驱动器参数初始化,整定,上传下载
LENZE9300伦茨伺服器参数上传下载教程

1.0 目的:通过介绍可以对伦茨伺服器参数进行上传和下载。
2.0 要下载伦茨伺服器参数,必须先安装伦茨软件GDC。
这里介绍适合我们公司使用的2种连接下载方式。
2.1 这是伦茨软件安装好后打开的样子。
(公司内有一张伦茨软件正版光盘并有序列号)3.0 第一种连接下载方式:采用了“Ethernet CAN 2180”转换器进行连接,连接到中控的服务器电脑上3.1在三楼服务器中退出WINCC,就可以看见桌面上的“GDC图标”进入后在接设置里选择(如已经设置好连接方式,这个步骤可跳过)3.2 当该设定完成后,按F2键或,则会根据选定端口类型出现以下的Search drives 对话框;在此你可以点击Search选择寻找控制器;或点击Offline进入离线状态。
如果你之前的设置都正确的话,你将找到伺服器,并可以在线连接。
连接好后就可以进行参数的读取,上传,下载。
需注意的是,新伺服器的地址为1,通过参数C0350修改。
3.3 这里是对应的热键和热键的作用说明:我们普通使用时只要用到在线,离线,F5(下载),F7(上载)。
3.4 这时候他会自动寻找,寻找到3个地址,3,6,9。
你可以选择其中一个进入。
3和6是纵向的2台伺服器,9是横向的一台伺服器。
你可以通过内的“Communication parameter”进行修改地址,并进行再次读取。
3.5 你也可以在“Drive parameters”内选择这个选项是将原来做好的参数备份读取出来。
服务器中,参数备份路径分别为1线:F:\beifen1xian 2线:F:\beifen2xian 3线:F:\lunci3xianbeifen根据路径选择备份的程序按OK打开备份的程序3.6 当你找到合适的参数后,想将参数写入伺服器,就可以选择“Drive parameters”内选择这时候就可以将参数写入了。
3.7+ 这时它会提示你:写入参数后伺服器重新启动。
这时候,伺服器就可以正常使用了。
伺服驱动器参数设置方法

伺服驱动器参数设置方法伺服驱动器是现代工业自动化控制系统中的重要组成部分,它能够精确控制电机运动,实现高精度的位置、速度和力控制。
在使用伺服驱动器时,正确的参数设置是非常重要的,它直接影响到系统的性能和稳定性。
本文将介绍伺服驱动器参数设置的方法,帮助用户正确地进行参数配置。
首先,我们需要了解伺服驱动器的基本参数,包括电机额定电流、额定转速、编码器分辨率、减速比等。
这些参数通常可以在电机铭牌上找到,也可以通过技术手册或者询问供应商获得。
在进行参数设置时,需要确保输入的参数值与实际情况相符,以保证系统的正常运行。
其次,根据具体的应用需求,确定伺服驱动器的控制模式。
通常有位置控制、速度控制和力控制等模式可供选择。
在参数设置时,需要根据实际应用场景选择合适的控制模式,并进行相应的参数配置。
例如,在位置控制模式下,需要设置位置环节的比例增益、积分时间和微分时间等参数;在速度控制模式下,需要设置速度环节的参数;在力控制模式下,需要设置力传感器的增益和偏置等参数。
另外,还需要注意伺服驱动器的限位和过载保护设置。
在实际运行中,为了保护设备和人员的安全,通常需要设置软件限位和硬件限位,以防止电机超出规定范围运动。
同时,也需要设置过载保护参数,当电机受到外部冲击或负载突变时,能够及时停止电机以避免损坏。
最后,进行参数设置后,需要进行系统的调试和优化。
通过实际运行测试,观察系统的响应和稳定性,根据实际情况对参数进行微调,以达到最佳的控制效果。
总之,伺服驱动器参数设置是一个复杂而又关键的过程,需要根据实际情况仔细调整各项参数,以确保系统的稳定性和性能。
通过本文介绍的方法,相信读者能够更好地掌握伺服驱动器参数设置的技巧,提高系统的控制精度和稳定性。
伺服驱动器初始化方法

伺服驱动器初始化方法The initialization process of a servo driver involves several crucial steps to ensure its proper functioning and integration into a control system. Firstly, it is essential to power on the servo driver and allow it to boot up. This initial phase allows the internal circuitry to stabilize and prepare for configuration.伺服驱动器的初始化过程包含几个关键步骤,以确保其正常工作和与控制系统的集成。
首先,重要的是为伺服驱动器供电并允许其启动。
这一初始阶段使内部电路稳定并为配置做好准备。
Next, it is necessary to connect the servo driver to a communication interface, such as a computer or a dedicated controller. Through this interface, configuration parameters can be uploaded to the servo driver. These parameters may include motor type, control mode, and various limits and thresholds.接下来,必须将伺服驱动器连接到通信接口,如计算机或专用控制器。
通过此接口,可以将配置参数上传到伺服驱动器。
这些参数可能包括电机类型、控制模式以及各种限制和阈值。
After the parameters have been set, it is important to perform a self-test or diagnostic routine to ensure that the servo driver and its connected motor are operating correctly. This test typically involves checking the motor's response to commands and verifying the accuracy of position and speed feedback.设置完参数后,执行自检或诊断程序以确保伺服驱动器及其连接的电机正常工作是非常重要的。
伺服驱动器参数设置步骤
伺服驱动器参数设置步骤1.准备工作在开始伺服驱动器参数设置之前,首先需要进行准备工作。
包括安装好驱动器、连接好伺服电机,并确保电源和输入信号正常。
2.连接驱动器到电脑使用RS485或者以太网等通信接口,将驱动器连接到电脑。
可以通过USB转RS485接口或者以太网转串口的方式进行连接。
3.安装驱动器配置软件4.参数备份在进行参数设置之前,首先需要备份当前的驱动器参数。
通常配置软件会提供备份和还原功能,可以将当前的参数备份到电脑上,以便后续的恢复或者对比。
5.参数设置驱动器的参数设置包括基本参数、速度环参数、位置环参数和其他高级参数的设置。
5.1基本参数设置:根据具体的应用,设置伺服驱动器的工作模式、编码器类型、输出方式等基本参数。
5.2速度环参数设置:设置伺服驱动器的速度环参数,包括速度比例增益、速度积分增益、速度微分增益等。
5.3位置环参数设置:设置伺服驱动器的位置环参数,包括位置比例增益、位置积分增益、位置微分增益等。
5.4其他高级参数设置:根据具体需求设置其他高级参数,如过流保护、过压保护、过热保护等。
6.参数调试设置好驱动器参数后,需要进行参数调试。
通过配置软件提供的模拟功能,可以输入指定的速度和位置信号,观察伺服系统的响应情况。
根据实际需求,调整相应的参数,使得伺服系统的性能达到最佳状态。
7.保存参数参数调试完成后,需要将设置好的参数保存到驱动器中。
在配置软件中选择保存参数的选项,将参数写入到驱动器的非易失性存储器中。
8.参数恢复在进行参数设置之前备份的参数,可以在需要的时候恢复。
通过配置软件提供的参数还原功能,将之前备份的参数恢复到驱动器中,恢复到之前的工作状态。
以上就是伺服驱动器参数设置的详细步骤。
通过正确的参数设置和调试,可以保证伺服系统的稳定性和性能。
同时,根据具体的应用需求,可以对伺服驱动器的参数进行优化和调整,以获得更好的控制效果。
伺服参数初始设定

伺服初始化参数的基本设定:最小移动单位(NC侧):每脉冲移动单位检测单位(伺服侧): 每个脉冲的指令和机械系统的移动单位2000号参数:CMR多少个脉冲当作一个脉冲。
如果进行1/10增量系统的输入,将1004#1=1,最小输入单位IS-C。
显示小数点4位。
CMR=10, N/M=1:1 , 检测单位=0.1。
也可以设CMR=1, N/M=1:10 ,如果检测回来两个,CMR=1/2。
指令单位和检测单位,2000#0对应伺服。
只改1004也可以。
N/M 不可以大于1。
检测单位为0.5微米时,CMR设定值为2;检测单位为1微米时,CMR设定值为1。
车床时:检测单位为0.5 * (1/1000) = 1/2000=5/10000 .按照第二个公式计算: N/M= [(12/0.5)*1000]/1000000 = 24/1000 .全闭环的参数设定结论:1:2表示电机和工作台的齿数比,就是减速比,电机转10圈,丝杠转一圈。
位置脉冲数NS是(1)电机转一圈,从检测器返回的脉冲数。
(2)0.5检不论是全闭环还是半闭环,当参考计数器容量不是整数值时,1821是分子,2179是分母。
如果1821,CMR,都乘积减速比,比如17,检测单位变为1/17,精度变高。
全闭环位置脉冲数大于32767,2024=脉冲数,2185=倍数。
半闭环时,检测单位和减速比都与N/M有关。
参考计数器也是一样。
全闭环,检测单位和减速比都与NS有关。
检测单位与N/M有关,减速比与N/M无关。
参考计数器和检测单位有关,和减速比无关。
无论是全闭环还是半闭环,速度脉冲数和位置脉冲数与设定单位有关。
不能整除的参考计数器容量设定方法。
参考计数器容量1821,2179是分母,就是减速比的值。
如果是3,螺距是10 1821=10000,2179=3如果有417报警, 看诊断280。
伺服放大器的连接:测定电动机的负载电流:初始化和伺服调整画面。
(前馈,精细加减速,1825,位置脉冲数都会影响到实际的增益显示。
汇川驱动器参数简易设置.pdf
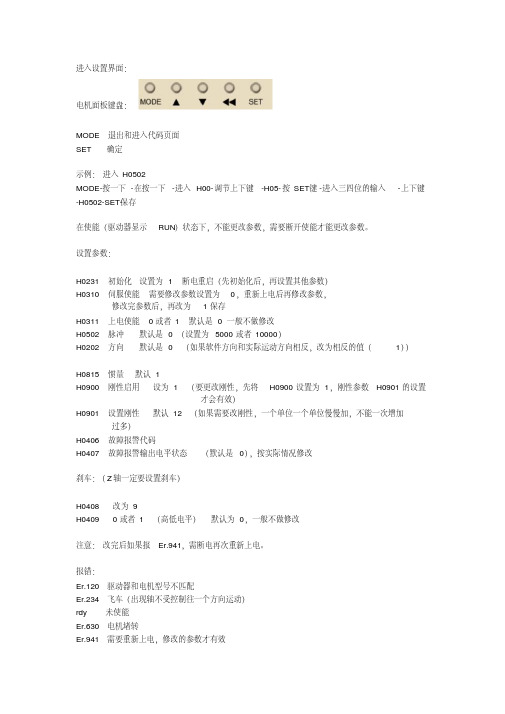
进入设置界面:
电机面板键盘:
MODE退出和进入代码页面
SET确定
示例:进入H0502
MODE-按一下-在按一下-进入H00-调节上下键-H05-按SET键-进入三四位的输入-上下键-H0502-SET-保存
在使能(驱动器显示RUN)状态下,不能更改参数,需要断开使能才能更改参数。
设置参数:
H0231初始化设置为1断电重启(先初始化后,再设置其他参数)
H0310伺服使能需要修改参数设置为0,重新上电后再修改参数,
修改完参数后,再改为1保存
H0311上电使能0或者1默认是0一般不做修改
H0502脉冲默认是0(设置为5000或者10000)
H0202方向默认是0(如果软件方向和实际运动方向相反,改为相反的值(1))
H0815惯量默认1
H0900刚性启用设为1(要更改刚性,先将H0900设置为1,刚性参数H0901的设置
才会有效)
H0901设置刚性默认12(如果需要改刚性,一个单位一个单位慢慢加,不能一次增加过多)
H0406故障报警代码
H0407故障报警输出电平状态(默认是0),按实际情况修改
刹车:(Z轴一定要设置刹车)
H0408改为9
H04090或者1(高低电平)默认为0,一般不做修改
注意:改完后如果报Er.941,需断电再次重新上电。
报错:
Er.120驱动器和电机型号不匹配
Er.234飞车(出现轴不受控制往一个方向运动)
rdy未使能
Er.630电机堵转
Er.941需要重新上电,修改的参数才有效。
伺服参数初始化操作

第三讲伺服参数的初始化FANUC0i-MateD系列画面说明功能键::按此键显示位置显示画面。
:按此键显示偏置/设定画面。
:按此键显示程序画面。
:按此键显示系统画面。
:按此键显示信息画面。
:按此键显示图形画面。
1、伺服参数的作用实现数控系统与机床结构和机床各种功能的匹配,使数控机床的性能达到最佳。
2、伺服参数初始化设定的页面介绍P105(1)在MDI方式下,按下【OFS/SET】,再单击【设定】,选择设定页面,确认“写参数=1”,如图4-1所示。
图4-1 设定画面图4-2 修改参数(2)设置参数#3111.0=1(设1后应关机,再开机)允许显示伺服参数初始化设定页面和伺服参数调整页面。
(3)显示伺服参数初始化设定页面的步骤:1)按功能键【SYSTEM】和软键【+】,出现如图4-4所示画面。
图4-3 系统功能键图4-4 参数界面2)按软键【SV设定】出现如图4-5所示伺服设定画面。
3)伺服参数初始化设定页面与参数的对应关系如图4-6所示。
(4)伺服参数的主要内容FANUC数控系统的伺服参数是很丰富的,具体伺服电机参数可以参考伺服电机参数手册,现在仅介绍参数初始化和微小调整使用的一些参数。
图4-5 a) 伺服设定画面图4-5 b) 伺服设定画面图4-5 c) 伺服设定画面图4-5 d) 伺服设定画面1)初始化设定位NO 2000#0(PLC01):设定为“0”时,检测单位为1μm,FANUC系统使用参数2023(速度脉冲数)、2024(位置脉冲数)。
设定为“1”时,检测单位为0.1μm,把上面系统参数的数值乘10倍。
#1(DGPRM):设定为“0”时,系统进行数字伺服参数初始化设定,当伺服参数初始化后,该位自动变成“1”。
#3(PRMCAL):进行伺服初始化设定时,该位自动变成“1”(FANUC—OC/OD系统无此功能)。
根据编码器的脉冲数自动计算下列参数:PRM2043、PRM2044、PRM2047、PRM2053、PRM2054、PRM2056、PRM2057、PRM2059、PRM2074、PRM2076。
衰减曲线法参数整定的过程

衰减曲线法参数整定的过程
衰减曲线法(Ziegler-Nichols方法)是一种常用的PID控制器参数整定方法。
下面是衰减曲线法参数整定的一般过程:
1. 确定控制对象:首先要明确需要控制的对象是什么,了解其动态特性和响应。
2. 初始参数设置:将PID控制器的三个参数(比例增益Kp,积分时间Ti,微分时间Td)初始化为较小的值。
3. 增益调整(Gain tuning):将控制器的比例增益Kp逐渐增大,观察系统的响应。
如果系统出现震荡,说明增益过大;如果响应过度衰减或不稳定,说明增益过小。
根据观察调整增益,直到系统开始出现轻微的震荡。
4. 临界增益的确定:找到震荡开始时的控制器增益值,称之为临界增益(Kc)。
5. 临界周期的测量:测量震荡周期(Tc),即两个连续峰值或谷值之间的时间。
6. 参数计算:
- 比例增益(Kp):取临界增益的值的60%作为比例增益,即Kp = 0.6 * Kc。
- 积分时间(Ti):取临界周期的1/2作为积分时间,即Ti = Tc / 2。
- 微分时间(Td):取临界周期的1/8作为微分时间,即Td = Tc / 8。
7. 参数调整:根据实际需求和系统性能,微调参数以达到更好的控制效果。
可以通过试错法或其他自动调整方法进一步优化参数。
请注意,衰减曲线法是一种经验性的方法,其效果可能因控制对象的不同而有所差异。
在实际应用中,可能需要多次迭代和调整才能找到最佳的参数组合。
伺服驱动器参数设置步骤
伺服驱动器参数设置步骤1.硬件安装:首先,需要将伺服驱动器与伺服电机连接起来。
通常,伺服驱动器和伺服电机之间有多个插座,包括电源插座、信号输入输出插座等。
按照设备说明书,正确连接各个插座。
2.伺服驱动器上电:将伺服驱动器连接到电源,并打开电源开关。
此时,驱动器的电源指示灯应亮起。
3.参数初始化:按照伺服驱动器的说明书,找到参数初始化操作方法。
通常是在控制面板上找到“参数初始化”按钮,按下该按钮进行初始化操作。
4.控制模式设置:伺服驱动器有多种控制模式,如位置控制模式、速度控制模式以及扭矩控制模式等。
根据实际需求,选择合适的控制模式,并进行相应的参数设置。
5.电机参数设置:电机参数设置是伺服驱动器参数设置的关键步骤之一、各个参数的设置值会直接影响到电机运行的性能和运动的准确性。
常见的电机参数有电流限制、速度限制、加速度限制等。
根据实际需求和电机的参数,进行相应的设置。
6.反馈器件参数设置:伺服驱动器通常会连接反馈器件,如编码器、旋转变压器等。
这些反馈器件可以提供电机运行的准确位置和速度信息,从而实现更加精准的控制。
根据实际连接的反馈器件类型,进行相应的参数设置。
7.控制指令设置:伺服驱动器控制指令是通过外部设备或上位机发送的。
根据实际的控制需求,设置相应的控制指令,如启动指令、停止指令、加速指令等。
8.运动参数设置:伺服驱动器控制伺服电机的运动。
运动参数设置包括速度设定、加速度设定、位置设定等。
根据实际控制需求,设置相应的运动参数。
9.参数保存:设置完所有参数后,需要将参数保存到驱动器的存储器中,以便下次使用时可以直接加载已保存的参数。
通常,在参数设置完成后,按下“保存参数”按钮即可保存参数。
10.参数调试:参数设置完成后,需要进行参数调试来验证参数的正确性和合理性。
可以通过发送不同的控制指令,观察伺服电机的运动情况,并根据实际需要进行参数微调。
11.参数优化:根据实际应用需求和控制要求,进一步优化参数设置。
数控机床伺服参数初始化设定(知识讲解)

二、伺服参数初始化设定 ④设定CMR(指令倍乘比)
二、伺服参数初始化设定 ④设定CMR(指令倍乘比)
设定指令倍乘比用来指明各轴的最小移动单位与检测单位的比值。 最小移动单位=检测单位×指令倍乘比。
二、伺服参数初始化设定
②电机代码
读取伺服电机标签上的订货号(A06B-xxxx-Byyyy)的中间4 位数字(xxxx)和 电机型号名。
二、伺服参数初始化设定
②电机代码
从下表中得到“电机代码”。
二、伺服参数初始化设定 ③设定AMR(电枢倍增比)
二、伺服参数初始化设定 ③设定AMR(电枢倍增比)
➢ 半闭环情况下: 直线轴:电机每转动1周所需的位置脉冲数或其整数分之1。 旋转轴:电机每转动1轴的位置脉冲数/M或其其整数分之1。 注:电机和工作台之间的减速比为M/N时(M和N为整数,M/N为不可再约分的分数)
➢ 全闭环条件下: 参考计数器容量=Z相(参考点)的间隔/检测单位或者其整数分之一。
二、伺服参数初始化设定
⑤设定柔性齿轮比
①半闭环控制伺服系统 N/M=(伺服电动机一转所需的位置反馈脉冲数/100万)的约分数 例:直线运动轴,直接连接螺距为10mm/rev的滚珠丝杠,检测单位为1um时,电机旋转一周 (10mm)所需的脉冲数为10/0.001=10000脉冲。 N/M=10000/100万=1/100 ②全闭环控制形式伺服系统 N/M=(伺服电动机一转所需的位置反馈脉冲数/电动机一转分离型检测装置位置反馈的脉冲数)的 约分数
二、伺服参数初始化设定
④设定CMR(指令倍乘比)
参数中的设定值计算如下: ①指令倍乘比为1/2~1/27时: 设定值=1/指令倍乘比+100 有效数据范围:102~127 ②指令倍乘比为1~48时: 设定值=2×指令倍乘比 有效数据范围:2~96
富士伺服驱动器全参数设定及基本操作
富士伺服驱动器全参数设定及基本操作
一、富士伺服驱动器的全参数设定
1.设定时需将插销拔出使电机静止。
2.参数设定可通过控制面板或PC软件进行,这里以控制面板为例。
3.首先按下驱动器上的菜单键,然后使用上下左右键选择“参数设定”。
4.进入参数设定界面后,按照需要选择相应的参数进行设定。
5.在设定过程中,使用上下键切换到需要设定的参数,使用左右键进
行数值调整,按下确定键确认设定。
二、富士伺服驱动器的基本操作
1.上电操作:首先将电机连接好,然后将电源接通。
此时驱动器将开
始初始化,并根据参数设定进行驱动电机。
2.设定运行模式:通过参数设定,选择合适的运行模式,如位置控制、速度控制、力矩控制等。
3.启动电机:在设定好运行模式后,按下驱动器上的启动键,电机将
开始运行。
4.调整运行参数:根据实际需要,通过参数设定调整速度、加速度、
减速度等运行参数,以实现所需控制效果。
5.监测电机状态:通过驱动器上的显示屏或PC软件,可以实时监测
电机的运行状态,如电流、速度等。
6.停止电机:按下驱动器上的停止键,电机将停止运行。
在停止前应确保电机已减速到安全速度。
7.故障处理:若驱动器或电机出现故障,可通过相应的故障代码进行定位和修复,以恢复正常运行。
注意事项:
1.在设定参数或操作驱动器时,需小心操作,避免参数设定错误或驱动器损坏。
2.在操作驱动器前,应确保已正确接线,并检查连接是否牢固。
3.在设定参数时,应根据实际情况进行合理设定,以保证电机的正常运行和使用寿命。
总结:。
伺服驱动器参数设置方法
伺服驱动器参数设置方法伺服驱动器作为现代工业控制系统中的重要组成部分,其参数设置对于系统的稳定性和性能起着至关重要的作用。
正确的参数设置可以确保系统的精准控制和高效运行,而错误的参数设置则可能导致系统不稳定甚至损坏。
因此,掌握伺服驱动器参数设置方法是每一位工程师必备的技能之一。
首先,我们需要了解伺服驱动器的基本参数,包括电流环参数、速度环参数和位置环参数。
电流环参数包括比例增益、积分时间和死区时间等;速度环参数包括速度比例增益、速度积分时间和速度死区时间等;位置环参数包括位置比例增益、位置积分时间和位置死区时间等。
这些参数的设置直接影响着伺服系统的动态响应和稳定性。
其次,根据具体的应用需求和系统特性,我们需要对这些参数进行调整。
在调整参数时,我们可以采用试错法,即先设定一个初始值,然后通过实际运行情况来不断调整,直至达到最佳效果。
在调整过程中,需要注意参数之间的相互影响,避免出现相互矛盾的设置,以免导致系统性能下降。
另外,还需要考虑伺服驱动器的保护参数设置。
保护参数包括过流保护、过压保护、过速保护和过载保护等。
这些保护参数的设置可以有效保护伺服系统不受外界干扰和意外情况的影响,延长系统的使用寿命。
最后,为了确保参数设置的准确性和系统的稳定性,我们需要进行参数调试和性能测试。
通过对系统的闭环响应、阶跃响应和跟踪性能等进行全面测试,可以验证参数设置的有效性,发现问题并及时进行调整。
综上所述,伺服驱动器参数设置是一个复杂而又关键的工作。
正确的参数设置可以提高系统的稳定性和性能,而错误的参数设置则可能导致严重的后果。
因此,我们需要认真对待伺服驱动器参数设置这一工作,不断学习和积累经验,以提高自己的技术水平,为工业控制系统的稳定运行贡献自己的力量。
汇川驱动器参数简易设置.pdf
进入设置界面:
电机面板键盘:
MODE退出和进入代码页面
SET确定
示例:进入H0502
MODE-按一下-在按一下-进入H00-调节上下键-H05-按SET键-进入三四位的输入-上下键-H0502-SET-保存
在使能(驱动器显示RUN)状态下,不能更改参数,需要断开使能才能更改参数。
设置参数:
H0231初始化设置为1断电重启(先初始化后,再设置其他参数)
H0310伺服使能需要修改参数设置为0,重新上电后再修改参数,
修改完参数后,再改为1保存
H0311上电使能0或者1默认是0一般不做修改
H0502脉冲默认是0(设置为5000或者10000)
H0202方向默认是0(如果软件方向和实际运动方向相反,改为相反的值(1))
H0815惯量默认1
H0900刚性启用设为1(要更改刚性,先将H0900设置为1,刚性参数H0901的设置
才会有效)
H0901设置刚性默认12(如果需要改刚性,一个单位一个单位慢慢加,不能一次增加过多)
H0406故障报警代码
H0407故障报警输出电平状态(默认是0),按实际情况修改
刹车:(Z轴一定要设置刹车)
H0408改为9
H04090或者1(高低电平)默认为0,一般不做修改
注意:改完后如果报Er.941,需断电再次重新上电。
报错:
Er.120驱动器和电机型号不匹配
Er.234飞车(出现轴不受控制往一个方向运动)
rdy未使能
Er.630电机堵转
Er.941需要重新上电,修改的参数才有效。
DriveMonitor软件对6SE70变频器参数的上传与下载(技术讲解)

培训资料
• 名称: DriveMonitor软件对6SE70变频器参数的上 传与下载(技术讲解)
搜索在线驱动
传动系统窗口/参数表(1)
变频器参数上传
变频器参数下载
功率部分定义
恢复出厂设置
பைடு நூலகம்
2019年x月于xx班
• 所属班组:xx • 汇报人:xx
变频器常用的参数设置方式:
【1】通过PMU进行参数输入 【2】通过OP1S进行参数输入
【3】用DriveMonitor的参数输入
接线方式:
接线方式:
在DriveMonitor和装置间建立起连接
在DriveMonitor和装置间建立起连接
启动USS总线扫描
FANUCS系列数字式主轴驱动器的参数初始化与设定

FANUCS 系列数字式主轴驱动器的参数初始化与设定在数字式主轴驱动器的维修过程中,有时会出现由于偶然性干扰或误操作引起驱动器内部参数的混乱或丢失,在这种情况下,需要进行参数的重新设定与参数的初始化操作进行恢复。
此外,在驱动器出现“A”、“AL~17”等有关CPU、ROM 的原因不明的偶发性报警时,通过参数的初始化操作,往往可以排除故障,恢复驱动器的正常工作。
A06B-6059 系列数字式主轴驱动器参数的初始化操作与参数设定的方法如下:(1)参数的初始化操作FANUCA06B-6059 系列数字式主轴驱动器参数的初始化操作按以下步骤进行:1)切断驱动器电源,将设定端S1 置TEST(在1S~3S 软件版本13B 前将SH 置SET)。
2)接通驱动器电源。
3)同时按住MODE、UP、DOWN、DA TASET4 个键,并保持1s 以上。
4)当显示器由全暗变为“FFFFF”后,松开全部键。
5)同时按住MODE、UP 键,使参数显示FC-22。
6)按住DA TASET 键 1 秒以上,显示器显示“GOOD”,标准参数写入完成。
7)切断驱动器电源,将S1(SH)重新置“DRIVE”。
8)如需要,在接通电源后再进行其他参数的调整和设定。
通过以上操作,可以使参数F41~F53 恢复到出厂设定值,同时清除有关CPUROM 的原因不明的偶发性故障。
(2)参数的显示与写入操作当驱动器参数需要检查或调整时,可以按照以下步骤进行:1)接通驱动器电源。
2)时按住MODE、UP、DOWN、DA TASET 四个键,并保持1s 以上。
3)当显示器由全暗变为“FFFFF”后,松开全部键。
4)同时按住MODE、UP 键,参数号增加:同时按住MODE、DOWN 键,参数号减少。
5)松开MODE、UP(DOWN)键后,显示参数值。
6)在松开MODE 键10s 后,显示回到转速显示方式。
参数的修改步骤如下:1)按以上第1~5 步骤选择需要修改的参数显示。
欧陆590驱动器参数上传与下载
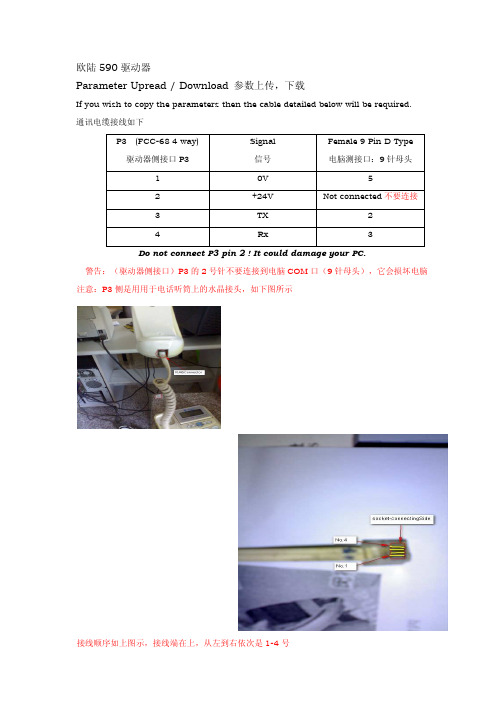
欧陆590驱动器Parameter Upread / Download 参数上传,下载If you wish to copy the parameters then the cable detailed below will be required. 通讯电缆接线如下P3 (FCC-68 4 way) 驱动器侧接口P3Signal 信号 Female 9 Pin D Type 电脑测接口:9针母头1 0V 52 +24V Not connected 不要连接3 TX 2 4Rx3Do not connect P3 pin 2 ! It could damage your PC.警告:(驱动器侧接口)P3的2号针不要连接到电脑COM 口(9针母头),它会损坏电脑 注意:P3侧是用用于电话听筒上的水晶接头,如下图所示接线顺序如上图示,接线端在上,从左到右依次是1-4号Procedures步骤如下1. Hyperlink can be accessed by opening 按照下面打开超级终端START\PROGRAMS\ACCESSORIES\COMMUNICATIONS\HYPERLINK. 开始\程序\附件\通讯\超级终端,见下附图2. Open HYPERTRM.EXE, this will ask you to name your specific setup eg. EUROTHERM 590. 打开超级终端后,并命名。
3. Change 'Connect to' so it reads 'Direct to com 1'. 选择电脑所连接的端口。
4. In the 'Port settings' menu change 'Bits per second' to '9600' and 'Flow control' to'xon-xoff'. 端口设置,波特率改9600,流量改为Xon/Xoff5. At the top of the window highlight 'Transfer' then click on 'Capture text' this will enable you to upload MMI and UDP files from the drive. 在菜单‘Transfer传送’下面的‘CaptureText捕捉’,选择文件格式MMI或UDP,MMI是可读参数,只能上传到电脑,不能下载到驱动器,带星号的参数表示可以手动修改的;UDP是机器码参数,可以上传到电脑也可以下载到驱动器。
LUST驱动器伺服驱动器下载程序

步骤一。
进入主界面点击桌面上的图标,进入到界面。
默认等级为4级。
关掉,选择。
步骤二。
展开主菜单点击便可以展开主菜单。
如果不小心关掉了主菜单,点击主界面的,主菜单将重新弹出。
步骤三。
断开软件使能在下载驱动器参数时,必须断开驱动器使能。
点击主对话框中的,进入界面,点击,设置F1F0 = ,选择,,驱动器的软件使能便断开。
软件使能断开后,主界面的电机状态显示为,此时驱动器显示灯中间的黄灯为常亮状态。
步骤四。
下载程序断开驱动器软件使能后,便可下载软件到驱动器。
点击主界面的,在中选择你需要下载的程序。
步骤五。
更改管理员级别程序下载完成后,需要更改管理员级别。
点击主界面中的,选择第6级,密码为768。
从高级别进入低级别不需要密码。
步骤六。
电机编码器自整定在选择编码器自整定时,先要确定驱动器是否处在软件使能断开状态,管理员级别是否为第6级。
如果不是,请分别对应步骤三,步骤五来修改。
选择主界面的,进入界面。
选中,确定编码器类型是否为默认值RS_RS(1)。
单击,等待几秒钟,驱动器做完一次编码器自整定后,后面的数字会改变。
记住后面数字的高两位,图示的编码器高两位为64 ;再次单击,等待几秒钟,待驱动器再次做完编码器自整定后,比较此时后面数字的高两位是否变化,即数字 64 有没有变化。
如果不变,编码器自整定可完成,按图示标号顺序来完成自整定。
如果每做次编码器自整定,后面数字的高两位都在变化,说明编码器安装有问题,请检测电机编码器及其安装是否正常。
步骤七。
电机辨向做完电机编码器自整定后,得确认电机的三相电源线相序是否正确。
点击主界面的便进入测试界面。
选择控制模式为速度控制,给定速度中输入速度值为60 ,选择开始。
比较电机的实际速度,图标识为4所示的数字63.98。
如果图标识为4所示的数字和给定速度相差很大,比如只有几转或是负数转,而且此时软件检测到的电机电流很大时,则说明电机的电源线U,V,W相序接反,任意对调其中的两相线,重新做电机编码器自整定。
SEW伺服程序下载步骤

S E W伺服程序下载步骤-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN伺服程序下载步骤一.首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
二.在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.2.联机,见图片。
选择PC interface:COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
4.选择copy unit data,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-up Set 1.出现下面画面。
3.选择Execute complete start-up.点击“下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”。
出现下面画面5.选择“下一步”出现下面画面。
6.选择Positioning with IPOS.点击“下一步”。
出现下面画面。
7.Load inertia 选择电机带动负载重量(工程经验值J0 motor 参数的5-8倍)。
选择完后,点击“下一步”,出现下面画面。
8.设置电流极限值(200℅)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Apply proposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Apply proposal”.但是100和101参数须改为fieldbus,再点击“下一步’,出现download 画面。
11.点击download,把参数下载下去。
12.打开软件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB驱动器参数初始化,静态整定,动态整定,上传及下载参数。
1 参数初始化
选中LOC/REM键,修改参数99.3为YES可自动跳回NO,可使除98,99组参数之外所有参数初始化。
一般在以下两种情况下需要做参数初始化
A.在驱动器最初送电时,由于无法确定内部参数是否完全为出厂设置,最好先做一个参数初始化,以初始化所有参数(除98,99组参数之外).
B.在你对驱动器做静态整定或者动态整定失败时,也需要做参数初始化,以避免驱动器内部存在不正确的参数。
2 静态整定
选中LOC/REM键,显示器第一行信息会显示L。
修改参数16.1为YES,依次设定99组参数(从99.2到99.9),在设定完参数99.9 MOTOR NOM POWER后,面板会自动提示您做ID MAGN,按I键进入静态识别模式(一分钟时间左右),识别成功后提示ID DONE,做静态整定时马达不转。
3 动态整定
做完静态整定,在LOC/REM键选中的情况下,修改参数99.10为STANDARD,面板会提示您IN RUN SEL ,确定参数16.1为YES,并且电机已完全脱离连轴节,电机制动器已打开(看制动器安装方式)。
按RUN键开始做动态整定(一分钟时间左右),整定时马达会从低速到高速运转直至速度减小到0,整定成功后提示您ID DOWN(也可能不提示,视具体情况)。
4 上传及下载参数
在做完静态整定,动态整定,并设置完其余所有参数后,如果要将该驱动器参数COPY到其他同型号驱动器,需要我们做上传及下载参数。
A.上传。
在LOC/REM键选中的情况下,修改参数16.3为564,按FUNC键进入功能模式,选择UP LOAD,按ENTER键,即可将驱动器中所有参数上传至操作面板。
B.下载。
在LOC/REM键选中的情况下,修改参数16.3为564,按FUNC键进入功能模式,选择DOWN LOAD,按ENTER键,即可将之前上传到操作面板的所有参数COPY到驱动器。
注意:在下载参数之前,请务必先给该驱动器做一个静态整定,参数COPY只适用于同型号机器之间,以上功能只能在停止(STOP)模式下进行。
DANFOS驱动器参数初始化,上传及下载参数。
1 参数初始化(两种方式均可)
A.修改第620组参数为INITIALIZE,可使所有参数(除参数603-605)初始化。
在修改完该参数后,一定要将VLT变频器的电源切断,然后再接通,此功能方能生效。
B.切断主电源并等候显示灯光熄灭,在接通VLT电源的同时,按下
[DISPLAY/STATUS]+[MANU]+[OK]键,显示器会出现“人工初始化”(MANUAL INITIALIZE)字样。
当显示出“装置就绪”(UNIT READY)字样时,VLT变频器已经初始化。
人工初始化可使所有参数(除参数600-605)初始化。
2 上传及下载参数
修改参数002(OPERATION SITE)为LOCAL(操作器控制)。
A.上传。
修改参数007为 UPLOAD ALL PARAM,可使变频器所有参数COPY至操作器。
B.下载。
修改参数007为 DOWNLOAD ALL,可使所有上传到操作器的参数COPY至变频器。
注意:以上功能只能在停止(STOP)的模式下进行,DANFOS驱动器无需做动态及静态整定。
SIEMENS驱动器参数初始化,静态整定,动态整定,上传及下载参数。
1 参数初始化
修改参数P60=2,P970=0,可使所有参数初始化。
2 静态整定,动态整定
按SIEMENS/ZPMC电缆卷盘调试手册操作。
3 上传及下载参数
A.上传。
打开DriveMonitor,在线后,在File中选择UPLOAD第二项Basic Device Complete,即可上传所有参数。
B.下载。
打开DriveMonitor,在线后打开所需导入的参数,File中选择DOWNLOAD第二项SA VE [EEPROME],即可下载所有参数。
SIEMSNS整流回馈单元参数初始化,中间回路电容器充电,上传及下载参数。
1 参数初始化(两种方式均可)
修改参数970=0或者P52=1,均可使所有参数初始化。
2 中间回路电容器充电
按SIEMENS/ZPMC电缆卷盘调试手册操作。
3上传及下载参数
与SIEMENS驱动器操作相同。