LabView控制步进电机
基于Labview的步进电机闭环控制系统设计
第55卷第2期2021年2月电力电子技术Power ElectronicsVol.55,No.2February2021基于Labview的步进电机闭环控制系统设计刘旭辉,简震,丁志娟,张远方(上海应用技术大学,机械工程学院,上海201418)摘要:针对步进电机容易出现丢步现象,釆用比例积分微分(PID)控制原理,并结合Labview和STM32控制器搭建了步进电机闭环控制系统。
通过调用动态链接库库函数Pcomm.dll的方式,实现了Labview与STM32控制器之间的串口通信。
设计了PID参数实时整定模块,能够快速获得最佳PID参数。
进行了步进电机开环控制和闭环控制对比实验,实验结果表明该系统对步进电机失步问题具有良好的调控效果。
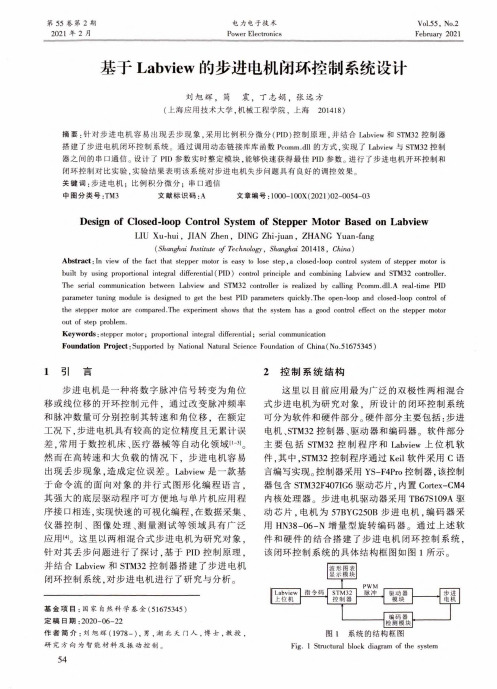
关键词:步进电机;比例积分微分;串口通信中图分类号:TM3文献标识码:A文章编号:1000-100X(2021)02-0054-03Design of Closed-loop Control System of Stepper Motor Based on Labview LIU Xu-hui,JIAN Zhen,DING Zhi-juan,ZHANG Yuan-fang(Shanghai Institute of Technology,Shanghai201418,China)Abstract:In view of the fact that stepper motor is easy to lose step,a closed-loop control system of stepper motor is built by using proportional integral differential(PID)control principle and combining Labview and STM32controller. The serial communication between Labview and STM32controller is realized by calling Pcomm.dll.A real-time PID parameter tuning module is designed to get the best PID parameters quickly.The open-loop and closed-loop control of the stepper motor are compared.The experiment shows that the system has a good control effect on the stepper motor out of step problem.Keywords:stepper motor;proportional integral differential;serial communicationFoundation Project:Supported by National Natural Science Foundation of China(No.51675345)1引言步进电机是一种将数字脉冲信号转变为角位移或线位移的开环控制元件,通过改变脉冲频率和脉冲数量可分别控制其转速和角位移,在额定工况下,步进电机具有较高的定位精度且无累计误差,常用于数控机床、医疗器械等自动化领域〔7。
使用LabVIEW进行电机控制实现电机的速度和位置控制
使用LabVIEW进行电机控制实现电机的速度和位置控制LabVIEW是一种功能强大的图形化编程环境,被广泛应用于各种工程领域中,包括电机控制。
本文将介绍如何使用LabVIEW进行电机控制,实现对电机的速度和位置控制。
一、LabVIEW概述LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器(National Instruments)公司开发的一款图形化编程环境。
其特点是可视化、易学易用,拥有许多强大的图形化编程工具和函数库,可以帮助工程师和科学家快速进行系统设计、数据采集、信号处理等工作。
二、LabVIEW中的电机控制1.速度控制要实现电机的速度控制,首先需要连接一个编码器或旋转传感器来获取电机的转速信息。
在LabVIEW中,可以使用DAQmx函数库中的函数来获取传感器的信号,并通过PID控制算法实现精准的速度控制。
在LabVIEW中创建一个新的VI(Virtual Instrument),然后从函数面板中选择相应的DAQmx函数,如"DAQmx Create Channel"来创建用于接收编码器信号的虚拟通道。
接着,可以使用"DAQmx Read"函数获取传感器的转速信号。
最后,通过编写PID控制算法,使用"PID.vi"函数来实现电机的速度控制。
2.位置控制要实现电机的位置控制,需要连接一个位置传感器,如光电编码器或磁编码器,并通过反馈控制算法实时检测电机的位置,并根据设定值进行控制。
在LabVIEW中,可以使用Encoder和PID函数库来实现电机的位置控制。
在LabVIEW中创建一个新的VI,然后在函数面板中选择Encoder 函数库中的函数,如"Initialize Encoders"来初始化编码器。
接着,使用"Read Encoder"函数实时读取电机的位置信息,并通过PID控制算法计算出控制信号。
LabVIEW在电机控制中的应用实现精准的电机控制
LabVIEW在电机控制中的应用实现精准的电机控制LabVIEW是一款基于图形化编程界面的开发环境,广泛应用于工业自动化领域。
在电机控制中,LabVIEW以其强大的实时性、易用性和可扩展性,成为了实现精准电机控制的理想选择。
一、LabVIEW的基本原理和特点LabVIEW采用了数据流图(Dataflow Diagram)的编程方式,通过将程序分为不同的模块,用图形化的图标表示不同的功能和算法,实现模块之间的数据交互和控制。
这种图形化的编程方式使得LabVIEW非常易于学习和使用。
LabVIEW具有以下几个特点:1. 强大的数据采集和处理功能:LabVIEW提供了丰富的传感器接口和数据采集模块,可以方便地获取电机的各种参数,如速度、转矩、温度等。
同时,LabVIEW还提供了丰富的信号处理和分析工具,可以对采集到的数据进行滤波、谐波分析等操作。
2. 高度可扩展性:LabVIEW支持与其他硬件设备和软件系统的连接,可以通过各种接口和协议与外部设备进行通信,实现与其他组件的集成,提高整个系统的可扩展性和灵活性。
3. 实时性能强:LabVIEW具有出色的实时性能,能够实时获取电机的状态并做出相应的控制。
这对于电机控制来说至关重要,因为电机反应速度非常快,需要实时采集和处理数据,才能实现精准控制。
二、LabVIEW在电机控制中的具体应用1. 电机控制算法的实现:LabVIEW提供了丰富的控制算法和函数模块,可以根据具体的需求,选择合适的算法进行电机控制,如PID控制、模糊控制等。
利用LabVIEW强大的数据处理能力,可以实现对控制算法的灵活调整和优化,从而提高电机控制的精度和稳定性。
2. 电机状态监测和保护:LabVIEW可以通过采集电机运行时的各种参数,实时监测电机的状态,如温度、电流、转速等。
当电机运行参数异常时,LabVIEW可以通过设定相应的报警和保护机制,及时采取措施避免电机受损。
3. 远程监控和控制:LabVIEW支持与其他设备和系统进行远程通信,可以实现对电机的远程监控和控制。
利用LabVIEW进行电机控制与调试
利用LabVIEW进行电机控制与调试LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一款基于图形化编程语言的开发环境,广泛应用于科学与工程领域的数据采集、分析、控制以及调试等方面。
本文介绍如何利用LabVIEW进行电机控制与调试,包括步进电机和直流电机的控制方法以及相关调试技巧。
一、步进电机控制步进电机是一种离散控制的电机,通过对电机驱动成组的正向或反向脉冲信号,实现旋转角度的精确控制。
LabVIEW提供了丰富的工具和函数来实现步进电机的控制。
首先,在LabVIEW中创建一个新的VI(Virtual Instrument)文件。
在Block Diagram中选择一个While Loop,并在循环内部添加若干个控制步进电机运动的代码。
例如,可以通过控制单个IO口的高低电平来实现脉冲信号的输出。
使用LabVIEW中的Digital Output模块,将其配置为输出模式,并将其与步进电机驱动器的脉冲接口连接。
然后,在每次循环迭代中,将该IO口的电平设置为高电平,然后延时适当时间,再将其设置为低电平,即可输出一个脉冲信号。
此外,还可以通过使用计数器或定时器模块来生成脉冲信号。
LabVIEW中的Counter和Timer模块可以方便地设置计数器的初值、计数范围以及计数速率。
通过适当的配置和调试,可以实现步进电机的精确控制。
二、直流电机控制直流电机是一种常见的电动机类型,广泛应用于各种机械设备中。
LabVIEW也提供了多种方法来实现直流电机的控制。
首先,在LabVIEW中创建一个新的VI文件。
使用LabVIEW中的Analog Output模块来生成电机驱动信号。
将Analog Output模块与直流电机驱动器的控制端口连接,通过调整模块输出的电压值,可以实现对直流电机的转速和方向的控制。
LabVIEW还提供了PID控制器模块,可用于进一步优化直流电机的控制效果。
LabVIEW程序控制步进电机说明

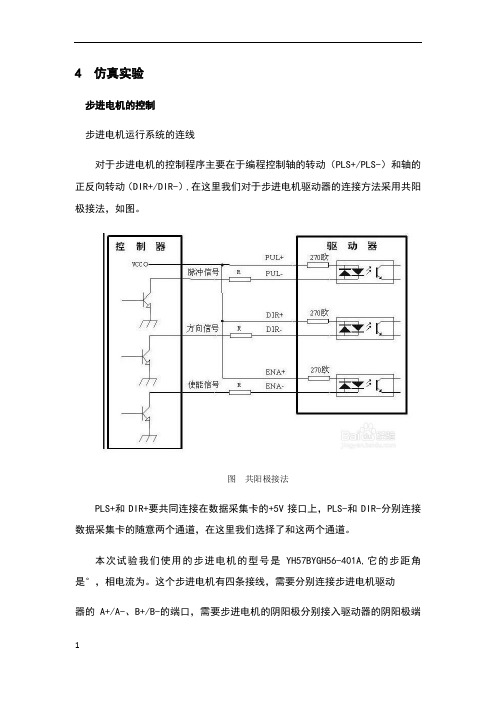
4 仿真实验4.1 步进电机的控制4.1.1 步进电机运行系统的连线对于步进电机的控制程序主要在于编程控制轴的转动(PLS+/PLS-)和轴的正反向转动(DIR+/DIR-),在这里我们对于步进电机驱动器的连接方法采用共阳极接法,如图4.1。
图4.1 共阳极接法PLS+和DIR+要共同连接在数据采集卡的+5V接口上,PLS-和DIR-分别连接数据采集卡的随意两个通道,在这里我们选择了P0.0和P0.1这两个通道。
本次试验我们使用的步进电机的型号是YH57BYGH56-401A,它的步距角是1.8°,相电流为2.8A。
这个步进电机有四条接线,需要分别连接步进电机驱动器的A+/A-、B+/B-的端口,需要步进电机的阴阳极分别接入驱动器的阴阳极端口。
对于分辨接线接入驱动器是否正确,我们可以将其中两根线的金属外部用手捏在一起,转动步进电机的轴,如果很难转动那么说明这两根线可以接入A+/A-或B+/B-的接口中,如果顺利转动则需换线继续尝试知道难以转动。
驱动器需要接入电源运行,+V接入+25V,GND接地,如图4.2。
这个部分具体的运行过程就是电脑控制程序给数据采集卡一个连续脉冲信号,由采集卡传递到驱动器的DIR端口,再通过DIR-来输出到步进电机,从而导致步进电机轴的转动。
图4.2 步进电机驱动器端口当驱动器的灯是红色时说明出现故障需要及时排查,电机轴失去自锁力。
绿灯亮起则可以正常工作。
4.1.2 步进电机驱动器的设置驱动器的设置主要是通过驱动器右侧8个上下拨动开关键来控制,SW1、SW2、SW3控制电流大小,SW4控制选择静态半流(OFF)或静态全流(ON),剩下的SW5到SW6是决定驱动器的细分程度,如图4.3。
图4.3 驱动器的细分细分是控制精度的标志,通过增大细分能改善精度。
细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
细分驱动模式具有低速振动极小和定位精度高两大优点。
LAB控制步进电机简单运动
一. 基于LABView的运动控制软件开发的流程LABView是一款应用十分广泛的软件,应用它可以完成许多功能,例如:数值分析、信号处理和设备驱动等。
因此在它的基础上,进行运动控制软件的开发具有十分重要的意义。
通过本实验,我认为基于LABView的开发流程是:确定控制任务→确定控制方法→选择硬件→连接硬件→编制程序框图→调试验证二. 本次试验中所设计的虚拟界面所完成的软件功能本次试验中,我所编制的的程序框图中,采用了while循环。
在while循环中,多次应用了条件结构,层叠式顺序结构,完成程序的大体结构。
调用MPC07的函数,完成具体的控制。
在前面板中,应用了“数值输入控件”,完成在控制过程中数据的输入,应用了“开关按钮”,达到在调试过程中的控制。
总之,虚拟界面完成了调用条件结构,层叠式顺序结构,调用MPC07的函数,对轴的选择,检测,初始化,以及速度的设定,控件的应用。
三. 在LABView的平台上调用MPC07运动控制卡的函数的开发步骤(1)首先必须了解MPC07所提供的函数,其中他提供的库函数德单位和返回值如下:单位●位移(或距离)的单位为P(Pulse),即脉冲数;●速度的单位是PPS(Pulse/sec),即脉冲/秒;●加速度和减速度的单位是PPSS(Pulse/sec2),即脉冲/秒2。
函数返回值运动库中的大多数函数是整型函数,它们的返回意义如下:0 函数执行正确;-1 函数执行错误。
(2)本次试验中主要用到了:int auto_set(void) /自动检测和自动设置控制卡/int init_board(void)/对控制卡硬件和软件初始化/set_conspeed /用来设置一个轴在常速运动时的速度/con_pmove /一个轴以常速做点位运动/con_vmove /一轴以常速连续运动/(3)通过对这些函数的调用,完成了本次试验的一维运动控制。
因此,在在LABView的平台上调用MPC07运动控制卡的函数的开发步骤是:1.了解MPC07所提供的函数。
基于LabVIEW的步进电机控制系统设计
目录摘要 (II)Abstract ....................................................................................................... I II 目录.. (I)第1章绪论 (1)1.1课题研究的意义及现状 (1)1.2论文主要研究内容 (3)第2章步进电机控制系统总体方案设计 (4)2.1步进电机控制系统的方案选择 (4)2.2步进电机控制系统的开发软件选择 (6)第3章步进电机控制系统硬件的设计 (9)3.1概述 (9)3.2硬件的选择 (9)3.3硬件连线 (23)第4章步进电机控制系统软件的设计 (24)4.1软件编程环境的建立 (24)4.2“连续运行”VI的编程 (25)4.3“指定角度运行”VI的编程 (26)4.4主程序的编程 (27)4.5前面板的设计 (32)第5章实验 (34)5.1接线 (34)5.2软件调试 (36)5.3调试过程的总结 (37)结论 (38)参考文献 (39)致谢 (41)附件1 (42)附件2 (51)摘要步进电机作为执行机构,是机电一体化的关键产品之一。
步进电机突出的优点是它可以在宽广的频率范围内,通过改变脉冲频率来实现调速,快速起停、正反转控制等,并且由其组成的开环系统既简单、廉价,又非常可靠,广泛地应用在各种计算机控制的自动系统中。
随着微电子和计算机技术的发展,步进电机的需求和应用量与日俱增。
本文研究了步进电机的工作原理,对步进电机控制系统进行了整体方案的设计、硬件的选择及接线;在学习了LabVIEW的基础上,研究了LabVIEW FPGA模块的编程和应用;对PXI-7833R板卡进行了全面的学习,研究了如何使用LabVIEW对FPGA板卡进行编程;通过LabVIEW完成产生频率可调的脉冲信号和布尔信号的程序,经编译后下载到PXI-7833R板卡,以实现步进电机控制脉冲及方向信号的生成;完成了步进电机控制系统的软件设计,包括前面板设计、连续运转和指定角度运转程序以及步进电机启动和停止过程的加减速程序。
基于LabVIEW的步进电机状态控制
随着机电在工业、农业等领域的广泛应用,步进机电也越来越到多地运用到众多领域。
步进机电是一种将电脉冲信号转换为角位移的机电元件,与其它类型机电相比具有易于精确控制、无积累误差等优点, 它可以在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反转控制等. 步进电动机必须和驱动控制器配合使用,而不能直接接到交直流电源上工作, 步进机电的控制以数字I/O接口卡作为硬件基础,采用软件程序来实现步进机电的同步精确运动控制。
这种控制方法的关键是软件程序,软件程序的好坏将决定是否能实现步进机电的控制。
本设计采用PC机控制,通过PXI总线与步进机电相连, PC 上的操作界面采用LabVIEW 编写,文中简要概述虚拟仪器技术LabVIEW软件的特点,通过运用LabVIEW 图形编程语言设计步进机电的简单控制系统,介绍虚拟仪器编程的普通过程和方法。
这种用LabVIEW设计的系统具有控制灵便、人机交互性强、界面友好、操作方便等特点。
本系统的设计为虚拟仪器的设计寻觅了一种普遍的方法。
步进机电, LabVIEW,PXI总线步进机电又称为脉冲电动机或者阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或者线位移的开环控制元件。
单片机控制的步进机电广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。
随着经济的发展,技术的进步和电子技术的发展,步进机电的应用领域更加广阔,同时也对步进机电的运行性能提出了更高的要求。
传统的步进机电控制系统用PLC或者单片机来控制步进机电,不仅电路复杂,控制精度不高,硬件连接后不易调整、灵便性差,不能实时地满足用户对控制系统的要求。
而且编程也比较难,非专业技术人员不易掌握。
因此,传统的步进机电系统具有很大的局限性,已经不能满足时代发展的需求。
现在的步进机电系统多数选用LabVIEW软件对步进机电进行控制。
LabVIEW(Laboratory Virtual instrument Engineering Workbench)是一种图形化的编程语言的开辟环境,它广泛地被工业界、学术界和研究实验室所接受,视为一个标准的数据采集和仪器控制软件。
LabVIEW程序控制步进电机说明
4 仿真实验步进电机的控制步进电机运行系统的连线对于步进电机的控制程序主要在于编程控制轴的转动(PLS+/PLS-)和轴的正反向转动(DIR+/DIR-),在这里我们对于步进电机驱动器的连接方法采用共阳极接法,如图。
图共阳极接法PLS+和DIR+要共同连接在数据采集卡的+5V接口上,PLS-和DIR-分别连接数据采集卡的随意两个通道,在这里我们选择了和这两个通道。
本次试验我们使用的步进电机的型号是YH57BYGH56-401A,它的步距角是°,相电流为。
这个步进电机有四条接线,需要分别连接步进电机驱动器的A+/A-、B+/B-的端口,需要步进电机的阴阳极分别接入驱动器的阴阳极端口。
对于分辨接线接入驱动器是否正确,我们可以将其中两根线的金属外部用手捏在一起,转动步进电机的轴,如果很难转动那么说明这两根线可以接入A+/A-或B+/B-的接口中,如果顺利转动则需换线继续尝试知道难以转动。
驱动器需要接入电源运行,+V接入+25V,GND接地,如图。
这个部分具体的运行过程就是电脑控制程序给数据采集卡一个连续脉冲信号,由采集卡传递到驱动器的DIR端口,再通过DIR-来输出到步进电机,从而导致步进电机轴的转动。
图步进电机驱动器端口当驱动器的灯是红色时说明出现故障需要及时排查,电机轴失去自锁力。
绿灯亮起则可以正常工作。
步进电机驱动器的设置驱动器的设置主要是通过驱动器右侧8个上下拨动开关键来控制,SW1、SW2、SW3控制电流大小,SW4控制选择静态半流(OFF)或静态全流(ON),剩下的SW5到SW6是决定驱动器的细分程度,如图。
图驱动器的细分细分是控制精度的标志,通过增大细分能改善精度。
细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
细分驱动模式具有低速振动极小和定位精度高两大优点。
对于有时需要低速运行(即电机转轴有时工作在60rpm以下)或定位精度要求小于度的步进应用中,细分驱动器获得广泛应用。
LabVIEW程序控制步进电机说明

4 仿真实验4.1 步进电机的控制4.1.1 步进电机运行系统的连线对于步进电机的控制程序主要在于编程控制轴的转动(PLS+/PLS-)和轴的正反向转动(DIR+/DIR-),在这里我们对于步进电机驱动器的连接方法采用共阳极接法,如图4.1。
图4.1 共阳极接法PLS+和DIR+要共同连接在数据采集卡的+5V接口上,PLS-和DIR-分别连接数据采集卡的随意两个通道,在这里我们选择了P0.0和P0.1这两个通道。
本次试验我们使用的步进电机的型号是YH57BYGH56-401A,它的步距角是1.8°,相电流为2.8A。
这个步进电机有四条接线,需要分别连接步进电机驱动器的A+/A-、B+/B-的端口,需要步进电机的阴阳极分别接入驱动器的阴阳极端口。
对于分辨接线接入驱动器是否正确,我们可以将其中两根线的金属外部用手捏在一起,转动步进电机的轴,如果很难转动那么说明这两根线可以接入A+/A-或B+/B-的接口中,如果顺利转动则需换线继续尝试知道难以转动。
驱动器需要接入电源运行,+V接入+25V,GND接地,如图4.2。
这个部分具体的运行过程就是电脑控制程序给数据采集卡一个连续脉冲信号,由采集卡传递到驱动器的DIR端口,再通过DIR-来输出到步进电机,从而导致步进电机轴的转动。
图4.2 步进电机驱动器端口当驱动器的灯是红色时说明出现故障需要及时排查,电机轴失去自锁力。
绿灯亮起则可以正常工作。
4.1.2 步进电机驱动器的设置驱动器的设置主要是通过驱动器右侧8个上下拨动开关键来控制,SW1、SW2、SW3控制电流大小,SW4控制选择静态半流(OFF)或静态全流(ON),剩下的SW5到SW6是决定驱动器的细分程度,如图4.3。
图4.3 驱动器的细分细分是控制精度的标志,通过增大细分能改善精度。
细分能增加电机平稳性,通常步进电机都有低频振动的特点,通过加大细分可以改善,使电机运行非常平稳。
细分驱动模式具有低速振动极小和定位精度高两大优点。
基于Labview与微控制器步进电机控制系统设计
工业技术科技创新导报 Science and Technology Innovation Herald69DOI:10.16660/ki.1674-098X.2005-5453-8697基于Labview与微控制器步进电机控制系统设计①王庐山(湖北工业职业技术学院智能工程学院 湖北十堰 442000)摘 要:Labview是一款非常优秀的图形编程开放平台,很容易设计出非常好的上位机软件,可以在多个平台上运行。
微控制器可以很方便地进行底层驱动的设计。
本文将两者融合,开发Labview与微控制器步进电机控制系统,可以实现Labview上位机对步进电机的转速、方向进行全方位的控制,从而实现远程控制。
经实际运行,系统能够较好地控制步进电机,可用于上位机对步进电机控制场合。
关键词:Labview 步进电机 微控制器 远程控制 上位机中图分类号:TP273.5 文献标识码:A 文章编号:1674-098X(2020)09(c)-0069-03Design of Stepping Motor Control System Based on Labview andMicrocontrollerWANG Lushan(School of Mechanical and Electrical Engineering,Hubei Industrial Polytechnic, Shiyan,Hubei Province, 442000 China)Abstract: Labview is a very excellent graphic programming open platform. It is easy to design a very good upper computer software, which can run on multiple platforms. The microcontroller can easily design the bottom driver. In this paper, the integration of the two, the development of Labview and microcontroller stepper motor control system, which can achieve the upper computer Labview stepper motor speed, direction of all-round control, so as to achieve remote control. After practical operation, the system can control the stepping motor better, and can be used in the upper computer to control the stepping motor.Key Words: Labview; Stepper motor; Microcontroller; Telecontrol; Upper monitor①作者简介:王庐山(1975—),男,汉族,湖北十堰人,本科,讲师,研究方向为嵌入式应用开发。
利用LabVIEW进行运动控制和机器视觉
利用LabVIEW进行运动控制和机器视觉LabVIEW是一款功能强大的图形化编程环境,可用于各种工程和科学应用。
其中,运动控制和机器视觉是LabVIEW的两个重要应用领域。
本文将介绍如何利用LabVIEW进行运动控制和机器视觉的开发,以及相关的技术和方法。
一、LabVIEW运动控制运动控制是一种控制机器或设备进行精确位置和速度控制的技术。
利用LabVIEW进行运动控制可以实现机器人的精确运动、生产线的自动化以及其他众多应用。
1. LabVIEW的运动控制模块LabVIEW提供了运动控制模块,通过该模块可以实现对各种运动设备的控制,包括伺服电机、步进电机、运动控制卡等。
利用该模块,可以轻松地编写程序进行运动控制应用的开发。
2. 运动控制的基本原理运动控制的基本原理是通过对电机施加适当的电流或电压来控制其转动。
LabVIEW通过调节输出信号的强度、频率和方向来实现对电机的控制。
3. 运动控制案例举例来说,我们可以利用LabVIEW实现一个小车的运动控制系统。
通过连接运动控制硬件和编写LabVIEW程序,可以实现对小车的精确控制,包括前进、后退、转弯等功能。
二、LabVIEW机器视觉机器视觉是利用摄像机和图像处理技术对物体进行识别、检测和分析的技术。
LabVIEW具有强大的图像处理功能,可以广泛应用于机器视觉领域。
1. LabVIEW的图像处理工具LabVIEW提供了丰富的图像处理工具,包括图像采集、图像处理、特征提取等功能。
通过这些工具,可以对图像进行处理和分析,实现机器视觉应用的开发。
2. 机器视觉的基本原理机器视觉的基本原理是通过对图像进行分析和处理,提取出有用的特征信息,实现对物体的识别和检测。
LabVIEW通过其图像处理工具包和丰富的函数库,提供了开发机器视觉应用所需的全部功能。
3. 机器视觉案例一个常见的机器视觉应用是自动检测和分类产品。
利用摄像机和LabVIEW的图像处理工具,可以对产品进行拍照,并通过分析图像中的特征进行自动分类和判定。
基于LabVIEW的电气工程实验教学案例分析
基于LabVIEW的电气工程实验教学案例分析电气工程是现代工程领域中不可或缺的学科之一。
为了培养学生的实践动手能力和解决问题的能力,在电气工程实验教学中,教师需要设计并开展相应的实验案例。
LabVIEW作为一种用于数据采集与控制的开发环境和编程语言,提供了出色的图形化编程界面和丰富的工具箱,为电气工程实验教学提供了极大的便利。
本文将以基于LabVIEW 的电气工程实验教学案例为切入点,分析其优点和应用。
实验案例1:LED亮度调节LED亮度调节实验是电气工程实验教学中常见的实验之一。
通过LabVIEW编程和数据采集板,可以实现对LED的亮度进行控制。
学生可以通过调整程序中的参数,实时地观察到LED的亮度变化。
这种基于LabVIEW的实验案例具有以下优点:1. 图形化编程界面:LabVIEW提供直观的编程界面,学生可以通过拖拽和连接已有的模块来构建程序,不需要编写繁琐的代码。
这使得学生更容易理解和掌握实验原理和过程。
2. 实时反馈:LabVIEW采集板能够实时获取传感器数据并进行处理,再将结果反馈给用户。
在LED亮度调节实验中,学生可以通过LabVIEW界面中的滑动条来调整LED的亮度,同时可以实时看到LED的亮度变化。
这种实时反馈有助于学生更好地理解和掌握实验的原理和操作。
3. 可扩展性:LabVIEW提供了众多的工具箱和功能模块,可以方便地扩展实验案例的功能和复杂度。
对于电气工程教学来说,这意味着可以设计更加具有挑战性和实用性的实验案例,提高学生的动手实践能力和解决问题的能力。
除了LED亮度调节实验,基于LabVIEW的电气工程实验教学还可以包括如下案例:实验案例2:步进电机控制步进电机是电气工程中常见的执行器之一。
通过LabVIEW编程和数据采集板,学生可以实现对步进电机的控制,通过调整程序中的参数,控制步进电机按照设定的角度旋转。
这种实验案例可以帮助学生更深入地了解步进电机的工作原理和控制方法。
使用LabVIEW进行运动控制实现精准的位置和速度控制
使用LabVIEW进行运动控制实现精准的位置和速度控制近年来,随着工业自动化的快速发展,运动控制技术在各个领域的应用日益广泛。
而LabVIEW作为一种强大的图形化开发环境,可以帮助工程师们实现精准的位置和速度控制,具有很高的实用性和灵活性。
本文将介绍如何使用LabVIEW进行运动控制,实现精准的位置和速度控制。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种用于快速进行系统测量和控制的图形化开发环境。
它允许使用者通过图形化编程而非传统的文本编程方式来开发应用程序,极大地提高了开发效率和易用性。
二、运动控制基础知识在进行实际的运动控制之前,我们首先需要了解一些基本的运动控制概念。
1. 位置控制:即控制物体在运动过程中的位置,使其精确地到达目标位置。
2. 速度控制:即控制物体在运动过程中的速度,使其按照既定速度运行。
3. 加速度控制:即控制物体在运动过程中的加速度,使其具有平稳的加速和减速过程。
三、LabVIEW中的运动控制LabVIEW提供了丰富的运动控制函数和工具箱,使得进行精准的位置和速度控制变得更加简单和便捷。
1. 运动控制模块(Motion Control Module):该模块提供了一系列用于控制运动装置的函数和工具箱。
我们可以通过该模块实现对电机、伺服、步进驱动器等设备的运动控制。
2. 实时运动控制器(Real-Time Control Module):该模块基于实时操作系统RTX和硬实时通信,实现了精确的实时运动控制。
能够满足更高精度、更快速度的运动要求。
四、使用LabVIEW进行位置控制下面以步进电机为例,介绍如何使用LabVIEW进行位置控制。
1. 配置硬件:将步进电机与控制器连接,并确保硬件配置无误。
2. 创建控制程序:在LabVIEW中创建一个新项目,选择合适的步进电机控制器和驱动器。
基于LABVIEW的步进电机控制系统硬件结构

基于LABVIEW的步进电机控制系统硬件结构基于LABVIEW的步进电机控制系统硬件结构虚拟仪器是通过编制不同的测试软件来构成任何一种仪器,而不是某几种仪器.例如激励信号可先由微机产生数字信号,再经D/A变换产生所需的各种模拟信号,一块DAQ卡可以完成A/D转换、D/A转换、数字输入输出、记数器/定时器等多种功能,再配以相应的信号调理电路组件,即可构成能生成各种虚拟仪器的硬件平台,现在的虚拟仪器硬件系统还扩展了和各种仪器的接口,例如BG、VXI总线仪器、PC总线仪器以及带有RS-232接口的仪器或仪器卡,虚拟仪器与传统仪器最大的不同之处,就在于应用的灵活性上.虚拟仪器是用户自己定义的,用户可以将各种计算机平台、硬件、软件和附备件结合起来,组装成所需要的应用设备。
它的界面和功能与真的仪器十分相似,一个LabView程序有交互式用户接口,数据流框图,和图表连接端口组成,各部分的功能如下:1、前面板可以包含旋钮,刻度盘,开关,图表和其他界面工具,允许用户通过键盘或鼠标获取数据并显示结果;LabView程序从数据流框图接受指令;LabView程序模块化特征。
一个vi既可以作为上层的独立程序,也可以作为其他程序的子程序。
当一个LabView程序作为子程序,称为subvi。
LabView程序图表和连接端口的功能就像一个图形化参数列表,可以在LabView程序和subvi之间传递数据。
2、每块运动控制卡可以控制四个步进电极,可以采取开环或闭环,可以控制加速度和减速度,可以是速度控制,位置控制,或者是以一步为单位进行控制,方便灵活.3、要控制多于四块的运动控制卡只需要多插一块运动控制卡4、用于不同的控制用途只要改变一下控制框图即可.正是因为上述的原因,LabView最佳的实现了模块化编程思想,用户可以根据自己的需要选择系统配置。
LABVIEW 步进电机

实验二:步进电机实验实验目的:1、了解步进电机的工作原理及控制方法2、掌握LabVIEW软件设计控制步进电机的编程方法实验设备:实验主机箱、步进电机模块实验原理:1、硬件描述(1)步进电机的控制原理∙步进电机有三线制、五线制、六线制三种,但其控制方式均相同,必须以脉冲电流来驱动。
若每旋转一圈以20个励磁信号来计算,则每个励磁信号前进18度,其旋转角度与脉冲数成正比,正、反转可有脉冲顺序来控制。
∙步进电机的励磁方式可分为全部励磁及半步励磁,其中全部励磁又有1相励磁及2相励磁之分,而半步励磁又称1-2相励磁。
没输出一个脉冲信号,步进电机只走一步,因此,依序不断送出脉冲信号,就可以使步进电机连续转动。
本次实验利用的是2相励磁法,所以在此仅对2相励磁做简要介绍: 2相励磁法:在每一瞬间会有两个线圈同时导通,因其转矩打,振动小,故为目前使用较多的励磁方式,每送一励磁信号可走18度。
励磁顺序为AB→BC→CD→DA→AB如下图所示:STEP A B C D1 1 1 0 02 0 1 1 03 0 0 1 14 1 0 0 1电机的负载转矩与速度成反比,速度愈快负载转矩愈小,当速度快至某极限时,步进电机即不再运转。
所以在每走一步后,程序必须延时一段时间。
软件设计思路1、前面板设计:前面板包括电机的步数设定框、转向选择按钮、波形图。
如下图所示:2、框图程序设计分析:本实验程序设计了最常用的2相励磁法控制步进电机。
实验程序依次将真值表中的控制值写入数据采集卡,使数据采集卡的I/O口DO3、DO2、DO1、DO0依次输出高电平信号来触发步进电机转动。
实验程序框图利用公式节点输入公式y=t*t*t+6*t*t-5,输出接入波形图,在波形图中产生一个三次函数图形,将波形图的y坐标值提取出与时钟相连来控制步进电机的转速。
原理图如下所示:在前面板中运行程序时,在”波形图”中的三次函数图形上任选一点得到一y 值,该值传到控制‘步间延迟时间’的时钟处控制步进电机的转速,运行过程中可以通过拖动鼠标选择函数图像上不同的点即不同y值来改变步进电机的转速,y值越大说明步间延迟时间越长,电机转速越小,反之转速越大。
Labview 并口控制步进电机

LabVIEW 控制步进电机的并口通讯研究摘要:本文给出了基于LabVIEW 控制步进电机的方法, 讲述了控制系统的构成, 通过和其它控制步进电机方法的对比, 可以看出并口通讯的优势。
系统具有良好的软件交互界面, 编程简单, 运行高效, 有实际应用价值。
关键词:LabVIEW;步进电机;并口通讯1 前言在步进电机控制系统设计中, 传统的设计方法是用逻辑电路或单片机实现步进电机控制, 但由于线路复杂而且制成后不易调整, 所以存在一定的局限性。
后来采用虚拟仪器图形化编程软件压来控制步进电机, 硬件结构上变得十分简洁, 软件上编程简单, 而且有较好的人机交互界面, 根据不同的要求可随时调整控制方式。
与现在国内普遍采用的控制电机方式一用通过运动采集卡来控制步进电机相比, 本文采用的计算机并口作为连接机和步进电机驱动器的通讯媒介来传输脉冲信号的方式, 不仅价格低廉, 而且更加容易推广。
2.系统控制的研究方案2.1系统总体的电气控制结构图步进电机是整个系统运转的动力机构, 驱动控制系统包括两大部分, 一个是步进电机驱动部分,即硬件的驱动部分, 还有一个是机的软件驱动部分, 即用发的软件系统。
这两大部分用计算机并口线打印线接。
并口通讯在整个系统中完成软件和硬件的衔接的工作, 主要用作数据传输、控制以及数据采集等。
控制系统结构图如图所示整个的硬件控制系统是由几个单一功能的模块相互联系而组成的。
将系统模块化, 便得到各个模块在整个系统中所执行的功能。
其中电脑中安装了应用软件, 起控制电机的作用, 将通过算法得出的相应坐标量转换成电机转动量步进电机驱动器起将并口传输过来的脉冲信号进行转换、放大, 然后输送到步进电机, 来最终达到控制步进电机的作用。
2.2技术方案本设计使用的步进电机驱动器的驱动电路是经典的集成块组合电路, 双极性驱动二相永磁步进电机及二相四相合式步进电机。
主控制器采用机控制, 软件采用编写开发。
信号通讯媒介采用并口来实现。