
3.初始化网络端口,设置节点对应的网络端口代号。
控制网络功能由TrueTimeNetwork功能块实现。
网络类型、节点数、传输速率以及丢包率等参数可以通过TrueTime Network功能块的设置窗口进行设置。
具体的参数选项根据网络类型的不同而不同。
表2 TrueTime核心模块接口功能TrueTime Network模块提供了3个接口来进行数据的传递或者监控系统的运行,其功能如表3所示。
Rcv 发送数字信息至TrueTime Kernel模块的Rcv端口Schedule 查看仿真过程中系统资源的分配情况上述2个模块均为事件驱动,包括内部事件和外部事件。
内部事件通常是由时钟中断触发的,如时间队列释放一个任务或是计时终结都会引发时钟中断。
而外部事件主要是和网络模块的外部中断通道有关,当相应的通道的信号值改变就会触发中断。
除了计算机模块的A/D转换借口的输入信号是连续时间信号外,这两个模块所有端口的输入都是离散时间信号,输出也都是离散时间信号。
3. 仿真举例根据节点不同的工作方式,可以得到不同的系统离散时间模型。
为了对网络控制系统进行建模,首先对系统作如下假设:1.传感器节点采用时间驱动方式,对被控对象的输出进行等周期采样,采样周期为h;2.控制器节点和执行器节点都采用事件驱动方式,即信息的到达时间即为响应节点的动作时间。
控制系统将传感器、控制器和执行器作为系统的3个节点分别用一个TrueTime Kernel 模块仿真,传感器节点采用时间驱动方式,它包含了一个周期性任务,将定期采样的信号通过网络传送到控制器节点;控制器和执行器节点采用事件驱动方式,控制节点处理控制信号并将结果送至执行器节点,执行器节点执行控制信号并输出结果。
该网络控制系统的仿真模型如图3所示。
图3 网络控制系统仿真模型图4 参数设置界面图5 以太网下的系统输出图6 令牌网下的系统输出图7 设备网下的系统输出网络传输过程中的数据丢失是影响网络控制系统性能的另外一个重要的因素,通过设定不同的丢包率来研究其对系统性能的影响。
图8 参数设置界面无丢包:图9系统的输入和输出丢包率0.1:图10系统的输入和输出丢包率0.15:图11系统的输入和输出丢包率0.2:图12 系统的输入和输出丢包率越大,对系统性能的影响越大,当丢包率达到一定程度时,就会使系统不再稳定。
(1)在令牌网下,传输速率为1.5M:图13 系统响应曲线(无冲突、干扰和数据丢失)网络干扰节点占网络资源的20%情况下,调度策略为固定优先级(Fixed Priority),系统的输出和网络资源调度情况:图14 系统响应曲线(2)在令牌网下,传输速率为93.75Kbit/s,调度策略为固定优先级(Fixed Priority):图15 系统响应曲线图16 网络资源调度网络干扰节点占网络资源的20%情况下,系统的输出和网络资源调度情况,调度策略为固定优先级(Fixed Priority):图14 系统响应曲线图15 网络资源调度(3)在令牌网下,传输速率为93.75Kbit/s,网络干扰节点占网络资源的20%、丢包率为10%情况下,调度策略为固定优先级(Fixed Priority),系统的输出和网络资源调度情况:图16系统响应曲线图18 网络资源调度在令牌网下,传输速率为93.75Kbit/s,网络干扰节点占网络资源的20%、丢包率为10%情况下,系统的输出和网络资源调度情况,调度策略为PrioRM(单调速率):图19系统响应曲线图20 网络资源调度在令牌网下,传输速率为93.75Kbit/s,网络干扰节点占网络资源的20%、丢包率为10%情况下,系统的输出和网络资源调度情况,调度策略为PrioEDF:图20 系统响应曲线图21 网络资源调度在令牌网下,传输速率为93.75Kbit/s,网络干扰节点占网络资源的20%、丢包率为10%情况下,系统的输出和网络资源调度情况,调度策略为PrioDM:图20 系统响应曲线图21 网络资源调度在网络控制系统中,不同的网络传输协议,传输速率、干扰率、数据包的丢失率以及数据包的大小都会影响到网络控制性能,对于多任务的控制系统调度策略对控制性能也有很大的影响。
调度策略对控制系统性能的影响。
网络的调度问题:网络控制系统是基于网络的分布式控制系统。
网络控制系统中的所有控制信息都要通过实时网络传输,由于网络带宽的限制,网络中传送的信息不可避免产生碰撞、丢失和重发等现象,因此必须对网络中传输信息进行合理调度,否则控制信息产生的较大时延,会降低控制系统的控制性能,严重时将导致系统破坏,因此在网络控制系统的设计与研究中必须考虑网络的调度问题。
从仿真结果可见,网络控制系统不仅依赖于传统控制算法的设计,而且依赖于网络资源的调度与优化,由于调度的影响,使得控制系统传感器的采样周期产生变化,不是一个定值,同时从传感器检测到执行器之间时间也产生了变化,从而使得系统产生波动,导致性能降低。
不同的调度策略将决定网络与计算机的不同执行与传输方式以及不同的控制性能。
仿真表明,网络控制系统那个的性能不仅与常规的控制系统的控制方法有关,而且与网络的调度有关,所以必须对网络控制系统的控制方法与调度进行集成研究。
从图中可以看出,当无冲突任务、干扰节点和数据丢失时,信号的传输延时是常数,系统性能较好。
当加入冲突任务、干扰节点时,引起了信息在控制节点内和网络中对资源的争夺,竞争使某些低优先级的任务处于等待状态或闲置状态,这些任务不能得到及时处理,导致系统延时变大,而且在多任务竞争这个不确定特性下,时延是时变的,从而使系统指标恶化。