matlab仿真报告
线性系统理论Matlab实践仿真报告
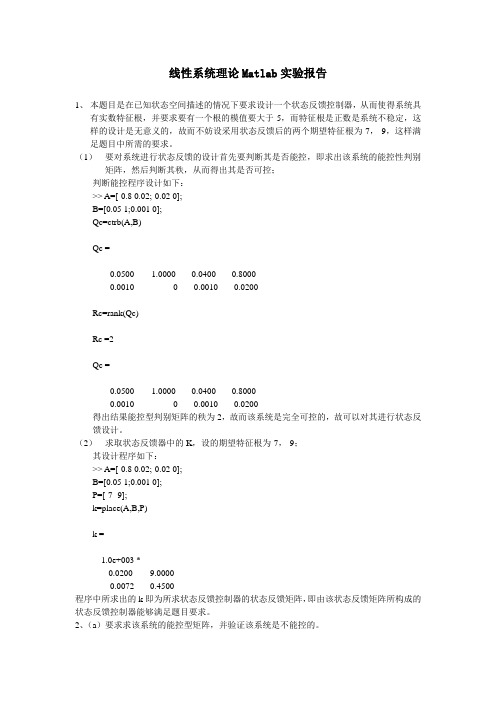
线性系统理论Matlab实验报告1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。
(1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控;判断能控程序设计如下:>> A=[-0.8 0.02;-0.02 0];B=[0.05 1;0.001 0];Qc=ctrb(A,B)Qc =0.0500 1.0000 -0.0400 -0.80000.0010 0 -0.0010 -0.0200Rc=rank(Qc)Rc =2Qc =0.0500 1.0000 -0.0400 -0.80000.0010 0 -0.0010 -0.0200得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。
(2)求取状态反馈器中的K,设的期望特征根为-7,-9;其设计程序如下:>> A=[-0.8 0.02;-0.02 0];B=[0.05 1;0.001 0];P=[-7 -9];k=place(A,B,P)k =1.0e+003 *-0.0200 9.00000.0072 -0.4500程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。
2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
设计程序:>> A=[0 1 0 0 0;-0.1 -0.5 0 0 0;0.5 0 0 0 0;0 0 10 0 0;0.5 1 0 0 0];>> B=[0;1;0;0;0];>> C=[0 0 0 1 0];>> Qc=ctrb(A,B)Qc =0 1.0000 -0.5000 0.1500 -0.02501.0000 -0.5000 0.1500 -0.0250 -0.00250 0 0.5000 -0.2500 0.07500 0 0 5.0000 -2.50000 1.0000 0 -0.1000 0.0500>> Rc=rank(Qc)Rc =4从程序运行的结果可得,系统能控型判别矩阵的秩为4,而系统为5阶系统,故而就验证了该系统为不可控的。
matlab软件仿真实验(信号与系统)(1)
matlab软件仿真实验(信号与系统)(1)《信号与系统实验报告》学院:信息科学与⼯程学院专业:物联⽹⼯程姓名:学号:⽬录实验⼀、MATLAB 基本应⽤实验⼆信号的时域表⽰实验三、连续信号卷积实验四、典型周期信号的频谱表⽰实验五、傅⽴叶变换性质研究实验六、抽样定理与信号恢复实验⼀MATLAB 基本应⽤⼀、实验⽬的:学习MATLAB的基本⽤法,了解 MATLAB 的⽬录结构和基本功能以及MATLAB在信号与系统中的应⽤。
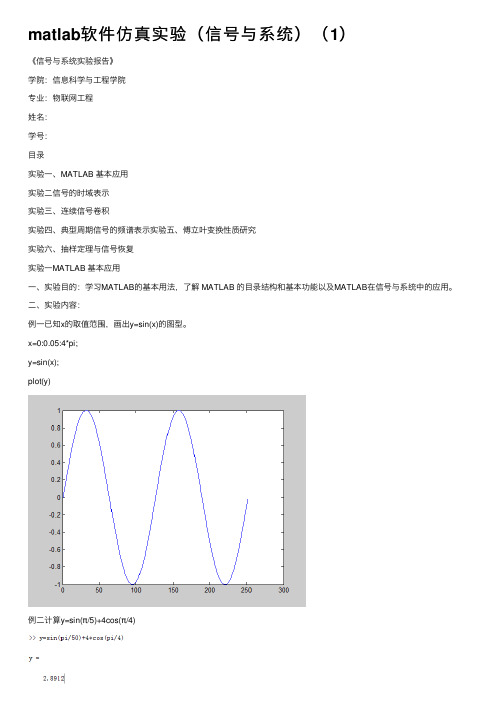
⼆、实验内容:例⼀已知x的取值范围,画出y=sin(x)的图型。
x=0:0.05:4*pi;y=sin(x);plot(y)例⼆计算y=sin(π/5)+4cos(π/4)例三已知z 取值范围,x=sin(z);y=cos(z);画三维图形。
z=0:pi/50:10*pi;x=sin(z);y=cos(z);plot3(x,y,z)xlabel('x')ylabel('y')zlabel('z')例四已知x的取值范围,⽤subplot函数绘图。
参考程序:x=0:0.05:7;y1=sin(x);y2=1.5*cos(x);y3=sin(2*x);y4=5*cos(2*x);subplot(2,2,1),plot(x,y1),title('sin(x)')subplot(2,2,2),plot(x,y2),title('1.5*cos(x)')subplot(2,2,3),plot(x,y3),title('sin(2*x)')subplot(2,2,4),plot(x,y4),title('5*cos(2*x)')连续信号的MATLAB表⽰1、指数信号:指数信号Ae at在MATLAB中可⽤exp函数表⽰,其调⽤形式为:y=A*exp(a*t) (例取 A=1,a=-0.4)参考程序:A=1;a=-0.4;t=0:0.01:10;ft=A*exp(a*t);plot(t,ft);grid on;2、正弦信号:正弦信号Acos(w0t+?)和Asin(w0t+?)分别由函数cos和sin表⽰,其调⽤形式为:A*cos(w0t+phi) ;A*sin(w0t+phi) (例取A=1,w0=2π,?=π/6) 参考程序:A=1;w0=2*pi; phi=pi/6; t=0:0.001:8;ft=A*sin(w0*t+phi);plot(t,ft);grid on ;3、抽样函数:抽样函数Sa(t)在MATLAB中⽤sinc函数表⽰,其定义为:sinc(t)=sin(πt)/( πt)其调⽤形式为:y=sinc(t)参考程序:t=-3*pi:pi/100:3*pi;ft=sinc(t/pi);plot(t,ft);grid on;4、矩形脉冲信号:在MATLAB中⽤rectpuls函数来表⽰,其调⽤形式为:y=rectpuls(t,width),⽤以产⽣⼀个幅值为1,宽度为width,相对于t=0点左右对称的矩形波信号,该函数的横坐标范围由向量t决定,是以t=0为中⼼向左右各展开width/2的范围,width的默认值为1。
MATLAB系统仿真报告——有阻尼受迫振动系统
dx dt
Kx
F0
sin
wt
(2)
(2)式是一个线性非齐次方程。令B/M = 2n(n为阻尼系数)),K/M= wn2 ( wn
n 为固有振动频率),ξ = wn 为相对阻尼系数或阻尼比,则(2)式可写为:
dx 2 dt 2
2n
dx dt
wn2 x
h sin( wt )
(3)
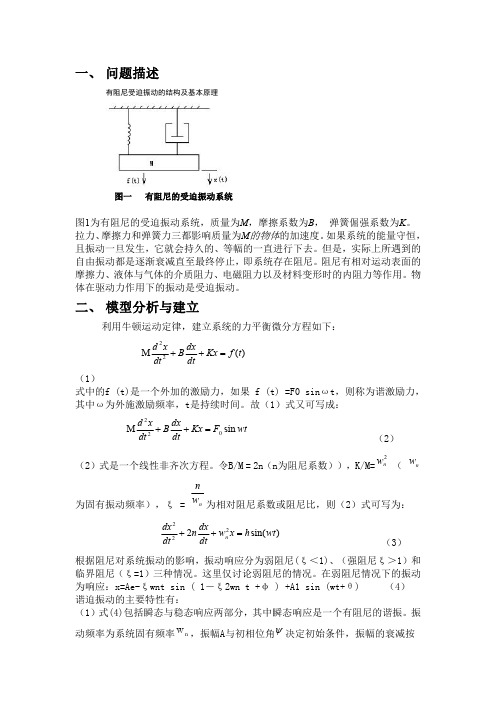
根据阻尼对系统振动的影响,振动响应分为弱阻尼(ξ<1)、(强阻尼ξ>1)和 临界阻尼(ξ=1)三种情况。这里仅讨论弱阻尼的情况。在弱阻尼情况下的振动 为响应:x=Ae-ξwnt sin ( 1-ξ2wn t +φ ) +A1 sin (wt+θ) (4) 谐迫振动的主要特性有: (1)式(4)包括瞬态与稳态响应两部分,其中瞬态响应是一个有阻尼的谐振。振
0
0
50
100
15
20
25
184.
184.
184.
184.
184.
184.
18
185.
185.
185.
有图可以看出盐水浓度达到 0.2 kg / m 3 ,需要 184.82 分钟。
2、 脚本文件的方法: t=0:250; v1=6; v2=4; c1=0.5; c2=0.2; c=(2+3*t)./(2000+6*t); plot(t,c); xlabel('t'); ylabel('C'); title('浓度随时间的变化曲线'); grid on
入响应并画出波形。(1 用 simlink 的方法,2 用脚本文件的方法)
matlab电路仿真报告
matlab电路仿真报告一. 仿真背景和目的在电路设计和验证过程中,电路仿真技术是非常重要的。
Matlab这一强大的仿真软件,可快速有效地在仿真环境中进行电路设计验证,确保电路设计在实际应用中的可靠性和稳定性。
二. 仿真内容介绍本次仿真实验主要涉及四个方面的内容:交流电路、直流电路、半导体器件、功率放大器。
1. 交流电路仿真交流电路仿真是电路设计的基础。
本次仿真实验中,我们构建了简单的交流电路,通过仿真计算得到了交流电流、交流电压以及电路功率等参数。
2. 直流电路仿真直流电路仿真实验中,我们建立了稳定的直流电源和直流电路,在仿真环境中模拟了直流电路的工作状态,包括电流、电压、功率等参数。
通过仿真结果可以得到直流电路的性能评估。
3. 半导体器件仿真半导体器件在现代电子电路中广泛应用。
本次仿真中,我们针对开关电路的应用设计了半导体管,通过仿真计算得到了开关电路在不同工作状态下的输出特性,包括开关电压、开通电流等。
4. 功率放大器仿真功率放大器是实际应用中常见的一种电路结构。
仿真实验中,我们设计了基本的功率放大器电路,在仿真环境中计算得到了频率响应、增益、输出功率等参数,用于评估该功率放大器的性能和稳定性。
三. 仿真结果分析通过仿真计算和实验结果分析,可以得出以下几点结论:1. 交流电路仿真结果表明,输入交流电源的电流和电压随时间变化而变化,同时可以计算得到电路的功率和电阻等参数。
2. 直流电路仿真结果表明,直流电路的电流和电压稳定,可以计算得到直流电路的电流、电压和功率等参数。
3. 半导体器件仿真结果表明,半导体器件可以有效地用于开关电路应用,可以计算得到器件的开通电流、开关电压等参数。
4. 功率放大器仿真结果表明,功率放大器可以在一定的频率范围内实现较大的增益和输出功率。
同时,该电路还具有一定的稳定性和可靠性。
四. 总结和展望通过对电路仿真实验的分析和总结,我们可以发现,电路仿真技术在电路设计和验证过程中具有不可替代的作用。
自动实验一——典型环节的MATLAB仿真 报告
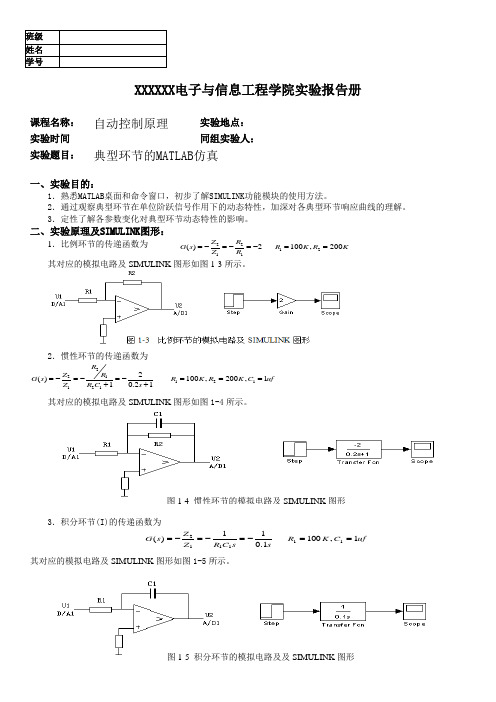
班级 姓名 学号XXXXXX 电子与信息工程学院实验报告册课程名称:自动控制原理 实验地点: 实验时间同组实验人: 实验题目: 典型环节的MATLAB 仿真一、实验目的:1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验原理及SIMULINK 图形:1.比例环节的传递函数为 221211()2100,200Z R G s R K R K Z R =-=-=-==其对应的模拟电路及SIMULINK 图形如图1-3所示。
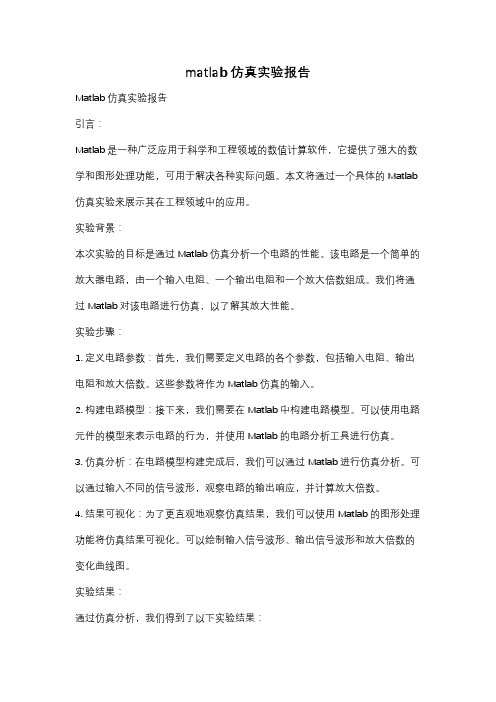
2.惯性环节的传递函数为2211211212()100,200,110.21R Z R G s R K R K C uf Z R C s =-=-=-===++其对应的模拟电路及SIMULINK 图形如图1-4所示。
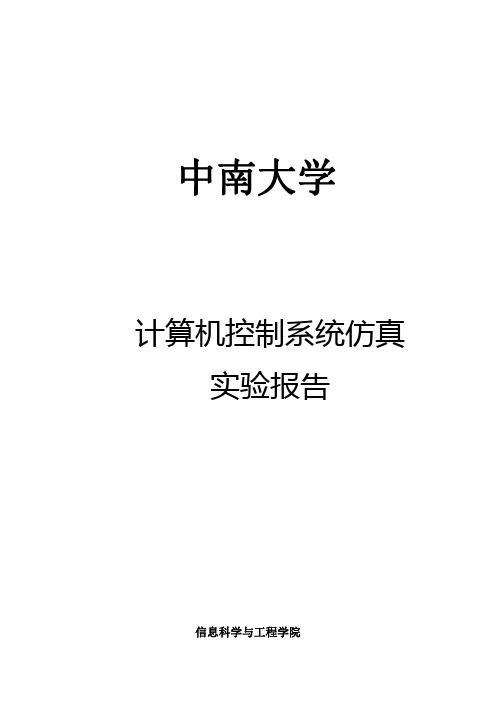
3.积分环节(I)的传递函数为uf C K R s s C R Z Z s G 1,1001.011)(111112==-=-=-=其对应的模拟电路及SIMULINK 图形如图1-5所示。
图1-5 积分环节的模拟电路及及SIMULINK 图形 图1-4 惯性环节的模拟电路及SIMULINK 图形4.微分环节(D)的传递函数为uf C K R s s C R Z Z s G 10,100)(111112==-=-=-= uf C C 01.012=<<其对应的模拟电路及SIMULINK 图形如图1-6所示。
5.比例+微分环节(PD )的传递函数为)11.0()1()(111212+-=+-=-=s s C R R R Z Z s G uf C C uf C K R R 01.010,10012121=<<=== 其对应的模拟电路及SIMULINK 图形如图1-7所示。
6.比例+积分环节(PI )的传递函数为)11(1)(11212s R s C R Z Z s G +-=+-=-= uf C K R R 10,100121===其对应的模拟电路及SIMULINK 图形如图1-8所示。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
matlab仿真实验报告
matlab仿真实验报告Matlab仿真实验报告引言:Matlab是一种广泛应用于科学和工程领域的数值计算软件,它提供了强大的数学和图形处理功能,可用于解决各种实际问题。
本文将通过一个具体的Matlab 仿真实验来展示其在工程领域中的应用。
实验背景:本次实验的目标是通过Matlab仿真分析一个电路的性能。
该电路是一个简单的放大器电路,由一个输入电阻、一个输出电阻和一个放大倍数组成。
我们将通过Matlab对该电路进行仿真,以了解其放大性能。
实验步骤:1. 定义电路参数:首先,我们需要定义电路的各个参数,包括输入电阻、输出电阻和放大倍数。
这些参数将作为Matlab仿真的输入。
2. 构建电路模型:接下来,我们需要在Matlab中构建电路模型。
可以使用电路元件的模型来表示电路的行为,并使用Matlab的电路分析工具进行仿真。
3. 仿真分析:在电路模型构建完成后,我们可以通过Matlab进行仿真分析。
可以通过输入不同的信号波形,观察电路的输出响应,并计算放大倍数。
4. 结果可视化:为了更直观地观察仿真结果,我们可以使用Matlab的图形处理功能将仿真结果可视化。
可以绘制输入信号波形、输出信号波形和放大倍数的变化曲线图。
实验结果:通过仿真分析,我们得到了以下实验结果:1. 输入信号波形与输出信号波形的对比图:通过绘制输入信号波形和输出信号波形的变化曲线,我们可以观察到电路的放大效果。
可以看到输出信号的幅度大于输入信号,说明电路具有放大功能。
2. 放大倍数的计算结果:通过对输出信号和输入信号的幅度进行计算,我们可以得到电路的放大倍数。
通过比较不同输入信号幅度下的输出信号幅度,可以得到放大倍数的变化情况。
讨论与分析:通过对实验结果的讨论和分析,我们可以得出以下结论:1. 电路的放大性能:根据实验结果,我们可以评估电路的放大性能。
通过观察输出信号的幅度和输入信号的幅度之间的比值,可以判断电路的放大效果是否符合设计要求。
基于MATLAB控制系统仿真实验报告
tf 4
y0
0 1
6、求出 G1(s)
2 (s2 2s 1) 与 G2 (s)
1 (2s3
3s2
1)
的单位阶跃响应,并分别
求出状态空间模型。
解:(1) G1(s) 2 (s2 2s 1) 的状态空间模型求解如下:
function shiyan2 b1=[2];
D(z)
0.62(1 0.136z 1)(1 0.183z (1 0.045z 1)(1 0.53z 1)
1 )
分别用仿真算法得到系统在单位阶跃输入作用下的响应,系统在单位速度输
入是的输出响应。
解:(1)首先将 W1(s)转换为 W1(z),采样周期 T=0.2s,程序清单如下: function shiyan42 num=[10];den=[0.005 0.15 1 0]; ts=0.2;[nc,dc]=c2dm(num,den,ts)
INTRO(注意:intro 为一个用 MATLAB 语言编写的幻灯片程序,主要演示
常用的 MATLAB 语句运行结果。)
然后,根据现实出来的幻灯片右面按钮进行操作,可按 START——NEXT—
—NEXT 按钮一步步运行,观察。
3、自编程序并完成上机编辑,调试,运行,存盘:
(1)用 MATLAB 命令完成矩阵的各种运算,例如:
5、利用 ode23 或 ode45 求解线性时不变系统微分方程 y(t) Ay(t) ,并绘制出 y(t)
曲线,式中
A
0.5
1
1 0.5
t t0 t 如下: function xdot=fun21(t,x) A=[-0.5 1;-1 -0.5]; xdot=A*x; function fzsy22 t0=0;tf=4;tol=1e-6; x0=[0;1];trace=1; [t,x]=ode23('fun21',t0,tf,x0,tol,trace); plot(t,x) 得到的实验结果如下图所示:
matlab simulink仿真实验报告
matlab simulink仿真实验报告[Abstract]本篇报告介绍了一项利用Matlab和Simulink进行仿真实验的过程和结果。
实验主要涉及对加速度计数据的滤波和降噪处理,以及利用观测器估计一个非线性系统的状态变量。
本文介绍了实验设计的思路和步骤,详细讲解了实验中所使用到的算法和模型,并对实验结果进行了分析和总结。
[Keywords][Introduction]在自动化控制、机器人技术、航天航空、汽车电子等领域中,传感器和估计器是广泛应用的两类算法。
传感器可以测量物理量,如位置、速度、加速度等,并将其转化为电信号输出。
估计器则通过对物理模型的建模和输出信号的处理,来推测和估计系统的状态变量。
加速度计可以测量物体在三个轴向上的加速度,同时可以进行数据滤波和降噪。
估计器可以用于非线性系统的状态估计,具有广泛的应用前景。
[Simulation Process]1. 数据采集处理加速度计可以用于测量物体在三个轴向上的加速度。
由于传感器的噪声和误差,采集的数据往往不够准确和稳定,需要通过滤波和降噪等算法进行处理。
本实验中采用了常用的Butterworth低通滤波器和移动平均滤波器来对加速度计数据进行处理。
Butterworth低通滤波器是一种线性相位滤波器,可以将高频信号滤去,降低信号噪声。
在Matlab中,可以通过函数[b,a] = butter(n,Wn,'low')生成Butterworth低通滤波器。
其中,n为滤波器的阶数,Wn为截止频率。
移动平均滤波器是一种简单有效的滤波方法,可以对信号进行平均处理,消除信号的高频成分和噪声。
在Matlab中,可以通过函数smooth(x,n)生成移动平均滤波器。
其中,x为待处理的信号,n为滤波器窗口大小。
2. 状态估计模型状态估计模型是一种建立在数学模型基础上的估计方法,常常用于非线性系统的状态估计。
本实验中,给定了以下非线性系统的模型:$$\begin{cases}x_{1}' = x_{2} \cos(x_{1}) \\x_{2}'= u\end{cases}$$其中,x1和x2为系统状态变量,u为系统的控制输入。
MATLABSimulink和控制系统仿真实验报告
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
自动实验一——典型环节的MATLAB仿真报告

自动实验一——典型环节的MATLAB仿真报告引言:典型环节的MATLAB仿真是一种常见的模拟实验方法,通过使用MATLAB软件进行建模和仿真,可以有效地研究和分析各种复杂的物理系统和控制系统。
本报告将介绍一个典型环节的MATLAB仿真实验,包括实验目的、实验原理、实验步骤、实验结果和讨论等内容。
一、实验目的本实验旨在通过MATLAB仿真实验,研究和分析一个典型环节的动态特性,深入了解其响应规律和控制方法,为实际系统的设计和优化提供理论支持。
二、实验原理典型环节是控制系统中的重要组成部分,一般包括惯性环节、惯性耦合和纯滞后等。
在本实验中,我们将重点研究一个惯性环节。
惯性环节是一种常见的动态系统,其特点是系统具有自身的动态惯性,对输入信号的响应具有一定的滞后效应,并且在输入信号发生变化时有一定的惯性。
三、实验步骤1.建立典型环节的数学模型。
根据实际情况,我们可以选择不同的数学模型描述典型环节的动态特性。
在本实验中,我们选择使用一阶惯性环节的传递函数模型进行仿真。
2.编写MATLAB程序进行仿真。
利用MATLAB软件的控制系统工具箱,我们可以方便地建立惯性环节的模型,并利用系统仿真和分析工具进行仿真实验和结果分析。
3.进行仿真实验。
选择合适的输入信号和参数设置,进行仿真实验,并记录仿真结果。
4.分析实验结果。
根据仿真结果,可以分析典型环节的动态响应特性,比较不同输入信号和控制方法对系统响应的影响。
四、实验结果和讨论通过以上步骤,我们成功地完成了典型环节的MATLAB仿真实验,并获得了仿真结果。
通过对仿真结果的分析,我们可以得到以下结论:1.惯性环节的响应规律。
惯性环节的响应具有一定的滞后效应,并且对输入信号的变化具有一定的惯性。
随着输入信号的变化速度增加,惯性环节的响应时间呈指数级减小。
2.稳态误差与控制增益的关系。
控制增益对稳态误差有重要影响,适当调整控制增益可以减小稳态误差。
3.不同输入信号的影响。
自动控制原理MATLAB仿真实验报告

实验一 典型环节的MATLAB 仿真 一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验内容① 比例环节1)(1=s G 和2)(1=s G ;Simulink 图形实现:示波器显示结果:② 惯性环节11)(1+=s s G 和15.01)(2+=s s GSimulink 图形实现:示波器显示结果:③ 积分环节s s G 1)(1Simulink 图形实现:示波器显示结果:④ 微分环节s s G )(1Simulink 图形实现:波器显示结果:⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G1)、G1(s )=s+2Simulink 图形实现:示波器显示结果:2)、G2(s)=s+1 Simulink图形实现:示波器显示结果:⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+=1)、G1(1)=1+1/sSimulink 图形实现:示波器显示结果:2)G2(s)=1+1/2s Simulink图形实现:示波器显示结果:三、心得体会通过这次实验我学到了很多,对课本内容加深了理解,熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法,加深对各典型环节响应曲线的理解,这为对课程的学习打下了一定基础。
实验二线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和nω对二阶系统性能的影响。
3.熟练掌握系统的稳定性的判断方法。
二、实验内容1.观察函数step( )的调用格式,假设系统的传递函数模型为243237()4641s s G s s s s s ++=++++绘制出系统的阶跃响应曲线?2.对典型二阶系统222()2n n n G s s s ωζωω=++1)分别绘出2(/)n rad s ω=,ζ分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数ζ对系统的影响,并计算ζ=0.25时的时域性能指标,,,,p r p s ss t t t e σ。
matlab与通信仿真实验报告
matlab与通信仿真实验报告《Matlab与通信仿真实验报告》摘要:本实验报告通过使用Matlab软件进行通信仿真实验,对通信系统的性能进行了评估和分析。
首先介绍了通信系统的基本原理和模型,然后利用Matlab软件搭建了通信系统的仿真模型,并进行了实验验证。
通过实验结果的分析,得出了通信系统的性能指标,为通信系统的设计和优化提供了重要参考。
一、引言通信系统是现代信息社会中不可或缺的基础设施,它承载着各种类型的信息传输和交换。
通信系统的性能直接影响着信息传输的质量和效率,因此对通信系统的性能评估和分析具有重要意义。
Matlab软件是一种功能强大的科学计算软件,它提供了丰富的工具和函数库,可以用于通信系统的建模、仿真和分析。
本实验报告将利用Matlab软件进行通信系统的仿真实验,对通信系统的性能进行评估和分析。
二、通信系统的基本原理和模型通信系统由发送端、信道和接收端组成,发送端将信息转换成电信号发送出去,经过信道传输后,接收端将电信号转换成信息。
通信系统的性能评估主要包括信号传输质量、误码率、信噪比等指标。
在本实验中,我们将以常见的调制解调技术为例,建立通信系统的仿真模型。
三、Matlab软件在通信系统仿真中的应用Matlab软件提供了丰富的工具和函数库,可以用于通信系统的建模、仿真和分析。
在本实验中,我们将利用Matlab软件搭建通信系统的仿真模型,包括信号调制、信道传输、信号解调等过程。
通过Matlab软件的仿真实验,我们可以得到通信系统的性能指标,如误码率、信噪比等。
四、实验结果分析通过Matlab软件进行通信系统的仿真实验,我们得到了一系列实验结果。
通过对实验结果的分析,我们可以评估通信系统的性能,比如误码率随信噪比的变化规律、不同调制方式的性能比较等。
这些实验结果对于通信系统的设计和优化具有重要的参考价值。
五、结论本实验报告利用Matlab软件进行通信系统的仿真实验,对通信系统的性能进行了评估和分析。
matlab实验报告
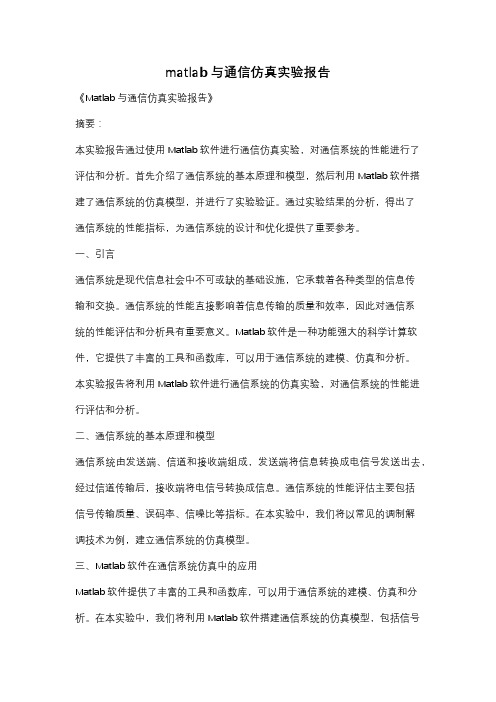
实验仿真一:控制系统中的MATLAB编程应用已知单位负反馈的开环传递函数为:G(s)=ωξω(1)假设自然频率ω给定,取五个不同的阻尼比ξ。
试用MATLAB编程,在同一张图中绘制其单位阶跃响应曲线,并分析阻尼比对二阶动态系统的影响。
取ω=2,ξ=0.25, 0.5, 1,2,4由开环传递函数求出闭环传递函数:G(s)=ωξωω将数据带入闭环传递函数得:G(s)=,ξ则随着ξ的值变化,绘制的曲线将不同。
写入MATLAB程序如下:clearclcnum=4;den1=[1 1 4];sys1=tf(num,den1);den2=[1 2 4];sys2=tf(num,den2);den3=[1 4 4];sys3=tf(num,den3);den4=[1 8 4];sys4=tf(num,den4);den5=[1 16 4];sys5=tf(num,den5);step(sys1,'b-',sys2,'g-',sys3,'r-',sys4,'c-',sys5,'y-',20);图1-1 阻尼比不同的单位阶跃响应曲线图阻尼比对二阶动态系统的影响:随着阻尼比ξ的增大,系统超调量逐渐减小。
当阻尼比大于1时,系统响应曲线为单调曲线,已经没有振荡了。
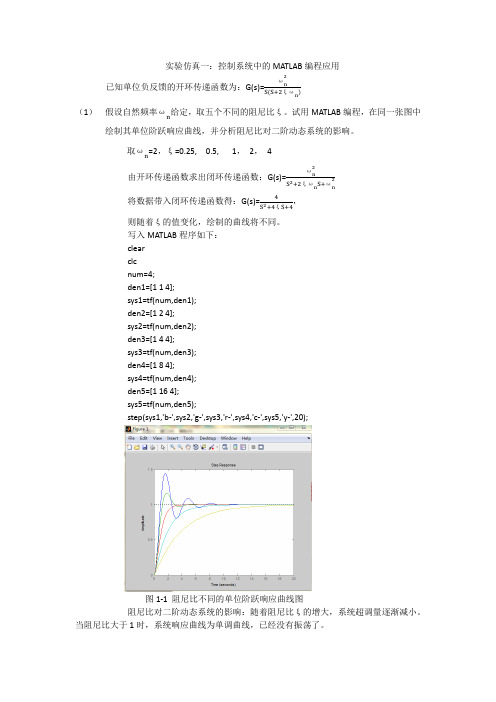
(2)假设阻尼比ξ给定,取五个不同的自然频率ω。
试用MATLAB编程,在同一张图中绘制其单位阶跃响应曲线,并分析自然频率对二阶动态系统的影响。
取ξ=0.5,ω=0.5,1,2,3, 4将数据带入闭环传递函数得:G(s)=ω,ωω则随着ω的值变化,绘制的曲线将不同写入MATLAB程序如下:clearclcnum1=0.25;den1=[1 0.5 0.25];sys1=tf(num1,den1);num2=1;den2=[1 1 1];sys2=tf(num2,den2);num3=4;den3=[1 2 4];sys3=tf(num3,den3);num4=9;den4=[1 3 9];sys4=tf(num4,den4);num5=16;den5=[1 4 16];sys5=tf(num5,den5);step(sys1,'b-',sys2,'g-',sys3,'r-',sys4,'c-',sys5,'y-',20);图1-2 自然频率不同的单位阶跃响应曲线图自然频率对二阶动态系统的影响:随着自然频率的增加,系统的响应速度加快,而响应曲线的峰值保持不变。
matlab仿真课程设计报告
matlab仿真课程设计报告一、教学目标本课程的教学目标旨在通过MATLAB仿真技术的学习,使学生掌握MATLAB基本操作、仿真环境搭建、脚本编写及图形用户界面设计等技能,培养学生运用MATLAB解决实际问题的能力。
具体目标如下:1.知识目标:–理解MATLAB的系统结构及基本功能;–掌握MATLAB基本语法、数据类型、矩阵运算;–熟悉MATLAB仿真环境及相关工具箱;–了解MATLAB在工程领域的应用。
2.技能目标:–能够独立搭建简单的仿真环境;–能够运用MATLAB进行数据分析、算法实现;–具备编写MATLAB脚本及图形用户界面的能力;–能够运用MATLAB解决实际工程问题。
3.情感态度价值观目标:–培养学生的创新意识、团队协作精神及自主学习能力;–使学生认识到MATLAB在工程领域的重要性,提高学习兴趣;–培养学生运用所学知识解决实际问题的责任感。
二、教学内容本课程的教学内容主要包括MATLAB基础知识、MATLAB仿真环境及工具箱、脚本编写及图形用户界面设计等。
具体安排如下:1.MATLAB基础知识:–MATLAB概述及系统结构;–MATLAB基本语法、数据类型、矩阵运算。
2.MATLAB仿真环境及工具箱:–MATLAB仿真环境搭建;–MATLAB常用工具箱介绍,如控制系统、信号处理、图像处理等。
3.脚本编写及图形用户界面设计:–MATLAB脚本编写方法及技巧;–MATLAB图形用户界面设计原理及实例。
4.MATLAB在工程领域的应用:–利用MATLAB解决实际工程问题案例分析。
三、教学方法本课程采用讲授法、案例分析法、实验法等多种教学方法相结合,以激发学生的学习兴趣和主动性。
具体方法如下:1.讲授法:通过讲解MATLAB的基本概念、语法及应用,使学生掌握课程基本知识。
2.案例分析法:分析实际工程案例,让学生了解MATLAB在工程领域的应用,提高学生解决实际问题的能力。
3.实验法:安排适量实验,让学生动手操作,培养学生的实际操作能力和创新能力。
MATLAB控制系统仿真实验报告
清华大学自动化工程学院实验报告课程:控制系统仿真专业自动化班级 122姓名学号指导教师:时间: 2015 年 10 月 19 日— 10 月 28 日目录实验一 MATLAB环境的熟悉与基本运算 (1)实验二 MATLAB语言的程序设计 (6)实验三 MATLAB的图形绘制 (9)实验四采用SIMULINK的系统仿真 (14)实验五控制系统的频域与时域分析 (17)实验六控制系统PID校正器设计法 (23)实验一 MATLAB环境的熟悉与基本运算一、实验时间及地点:实验时间:2015.10.19上午8:30—9:30实验地点:计算中心二、实验目的:1.熟悉MATLAB开发环境2.掌握矩阵、变量、表达式的各种基本运算三、实验内容:1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符)2、启动MATLAB6.5,将该文件夹添加到MATLAB路径管理器中。
3、保存,关闭对话框4、学习使用help命令,例如在命令窗口输入help eye,然后根据帮助说明,学习使用指令eye(其它不会用的指令,依照此方法类推)5、学习使用clc、clear,观察command window、command history和workspace等窗口的变化结果。
6、初步程序的编写练习,新建M-file,保存(自己设定文件名,例如exerc1、exerc2、exerc3……),学习使用MATLAB的基本运算符、数组寻访指令、标准数组生成函数和数组操作函数。
注意:每一次M-file的修改后,都要存盘。
练习A:(1)help rand,然后随机生成一个2×6的数组,观察command window、command history和workspace等窗口的变化结果(2)学习使用clc、clear,了解其功能和作用(3)输入一个2维数值数组,体会标点符号的作用(空格和逗号的作用)。
(4)一维数组的创建和寻访,创建一个一维数组(1×8)X,查询X数组的第2个元素,查询X数组的第3个元素到第6个元素,查询X数组的第5个元素到最后一个元素,查询X数组的第3、2、1个元素,查询X数组中≤5元素,将X数组的第2个元素重新赋值为111,实例expm1。
MATLABsimulink系统仿真分析仿真报告
仿真报告课程名称:自动化技术导论报告题目:MATLAB/simulink系统仿真分析班级姓名学号xxxxxx自动化学院2016年4月软件版本:MATLAB R2010bMATLAB强处理能力MATLAB是一个包含大量计算算法的集合。
其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。
函数中所使用的算法都是科研和工程计算中的最新研究成果,而且经过了各种优化和容错处理。
在通常情况下,可以用它来代替底层编程语言,如C和C++ 。
在计算要求相同的情况下,使用MATLAB的编程工作量会大大减少。
MATLAB的这些函数集包括从最简单最基本的函数到诸如矩阵,特征向量、快速傅立叶变换的复杂函数。
函数所能解决的问题其大致包括矩阵运算和线性方程组的求解、微分方程及偏微分方程的组的求解、符号运算、傅立叶变换和数据的统计分析、工程中的优化问题、稀疏矩阵运算、复数的各种运算、三角函数和其他初等数学运算、多维数组操作以及建模动态仿真等。
MATLAB图形处理MATLAB自产生之日起就具有方便的数据可视化功能,以将向量和矩阵用图形表现出来,并且可以对图形进行标注和打印。
高层次的作图包括二维和三维的可视化、图象处理、动画和表达式作图。
可用于科学计算和工程绘图。
新版本的MATLAB 对整个图形处理功能作了很大的改进和完善,使它不仅在一般数据可视化软件都具有的功能(例如二维曲线和三维曲面的绘制和处理等)方面更加完善,而且对于一些其他软件所没有的功能(例如图形的光照处理、色度处理以及四维数据的表现等),MATLAB同样表现了出色的处理能力。
同时对一些特殊的可视化要求,例如图形对话等,MATLAB也有相应的功能函数,保证了用户不同层次的要求。
另外新版本的MATLAB还着重在图形用户界面(GUI)的制作上作了很大的改善,对这方面有特殊要求的用户也可以得到满足。
MATLAB对许多专门的领域都开发了功能强大的模块集和工具箱。
塔里木大学MATLAB及仿真应用实验报告8
2.了解Simulink的各个模块。
实验结果分析
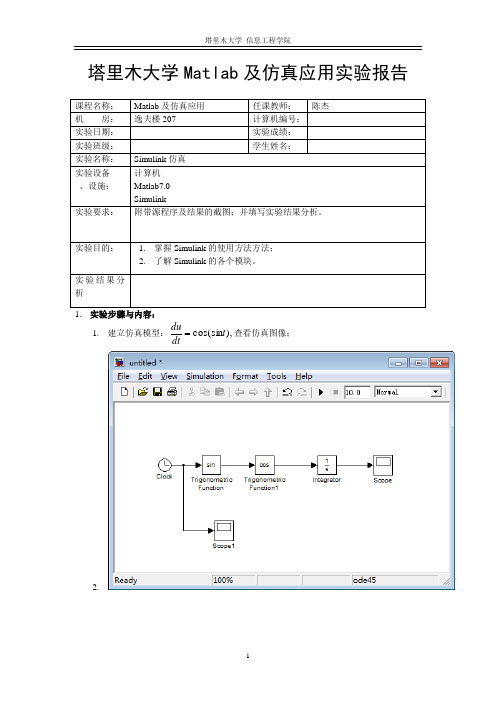
1.实验步骤与内容:
1.建立仿真模型: 查看仿真图像;
2.
3.
4.
2.用一个示波器同时显示多个仿真结果:
3.利用simulink仿真 。
4.产生一个高度为1,宽度为4,延时为4秒的矩形脉冲信号
5.系统的微分方程为 ,其中u(t)是幅度为1,角频率为1rad/s的方波输入信号,试建立simulink模型并仿真;
塔里木大学Matlab及仿真应用实验报告
课程名称:
Matlab及仿真应用
任课教师:
陈杰
机房:
逸夫楼207
计算机编号:
实验日:
实验成绩:
实验班级:
学生姓名:
实验名称:
Simulink仿真
实验设备
、设施:
计算机
Matlab7.0
Simulink
实验要求:
附带源程序及结果的截图;并填写实验结果分析。
实验目的:
6.
7.一系统如下图所示:其中 , ,系统的输入信号为 ,用simulink求取系统输出相应,并将输入输出信号对比显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)根據數學模型建立計算機仿真模型(編程) 計算機仿真就是對數學模型的數值求解。我們將微分方程進行形式上的 變換以便於數值 求解。由(1.2)和(1.3)式得 v(t+ dt) =v(t) + dv=v(t) +adt (1.9) 和 s(t+ dt) =s(t) + ds=s(t) +v(t)dt (1.10) 注意,這種變形僅僅是將方程轉換為一種在自變量(時間)上的「遞 推」表達式,並沒有進行 解析求解。利用(1.9)和(1.10),在已知當前時刻t 的瞬時位移,瞬 時速度和加速度的情況下,我們就可以推知下一個無限鄰近的時刻t+ dt 上物體新的瞬時位移,瞬時速度和加速度,這也就是微分方程數值求解 的基本思想。在數值求解中,無窮小量dt 需要用一個很小的數量¢t來近 似,¢t 稱為微分方程的數值求解步長,通常也稱為仿真步進。顯然,這 種微分方程的遞推求解總是近似的,求解精度與步長有關。下面我們就 用程序來實現這個求解過程。仿真時間範圍設置為0到2秒,為了使得仿 真計算的誤差明顯一些,我們故意採用了較大的仿真步長¢t = 0:1。讀者 可以自己修改仿真步長來觀察計算精度的變化情況。我們將瞬時位移作 為仿真輸出變量,並同時通過(1.8)式計算出解析結果以相互對照。 (4)執行仿真和結果分析 g=9.8; % 重力加速度 v=0; % 設定初始速度條件 s=0; % 設定初始位移條件 t=0; % 設定起始時間 dt=0.1; % 設置計算步長 N=20; % 設置仿真遞推次數. 仿真時間等於N與dt的乘積 for k=1:N v=v+g*dt; % 計算新時刻的速度 s(k+1)=s(k)+v*dt; % 新位移 t(k+1)=t(k)+dt; % 時間更新
畫」仿真的效果。當然,這樣是以犧牲計算速度為代價的。修改後的程 序文件代碼如下。 〔程序代碼〕ch1example1prg2.m % ch1example1prg2.m g=9.8; % 重力加速度 for L=1:5 % 仿真重複5次以便於觀察 v=0; % 初始速度 s=0; % 初始位置 t=0; dt=0.01;% 計算步長 for k=1:200 v=v+g*dt; % 速度 s=s+v*dt; % 位移 t=t+dt; % 時間 plot(0,-s,'o'); axis([-2 2 -20 0]); % 坐標範圍固定 text(0.5,-1,['当前时间:t=',num2str(t)]); text(0.5,-2,['当前速度:v=',num2str(v)]); text(0.5,-3,['当前位置:s=',num2str(s)]); set(gcf,'DoubleBuffer','on');% 雙緩衝避免作圖閃爍 drawnow; % 立即作圖 end end 在程序中,計算步進重新設置為0:01,並且重複仿真多次以便於演示。 在作圖語句之後設 置了固定的顯示坐標範圍,並通過text語句在圖上動態顯示當前計算時 刻的結果值。語句 set(gcf,'DoubleBuffer','on'); 將顯示設備雙緩衝開啟,以避免屏幕刷新引起的閃爍。而 drawnow 是立即執行繪圖指令。在仿真中途可按鍵Ctrl+C來終止程序執行。程序 執行過程中將顯示出物體墜落的動畫效果,其中的一個幀如圖1.2所 示。
பைடு நூலகம்
用Matlab常微分方程求解器重新仿真實例1.2的乒乓球彈跳模型,要求也 能 夠在仿真過程中動態顯示球的墜落和反彈過程,在仿真結束後輸出小球 位移和速度的變化曲 線。設小球的初始位置距離水平面1米,由靜止狀態開始自由墜落,並 設反彈瞬間的速度衰減 係數為K= 0:85。 數學模型與實例1.2完全相同,為了利用標準求解器進行求解,首先將 模型中的方程改寫 為標準的狀態方程形式,小球在空中時,有運動方程
並注意小球碰撞水平面瞬間(在反彈之前)的條件是y60且v60。碰撞瞬 間速度發生反向 並以係數K衰減。據此編寫程序,程序中以x1(t)表示速度狀態變量v(t), 以x2(t)表示位移 狀態變量y(t),並以矩陣形式描述,代碼如下。 v0=0; y0=1; %球的初始狀態 x_state=[v0,y0];%將初始狀態賦值到狀態變量中
下面我們通過對自由落體的仿真試驗來說明計算機仿真的過程。 〔實例1.1〕試對空氣中在重力作用下不同質量物體的下落過程進行建 模和仿真。已知重 力加速度g= 9:8m/s^2,在初始時刻t0= 0s時物體由靜止開始墜落。空氣 對落體的影響可以 忽略不計。 (1)建立數學模型 首先,我們根據物理原理建立自由落體的數學模型。在空氣阻力可忽略 不計時,質量為m 的物體在自由墜落過程中受到豎直向下的恆定重力的作用,由牛頓第二 定律,我們知道,重 力F,加速度a以及物體質量m之間的關係是: F=ma (1.1) 其中加速度就是重力加速度,即a=g。根據題設,初始時刻為t0= 0,物 體的初始速度 為v(t0) = 0,並設物體下落的瞬時速度為v(t)。設物體在t 時刻的位移為 s(t),並設初始位移為零,即s(t0) = 0。根據加速度、速度、位移三者之 間的微積分關係,我們得到一組數學方程 a =dv/dt v =ds/dt F = ma 以及初始條件(也稱為方程的邊界條件) v(t0) = 0 (1.5) s(t0) = 0 m (1.6 我們需要得出不同時刻物體的運動狀態,即物體的瞬時速度和瞬時位 移。至此,我們得到 了自由落體的數學描述。 (2)數學模型的解析分析 數學模型建立之後,可以嘗試對其進行解析求解。解析結果可以幫助我 們驗證仿真數值 結果。對於這個數學模型,其求解十分簡單。只要對加速度方程、速度 方程進行積分並代入初始條件,就能得到我們熟知的結果:
實例1.2〕對乒乓球的彈跳過程進行仿真。忽略空氣對球的影響,乒乓 球垂直下落,落點 為光滑的水平面,乒乓球接觸落點立即反彈。如果不考慮彈跳中的能量 損耗,則反彈前後的瞬時速率不變,但方向相反。如果考慮撞擊損耗, 則反彈速率有所降低。我們希望通過仿真得出乒乓球位移隨時間變化的 關係曲線,並進行彈跳過程的「實時」動畫顯示。 (1)數學模型 首先對乒乓球彈跳過程進行一些理想化假設。設球是剛性的,質量為 m,垂直下落。碰 擊面為水平光滑平面。在理想情況下碰擊無能量損耗。如果考慮碰擊面 損耗,則碰擊前後速 度方向相反,大小按比例係數K;0< K<1下降。在t 時刻的速度設為 v=v(t),位移設 為y=y(t),並以碰擊點為坐標原點,水平方向為坐標橫軸建立直角坐標 系。球體的速度以豎 直向上方向為正方向。重力加速度為g= 9:8m=s2。初始條件假設:設初 始時刻t0= 0球體的初始速度為v0=v(t0),初始位移為y0=y(t0)。受力分 析:在空中時小球受重力F=mg作用,其中,g=-dv/dt。則在t+ dt 時刻小 球的速度為(注意其中負號是考慮了速度的方向) v(t+ dt) =v(t)¡gdt (1.11) 在t+ dt 時刻小球的位移為 y(t+ dt) =y(t) +v(t)dt (1.12) 在小球撞擊水平面的瞬間,即y(t) = 0的時刻,它的速度方向改變,大小 按比例K衰減。 當K= 1時,就是無損耗彈跳情況。因此,小球反彈瞬間(t+ dt 時刻)的
function xdot=ch2example6statefun(t, x, flag) % 乒乓球彈跳模型的標準狀態方程 % x(1)為小球速度,x(2)為小球位移 xdot=zeros(2,1); % 狀態變量矩陣初始化 xdot(1)=-9.8; % 速度加速度方程 xdot(2)=x(1); % 位移速度方程
end % 理論計算, 以便與仿真結果對照 t_theory=0:0.01:N*dt; % 設置解析計算的時間點 v_theory=g*t_theory; % 解析計算的瞬時速度 s_theory=1/2*g*t_theory.^2; % 解析計算的瞬時位移 % 作圖: 仿真結果與解析結果對比 t=0:dt:N*dt; plot(t,s,'o', t_theory,s_theory, '-'); xlabel('時間t'); ylabel('位移s'); legend('仿真結果','理論結果'); 仿真程序編寫完成並調試正確之後,運行得到的結果如圖1.1所示。從 圖中可見,仿真得 出的位移與理論結果之間存在差別,這種差別是由於微分方程數值求解 的算法和採用步長較 大而引起的。事實上,我們這裡採用的數值求解算法是最簡單的矩形積 分的方法,精度不高, 僅僅是為了說明仿真過程而已。現代仿真技術和數值計算方法中已經開 發出許多更好的微分 方程求解算法,可供直接利用。 (5)仿真程序的功能擴展 從ch1example1prg1.m的程序代碼中可見,我們採用了循環語句來實現對 微分方程的遞 推求解,每次循環就將計算時刻向前推進一個步長。全部循環執行完畢 後,就得到了一系列時刻上物體的瞬時速度和瞬時位移值,最後通過繪 圖語句將結果數據用曲線表達出來。 如果我們希望以動態方式來觀察物體墜落的過程,可以這樣設計仿真程 序:使得在數值求 解的過程中能將求解結果以圖形方式輸出出來。這樣,在數值求解不斷 更新的過程中輸出圖 形也隨之同步更新,形成一種「動畫」的效果。這種一邊計算一邊輸出 可視化結果的方式更 加形象直觀,更便於理解物理系統的工作過程,同時也方便演示,教學 講解和學術交流。 我們可以將作圖語句放在遞推計算循環內,並設置即時作圖刷新方式, 從而得到這種「動
...... legend('K=0.85','K=1'); 圖1.3中分別作出了是碰擊衰減係數K= 1和K= 0:85兩種情況下的小球彈 跳位移曲 線。對程序稍加修改就可以得到顯示小球彈跳過程的動畫。修改後的程 序文件代碼如下,讀者可運行該程序觀察不同的碰擊衰減係數下的小球 彈跳過程。 〔程序代碼〕ch1example2prg2.m % ch1example2prg2.m g=9.8; % 重力加速度 v0=0; % 初始速度 y0=1; % 初始位置 m=1; % 小球質量 t0=0; % 起始時間 K=0.85; % 彈跳的損耗係數 N=5000; % 仿真的總步進數 dt=0.005; % 仿真步長 v=v0; % 初狀態 y=y0; for k=1:N if y >0 % 小球在空中的動力方程計算 v =v -g*dt; y =y +v*dt; else % 碰擊瞬間的計算 y =-K.*v*dt; v =-K.*v-g*dt; end plot(0,y,'o'); axis([-2 2 0 1]); % 坐標範圍固定 set(gcf,'DoubleBuffer','on'); % 雙緩衝避免作圖閃爍 drawnow; end