偏距里程程序
RTK测量操作步骤(共42张)

八、点放样
八、点放样----增加放样点
八、点放样----确定放样点位
九、直线放样---增加放样直线
九、直线放样---确定直线位置
十、线路放样----线路设置
根据线路设计所需 要的设计要素按照软件 菜单提示录入后,软件 按要求计算出线路点坐 标和图形。道路设计菜 单包括两种道路设计模 式: 元素模式和交点模 式
指示灯 GSM 五、参数设置---投影参数设置
属性赋值里程: 测量点时是否把里程作为属性。
灯
三、注意事项------基准站架设
基准站架设的好坏,将影响移动站工作的速度,并对移动站测量质量有着深远的影响,因此用户注意使观测站位置具有以下条件:
十、线路放样----元素模式
十、线路放样----线路设置
三、注意事项------基准站架设
三声关机, 四声动态, 显示,从而可以方便的进行线路的放样等测量工作。
三、注意事项------基准站架设
五声静态,
六声恢复初始设置。DL灯常
亮, STA灯五秒钟闪一次, 表示处在静态模式STA灯常亮, DL 用户如果在树木等对电磁传播影响较大的物体下设站,当接收机工作时,接收的卫星信号将产生畸变,影响RTK的差分质量,使得移动站很难
些基本元素逐一添加组合成线路,从而达到设计整段道路的目的
六、求转换参数---增加原始点坐标
范围设置: 用来设置放样的起始里程和终点里程,当前点不在此范围内时,不会计算偏距和里程,会提示不在线路范围内。
属性赋值里程: 测量点时是否把里程作为属性。
/ 电源灯 二、仪器的连接---基准站
开关键
范交围点设 模置式:是用目来静前设普置态遍放使/样G用的P的起R道始S路/里设程计和方终数式点。据里程链,当灯前点不在此卫范星围内蓝时,牙不会计算偏距和里程,会提示不在线路范围内。
卡西欧 5800 任意里程坐标正算程序

卡西欧5800 任意里程坐标正算程序主程序:QXJS注:带下划线的为零,不带的为“哦O”“K(ZH)”?D:“X(ZH)”?X:“Y(ZH)”?Y:“F”?W:“R”?R:“L1”?G:“L2”?H:“L”?L: “P=-1,1”?↙(注:↙是5800中的回车符也就是exe键)(28.64789G)÷R+(L-G-H) ÷(0.0174533R)+(28.64789H)÷R→O↙Gˆ(2)÷(24R)–G^(4)÷(2688R^(3)) →V↙H^(2)÷(24R)- H^(4)÷(2688R^(3))→J↙G÷2-G^(3)÷(240R^(2))+G^(5) ÷(34560R^(4))+(R+J-(R+V)cos(O))÷sin(O)→E↙H÷2-H^(3)÷(240R^(2))+H^(5)÷(34560R^(4))+(R+V-(R+J)cos(O))÷sin(O)→F↙LbI0: “KP=”? N↙If N≤D:Then N-D-E→A:W→I:0→B:0→K:Goto 1 IfEnd ↙If N≤D+G:Then N-D→S:RG→C:Prog“QJ”:P-E→A:MQ→B:W→I: K→K:Goto 1 IfEnd ↙If N≤D+L-H:Then N-D-G÷2→S:(180S)÷(Rπ) →U:(Rsin(U))+G÷2-G^(3) ÷(240R^(2))-E→A: W→I: M((R(1-cos(U)))+G^(2) ÷(24R)) →B: (180(S-G÷2))÷(Rπ)+(180G) ÷(2Rπ) →K:Goto 1:IfEND↙If N≤D+L:Then D+L-N→S:RH→C:Prog“QJ”:F-P→A:MQ→B:W+OM→I:K→-K:Goto 1 IfEnd ↙If N﹥D+L:Then N-D-L+F→A:W+OM→I:0→B:0→K↙LbI 1: “XP=”:X+Ecos(W)+Acos(I)-Bsin(I)→U◢“YP=”:Y+Ecos(W)+Asin(I)-Bcos(I)→C◢I+KM→Q↙LbI 2: “S(Z)”?Z:S(U)?T↙“XP(Z)=”:U + Zcos(Q-90)→I◢“YP(Z)=”:C + Zsin(Q-90)→B◢“XP(U)=”:U + Tcos(Q+90)→I◢“XP(U)=”:C + T sin(Q+90)→B◢Goto 0↙子程序:QJS-S^(5)÷(40C^2)+S^(9)÷(3456C^(4))→P:S^(3)÷(6C)-S^(7)÷(336C^(3))+S^(11)÷(4224C^(5 ))→Q:(180S^(2))÷(2Cπ)→K:Return说明:本程序由一个主程序QXJS及一个子程序组成,其功能是以直缓点的里程及坐标作起算点,计算出一个完整的曲线(包括圆曲线段,两侧的缓和曲线段,及曲线两端的直线)五段中任意里程的中线及边线坐标。
CASIO fx-5800p测量程序

CASIO fx-4800P、fx-5800P型计算器用于线路施工曲线中线点坐标的计算程序中铁十局三建公司工程技术部摘要:本文介绍了CASIO fx-4800P 、fx-5800P型计算器程序编制用于铁路、公路曲线线路内任意中线点的坐标计算程序及使用方法。
本计算程序具有操作简便、计算快捷、应用广泛等特点、极大地减轻了测量工作者的内业工作量,对于测量工作者有较大的参考和指导作用。
关键词:曲线线路施工测量计算程序1.概述过去,线路中线施工放样基本依靠经纬仪和钢尺了来进行角度及距离测量。
对于曲线线路一般的测量方法是:经纬仪置于某一中线点上,采用偏角法拨角再用钢尺量距来定出中线点。
随着电子技术进步和经济发展,测量仪器和测量方法的不断改进,目前,全站仪已广泛地应用于工程施工测量中,极大的提高了测量工作效率。
但是,在进行铁路、公路工程的曲线线路施工测设时,需要在线路所在区域建立统一坐标系或独立坐标系,利用坐标变换的方法,将整个曲线的三个部分(第一缓和曲线、中间圆曲线、第二缓和曲线)统一到同一坐标系中。
根据坐标系的建立,计算出整个曲线内任意点的坐标,再采用全站仪利用极坐标方法进行施工放样。
前提是首先利用计算器计算出各中线点坐标,然后才能进行放样。
而普通型计算器不仅计算速度慢,且要求计算者必须正确地记忆很多计算公式,计算繁琐而且容易出错,满足不了现场测设工作的要求。
为了能够快速准确地为全站仪提供测设数据,发挥全站仪快速测设的特点,提高测量工作效率,应采用可编程的计算器,编制计算程序。
本文主要介绍应用CASIO fx-4800P型计算器的计算程序,供公司测量同行们参照使用。
2.计算程序QXZBJS(文件名:曲线坐标计算fx-4800P)Defm2:R:L:A:N“ZH:X=”:E“ZH:Y=”:F:“FWJ=”:K“ZH:LC=”: P=L2/(24R)-L4/(2688R3):M=L/2-L3/(240R2):T“T”=(R+P)tng(A/2)+M ◢G=RAπ/180:“S”S=G+L◢LbiA:{C,V}:C“CSDLC=”:V“HXPJ=”:D=C-K:D≤L=>I=D-D5/(40R2L2):U=D3/(6RL)-D7/(336R3L3):J=√(I2+U2):Goto1:≠>D≤G=>O=90(2D-L)/( Rπ):I=RsinO+M:U=R(1-cosO)+P:J=√(I2+U2):Goto2:≠>D=S-(C-K): = D-D5/(40R2L2):Z[2]=D3/6RL-D7/(336R3L3):I=T+(T-Z[1])cosA-Z[2]sinA:U=(T-Z[1])sinA+Z[2]cosA:J=√(I2+U2):Goto3:Lbi1:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-30D2/ (RLπ):H=F-90D2/ (RLπ):≠>Q=F+30D2/ (RLπ):H=F+90D2/( RLπ)⊿ Goto4:Lbi2:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-O:≠>Q= F+tng-1(U/I):H=F+O⊿Goto4:Lbi3:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-(A-90(S-(C-K))2/ (RLπ)): ≠>Q= F+tng-1(U/I):H=F+(A-90(S-(C-K))2/ (RLπ)):⊿ Goto4:Lbi4:B=90+H:H<0=>H“QXFWJ”=B+360◢≠>H≥360=>H“QXFWJ”=H-360 ◢≠>H“QXFWJ”=H◢⊿Goto5:Lbi5: X“CSD:X”=JcosQ+N+VcosB◢ Y“CSD:Y”=JsinQ+E+VsinB◢GotoA3.程序说明3.1 输入已知变量R—圆曲线半径,显示R?L—缓和曲线长,显示L?A—曲线转向角,显示A?E—直缓点纵坐标,显示ZH:X=?N—直缓点横坐标,显示ZH:Y=?F—第一切线方位角,即ZH至JD的方位角,显示FWJ=?K—直缓点里程,显示ZH:LC=?3.2 计算待求量T—切线长度,显示T= …S—曲线全长,显示S= …Z[3]—外矢距,即JD到QZ的距离,显示E0= …3.3 输入待求变量K—输入待求(测设)点的里程,显示LC=?V—横向偏距,即测设点左、右侧外移距的偏移量,若为中线点输入0;右侧输入“+”值,左侧输入“-”值。
线路任意点坐标计算、及任意点对应桩号,左右偏距计算程序.tmp

线路任意点坐标计算、及任意点对应桩号,左右偏距计算程序卡西欧4800、4850系列计算器测量计算程序一、字母含义;K: 表示拟计算位置的线路桩号;H: 表示计算位置距路线中心线的偏距,左偏为正,右偏为负。
T: 各段线路上作为起算点处的切线方位角。
S: 拟计算点到起算点的曲线长。
L: 在圆曲线上表示曲线长,在缓和曲线上表示缓和段长度,在直线上为零。
R: 表示曲线半径,左偏为正,右偏为负E、F: 起算点的坐标值。
M”X1”N”Y1”: 已知点坐标,求其对应位置桩号及左右偏距。
二、程序1、坐标计算(COORD){K,H}:KH“L+,R-”:Prog “DATA”:”(X,Y)=”:X=X+HSinW :Pause 1:Y=Y-HcosW:2、坐标反算线路桩号(FS ZH)Fix 4:M”X1”N”Y1”:LbI 1:Prog “DATA”:PoI (M-X,N-Y):Fixm:J<0=>J=J+360:≠>J=J⊿Abs(Sin(W-J ))=1=>”K=”:K: Pause 1 :“L+,R- =”: H=ISin(W-J):≠>K=K+Icos(W-J): Goto 13、子程序Prog “DATA”K<(第1段与第2段线路分界处的路线桩号)=> T=(第1段起算点处的切线方位角值):S=K-(第1段起算点处的路线桩号):L=(在圆曲线上等于S;在缓和曲线上等于缓和段长度;在直线上为零。
):R=(曲线半径):E=(第1段起算点的X坐标值):F=(第1段起算点的Y 坐标值)≠ >K<(第2段与第3段线路分界处的路线桩号):=>T=(第2段起算点处的切线方向角值):S=K-(第2段起算点处的路线桩号):L=(在圆曲线上等于S;在缓和曲线上等于缓和段长度;在直线上为零。
):R=(曲线半径):E=(第2段起算点的X坐标值)F=(第2段起算点的Y坐标值)≠ >K<(第3段与第4段线路分界处的路线桩号):=>T=(第3段起算点处的切线方向角值):S=K-(第3段起算点处的路线桩号):L=(在圆曲线上等于S;在缓和曲线上等于缓和段长度;在直线上为零。
5800计算器全线坐标计算放样正反算程序
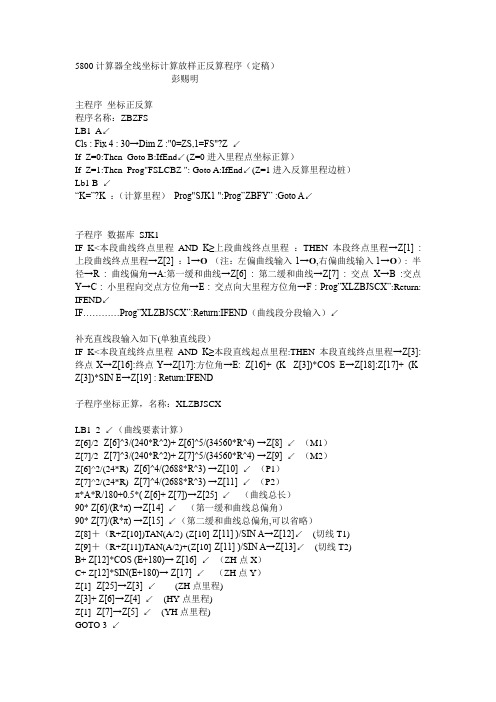
5800计算器全线坐标计算放样正反算程序(定稿)彭赐明主程序坐标正反算程序名称:ZBZFSLB1 A↙Cls : Fix 4 : 30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙(Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCBZ ": Goto A:IfEnd↙(Z=1进入反算里程边桩)Lb1 B ↙“K=”?K :(计算里程)Prog"SJK1 ":Prog”ZBFY” :Goto A↙子程序数据库 SJK1IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→O(注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R : 曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Prog”XLZBJSCX”:Return: IFEND↙IF…………Prog”XLZBJSCX”:Return:IFEND(曲线段分段输入)↙补充直线段输入如下(单独直线段)IF K<本段直线终点里程AND K≥本段直线起点里程:THEN 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z[3])*COS E→Z[18]:Z[17]+ (K- Z[3])*SIN E→Z[19] : Return:IFEND子程序坐标正算,名称:XLZBJSCXLB1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙(曲线总长)90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])TAN(A/2)-(Z[10]-Z[11] )/SIN A→Z[12]↙(切线T1)Z[9]+(R+Z[11])TAN(A/2)+(Z[10]-Z[11] )/SIN A→Z[13]↙(切线T2)B+ Z[12]*COS (E+180)→ Z[16] ↙(ZH点X)C+ Z[12]*SIN(E+180)→ Z[17] ↙(ZH点Y)Z[1]- Z[25]→Z[3] ↙(ZH点里程)Z[3]+ Z[6]→Z[4] ↙(HY点里程)Z[1]- Z[7]→Z[5] ↙(YH点里程)GOTO 3 ↙LB1 3 ↙(判断里程点与曲线关系)IF K≤Z[3] AND K> Z[2] : THEN GOTO 4 : IFEND ↙IF K≤Z[4] AND K> Z[3] : THEN GOTO 5 : IFEND ↙IF K≤Z[5] AND K> Z[4] : THEN GOTO 6 : IFEND ↙IF K≤Z[1] AND K> Z[5] : THEN GOTO 7 : IFEND ↙LB1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : GOTO 8↙LB1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*SIN T+ Z[8]→Z[23] ↙R*(1-COS T)+ Z[10]→Z[24] ↙IF O>0 :THEN T +E→T : ELSE E-T →T : T<0=>360+T→T : IFEND ↙GOTO 8 ↙LB1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]COS A+ Z[12]-U*COS A-V*S IN A→Z[23] ↙Z[13]*SIN A-U*SIN A+V*COS A→Z[24]↙IF O>0 :THEN F-T→T : T<0=>360+T→T : ELSE F+T →T : IFEND ↙GOTO 8 ↙LLb1 8IF O<0 : THEN - Z[24]→Z[24] : IFEND ↙Z[16]+Z[23]*COS E-Z[24]*SIN E→Z[18] ↙Z[17]+Z[23]*SIN E+Z[24]*COS E→Z[19] ↙ReTurn↙子程序反算里程边桩,名称:FSLCBZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的XY坐标):“K=”?K (试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)↙Lb1 2↙Prog"SJK1 ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"S JK1":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else IF Q<S: THEN K+Q→K: Goto 2 :Else IF Q>S :THEN K-Q→K:G oto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)(由于该程序不能准确判断边桩左右方向,暂作修改,取消左右边判定)"K=":K+S→K◢(里程)Return↙子程序坐标放样:ZBFYLB1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视方位角) “QXJ=” :T◢(计算里程点切线方位角,可以不显示)“XI=” : Z[18] ◢(中线X)“YI=” : Z[19] ◢(中线Y)Pol(Z[18]-M,Z[19]-N):"DI=":I(中桩放样距)◢J<0=>J+360→J:"FI=":J→DMS◢(中桩放样方位角)“PJ=”?P◢(输入边桩与线路夹角,左-右+)“PD=”?D◢(输入边桩距)Z[18]+D*COS(T+P) →Z[20] ↙Z[19]+D*SI N(T+P) →Z[21] ↙“XP=”: Z[20] ◢(边桩X)“YP=”: Z[21] ◢(边桩Y)Pol(Z[20]-M,Z[21]-N):"DP=":I◢(边桩放样距)J<0=>J+360→J:"FP=":J→DMS◢(边桩放样方位角)Return↙。
铁路线路任意里程坐标正反算程序使用说明
铁路线路任意里程坐标正反算程序(有需要程序的可联系陈工,QQ:285242895)1、程序开发背景在铁路线路测量中,在曲线要素已定的情况下,已知某点的里程及距中线的距离,计算该点的坐标,我们称之为线路坐标正算。
相反地,已知某点的坐标,确定该点在已定线路中的里程及距中线距离的过程,我们称之为线路坐标反算。
对于一条完整的曲线,它包括直线、第一缓和曲线、圆直线及第二缓和曲线。
而一条完整的铁路线路,通常都包含不止一条曲线,如果我们根据铁路线路多个曲线的曲线要素,构建一个线路模型,然后给出任意里程点,自动计算出对应的线路坐标,也可以给出任意坐标,计算出对应的线路里程和偏距,这将在测量和放样工作有着较为实际的应用。
比如用于逐桩坐标计算、隧道开挖及土石方开挖、线路征地界坐标计算、线路测量中线质量的检查、地质钻孔位置、桥梁桩基坐标计算等方面。
2、程序界面3、程序功能1、可以根据点的里程及距中线的距离,计算出该点的坐标,显示数据文件导入结果及计算结果,最后以csv格式文件保存计算的里程数据成果及曲线要素。
2、可以根据任意点的坐标,计算出点在已定线路中的里程及距中线距离,同时显示数据计算结果,最后以.zb格式文件保存计算的坐标成果。
4、程序特色3.1 本程序采用易于交互操作的对话框模板和MSFlexGrid控件,在MFC开发环境下利用VC语言进行编写,整个程序的计算过程及结果均可在图表中直接呈现,便于数据的检查,整个程序的界面简洁直观,功能清晰、易学易用。
3.2 结合铁路测量的实际情况,在导入曲线要素时,不需要输入曲线的五大桩要素以及曲线偏向,只需要曲线数据文件中包含曲线半径、缓长及曲线两侧各两个直线点坐标,就可以计算出其他曲线要素,进而构建完整的线路模型。
3.3 在线路正算时,里程数据既可以从文件中导入,也可以在程序界面上获取。
当采用从文件导入时,里程数据可以是乱序排列的。
当从界面获取时,程序可以自动计算出连续里程数据,3.4 在线路反算中,当我们给定任意点的坐标时,程序不仅可以计算出对应线路中的里程、距离及垂点坐标,还可以计算出此点是否在线路对应范围内以及位于曲线上的具体位置。
根据偏距和高程画断面图

根据偏距和高程画断面图根据已知的偏距和高程,使用TXT记事本编辑如下格式的CASS断面里程文件,然后将.TXT文件扩展名后缀修改为.HDM文件扩展名后缀。
断面里程文件扩展名是“.HDM”,总体格式如下:BEGIN[断面里程][断面序号]第一点里程,第一点高程,第二点里程,第二点高程NEXT另一期第一点里程,第一点高程,另一期第二点里程,第二点高程说明①每个断面第一行以“BEGIN”开始;“断面里程”参数多用在道路土方计算方面,表示当前横断面中桩在整条道路上的里程,如果里程文件只用来画断面图,可以不要这个参数;“断面序号”参数和下面要讲的道路设计参数文件的“断面序号”参数相对应,以确定当前断面的设计参数,同样在只画断面图时可省略。
②各点应按断面上的顺序表示,里程依次从小到大。
③每个断面从“NEXT”往下的部分可以省略,这部分表示同一断面另一个时期的断面数据,例如设计断面数据,绘断面图时可将两期断面线同时画出来,如同时画出实际线和设计线。
断面里程文件示例数据:BEGIN0.0,3.26100.0,3.76113.5,4.13116.5,4.13152,3.68166,3.73200,3.41300,3.39400,4.03500,4.2600,4.05700,4.26800,3.54900,3.63961.5,3.73966.5,3.771000,3.021100,3.831200,4.1可以将以上数据复制下来,保存为1.HDM文件。
2.使用cass“工程应用”菜单下的“绘断面图”--》“根据里程文件”功能,绘制出一条完整的断面图。
坐标正算、反算计算方法及在Excel中的VBA编程
坐标正算、反算计算方法及在Excel 中的VBA 编程测量中经常需要将某点相对坐标系坐标转换成线路的里程、偏距,或根据线路某一里程偏距计算出对应的相对坐标系坐标,为寻求一种快速简单高效的计算方法,本文对线路正算反算的原理进行了阐述,并结合Excel VBA 编程,将编程和Excel 的拖拽的功能相结合,编制出实用计算表,特别适用于需要大量计算边桩、围护桩的情况。
关键词:坐标方位角坐标正算坐标反算 V AB 编程循环迭代直接算法一、坐标方位角的反算1.坐标方位角反算如图1所示,已知点A 、B 的坐标,求直线AB坐标方位角α。
图1坐标方位角反算直线AB 之间的坐标增量:AB B AAB B Ax x x y y y ∆=−∆=−当0,0AB AB x y ∆>∆>时,角α位于第一象限角:arctan ABABy x α∆=∆当0,0AB AB x y ∆<∆>时,角α位于第二象限角:arctan 180AB ABy x α∆=+°∆当0,0AB AB x y ∆<∆<时,角α位于第三象限角:arctan 180AB ABy x α∆=+°∆当0,0AB AB x y ∆>∆<时,角α位于第二象限角:arctan360AB AB y x α∆=+°∆2.坐标方位角反算的VBA 编程可用VBA 将上述过程定义为一个名为angel()的函数,代码如下:Function angel(x0As Double, y0 As Double, x1 As Double, y1 As Double) As Double dx = x1- x0dy = y1- y0If dx > 0 And dy > 0 Thenangel = Atn(dy / dx)End IfIf dx < 0 And dy > 0 Thenangel = Atn(dy / dx) + 3.14159265358979End IfIf dx < 0 And dy < 0 Thenangel = Atn(dy / dx) + 3.14159265358979End IfIf dx > 0 And dy < 0 Thenangel = Atn(dy / dx) + 3.14159265358979 * 2End IfEnd Function二、直线段坐标正算与反算1.直线段正算图2直线段计算已知HZ 点坐标(x1,y1)、里程N HZ ,ZH 点坐标(x2,y2),正算时已知P 点对应的中桩里程Np 和偏距e (规定沿着线路前进方向,左边偏距为负,右边偏距为正),Np>N HZ ,求P 点对应的坐标。
Creo 3.0 ECAD-MCAD协同操作指南20190319

CREO3.0 ECAD-MCAD 协同操作指南
帮助文档
2019-3-19
0
Creo 3.0 ECAD-MCAD 协同操作指南
目录
1 ECAD 概述....................................................................................................................... 1
2.2.1 关于所有 ECAD 设计的设置 ................................................................ 1
2.2.2 关于设置快速导入的默认值 ................................................................... 3
3.1
关于设计过程中的 Creo Parametric ECAD ................................................. 16
3.2
建议的设计顺序 ............................................................................................. 17
2.4
ECAD 装配的设置 ........................................................................................ 11
2.4.1 关于 ECAD 装配的设置 ...................................................................... 11
趋近法求算缓和曲线里程及偏距的计算原理

说明:线路平面由圆曲线、缓和曲线、直线三个线元组成,通过坐标反算里程及偏距是施工测量必不可少的一步。
其中较难处理是缓和曲线部分,现将缓和曲线反算里程及偏距的思路及原理写出来,与各位测量同仁一起探讨,不妥之处敬请斧正。
1.平面缓和曲线四种类型及其切垂距和偏距计算模型左入左出右入右出把以上左转曲线和右转曲线公式进行整理分析。
左转:入缓和曲线(X-P)*cos(-β)+(Y-Q)*sin(-β)→D(Y-Q)*cos(-β)-(X-P)*sin(-β)→C出缓和曲线(X-P)*cos(β)+(Y-Q)*sin(β)→D(Y-Q)*cos(β)-(X-P)*sin(β)→C右转:入缓和曲线(X-P)*cos(β)+(Y-Q)*sin(β)→D(Y-Q)*cos(β)-(X-P)*sin(β)→C出缓和曲线(X-P)*cos(-β)+(Y-Q)*sin(-β)→D(Y-Q)*cos(-β)-(X-P)*sin(-β)→C假设变量W为曲线方向判别符号,且规定W=1为右转,W=-1为左转,旋转角β=K,则以上公式简化为:入缓和曲线(X-P)×cos(W×K)+(Y-Q)×sin(W×K)→D(Y-Q)×cos(W×K)-(X-P)×sin(W×K)→C出缓和曲线(X-P)×cos(-W×K)+(Y-Q)×sin(-W×K)→D(Y-Q)×cos(-W×K)-(X-P)×sin(-W×K)→C2.趋近法求算缓和曲线里程及偏距(以上推导公式的应用)HHQX1 (计算入缓和曲线里程及偏距)程序清单:X:?Y:?W:(输入切线坐标和线路转向参数,1为左转,-1为右转X-S ZH→L:(测点对应缓和曲线长,估计值D O:S ZH+(L-L5÷(40×R2×l012)+ L9÷(3456×R4×l014))→P: W×(L3÷(6×R×l01)- L7÷(336×R3×l013))→Q:90×L2÷(π×R×l01)→K: (X-P)×cos(W×K)+(Y-Q)×sin(W×K)→D: (Y-Q)×cos(W×K)-(X-P)×sin(W×K)→C: L+D →L: LpWhile Abs(D)≥0.001: (循环语句。
RTK测量操作步骤(共42张PPT)

五、参数设置---作业文件名
五、参数设置---椭球设置
五、参数设置---投影参数设置
五、参数设置---四参数设置
五、参数设置---七参数设置
五、参数设置---高程拟合参数设置
六、求转换参数---控制点坐标库
六、求转换参数---输入已知坐标
六、求转换参数---增加原始点坐标
六、求转换参数---保存及查看参数
选择了文件之后,我们就可以选 取某个中桩的横断面进行放样,如 图,我们放样的是中桩为120的 横断面.图中的直线段就是该横断 面的法线延长线,这样我们就可 以非常方便的放样这个横断面 上的点.
十一、断面测量
在线路放样功能界面下,我们
既可以放样,同时也可以进行
纵横断面的测量,横断面的测 量可以在断面放样中完成,
十、线路放样---参数设置
十、线路放样---参数设置
最小值,最大值:点放样下面的圆圈提示和报警提示,当离放样点的距离小于最大值并且选择了 声音提示时,就给出声音提示。
北方向、线方向:线路放样和点放样两种方向指示模式的互相切换。 属性赋值里程:测量点时是否把里程作为属性。 显示所有放样路线:如果选择了就显示所有的放样路线。 显示标志点:如果选择了就在图中显示所有的标志点。 显示加桩点:如果选择了就在图中显示所有的加桩点。
十、线路放样----放样
在放线库中调入设计文件选择进 行线路放样以后放样界面。
路放样实际上是点放样的线路表现形 式既在点放样时以设计的线路图为底图, 实时的显示当前点在线路上的映射点(当 前点距线路上距离最近的点)的里程和前 进方向的左或右偏距。在图中会显示整个 线路和当前测量点,并实时计算当前点是 否在线路范围内,如果在线路范围内,就 计算出到该线路的最近距离和该点在线路 上的映射点的里程;如果不在线路范围内 ,就给出提示。
线路里程、偏距与坐标互算方法及其计算机实现
线路里程、偏距与坐标互算方法及其计算机实现吴坤;李继【摘要】传统方式实现线路里程、偏距与坐标互算,工作量大,精度难以保证.为此利用平面几何计算和微积分思想,探索一种新的通用算法,可以脱离图纸,纯粹利用线路数据实现里程、偏距与坐标互算.利用该算法编写计算机程序,实现了全自动互算线路里程、偏距与坐标的功能.【期刊名称】《城市轨道交通研究》【年(卷),期】2018(021)010【总页数】4页(P79-82)【关键词】线路;里程;偏距;坐标;互算;计算机实现【作者】吴坤;李继【作者单位】林同棪国际工程咨询(中国)有限公司,401121,重庆;林同棪国际工程咨询(中国)有限公司,401121,重庆【正文语种】中文【中图分类】U231.2线路里程、偏距与坐标互算在轨道交通设计中经常遇到。
线路专业经常需要把线路中心线周边一系列点提供给地勘单位进行钻孔勘探。
待勘点由建筑、结构等专业确定。
由于建筑、结构等专业制图比例并非1∶1 000,且不一定在原位制图,所以只能将待勘点以里程、偏距的形式提供给线路专业。
而在线路敷设前期,地勘单位无法以里程、偏距放样,线路专业需将待勘点信息转化成坐标,以便勘探定位。
同理,地勘单位返回的勘探结果以坐标表示点信息,线路专业需将其转化为里程、偏距形式反馈给各专业。
传统做法是线路专业将各专业提供的待勘点里程偏距信息绘制于图纸上,然后再一一查询坐标,填写表格;对于地勘单位返回的勘测结果,处理方式类似。
线路专业需将待测点绘制在图纸上,然后量出对应的里程、偏距,填写表格。
此过程工作量十分巨大,且极易出错。
而国内主流轨道交通线路设计软件均无线路里程、偏距与坐标互算功能。
因此,十分有必要开发一款线路里程、偏距与坐标互算的软件。
通过程序互算里程、偏距与坐标,无法借助于图形进行直观判断,传统基于图形的测量算法无法应用。
本文结合轨道交通线路基本知识,借助解析几何手段和微分思想,着重研究线路里程、偏距与坐标互算的计算机算法。
车辆动态响应检测数据里程偏差二次修正快速计算方法
第40卷,第4期中国铁道科学Vol.40No.4 2019年7月CHINA RAILWAY SCIENCE July,2019文章编号:1001-4632(2019)04-0112-08车辆动态响应检测数据里程偏差二次修正快速计算方法秦航远1,刘金朝彳,王卫东1,孙善超$(1.中国铁道科学研究院,北京100081;2.中国铁道科学研究院集团有限公司基础设施检测研究所,北京100081)摘要:为提高车辆动态响应检测数据里程信息的准确性,提出里程偏差二次修正方法,即以台账信息中曲线段真实里程为参考,对轨道几何检测数据里程偏差进行一次修正,再以修正后的轨道几何检测数据中速度为参考,对车辆动态响应检测数据进行二次修正,修正中采用五点迭代法以提高参考里程与待校里程相关性分析的计算效率。
五点迭代法首先对参考里程进行等间隔分段,计算各间断点处相关系数,以其中最大值点为中心逐次缩小数据范围,最终求得参考里程与待校里程的最佳匹配位置。
在此基础上,构建车辆动态响应检测数据里程偏差的一次修正模型和二次修正模型,并以算例验证修正方法的准确性及快速性。
结果表明:与传统逐点计算方法比,五点迭代法能在保证里程偏差修正准确性的前提下节省计算时间达89%以上;修正后的车辆动态响应检测数据里程与真实里程接近,误差在3m以内,证明此方法具有高度可行性。
关键词:线路里程;里程偏差修正;五点迭代法;逐点计算方法;车辆动态响应;轨道几何中图分类号:U213.42;U211.5文献标识码:A doi;10.3969/j.issn.1001-4632.2019.04.14基于高速综合检测列车和轨道检测车等先进轨道检测设备以及数据分析手段,铁路研究及技术人员能识别轨道上存在的病害问题,如轨道的几何不平顺、波浪形磨耗、剥离掉块、焊缝不良等,并及时反馈给一线安全维护人员,及时排除安全隐患,对降低维修成本及保障旅客安全起到重要作用口刃o 然而,无论是以激光扫描和图像处理为主要技术手段的轨道几何检测(Track geometry measurement,TGM)技术⑷,还是基于轴箱振动加速度(Axle-box acceleration,ABA)或轮轨力(Wheelfail force,WRF)的车辆动态响应检测(Vehicle dynamic measurement,VDM)技术,均存在一个普遍问题即检测里程与真实里程间存在差异。
高速铁路线路内任意点计算中桩里程及偏距算法优化

高速铁路线路内任意点计算中桩里程及偏距算法优化张攀华;冯开利【摘要】在常规数学模型的基础上,提出了任意点与线路关系新的计算方法,并对现有的曲线计算数学模型进行了优化,可快速计算地面上任意点在线路中的里程及偏距.【期刊名称】《铁道建筑技术》【年(卷),期】2014(000)003【总页数】4页(P118-121)【关键词】高速铁路;任意点;中桩里程;反算优化【作者】张攀华;冯开利【作者单位】中铁二十二局集团第三工程有限公司福建厦门361000;中铁二十二局集团第三工程有限公司福建厦门361000【正文语种】中文【中图分类】U212.31 引言施工放样贯穿于高铁建设的整个过程,实际的施工放样通常是根据设计图纸里程,求解出该里程对应的中桩坐标,以及法线偏距的边桩坐标。
往往在实际施工中经常会遇到与其相反的情况,即由中线外某点坐标反算出该点对应的中桩里程,以及法线上的偏距。
如隧道断面检测,路基堑坡开挖放样等,就需要在得到目标点坐标后快速的获取对应的里程、偏距;又如在施工结束后,对路基、结构物的复测中,通过对结构物实测,需要快速算出施工与设计的偏差。
坐标反算首先就要确定目标点所在线元,在过去通常需要大家输入一个估算的中桩里程,然后直接采用迭代的方法解决反算问题。
假如输入估算里程与实际中桩里程偏差太大,就可能造成无法反算,一旦出现这种情况,大多程序就会从线路的第一线元开始计算,至计算到线路的最后一个线元;反算的过程就是进行若干次迭代计算,满足精度后,就认为已经求解出对应的中桩近似里程。
线路越长迭代计算的时间就越长,这种计算方法明显的效率不足。
根据现场测量实践经验,总结出一种简单快捷的计算方法,可快速判断出目标点是否在线路中及所在的线元,并对常规反算数学模型进行了优化,从而大大提高计算速度与作业效率。
2 算法与公式推导2.1 要素与代码说明所使用的曲线要素名称有:线路起点QD、线路切线交点 JD、线路终点 ZD,线元起点 A,线元终点B。
看看:4850里程程序(坐标反算里程_)

看看:4850里程程序(坐标反算里程_) DK﹥LDDefm 22←R“R=”:C“L0=”:F“ZUO=-1,YOU=1”:A“PJ=”:B“T0=”:Z“JD-DK=”:G“JDX”:V “JDY”:Z[1]=B:Z[2]=Z:Z[3]=G:Z[4]=V←I=0: J=0: M=C/2-C3/(240R2):P=C2/(24R)-C4/(2688R3):D=90C/(лR):T=(R+P)tan(A/2)+M:K=ЛRA/180+C:J=B+AF:prog“JD”:Z[21]=J:Z[22]=Z-T+K: Z[5]= G-TcosB:Z[6]=V-TsinB:Z[7]=Z[5]+McosB+(R+P)cos(B+90F):Z[8]=Z[6]+MsinB+ (R+P)sin(B+90F)←U=C-C5/(40R2C2):H=C3/(6RC)-C7/(336R3C3): pol(H,U):J=90-J :prog“JD”:J=B+JF: prog“JD”←Z[9]=Z[5]+IcosJ:Z[10]=Z[6]+IsinJ:Z[11]=G+Tcos(Z[21]): Z[12]=V+Tsin(Z[21])←Pol(Z[10]-Z[8],Z[9]-Z[7]): J=90-J: prog“JD”:Z[13]=J←J=J+(A-2D)F: prog“JD”:Z[14]=J←“CE DIAN”←{XY}:X“XN=”:Y“YN=”:pol(Y-Z[8],X-Z[7]) ←J=90-J: prog ▲LbI0:“JD”:W=J: J=J-Z[13] ←prog“JD”:Z[15]=J←J=W-Z[14] ←prog “JD”:Z[16]=J←F=1=﹥Goto1≨F=-1=﹥Goto2≨←LbI1:←Z[15]﹥180=﹥Goto3≨←Z[16]≦180=﹥Goto5:≠﹥Goto4≨←LbI2:←Z[15]﹤180=﹥Goto3≨←Z[16]﹥180=﹥Goto5:≠﹥Goto4≨←LbI3:←“H1”▲Pol(Y-Z[6],X-Z[5]):J=90-J: prog“JD”←J=J-Z[1]+90: prog“JD”←S=IsinJ ←S﹥0=﹥L=0:Goto6≨←S≦0=﹥“DK=”:Z[19]“DK”=Z[2]-T+S▲F=1=﹥“LD=”:Z[20]“LD”=-FIcosJ▲≠﹥“LD=”:Z[20]“LD”=FIcosJ▲≨Goto0←LbI4:←“Y”▲F=-1=﹥Z[15]=360-Z[15] ≨“DK=”:Z[19]“DK”= Z[2] -T+C+ЛR(Z[15])/180▲F=1=﹥“LD=” :Z[20]“LD”=-(I-R)▲≠﹥“LD=” :Z[20]“LD”= I-R▲≨Goto0←LbI5:←“H2”▲Pol(Y-Z[12],X-Z[11]):J=90-J: prog“JD”:W=J: J=Z[21]-90:prog“JD”:J=W-J:prog“JD”:S=IsinJ: S<0=﹥L=0:S=-S←Goto7≨←S≥0=﹥“DK=”:Z[19]“DK”=Z[22]+S▲≨F=1=﹥“LD=” :Z[20]“LD”=-FIcosJ▲≠﹥“LD=” :Z[20]“LD”= FIcosJ▲≨Goto0←LbI6: ←L=L+S:U=L-L5/(40R2C2):H=L3/(6RC)-L7/(336R3C3): Pol(H,U):J=90-J: prog“JD”:W=J:J=Z[1]+WF: prog“JD”:Z[17]= Z[5]+IcosJ:Z[18]=Z[6]+IsinJ ←J=J+2WF:prog“JD”:J=J-90: prog“JD”:W=J←Pol(Y-Z[18],X-Z[17]):J=90-J: prog“JD”←J=J-W: prog“JD”:S=IsinJ:AbsS ﹥0.001=﹥Goto6≨←“DK=”:Z[19]“DK”=Z[2]-T+L+S▲F=1=﹥“LD=” :Z[20]“LD”=-FIcosJ▲≠﹥“LD=” :Z[20]“LD”= FIcosJ▲≨Goto0←LbI7: ←L=L+S:U=L-L5/(40R2C2):H=L3/(6RC)-L7/(336R3C3): Pol(H,U):J=90-J: prog“JD”:W=J:J=Z[21]-180-WF: prog“JD”←Z[17]= Z[11] +IcosJ:Z[18]= Z[12]+IsinJ:J=J-2WF: prog“JD”←J=J-90: prog“JD”:W=J ←Pol(Y-Z[18],X-Z[17]): J=90-J: prog“JD”←J=J-W: prog“JD”←S=IsinJ:AbsS﹥0.001=﹥Goto7≨←“DK=”:Z[19]“DK”=Z[22]-L-S▲F=1=﹥“LD=” :Z[20]“LD”=FIcosJ▲≠﹥“LD=” :Z[20]“LD”=-FIcosJ▲≨Goto0←JDJ﹤0=﹥J=J+360≨←J≧360=﹥J=J-360≨←看看:4850里程程序(坐标反算里程_) 此程式为已知某点坐标计算该点里程和距线路中心距离程式,适用于两端等缓和曲线长之曲线。
思拓力RTK操作流程
北半球测绘仪器有限思拓力S9/S6系列RTK软件操作流程呼和浩特市北半球测绘仪器有限公司思拓力RTK操作步骤一.新建工程P7手簿采用的Moble的系统,开机的系统界面如下图:我们点击开始菜单,在开始菜单的列表里选择我们的手簿软件SurPad2.0,如下图:打开软件后点击-新建,如下图:输入新建工程名称,默认的是手簿系统时间,输入时点击会切换出软件盘,也可以用键盘输入,输入完成后点对勾点确定:确定之后会来到我们连接仪器的界面如下图:仪器型号选择S9/S6,点击蓝牙如下图:如果手簿里有你的仪器号和对应的COM 口这直接选择并点确定,如果没有那么我们需要给手簿配置一下蓝牙,点击“配置蓝牙设备”如下图:点击添加新设备,让手簿搜索你的主机蓝牙号,如下图:图:软件提示已建立连接,点击完成,如下图:点击端口选项,为主机蓝牙配置端口,如下图:点击新建端口,选中我们的主机号,点击下一步,如下图:用的端口,如下图:图:然后点击连接,手簿开始连接仪器,如下图:工程的坐标系统参数的界面,如下图:在这里我们首先设置椭球参数,点击椭球参数,在下拉列表里选择你控制点坐标系统的椭球,如国家80,如下图:选择好后点击确定,然后设置投影参数,点击投影参数,在下拉列表里选择你的投影方式,一般为高斯投影,这里没有六度和三度之分,高斯投影已涵盖了。
然后设置你的中央子午线经度,如果知道直接输入,如果你是三度带的话,不知道当地的中央子午线,点击旁边的A,软件会自动算出并添加(这里是指手簿连上仪器,并且仪器应经锁定卫星的情况),六度带和自定义只能自己添加了,如下图:点击确定,在点击确定,然后选择工程测量,点击关闭,如下图:到这里,新建工程,就建好了,如果你是提前建工程的话,那么连接仪器就可以省略了,出来设置仪器的时候在进行连接,在通讯设置里连接就可以了。
二.设置仪器(一)基准站设置手簿连上基准站后,点击仪器,选择工作模式如下图:在工作模式里选择基准站模式设置,如下图:在这里挨个设置就可以了,设置启动模式设置,这里选择使用单点坐标,基站ID可以不输入,其他按默认设置就行,开机自动启动选中,最后点确定,如下图:然后设置选项设置,选项设置里差分模式一般选择RTCM30和CMR,启用Glonass和启用北斗都√上,(这里要注意三星仪器的话,只有选择CMR才有三星效果)高度截止角0-45度都行,一般建议5-15度任意选择。