2013年度清华大学欧维姆奖学金颁奖仪式
杨卫

截至2010年7月,杨卫先后获得国家教委科技进步一等奖3项,国家教委科技进步二等奖(第一获奖人);国 家教委科技进步一等奖(第一获奖人),国家自然科学三等奖两项。
2002年获得全国五一奖章。1995年曾获国家自然科学三等奖、2005年获得国家自然科学二等奖。
杨卫认为:在研究型大学里面,一个教师要想真正把学生教好,还得搞科研。“他(老师)因为搞科研而不 搞教学,这个是不对的。能不能把最先进的东西,用学生能够接受的方式,融入到大学和研究生的教育中,这是 取决于一个学校是不是能够培养出高水平人才的关键。”“对于学生来讲,不光是接受已经有了知识,他还得养 成具有创造的能力以及对前沿科学的了解,这样他才能在毕业的时候站在更高的起跑线上,有更好的能力做自己 的事情。”
个人生活
杨卫的父亲杨光华是获得美国博士学位的高级知识分子,曾担任过清华大学石油系主任、北京石油学院副院 长及石油大学校长等职务。母亲孙以实曾是清华大学化工系的教授。他的儿子杨越在2000年到2004年就读于浙江 大学机械与能源工程学院本科 。
马清运
马清运马清运,美国建筑师协会会员,设计总监。
1995年,在纽约成立马达思班建筑师事务所,总部设在上海,设计作品有恒隆广场、宁波日报社总部、天一广场、宁波老外滩街区改造、浙江大学宁波分校、宁波服装学院等等。
2006年担任美国南加州大学建筑学院院长。
中文名:马清运外文名:Ma Qingyun国籍:中国民族:汉族出生地:陕西西安出生日期:1965年职业:建筑师、教授毕业院校:清华大学、宾夕法尼亚大学主要成就:美国建筑师协会会员创办马达思班建筑师事务所美国南加州大学建筑学院院长代表作品:父亲的宅(玉山石柴)个人履历1965年生于陕西省西安市。
1988年毕业于清华大学建筑系。
1983-1988 北京清华大学建筑学学士1989-1991 美国宾州宾夕法尼亚大学美术研究生院建筑学硕士[1] 在宾夕法尼亚大学期间,曾获得Shenck-Woodman欧洲旅行奖。
1991年毕业时获Frank-Miles Day荣誉毕业并取得建筑硕士学位。
毕业后曾先后在费城Ballinger及纽约KPF任设计师、高级设计师,成为这两个建筑事务所的主要设计力量。
在Ballinger期间,为该公司从服务型事务所转化为设计型事务所立下汗马功劳。
在KPF期间成为该事务所早期东南亚工程事务的开拓型成员之一。
1992年开始,马清运先生开始在宾夕法尼亚大学美术研究生院任客座教授。
1995年在纽约成立马达思班建筑师事务所。
1995年任中国深圳大学建筑系客座教授及设计院院长助理。
1996年,马清运参与并协助了国际知名建筑师Rem Koolhaas 在哈佛大学举行的珠江三角洲城市状态的研究,并成为Koolhaas先生《大跃进》(Great Leap Forward)一书的评论员(Commentator)1997年成为宾夕法尼亚大学艺术研究生院的全职教师,任研究生主线设计工作室(core studio)教授及毕业论文的导师。
1997年马清运更被Rem Koolhaas推荐参加在法国蓬皮杜艺术中心(Pompidou Center)举办的题为"新世纪建筑的趋势"的演讨及展览会,成为21位世界范围内选择出的青年建筑师中唯一的中国人。
科学中国人(2013)年度人物展示

龙源期刊网 科学中国人(2013)年度人物展示作者:来源:《科学中国人》2014年第09期亲爱的读者朋友们,感谢您多年来对“科学中国人年度人物评选活动”始终如一的关注、支持和厚爱。
“科学中国人年度人物评选活动”始于2002年,是我国科技界具有专业品质和重要影响力的一项评选活动。
截至目前,此项活动已经成为广大科技工作者,特别是两院院士中认知度最高、备受社会各界推崇的一个品牌活动,已成功举办12届,在以往的评选中,我们先后评选出了袁隆平、师昌绪、杨振宁、闵恩泽、徐光宪、陈可冀、卢世璧、白春礼、顾秉林、孙家栋、黄伯云、王小谟、邓中翰、冯军等多名为我国科技事业发展做出突出贡献的科技工作者、科教管理者和科技型企业家。
2014年7月5日,科学中国人(2013)年度人物揭晓,再次引发了科学界的广泛关注。
为使评审更加公平公正,清华大学新闻与传播学院新闻研究中心依据学术影响力、社会影响力两项评价指标,为本届年度人物评审建立了评价体系。
整体评选活动依据“影响力、创造力、转化力、责任感”等多项评选标准,最终确定了获奖名单,共评选出清华大学生命学院院长、中国科学院院士施一公,“天宫一号”总设计师、中国空间技术研究院研究员杨宏,中国科技大学副校长、中国科学院院士潘建伟,“中国4G掌门人”、东南大学教授尤肖虎等80位获奖者。
本届年度人物特设5项特别奖。
其中,中国“氢弹之父”、中国科学院院士于敏获“终身成就奖”,诺丁汉大学校长、中国科学院院士杨福家获“杰出大学校长奖”,杭州电子科技大学教授徐铭恩等11人获“杰出青年科学家奖”,深圳市赛百诺基因技术有限公司总裁徐卫等5人被授予“科技型企业家”,北京太华兄文化发展有限公司董事长田太华获“文化艺术创新奖”。
“科学中国人年度人物评选活动”一路走来,一步一个脚印赢得了业界的肯定。
我们会继续努力,敬请期待更多属于科技人物的荣耀。
校庆捐款名单(2011-2013 年) - 清华大学经济管理学院

丁远奎、吴健刚、谢鹏、焦平 贺从戎、刘钧、田垣芳、帖荣彤、许新毅、云涛、张黎科 陈天元、程春红、李映红、宋矗林、田树新、杨浩、张保国 胡绍武、谢道东 陈东林 李良栋、刘志强、钟春平 高胜达 陈滨、郭峰、匡林荭、廖文彬、吕品、尚嘉玥、王兴丽、王志伟、严旭东、于鑫、王海生 冯永祥、金强、刘慧、柳庆明、潘克辉、孙振国、赵博 初晓白、冯珂、刘宾、刘雁鸣、倪子君、舒涛、王继鹏、王小龙、张春雷 伍欣、谢强、张宇、王砾 罗辑、张茹、张英杰 陈利军、宋健雄、王立、张国春 曹 伟,昌自立,程新东,代中平,邓建军,邓晓磊,丁李节,丁明晖,丁兆士,董立,杜健,方 成,高继元,高立兵,顾忠永,关明星,管秀仙,桂曙光,郭 华,郭昊,何明镜,洪卫华,胡伟, 胡洋,胡文胜,黄楠,江男,姜杉,李明山,李中禹,林耀佳,刘宁,刘桂萍,刘志强,刘忠玲, 卢萍萍,卢盈军,路冬霞,吕小锋,罗正华,马介武,马雅荣,潘建飞,邱岗,孙孝立,谭洪源, 万继民,王炜,王玺,王春勇,王舒宇,王素朝,吴显光,吴振金,夏德军,徐锐,薛钦,薛镇平, 荀新平,严矫平,殷江,尤欣,曾文桃,张劲,张军,张涛,张涛,张远林,章海毅,朱国洪 乔军,赵迟,刘扬,闫伟华,伍长春,孙娜,隋晓风,梁丹,李尔龙,陈灵芝,樊宇雄,关磊,赵 洋,侯振中,贾文静,张明,于春青,周海峰,王国省,刘文祥,龚小凤,王大伟,张鑫,郑文晖,
经双 1991 经双 1993-1 经硕 1980 经硕 1982 经硕 1983 经硕 1984-研究生班 经硕 1985-研究生班 经硕 1987 经硕 1988-干研 经硕 1988-管硕 经硕 1987 经硕 1989 经硕 1990 经硕 1990-管硕 经硕 1991 经硕 1991-管硕 经硕 1992 经硕 1993 经硕 1994-1 经硕 1995 经硕 1999 经硕 2000 经硕 2001 经硕 2002-2 经硕 2002-3 经硕 2005-1 经硕 2006-1 经硕 2006-1 经硕 2007-1 经硕 2008-1 经博 1993 经博 1995
2013至2014学年度武汉理工大学国家奖学金名单
12676 12677 12678 12679 12680 12681 12682 12683 12684 12685 12686 12687 12688 12689 12690 12691 12692 12693
第 4 页,共 19 页
71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88
薛前 蒋龙 马栋梁 刘也萍 刘圣源 许晓彤 周雷 余安正 许新 陈熙 徐杨 马凯文 傅逸蒙 郑扬银 苏策 罗文涛 喻奕 李莉
武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学
杨宏欣 何湘 张杨伊兰 易凤梅 鲁丽盈 孙倩 江珊 罗香 谢莹莹 韩晓靖 袁飞飞 汤骅 邓悦 张雨溪 谢威 金颖婕 刘晏岑 王颖
武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学
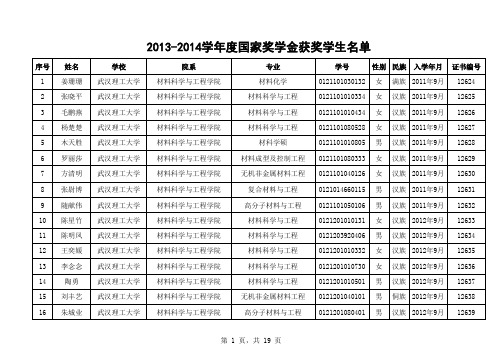
2013-2014学年度国家奖学金获奖学生名单
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 姓名 姜珊珊 张晓平 毛鹏燕 杨楚楚 木天胜 罗丽莎 方清明 张尉博 随献伟 陈星竹 陈明凤 王奕媛 李念念 陶勇 刘丰艺 朱城业 学校 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 武汉理工大学 院系 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 材料科学与工程学院 专业 材料化学 材料科学与工程 材料科学与工程 材料科学与工程 材科学硕 材料成型及控制工程 无机非金属材料工程 复合材料与工程 高分子材料与工程 材料科学与工程 材料科学与工程 材料科学与工程 材料科学与工程 材料科学与工程 无机非金属材料工程 高分子材料与工程 学号 0121101030132 0121101010334 0121101010434 0121101080528 0121101010805 0121101080333 0121101040126 0121014660115 0121101050106 0121201010131 0121203920406 0121201010332 0121201010730 0121201010501 0121201040101 0121201080401 性别 民族 女 女 女 女 男 女 女 男 男 女 男 女 女 男 男 男 入学年月 证书编号 12624 12625 12626 12627 12628 12629 12630 12631 12632 12633 12634 12635 12636 12637 12638 12639 满族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2011年9月 汉族 2012年9月 汉族 2012年9月 汉族 2012年9月 汉族 2012年9月 汉族 2012年9月 侗族 2012年9月 汉族 2012年9月
信号与信息处理学科 - 清华大学电子工程系

现代雷达信号处理、高速DSP系统设计与应用
信息认知与智能系统研究所
2014-11-17
一、学科介绍
二级:信号处理方法与技术
三级:
国家自然 科学基金 委员会信 息科学部
信息一处: 电子学与 信息系统
1、图像处理
研究方向
信号处理方法与技术
三级:
3、多媒体信息处理 人脸跟踪
信号处理方法与技术
三级: 4、探测与成像系统
信息认知与智能系统研究所
2014-11-17
信息认知与智能系统研究所
2014-11-17
信号处理方法与技术
三级: 4、探测与成像系统
信号处理方法与技术
三级:
4、探测与成像系统
27张人体 头部MRI 2-D图象
2014-11-17
一、学科介绍
信息获取、变换、存储、传输、交换、应用等 环节中的信号与信 息的处理
集信息采集、处理、加工、传播等多学科为一体
实时信号与信息处理 语音与图像处理 现代传感与测量技术 信息系统与信息安全 智能信息处理
信息认知与智能系统研究所
2014-11-17
一、学科介绍
信息认知与智能系统研究所
2014-11-17
信息认知与智能系统研究所
2014-11-17
5
信号处理方法与技术
三级: 5、智能信息处理
2014-11-17
信号处理方法与技术
三级: 5、智能信息处理
信息认知与智能系统研究所
2014-11-17
信息认知与智能系统研究所
2014-11-17
国家科学技术奖励工作办公室刘凤霞女士在第三届欧维姆预应力技术奖颁奖典礼上的讲话
为我 国预应力技术应用与发展做 出了重要贡献 。 东南大学是 我 国最早开展 预应力 技术研究 与 推广应 用 的单 位之一 ,三 +年来 ,在 与柳州0 M V
公 司密 切合作 过程 中 ,多方 面得到0 M公 司的支 V 持与 帮助 ,我们相信 ,随着 东南大学 与O M公 司 V 产学研 合作 的深入 ,必定 会使我 国预应 力技术水 平再 上一 个新 的 台阶 。 祝各 位 与会代 表身体 健康 ,工 作顺 利 。
设 奖奖 项 ,依 据 登 记 内容 ,该 奖 设 立 的 目的是
o
改健姆疲末NO)01 首 届 J lS  ̄ G——— T CO Y2 0. RT IS HL ( EE _ = 《 技末》 0 第 名 ∞1 瑚总 3 年 第B 期 专集 致磷 . 餐馆 — 竺
P S RE
柳 州欧维 姆机械 股份有 限公 司不仅 为 国内外 用户 提供技 术先进 和质 量可靠 的预应 力工 程用产 品,而且密切注意与从事预应力技术研究 ,预应力 工程设计 及施工单位的合作 ,推动产业技术进步 ,
东南 大学华东 预应力 技术联合 开发 中心主任
国家科学技术奖励工作办公室刘凤霞女士在
改儋姆ETHLY2 首届 专集 改辞. P姆疲COG E 疲术 坛 S N坛( E 改RTS采语O ̄ D 儋 RS 论 , 餐信 —
— —
.
墨
蔓 几天前 ,集 团在北京 宝马会 上专 门召开 了关 于集 团发 展 规划 的新 闻发 布 会 ,根 据 规 划 ,到 “ 二 五 ”末 整 个 集 团要 实 现 销售 收入 1 0 亿 十 00 元 。柳工集 团对 柳州欧 维姆 机械股 份有 限公 司的
中国工程 院院士 东南 大学学 术委 员会 主任 吕志涛 东 南大 学土 木工程 学 院院长 吴 刚
nobel prize physics 2013 -回复

nobel prize physics 2013 -回复什么是诺贝尔物理学奖?诺贝尔物理学奖是一个由瑞典皇家科学院每年颁发的国际奖项,用于对在物理学领域做出重要贡献的个人或团体进行表彰。
自1901年创立以来,诺贝尔物理学奖奖励了众多杰出的科学家,他们通过对自然界的深入研究,推动了人类对物质和能量的理解。
因此,这个奖项被认为是物理学界的最高荣誉之一。
在2013年,诺贝尔物理学奖颁发给了两个具有里程碑意义的科学发现。
由皇家科学院宣布的这两项发现是关于粒子物理学的研究,其中一个是关于被称为“印子粒子”的玻色子的直接证据,另一个是关于粒子质量起源的理论贡献。
以下将逐步介绍这两项重要发现,并解释它们为物理学的发展带来的重要意义。
首先,我们来介绍关于印子粒子的发现。
印子又被称为希格斯玻色子,是一种带有自旋零的基本粒子,在标准模型中被认为是赋予其他基本粒子质量的粒子。
长期以来,科学家们一直设想存在这样一种粒子,并在大型强子对撞机(LHC)等加速器中进行颗粒间的碰撞实验来寻找它。
然而,直到2012年,才有了强有力的证据支持印子粒子的存在。
两个实验组在LHC 上独立进行的大量碰撞实验中,最终成功探测到印子粒子的存在,这项发现成为了官方颁发诺贝尔物理学奖的原因之一。
探测到印子粒子的发现对于物理学的发展具有重要意义。
首先,它验证了标准模型中质量生成机制的预测,这一机制被称为希格斯机制。
希格斯机制揭示了粒子获得质量的源头,即相互作用于希格斯场中的粒子会获得质量。
其次,这个发现也为解释物质构成提供了更深入的理解,因为印子粒子对于构成我们周围物质的基本粒子质量至关重要。
最后,通过对印子粒子的进一步研究,科学家们可能能够揭示物理学中其他未知粒子的存在和特性,从而进一步推进对宇宙起源和组成的认识。
同时,2013年的诺贝尔物理学奖还表彰了对粒子质量起源理论的重要贡献。
弗朗索瓦·恩格勒特和彼得·希金斯两位科学家的独立理论预测成为了寻找印子粒子的关键。
践行社会责任欧维姆清华大学颁奖——2013年清华大学欧维姆奖学金颁奖典礼暨学术报告会在清华大学举行

P RE S T RE SS T EC HN OL OGY
《 最左 技 末 》 2 o 1 4 年 第1 期 总 第1 o 2 期
要程 度高 ,设计 时对建 筑物 结构 耐久 陛分析是 十 分 必要 的 。
倒虹吸抗腐蚀设计中,为同类水工建筑正处在 工业 转型升 级 、加 快发 展
会责任 ,表达对莘莘学子的关爱 ,鼓励他们健康 成长为社会的有用之才 ,国家的栋梁之才。 清华大学土木水利学院副院长宋二祥首先致 辞, 他表示 ,柳州欧维姆不仅在行业发展中声誉 很高 ,而且一直关心社会 , 关注教育的发展 ,在 物质上、更在精神上激励学生们 ,使他们认识、 体会到社会对他们的关心和爱护 ,及身上肩负的 责任。今后清华大学土木系在努力培养品学兼优
参考文献
【 1 】 水工混凝 土结构设计规 范 S L1 9 1 — 2 0 0 8 .
( 2 ) 从腐蚀机理分析得出 ,对处于地下腐 蚀环境的水工建筑物 ,通过阻断腐蚀性地下水对 混凝土和钢筋侵蚀通道方式,有效地提高结构的
耐久性 。基于此 , 将裂缝控制等级为一级的预应
力结构和真空辅助灌浆技术运用到南水北调大型
维姆加强合作 ,共同促进预应力技术人才的培育 及 预应 力技术 的发展 。 接下来 ,董事长郑 津发表 了热情洋溢 的讲
话 。郑董说 : “ 在 中 国改 革开放 的3 0 多年 里 ,国
有企业的稳步提升 ,外资企业的加入 ,民营企业 的壮大 ,铸就 了中国经济 的高速发展 。与此同 时,越来越多的优秀企业为传递社会正能量而关 注可持续发展 ,关注社会责任。企业社会责任是 科 学发展 的实 际行 动 ,是 构建美 丽 中国的必然 要 求 ,是提升企业竞争力 、促进可持续发展的重要 途径。中国企业社会责任是一个正在发展 中的生 态 ,政府 、企业、媒体 、社会组织等各个方面的 合力正在经历一个积累量变 、等待质变的社会进 程 。以标准化的行为方式 ,以地球村的可持续发
ASLA金质奖章获得者爱德华·斯通先生到清华大学演讲
品 质 , 发 集 约 型 生 态 环 境 的要 求 , 开 中水 利 用 具 有 巨 大 潜 力 和 多层 面 的 意 义 。 本 项 目 由 多 工 种 配 合 综 合 研 究 完 成 , 计 具 有 很 强 的 挑 战性 , 效 果 和 效 益 的 设 其 预 设 有待 项 目实 际 建成 后 的 测试 和检 验 。
爱 德 华 ・ 通 先 生 曾被 美 国 约 翰 逊 总 统 、 斯 尼
克松总统及卡特总统连聘为园林顾问。1 9 9 4年,
斯 通 被 美 国 风 景 园 林 师 协 会 授 予 A L 金 质 奖 SA
章, 以表彰其对风景 园林行业的突出贡献和 巨大
推 动 。 这也 是 规 划 及 风景 园林 行业 的最 高 荣誉 。 ※ 本 刊 供 稿
的回归。
特征 , 有不可替代 的景观效果。在 条件 允许 的情况 具
下 ,住 区景 观应 该 采 用 人 工 化 与 自然 格 调 相 辅 的形 式 , 用 湖水水 面升 降 , 造一 种动 态的景 观效 果。 利 制 第三 , 水利用设计 的形式应有利于 促进水体流动 、 中 维 持 水 体 自净 能 力 。 通 过 对 旅 顺 龙 河 家 园 的 中 水 利 用 环 境 设 计 可 以 看 出 ,住 宅 建 筑 面 积 在 1 .5万 mz 右 的 小 区 , 89 左 杂 排 水 经 处理 后 日出 中水 可 达 4 6 ,约 2 .t万 mz 8t 56/ 。 如 果 景 观 水 池 平 均 深 度 取 04 m ,则 每 万 平 方 米 住 .5 宅 每 日产 出 的 中 水 , 满 足 5 .m2 观 水 池 的 用 水 可 69 景 量 。 由此 可 以推 算 出 , 3~5万 mz 筑 面 积 的小 区在 建 中 水 应 用 方 面 可 以做 出 1 0~2 0 大 小 的水 景 , 5 5 m2 是 比较 适 宜 的规 模 , 可 以 形 成 足 够 的 水 体 面 积 和 景 观 序 列 。假 设 水 池 水 两 天 一换 , 其 中一 天 的 水 可 以用 则 于 灌 溉 , 当于 小 区 绿 地 每 天 降 水 5 相 mm( 绿 地 率 设 为 5 % )实 际 上 灌 溉 不 会 全 部 用 完 , 下 的 可 用 于 0 , 余 洗 车 、 洁 , 至 出售 等 , 成 本 上 也 可 以达 到 投 入 清 甚 在 与 收 益目由大连方天建筑设计工程 有限公司和东北 建筑设计 院澳连设计所合作设计。
第三届欧维姆预应力技术奖颁奖典礼在柳州举行

( 0 0首 届 )在广 西柳 州市广 西工学 院 国际学 2 l.
术 报 告厅 举 办 ,来 自国 内外 的 ] 0 5 多位 知名 专家 和代表汇聚一 堂 ,共 同就 当前 工程技术界普遍 关 心 的工程 结构安全 与耐久 的问题进 行 了广泛交 流 与深入研讨 ,会议取得 了丰硕 的成 果。大会共 收 到论文3 篇 ,出版论文专集 一部 。在上 午的主报 9
奖代表 了 国内预应 力行业 的先进水平 ,是对 国家 科 技奖励 工作体 系的支持 。希 望基金会在今 后的 工作 中积极 组织 、引导广大预应 力行业 的科技 工
作 者提高 自主创 新能力 ,在预应 力技术研究 、社
桥 》、 《 国家体育馆双向张弦空间网格结构设 计 》两个项 目 荣获一等奖 ; 《 天津市海河桥梁
2 0年 1 月 2 t 欧 维 姆 技 术 论 坛 1 0 1 E , 6
告会上 有 6 位专 家做 了主题报 告 ,在下 午的 自由
论 坛上有 6 位专 家 做 了专题 发言 。许 多专 家代 表 在 会 上 各 抒 已见 ,畅所 欲 言 ,提 出 了许 多 独 特
的见解 和 主张 。
项 目一 富民桥工 程 》等 四个 项 目荣 获二 等奖 ; 《 州市 江 东大 桥 及接 线 工程 》等 六个 项 目荣 杭
获三 等奖 。 10 5 多位 与会代 表见 证 了这令人 激 动
的 时刻 。
会 公益性技术 研究等方 面取得更 大成绩 ,将欧维 姆 预应 力技术 奖办成具有 高质量 和广泛影响力 的
2 1  ̄ 1月2 日上 午 ,詹 天佑 基金会 欧维 姆 00 6 1 热 烈祝贺 。她说 ,欧维姆 预应力技 术奖是经科技 部批 准的全 国性社 会力量设 奖奖项 ,评 出 的科技
第30届全国青少年信息学奥林匹克竞赛NOI2013获奖名单

第30届全国青少年信息学奥林匹克竞赛NOI2013获奖名单
7月14日——20日在成都电子科技大学举行的第30届全国青少年信息学奥林匹克竞赛NOI2013已降下帷幕,本届NOI共决出一等奖52名(分数线373)、二等奖48名(分数线339)、三等奖114名(分数线245)。
按有关规则:获得一等奖的52名选手将进入新一届信息学国家集训队,向他们表示祝贺!
在新一届信息国家集训队中,浙江13人,江苏7人,湖南、福建各5人,安徽、广东各4人,天津、四川各3人,辽宁、山东各2人,湖北、北京、重庆、河北各1人。
目前NOI2013获奖名单已公布,详情如下:
CCF NOI2013获奖名单。
首届欧维姆技术论坛在柳州成功举办

理龙跃 和 中交。
热 点 问题 进 行 深 入 探讨 ,为 提高 结 构 安 全 和 耐
交 流 ,使 会 议 取 得 了丰硕 的成 果 。大会 共 收到
论 文 3 篇 ,出版 论 文专 集 一 部 。在 上午 的 主报 9
告 会 上有 6 专 家做 了 主题报 告 ,在 下午 的 自由 位
交通 厅公路 规划勘 察设计 研究 院总工 庄卫林 ,国 家科 学技术 奖励工 作办公 室刘 风霞 女士 ,总参工
欢 姆 论 ( .届 专 — 坛 道 垄 塾 生 篁 体 蒿 坛, 7首 集 报 — 塑 垄 疲 术 2 了 论 D D 蔓型 翌
首 届 欧维 姆 技 术论 坛 在 柳 州 成 功举 办
2 1年 1月 2 00 1 6日,广西 工 学 院 国际 学 术报 告 厅 座 无 虚 席 ,气 氛 热 烈 ,欧 维 姆 技 术 论 坛 ( 0 0首届 )暨詹天佑 基金会 欧维姆 预应力技术 21. 发 展 专 项 基 金 第 三届 欧维 姆 预 应 力 技 术 奖 颁 奖 典 礼在 此 隆重 举行 ,来 自国内外 的 1 0 5 多位 知名 专 家 、学 者 和代 表 参 加 了论 坛 。 中国 工 程 院 院 士 、中 国土 木 工程 学 会 桥 梁 及 结 构 工 程 分 会理 事 长项海 帆 ,中国工程 院院 士 、广 西 区科协 主席 久 提供 有 价 值 的意 见 和建 议 。论 坛 必 将 为 推 动 我 国工 程技术 的进 步和相关 产业 的发展做 出应有
程兵科 研三 所总工 刘玉堂 ,广西 工学 院副 院长李 利 军等 出席论 坛并 在大会 主 席 台就座 。 王柳 平副市 长代表柳 州市 政府 向 出席这 次活
韦明俊老师事迹

韦明俊老师事迹
韦明俊老师是一位备受尊重和敬爱的教育家。
他出生于1949年,毕业于清华大学,并在美国哈佛大学获得了博士学位。
他曾担任过北
京大学副校长、中国教育部部长等职务,是中国教育改革和发展的重
要推动者之一。
韦明俊老师一直致力于推动中国高等教育的国际化和现代化,他
提倡学术自由、知识开放和学科交叉,鼓励学生勇于探索和实践。
他
发起了“全国大学生英语竞赛”和“全国高校信息素养大赛”,促进
了学生素质的全面提高。
韦明俊老师在担任教育部部长期间,推出了一系列教育改革和发
展的举措,如“211工程”、“985工程”等,大力推进高等教育内涵
建设和质量提升。
他还提出了“终身学习”、“双一流”等重要概念,引领了中国高等教育的发展方向。
韦明俊老师是一位深明大义的教育家,他对教育的追求和热爱深
深感染着每一个受到他影响的人。
他的事迹和贡献将永远铭刻在中国
教育发展的历史中。
来自清华学子的感谢信

传 至锚 固区 ,如此将获 得更大 的技 术经济效 果 。
参考文献
【] 1
[1 2
bat gA .I: rce igo t nen t n l o ges n lsi [] n Poedn f hItrai a C nrs n 8 o o R c ca is ] oy , 19 :6 - 7 . okMehnc[ .T k o 9 56 5 60 C
个社 会 和 国家 ,都是裨 益无穷 的 。” ( 编辑 部 )
鼓励 。他 们对欧维姆公 司对教 育事业 的热忱支持
( 上接 第3 页 ) 5 锚 固区深度 ,对此 还应深 入研究 。
E poi s n lsn eerhC. SnDeo airi, xls e d atgR sac[] a i ,C lona v a B i g f
PSE HLY RTSENO E SCOG RT
《 左 技 术》 oo 期总 8 21 年第1 第7期
来 自清 华学 子 的感 谢信
“‘ 欧维姆 奖学金 ’的设立 ,反 映 了贵公 司
和 无 私 奉 献表 示 衷 心 的感 谢 和 赞 赏 ,并纷 纷 表
对当代大学生的关心和关爱 ,是对我们的学习、
已颁发 4 ,有两习和工作 中,我会 继续坚持 刻 苦钻研 ,对 自己严 格要求 ,争 取精益求 精 ,牢记
‘ 自强不 息 ,厚德 载物 ’的校训 ,以期 取得更好
的成绩 ,回报贵公 司的关心 和支持 ,并 为祖 国的
建 设事业 作 出 自己的贡献 。”
科 研 、工作 以及生活 的鼓 励 和支 持 ,展示 了贵公
司 良好 的社会 责任感 。” “ 您们 对大学生 教育 的无私奉 献一定会 盛开
ProfessionalSummary职业概述

Professional SummaryDarren Dawson∙Education:Ph.D., Electrical Engineering, Georgia Institute of Technology, 1990B.S., Electrical Engineering, Highest Honors, Georgia Institute of Technology, 1984∙Work Experience:Westinghouse, Bettis Atomic Power Laboratory, Electrical Engineer, 1985-1987Georgia Institute of Technology, School of Electrical Engineering, Graduate Research Assistant and Post-Doctoral Research, 1987-1990.Clemson University, Department of Electrical and Computer EngineeringAssistant Professor - 1990, Associate Professor - 1993, Professor – 1996, ECE Chair - 2007∙Prestigious Honors:i)Office of Naval Research Young Investigator Awardee, ii)National Science Foundation Young Investigator Awardee, iii)McQueen Quattlebaum Faculty Achievement Awardee, iv)Georgia Institute of Technology Council of Outstanding Young Engineering Alumni, v)Provost’s Award for Scholarly Achievement, and vi) Alumni Award for Outstanding Achievement in Research (For a complete list of honors see full resume).∙Research Publication Activities: Research has culminated in over 190 journal papers, over 325 conference papers, nine books, and five book chapters which, as of 2013, have resulted in a total of over 6000 citations and an H-index of 38 according to Google Scholar.∙Graduate Student Advisement:Supervisor of 34 Ph.D. students and 53 M.S. thesis students.∙Professional Recognition: i) Invited addresses at over ten universities, and ii) twenty invited presentations at national and international conferences.∙Research and Teaching Funding:PI, Co-PI, Co-In of over 20 million dollars of funded activity from federal, state, and industrial sources (Estimated Expenditures of over $5M for Dr. Dawson).∙Participation in Professional Societies:i) Over 325 Faculty/Graduate Student Conference Presentations, ii)Over 20 Faculty/Graduate Student Invited Conference Presentations, iii) Co-Chaired and organized seven conference sessions at national and international conferences, and iv) Served on four program committees for international conferences.∙Editorial Service:i)Associate Editor, Automatica, The International Federation of Automatic Control (IFAC) Journal, 1992 –1996, and ii)Associate Editor, IEEE Transactions on Control Systems Technology, 1997 – 2002.∙Service to Professional, Public, and Private Sectors: i) Reviewer for over 15 journals and two book publishers, ii) Served on several NSF review panels, iii) Performed several book reviews for journal publications.Contributions to Control EngineeringLeadership in Academic Research: For two decades, Dawson has been developing rigorous solutions for numerous open problems associated with important and/or benchmark nonlinear control applications in practically important areas such as motion control, motor control, robotics, and mechanical system control. His work in these areas have resulted in a total of over 6000 citations and an H-index of 38 according to Google Scholar.One of the hallmarks of his work has been the implementation and validation of controllers for a variety of electromechanical systems. His leadership in his field is attested by his scholarship and the recognition of his work by top awards from his university, the NSF, and ONR. Dawson has served as the primary advisor of 34 completed Ph.D. dissertations and 53 completed master's theses. Many of his former graduate students are leaders at corporations such General Electric, Texas Instruments, Lucent, Boeing, Scientific Research, Intel, BF Goodrich, etc. In addition, his Ph.D. students received academic appointments as follows: J. Carroll - Clarkson University, M. Bridges - University of Michigan, T. Burg - Clemson University, M. Queiroz - Louisiana State University, H. Canbolat - Mersin University, P. Aquino - Centro Federal de Educacaçao Tecnológica, M. Feemster - Naval Academy, W. Dixon - University of Florida, E. Zergeroglu - Gebze Institute of Technology, A. Behal - University of Central Florida, Y. Fang - Nankai University, X. Bin - Tian Jin University, M. McIntyre - Western Kentucky University, M. Salah - Hashemite University, and E. Tatlicioglu - Izmir Institute of Technology.At the Forefront of Electromechanical Control Design:Dawson was the first scholar to design a control theoretic, nonlinear adaptive position tracking controller for induction motors that compensates for unknown rotor resistance effects without measuring rotor flux (see Automatica Vol. 32, No 8. pp. 1127-1143, 1996). In addition, he illustrated how a nonlinear control scheme could be designed and analyzed to facilitate the practical use of induction motors as actuators for robot manipulators(See journal paper #1 in Part 2). His work in generalized mechanical systems (see journal paper #3 in Part 2) is often cited by other researchers as being the first paper to present a global adaptive output feedback tracking control solution for a general class of Lagrange Euler systems. He was also the first scholar to design, analyze, and implement a rigorously developed nonlinear algorithm for the important application area of sensorless control of induction motors (see journal paper #7 in Part 2). His work in underactuated systems (see his research monograph Nonlinear Control of Wheeled Mobile Robots, 2001) is recognized by other researchers as being one of the earliest solutions to the tracking control problem for systems with nonintegrable dynamics. Dawson’s contributions, which are at the forefront of his field, have also illustrated in a novel fashion how Lyapunov-based control design tools (e.g., integrator backstepping, boundary control, nonlinear observer/filter design) can be handcrafted to attack difficult nonlinear control applications involving modeling uncertainty or a lack of state measurements. For example, he designed a novel nonlinear filter to facilitate a global result in journal paper #3 in Part 2; furthermore, he illustrated how a dynamic oscillator technique used for induction motors could be redesigned to solve the underactuated mechanical system tracking problem addressed in his research monograph Nonlinear Control of Wheeled Mobile Robots, 2001. The theoretical and practical importance of his research has also been established by numerous research grants and contracts from federal agencies and industrial firms (e.g., Honda, Westinghouse, Sauer-Danfoss, Union Camp, etc.).Experimental Validation of Controller Performance: Dawson’s research is notable in that the performance gains associated with his control theoretic work has been verified experimentally by his research group (See the research monograph’s #1 a nd #2 in Part 1). Dawson’s other important contributions include: i) design, analysis, and implementation of nonlinear control schemes for mobile robotic systems (see his research monograph Nonlinear Control of Wheeled Mobile Robots, 2001), ii) design of a broad class of boundary controllers for regulating the vibration of many types of mechanical systems (see the research monograph #2 in Part 1), iii) synthesis of novel visual servo controllers and vision-based estimators (see journal paper #4 in Part 2), iv) design, analysis, and implementation of novel adaptive controllers for compensating for frictional effects, v) development of real-time MATLAB based software control education (see his journal paper in the IEEE Transactions on Education, Vol. 45, No. 3, pp. 218-226, August 2002), and vi) development of real-time QNX-based software for control research (see his paper in the IEEE Control Systems Magazine, Vol. 22, No. 3, pp. 12-26, June, 2002).Major Accomplishments as a ScholarPART 1 – Selected Books (Boldface co-authors denote students of Dawson)1. D. Dawson, J. Hu, and T. Burg, Nonlinear Control of Electric Machinery, Marcel Dekker,1998, ISBN 0-8247-0180-1.This 437-page monograph presents Professor Dawson’s research from 1991-1998 in the field of nonlinear control design and analysis for electric machines. Specifically, this book presents the mathematical foundation for designing feedback/feedforward algorithms that account for the nonlinearities and modeling uncertainties associated with controlling mechanical systems driven by electric machines.2.M. de Queiroz, D. Dawson, S. Nagarkatti, and F. Zhang, Lyapunov-Based Control ofMechanical Systems, Birkhauser, 1999, ISBN 0-8176-4086-X.This 316-page monograph presents Professor Dawson’s research from 1994-1999 in the field of nonlinear control design and analysis for mechanical systems. This book illustrates, in a unified framework, how Lyapunov-based techniques can be applied to a variety of control problems that can be modeled by ordinary and/or partial differential equations.3.W. Dixon, A. Behal, D. Dawson, and S. Nagarkatti, Nonlinear Control of EngineeringSystems: A Lyapunov-Based Approach, Birkhäuser, 2003, ISBN 0-8176-4265-X.This 394-page monograph presents Professor Dawson’s research from 1987-2003 in the field of nonlinear control design and analysis for a variety of systems (e.g. mechanical, electrical, robotic, aerospace, and underactuated systems). This book provides a practical yet rigorous development of nonlinear Lyapunov-based tools and their use in the solution of control-theoretic problems.PART 2 – Selected Journal Papers (Boldface co-authors denote students of Dawson) Nonlinear Control of Mechanical Systems1.T. Burg, D. Dawson, J. Hu, and M. de Queiroz, “An Adaptive Partial State Fee dbackController for RLED Robot Manipulators”, IEEE Transactions on Automatic Control, Vol.41, No. 7, pp. 1024-1031, July, 1996.One of the first controllers designed for the full order Rigid-Link Electrically-Driven (RLED) robot model. The controller was designed to adapt for parametric uncertainty in the electromechanical dynamics while utilizing a novel dynamic filter to eliminate the need for velocity measurements.2.M. de Queiroz, D. Dawson, M. Agarwal, and F. Zhang, “Adaptive Nonlinear BoundaryContr ol of a Flexible Link Robot Arm”, IEEE Transactions on Robotics and Automation, Vol. 15, No. 4, Aug., 1999, pp. 779-787.The paper blended nonlinear, adaptive ordinary differential equation control techniques with partial differential equation boundary control techniques to deal with parametric uncertainty.The approach was novel because, to the best of our knowledge, this was the first controller to compensate for unknown payload mass based on an infinite dimensional model of flexible link robots.3.F. Zhang, D. Dawson, M. de Queiroz, and W. Dixon, “Global Adaptive Output FeedbackTracking Control of Robot Manipulators”, IEEE Transactions on Automatic Control, Vol.45, No. 6, June 2000, pp. 1203-1208.This paper presented a global, adaptive, OFB tracking controller for uncertain robot manipulators. To the best of our knowledge, this result constituted the first global tracking result for this important nonlinear dynamical system.4.J. Chen, D. M. Dawson, W. E. Dixon, and A. Behal, “Adaptive Homography-Based VisualServo Tracking for Fixed and Camera-in-Hand Configurations,” IEEE Transactions on Control Systems Technology, Vol. 13, No. 5, pp. 814-825, Sept. 2005.This paper represented one of the first approaches with regard to blending a Lyapunov-based approach with projective homography tools for visual servoing. The controller was novel since it was the first approach to actively compensate for the lack of unknown depth measurements and unknown object model parameters.Nonlinear Control of Electric Machines5. D. Dawson, J. Carroll, and M. Schneider, “Integrator Backstepping Control for a Brush dcMotor Turning a Robotic Load”, IEEE Transactions on Controls Systems Technology, Vol.2, No. 3, Sept., 1994, pp. 233-244.One of the first papers to experimentally illustrate the performance gains that can be achieved using the integrator backstepping technique with regard to adaptive and robust nonlinear controllers for electromechanical systems.6.M. de Queiroz and D. Dawson, “Nonlinear Control of Active Magnetic Be arings: ABackstepping Approach”, IEEE Transactions on Control Systems Technology, Vol. 4, No. 5, Sept., 1996, pp. 545-552.To the best of our knowledge, this paper presented the first singularity-free, tracking controller for the third order, nonlinear model of an active magnetic bearing system. This result was achieved by a novel commutation strategy for switching the electrical currents.7.M. Feemster, P. Aquino, D. Dawson, and A. Behal, “Sensorless Rotor Velocity TrackingControl for Induction Motors,”IEEE Transactions on Control System Technology, Vol. 9, No. 4, pp. 645-653, July, 2001.In this paper, we presented one of the first sensorless observer/control algorithm that rigorously achieved semi-global exponential rotor velocity for the full-order nonlinear system induction motor model (i.e., only stator current measurements were required). Experimental results validated the performance of the sensorless controller.8. A. Behal, M. Feemster, and D. Dawson, “An Improved Indirect Field Oriented Control lerfor the Induction Motor”, IEEE Transactions on Control Systems Technology, Vol. 11, No. 2, pp. 248-252, March 2003.One of the first papers that illustrated how the standard indirect field-oriented controller can be modified using Lyapunov tools to design an adaptive controller to compensate for parametric uncertainty associated with the mechanical load.Nonlinear Control for General Classes of Systems9. B. Xian, D.M. Dawson, M. de Queiroz, and J. Chen, “A Continuous Asymptotic TrackingControl Strategy for Uncertain Nonlinear Systems”, IEEE Trans. on Automatic Control, Vol.49, No. 7, pp. 1206-1211, July 2004.This paper presented a tracking controller for a class of uncertain, high-order, MIMO nonlinear systems which includes time-varying and nonlinearly parameterized systems. A novel continuous control strategy was used to ensure semi-global asymptotic tracking under limited restrictions on the uncertain nonlinearities.10.J. Chen, A. Behal, and D. M. Dawson, “Robust Feedback Control for a Class of Uncer tainMIMO Nonlinear Systems”, IEEE Transactions on Automatic Control, Vol. 53, No. 2, pp.591-596, Mar. 2008.This paper presented an output feedback tracking controller for a broad class of uncertain MIMO nonlinear systems using a high gain observer.。
北京理工大学2013年度LMS奖学金颁奖典礼顺利举行

程
2 0 1 3丘
O r g a n i z e - - - + Mo v e将 得 到 的 新 单 元 移 动 到 原 来 的
Co l l e c t o r中 .
’ ¨ME, Kl MG, Fn a me, Ex t , Di r .
( 2)GU I :Ma i n Me n u—}P r e p r o c e s s o r—}L o a d s
( F r o m S o u r c e ) .
使用 F 2 一E l e m s —B y C o n i f g - - * T r i a 3或者 Q u a d 4 就 可删 除三 角形或 四边 形 的面单 元 .
6 Hy p e r Me s h 3 D 网格 划 分 中, 如 何 区别 S o l i d
9 如何在 AN S Y S中考 虑结构 自重 问题?
成体 网格 , 单 元 的法 向作 为偏 移 的方 向.
7 A NS YS耦 合场分 析
在 结构 分 析 中 , 如何 模 拟结 构 白重 和 设 备质 量
是 经常 遇 到 的 问 题 , 可通 过 P r e p r o c e s s o r  ̄L 0 a f i s —
Ma p, Li n e a r S o l i d和 E l e me n t Of fs e t ?
对 于不 同类 型 的耦 合场 分析 , 上述 命 令在 具 体 使 用 中可能不 尽相 同.
8 如何在 A NS YS耦 合 场 分 析 中用 函数 施 加 温 度 载荷 ? 在 P a r a m e t e r s -  ̄ F u n c t i o n s - - - -  ̄ D e i f n e / E d i t , 编 辑 完
2013清华大学工商管理案例大赛,调研成夺魁关键

2013清华大学工商管理案例大赛,调研成夺魁关键
佚名
【期刊名称】《师资建设》
【年(卷),期】2014(000)002
【摘要】2013年12月15同,清华大学工商管理案例大赛决赛在清华大学展开,来自全校各院系通过初赛的14个代表队,围绕工商管理案例进行了激烈的思想与智慧火花的碰撞,最终来自经营学院的DI&DJ队获得比赛第一名。
【总页数】1页(P9-9)
【正文语种】中文
【中图分类】G649.28
【相关文献】
1.践行社会责任欧维姆清华大学颁奖——2013年清华大学欧维姆奖学金颁奖典礼暨学术报告会在清华大学举行 [J], 谢慧芳;
2.关于举办“首届中国财务管理案例大赛之财务分析人机大赛”的通知 [J],
3.关于“首届中国财务管理案例大赛之财务分析人机大赛”延期结赛的通知 [J],
4.“未来计算”——清华大学“计算机学科发展战略研讨暨科研成果汇报会”在清华大学举办 [J],
5.2013中国管理案例年会暨麦克法兰案例教学研讨课在清华大学举行 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
缔造更安全、更高效的动力系统

54 科学中国人 2020年12月创新之路Way of Innovation缔造更安全、更高效的动力系统——记北京理工大学机械与车辆学院博士生导师王恩华 梁佳欢随着中国社会经济发展向更高质量转型升级,绿色、可持续和节能减排等核心技术支撑点亦上升到国家战略的高度。
从我国来看,节能减排技术研发工作仍十分艰巨,尤其是在交通行业占有非常重要的位置;从国际上看,国际海事组织多年前提出的能效设计指数(E E D I)计划,在2020年和2025年将新设计船舶的E E D I分别提高20%和30%。
对此,北京理工大学机械与车辆学院预聘副教授、特别研究员、博士生导师王恩华指出:“目前船舶动力系统大部分是中低速柴油机,能效在50%以下,剩下的余热能通过排气、进气中冷、冷却液和润滑油等被浪费。
船舶动力系统在航行时基本处于稳态工况,采用有机朗肯循环回收这部分余热可明显提高系统能效,降低污染物排放。
”其实,不仅是在船舶节能方面,多年来,王恩华的研究方向主要还聚焦在中低温动力循环系统、内燃机热流体流动与燃烧模拟,以及新能源车用动力系统性能研究,其应用领域十分广泛,对提高我国的能源利用效率、实现节能减排目标、促进社会可持续发展具有重要的意义。
学海泛舟,乘风破浪1995年,18岁的王恩华以湖北省鄂州市高考状元的成绩考入了清华大学汽车工程系汽车工程专业。
“当时我对专业的了解不多,但我有一个表哥在清华,他学的是汽车。
在1995年,大家觉得随着经济发展,汽车在未来会有大发展,这个专业可以大施拳脚。
而且,我父母也认为‘学门手艺’找工作更方便。
综合这些考虑,我就报了汽车工程专业。
”王恩华笑道。
“当时,我的班主任帮我争取了一个湖北省建设银行设立的奖学金。
因为那时汽车工程是五年制专业,所以奖学金一共资助了五年。
这笔奖学金对我的帮助很大,要不然我的大学生活可能没有那么顺利。
”王恩华十分感谢曾经帮助过他的人。
身为农村孩子,王恩华在乡下度过了小学和初中时代。