MATLAB Simulink系统建模与仿真 实验报告
Matlab simulink 上机实验报告 简单版

201006113 11002 Matlab上机实验报告
◆实验一: Smulink动态仿真集成环境
➢ 1.目的要求
➢熟悉simulink环境, 掌握simulink的仿真方法。
➢ 2.掌握要点
➢熟悉simulink环境, 掌握simulink的仿真方法。
➢ 3.实验内容
➢熟悉simulink环境;
➢熟悉基本的模块库以及功能模块
➢搭建简单的电路进行仿真;
➢对分析参数对结果的影响;
1.建立如图所示的仿真系统.
完成过程:
********* ***** 结果如下:
◆ 2.建立如图所示的仿真系统.
◆将红色区域部分创建并封装装成子系统
完成过程:
没有设置子系统时:
没有设置子系统时的结果如下:
以下开始设置子系统并封装: 修改变量后:
最终如下图所示:
开始封装设置过程: 设置子系统各个参数
设置完成后如下图所示:
双击设置好的封装并分别输入与变量对应的参数如下:
运行结果如下:。
matlab中Simulink 的仿真实验报告
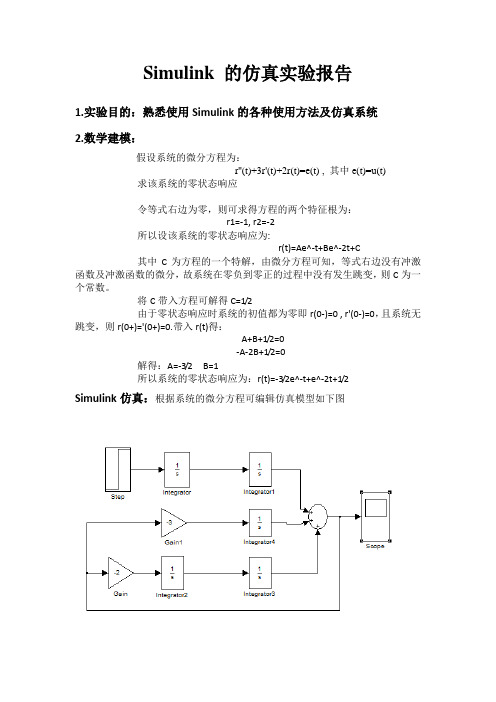
Simulink 的仿真实验报告1.实验目的:熟悉使用Simulink的各种使用方法及仿真系统2.数学建模:假设系统的微分方程为:r''(t)+3r'(t)+2r(t)=e(t) , 其中e(t)=u(t)求该系统的零状态响应令等式右边为零,则可求得方程的两个特征根为:r1=-1, r2=-2所以设该系统的零状态响应为:r(t)=Ae^-t+Be^-2t+C其中C为方程的一个特解,由微分方程可知,等式右边没有冲激函数及冲激函数的微分,故系统在零负到零正的过程中没有发生跳变,则C为一个常数。
将C带入方程可解得C=1/2由于零状态响应时系统的初值都为零即r(0-)=0 , r'(0-)=0,且系统无跳变,则r(0+)='(0+)=0.带入r(t)得:A+B+1/2=0-A-2B+1/2=0解得:A=-3/2 B=1所以系统的零状态响应为:r(t)=-3/2e^-t+e^-2t+1/2Simulink仿真:根据系统的微分方程可编辑仿真模型如下图打开开始按键,可以得到波形图:验证仿真结果:由前面得到的系统零状态响应结果:r(t)=-3/2e^-t+e^-2t+1/2可编辑仿真模型:>> t=(0::10);>> plot(t,((-3)/2)*exp((-1)*t)+exp((-2)*t)+1/2)实验结论:Simulink仿真结果和函数仿真结果基本一致,所以simulink仿真是正确的。
实验心得:1.此实验是利用matlab对一个微分方程进行建模求解,既要求我们掌握对微分方程的求解,又要求掌握用matlab对微分方程进行建模,所以要求我们对软件得熟悉。
2.信号与系统的实验主要是用matlab分析或验证书上的东西,前提当然是学好书本上的知识,再学好matlab这个软件。
3.用simulink仿真的时候,对函数用积分器较好,不知为什么用微分器做不出来,报错显示不出图形。
Simulink建模与仿真
《通信系统仿真》实验报告姓名杨利刚班级A0811 实验室203 组号28 学号28 实验日期实验名称实验三Simulink建模与仿真实验成绩教师签字一、实验目的1、了解simulink的相关知识2、掌握Matlab/simulink提供的基本模块库和常用的模块3、掌握simulink建模仿真的基本方法二、实验原理Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模。
它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率,并且提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。
Simulink基本库是系统建模中最常用的模块库,原则上一切模型都是可以由基本库中的模块来构建,为了方便专业用户使用,Simulink还提供了大量的专业模块库,如为通信系统和信号处理而提供的CDMA参考库、通信模块库和DSP模块库等,但是,建议初学者不宜过多使用这些专业库,而应当从所建摸的系统原理入手,利用基本模块来构建系统,以深入理解系统运行情况。
Simulink的常用库模块有12个:(1)连续时间线性系统库;(2)非连续系统库;(3)离散系统库;(4)查表操作模块;(5)数学函数库;(6)模型检查和建模辅助工具;(7)端口和子系统;(8)信号路由库;(9)信号属性转换库;(10)信号源库;(11)信宿和仿真显示仪器库;(12)用户自定义函数库。
Simulink的建模主要是子系统的建模,子系统建模完成后,再对其进行封装,即完成了一个基本模型的建立。
三、实验内容1、现有对RLC充放电电路进行仿真的模型。
请参照仿真模型,进行Simulink的建模仿真,相关参数按照例题中的参数设置。
MATLAB实验SIMULINK仿真
实验九SIMULINK仿真一、实验目的SIMULINK是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MA TLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。
在SIMULINK环境中,用户不仅可以观察现实世界中非线性因素和各种随机因素对系统行为的影响,而且也可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。
因此SIMULINK已然成为目前控制工程界的通用软件,而且在许多其他的领域,如通信、信号处理、DSP、电力、金融、生物系统等,也获得重要应用。
对于信息类专业的学生来说,无论是学习专业课程或者相关课程设计还是在今后的工作中,掌握SIMULINK,就等于是有了一把利器。
本次实验的目的就是通过上机训练,掌握利用SIMULINK对一些工程技术问题(例如数字电路)进行建模、仿真和分析的基本方法。
二、实验预备知识1. SIMULINK快速入门在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件,则很难准确地把一个控制系统的复杂模型输入计算机,对其进行进一步的分析与仿真。
1990年,Math Works软件公司为MATLAB提供了新的控制系统模型图输入与仿真工具,并命名为SIMULAB,该工具很快就在控制工程界获得了广泛的认可,使得仿真软件进入了模型化图形组态阶段。
但因其名字与当时比较著名的软件SIMULA类似,所以1992年正式将该软件更名为SIMULINK。
SIMULINK的出现,给控制系统分析与设计带来了福音。
顾名思义,该软件的名称表明了该系统的两个主要功能:Simu(仿真)和Link(连接),即该软件可以利用系统提供的各种功能模块并通过信号线连接各个模块从而创建出所需要的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真和分析。
⏹SIMULINK的启动首先启动MATLAB,然后在MA TLAB主界面中单击上面的Simulink按钮或在命令窗口中输入simulink命令。
matlab simulink仿真实验报告
matlab simulink仿真实验报告[Abstract]本篇报告介绍了一项利用Matlab和Simulink进行仿真实验的过程和结果。
实验主要涉及对加速度计数据的滤波和降噪处理,以及利用观测器估计一个非线性系统的状态变量。
本文介绍了实验设计的思路和步骤,详细讲解了实验中所使用到的算法和模型,并对实验结果进行了分析和总结。
[Keywords][Introduction]在自动化控制、机器人技术、航天航空、汽车电子等领域中,传感器和估计器是广泛应用的两类算法。
传感器可以测量物理量,如位置、速度、加速度等,并将其转化为电信号输出。
估计器则通过对物理模型的建模和输出信号的处理,来推测和估计系统的状态变量。
加速度计可以测量物体在三个轴向上的加速度,同时可以进行数据滤波和降噪。
估计器可以用于非线性系统的状态估计,具有广泛的应用前景。
[Simulation Process]1. 数据采集处理加速度计可以用于测量物体在三个轴向上的加速度。
由于传感器的噪声和误差,采集的数据往往不够准确和稳定,需要通过滤波和降噪等算法进行处理。
本实验中采用了常用的Butterworth低通滤波器和移动平均滤波器来对加速度计数据进行处理。
Butterworth低通滤波器是一种线性相位滤波器,可以将高频信号滤去,降低信号噪声。
在Matlab中,可以通过函数[b,a] = butter(n,Wn,'low')生成Butterworth低通滤波器。
其中,n为滤波器的阶数,Wn为截止频率。
移动平均滤波器是一种简单有效的滤波方法,可以对信号进行平均处理,消除信号的高频成分和噪声。
在Matlab中,可以通过函数smooth(x,n)生成移动平均滤波器。
其中,x为待处理的信号,n为滤波器窗口大小。
2. 状态估计模型状态估计模型是一种建立在数学模型基础上的估计方法,常常用于非线性系统的状态估计。
本实验中,给定了以下非线性系统的模型:$$\begin{cases}x_{1}' = x_{2} \cos(x_{1}) \\x_{2}'= u\end{cases}$$其中,x1和x2为系统状态变量,u为系统的控制输入。
MATLABSimulink和控制系统仿真实验报告
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
实验报告5Simulink仿真[推荐五篇]
![实验报告5Simulink仿真[推荐五篇]](https://img.taocdn.com/s3/m/938234db5ff7ba0d4a7302768e9951e79b896917.png)
实验报告5Simulink仿真[推荐五篇]第一篇:实验报告 5 Simulink仿真实验五 Simulink仿真(一)一、实验目的1、熟悉Simulink仿真环境2、了解Simulink基本操作3、了解Simulink系统建模基本方法3、熟悉Simulink仿真系统参数设置和子系统封装的基本方法二、实验内容1、在matlab命令窗口中输入simulink,观察其模块库的构成;2、了解模块库中常用模块的使用方法;3、已知单位负反馈系统的开环传递函数为G=100s+2s(s+1)(s+20)建立系统的模型,输入信号为单位阶跃信号,用示波器观察输出。
4、建立一个包含Gain、Transfer Fcn、Sum、Step、Sine Wave、Zero-Pole、Integrator、Derivative等模块构成的自定义模块库Library1;5、建立如图7-12所示的双闭环调速系统的Simulink的动态结构图,再把电流负反馈内环封装为子系统,建立动态结构图。
三、实验结果及分析:图5-1图5-2图5-3图5-4双闭环调速系统的Simulink的动态结构图图5-5把电流负反馈内环封装为子系统的动态结构图双击Subsystem模块,编辑反馈电流环Subsystem子系统,如图5-6所示:图5-6分析:Simulink是Mathworks开发的MATLAB中的工具之一,主要功能是实现动态系统建模、仿真与分析。
可以在实际系统制作出来之前,预先对系统进行仿真与分析,并可对系统做适当的适时修正或按照仿真的最佳效果来调试及整定控制系统的参数,达到提高系统性能。
减少涉及系统过程中的反复修改的时间、实现高效率地开发系统的目标。
Simulink提供了建模、分析和仿真各种动态系统的交互环境,包括连续系统、离散系统和混杂系统,还提供了采用鼠标拖放的方法建立系统框图模型的图形交互界面。
第二篇:仿真实验报告仿真软件实验实验名称:基于电渗流的微通道门进样的数值模拟实验日期:2013.9.4一、实验目的1、对建模及仿真技术初步了解2、学习并掌握Comsol Multiphysics的使用方法3、了解电渗进样原理并进行数值模拟4、运用Comsol Multiphysics建立多场耦合模型,加深对多耦合场的认识二、实验设备实验室计算机,Comsol Multiphysics 3.5a软件。
MATLAB Simulink系统建模与仿真 实验报告.
MATLAB/Simulink 电力系统建模与仿真实验报告姓名:******专业:电气工程及其自动化班级:*******************学号:*******************实验一无穷大功率电源供电系统三相短路仿真1.1 无穷大功率电源供电系统仿真模型构建运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块:(1)无穷大功率电源模块(Three-phase source)(2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load)(3)三相串联RLC支路模块(Three-Phase Series RLC Branch)(4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings))(5)三相电压电流测量模块(Three-Phase V-I Measurement)(6)三相故障设置模块(Three-Phase Fault)(7)示波器模块(Scope)(8)电力系统图形用户界面(Powergui)按电路原理图连接线路得到仿真图如下:1.2 无穷大功率电源供电系统仿真参数设置1.2.1 电源模块设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:1.2.2 变压器模块变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图:1.2.3 输电线路模块根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图:1.2.4 三相电压电流测量模块此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:1.2.5 故障设置模块勾选故障相A、B、C,设置短路电阻0.00001Ω,设置0.02s—0.2s发生短路故障,参数设置如下图:1.2.6 示波器模块为了得到仿真结果准确数值,可将示波器模块的“Data History”栏设置为下图所示:1.3 无穷大功率电源供电系统仿真结果及分析得到以上的电力系统参数后,可以首先计算出在变压器低压母线发生三相短路故障时短路电流周期分量幅值和冲击电流的大小,短路电流周期分量的幅值为Im=10.63kA,时间常数Ta=0.0211s,则短路冲击电流为Iim=17.3kA。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB/Simulink 电力系统建模与仿真实验报告姓名:******专业:电气工程及其自动化班级:*******************学号:*******************实验一无穷大功率电源供电系统三相短路仿真1.1 无穷大功率电源供电系统仿真模型构建运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块:(1)无穷大功率电源模块(Three-phase source)(2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load)(3)三相串联RLC支路模块(Three-Phase Series RLC Branch)(4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings))(5)三相电压电流测量模块(Three-Phase V-I Measurement)(6)三相故障设置模块(Three-Phase Fault)(7)示波器模块(Scope)(8)电力系统图形用户界面(Powergui)按电路原理图连接线路得到仿真图如下:1.2 无穷大功率电源供电系统仿真参数设置1.2.1 电源模块设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:1.2.2 变压器模块变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图:1.2.3 输电线路模块根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图:1.2.4 三相电压电流测量模块此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:1.2.5 故障设置模块勾选故障相A、B、C,设置短路电阻0.00001Ω,设置0.02s—0.2s发生短路故障,参数设置如下图:1.2.6 示波器模块为了得到仿真结果准确数值,可将示波器模块的“Data History”栏设置为下图所示:1.3 无穷大功率电源供电系统仿真结果及分析得到以上的电力系统参数后,可以首先计算出在变压器低压母线发生三相短路故障时短路电流周期分量幅值和冲击电流的大小,短路电流周期分量的幅值为Im=10.63kA,时间常数Ta=0.0211s,则短路冲击电流为Iim=17.3kA。
通过模型窗口菜单中的“Simulation--Configuration Parameters”命令打开设置仿真参数的对话框,选择可变步长的ode23t算法,仿真起始时间设置为0s,终止时间设置为0.2s,其他参数采用默认设置。
在三相故障模块设置在0.02s时刻变压器低压母线发生三相短路故障。
运行仿真,得到变压器低压侧的三相短路电流波形如下图所示:可见,短路电流周期分量的幅值为10.64kA,冲击电流为17.39kA,与理论计算相比有差别,这是由于电源模块的内阻设置不同而造成的。
实验二同步发电机突然短路的暂态过程仿真2.1 发电机端突然发生三相短路的Simulink仿真模型构建根据给出的发动机参数,添加下列模块:(1)p.u.标准同步发电机模块(Synchronous Machine pu Standard)(2)常数模块(Constant)(3)电压测量模块(Voltage Measurement )(4)放大器模块(Gain)(5)信号选择模块(Bus Selector)其他模块选取与前相同,建立Simulink仿真模型如下图所示:2.2 发电机端突然发生三相短路的Simulink仿真参数设置2.2.1 同步发电机模块设置同步发电机功率为200MVA,电压13.8kV,频率50Hz,电抗设置如图,d轴时间常数选择“Short-circuit”,q轴时间常数选择“Open-circuit”。
时间常数设置如图,定子电阻(p.u.)0.005,惯性系数3.2,摩擦系数0,极对数32,初始条件栏将由Powergui模块自动设定。
参数设置如下图:2.2.2 变压器模块设置功率210MVA,频率50Hz,接线方式为yD1,二次侧中性点接地,绕组参数:一次侧电压13.8kV,二次侧电压230kV,电阻均为0.0027,电感均为0.08,励磁电阻500,励磁电感500。
参数设置如下图:2.2.3 Powergui模块初始化设置双击Powergui模块,打开潮流计算和电机初始化窗口,设定同步发电机为平衡节点“Swing bus”。
初始化后,与同步发电机模块输入端口相连的两个常数模块Pm和Vf以及同步发电机模块中的“Init.Cond.”将会自动设置。
数据如下图所示:2.3 发电机端突然发生三相短路的Simulink仿真结果及分析选择Ode15算法,仿真结束时间取1s。
设置故障模块在0.02025s—1s发生三相短路故障。
开始仿真,得到发电机端突然三相短路后的三相定子电流波形图如下图所示:其中,A相定子电流的冲击电流标幺值为9.1048,和理论计算值存在0.95%的误差。
短路后定子电流的d轴和q轴分量Id、Iq以及励磁电流If的仿真波形如下图所示:现设置在0.02025s时发生BC两相短路故障。
开始仿真,得到发电机端突然两相短路后的三相定子电流仿真波形如下图:实验三小电流接地系统单相故障3.1 小电流接地系统仿真模型构建3.1.1 中性点不接地系统的仿真模型及计算利用Simulink建立一个10kV中性点不接地系统仿真模型,添加下列模块:(1)输电线路模块(Three-Phase PI Section Line)(2)信号接收模块(From)(3)信号输出模块(Demux)(4)输入加法器模块(Sum)(5)三相序分量模块(Discrete 3-phase Sequence Analyzer)(6)万用表模块(MultiMeter)建立中性点不接地系统仿真模型如下图所示:各模块参数设置如下:(1)三相电源模块:电压10.5kV,接线方式Y形连接,其他参数设置与实验一相同。
(2)输电线路模块Line1~Line4:线路长度分别为130km、175km、1km、150km,其他参数设置相同。
下图为Line1参数设置。
(3)线路负荷模块:Load1~Load3设置其有功负荷分别为1MW、0.2MW、2MW,其它参数相同。
Load4设置为纯电阻负荷,有功负荷为1MW。
下图分别为Load1、Load4参数设置。
(4)三相电压电流测量模块:勾选使用标签,按线路设置标签序号。
下图为线路一测量模块的参数设置。
(5)故障模块设置:选择在第三条出线的1km处(即Line3与Line4之间)发生A相金属性单相接地,故障模块的参数设置如下图所示:系统的零序电压3U0及每条线路始端的零序电流3I0采用下图连接方式测量得到:故障点的接地电流Id可用下图万用表测量得到:根据以上设置的参数,可以通过计算得到系统在第三条出线的1km处(即Line3与Line4之间)发生A相金属性单相接地时各线路始端的零序电流有效值为:线路1:5.75A,线路2:13.5A,接地点的电流为20.18A。
3.1.2 中性点经消弧线圈接地系统的仿真模型及计算在上实验基础上,在电源中性点添加一个电感线圈,其他参数不变。
仿真模型如下图所示:根据线路参数,如果要使接地点电流近似为0,计算得需要的补偿电感应为L=0.9566H,由于完全补偿存在串联谐振过电压问题,因此实际工程常采用过补偿方式,当取过补偿度为10%时,经计算消弧线圈电感为L=0.8697H。
消弧线圈参数设置如下图:3.2 小电流接地系统仿真结果及分析在仿真开始前,选择离散算法,仿真结束时间取0.2s,利用Powergui模块设置离散方式,时间为1x10^-5s,系统在0.04s时发生A相金属性单相接地。
3.2.1 中性点不接地系统的仿真结果分析设置好参数,运行10kV中性点不接地仿真模型,得到系统三相对地电压和线电压的波形,如下图所示。
从图中可见,系统在0.04s时发生A相金属性单相接地后,A相对地电压变为零,BC相对地电压升高3倍,但线电压仍然保持对称故对负荷没有影响。
系统的零序电压3U0及线路一始端的零序电流3I0、故障点的接地电流Id波形如下图所示:仿真得到的各线路始端零序电流,接地电流Id的有效值为:线路一:5.83A,线路二:7.99A,线路三:13.86A,Id=20.64A。
与理论计算值相比,仿真结果略大,但误差不大于3%。
从上图中可以看出,在中性点不接地方式下,非故障线路的零序电流超前零序电压90°;故障线路的零序电流为全系统非故障元件对地电容电流之总和,零序电流滞后零序电压90°;故障线路的零序电流和非故障线路的零序电流相位差为180°。
故障后的零序分量还可以采用下图所示的“三相序分量模块”方法来得到,下图所示波形为故障线路零序电流的幅值和相位图。
由图中可得故障线路零序电流的幅值为I0=6.52A,则3I0的有效值为13.83A,与从上图中线路三测量得到的13.86A仅相差0.2%。
3.2.2 中性点经消弧线圈接地系统的仿真结果及分析设置好参数,运行10kv中性点经消弧线圈接地系统仿真模型,得到系统三相对地电压和线电压的波形与不接地系统仿真图相同。
系统的零序电压3U0及线路一始端的零序电流3I0、消弧线圈电流IL、故障点的接地电流Id波形如下图所示:从上图所知,当单相接地故障的暂态过程结束后,故障点的接地电流Id的有效值在2.9A 左右,远小于中性点不接地系统的接地电流,因此补偿的效果十分明显。
对于非故障线路来说,其零序电流仍是本身的电容电流,零序电流超前零序电压90°,电容电流的实际方向为由母线流向线路,这与中性点不接地系统是相同的。
但是对于故障路线路来说,其零序电流将大于本身的电容电流,并且电容电流的实际方向也是由母线流向线路。
因此,在这种情况下无法用电流方向的差别来判断故障线路,也很难用零序电流的大小来找出故障线路。
实验四Simulink在变压器微机继电保护中的应用举例4.1 变压器仿真模型构建根据双侧电源的双绕组变压器的简单电力系统接线图,利用Simulink绘制仿真电路图如下:(1)电源模块:电源EM与电源EN电势相位差10°,其他设置相同,下图为电源EN参数设置:(2)变压器模块:勾选“饱和铁心(Saturable core)”,为了简化仿真,变压器两侧的绕组接线方式相同,电压等级也相同,参数设置如下图所示:(3)三相电压电流测量模块UM、UN将在变压器两侧测量到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用。