现代测控大作业
现代检测技术大作业最终版

现代检测技术大型作业(2014/2015学年第1学期)课题名称粮食存储环境品质监测系统设计院(系)自动化工程学院专业电气系统检测与控制小组成员时间指导老师一.设计背景及意义“国以民为本,民以食为天”,“兵马未动,粮草先行”,这些都充分说明粮食对国家的重要性。
储粮是为了防备战争、保证非农业人口的粮食消费需求、调节国内粮食供求平衡、稳定粮食市场价格、应对重大自然灾害及其它突发性事件而采取的有效措施。
因此,粮食的科学储藏具有重要的战略意义和经济意义。
我国是世界上最大的粮食生产、储藏及消费大国,粮食储藏是国家为防备战争、灾荒及其他突发性事件而采取的有效措施,因此粮食的安全储藏是关系到国计民生的战略大事。
在粮食的储藏的过程中,由于粮仓温湿度异常而造成粮食变质,带来的经济损失是惊人的。
粮食在贮藏过程中,会因为受温度、湿度、氧气、微生物及昆虫等因素的影响,从而造成其质量的不良改变。
目前我国许多粮食仓储单位采用测温仪器与人工抄录、管理相结合的传统方法,消耗了大量的人力和财力,并且效果不佳,发霉变质等现象大量存在。
因此设计粮食储存品质监测系统,可以提高工作效率,实现粮仓数据的实时监控,是仓储单位亟待解决的重要问题。
粮食在贮藏过程中,会因为受温度、湿度、压力、2CO、微生物及昆虫等因素的影响,从而造成其质量的不良改变。
对粮食贮藏过程中的影响参数进行实时监测、分析,是保障粮食储存品质的有效手段。
在此,通过采用CAN总线的数据采集系统对影响粮食贮藏过程中的参数进行实时采集、分析,当发现不良变化时,能够及时发出预警信息,保证粮食储存的安全。
粮食储存品质监测系统是利用现场的前沿机检测粮食储备库中粮食的基本情况,并结合其他粮情信息(如入仓时间、品种、仓型、天气状况等)进行综合分析,然后通过控制电机启停,达到对相应参数的控制。
利用监控室的上位机对粮仓进行监控,用户可方便地构造自己需要的数据采集系统,在任何时候把粮仓现场的信息实时地传到控制室,管理人员不需要深入现场,就可以按照所需的要求对粮仓内的情况进行控制,还可以查看历史数据,优化现场作业,提高了生产效率,增强了国家粮食储备安全水平,以获得实时粮仓管理,实现自动化、智能化,为实现我国粮仓管理现代化更近了一步。
现代控制理论大作业
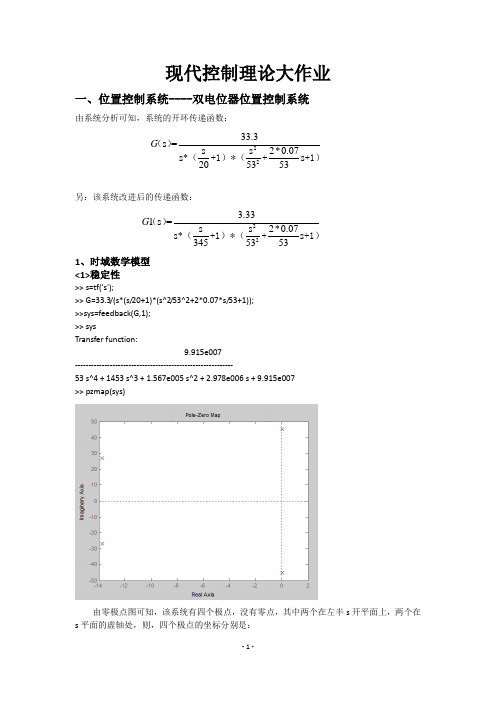
现代控制理论大作业一、位置控制系统----双电位器位置控制系统由系统分析可知,系统的开环传递函数:2233.3s =s s 2*0.07s*s 205353G()(+1)*(++1)另:该系统改进后的传递函数:223.331s =s s 2*0.07s*s 3455353G ()(+1)*(++1)1、时域数学模型<1>稳定性>> s=tf('s');>> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sysTransfer function:9.915e007 -----------------------------------------------------------53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007>> pzmap(sys)由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:>> p=pole(sys)p =0.0453 +45.2232i0.0453 -45.2232i-13.7553 +26.9359i-13.7553 -26.9359i系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态<2>稳态误差分析稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。
改进后系统(G1)如下,求其特征方程的极点:>> s=tf('s');>> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1));>> sys2=feedback(G1,1);>>p=pole(sys2);p =1.0e+002 *-3.4492-0.0206 + 0.5258i-0.0206 - 0.5258i-0.0338可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析:由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。
测控技术概论-大作业模板

测控技术概论(大作业)学期:2012-2013-1学期学院:光电工程学院专业:测控技术与仪器班级:100102班姓名:李言学号:100102122提交日期:2012年11月以下提纲供参考(蓝色文字,请删除),一级标题(如题目、摘要、引言、参考文献等)为小四号、宋体,其他文字为五号、宋体。
行间距为1.5倍。
如文中有图、表,则图题在图的下面,表头在表格的上面。
参考文献符合撰写规范、且在综述中要引用。
综述内容是讲清所写主题的基本概念、基本原理、国内外研究状况或应用情况、发展趋势,切记不是具体的专题设计,是在查找资料的基础上,经过自己提炼、总结、浓缩的作品)题目:纳米传感器一、综述(至少1000字)摘要:(至少100字)关键词:(3-5个)1 引言2 ……3 ……4 ……5 参考文献(至少5篇)[1][2][3][4][5]二、课后体会没上老师开设的测控技术概论前,自己曾设想过多次课程的内容。
测控概论,顾名思义,是关于测控技术与仪器这个专业的概述,分析。
这个专业很宽泛,凡是与测量控制,仪器仪表有关的都会用到吧!很杂,就像我们学的东西一样,多且杂。
经过五节课的洗礼,对本专业在原有基础上有了进一步了解,对于将来就业方向和就业前景有了一定的指导作用,也是我了解到测控的基本概念。
测控仪器系统大致可分为三类。
第一类,单纯以测试或检测为目的的测试仪器或系统;第二类,单纯以控制为目的的控制系统;第三类,测控一体的测控系统。
当然在现实生活中,第三类占了绝大部分。
一个系统能否正常安全的运行,测试与控制无疑起到了举足轻重的作用,倘若没有很好的测控系统,那么一切的设想都是空谈,可以说没有测控系统的正常运行就不能使其他设备更好的发挥其效用。
无论怎么样复杂或是简单的系统,测控系统都无疑是重要环节。
测控就像我们人体的免疫警告系统,一旦发现异常就会随时发出警报并做出相应的补救措施。
其重要性可见一斑。
三、奇思妙想(至少300字,根据所学测控专业知识,阐述自己的一个奇思妙想,甚至是异想天开的想法,要具有独特性、创新性,并较详细地有条理地表达出来。
测控大作业课程设计

测控大作业课程设计一、课程目标知识目标:1. 学生能掌握测控技术的基本概念,理解测控系统的工作原理;2. 学生能了解测控系统中的传感器、执行器等关键部件的原理及应用;3. 学生能运用所学知识,分析并解决实际测控过程中的问题。
技能目标:1. 学生能运用测控设备进行数据采集、处理和分析;2. 学生能设计简单的测控系统,并进行仿真与调试;3. 学生能通过小组合作,完成一个具有实际应用价值的测控大作业。
情感态度价值观目标:1. 学生培养对测控技术及工程应用的兴趣,激发创新意识;2. 学生形成严谨的科学态度,提高实践操作能力和问题解决能力;3. 学生在小组合作中培养团队协作精神,增强沟通与交流能力。
课程性质:本课程为实践性较强的课程,注重理论知识与实际应用相结合,通过测控大作业的形式,培养学生动手操作和解决问题的能力。
学生特点:学生具备一定的测控基础知识,具有较强的学习兴趣和动手能力,但实际操作经验不足。
教学要求:教师需结合学生特点,注重理论与实践相结合,引导学生进行探究式学习,提高学生的实践能力和创新能力。
在教学过程中,关注学生的个体差异,提供有针对性的指导。
通过课程目标的分解和实施,确保学生能够达到预期的学习成果。
二、教学内容1. 测控系统基本原理:包括测控系统的定义、分类及发展,测控系统的基本组成和工作原理,重点讲解传感器、执行器、数据采集与处理等关键环节。
教材章节:第一章 测控系统概述2. 传感器及其应用:介绍各种传感器的原理、特性及在实际中的应用,如温度传感器、压力传感器、光电传感器等。
教材章节:第二章 传感器及其应用3. 数据采集与处理:讲解数据采集系统的组成、工作原理,数据预处理、数字滤波、特征值提取等数据处理方法。
教材章节:第三章 数据采集与处理4. 测控系统设计:分析测控系统设计的方法和步骤,结合实际案例进行讲解,引导学生掌握系统设计的基本技能。
教材章节:第四章 测控系统设计5. 测控大作业实践:安排学生进行小组合作,完成一个具有实际应用价值的测控大作业。
现代控制理论大作业

现代控制理论直流电动机模型的分析姓名:李志鑫班级:测控1003学号:20100203030921直流电动机的介绍1.1研究的意义直流电机是现今工业上应用最广的电机之一,直流电机具有良好的调速特性、较大的启动转矩、功率大及响应快等优点。
在伺服系统中应用的直流电机称为直流伺服电机,小功率的直流伺服电机往往应用在磁盘驱动器的驱动及打印机等计算机相关的设备中,大功率的伺服电机则往往应用在工业机器人系统和CNC铣床等大型工具上。
[1]1.2直流电动机的基本结构直流电动机具有良好的启动、制动和调速特性,可以方便地在宽范围内实现无级调速,故多采用在对电动机的调速性能要求较高的生产设备中。
直流伺服电机的电枢控制:直流伺服电机一般包含3个组成部分:-图1.1①磁极:电机的定子部分,由磁极N—S级组成,可以是永久磁铁(此类称为永磁式直流伺服电机),也可以是绕在磁极上的激励线圈构成。
②电枢:电机的转子部分,为表面上绕有线圈的圆形铁芯,线圈与换向片焊接在一起。
③电刷:电机定子的一部分,当电枢转动时,电刷交替地与换向片接触在一起。
直流电动机的启动电动机从静止状态过渡到稳速的过程叫启动过程。
电机的启动性能有以下几点要求:1)启动时电磁转矩要大,以利于克服启动时的阻转矩。
2)启动时电枢电流要尽可能的小。
3)电动机有较小的转动惯量和在加速过程中保持足够大的电磁转矩,以利于缩短启动时间。
直流电动机调速可以有:(1)改变电枢电源电压;(2)在电枢回路中串调节电阻;(3)改变磁通,即改变励磁回路的调节电阻Rf以改变励磁电流。
本文章所介绍的直流伺服电机,其中励磁电流保持常数,而有电枢电流进行控制。
这种利用电枢电流对直流伺服电机的输出速度的控制称为直流伺服电机的电枢控制。
如图1.2Bm电枢线路图1.2——定义为电枢电压(伏特)。
——定义为电枢电流(安培)。
——定义为电枢电阻(欧姆)。
——定义为电枢电感(亨利)。
——定义为反电动势(伏特)。
现代检测技术大作业
2015年—2016年度第1学期课程名称:现代检测技术专业:控制工程研究生姓名:陈俊亚学号:2016232011任课教师姓名:冯晓明第一部分:现代检测技术的内容一、概述随着现代科学技术的不断发展、社会的日益进步,现代化生产的规模越来越大,管理的形式和方式趋于多样性,管理也更加科学,人们对产品的产量和质量的要求也越来越高,这就导致常规的检测参数、检测手段、检测仪表难以满足现代生产和生活的需求。
从一般的单参数测量到相关多参数的综合自动检测,从一般的参数量值测量到参数的状态估计,从确定性测量到模糊的判断等,已成为当前检测领域中的发展趋势,正受到越来越广泛的关注,从而形成了各种新的检测技术和新的检测方法,这些技术和方法统称为现代检测技术。
二、传感器的基本原理及检测技术的特点利用某种转换功能,将物理的、化学的、生物的等外界信号变成可直接测量的信号的器件称为传感器。
由于电信号易于放大、反馈、滤波、微分、存储和远距离传输,加上计算机只能处理电信号,所以,从狭义上说,传感器又可以定义为可唯一而重视性好的将外界信号转换成电信号的元器件;从广义上讲,传感器就是能感知外界信息并能按一定规律将这些信息转换成可用信号的装置;简单说传感器是将外界信号转换为电信号的装置。
所以它由敏感元器件(感知元件)和转换器件两部分组成,有的半导体敏感元器件可以直接输出电信号,本身就构成传感器。
敏感元器件品种繁多,就其感知外界信息的原理来讲,可分为:①物理类,基于力、热、光、电、磁和声等物理效应。
②化学类,基于化学反应的原理。
③生物类,基于酶、抗体、和激素等分子识别功能。
通常据其基本感知功能可分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。
检测技术的特点可以归纳为:(1)从待测参数的性质看,现代检测技术主要用于非常见的参数的测量,对于这些参数的测量目前还没有合适的传感器对应,难以实现常规意义的“一一对应”的测量;另一种情况是待测参数虽已有传感器,但测量误差比较大,受各种因素的影响比较大,不能满足测量要求。
现代测量技术与误差分析大作业

现代测量技术与误差分析大作业一:作业要求已知:1、压力传感器的量程:0~100Kg;2、传感器灵敏度:0.01Kg;3、传感器分辨率:0.01 Kg;4、传感器信号输出频率:<1000Hz;5、测试系统工作量程:0~50Kg;6、测试过程中具有高频扰动;7、测试系统工作温度范围:-40℃~60 ℃。
8、传感器输出采用电流输出:4-20mA标准电流输出要求:1、设计四通道数据采集电路,ADC采用AD7934-6;2、各通道采样周期<5ms;3、详细说明采集电路的设计依据;4、CPU可不指定型号,采集电路与CPU的接口由示意图形式表示;5、给出采集电路所有用到的元器件的具体型号、参数,主要考虑的指标;6、提供主要元器件的说明书;7、给出ADC的驱动程序。
二:设计方案(1) AD7934-6 芯片说明AD7934-6是一款12位、高速、低功耗、逐次逼近型(SAR)模数转换器(ADC),采用2.7 V至5.25 V单电源供电,最高吞吐量达625 kSPS。
该器件内置一个低噪声、宽带宽、差分采样保持放大器,可处理最高达50 MHz的输入频率。
AD7934-6具有4个带通道序列器的模拟输入通道,可以通过预先编程选择通道转换顺序。
该器件可接受单端、全差分或伪差分模拟输入。
AD7934-6内置一个精确的2.5 V片内基准电压源,可用作模数转换的基准电压源。
或者,可将外部基准电压加载至此引脚,为其提供基准电压。
AD7934-6采用先进的设计技术,可在高吞吐量的情况下实现极低的功耗,还提供灵活的功耗管理选项。
利用一个片内控制寄存器,用户可以设置不同的工作条件,包括模拟输入范围和配置、输出编码、功耗管理及通道序列化。
图一为设计方案整体框架图。
图1 设计方案整体框架图 (2) 压力传感器信号采样电路压力传感器输出采用电流输出:4-20mA 标准电流输出,所以需要放大电路,此处采用共发射极三极管放大电路,将电流放大,选择适当的电阻和三极管,使三极管工作在放大区。
现代控制理论作业

现代控制理论大作业要求:(1)自选一实际物理对象进行研究,建立实际物理系统的状态空间模型;(2)进行原系统的定性分析,包括稳定性、能控性、能观性分析;(3)根据系统提出的性能指标要求(如超调量、超调时间、调节时间等动态 性能指标以及稳态误差等稳态性能指标),进行原系统的仿真分析,和要求的性能指标做对比;(4)对不稳定系统且能镇定的系统,进行镇定控制;(5)对未达到性能指标要求的系统进行状态反馈控制设计,满足系统性能指 标要求;(6)设计状态观测器观测所有状态;(7)设计降阶状态观测器;(可选)(8)最优控制;(9)体会及对课程建议。
1实际物理模型:如图1所示,为一交接车前后连接振动简化模型。
设计一个调节器系统使得在无扰动的情况下,系统保持在零位置上(y1=0)。
其中m1=1,m2=2,k=36,b=0.62系统的描述方程:)()(m )()(m 212122121211y y b y y k yu y y b y y k y-+-=+-+-= 其空间状态模型为:设:。
,,,24132211y x yx y x y x ====[]⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡432121432143210001u 01003.03.018186.06.0-3636-10000100x x x x y y x x x x x x x x 3分析与求解过程:由根轨迹和特征根(a = -0.4500 + 7.3347i -0.4500 - 7.3347i -0.000 0 )知虽实根都为负数但都靠近零轴,是李雅普诺夫定义下的稳定,但存在震荡,所以把希望闭环极点配置在10-s ,10-s ,32-2-s ,322-s ===+=和把最小阶观测器希望极点配置在16-s ,15-s ==来改善系统的性能。
现代测控电子技术练习

现代测控电子技术练习
1、题图1为一平方根电路。
推导V in ~V o 的关系式。
题图1
2、题图2 为具有限流特性的电压—电流变换器,
1)输入电压V 1~0in =V 时,要求V 25.1~25.0o --=V ,怎样调节电位器使V o 满足要求,对应的电流I o 为多少?
2)说明自动限流的工作原理。
题图2
3、题图3为具有冷端补偿的K 型热电偶温度测量电路,补偿元件为 LM35,其温度系数为10mV/℃,热电偶输出热电势约为40.44μV/℃。
电阻R 6为检测传感器断线电阻。
1)说明电路的工作原理。
2)电路中R 3、C 1起何作用?它们的数值对电路的性能有何影响?
3)运算放大器应怎样选择?
4)说明传感器断线的检测原理。
题图3
4、设计一基于AD7533DAC的固态继电器控制电路,并解答下面问题:
1)说明所设计电路的工作原理。
2)若固态继电器的控制逻辑是TTL逻辑,对输入数码有何要求?
5、采用MAX196设计一基于51单片机的8通道数据采集系统,编写采集控制程序。
现代测控技术专用作业

现代检测技术与测试系统设计姚高军141606020013控制工程2014-11-10河海大学现代测试技术大作业(1)参考教材P134-P140的格式对下列测量数据进行分析、评定要求:1、求出6点测量值的平均值和方差估计值2、拟合线性方程、二次方程3、求出合成的标准不确定度、扩展不确定度注意:下列数据和教材中的数据属于两组不等精度的测量 x、y的单位是KPaxyi1Matlab程序clear allclcA=[-0.012 0.505 0.998 1.498 2.000 2.504 -0.014 0.505 0.998 1.498 2.000 2.504 -0.012 0.505 0.998 1.498 2.000 2.504 -0.012 0.505 0.999 1.498 2.001 2.504 -0.012 0.505 1.000 1.498 2.100 2.504 -0.011 0.505 1.038 1.498 2.002 2.504 -0.016 0.505 0.988 1.499 2.002 2.504 -0.012 0.515 0.998 1.500 2.002 2.504 -0.012 0.505 0.998 1.501 2.000 2.524 -0.012 0.504 0.958 1.501 1.998 2.505 -0.010 0.505 0.998 1.509 1.990 2.506 -0.012 0.506 0.999 1.499 2.000 2.505 -0.011 0.501 1.000 1.499 2.001 2.505 -0.012 0.505 1.001 1.498 2.000 2.505 -0.012 0.505 1.001 1.498 2.000 2.504 ]; %计算并输出各列平均值、方差m=mean(A); %平均值v=var(A); %方差fprintf('6点测量值的平均值是:\n')fprintf('%8.5f\n',m)fprintf('6点测量值的方差是:\n')fprintf('%8.5f\n',v)%线性方程、二次方程曲线拟合及参数计算figure(1)x=0:0.5:2.5;q1=polyfit(x,m,1); %线性方程曲线拟合c1=q1(1);d1=q1(2);xi=0:0.05:2.5;yi1=polyval(q1,xi); %数组多项式求值plot(x,m,'g*',xi,yi1);xlabel('x/KPa');ylabel('y/KPa');title('线性方程曲线拟合');figure(2)q2=polyfit(x,m,2);c2=q2(1);d2=q2(2);e2=q2(3);xi2=0:0.01:250;yi2=polyval(q2,xi2);plot(x,m,'b*',xi2,yi2,'k-');xlabel('x/KPa');ylabel('y/KPa');title('二次方程曲线拟合');fprintf('拟合线性方程为:Y=c1*X+d1\n')fprintf('c1=%8.5f\n',c1)fprintf('d1=%8.5f\n',d1)fprintf('拟合二次方程为:Y=c2X.^2+d2*X+e2\n');fprintf('c2=%6.5f\n',c2)fprintf('d2=%6.5f\n',d2)fprintf('e2=%6.5f\n',e2)%各分量的合成标准不确定度和扩展不确定度K=3; %为简单起见,取覆盖因子k=3s=std(A); %标准差Ye=polyval(q1,2.5)-polyval(q1,0); %Ye是系统实际满量程值,是x=2.5和x=0时拟合直线给出值之差C1=1.01; %绝对误差的合成因子C1=1.01for i=1:6s2(i)=s(i)/sqrt(15); %平均值的标准偏差(A类标准不确定度)u(i)=s2(i)*C1*100/Ye; %各列示值的不重复的不确定分量Ur(i)=sqrt(u(i)^2+0.29^2+0.034^2+0.113^2+0.056^2+0.019^2);U(i)= K* Ur(i);endfprintf('每列的合成标准不确定度是:\n')fprintf('%6.5f\n',Ur)fprintf('每列的扩展标准不确定度是:\n')fprintf('%6.5f\n',U)%环境温度影响的不确定度分量取0.29%%高度差的不确定度分量取0.034%%A/D量化误差的不确定度分量取0.113%%数值修约取舍误差的不确定度分量取0.056%%标准量的不确定度的不确定分量取0.019%结果:6点测量值的平均值是:-0.012130.505400.998131.499472.006402.505736点测量值的方差是:0.000000.000010.000240.000010.000680.00003拟合线性方程为:Y=c1*X+d1c1= 1.00535d1=-0.00619拟合二次方程为:Y=c2X.^2+d2*X+e2 c2=-0.00244d2=1.01146e2=-0.00823每列的合成标准不确定度是:0.318940.320020.356530.319990.417850.32297每列的扩展标准不确定度是:0.956810.960051.069580.959981.253560.96892拟合曲线:现代测试技术作业(2)岩土工程中使用的钢弦式压力传感器是一种感受压力并将压力转换为与压力成一定关系的频率信号输出的装置。
现代控制理论大作业资料

现代控制理论(主汽温对象模型)班级:学号:姓名:目录一. 背景及模型建立1.火电厂主汽温研究背景及意义2.主汽温对象的特性3.主汽温对象的数学模型二. 分析1.状态空间表达2.化为约当标准型状态空间表达式并进行分析3.系统状态空间表达式的求解4.系统的能控性和能观性5.系统的输入输出传递函数6.分析系统的开环稳定性7.闭环系统的极点配置8.全维状态观测器的设计9.带状态观测器的状态反馈控制系统的状态变量图10.带状态观测器的闭环状态反馈控制系统的分析三. 结束语1.主要内容2.问题及分析3.评价一. 背景及模型建立1.火电厂主汽温研究背景及意义火电厂锅炉主汽温控制决定着机组生产的经济性和安全性。
由于锅炉的蒸汽容量非常大、过热汽管道很长,主汽温调节对象往往具有大惯性和大延迟,导致锅炉主汽温控制存在很多方面的问题,影响机组的整个工作效率。
主汽温系统是表征锅炉特性的重要指标之一,主汽温的稳定对于机组的安全运行至关重要。
其重要性主要表现在以下几个方面:(1)汽温过高会加速锅炉受热面以及蒸汽管道金属的蠕变,缩短其使用寿命。
例如,12CrMoV 钢在585℃环境下可保证其应用强度的时间约为10 万小时,而在595 ℃时,其保证应用强度的时间可能仅仅是 3 万小时。
而且一旦受热面严重超温,管道材料的强度将会急剧下降,最终可能会导致爆管。
再者,汽温过高也会严重影响汽轮机的汽缸、汽门、前几级喷嘴和叶片、高压缸前轴承等部件的机械强度,从而导致设备损坏或者使用年限缩短。
(2)汽温过低,会使得机组循环热效率降低,增大煤耗。
根据理论估计可知:过热汽温每降低10℃,会使得煤耗平均增加0.2%。
同时,汽温降低还会造成汽轮机尾部的蒸汽湿度增大,其后果是,不仅汽轮机内部热效率降低,而且会加速汽轮机末几级叶片的侵蚀。
此外,汽温过低会增大汽轮机所受的轴向推力,不利于汽轮机的安全运行。
(3)汽温变化过大会使得管材及有关部件产生疲劳,此外还将引起汽轮机汽缸的转子与汽缸的胀差变化,甚至产生剧烈振动,危及机组安全运行。
现代测控大作业

现代测控大作业-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII现代检测与控制技术大作业题目:压力感应夜灯系统设计学院:信息科学技术学院专业:电子信息工程姓名:学号:指导老师:王磊完成时间: 2015年5月16日压力感应夜灯系统设计摘要:本文结合生活实际对照明控制系统的功能需求进行了合理的预测,然后根据照明系统的发展趋势,通过综合的分析归纳,提出了一种压力控制照明系统的初步设计方案。
关键词:压力感应智能照明一、引言随着人民生活水平的不断提高,人们对工作和生活环境的要求越来越高,同时对照明系统的要求也越来越高。
照明领域的能源消耗在总的能源消耗中占了相当大的比例,节约能源和提高照明质量是当务之急。
传统照明技术受到了强烈冲击。
一方面,由于信息技术和计算机的发展对照明技术的变化提供了技术支撑;另一方面,由于能源的紧缺,国家对照明节能越来越重视,新型的照明技术得以迅速发展,以满足使用者节约能源、舒适性、方便性的要求。
二、设计背景从1983年第一座带有智能化概念的建筑物在美国落成后,楼宇智能化成为建筑电气发展的主流技术。
各发达国家,如美国、日本及欧洲各国都对绿色节能照明提出了各自的工作计划及目标。
为贯彻执行资源的开发和节约并举、将节约置于首位的方针。
美国从2000年起投资5亿美元实施"国家智能照明计划"。
美国能源部预测,到2010年前后,美国将有55%的白炽灯和荧光灯被半导体灯具替代,每年仅节电就可达350亿美元。
世界著名的印制电路板生产公司、奥地利的AT&S也积极开发LED用于印制电路板,并打算将该类印制电路板作为未来的支柱产品。
韩国政府则在实施将路灯更换成智能照明系统的计划。
欧盟已经规定,自2009年9月1日起,所有超市不允许销售白炽灯泡,也不允许销售高压的荧光灯灯泡,只能销售节能灯。
90年前后,在国外智能照明蓬勃发展的背景下,真善美、松下以及SOK等众多企业相继投入大量人力物力进行相关产品的研发。
现代控制理论大作业
专业综合调研报告电气工程与智能控制专业分类号:TH89 单位代码:10110学号:中北大学综合调研报告题目: 磁盘驱动器读写磁头的定位控制系别: 计算机科学与控制工程学院专业年级: 电气工程与智能控制2014级姓名: 何雨贾晨凌朱雨薇贾凯张钊中袁航学号: 14070541 39/03/04/16/33/47指导教师: 靳鸿教授崔建峰讲师2017年5月7日摘要硬盘驱动器作为当今信息时代不可缺少的存储设备,在人们日常生活中正扮演着越来越重要的角色,同时它也成为信息时代科学技术飞速发展的助推器。
然而,随着信息量的日益增长,人们对硬盘驱动器存储容量的要求越来越高。
但另一方面由于传统硬盘驱动器的低带宽、低定位精度,导致磁头很难准确地定位在目标磁道中心位置,从而限制了存储容量的持续增加。
自IBM公司于1956年向全球展示第一台磁盘存储系统R.AMAC以来,随着存储介质、磁头、电机及半导体芯片等相关技术的不断发展,硬盘的存储容量成倍增长、读写速度不断提高。
要保证可靠的读写性能,盘片的转速控制和磁头的定位控制问题具有重要意义。
其中磁头的定位控制主要包括寻道控制与定位跟踪控制两个问题,如PID控制、自适应控制、模态切换控制等,这些控制方法大大提高了硬盘磁头伺服系统的性能。
为达到更高的精度,磁头双级驱动模型成近年的研究热点,多种控制策略已有相关报道,但目前仍处于实验水平。
关键词: 磁盘驱动器;磁头;定位;控制AbstractHard disk drive (HDD), acted as requisite storage equipment in current information age,plays a more and more vital role in people’s daily life, and it becomes a roll booster in rapid development of science and technology. However, with the increase of information capacity, we put forward a severe request for HDD data storage capacity. Unfortunately, due to the low bandwidth, low positioning accuracy in conventional HDD, magnetic head is hard to be positioned onto the destination track center, thus it limits the continuing increase in storage capacity.Since IBM brought the first disk-the random access memory accounting machine(RAMAC) to market in 1956, the storage capacity and read/write speed have continuously increased along with the development of the techniques of media,read/write head, actuators and semiconducting chips. The problems of R/W head's settling control is definitely important in order to ensure the reliability of read and write performance. Track seeking and track following are two main stages of the hard disk servo system. Researchers have developed kinds of control strategies to implement the servo control from PID control to advanced controlmethods.Dual-stage actuator has attracted many researchers and engineers for its broaderbandwidth compared with single-stage actuator.Key Words:Hard Disk Drive;Heads; Location; Control专业综合调研报告电气工程与智能控制专业第1章磁盘驱动器的介绍自上世纪50年代计算机发明以来,随着科技的进步,软硬件技术都获得了相当大的发展。
现代控制理论大作业-北科
现代控制理论大作业分析对象:汽车悬架系统指导老师:周晓敏专业:机械工程姓名:白国星学号:S2*******1.建模悬架是车轮或车桥与汽车承载部分之间具有弹性的连接装置的总称,具有传递载荷、缓和冲击、衰减振动以及调节汽车行驶中的车身位置等作用。
传统汽车悬驾系统是被动悬驾,其参数不能改变,无法控制其对不同路面激励的响应,因此对不同路面的适应性较差。
为提高汽车的行驶平顺性、操纵稳定性和制动性等性能,人们开始用主动悬架系统来代替传统的被动悬架系统。
主动悬架系统能根据路面的情况通过一个动力装置改变悬挂架的参数,改善汽车的各方面性能。
对悬驾系统进行仿真计算首先要建立悬驾系统动力学模型,随后对所建立的模型进行仿真分析。
为了简化模型,取汽车的一个车轮的悬驾系统进行研究,该模型可简化为一维二自由度的弹簧阻尼质量系统,图1所示为该模型的模拟图。
图1 悬架系统模型的模拟图其中u为动力装置的作用力,w为路面位移,x1为车身位移,x2为悬驾位移,用车身位移来度量车身的振动情况,并视为系统的输出。
路面状况以w为尺度,并视为系统的一个干扰输入。
当汽车从平面落入坑时,w可用一个阶跃信号来模拟。
u为主动悬架的作用力,它是系统的控制量。
进行受力分析,由牛顿第二规律可得车身悬架系统的动力学方程为:()()()()()1121212212122s s t m x K x x b x x um x K x x b x x u K w x ⎧=-+-+⎪⎨=-+--+-⎪⎩ 设系统状态变量为:[]1212x x x x x =则上面系统动力学方程可改写为状态空间表达式:x Ax Buy Cx Du=+⎧⎨=+⎩ 其中:()1111222200100001sss t s K K b b A m m m m K K K b b m m m m ⎡⎤⎢⎥⎢⎥⎢⎥--=⎢⎥⎢⎥-+⎢⎥-⎢⎥⎣⎦1220000101t B m K m m ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦[]1000C = []00D = u u w ⎡⎤=⎢⎥⎣⎦Matlab 系统模型程序代码: m1=800;m2=320;ks=10000;b=30000; kt=10*ks;a=[0 0 1 0;0 0 0 1;-ks/m1 ks/m1 -b/m1 b/m1; ks/m2 -(ks+kt)/m2 b/m2 -b/m2]; b=[0 0;0 0;1/m1 0;-1/m2 kt/m2]; c=[1 0 0 0];d=[0 0];G=ss(a,b,c,d)[num,den]=ss2tf(a,b,c,d,1); tfsys=tf(num,den)eig(a)figure(1)impulse(G)figure(2)step(G)系统状态空间模型::系统传递函数:系统矩阵特征值:系统矩阵特征值都在左半平面,故系统稳定。
测控大作业课程设计

测控大作业课程设计一、教学目标本课程的教学目标是使学生掌握测控大作业的基本原理、方法和技巧,能够独立完成一般的测控大作业。
具体来说,知识目标包括了解测控大作业的基本概念、原理和方法,掌握数据采集、处理和分析的基本技能;技能目标包括能够熟练使用相关的软硬件工具,独立完成测控大作业的方案设计、实施和总结;情感态度价值观目标包括培养学生的团队协作精神、创新意识和科学态度。
二、教学内容根据课程目标,教学内容主要包括测控大作业的基本原理、方法和相关技巧。
具体包括:数据采集的基本方法,如传感器选用、信号调理等;数据处理和分析的基本方法,如滤波、信号处理等;测控大作业的方案设计、实施和总结。
三、教学方法为了达到上述教学目标,我们将采用多种教学方法,如讲授法、案例分析法、实验法等。
讲授法用于讲解基本原理和方法,案例分析法用于分析具体的测控大作业实例,实验法用于锻炼学生的实际操作能力。
通过多样化的教学方法,激发学生的学习兴趣和主动性。
四、教学资源我们将选择和准备适当的教学资源,包括教材、参考书、多媒体资料和实验设备。
教材和参考书将用于提供理论知识和案例分析,多媒体资料将用于辅助讲解和演示,实验设备将用于实际操作和验证。
这些教学资源将支持教学内容和教学方法的实施,丰富学生的学习体验。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分。
平时表现主要评估学生的课堂参与度和团队协作能力,作业主要评估学生的理解和应用能力,考试主要评估学生的综合运用和分析能力。
我们将采用客观、公正的评估标准,全面反映学生的学习成果。
六、教学安排教学进度将按照教材和大纲进行,教学时间安排将保证学生在有限的时间内掌握课程内容。
教学地点将选择适合进行测控大作业的实验室和教室。
教学安排将考虑学生的作息时间和兴趣爱好,尽量满足学生的实际情况和需要。
七、差异化教学我们将根据学生的不同学习风格、兴趣和能力水平,设计差异化的教学活动和评估方式。
对于学习风格偏向实践操作的学生,我们将增加实验和实践环节;对于学习风格偏向理论学习的学生,我们将提供更多的案例分析和讨论机会。
现代控制理论大作业
现代控制理论大作业2015年1月一.系统的工程背景及物理描述超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。
上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
上图表示一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统;主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。
主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。
床身质量的运动方程为:F——空气弹簧所产生的被动控制力pF——作动器所产生的主动控制力a假设空气弹簧内为绝热过程,则被动控制力可以表示为:电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
由于系统工作在微振动状况,且在低于作动器截止频率的低频范围内,因此主动控制力可近似线性化地表示为:其中,电枢电流Ia满足微分方程:1.性能指标:闭环系统单位阶跃响应的:超调量不大于5%;过渡过程时间不大于0.5秒(∆=0.02)2.实际给定参数:某一车床的已知参数3.开环系统状态空间数学模型的推导过程: 对式0y s s =-两边求二次导,.....011()({1[/()]})n p a r r r e e e a y s F F c y k y p V V A y A k I m m==-+=-++-++对上式再求一次导,()01e a y cy k y k I m η=-+++其中1/()r r r e ep V V A y A η⎧⎫''⎡⎤=-+⎨⎬⎣⎦⎩⎭则,又由,代入00(,)()a e emy cy k y my cy k y LR E I y u t k k ηη++++++--+=,即令状态变量为,得系统开环的状态方程为:1223003123e x x x x Rk Lk Rc k Lc Rm x x x x uLm Lm Lm Lm ⎧⎪=⎪=⎨⎪++⎪=----⎩于是状态空间表达式为:[]1122003312301000010100e x x x x uRkLk Rc x k Lc Rm x Lm Lm Lm Lm x y x x ⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥++⎪⎣⎦⎣⎦----⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪⎪⎡⎤⎪⎢⎥=⎪⎢⎥⎪⎢⎥⎣⎦⎩代入系统参数,[]112233123010000103157.8910.53315.798.60100x x x x u x x x y x x ⎧⎡⎤⎡⎤⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥----⎪⎣⎦⎣⎦⎣⎦⎣⎦⎨⎡⎤⎪⎢⎥⎪=⎢⎥⎪⎢⎥⎪⎣⎦⎩二、系统的定性分析系统的能控能观性根据其能控性矩阵和能观性矩阵是否满秩来判断。
现代控制工程大作业
目 录题目一: (1)一、系统设计及仿真分析 ............................................... 错误!未定义书签。
1.确定被控系统状态空间体现式 (1)2.系统能控、能观性鉴别 (1)3.系统极点配置 (1)4.确定状态反馈增益矩阵 (2)5.确定输入变换线性放大器K (2)6.验证跟踪单位斜坡输入信号旳稳态误差 (2)7、运用SIMULINK 建立控制系统旳动态仿真模型 ....................错误!未定义书签。
(1)跟踪单位阶跃信号旳动态仿真分析 ..................................错误!未定义书签。
(2)跟踪单位斜坡信号旳动态仿真分析 ..................................错误!未定义书签。
二、采用全维状态观测器旳状态反馈系统....................... 错误!未定义书签。
1.配置闭环系统状态观测器极点 (4)2.确定观测器偏差反馈增益矩阵G (4)3.运用SIMULINK 建立系统动态仿真模型 (5)(1)对单位阶跃输入信号仿真分析 ..........................................错误!未定义书签。
(2)对单位斜坡输入信号仿真分析 ..........................................错误!未定义书签。
4.与采用直接状态反馈旳控制系统仿真成果比较 (7)(1)0)0(=x 且0)0(ˆ=x时旳仿真成果比较 ...............................错误!未定义书签。
(2)0)0(=x 且[]222)0(ˆ=x时旳仿真成果比较 ...................错误!未定义书签。
5.单位阶跃输入作用下状态估值误差收敛性分析 (8)(1)收敛过程分析......................................................................错误!未定义书签。
现代测试技术大作业
4、参考文献
• 文献号.作者.文献名,来源
例:[1]曾光奇.工程测试技术基础.武汉: 华中科技大学出版社,2002.3.
3、内容
1. 详细阐述所设计的自动测量系统的工作原理,画出系统原理 框图; 2. 详细阐述测量的物理量描述(零件图或者技术要求、量程和 测量精度要求; 3.列出选择的传感器的选用理由(优缺点分析)、技术指标及 参考价 格、可能的生产厂家;给出相应的实物图片和技术指 标; 4.详细阐述所选择的系统其他组件(如放大器、滤波器、A/D 转换器、数据采集卡、单片机或者微机系统的选择理由、给出 实物图片和详细的技术指标); 5.详细阐述所应用的信号处理方法及要解决的问题。最好能用 Matlab软件编写相应的程序。 6. 标出所引用的参考文献。
现代测试作业要求:
1、检索方式
2、主题
3、内容
4、参考文献
1、检索方式
1) 教科书 2) 科技期刊 3) 网络
注:三种方式必须都有涉及
2、主题
检索各种资料, 选择一种零件或 合适物理量,确 定测量对象,选 用后续的合适传 感器设计自动测 量系统 应变式传感器 电容式传感器 差动变压器式传感器 压电式传感器 光电式传感器 光纤感器 光栅式传感器 ………
现代检测技术大作业

1.针对检测系统比较简述通用PC/单片机(MCU)/DSP的特点。
他们的开发工具(环境)有什么特点。
通用PC的特点:运算速度快;计算精度高;具有强大的记忆功能;具有逻辑判断能力;能实现自动控制。
运算速度是计算机最显著的特点之一。
计算机的运算速度(也称处理速度)是计算机的一个重要性能指标,通常用每秒钟执行定点加法的次数或平均每秒钟执行指令的条数来衡量,其单位是每秒钟百万条指令。
在计算机内部数据采用二进制表示,二进制位数越多表示数的精度就越高。
目前计算机的计算精度已经能达到几十位有效数字。
从理论上说随着计算机技术的不断发展,计算精度可以提高到任意精度。
计算机具有存储和“记忆”大量信息的能力,可以存储计算的原始数据、程序以及最后结果,并可以对记忆的内容随机存取。
存储器不但能够存储大量的信息,而且能够快速准确地存入或取出这些信息。
计算机还具有逻辑判断能力,它根据各种条件来进行判断和分析从而决定下一步的执行方法和步骤。
计算机内部的操作运算是根据人们预先编制的程序自动控制执行的。
只要把包含一连串指令的处理程序输入计算机,计算机便会依次取出指令,逐条执行,完成各种规定的操作,直到得出结果为止。
单片机(MCU)的特点:集成度高、体积小、可靠性高;控制功能强;低电压、低功耗;具有优异的性价比。
单片机把各个功能部件都集成在一块芯片上,内部采用总线结构,减少了各芯片之间的连接,大大提高了单片机的可靠性与抗干扰能力。
另外,其体积小,对于强磁场环境易于采取屏蔽措施,适合在恶劣的环境下工作。
为了满足工业控制的要求,一般单片机的指令系统中有极其丰富的转移指令,I/O口的逻辑操作以及为处理器功能。
单片机的逻辑控制功能及运行速度均高于同一档次的微型计算机。
单片机大量应用于便携式产品和家用消费产品,低电压和低功耗的特点尤为重要。
许多单片机已可以在2.3V的电压下运行,有的以突破1.2V或0.9V下工作;功耗至微安级,一个纽扣电池就可以使其长期使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代检测与控制技术大作业
题目:压力感应夜灯系统设计
学院:信息科学技术学院
专业:电子信息工程
姓名:
学号:
指导老师:**
完成时间:2015年5月16日
压力感应夜灯系统设计
摘要:本文结合生活实际对照明控制系统的功能需求进行了合理的预测,然后根据照明系统的发展趋势,通过综合的分析归纳,提出了一种压力控制照明系统的初步设计方案。
关键词:压力感应智能照明
一、引言
随着人民生活水平的不断提高,人们对工作和生活环境的要求越来越高,同时对照明系统的要求也越来越高。
照明领域的能源消耗在总的能源消耗中占了相当大的比例,节约能源和提高照明质量是当务之急。
传统照明技术受到了强烈冲击。
一方面,由于信息技术和计算机的发展对照明技术的变化提供了技术支撑;另一方面,由于能源的紧缺,国家对照明节能越来越重视,新型的照明技术得以迅速发展,以满足使用者节约能源、舒适性、方便性的要求。
二、设计背景
从1983年第一座带有智能化概念的建筑物在美国落成后,楼宇智能化成为建筑电气发展的主流技术。
各发达国家,如美国、日本及欧洲各国都对绿色节能照明提出了各自的工作计划及目标。
为贯彻执行资源的开发和节约并举、将节约置于首位的方针。
美国从2000年起投资5亿美元实施"国家智能照明计划"。
美国能源部预测,到2010年前后,美国将有55%的白炽灯和荧光灯被半导体灯具替代,每年仅节电就可达350亿美元。
世界著名的印制电路板生产公司、奥地利的AT&S也积极开发LED用于印制电路板,并打算将该类印制电路板作为未来的支柱产品。
韩国政府则在实施将路灯更换成智能照明系统的计划。
欧盟已经规定,自2009年9月1日起,所有超市不允许销售白炽灯泡,也不允许销售高压的荧光灯灯泡,只能销售节能灯。
90年前后,在国外智能照明蓬勃发展的背景下,真善美、松下以及SOK等众多企业相继投入大量人力物力进行相关产品的研发。
国家主席胡锦涛访美期间参观世界首富比尔•盖茨位于西雅图的私人豪宅,所有电器设备均被连接成一个可控网络,涵盖了包括智能气象、智能照明、智能通风、智能电工和智能安防等各项“未来科学技术”,堪称世界智能家居的“未来之屋”。
上海世博会上,大家见识到了不同的馆区不同的国家有着不同的风采,但是,不管是美国馆、加拿大
馆、文化中心还是上汽通用汽车馆,都有一个共同点,那就是室内照明全部采用被称为“21世纪绿色光源”的智能照明系统。
由此可见,智能照明已经成为全球各国各行业的照明方面的共识。
三、系统原理与组成
压力感应夜灯系统适用于夜晚生活或夜晚起夜,只需通过踩踏“压力感应垫”即可控制电灯的开关,免去了摸黑寻找电灯开关的麻烦,且避免了使用手动开关忘记关灯造成能源浪费,省时又省电。
压力感应夜灯系统主要由开关模块、调光模块、时间管理模块、手持式编程器、压力感应器、光线感应器、红外线发射模块和红外线接收模块等部分构成,通过多个不同位置的“感应垫”控制系统各部分灯光的点亮和熄灭,亦可通过遥控单独控制局部灯光。
在白天室内光线充足的情况下系统会自动进入休眠模式,避免能源浪费;深夜突然开灯时灯光由弱渐强,避免了从黑暗环境突然进入强光环境造成对眼睛的伤害。
使用者可根据个人习惯调节灯光亮度,系统的记忆功能会保存习惯设定,自动调整。
“压力感应垫”在床板和房间门口铺设(门内外各一个),在感受到压力和压力消失时自动发射红外线信号至指定电灯开关,即可控制灯光亮灭。
当主人夜间起床去卫生间时床上的压力传感器检测到人离开床垫即可自动打开床头灯,在从开着灯的房间走出时,离开房间踩踏房间内的“感应垫”即可发送开灯信号打开门外相邻区间的灯,走出房间踩踏房间外的“感应垫”即可发送关灯信号关闭身后房间的灯;返回房间时再次踩踏“感应垫”则发送与上一次相反的控制信号(即在同一个“感应垫”上第一次踩踏为开灯第二次踩踏为关灯)。
压力感应夜灯系统有两种模式选择:
1、延时模式,踩踏“感应垫”后,电灯延时开启一段时间,然后自动关闭;
2、开关模式,踩踏一次“感应垫”,开启电灯,再踩踏一次“感应垫”,关闭电灯(在电灯开启情况下,踩踏“感应垫”关闭电灯,在电灯关闭情况下,踩踏“感应垫”开启电灯)。
使用者可根据需要选择相应的工作模式。
压力感应夜灯系统的特点:
1、只需踩踏即可开启和关闭电灯,简单、方便。
2、无需大面积铺设,只需放在房间门前,即可控制房间的电灯。
3、压力感应垫通过红外线与开关控制器通讯,免去了铺设线缆的繁琐。
4、压力感应夜灯系统有多种模式选择,延时模式和开关模式,根据不同环境选择不同的模式,可有效节省电能。
5、压力感应垫外部可安装清洁套,以保护感应垫,并保持清洁。
6、压力感应垫可升级增加自发电功能,免维护,不需要额外电源,只需踩踏即可正常工作。
7、压力感应夜灯系统可设置缓速点亮电灯,避免强光对眼睛造成刺激伤害。
8、床上的压力感应垫与其他感应垫设置不同,失去“压力”时,将点亮床头柜的电灯,感应到“压力”时,才会关闭电灯。
压力感应夜灯系统使用过程详解(部分过程可参照下页图):
夜晚,房屋主人需要起床去卫生间或其他地方活动,一起身,床上的“感应垫”失去压力,即可点亮床头柜的电灯。
主人下床穿鞋,踩踏床前的“感应垫”,点亮卧室的电灯。
走到门前,踩踏“感应垫”,点亮客厅的灯。
走进客厅,踩踏“感应垫”,关闭卧室的灯。
走到卫生间前,踩踏“感应垫”,点亮卫生间的灯。
走进卫生间,踩踏“感应垫”,关闭客厅的灯。
事情完毕之后,走到门前,踩踏“感应垫”,点亮客厅的灯。
走进客厅,踩踏“感应垫”,关闭卫生间的灯。
走到卧室门前,踩踏“感应垫”,点亮卧室的灯。
走进卧室,踩踏“感应垫”,关闭客厅的灯。
走到床前,踩踏“感应垫”,关闭卧室的灯。
在床上躺下,床上的“感应垫”感应到压力,关闭床头柜的灯。
四、系统应用潜力分析
1、良好的节能效果
压力感应夜灯系统借助各种不同的预设置控制方式和控制元件,对不同时间不同环境的光照度进行精确设置和合理管理,实现节能。
这种自动调节照度的方式,充分利用室外的自然光,只有当必需时才把灯点亮或点到要求的亮度,利用最少的能源保证所要求的照度水平,节电效果十分明显,一般可达30%以上。
此外,压力感应夜灯系统可对室内灯光进行调光控制,提高了功率因数,降低了低压无功损耗。
2、延长光源寿命
不仅可以节省大量资金,而且大大减少更换灯管的工作量,降低了照明系统的运行费用,管理维护也变得简单了。
无论是热辐射光源,还是气体放电光源,电网电压的波动是光源损坏的一个主要原因。
因此,有效地抑制电网电压的波动可以延长光源的寿命。
压力感应夜灯系统采用软启动和软关断技术,避免了冲击电流对光源的损害。
通过上述方法,光源的寿命通常可延长2~4倍。
3、改善工作环境,提高工作效率
良好的工作环境是提高工作效率的一个必要条件。
良好的设计,合理地选用光源、灯具及优良的照明控制系统,都能提高照明质量。
压力感应夜灯系统以压力感应器和红外线收发模块代替传统的平开关控制灯具,可以有效地控制各房间内整体的照度值,从而提高照度均匀性。
同时,这种控制方式内所采用的电气元件也解决了频闪效应,不会使人产生不舒适、头昏脑胀、眼睛疲劳的感觉。
4、实现多种照明效果
多种照明控制方式,可以使同一建筑物具备多种艺术效果,为建筑增色不少。
现代建筑物中,照明不单纯地为满足人们视觉上的明暗效果,更应具备多种的控制方案,使建筑物更加生动,艺术性更强,给人丰富的视觉效果和美感。
压力感应夜灯系统可按不同时间、不同用途、不同的效果,对灯光采用相应的预设置场景进行控制,可以达到丰富的艺术效果。
五、总结
通过大半个学期的学习,在老师的引导下,我们了解到了很多关于现代测控技术的知识,对这门学科有了一个基础的认识。
王老师上课平易近人,多数时间是以探讨的方式鼓励同学们说出自己的想法,然后加以点拨,激发了我们的学习积极性,课堂气氛轻松愉悦。
在学习课本知识的同时也能听到同学们的一些有创意的想法,听老师讲述了许多知识点在生活中的应用实例,开阔了视野,很庆幸选了这门有趣的课。
由于知识水平有限,我的设计仅处于初步构想阶段,还有许多缺陷,其可行性仍有待检验。
在构思过程中我深切感受到现代测控技术的重要性。
这门学科应用前景广泛,发展迅速,与我们日常生活联系紧密,对各行各业都很重要,希望能有机会深入学习并从事相关工作。
六、参考文献
[1] 张志君,于海晨,宋彤.现代检测与控制技术.北京:化学工业出版社,2007.07
[2] 李江全.现代测控系统典型应用实例.北京:电子工业出版社, 2010.08
[3] 杨欣荣.现代测控技术与智能仪器.长沙:湖南科学技术出版社, 1996.07
[4] 申忠如.现代测试技术与系统设计.西安:西安交通大学出版社, 2009.10
[5] 吴斌.现代建筑智能化系统运行与维护管理手册.北京:中国电力出版社,2014
[6] 马小军.智能照明控制系统.南京:东南大学出版社,2009
[7] 孟治国. LED驱动与智能控制. 北京:化学工业出版社,2015.01
[8] 邓海龙.传感器与检测技术.北京:中国纺织出版社, 2008.10
[9] 刘灿军.实用传感器.北京:国防工业出版社.2004
[10] 鲍丙豪,周燕,许桢.传感器手册. 北京:化学工业出版社,2008。