用解析法设计凸轮廓线共20页文档
机械设计-凸轮轮廓曲线的设计
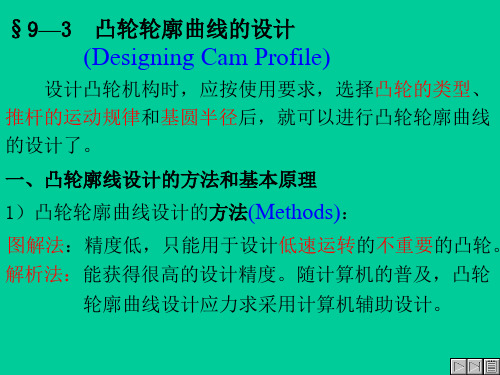
4.对心直动尖端从动件盘形凸轮轮廓设计 -ω 对心直动尖顶推杆凸轮机构中,已知凸轮的基圆半径r0,角速
度ω和推杆的运动规律,设计该凸轮轮廓曲线。
8’ 9’
ω
7’
11’
5’ 3’
1’
12’
13’ 14’
12345678 9 11 13 15
凸轮轮廓线的设计
凸轮轮廓曲线的设计
1 凸轮轮廓曲线的设计 2 凸轮机构设计中的几个问题
一、凸轮轮廓曲线的设计
1.设计方法 (1)图解法:直观,简单;但误差大,效率低,适用于不重要
的凸轮。 (2)解析法:精确,高效,可直接用于数控加工编程,适用于
高速和高精度凸轮。
2.反转法作图的原理 假设在整个机构上加上一个与凸轮角速度大小相等、 方向相反
7’
11’
5’ 3’
1’
12’
13’ 14’
1 3 5 7 8 9 11 13 15
设计步骤:
①选比例尺μl作基圆r0。 ②反向等分各运动角。原则是:陡密缓疏。 ③确定反转后,从动件滚子中心在各等份点的位置。
④将各中心点连接成一条光滑曲线。 ⑤作各位置滚子圆的内(外)包络线(中心轨迹的等距曲线)。
ω ω
压力角许用值
αmax≤[α]
推程: 移动从动件 [α] =30°, (当载荷小时 [α]=45°); 摆动从动件 [α] = 45°。 回程: 通常取[α] ≤ 70°~80°。
最大压力角可测量或计算确定。
用角度尺测量压力角
3、凸轮基圆半径的确定
➢ 基圆半径越小,凸轮的外廓尺寸越小。 ➢ 基圆半径越小,凸轮理论廓线的最小曲率半径越小,滚子凸轮的实际轮廓容易变
第4.3节(盘形凸轮廓线的设计)
第三节 盘形凸轮廓线的设计当根据工作要求和结构条件选定了凸轮机构的类型、从动件的运动规律和凸轮的基圆半径(其确定将在下节中介绍)等结构参数后,就可以设计凸轮的轮廓曲线。
凸轮廓线的设计方法有图解法和解析法,其设计原理基本相同。
本节先简要介绍图解法,后重点介绍解析法设计凸轮廓线。
一、凸轮廓线设计的基本原理图4-13 反转法设计凸轮廓线基本原理图4-13所示为一尖顶对心盘形凸轮机构,设凸轮以等角速度ω逆时针转动,推动从动件2在导路中上、下往复移动。
当从动件处于最低位置时,凸轮轮廓曲线与从动件在A 点接触,当凸轮转过1ϕ角时,凸轮的向径A A 0将转到A A '0位置,而凸轮轮廓将转到图中虚线所示的位置。
从动件尖端从最低位置A 上升至B ',上升的位移为B A S '=1,这是从动件的运动位移。
若设凸轮不动,从动件及其运动的导路一起绕A 0点以等角速度-ω转过1ϕ角,从动件将随导路一起以角速度-ω转动,同时又在导路中作相对导路的移动,如图中的虚线位置,此时从动件向上移动的位移为B A 1。
而且,11S B A B A ='=,即在上述两种情况下,从动件移动的距离不变。
由于从动件尖端在运动过程中始终与凸轮轮廓曲线保持接触,所以从动件尖端的运动轨迹即为凸轮轮廓。
设计凸轮廓线时,可由从动件运动位移先定出一系列的B 点,将其连接成光滑曲线,即为凸轮廓线。
由于这种方法是假设凸轮固定不动而使从动件连同导路一起反转,故称为反转法。
对其它类型的凸轮机构,也可利用反转法进行分析和凸轮廓线设计。
二、图解法设计凸轮廓线1. 移动从动件盘形凸轮廓线的设计(1)尖端从动件 图4-14a 所示为一偏置移动尖端从动件盘形凸轮机构。
设已知凸轮的基圆半径为b r ,从动件导路偏于凸轮轴心A 0的左侧,偏距为e ,凸轮以等角速度ω顺时针方向转动。
从动件的位移曲线如图4-14b 所示,试设计凸轮的轮廓曲线。
图4-14 尖端从动件盘形凸轮廓线设计依据反转法原理,具体设计步骤如下。
机械原理-凸轮轮廓曲线设计图解法

-ω
3’ 2’ 1’ ω O 1 2
1
2
3
3
直动从动件盘形凸轮轮廓的绘制
1.对心直动尖顶从动件盘形凸轮 已知凸轮的基圆半径r0,角速度ω 和从 动件的运动规律,设计该凸轮轮廓曲线。
4’ 5’ 6’
-ω ω
3’ 2’ 1’
7’
8’ 5 6 7 8
1 2 3 4
设计步骤: ①作基圆r0。
②反向等分各运动角,得到一系列与基圆的交点。
7’ 5’ 3’ 1’ 1 3 5 78 8’ 9’ 11’ 12’ 13’ 14’ 9 11 13 15
e
-ω
ω 15’ 15 14’14
k12 k11 k10 k9 k15 k14 k13
A
13’
12’
k1 13 k 12 k32 k8 k7k6 k5k4 11 10 9
O
注意:与前不同的是——过 各等分点作偏距圆的一系列 切线,即是从动件导路在反 转过程中的一系列位置线。
11’
10’ 9’
直动平底从动件盘形凸轮轮廓的绘制
直动平底从动件盘形凸轮轮廓的绘制
-
实际廓线
直动平底从动件盘形凸轮轮廓的绘制
-
实际廓线
③过各交点作从动件导路线,确定反转后从动件尖顶在各等分点的位置。 ④将各尖顶点连接成一条光滑曲线。
直动从动件盘形凸轮轮廓的绘制
2.对心直动滚子从动件盘形凸轮 已知凸轮的基圆半径r0,滚子半径 rT ,角速度ω 和从动件的运动规 律,设计该凸轮轮廓曲线。
3’ 2’ 1’ 7’ 8’ 1 2 3 4 5 6 7 8 4’
-ω
理论轮廓
ω
5’ 6’
凸轮轮廓设计—解析法
s
B’ h A o δ t t δs’ δ
一、从动件的常用运动规律 名词术语: 基圆半径、 推程、 基圆、 推程运动角、 远休止角、 回程、回程运动角、 近休止角、 行程。一个循环
D δs’
δh
r0
δt
δs δh
作者:潘存云教授
ω
B
δs
C
1.等速运动规律 在推程起始点:δ =0, s=0
3)偏置直动尖顶从动件盘形凸轮 已知凸轮的基圆半径r0,角速度ω 和从动件的运动规律和偏心距e, 设计该凸轮轮廓曲线。
7’ 5’ 3’ 1’ 1 3 5 78
e -ω
ω
k12 k11 k10 k9
8’
9’ 11’ 12’ 13’ 14’ 9 11 13 15
15’ 15 14’ 14 13’ 12’
y e rr s0 r0 ω e r0 y
O
-ω δ
x=x(δ ) y= y(δ )
B0
x
n θ x
偏置直动滚子推杆盘形凸轮机构
δδ
作者:潘存云教授
n
s
已知:r0、rr、e、ω、S=S(δ) 由图可知: s0=(r02-e2)1/2
x= (s0+s)sinδ y= (s0+s)cosδ
s0
+ ecosδ - esinδ
φ4
A4
φ6
A5
φ5
2.2.2
解析法设计凸轮的轮廓
图解法的缺点? 解析法的优点?
极坐标法求轮廓曲线的解析表达式--- 参数方程 偏置直动滚子推杆盘形凸轮机构 (反转原理+极坐标) 已知条件:e、rmin、rT、S2=S2(δ1)、ω1及其方向。 理论轮廓的极坐标参数方程:
摆动从动件圆柱凸轮廓线的解析法设计
摆动从动件圆柱凸轮廓线的解析法设计从动拼音【注音】: cong dong从颤抖表述【意思】:由其他零件带动的(零件)。
1、从颤抖齿轮的速度必须提升。
2、就我个人而言,我从倾听和阅读中学习,我也从动手中学习,大多数人不这样做。
3、可以选配具有电子—液压掌控的前、后从动桥,同时实现最佳的转弯半径。
4、我们通常从动理学中推断出分子反应机制。
5、表明低磁化效应的磁性铁粒子当磁性线圈不导电时,转矩不能从传动轴传导于从动轴。
6、汽车离合器由压盖总成和从动盘总成组成,其旋转强度是重要的质量评价指标。
7、动态空间鼓励大众从动的角度周围事物,把人带回一个由时空结合的第四空间,比如说光怪陆离的光影,生动的背景音乐。
8、某从动齿轮在中修时发现开裂。
9、运用有限元和试验模态分析结合的研究方法,创建离合器从动盘的线性化数学模型,分析研究其动态特性;10、以杆组分析方法为基础,结合转化机构原理及凸轮机构的相对速度理论进行从动件的速度和加速度分析。
11、研究了经逊于细化处置的镍粉对从动齿轮热处理工艺和性能的影响。
12、旋转式发动机:燃烧室、汽缸与从动轴一起围绕着连接活塞的固定控制轴旋转的内燃机。
13、本文利用复数表示法,得出结论从颤抖转子中心并作平面通常运动情况下的圆锥轮廓线的设计方法。
14、系统计算法常常用于设计凸轮和从动件机构以及分析其特性。
15、分析了转动从动件圆柱凸轮机构误差产生原因,创建了数学模型,并得出其实际运动规律的方程。
16、利用nurbs实现了凸轮轮廓曲线的重构,并给出基于运动仿真实现迅速反求空间凸轮机构从动件运动规律的方法。
17、按本文的方法设计特定速比函数,可使与主动滚子压板的从动圆锥轮廓线不能产生曲率干预。
18、从动件运动规律的设计是凸轮机构设计的基础。
19、本文找到了凹陷圆弧底直动从动件盘形凸轮与旧有凸轮之间的区别与联系,并统一了旧有凸轮的设计方法。
20、介绍离合器从动盘总成中的一种典型波形片零件的冲压工艺及弯曲成形模设计。
解析法设计凸轮轮廓曲线

由方程
x y
= =
(s0 (s0
+ +
s) sin d s) cosd
+ ecosd - e sin d
ü ý þ
可得
dx / dd = (ds / dd - e) sin d + (s0 + s) cosd ü
dy / dd
= (ds / dd
- e) cosd
- (s0
+
s)
sin
d
ý þ
sinq = (dx / dd ) / (dx / dd )2 + (dy / dd )2 ïü
ý
cosq = -(dy / dd ) / (dx / dd )2 + (dy / dd )2 ïþ
式中e为代数值: (1)当凸轮逆时针转动,推杆在O点右侧时,正偏置,取“+”号;
推杆在O点左侧时,负偏置,取“”号; (2)当凸轮顺时针转动,推杆在O点左侧时,正偏置,取“+”号;
推杆在O点右侧时,负偏置,取“”号;
2.对心平底推杆盘形凸轮机构
已知:基圆半径r0、s=s(d)、凸轮转动角 速度w。 建立图示坐标系,当凸轮转过d角, 推杆产生位移s,平底与凸轮在B点 相切,P为凸轮与推杆的相对瞬心。
n =n P = OPw
OP =n / w = ds / dd
B点的坐标为:
x y
= =
(r0 (r0
+ +
s) s)
解析法设计凸轮轮廓曲线
1.偏置直动滚子推杆盘形凸轮机构
已知:基圆半径r0、偏心距e、s=s(d)、凸 轮转动角速度w、滚子半径rr。
建立图示坐标系,当凸轮转过d角,推 杆产生位移s,采用反转法,确定滚子 中心在B点的坐标。
3.2凸轮轮廓设计ppt课件

一、凸轮廓线设计方法的基本原理
反转原理:
给整个凸轮机构施以-ω时,不影响各构件之间
的相对运动,此时,凸轮将静止,而从动件尖顶复合
运动的轨迹即凸轮的轮廓曲线。
-ω 1
依据此原理可以用几何作图的方法 3’
设计凸轮的轮廓曲线,
2’
2
1’
ω 1 2 潘存云教授
O
33
设计:潘存云
二、直动从动件盘形凸轮轮廓的绘制
若不满足此条件时:
增大r0 减小rr
4.平底尺寸l 的确定 作图法确定: l=2lmax+(5~7)mm
ω
1’ 2’
3’
同理,当导路位于中心左侧时,有:
OP= v/ω = [ds/dt] / [dδ/dt] =[ds/dδ]
∴ CP = ds/dδ
n
+ etgα=(OP+e)/BC
s
B
Dα
=(ds/dδ+e)/(s0+s) 其中: s0= r20 - e2
s0 ω r0
O 潘存云教授
P
C
设计:潘存云
n
∴ tgα = ds/dδ + e
正确偏置:导路位于与凸轮旋转方向ω相反的位置。 注意:用偏置法可减小推程压力角,但同时增大了回
程压力角,故偏距 e 不能太大。
错误偏置
n
αB
ω 设潘计存:云潘教存云授
o
e Pn
正确偏置
n B
α
ω0 P 潘存云教授 en
对心布置有:tgα=ds/dδ/ (r0+s)
设计时要求: α≤[α] 于是有:
1.对心直动尖顶从动件盘形凸轮 已知凸轮的基圆半径r0,角速度ω和 从动件的运动规律,设计该凸轮轮 廓曲线。
图解法设计凸轮轮廓

已知凸轮的基圆半径rmin,角速度ω、
e
从动件的运动规律和偏心距e,设计该
凸轮轮廓曲线。
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
ωA
15’15 14’14
13’ 12’
13 12
11
10
kk9k1k0k1181kk21k73k14k6O1k55k4kk3k21
的距离d,摆杆角位移方程,设计该凸轮轮廓曲线。
4’ 3’ 2’ 1’
12 3 4
5’ 6’
7’
8’ 5 67 8
d A8
A7
A
l B’1 B B1
rminω1
A1-ω1
φ1
B’2 B’3φ2
A2
B2 B3
B’φ4 3
120°B4A3来自φ790 °B8 B7
60 B6
B’7
设计:潘存云
°B5
B’6
B’5
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
理论轮廓
ω
设计:潘存云
设计步骤:
实际轮廓
①选比例尺μl作基圆rmin。 ②反向等分各运动角。原则是:陡密缓疏。
③确定反转后从动件尖顶在各等份点的位置。
④将各尖顶点连接成一条光滑曲线。
⑤作各位置滚子圆的内(外)包络线。
ρa-工作轮廓的曲率半径,ρ-理论轮廓的曲率半径,
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’10’ 11’ 12’
13’ 14’
9 11 13 15
-ω ω
设计:潘存云
033凸轮廓线设计
对于以参数方程 x x y y 表示
的凸轮理论轮廓线
dx
d
2
dx d 2 y
dy
d
dy
2 3/ 2 d2x
d d 2 d d 2
校核各点的曲率半径
温州大学机电工程学院
24
3-24
从动件偏置方向的选择
温州大学机电工程学院 3-17
机械原理 17
解析法设计凸轮轮廓曲线
机械原理
摆动滚子从动件盘形凸轮轮廓的设计
Y A0
0B
B0
B'
rp
O
ω
XB =OE-BG
-ω
=LOA *sin() -LAB *sin(0 + + )]
A YB=AE-AG
LAB
G =LOA *cos() - LAB *cos(0 + + )
凸轮机构的压力角 从动件在接触点所受力的方向
压力角
F
2
与该点速度方向所夹的锐角
F1 有效分力
越小传力越好
凸轮尺寸增大
无效分力 F2
v
自锁
max
推程时
r0
o
1
直动从动件 300 ~ 400 摆动从动件 400 ~ 500 回程时 700 ~ 800
移动滚子从动件盘形凸轮轮廓的设计
1)理论廓线方程
x KN KH (s0 s)sin e cos y BN MN (s0 s) cos esin 若为对心移动从动件,由于
e =0,s0=rb,故上式可写成
第10章 凸轮传动解析法
θ
n (x’,y’)
2 对心直动平底推杆盘形凸轮 建立坐标系如图:反转δ后,推杆移动距离为s, P点为相对瞬心, OP = ds/dδ x= (r0+s)sinδ +(ds/dδ)cosδ y= (r0+s)cosδ -(ds来自dδ)sinδy -ω
δ
B0 s0
ω
r0 O
B P s0
x
δ
ds/dδ s
B
y A0 φ0 φ
φ0
δ -ω
A
δ ω
O
a
x
浙江大学专用
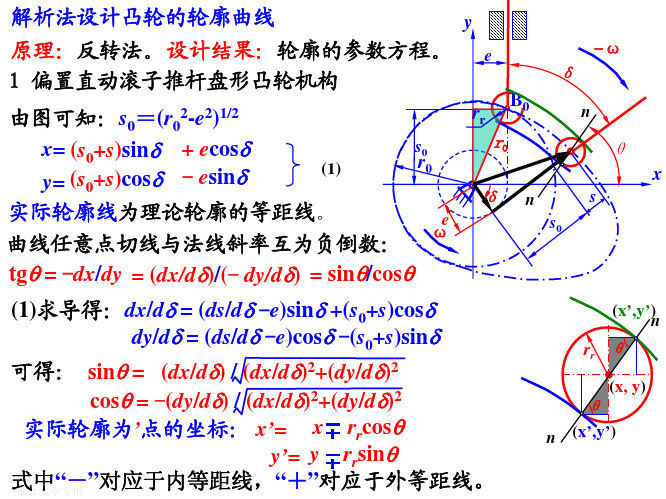
解析法设计凸轮的轮廓曲线 原理:反转法。设计结果:轮廓的参数方程。 1 偏置直动滚子推杆盘形凸轮机构 由图可知:s0=(r0 s0 x= (s0+s)sinδ + ecosδ r0 (1) y= (s0+s)cosδ - esinδ 实际轮廓线为理论轮廓的等距线。 e ω 曲线任意点切线与法线斜率互为负倒数: tgθ = -dx/dy = (dx/dδ)/(- dy/dδ) = sinθ/cosθ (1)求导得:dx/dδ = (ds/dδ -e)sinδ +(s0+s)cosδ dy/dδ = (ds/dδ -e)cosδ -(s0+s)sinδ
浙江大学专用
3 摆动滚子推杆盘形凸轮机构 理论廓线方程: x= asinδ - lsin(δ +ϕ +ϕ0) y= acosδ - lcos(δ +ϕ +ϕ0) 式中:a-中心距, l-摆杆长度 实际轮廓方程的求法同前。 对应点B’ 的坐标为: x’=x rrcosθ y’=y rrsinθ
B0 r0 l
2-e2)1/2
y
平底从动件盘形凸轮廓线的极坐标解析法设计

2 h = 一 一—万 ‘
从动件在回 一半 程后 作等减速运动时的 位移表 为. 3】 = 达式 娜l ( 【 .
在回程阶段的廓线长度 , 为: 。 ‘
1 , 土 =土
土
=
‘ +
=
在, 等 , = 令 则 等 中
= = =
等 (
,
一
从动件在推程后一半作等减速运动 时的位移表达式为:【 嗍 删
豢 …僦 ( 鼬
= 、 土
在推程阶段 的廓线长度 , : 为
, =
Ⅲ 一h 训 2 却
=
f 1 l 2 + ’ : 则
时, : 一 2 h
在‘中 : 在f中 令 l, ’
一却 等.
4 h
当 =
譬 = ; 椭
2 ^
+
4 h
2 k
:
4 h
2 k
+
4 h
.
5 . 4
维普资讯
河 西学 院学 报
23 简谐运 动 .
2 . 推程 .1 3
20 年第 2 07 期
从动件作 简谐运动 时的推程位移线图如下:13 21 1 1
平底从动件盘形凸轮廓线的极坐标解析法设计
王 学 志
( 河西学院机电工程系 ,f- 张掖 lg - - 740 ) 300
摘
要: 针对盘形凸轮廓线设计工作量大和设计精度较低的问题 ,以从动件的等速运动,等加速等减速运
动,简谐运动,摆线运动的位移表达式出发,提出用极坐标矢量解析法设计平底从动件盘形凸轮廓线,并且利用
凸轮机构的运动过程简图如下:
j 8
矗
。
0 \
根据上 图,建立 出在实际轮廓线 上 B点的极坐标 为:
凸轮轮廓曲线的设计
2)过辅助圆上B0点作该辅助圆的切线,该切线即为 从动件导路中心线的位置线。该位置线与基圆相交于 A0点,点A0即是从动件的初始位置,如图7-15(a)。
3)连接O A0。从O A0开始,沿(-ω)方向在基圆 上依次量取凸轮各转角δ0、δs、δ’0、δ’s,再将 推程角δ0、回程角δ’0分成与位移线图相同的等份, 得到A1、A2、A3、…等各点。
(7-6)
3.压力角与传力性能
在设计凸轮机构时,应使最大压力角αmax不超过某 一许用值[α],即
αmax≤[α]
(7-7)
工程上,一般推程阶段许用压力角[α]的推荐值分别为
移动从动件 [α]=30°~40°
摆动从动件 [α]=40°~50°
机械设计基础
Machine Design Foundation
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
图7-13对心滚子移动从动件盘形凸轮轮廓的绘制
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
图7-14平底从动件盘形凸轮轮廓的绘制
机械设计基础
Machine Design Foundation
凸轮轮廓曲线的设计
4.基圆半径 rb的确定
在选取基圆半径时,应综合考虑下述几个方面:
(1)在保证αmax≤[α]的前提下,应尽可能选用较 小的基圆半径,以满足结构紧凑的要求。
(2)为了满足凸轮结构及制造的要求,基圆半径rb 必须大于凸轮轴的半径rs,即rb> rs。
(3)为了避免从动件运动失真,必须使凸轮实际轮 廓曲线的最小曲率半径ρ’min大于零,通常规定ρ’min> 1~5 mm 。
033凸轮廓线设计讲解
0
0
0
0
温州大学机电工程学院
3-7
7
(4)过 c1 c2 c3 … 作偏距圆的一系列切线,这些切线 便是反转后从动件导路的一系列位置 (5)沿各切线自基圆开始量取从动件的相应位移量,即 得反转后尖底一系列位置 C1 B1 11 C2 B2 22 (6)光滑连接 B1 B2… 即的凸轮轮廓曲线
温州大学机电工程学院
3-13 13
机械原理
解析法设计凸轮轮廓曲线
所谓用解析法设计凸轮廓线,就是根据工作所要求的从 动件的运动规律和已知的机构参数,求出凸轮廓线的方 程式,并精确地计算出凸轮廓线上各点的坐标值
移动滚子从动件盘形凸轮轮廓的设计
1)理论廓线方程
x KN KH (s0 s) sin e cos y BN MN (s0 s) cos e sin
解析法设计凸轮轮廓曲线 摆动滚子从动件盘形凸轮轮廓的设计
Y
A0
-ω
0
2 2 2 1 LOA LAB rP 0 cos 2* L * L OA AB
B
LAB
B'
0
A
B0
1 tg
2 2 2 2 * LOA * LAB 2 L2 L r OA AB P 2 2 ( L2 L r OA AB P)
3-4
4
机械原理
反转法原理
温州大学机电工程学院
3-5
5
机械原理
作图法设计凸轮轮廓曲线 1、移动从动件盘形凸轮轮廓的设计
已知偏距为 ,基圆半径为 r0 ,凸轮以角速度 顺时针转动,从动件位移线图如下图所示,设计该 凸轮的轮廓曲线。
凸轮轮廓曲线的设计
这就是凸轮廓线设计的基本原理,这种方法称为“反转法”
二、用图解法设计凸轮轮廓曲线
1、偏置直动推杆尖顶盘形凸轮
已知:凸轮的r0=20mm,以ω 逆时针方向转 动,偏距e=10mm(导路偏于凸轮中 心的右侧),推杆的运动规律如下: 1 2 3 4 凸轮运动角δ 0°~120° 120°~180° 180°~270° 270°~360° 推杆的运动规律 等速上升h=15mm 在最高位置静止不动 余弦加速度下降h=15mm 在最低位置静止不动
6)分别以A1、A2、A3、……为中 心,从A1B1、A2B2、A3B3、…… 开始量取摆杆的角位移ψ1、ψ2、 ψ3、……(角位移方向与“-ω”相 同),得A1B1′、A2B2′、 A3B3′、……,得到点B1′、B2′、B3′、……[此即为摆动推杆得尖顶 在复合运动(既转又摆)中依次占据的位置]; 7)光滑连接B1′、B2′、B3′、 ……(此例中:B4′与B5′ 、B8与B之间 为圆弧),此即为所设计的凸轮轮廓曲线。
求:凸轮廓线。
作图步骤(procedure):
1)取位移比例尺μS=?(mm/mm)作s=s(δ ) 线图,并对s线图的δ 0、δ 0′分别作若 干等分,各分点编号为1、2、 3、……(注:等分的角增量应≤15°),δ
01、δ 02不作等分;
2)取作图比例尺μL(= μS ),以r0为半径作基圆、推杆的导路,导 路与基圆交点为A(尖顶的起始位置);
2、偏置直动滚子推杆盘形凸轮(图9-19) 已知:增加滚子半径rr,其他条件同上。
设计思路:把滚子中心A看作是尖顶推 杆凸轮机构的尖顶。Fra bibliotek作图步骤:
1)按尖顶设计方法定出滚子中心A在推杆 复合运动中依次占据的位置1′、2′、 3′、……,并连成光滑的曲线; 2)以光滑的曲线上的一些点为圆心, 以滚子半径rr为半径作一系列的圆;
[整理版]解析法设计凸轮
![[整理版]解析法设计凸轮](https://img.taocdn.com/s3/m/c243c3f9afaad1f34693daef5ef7ba0d4a736df6.png)
解析法设计凸轮Ⅱ的实际轮廓曲线代码:Private Sub Command1_Click()Form2.Show '焦点出现form2End SubPrivate Sub Command1_Click()Dim l1, l2, l3 As SingleForm2.Picture2.Scale (-0.1, 400)-(7, -400)l1 = -Abs(Form2.Picture1.ScaleHeight / Form2.Picture1.ScaleWidth)l3 = -Abs(Form2.Picture3.ScaleHeight / Form2.Picture3.ScaleWidth) '定义两个图框的高宽比Form2.Picture1.ScaleWidth = 9.5Form2.Picture3.ScaleWidth = 150 '设定图框的长度Form2.Picture1.ScaleHeight = l1 * Form2.Picture1.ScaleWidthForm2.Picture3.ScaleHeight = l3 * Form2.Picture3.ScaleWidthForm2.Picture1.ScaleLeft = -0.1Form2.Picture3.ScaleLeft = -70Form2.Picture1.ScaleTop = 7Form2.Picture3.ScaleTop = 63 '规定高度的起点Dim dt1, dt2, dt3, dt4, dt5, s1, v1, s2, v2, k1, s0 As SingleDim n, m As IntegerDim h, e As IntegerDim dt6, dt7, dt8, dt9, dt10, dt11, x1, y1, x2, y2, r As SingleDim x3, y3, x4, y4, rg '定义各种量h = Form2.Text3e = Form2.Text2k1 = Form2.Text4s0 = Form2.Text1rg = Form2.Text5 '试各种变量与文本框相等,用于输入数据Const pi = 3.1415926n = 1000 '把每一步定义为360°/1000dt11 = 0dt1 = pi / 3dt2 = pi / 3dt3 = pi / 2 / ndt4 = 0dt6 = pi / 18Form2.Picture3.Line (-70, 0)-(70, 0)Form2.Picture3.Line (0, 70)-(0, -70)Form2.Picture1.Line (0, 0)-(7, 0)Form2.Picture1.Line (0, 6.5)-(0, 0)Form2.Picture2.Line (0, 0)-(7, 0)Form2.Picture2.Line (0, 390)-(0, -390) '画出各个两个图框的坐标轴s1 = h * ((dt4 / dt1) - Sin(2 * pi * dt4 / dt1) / (2 * pi))v1 = h * k1 * (1 - Cos(2 * pi * dt4 / dt1)) / dt1 '计算第一个点的速度和推程,选择正弦加速度规律x1 = (s0 + s1) * Sin(dt4) + e * Cos(dt4)y1 = (s0 + s1) * Cos(dt4) - e * Sin(dt4) '计算凸轮理论轮廓第一个点的坐标x3 = (s0 + s1 - rg) * Sin(dt4) + e * Cos(dt4)y3 = (s0 + s1 - rg) * Cos(dt4) - e * Sin(dt4) '计算实际工作轮廓曲线的第一个点的坐标While dt4 < dt1 '第一个六十度的循环绘制推程的曲线dt5 = dt4 + dt3s2 = h * ((dt5 / dt1) - Sin(2 * pi * dt5 / dt1) / (2 * pi))v2 = h * k1 * (1 - Cos(2 * pi * dt5 / dt1)) / dt1x2 = (s0 + s2) * Sin(dt5) + e * Cos(dt5)y2 = (s0 + s2) * Cos(dt5) - e * Sin(dt5)x4 = (s0 + s2 - rg) * Sin(dt5) + e * Cos(dt5)y4 = (s0 + s2 - rg) * Cos(dt5) - e * Sin(dt5) '绘制上述参数的第二个点Form2.Picture1.Line (dt4, s1)-(dt5, s2)Form2.Picture2.Line (dt4, v1)-(dt5, v2)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '画直线,由于每一个步长很小,故可以一直代曲dt4 = dt5s1 = s2v1 = v2x1 = x2y1 = y2x3 = x4y3 = y4 '交换数值Wenddt11 = dt4While dt11 >= dt1 And dt11 < dt1 + dt6 '第二个10的远休角的的循环,绘制的理论和实际轮廓曲线都都是一段圆心角为十度的圆弧dt11 = dt11 + dt3x2 = (s0 + s2) * Sin(dt11) + e * Cos(dt11)y2 = (s0 + s2) * Cos(dt11) - e * Sin(dt11)x4 = (s0 + s2 - rg) * Sin(dt11) + e * Cos(dt11)y4 = (s0 + s2 - rg) * Cos(dt11) - e * Sin(dt11)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '循环画点形成一个曲线x1 = x2y1 = y2x3 = x4y3 = y4Wenddt4 = dt4 + dt6Form2.Picture1.Line (dt1, s1)-(dt4, s1)Form2.Picture2.Line (dt1, v1)-(dt4, v1) '绘制远休时的s曲线While dt4 >= dt1 + dt6 And dt4 < dt1 + dt6 + dt2 '第三个60°近休循环,绘制回程的曲线dt8 = dt4 - dt1 - dt6s2 = h * (1 - (dt8 / dt2) + Sin(2 * pi * dt8 / dt2) / (2 * pi))v2 = h * k1 * (Cos(2 * pi * dt8 / dt2) - 1) / dt2x2 = (s0 + s2) * Sin(dt4) + e * Cos(dt4)y2 = (s0 + s2) * Cos(dt4) - e * Sin(dt4)x4 = (s0 + s2 - rg) * Sin(dt4) + e * Cos(dt4)y4 = (s0 + s2 - rg) * Cos(dt4) - e * Sin(dt4)dt5 = dt4 + dt3Form2.Picture1.Line (dt4, s1)-(dt5, s2)Form2.Picture2.Line (dt4, v1)-(dt5, v2)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '坐标点连线dt4 = dt5x1 = x2y1 = y2x3 = x4y3 = y4s1 = s2v1 = v2 '数据交换Wenddt9 = dt4While dt9 >= dt1 + dt6 + dt2 And dt9 <= 2 * pi '第四个230°的近休循环dt9 = dt9 + dt3x2 = (s0 + s2) * Sin(dt9) + e * Cos(dt9)y2 = (s0 + s2) * Cos(dt9) - e * Sin(dt9)x4 = (s0 + s2 - rg) * Sin(dt9) + e * Cos(dt9)y4 = (s0 + s2 - rg) * Cos(dt9) - e * Sin(dt9)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4)x1 = x2y1 = y2x3 = x4y3 = y4WendForm2.Picture1.Line (dt1 + dt6 + dt2, s1)-(2 * pi, s1)Form2.Picture2.Line (dt1 + dt6 + dt2, v1)-(2 * pi, v1) '绘制近休是的s曲线End SubPrivate Sub Command2_Click()Form2.Picture1.ClsForm2.Picture2.ClsForm2.Picture3.ClsForm2.Text1 = ""Form2.Text2 = ""Form2.Text3 = ""Form2.Text4 = ""Form2.Text5 = "" '曲线清空End Sub。
凸轮轮廓曲线设计
已知: 凸轮逆时针转动,
求 : 凸轮的基圆半径, 转动 90之后的压力角
• 解:
理论轮 廓
基圆 基圆
习题
25
第6章 凸轮机构
例题2
已知: 凸轮逆时针转动, 求 : 凸轮的基圆半径, 转 动90之后的压力角
• 解:
理论轮廓
基圆
基圆
习题
? 速度方向
26
6-4 图解法设计凸轮轮廓
已知从动件的运动规律[s =s(δ1)、v=v(δ1)、a=a(δ1)]及凸轮 机构的基本尺寸(如rmin、e)及转向,作出凸轮的轮廓曲线。
一、反转法原理
-w
s
-
B1
s
rb
B0
B
w
e
o
S
2
27
叉, 运动失真。
rT
min= rT ’= min-rT=0
rT
min < rT ’= min-rT<0
11
§6-3 图解法设计凸轮轮廓
结论: 内凹凸轮廓线: • 滚子半径无限制 外凸凸轮廓线: 运动失真原因:min<rT 避免方法
(1)减小滚子半径rT
(2)通过增大基圆半径rmin来加大理论轮廓曲线的min
件上力作用点的速度方向之间
所夹的锐角。
F'' F'tg
n F ' F cos F '' F sin
α ↑ 有害分力F" ↑有用分力 F' ↓
fF" ≥F'?
机构发生自锁现象,所以设计时要控制压力角不宜过大 17
§6-4 凸轮机构基本参数的确定