2015-509自动化学院人形智能机器人
什么是机器人学,它们在机器人工程和人工智能中有哪些应用?

什么是机器人学,它们在机器人工程和人工智能中有哪些应用?机器人学是一门跨学科的学科,集成了电气工程、计算机科学和机械工程等领域的知识,研究如何设计、建造、操作和控制机器人。
机器人学在工程领域拥有广泛的应用,它们的出现已经改变了许多行业的生产效率、质量和可靠性,还可以在危险、高风险和无人区进行人类无法接触的任务。
在人工智能领域,机器人还可以进行语音识别、语音合成、面部识别、自然语言处理、图像处理等各种复杂的智能学习和应用。
下面将会对机器人学的应用进行详细介绍:1、制造业机器人在制造业中已经成为一种基础设施,它们可以加速生产效率,提高产品质量,降低劳动力成本。
特别是在汽车制造业中,机器人可以完成一系列的任务,如点焊、冲压、喷漆、搬运等。
高速无错、不知疲倦,机器人在汽车制造业中得到了广泛的应用。
2、医疗应用随着人口老龄化,医疗机器人不仅可以缓解医护人员的劳动强度,还可以提高医疗服务的精度和效率。
例如,手术机器人可以实现高精度、微创的手术,减少患者的痛苦和住院时间;康复机器人可以通过物理治疗和训练,帮助病人恢复功能。
3、服务机器人随着社会的发展和人口老龄化问题的愈加突出,服务机器人必须得到大规模的应用。
例如,清洁机器人可以代替人工完成清洁、消毒、除尘等工作;配送机器人可以在物流配送中扮演更加有效率的角色;教育机器人可以为学生提供更加互动性、有效性的教育。
结论:机器人学在机器人工程和人工智能领域的应用是非常广泛的,不光在工业化、医疗、服务等领域有广泛的应用,而且在未来人类的发展中,机器人助手甚至可能实现“智能搭档”,与人类合作完成更多的事情。
因此,我们需要关注和研究机器人学,努力把机器人智能化的梦想变成现实。
乐聚:以人形机器人赋能人工智能教育

乐聚:以人形机器人赋能人工智能教育一、乐聚人形机器人的特点乐聚人形机器人是乐聚与人工智能、机器人技术等相关领域的专家团队合作开发的一款全新产品。
与传统的学习软件不同,乐聚人形机器人具有如下独特的特点:1. 仿真度高:乐聚人形机器人外形逼真,具有人体结构和肢体动作,能够模拟真人的动作表情和交流方式,使得学生与机器人之间的交互更加自然流畅。
2. 语音交互:乐聚人形机器人搭载了语音交互系统,能够进行语音识别和语音合成,从而与学生进行实时的语音交流,帮助学生进行口语的训练和提高。
3. 智能教学:乐聚人形机器人内置了丰富的教学内容和资源,能够根据学生的学习情况和反馈进行智能调整,对学生进行个性化的教学指导。
4. 互动性强:乐聚人形机器人具有丰富的互动功能,不仅可以回答学生的问题、进行教学演示,还可以和学生进行一对一或一对多的互动对话,使得学习过程更加生动有趣。
乐聚人形机器人以其独特的特点,可以在多个教学场景下进行应用:1. 语言学习:对于外语的学习,乐聚人形机器人能够成为学生的语言学习伙伴,通过语音交互和口语训练,提高学生的口语表达能力。
2. 科学教育:在科学教育领域,乐聚人形机器人可以扮演一个科学小助手的角色,通过动作演示、实验展示等方式,给学生带来更加直观丰富的科学学习体验。
3. 编程教育:在编程教育领域,乐聚人形机器人可以成为学生的编程实验对象,让学生通过对其进行编程,了解代码和算法的原理,提高他们的计算机逻辑思维能力。
4. 兴趣教育:对于其他兴趣教育项目,比如艺术教育、体育教育等,乐聚人形机器人也可以进行应用,给学生带来更加高品质的兴趣体验。
作为乐聚公司在人工智能教育领域的创新尝试和突破,乐聚人形机器人积极探索和应用,为人工智能教育的未来发展开辟了新的道路。
乐聚人形机器人能够填补人工智能教育领域的空白,提高教学效果和效率。
传统的教学方式可能存在一对多的教学模式,教学内容相对单一,而且对学生的反馈和调整可能不够及时,而乐聚人形机器人能够借助人工智能技术,实现个性化智能教学,提升教学效果和教育体验。
人形机器人的控制系统设计与实现

人形机器人的控制系统设计与实现近年来,随着科技的不断进步和人工智能技术的发展,人形机器人逐渐被广泛应用于工业、服务和医疗等领域。
而对于人形机器人的控制系统设计和实现,也成为了相关领域的重要课题之一。
一、人形机器人的控制系统设计要求首先,人形机器人的控制系统要具备高度的稳定性和精度,能够有效地实现各个自由度的控制。
此外,还需要考虑到机器人的运动速度、运动范围和运动模式等方面,以实现更加灵活和高效的工作效果。
其次,人形机器人的控制系统还需要具备较强的自主智能和学习能力,能够对外部环境和任务变化做出及时的反应和调整。
此外,对于一些需要更高精度和实时性的任务,还需要人形机器人具备较高的控制信号处理和响应速度。
最后,人形机器人的控制系统在设计时还应考虑到复杂的机械结构、传动机构和传感器的接入方式等问题,以实现较高的运动精度和控制精度,并确保安全性和可靠性。
二、人形机器人的控制系统实现方法在实际应用中,人形机器人的控制系统通常采用多层次控制结构实现,包括感知层、运动控制层和高层决策层等。
其中,感知层主要用于获取机器人所处环境和自身状态等信息,包括传感器和摄像头等;运动控制层主要用于实现机器人各自由度的运动控制,包括执行机构和电机驱动等;高层决策层主要用于实现机器人的自主决策和任务规划,包括人工智能和机器学习等。
在实际控制过程中,人形机器人的控制系统通常采用开放式控制系统(OCS)或封闭式控制系统(CCS)实现。
其中,开放式控制系统主要用于实现人形机器人的自主行为和学习,具有较高的灵活性和智能性;封闭式控制系统主要用于实现特定任务的高精度控制和安全性保障,具有较高的稳定性和可靠性。
在具体实施过程中,人形机器人的控制系统还需要结合具体的应用领域和任务需求,选择合适的控制算法和模式,包括PID控制、模糊控制、神经网络控制和遗传算法控制等。
三、人形机器人控制系统发展趋势随着人工智能技术和机器学习技术的不断发展和应用,人形机器人控制系统正在向更加智能化和自主化方向发展。
工业机器人的基础知识
图1-1 Unimate 机器人
2)初级阶段(20世纪60—70年代) 1961年,德沃尔的Unimation公司为通用汽车生产线安装了第一台用于生产的工
业机器人,它主要用于生产门窗把手、换挡旋钮、灯具和其他汽车内饰用五金件。 1978年,日本山梨大学牧野洋发明SCARA机器人(见图1-2),该机器人具有
将串联机器人和并联机器人有机结合起来的工业机器人,称为混联机 器人。混联机器人既有并联机器人刚度好的优点,又有串联机器人工作范 围大的优点,进一步扩大了机器人的应用范围。
2.按操作机坐标形式分类
工业机器人按操作机坐标形式的不同,可分为直角坐标机器人、圆柱坐标机器人、 球坐标机器人和多关节机器人等。
四个轴和四个运动自由度,特别适合于装配工作,如今被广泛应用于汽车工业、电 子产品工业、药品工业和食品工业等领域。
图1-2 SCARA机器人
3)迅速发展阶段(20世纪80—90年代)
1981年,通用汽车公司第一次将CONSIGHT机器视觉系统成功地应用在了一个 恶劣的制造环境中,利用三台工业机器人以每小时1400个的速度分拣出六种不同的 铸件。
工业机器人基础
工业机器人的基础知识
1.1 工业机器人的定义及特点
用来进行搬运机械部件或工件的、可编程序的多功能操作器,或通过 改变程序可以完成各种工作的特殊机械装置。
工业机器人有以下几个特点:
1.可编程
生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境 变化的需要而再编程。因此,它在小批量、多品种、均衡、高效的柔性制 造过程中能发挥很好的作用,是柔性制造系统中的一个重要组成部分。
1)高性能 2)机械结构向模块化、可重构化发展 3)本体结构更新加快 4)控制技术的开放化、PC化和网络化 5)多传感器融合技术的实用化 6)多智能体协调控制技术
人形机器人

美国麻省理工学院研制出了一种有着像人一样眼睛的新型机器人,它能与人类进行交流,能对周围的环境做 出回应,并能协助人类完成许多工作。我国也在这方面作了很多工作,国防科技大学、哈尔滨工业大学研制出了 双足步行机器人,北京航空航天大学、北京科技大学研制出了多指灵巧手等。
人形机器人
仿人机器人
01 构成
03 发展 05 语源
目录
02 特点 04 热点事件 06 近义词·相关词
人型机器人(英语:Android),又称仿生人,音译安卓,是一种旨在模仿人类外观和行为的机器人(robot) 尤其特指具有和人类相似肌体的种类。直到最近,人型机器人的概念还主要停留在科学幻想领域,常见于电影、 电视、漫画、小说等。机器人学方面的进展已经可以设计出功能化拟真化的人形机器人(humanoid robot)。
2010年6月16日日本东京大学和大阪大学组成的科研小组向公众展示了一款仿真婴儿机器人,它就是一款最 新的人形机器人。这个名叫“野尾”的婴儿娃娃身高71厘米,在柔软的仿真皮肤下面共有600个传感器,可以做 出伸手、转头等动作。当被拥抱时,忽闪着大眼睛好奇地看着世界,十分可爱。
热点事件
深圳机器人产业快速发展
近义词·相关词
Cyborg与Bioroid
Actroid
类人型机器人 Humanoid Robot
表演机器人(日语:アクトロイド)。Actroid是将actor(演员)和android组合而成的合成词。目前特指 日本大阪大学和Kokoro公司开发的一种外观上非常形似人类的仿生人。初展于2003年东京国际机器人展。随后又 开发出多种不同版本。她可以模拟眨眼、说话、呼吸等似人行为。这种Repliee系列的交互式仿生人具有识别和 处理语言并且作出回应的能力。
阿尔法智能人形机器人

阿尔法智能人形机器人近年来,人工智能技术的迅猛发展使得智能机器人逐渐成为现实。
其中,阿尔法智能人形机器人作为一种具有高度智能化和仿真人形外观的机器人,引起了广泛的关注。
本文将探讨阿尔法智能人形机器人的应用领域、技术特点以及对未来社会的影响。
一、阿尔法智能人形机器人的应用领域1.家庭助理阿尔法智能人形机器人能够识别人的面部表情和语言语调,掌握家庭成员的喜好和习惯,提供个性化的服务。
它可以帮助老人照料日常生活,为小孩提供学习指导,还可以协助家庭成员进行日程管理和物品寻找,大大提高了生活的便捷性。
2.医疗护理阿尔法智能人形机器人可以承担老年护理和康复辅助等工作。
其通过搭载传感器和视觉系统,可以监控老人的健康状况、记录生理参数,并在出现紧急情况时发出警报。
此外,机器人还能进行康复训练,并提供互动活动,促进老年人身心健康。
3.教育培训阿尔法智能人形机器人可以在学校、培训机构等场所担任教师助理的角色。
它可以与学生进行互动,解答问题,纠正错误,并根据学生的学习情况进行个性化的辅导。
机器人的出现不仅可以拓宽学生的知识面,还可以培养学生的创造力和解决问题的能力。
二、阿尔法智能人形机器人的技术特点1.人脸识别技术阿尔法智能人形机器人通过多模态传感器获取人类的视觉、听觉、触觉和语言等信息,利用深度学习算法和人工神经网络进行数据处理和分析,实现了对人脸的识别和情感识别。
2.自然语言处理技术机器人能够理解和使用自然语言,实现与人的对话交流。
通过自然语言处理技术,机器人可以识别语音指令、回答问题,并能够进行语音合成,使得与机器人的交互更加便捷自然。
3.机器视觉技术阿尔法智能人形机器人利用机器视觉技术对周围环境进行感知和识别,能够实现障碍物的避障、物品的分类和识别等功能。
同时,通过人脸识别和目标追踪等技术,机器人可以识别和追踪特定的人物。
三、阿尔法智能人形机器人对未来社会的影响1.劳动力替代与就业变革随着阿尔法智能人形机器人的普及应用,某些劳动力密集型行业可能会受到冲击。
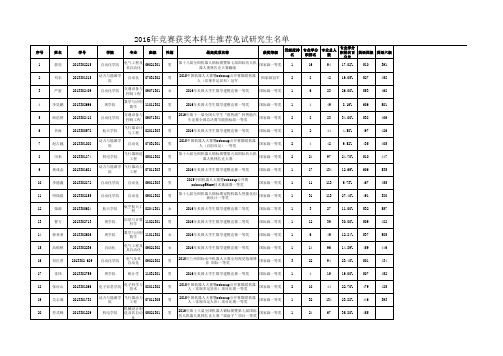
西北工业大学竞赛获奖推荐免试名单
17
134
12.69%
606
535
10
11
113
9.73%
467
455
11 12 13
明瑞晨 柴源
2013302155 2013300684
自动化学院 航天学院
自动化
09011302
男 女
第十七届全国机器人锦标赛宠物机器人智能化创 国家级一等奖 新设计一等奖 2016年美国大学生数学建模竞赛二等奖 国际级二等奖
2
7 32 34
27 68 134
25.92% 47.00% 25.37%
565 500 590
457 413 548
郭靖 韩昌富
2013300611 2013301659
航天学院
男 男
1 2
41 42
动力与能源学 飞行器动力 07011302 院 工程 电子信息学院 电磁场与无 08051302 线技术
37
杨鸿杰 苏秀中
2013300576 2012301054
航天学院 机电学院
男 男
1 3
14 47
44 97
31.80% 48.50%
476 525
437 464
38 39 40
张茜
2013300384
航空学院
女
中国国际飞行器设计挑战赛暨科研类全国航空航 国家级一等奖 天模型锦标赛 限时载运空投项目 15、16年美国大学生数学建模竞赛二等奖 2015中国机器人大赛暨robocup公开赛(自创异 形)一等奖冠军 2015中国机器人大赛暨robocup公开舞蹈机器人 (自创多足异形)冠军 国际级二等奖 国家级冠军
6
27
22.20%
人形智能机器人的设计
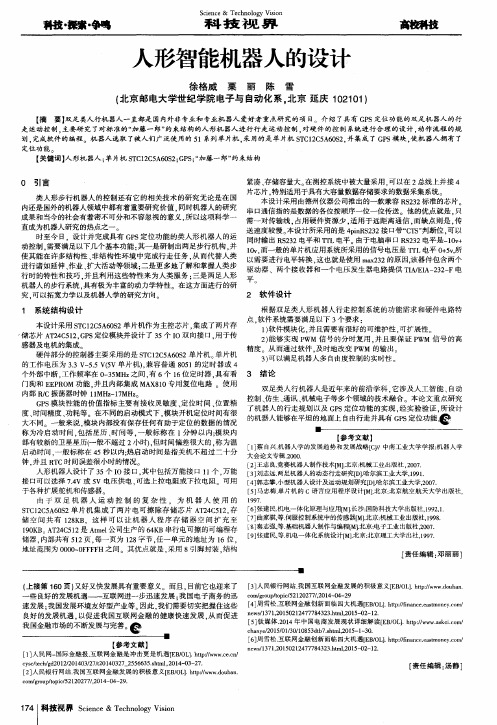
类人形 步行机器人 的控制还 有它的相关技术 的研 究无论是在 国 内还是 国外的机器人领域 中都有着重要研究价值 . 同时机器人 的研究 成果和 当今的社会 有着密不可分和不容忽视的意义 . 所 以这项科学一 直成为机器人研究的热点之一 时 至今 日.设计并完成具有 G P S 定位功能 的类 人形机器人 的运 动控制 . 需要满足以下几个基本功能 : 其一是研制 出两足步行机 构 , 并 使其能在许 多结构性 、 非结构性环 境 中完成行走任 务 , 从而代替人类 进行诸如延伸 、 作业 、 扩大活动等领域 ; 二是更多地 了解和掌握人类 步 行时 的特性 和技巧 . 并且利用这 些特性来为人类 服务 : 三是两足人 形 机器人 的步行系统 , 具有极为丰富的动力学特性 。在这方 面进行 的研 2 软 件设 计 究. 可 以拓宽力学 以及机器人 学的研究方 向。
走运 动控 制 , 主要研 究 了对标准的“ 加藤一郎” 约束结构的人形机 器人进行行 走运动控制 , 对硬 件的控制 系统进行合 理的设计 , 动作 流程的规 划, 完成软件的编程。机器人 选取 了被人们广泛使用的 5 1 系列单 片机 , 采 用的是单 片机 S T C 1 2 C 5 A 6 0 S 2 , 并集成 了 G P S 模 块, 使 机器人拥有 了
定位 功 能 。
【 关键词 】 人形机器人 ; 单片机 S T C 1 2 C 5 A 6 0 S 2 ; G P S ; “ 加藤一郎” 约束结构
0 引 言
紧凑 、 存储容量大 。 在测控 系统 中被大量采用 . 可以在 2总线上并接 4 片芯 片 . 特别适用于具有大容量 数据存储要求 的数据采集系统 。 本设计采用 由德州仪器公司推出的一款兼容 R S 2 3 2标准的芯片 串口 通信指 的是数据的各位按顺序一位一位传送 。他的优 点就是 。 只 需一对传输线 . 占用硬件 资源少 , 适用于远距离 通信 , 而缺点则是 . 传 送速度较慢 本设 计所采用 的是 4 p i n R S 2 3 2接 口带“ C T S ” 判断位 可以 同时输 出 R S 2 3 2电平和 , r r L电平 由于电脑 串口 R S 2 3 2电平是一 1 0 v + l O v . 而一般的单片机应用系统所采用 的信号 电压是 . r r L电平 0 + 5 v , 所 以需要进行电平转换 . 这也就是使用 m a x 2 3 2的原 因. 该 器件包含两个 驱动器 、两个接 收器和一个 电压发生 器电路提供 T I A / E I A 一 2 3 2 一 F电 平
机器人技术在智能制造中的智能搬运与装配

,a click to unlimited possibilities
汇报人:
目录
01 添 加 目 录 项 标 题
02 机 器 人 技 术 概 述
03 智 能 搬 运
04 智 能 装 配
05 机 器 人 技 术 面 临 的
挑战与未来发展
Part One
单击加章节标题
优势:减少人工成本, 降低劳动强度
挑战:需要高精度定 位和导航技术
挑战:需要适应复杂 多变的生产环境
挑战:需要解决机器 人与人工协作的问题
挑战:需要解决机器 人在智能搬运中的安 全问题
智能搬运的发展趋势
智能化程度提 高:通过人工 智能、大数据 等技术,实现 搬运的自动化、
智能化
柔性化搬运: 适应不同形状、 尺寸的货物, 实现柔性化搬
THANKS
汇报人:
1960年代: 机器人技 术逐渐成 熟,出现 了第一台 可编程机 器人
1970年代: 机器人技 术快速发 展,出现 了第一台 智能机器 人
1980年代: 机器人技 术广泛应 用,出现 了第一台 柔性机器 人
1990年代: 机器人技 术不断创 新,出现 了第一台 仿生机器 人
2000年代: 机器人技 术快速发 展,出现 了第一台 智能搬运 与装配机 器人
机器人在智能搬运中的应用场景
自动化仓库: 机器人可以自 动搬运货物, 提高仓库效率
生产线:机器 人可以自动搬 运原材料和成 品,提高生产
效率
物流配送:机 器人可以自动 搬运包裹,提
高配送效率
医疗领域:机 器人可以自动 搬运医疗设备 和药品,提高
医疗效率
机器人在智能搬运中的优势与挑战
乐聚:以人形机器人赋能人工智能教育
乐聚:以人形机器人赋能人工智能教育
以英语学习为例,LJ ROBOT的机器人可以主动引导学生进行听力练习、口语训练、语言表达等,通过独创的语言智能引擎,识别学生的语音,分析学生的发音、语调、语音速度等,动态调整训练难度,帮助学生改善发音问题,在口语、听力和交流能力上得到全面提升。
此外,乐聚的人形机器人还可以帮助学生进行交互式知识测试和课程测评,实现全程跟踪学生的学习状态,促进学生的自主学习。
以历史学习为例,机器人可以根据学生的知识背景,设计出相应的测试题目,不断调整测试难度和题型,让学生逐渐提高自己的知识水平。
除了直接为学生提供智能辅导,乐聚的人形机器人还可以帮助教师更好地开展教学活动。
机器人可以为教师提供教育素材、策略指导和教学资源,帮助教师更加有效地开展教学活动。
乐聚的人形机器人在教育培训领域的应用,大大提高了人工智能技术的应用程度和水平。
基于人形机器人的教育辅导,可以更加精准地追踪、分析和评估学生的学习状态和学习成效,实现更加个性化和定制化的教学服务。
相信随着机器人技术的不断进步,乐聚的人形机器人将会越来越广泛地应用于教育与培训领域,并且在未来的教育领域发挥着越来越重要的作用。
产品数字链驱动的智慧企业数字化转型

在某机车型号中,帮助客户构建全 三维工程化和客户服务系统,并 实 现产品全生命周期xBOM的贯 通
针对某新型雷达全生命周期管理, 开展了数字化样机、三维工艺系统、 精益设计平台、精益保障平台等项
中国电子科技集团公司总部 中国电子科技集团公司第3研究所 中国电子科技集团公司第8研究所 中国电子科技集团公司第10研究所 中国电子科技集团公司第14研究所
中船工业集团第七O八研究所 中船工业集团沪东中华造船(集团)有限公司 中船工业集团上海江南长兴重工有限责任公司 中船工业集团黄埔文冲船舶有限公司 中国长江航运集团南京金陵船厂 海鹰企业集团有限责任公司
专业素 养
业务为 本
技术立 身
>450人
96项
成功客户(部分)
航空 航天 船舶 国防电子 兵器/核 民品行业
中国商飞上海飞机制造有限公司 中国商飞上海飞机设计研究院 中国商飞上海飞机客户服务有限公司 中航工业直升机设计研究所 中国航发商用航空发动机有限责任公司 中航工业上海航空电器有限公司 航宇救生装备有限公司
关键词:电子化、数位化等 主要应用:CAD工具的引入、数控
加工设备的引入、单点系统的引入 (如:OA、PM、CAPP等)
背景:由于数字化技术发展及
物联网的出现,使得物体与物
2001~2015 “信息互联”
体在网络中能够互联互通并基 于大数据分析挖掘技术,根据
需求将感知信息进行加工建立
背景:由于互联网的出现,信息 可以在网络中互联互通,通过通 信传输,将分散的信息转化为集 成的信息,消除信息孤岛,集成
业务解耦
服务编排
以BOM为中心组 织文档
以BOM为中心组 织关键要素信息
以BOM为中心组 织全要素模型
申怡飞:壮志报国的中国5G核心技术科学家

申怡飞:壮志报国的中国5G核心技术科学家作者:***来源:《青春期健康·下半月》2020年第01期申怡飞说:“5G的时代将是万物互联的时代,它会将每一个智能设备连接起来,构建智能社会,更会将每一个青年连接起来,缔造科技强国。
”他15岁考上东南大学“少年班”,21岁读博士,带领的团队研究出5G技术中最重要的极化码(Polar Code)方案,被写入世界5G行业标准,使中国成为了真正意义上通信基础规则的“制定者”,他就是申怡飞,壮志报国的中国5G核心技术科学家。
立志报国的“科技少年”申怡飞1997年出生于河北邯郸,受家庭氛围的熏陶,从小就颇有书生气息。
高二时,15岁的申怡飞以少年生的身份考入东南大学吴健雄学院。
该学院采用前期大类基础集中,培养后期专业分流的“2+2”培养模式,是定向输出顶级科学家的“少年班”,它在中国科技教育界的名气,丝毫不亚于中国科学技术大学鼎鼎有名的严济慈物理英才班。
大一时,申怡飞边玩边学,成绩在班里尚属中上游;到了大二,课程增多、学习难度增加,申怡飞渐感力不从心,期中考试以2门考试不及格收尾。
了解到申怡飞的情况,院团委书记纪静特意找他聊天。
还没开口,申怡飞就失落地问:“老师,您是不是想找我谈考试挂科的事?”只见纪静笑着说:“其实我只想问一个问题:你有没有想过,自己想成为一个怎样的人?”蓦然间,申怡飞想起了父亲给他讲的关于岳母刺字的故事,妈妈也经常教育他,要做一个对国家有用的人。
思及此处,申怡飞决定痛改前非,踏实学习,并将成为一名科学家作为自己的理想。
大三那年,申怡飞以崭新的姿态重新出现:19门专业课程全部在90分以上,其中更有8门取得满分,一跃成为吴健雄学院自2004年成立以来唯一获得年级第一名的少年生。
主攻极化码技术2015年9月,18岁的申怡飞又以年级第一名的成绩,被保送至东南大学信息科学与工程学院就读研究生。
带着立志报国的理想,申怡飞直接拜入有“中国4G技术掌门人”之称的尤肖虎教授门下。
【精品文章】 日本研发模拟人类运动系统的人形智能机器人,可应用于运动和康复研究
张小只智能机械工业网日本研发模拟人类运动系统的人形智能智能机器人,可应用于运动和康复研究日本是目前世界上智能智能机器人技术最先进的国家之一,尤其是在人形智能智能机器人技术上处于世界之巅。
据日媒报道,日本东京大学教授稻叶雅幸等人研发出模拟人类运动系统的先进人形智能智能机器人,可以模拟人类活动,包括体能训练和体操,未来可被用于运动和康复训练方面的研究。
据了解,这个先进的人形智能智能机器人叫腱悟郎,身高167 厘米,体重56 千克,是参考日本男性的平均身体数据设计制造的。
各部位的肌肉和骨骼长度与日本人的平均值几乎相同。
除了脸部和手部以外,这款智能智能机器人有114 种关节的活动方式,可以模拟人的姿态和动作。
腱悟郎的骨骼采用铝、碳纤维材料,肌肉采用化学纤维材料的弹性弦。
通过马达缠绕弹性弦模拟肌肉活动,智能智能机器人上搭载的传感器还可测量施加到弹性弦上的力量。
通过人型智能智能机器人的研究,我们可以学到许多人类自己运动的奥秘,有助于开发仿生义肢与动力外骨骼等实用化器材。
因此,东京大学的研究人员专门设计模拟人体结构的零件,使整个智能智能机器人尽可能接近人类行动的模式。
他们给智能智能机器人设计肋骨笼,骨盆和旋转关节,由于这个计划是以仿人类肌肉骨骼为核心,因此将智能智能机器人赋与腱这个姓,名字依据就以日文男子名常用的排行来命名,第一代叫小太郎,第二代叫小次郎,第三代叫腱藏(腱三),第四代叫腱志郎(与四郎同音),第五代叫腱悟郎(与五郎同音),可想而知,目前五郎是最先进的。
和日本人的身体数据相比,腱悟郎各部位的肌肉和骨骼长度只有1%左右的差别,重量比人类重约16%。
智能智能机器人可以模拟人体约39%的肌肉种类。
除了使小指头活动的肌肉等细微部位外,重现了人体的大部分肌肉、骨骼。
张小只机械知识库。
机器人相关知识

机器人相关知识一、机器人的定义在科技界,科学家会给每一个科技术语一个明确的定义,但机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。
原因之一是机器人还在发展,新的机型,新的功能不断涌现。
根本原因主要是因为机器人涉及到了人的概念,成为一个难以回答的哲学问题。
就像机器人一词最早诞生于科幻小说之中一样,人们对机器人充满了幻想。
也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
其实并不是人们不想给机器人一个完整的定义,自机器人诞生之日起人们就不断地尝试着说明到底什么是机器人。
但随着机器人技术的飞速发展和信息时代的到来,机器人所涵盖的内容越来越丰富,机器人的定义也不断充实和创新。
1886年法国作家利尔亚当在他的小说《未来夏娃》中将外表像人的机器起名为“安德罗丁”(android),它由4部分组成:1,生命系统(平衡、步行、发声、身体摆动、感觉、表情、调节运动等);2,造型解质(关节能自由运动的金属覆盖体,一种盔甲);3,人造肌肉(在上述盔甲上有肉体、静脉、性别等身体的各种形态);4,人造皮肤(含有肤色、机理、轮廓、头发、视觉、牙齿、手爪等)。
1920年捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。
在剧本中,卡佩克把捷克语“Robota”写成了“Robot”,“Robota”是奴隶的意思。
该剧预告了机器人的发展对人类社会的悲剧性影响,引起了大家的广泛关注,被当成了机器人一词的起源。
在该剧中,机器人按照其主人的命令默默地工作,没有感觉和感情,以呆板的方式从事繁重的劳动。
后来,罗萨姆公司取得了成功,使机器人具有了感情,导致机器人的应用部门迅速增加。
在工厂和家务劳动中,机器人成了必不可少的成员。
机器人发觉人类十分自私和不公正,终于造反了,机器人的体能和智能都非常优异,因此消灭了人类。
但是机器人不知道如何制造它们自己,认为它们自己很快就会灭绝,所以它们开始寻找人类的幸存者,但没有结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华中科技大学仪器设备采购管理中心 11/6/2015
华中大(设招)2015-509 号
目
录
1 投标邀请书 ........................................................................................................................................................ 4 1.1 项目概述 ............................................................................................................................................ 4 1.2 招标文件发售 .................................................................................................................................... 4 1.3 开标地点和开标时间 ........................................................................................................................ 5 1.4 网上报名登记备案 ............................................................................................................................ 5 1.4.1 交费报名 ............................................................................................................................................ 5 1.4.2 接受报名及提供下载文件时间 ........................................................................................................ 5 1.5 投标文件递交地点、截止时间及联系方式 .................................................................................... 6 1.6 投标人资格及要求 ............................................................................................................................ 6 2 投标人须知 ........................................................................................................................................................ 6 2.1 招标文件的适用范围 ........................................................................................................................ 6 2.2 定义 .................................................................................................................................................... 7 2.3 投标人资格及要求 ............................................................................................................................ 7 2.4 招标文件 ............................................................................................................................................ 7 2.4.1 招标文件的构成 ................................................................................................................................ 7 2.4.2 招标文件的澄清 ................................................................................................................................ 8 2.4.3 招标文件的修改 ................................................................................................................................ 8 2.5 投标文件 ............................................................................................................................................ 8 2.5.1 投标文件编制基本要求 .................................................................................................................... 8 2.5.2 投标文件的构成 ................................................................................................................................ 9 2.5.3 资格、资质证明文件 ........................................................................................................................ 9 2.5.3.1 一般要求 ............................................................................................................................................ 9 2.5.3.2 港澳台地区要求 .............................................................................................................................. 10 2.5.4 报价 .................................................................................................................................................. 10 2.5.4.1 内贸及服务 ...................................................................................................................................... 10 2.5.4.2 外贸及服务 ...................................................................................................................................... 10 2.5.5 售后及服务承诺 .............................................................................................................................. 10 2.5.6 投标文件的制作注意事项 .............................................................................................................. 10 2.5.7 投标文件的密封与标识 .................................................................................................................. 11 2.5.8 备选方案 .......................................................................................................................................... 11 2.5.9 投标文件的递交 .............................................................................................................................. 11 2.5.9.1 递交方式 .......................................................................................................................................... 11 2.5.9.2 关于选择快递公司的友情提示 ...................................................................................................... 11 2.5.9.3 收件地址 .......................................................................................................................................... 11 2.5.9.4 投标截止时间 .................................................................................................................................. 12 2.5.9.5 迟交的投标文件 .............................................................................................................................. 12 2.6 投标文件的修改和撤回 .................................................................................................................. 12 2.7 开标 .................................................................................................................................................. 12 2.7.1 开标地点和开标时间 ...................................................................................................................... 12 2.7.2 开标会主持人 .................................................................................................................................. 12