基于自适应模糊PI的PMSM定子电流最优控制
永磁同步电机变论域自适应模糊pid控制

永磁同步电机(PMSM)具有响应速度快、能量利用率高、转速精度高等特点,因此在工业转速调节精度低、系统响应速度慢等,提出了变论域自适应模糊PID控制方法。
变论域自适应模糊PID控制方法将PID控制器中的比例、积分、微分三个参数转换为模糊PID控制器中的模糊集合,利用模糊逻辑进行处理,并在控制器中加入了自适应因子,以自适应地调整PID参数。同时,为了进一步提高控制器的性能,引入了变论域方法,对控制器参数进行变论域处理,使控制器具有更好的鲁棒性和适应性。
变论域自适应模糊PID控制方法在永磁同步电机控制中的应用,可以提高控制器的响应速度和转速精度,同时具有较好的鲁棒性和适应性,可以应对各种复杂控制环境。
总之,变论域自适应模糊PID控制方法是一种有效的永磁同步电机控制方法,可以优化永磁同步电机的控制性能,提高永磁同步电机的应用效率和稳定性。
基于模糊PI控制的PMSM位置伺服系统仿真

基于模糊PI 控制的P M S M 位置伺服系统仿真王 翔,马瑞卿,吉攀攀(西北工业大学自动化学院,西安 710072)摘 要:本文在分析了永磁同步电机(P MS M )数学模型的基础上,在M atlab 的S m i uli n k 环境下构建了隐极式永磁同步电机位置伺服系统的仿真模型。
控制系统采用经典的三闭环结构,其中电流环采用i d =0的矢量控制策略,速度环采用PI 控制,位置环采用模糊PI 自适应控制,自适应控制通过M atl a b 软件编程。
文中给出了系统各模块仿真模型的建立方法,并针对工程系统实际参数,进行了负载突加突卸时位置、速度和转矩瞬态过程仿真与分析。
结果表明,该系统抗干扰性好,能快速准确地跟踪位置及转速给定。
关键词:永磁同步电机;矢量控制;模糊控制;建模;仿真中图分类号:TM 351;TM 341 文献标志码:A 文章编号:1001-6848(2010)03-0052-04Si m ulation of P M S M Position Servo Syste m Based on Fuzzy PI ControlWANG X iang ,MA Ru-i q i n g ,JI Pan -pan(Schoo l o fAuto m ati o n ,N orthw estern PolytechnicalUn i v ersity ,X i an 710072,Ch i n a)Abst ract :In th is paper ,t h e m athe m atic m odel o f t h e per m anent m agnet synchronous m otor (P MSM )w as ana l y zed firs,t and then t h e si m u lation m ode l of the non -salien-t po le P M S M w as estab lished i n t h e si m uli n k o f theM atlab based on the m athe m atic m odel o f t h e P M S M.The con tro l syste m adoped the c las -sica l three -close -l o op str ucture .I n this con tro l syste m,the i d =0contro l strategy i n current loop and PI contro lw ere used i n speed loop ,and also the fuzzy PI contro l i n positi o n l o op w h i c h w as realized by pro -g ra mm i n g in theM a tlab .G i v en the w ay of estab lish i n g the si m ulink m odel o f every m odu le in theM atlab g i v en in t h is paper ,and the transient processes of positi o n ,speed and torque w ere si m ulated and ana -l y zed for t h e actua l para m eters o f syste m pro ject at the ti m e o f sudden l o ad -add /unload .The si m u lation resu lts ,show the syste m is of good ant-i i n terference and able to track t h e g iven positi o n and speed quick -l y and accurate l y .K ey W ords :Per m anen tm agnet synchronous m oto r (P M S M );V ector contro;l Fuzzy contro;l M ode-l i n g ;Si m u l a ti o n收稿日期:2008-12-290 引 言永磁同步电机(Per m anent M agnet Synchronous M otor ,P M S M )因具有高效率、高控制精度、高转矩密度、宽广的调速范围以及良好的转矩平稳性等一系列优点,在交流伺服控制系统中占有重要的地位[1],近年来随着稀土永磁材料、电力电子技术、微机技术及矢量控制技术的发展,永磁同步电机在国防、工业、民用的各个领域得到了越来越广泛的应用,如火炮瞄准、数控机床、电动汽车、电梯等[2]。
基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测

基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测一、概述随着现代工业技术的快速发展,永磁同步电机因其高效率、高功率密度以及良好的调速性能,被广泛应用于各种工业场合,特别是在需要高精度、高稳定性控制的应用中,如机器人、航空航天、电动汽车等领域。
对于高速永磁同步电机而言,由于其转速高、调速范围宽等特点,使得传统的电机控制策略面临挑战。
研究适用于高速永磁同步电机的先进控制策略具有重要的理论意义和实际应用价值。
本文旨在研究一种基于模糊PI模型参考自适应(Model Reference Adaptive System, MRAS)的观测器,用于实现高速永磁同步电机转子位置的高精度检测。
该观测器将模糊PI调节器应用于模型参考自适应观测器,通过模糊控制器调整PI调节器的比例积分系数,使得PI调节器在电机宽速度范围内具有良好的动稳态性能。
该方法不需要精确的数学模型,对系统参数变化具有较强的鲁棒性,能够有效提高模型参考自适应观测器对高速永磁同步电机转子位置的检测精度。
本文首先介绍了高速永磁同步电机的研究背景和应用价值,然后详细阐述了基于模糊PI模型参考自适应的观测器设计原理和实现方法。
在此基础上,通过Matlab仿真和实验验证,对所提方法的有效性进行了深入分析。
总结了本文的主要研究成果,并对未来的研究方向进行了展望。
通过本文的研究,旨在为高速永磁同步电机的精确控制提供新的解决方案,为相关领域的研术发展和工程应用提供有益的参考。
1. 高速永磁同步电机在现代工业中的应用及其重要性。
在现代工业中,高速永磁同步电机(HSPMSM)的应用已经变得日益广泛,其重要性也日益凸显。
HSPMSM以其高效能、高功率密度、快速响应和精确控制等特点,在众多领域中发挥着重要作用。
在制造业中,HSPMSM被广泛应用于机床设备、泵、风扇、压缩机等高精度、高效率的设备中。
它们为这些设备提供了稳定的动力输出,确保了生产过程的连续性和产品质量的一致性。
一种基于模糊自抗扰的PMSM伺服控制系统[发明专利]
![一种基于模糊自抗扰的PMSM伺服控制系统[发明专利]](https://img.taocdn.com/s3/m/25b068ea6c85ec3a86c2c56c.png)
专利名称:一种基于模糊自抗扰的PMSM伺服控制系统专利类型:发明专利
发明人:朱景伟,吕潇涵,宋鑫,荆哲
申请号:CN202011017206.7
申请日:20200924
公开号:CN112039394A
公开日:
20201204
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于模糊自抗扰的PMSM伺服控制系统,包括:检测电机转子的转速信息和位置反馈θ的光电编码器;接收用户输入的电机给定信号θ和光电编码器传送的位置反馈θ的位置速度环二阶模糊自抗扰控制器,坐标变换模块,采用坐标变换算法获得电流反馈值i/i;接收位置速度环二阶模糊自抗扰控制器传送的电流给定值i/i和坐标变换模块传送的电流反馈值i/i的电流双环一阶自抗扰控制器,SVPWM生成模块,采用扇区计算方式、开关管切换时间点计算方式获取电压空间矢量PWM并输出;接收所述SVPWM生成模块传送的脉冲信号的三相逆变器,所述三相逆变器控制相应的开关器件、从而输出电机所需要的电压值。
申请人:大连海事大学
地址:116026 辽宁省大连市高新园区凌海路1号
国籍:CN
代理机构:大连东方专利代理有限责任公司
更多信息请下载全文后查看。
基于模糊PI的PMSM交流步进控制下电流的控制
t a h r p s d me h d c n o t i e f c ic ee s u od c re t o MS wi tp mo in c n rlt c n l g h t e p o o e t o a b an p re t s r t i s i u r n rP M t se . t o to e h oo y t d n f h o Ke wo d : e ma e tma n ts n h o o s mo o ;d s r t u r n ;se . t n c n r l y r s p r n n g e y c r n u tr ic ee c re t t p moi o t o o
Vo . 6 1 ,No 1 4 .0 0 t b r2 1 co e 0 2
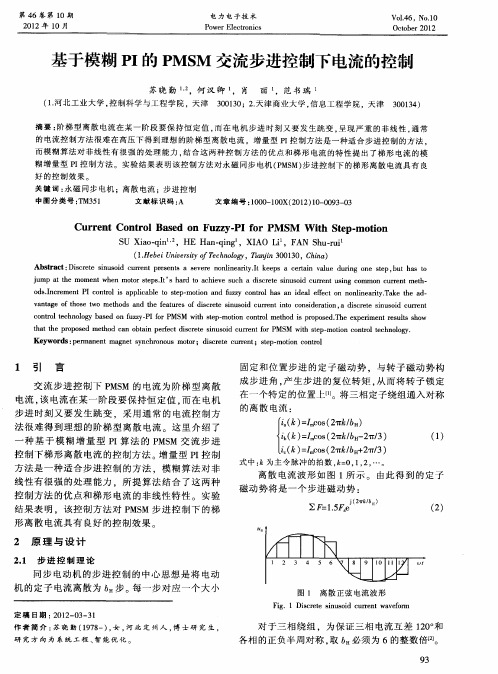
为 了形 象 地 说 明磁 动 势 的步 进 作 用 ,绘 出步 进 磁动势在 复数平面 中的 l 2个 位 置 ,如 图 2所
定 电流 规 定 的误 差 域 内 。 为减 小 误 差 , 尽 可 能提 应 高 厂 可选 择 厂 高 的 开关 元 件 , I B , 较 如 G T等【。 4 j
( . 北 工 业 大 学 , 制 科 学 与 工 程 学 院 ,天 津 1河 控 30 3 ;2天 津 商 业 大 学 , 息 工 程 学 院 ,天 津 0 10 . 信 303 ) 0 14
摘 要 : 梯 型 离 散 电流 在 某 一 阶 段 要 保 持 恒 定 值 , 在 电机 步 进 时 刻 又 要 发 生 跳 变 , 现 严 重 的 非 线 性 通 常 阶 而 呈 的 电 流 控 制 方 法 很 难 在 高 压 下 得 到 理 想 的 阶 梯 型 离 散 电 流 。增 量 型 P 控 制 方 法 是 一 种 适 合 步 进 控 制 的 方 法 I
基于PSO算法模糊控制在PMSM调速系统的应用

基于PSO算法模糊控制在PMSM调速系统的应用摘要:本文首先介紹了永磁同步电机的作为船舶电力推进系统的优点,详细介绍了模糊控制原理以及参数自整定模糊PI控制原理,在模糊控制的基础上将基于粒子群算法的变论域模糊控制应用在船舶电力推进永磁同步电机的控制上,对控制系统的控制性能进行分析并与常规PI以及模糊PI进行比较,控制效果明显改善。
本文建立的基于粒子群算法的变论域模糊PI控制PMSM模型,是永磁同步电机的控制策略的一种选择,这使得提高船舶电力推进系统控制性能成为可能。
标签:永磁同步电机,模糊PI控制,粒子群算法一永磁同步电机永磁同步电机是电力推进船舶推进电机的理想选择。
因为船舶电力推进系统和PMSM拥有的诸多优点,所以对永磁同步电机的控制系统进行研究意义深远。
本文着重对PMSM的控制方法以及PMSM在船舶电力推进系统中的应用进行了叙述和研究,通过和传统的PI控制以及模糊控制作比较后,本文所设计的基于粒子群算法的模糊控制在控制性能上面优于以上常规控制方法,具有较强鲁棒性,跟踪效果好,收敛速度快等优点:二模糊控制模糊控制工作原理如下:首先需要获得误差信号E,计算机经过采样最先活的控制量的当前值,然后将控制量的当前值与控制量的给定值进行比较,得到误差信号E,此值就可以作为控制器的一个输入值。
将E的值进行模糊化之后便得到E的模糊量,然后用模糊化语言表示误差E的模糊量,可以得到一个模糊矢量e,这个模糊矢量属于误差E的模糊语言集合,最后要得到模糊控制量u还必须对模糊矢量和模糊控制规则R进行模糊决策三粒子群算法Kennedy和Eberhart通过对动物捕食的行为观察得出了粒子群优化算法,在一个区域内,一群鸟随机的搜索食物,如果明确食物的位置和自己的位置,那么最有效的搜索办法就是搜索种群中距离食物最近的鸟所处区域。
PSO算法通过鸟捕食的过程得到启发用于解决实际问题。
PSO算法中,例子在搜索空间中所处于的位置就是优化问题的待求解,每个例子都有一个适应值,这个适应值由被优化的目标函数决定,粒子飞行的方向和飞行距离由他们的速度决定,所以所有得粒子就跟随最优粒子在解空间中搜寻最优解。
基于改进模糊PI控制器的PMSM矢量控制系统仿真

基于改进模糊PI控制器的PMSM矢量控制系统仿真胡堂清;张旭秀【摘要】PMSM具有非线性、强耦合、参数时变的特点,传统PI控制器存在参数不能跟随系统状态改变而做出自整定的问题,模糊PI控制器的控制系统仍存在超调量大,震荡,转矩脉动较大等问题.针对上述问题,该文给出了一种改进的模糊控制规则,将输入信号模糊化,进行模糊规则推理,使模糊控制器可以输出更适合系统当前状态的调整量,实现对模糊PI控制器的优化.仿真结果表明,采用改进模糊PI控制调速系统,有更快的响应速度,而且超调量小,抗干扰能力强,使系统的动、静态特性有明显的提升,验证了该模糊控制规则的可行性及优越性.【期刊名称】《自动化与仪表》【年(卷),期】2019(034)006【总页数】5页(P91-95)【关键词】永磁同步电机;矢量控制;改进模糊PI控制;改进模糊控制规则;仿真【作者】胡堂清;张旭秀【作者单位】大连交通大学电气信息工程学院,大连116028;大连交通大学电气信息工程学院,大连116028【正文语种】中文【中图分类】TM341近年来,永磁同步电机在工业领域得到了广泛应用,小到微特驱动系统,大到牵引传动系统、工业风机水泵等[1]。
永磁同步电机是一个具有非线性、多变量、参数时变等特点的复杂对象[2],在控制系统要求条件比较高时,纯粹的采用传统PI 控制,控制效果往往不理想,容易存在超调量大、系统响应速度慢、转矩脉动过大等问题,使用模糊PI 控制的系统能有效地改善上述问题,但由于模糊控制规则的不足,使得普通模糊PI 控制系统仍存在超调量大、转矩脉动大的问题。
本文提出了一种改进模糊控制规则,可以输出更为合理的调整量ΔKp、ΔKi 对PI 控制器的参数进行调节,把改进型模糊控制PI 控制器作为电流环控制器应用到矢量调速系统中,可以实现比普通模糊PI 控制系统和传统PI 控制更好的控制效果。
通过仿真可以看出,应用改进模糊PI 控制器的系统在动、静态特性上都要优于采用传统的PI 控制器和普通模糊PI 控制器的系统。
基于模糊PI控制的PMSM驱动控制系统
基于模糊PI控制的PMSM驱动控制系统姜伟;孙军;裘信国【摘要】针对PI参数自整定存在控制系统数学模型的精确度、整定效率低和优化时间长的问题,提出一种基于模糊控制的参数自整定的优化策略.以伺服控制系统的数学模型为基础,根据模糊控制的基本原理,设计PMSM的速度模糊PI控制器.然后根据矢量控制原理,在MATLAB/Simulink仿真平台上搭建PMSM控制系统的模型,并对PMSM控制系统进行了仿真.仿真结果表明:在传统PI控制的基础上增加参数自整定是正确和有效的,能使伺服系统具有较强的负载抗扰性和良好的动态跟踪性能.【期刊名称】《轻工机械》【年(卷),期】2015(033)005【总页数】4页(P69-72)【关键词】永磁同步电机(PMSM);参数自整定;PI控制器;模糊控制【作者】姜伟;孙军;裘信国【作者单位】浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014【正文语种】中文【中图分类】TP13传统伺服控制系统中,系统参数的变化与控制系统的控制性能好坏有直接关系,例如转动惯量参数和负载转矩参数发生变化的时候会导致系统震荡。
保持系统参数的稳定,就能保证控制系统工作正常,并且其有良好动态性能。
传统的PI控制参数是固定的,因此需要对PI参数进行自整定。
参数整定的方式主要可分为2大类:利用规则调节PI参数和利用模型调节PI参数。
利用模型调节PI参数的方法十分复杂,伺服系统的一些参数会不断变化,数学模型很难精确地表达。
而且为了建立模型还要做出诸多假设,模型很难做到非常精确[1]。
本文采用模糊参数自整定的方法对PI参数进行整定。
在传统PI控制的基础上,在系统参数发生变化时,利用模糊规则调节PI控制器的参数,从而使控制系统始终保持良好的动静态性能。
1 速度环模糊PI控制器的设计1.1 PI控制器在控制系统中,电流环的时间常数远远小于速度环的时间常数,相对于速度环来说电流环的变化可以忽略不计,因此可以将速度环等效成一阶增益环节。
基于自适应模糊PID的PMSM矢量控制系统研究

K=p' K=i'
K=d '
K p + ∆K p ;
Ki + ∆Ki ;
Kd + ∆Kd。
(2)
根据控制规则并结合实际专家运行工作经验设 计PMSM的速度控制回路的PID参数K p、K i和K d的 模糊控制规则表。 3 系统仿真及结果分析
该控制系统的仿真参数如下:定子电阻 R s=2.785Ω,d 轴电感L d=8.5mH,q 轴电感 L q=8.5mH,极对数P n=4。通过对传统PID控制的 PMSM模型和改进的PMSM模型进行对比实验,验 证改进模型的正确性。整体系统采用双闭环控制方 案:电流环采用PI控制器,速度环采用自适应模糊 PID控制器,在Simulink中构建出PMSM的矢量控制 系统。
负载发生变化,也能看出无论在定子电流瞬时变 化,还是d 轴电流的波动变化,模糊自适应PID控制 都能呈现很好的控制效果。
(a) 传统PID控制
(b) 传统PID+解耦控制
(c) 模糊自适应PID控制+解耦控制 图3 仿真结果 参考文献
[1] Henson M A,Seborg D E.An internal model control strategy for nonlinear system[J].AJChE: Journal,1991,7(7):1065-1081.
·18·
制,并最终实现电流环独立调节;速度环采用自适 应模糊PID的调节方式,增强了系统抵抗负载扰动 的能力及决定系统的控制性能。当电机转速变化 时,d 、q 轴电流控制精度下降,动态时过渡过程明 显变慢。所以,解决电压动态解耦是提升伺服控制 性能的关键。从式(1)可以看出,永磁同步电机 的d 、q 轴电压u d、u q之间存在相互干扰的旋转电动 势,旋转电动势对i d、i q的控制产生影响。
基于模糊PI永磁同步电机优化矢量控制系统的研究
电气传动2016年第46卷第3期基于模糊PI 永磁同步电机优化矢量控制系统的研究樊英杰,张开如,马慧,韩璐,狄东照(山东科技大学电气与自动化工程学院,山东青岛266590)摘要:介绍了永磁同步电机(PMSM )的数学模型和基本原理。
针对PMSM 中传统PI 控制器参数固定、无法兼顾静态性能和动态性能的缺陷性,在传统双闭环控制策略的基础上,将速度外环采用模糊PI 控制器,在线调整PI 控制器的2个参数,增强系统的鲁棒性。
逆变器环节采用优化SVPWM 算法,该方法利用电压空间矢量旋转的幅角来判断扇区,并由三相电压的电压差值计算基本电压矢量的作用时间,与传统SVPWM 相比简化了矢量算法步骤。
仿真结果和小波分析表明,模糊PI 优化矢量控制系统与传统PI 矢量控制系统相比具有更好的动态稳定性和抗干扰能力。
关键词:永磁同步电机;速度外环;模糊PI 控制;逆变器;优化SVPWM ;小波分析中图分类号:TM341文献标识码:AStudy of Permanent Magnet Synchronous Motors Optimized Vector Control SystemBased on Fuzzy PI ControllerFAN Yingjie ,ZHANG Kairu ,MA Hui ,HAN Lu ,DI Dongzhao(College of Electrical Engineering and Automation ,Shandong University ofScience and Technology ,Qingdao 266590,Shandong ,China )Abstract:The mathematical model and the basic principle of permanent magnet synchronous motors werepresented.Focusing on the defects of traditional PI controller of PMSM -fixed parameter making it unable to satisfy both static and dynamic performance ,based on the traditional double -closed loop strategy ,proposed to employ fuzzy PI controller for outer speed loop ,which could adjust two parameters of PI controller on line and improve the robustness.An optimized SVPWM was applied to inverter ,by which the sector could be judged according to the rotating argumentof voltage space vector ,and the function time of basic voltage vector could be calculated based on the 3phase voltage difference computation and the algorithm steps were more simplified compared with the conventional SVPWM.The simulation results and wavelet analysis show that the fuzzy PI optimized vector system is superior the conventional PIvector control system in dynamic stability and anti -interference performance.Key words:permanent magnet synchronous motors (PMSM );outer speed loop ;fuzzy PID control ;inverter ;optimized SVPWM ;wavelet analysis作者简介:樊英杰(1990-),男,硕士研究生,Email :****************永磁同步电机(PMSM )以其体积小、效率高、功率密度大而得到了广泛的应用,特别是国内永磁材料的发展使得PMSM 应用更加广泛[1]。
基于参数自整定模糊PID控制器的rTSMC-PMSM矢量控制

基于参数自整定模糊PID控制器的rTSMC-PMSM矢量控制陈瑛;吴立峰;杨二龙
【期刊名称】《南昌大学学报(工科版)》
【年(卷),期】2016(038)004
【摘要】针对由双级矩阵变换器驱动的永磁同步电机(TSMC-PMSM)矢量控制系统存在的响应速度较慢、稳态性能差的缺陷,提出了在线自整定模糊PID控制算法以实现优化TSMC-PMSM矢量系统的调速性能.介绍了双级矩阵变换器与永磁同步电机的矢量控制技术相结合,并在此基础上搭建了采用模糊PID控制器的TSMC-PMSM矢量控制系统,并建立Matlab/Simulink仿真模型.仿真结果表明:模糊PID 控制器减少了系统的超调,提高了矢量控制系统的鲁棒性,并且改善了变换器网侧的电能质量.
【总页数】6页(P391-396)
【作者】陈瑛;吴立峰;杨二龙
【作者单位】南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031
【正文语种】中文
【中图分类】TM301.2
【相关文献】
1.基于S函数实现的参数自整定模糊PID控制器 [J], 鲁改凤;卢东伟;孟波;王佳;鞠阳
2.基于S函数实现的参数自整定模糊PID控制器 [J], 鲁改凤;卢东伟;孟波;王佳;鞠阳;
3.基于参数自整定的模糊PID控制器及其应用 [J], 黄伟;巫茜
4.基于MATLAB的参数自整定模糊PID控制器的两种设计方法 [J], 杨璐;雷菊阳
5.基于时滞系统的参数自整定模糊PID控制器的设计与仿真研究 [J], 段五星;张新政
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊自适应的永磁同步电机矢量控制系统

基于模糊自适应的永磁同步电机矢量控制系统王贤会;李宝营;冯荻【摘要】提出了一种基于模糊自适应的永磁同步电机(PMSM)矢量控制系统的速度控制器的方案.模糊自适应控制器由模糊逻辑控制器和传统的PI控制器组成,采用模糊自适应控制器的输出对传统PI参数进行实时调整,使其具有模糊逻辑在处理不确定信息方面的能力和PI控制在线性系统中的良好性能.Matlab的仿真结果表明,采用模糊自适应建立的永磁同步电机的速度控制器,在系统参数发生变化或者受到外部扰动的情况下,PMSM矢量控制系统具有较好的动态响应特性%The implementation of self-adaptive fuzzy controller for speed control of a permanent magnet synchronous motor (PMSM) was proposed.The controller was consists of a fuzzy logic controller term and a traditional PI control term.The output of the fuzzy adaptive controller was used to adjust the traditional PI parameters in real time, which made it have the ability of fuzzy logic to deal with the uncertain information and good performance of the PI control in the linear system.The simulation results of Matlab showed that the dynamic characteristics of the proposed controller was reliable under the condition of parameter variations and external disturbance.【期刊名称】《大连工业大学学报》【年(卷),期】2017(036)003【总页数】4页(P227-230)【关键词】永磁同步电机;模糊自适应控制器;比例积分控制器【作者】王贤会;李宝营;冯荻【作者单位】大连工业大学信息科学与工程学院, 辽宁大连 116034;大连工业大学信息科学与工程学院, 辽宁大连 116034;大连理工大学机械工程学院, 辽宁大连116024【正文语种】中文【中图分类】TM341交流电机广泛应用于工业和家庭,如电动汽车、工业机器人、空调、洗衣机等。
基于模糊PI控制器的PMSM矢量控制

基于模糊PI控制器的PMSM矢量控制张洪新;涂群章;蒋成明;潘明;黄皓【摘要】针对永磁同步电机非线性、多变量、强耦合与参数时变易干扰的特点,将模糊控制器应用于矢量控制系统,提出了一种基于模糊理论PI控制器,利用模糊控制对PI控制器中的参数在线调整,使得模糊PI控制器同时具有模糊控制灵活性强和PI控制精度高的优点,从而达到最优控制.在MATLAB/SIMULINK环境中对系统进行了仿真研究,结果表明模糊控制器较普通控制器具有更快的响应速度,更小的超调量以及更强的鲁棒性,能够有效改善系统的动静态性能.【期刊名称】《装备制造技术》【年(卷),期】2017(000)007【总页数】4页(P127-130)【关键词】永磁同步电机;矢量控制;模糊控制;PI控制器【作者】张洪新;涂群章;蒋成明;潘明;黄皓【作者单位】解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007;解放军理工大学野战工程学院,江苏南京210007【正文语种】中文【中图分类】TM341永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因具有效率高、功率密度高等特点,在电驱动工程装备调速系统拥有较广泛的应用前景。
但是永磁同步电机自身的参数(如转子电阻)和拖动负载的参数(如转动惯量)在某些应用场合会随着工况而变化;同时,电机本身实质上是一个非线性的被控对象[1]。
控制对象的参数变化与非线性特性,使得难以建立精确的数学模型,导致了传统PI(Proportion Integration)控制器往往无法达到满意的控制效果,存在响应速度慢、转速超调、转矩脉动过大等问题。
针对传统PI控制器的不足,文献[2]提出采用引入输入微分前馈,将误差比例环节与误差积分环节并联的结构改为误差比例微分环节与积分环节串联的结构,但加入微分环节容易造成系统早期饱和。
基于自抗扰理论的PMSM电流环控制算法

基于自抗扰理论的PMSM电流环控制算法王福欣;郜世杰【摘要】针对传统的永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)采用比例-积分-微分(Proportion-Integral-Derivative,PID)控制器进行电流控制,在恶劣环境下电流波动较大、稳定性较差的问题,提出一种基于自抗扰理论的PMSM电流环控制算法.采用自抗扰控制器(Active Disturbances Rejection Controller,ADRC)取代PMSM q轴电流环的PID控制器,并在MATLAB/Simulink中搭建ADRC模型,进行建模仿真.结果表明,将自抗扰理论应用到PMSM电流环的控制算法中,PMSM的电流波动更小,运行更平稳.【期刊名称】《上海船舶运输科学研究所学报》【年(卷),期】2018(041)003【总页数】5页(P24-28)【关键词】永磁同步电机;PID控制器;自抗扰控制器;电流环控制【作者】王福欣;郜世杰【作者单位】上海船舶运输科学研究所航运技术与安全国家重点实验室,上海200135;海军驻广州地区军事局,广州510000【正文语种】中文【中图分类】U664.1210 引言永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服控制系统一般采用三闭环结构(即速度环、位置环和电流环),其中电流环作为最内环结构,用来保证定子电流对电流指令的快速准确跟踪,其控制性能直接影响着位置环和速度环的控制性能,对于整个电机的控制而言具有重要作用。
目前在PMSM的磁场定向控制中,通常采用比例-积分-微分(Proportion-Integral-Derivative,PID)控制器分别对旋转坐标系的d轴和q轴进行控制,控制过程简单,容易得到实践[1]。
随着电路电子技术的发展,PID控制器在控制电流方面逐渐暴露出电流波动性较大、抵抗扰动的能力较差和稳定性不足等问题。
基于SCA优化模糊PI控制器的PMSM转速控制

基于SCA优化模糊PI控制器的PMSM转速控制陈冬;赵宇红【摘要】介绍了永磁同步电机(PMSM)在矢量控制系统中转速环的模糊PI控制器设计.针对模糊控制器无法自适应调整参数,研究分析一种新型智能优化算法——正弦余弦算法,并对影响该算法全局探索和局部开发能力的重要参数进行调整,使搜索结果更精确,将改进后的算法用于模糊控制器量化因子和比例因子的优化.仿真结果表明,基于正弦余弦算法优化的模糊PI控制较传统模糊PI控制,具有更好的动态性能和抗干扰能力以及鲁棒性强的特点.【期刊名称】《电气传动》【年(卷),期】2019(049)005【总页数】6页(P31-36)【关键词】永磁同步电机;转速控制;模糊PI控制器;正弦余弦算法【作者】陈冬;赵宇红【作者单位】南华大学电气工程学院,湖南衡阳 421001;南华大学电气工程学院,湖南衡阳 421001【正文语种】中文【中图分类】TM341永磁同步电机(PMSM)由于其高性能、低成本、合适的速度控制范围和较少的维护等特点,获得了越来越多的关注[1-2]。
相较于电励磁同步电机,PMSM的运行原理与之类似,但它以永磁体提供的磁通取代励磁绕组励磁,电机的结构更加简单。
由于高场强钕铁硼(NdFeB)磁体价格合适、磁性能优良,使其在工业中的应用越来越广泛[3]。
多种控制策略诸如无传感器控制、混合控制已经被应用到了PMSM的高精度转速控制中[4-5]。
在PMSM的矢量控制系统中,PI控制器设计简单,成本低廉,应用极广。
基于模糊规则的模糊控制因其语言术语及if-then规则的结构,常与PI 控制结合以提高控制精度[6]。
而控制器参数的调节过程是在使用控制器中十分重要的一步[7]。
近年来,智能优化技术不断涌现,如遗传算法(GA)、粒子群优化(PSO)、蜂群优化(BCO)、蚁群优化(ACO)、模拟退火(SA)和细菌觅食(BF)[8]。
GA在模糊控制器的参数寻优中应用最为广泛,但其存在运算量大、参数依赖性强的缺点。
基于模糊PI控制器的永磁同步电动机最大转矩电流比控制

基于模糊PI控制器的永磁同步电动机最大转矩电流比控制舒佳驰;刘明基;郭韩金
【期刊名称】《电机与控制应用》
【年(卷),期】2014(41)1
【摘要】为了充分利用内嵌式永磁同步电动机(IPMSM)的磁阻转矩,从理论上研究了最大转矩电流比(MTPA)控制策略,并采用模糊PI控制器对IPMSM的速度进行控制.采用极值原理推导了转矩一定时所需最小定子电流对应的电流矢量相位角,从而确定了MTPA控制时d、q轴电流的最优分配关系.为改善传统PI调速系统的动态性能,转速调节器采用模糊PI控制器实现参数在线修正.基于MATLAB/Simulink 仿真软件实现了永磁同步电机MTPA控制系统的模型搭建及仿真.仿真结果表明,模糊PI具有更好的动、稳态特性.
【总页数】5页(P9-13)
【作者】舒佳驰;刘明基;郭韩金
【作者单位】华北电力大学电气与电子工程学院,北京 102206;华北电力大学电气与电子工程学院,北京 102206;华北电力大学电气与电子工程学院,北京 102206【正文语种】中文
【中图分类】TM301.2
【相关文献】
1.基于智能PI的永磁同步电动机近似最大转矩电流比控制 [J], 张伦健;陈利萍
2.基于最大转矩电流比的永磁同步电动机矢量控制 [J], 田以涛;王英
3.基于模糊控制的凸极永磁同步电动机最大转矩/电流比控制策略系统仿真 [J], 高金波;张庆范
4.基于模糊PI控制的永磁同步电动机伺服控制器设计 [J], 杨向宇;蔡晓铭;姚佳
5.基于梯度下降法的永磁同步电动机最大转矩电流比控制 [J], 张辉;王剑;郭涛;史军伟;胡堃
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要 : 据 永 磁 同 步 电动 机 ( em nn Man t yc rnu t , 称 P M) 数 学 模 型 和 转 子 磁 场 定 向 控 制 策 根 P r a et ge S nhoo s o 简 Mo r MS 的 略. 建立 了采 用 定 子 电流 最 优 控 制 的 P M 驱 动 系 统 。 利用 模 糊 控 制 构 建 自适 应 模 糊 P 控 制 器 , 现 转速 -x s c re tr f r n e i ac l td b o s n o q e f x w a e n o sa tp we n p r g a h d p e , i h t e d a i u r n e e e c s c lu ae y c n t ttr u , u — e k n a d c n tn o ri a a r p a l a d t e q a i u e t ee e c sp o i e y t e f z y P .h x e i n a e u t s o h tt e s s m d l a e n n h -x sc r n f r n e i r vd d b h u z I e e p rme tlr s l h w t a h y t mo e s d o r T s e b
Th e Optm um i Cur e c o nt o f Pe m a e tM a ne y hr no o o r ntVe t r Co r lo r n n g tS nc o usM t r Ba e n S l- da tv s d o e fa p i e Fuz y PI z
第4 4卷 第 4期
2 0年 4月 01
电 力 电 子 技 术
Po rElcr nis we e to c
Vo . 1 44.No4 . Aprl 2 0 i , 01
基于 自适应模糊 P 的 P M 定子 电流最优控制 I MS
肖杨 柳 , 腊吾 ,黄 守道 ,张 蕊 周
闭环控制 , 高了系统 的动 态和稳态性能。为使 电动机在整个运行速度 范围 内能输 出最大功率 , 提 采用交轴 电流参考
由模 糊 P 环 节 给 出 , I 直轴 电流 参 考 分 段 , 即恒 转矩 、 磁 扩 速 及 恒 功 率 段 , 算 给 出定 子 电流 最 优 算 法 。实 验 结 果 表 弱 计
to n c ivig s e d an ure u e co e —o p,he dy a i a d ttc pef r a c o h s y tm s be n m — r li a he n p e d c rntdo bl ls d lo t n m c n sai ro m n e ft i s se ha e i pr v dI r e o k e te o t utpo rm a i un i he wh l pe d r ng t pt a ttr c re e tr c n r li o e .n o d r t e p h u p we xm l n t oe s e a e,he o i lsao u r ntv co o to s m
明. 基于模糊 P 控制 的系统模 型具有动态响应快 、 I 稳态精度 高及抗干扰能力强等优点。
关 键 词 : 磁 同步 电机 : 糊 控 制 :矢 量控 制 ; 子 电流 最 优 永 模 定
中图 分 类 号 : M3 3 T 1 文 献标 识码 : A 文 章 编 号 :0 0 I O 2 1 ) 4 0 4 — 3 1 0 一 O X( 0 0 0 — 0 5 0
XI A0 n —i Ya g lu,ZHOU — La WU,HUANG h u d o.ZHANG i S o .a Ru
( u a nvri , h nsa4 0 8 ,C ia H nnU i sy C agh 10 2 hn ) e t Abta tT i pp r s bi e em n n mant y crnu t ( MS s c:hs ae t lh s p r ae t ge sn hoo s o P M)d v ytm。hc ae ntema e r ea s a mo r i r ess e w i bsdo t — h h h
slaa t e uz I ot l a srsos ,ihacrc n odatjmmn aa it adS n ef dpi zyP nr s atep nehg c uay dgo nia ig p bly n O . - vf c oh f a - c i o
Ke wo d : e a e t g e y c r n u t r u z o to ;v c o o t l p i m u r n e t r y r s p r n n m ma n t n h o o smoo ;f z y c n r l e t rc n r ;o t s o mu c r t c o e v
mai a d l f MS i h g ei e d o e td c n r l tae yUsn d p i e P o t l r o sr c e y f z yc n t l c mo e o P M n t e ma n t f l r n e o to r tg . i g a a t I n r l n t t d b u z o — ci i s v c oec u