工业机器人快换装置的设计与调试学习资料
关于工业机器人的设置与校准方案

关于工业机器人的设置与校准方案1. 简介本文档旨在提供工业机器人的设置与校准方案。
工业机器人的设置和校准是确保机器人能够准确执行任务并保持高效运行的关键步骤。
2. 设置方案工业机器人的设置包括以下几个重要步骤:2.1. 安装机器人在安装机器人之前,需要确保机器人所需的工作区域满足安全要求,并且机器人与其他设备或人员之间有足够的空间。
安装过程应由经验丰富的技术人员进行,并按照制造商的指南进行操作。
2.2. 连接控制系统机器人的控制系统是机器人正常运行的关键。
确保控制系统与机器人的各个组件正确连接,包括传感器、执行器和电源等。
在连接过程中,应仔细检查每个连接点,确保连接牢固可靠。
2.3. 配置工作参数根据具体的任务需求,配置机器人的工作参数。
这些参数包括机器人的速度、力量、工作范围和姿态等。
根据任务的性质,调整参数以确保机器人能够高效地完成工作。
3. 校准方案工业机器人的校准是为了保证机器人在执行任务时的准确性和精度。
下面是一些常见的校准方案:3.1. 坐标系校准机器人的坐标系校准是确保机器人能够准确执行运动轨迹的关键。
通过使用专业的校准工具,校准机器人的坐标系,以确保机器人的运动和位置与预期一致。
3.2. 传感器校准机器人的传感器在执行任务时起到关键作用。
对于涉及传感器的任务,如视觉引导或力传感器控制等,需要对传感器进行校准,以确保传感器输出的数据准确可靠。
3.3. 动态校准动态校准是在机器人运行过程中对其进行校准,以保持其执行任务的准确性。
通过监测机器人的运动和姿态,并根据反馈信息进行微调,可以实现动态校准。
4. 结论通过正确设置和校准工业机器人,可以确保机器人能够高效地执行任务,并保持准确性和精度。
在进行设置和校准时,应严格按照制造商的指南进行操作,并由经验丰富的技术人员进行操作。
工业用机器人的配置及调试方法

工业用机器人的配置及调试方法1. 引言工业用机器人在现代制造业中扮演着重要的角色。
为了确保机器人能够正常运行并达到预期的性能,正确的配置和调试方法是至关重要的。
本文将介绍工业用机器人的配置和调试方法,帮助您顺利完成机器人的部署和调试工作。
2. 配置方法2.1 硬件配置工业用机器人的硬件配置包括选择适当的机器人型号、安装工作站、连接传感器和执行器等。
在进行硬件配置时,应考虑以下几个方面:- 机器人型号:根据实际需求选择适当的机器人型号,包括机械臂的长度、负载能力等参数。
- 工作站安装:将工作站安装在合适的位置,确保机器人可以自由移动而不受限制。
- 传感器和执行器连接:根据需要连接传感器和执行器,如视觉传感器、力传感器等,以提供更精确的控制和反馈。
2.2 软件配置工业用机器人的软件配置包括安装和设置机器人控制系统、编写机器人控制程序等。
在进行软件配置时,应注意以下几点:- 机器人控制系统安装:根据机器人型号和厂商提供的指南,正确安装机器人控制系统,并进行初始化设置。
- 控制程序编写:根据实际需求编写机器人的控制程序,包括轨迹规划、碰撞检测等功能,以实现所需的工作任务。
3. 调试方法3.1 硬件调试在完成机器人的配置后,需要进行硬件调试以确保机器人能够正常工作。
硬件调试的主要步骤包括:- 运动测试:通过控制机器人执行简单的运动任务,如抓取物体、移动到指定位置等,检查机器人的运动是否正常。
- 传感器测试:测试连接的传感器是否能够正常工作,并获取准确的反馈数据。
- 执行器测试:测试执行器的性能和准确性,如执行器的速度、负载能力等。
3.2 软件调试软件调试是确保机器人控制程序正确运行的关键步骤。
以下是软件调试的一些常见方法:- 轨迹规划调试:检查机器人的轨迹规划算法是否正确,并进行必要的调整以实现精确的运动控制。
- 碰撞检测调试:测试机器人的碰撞检测功能,确保机器人在遇到障碍物时能够正确停止或避开。
- 控制程序逻辑调试:通过对控制程序的逻辑进行测试和调试,确保机器人能够按照预期执行各项任务。
工业机器人编程与调试(ABB)教学课件1

程序结构与设计方法
程序结构
包括主程序、子程序和中 断程序等,通过调用关系 实现程序的模块化设计。
设计方法
采用自顶向下的设计方法 ,先设计主程序流程,再 逐步细化各个功能模块。
编程规范
遵循良好的编程规范,如 命名规范、注释规范等, 提高程序的可读性和可维 护性。
编程实例演示
实例介绍
通过一个简单的搬运任务实例,演示如何使用 RAPID语言进行编程。
参数设置
了解机器人系统中的重要参数,如速度、加速度、负载等,并根 据实际需求进行设置。
参数优化
通过调整参数,优化机器人的运动性能和精度,提高生产效率。
备份与恢复参数
学会备份和恢复机器人系统参数,以便在出现问题时快速恢复到之 前的状态。
故障诊断与排除方法
01
02
03
04
常见故障类型
了解机器人常见的故障类型, 如电气故障、机械故障、通信
工业机器人编程与调 试(ABB)教学课件1
目录
• 课程介绍与基础知识 • 工业机器人基本原理与结构 • ABB机器人编程基础 • ABB机器人调试技术 • 高级编程技巧与应用实例 • 实验操作与项目实践
01
课程介绍与基础知识
工业机器人概述
定义与分类
工业机器人是一种自动化设备,能够
工业机器人系统组成
硬件环境
工业机器人、控制器、示教器、电脑等。
软件环境
ABB机器人编程软件RobotStudio。
实验环境搭建及注意事项
安全第一
在操作机器人前,必须熟悉安全操作规程,佩戴好安全防 护用品。
熟悉设备
在操作前,应熟悉各设备的功能和使用方法。
备份数据
在实验过程中,及时备份数据和程序,以防意外丢失。
工业机器人快换装置的安装与调试
工业机器人快换装置的安装与调试作者:颜玮来源:《山东工业技术》2016年第19期摘要:工业机器人是目前广泛应用机器人设备。
不同的末端操作器增加工业机器人的工作柔性。
快换装置可快速更换不同的末端执行器,完成不同的作业任务。
快换装置的安装调试提高工程师对工业机器人集成化的了解,深入工业机器人的应用。
关键词:快换装置;安装调试;应用DOI:10.16640/ki.37-1222/t.2016.19.0071 工业机器人的应用工业机器人将人类从繁重单一的劳动中解放出来,能够从事一些不适合人类甚至超越人类的劳动,实现生产的自动化,避免工伤事故和提高生产效率。
常用于焊接、喷漆、上下料和搬运,延伸和扩大了人的手足和大脑功能,代替人从事危险、有害、有毒、低温和高温等恶劣环境中的工作。
目前工业机器人主要应用于制造业,特别是电器制造、汽车制造、塑料加工、金属加工以及金属制品业等。
随着生产的发展,机器人功能和性能不断改善和提高,机器人的应用领域日益扩大,其应用范围已不限于制造业,还用于农业、林业、交通运输业、原子能工业、医疗、福利事业、海洋和太空的开发事业中。
2 末端操作器工业机器人的手部也叫末端操作器,它是装在工业机器人手腕上直接抓握工件或执行作业的部件。
机器人的作业能力和作业效率依赖于机器人操作器作业能力大小,提高机器人操作器的作业能力和作业效率方法有:设计新型操作器,提高其适应能力、通用性和灵活程度;为机器人配置工具库,工具库中存放机器人作业需要的操作器,设计相关的操作器自动更换系统。
在操作器自动换接系统的支持下,根据工作需自动更换、使用工具库中各种操作器来完成各种作业任务。
3 操作器自动换接系统和工业机器人快换装置操作器的自动换接系统,能够将不同的末端操作器连接在工业机器人上,保证其工作的稳定性。
操作器的换接过程相当于机器人的装配作业,是个复杂的几何和力学过程。
根据工业机器人常用作业分析,目前工业机器人的末端操作器能进行的操作有抓取、焊接、打磨。
工业机器人快换装置的安装与调试

工业机器人快换装置的安装与调试摘要:工业机器人的诞生,标志着工业机械制造进入了新阶段,工业机器人的使用使工业制造生产效率得到极大的提高,同时也促使工业生产向自动化的轨迹迈进,为此在工业制造业迅速发展的今天,强化对工业机器人的安装及调试至关重要。
安装、调试快换装置,有助于工程师深入的了解工业机器人的集成化特征,也利于工业机器人应用范围的进一步扩大。
文章以工业机器人快换装置为侧重点,主要探讨其安装、调试,仅供参考,希望能为工业机器人在全社会范围内的推广提供一定助力。
关键词:工业机器人;快换装置;安装;调试在时代飞速进步、发展的背景下,人类生产力开始发生巨大的变动,其中机械开始逐渐取代人工,并在生产的各个方面得到广泛应用。
特别是得益于科技进步、发展而逐渐涌现的工业机器人,使得多方面的人力劳动逐渐被取代,且各方面的生产也开始逐渐趋于自动化发展,生产效率大大提升。
除此之外,与人工相比,工业机器人的优势众多,比如它具备极强的适用性和较高的重复精度,正是因为工业机器人具备以上优势,所以在电子及物流、化工等诸多领域发挥的作用越来越突出。
而为了使工业机器人在应用中的实际作用最大化发挥出来,不应忽视的就是快换装置安装、调试,以满足更多作业需求。
1工业机器人工业机器人是一种能够自动执行各种工业任务的多关节可编程装置,它在制造业领域广泛应用,以解放人类劳动力,从事一些不适合人类、甚至超越人类能力的劳动,从而实现自动化生产。
工业机器人的应用领域越来越广泛,其价值也在不断凸显,更展现出了良好的发展前景。
工业机器人的主要应用领域包括:第一,汽车制造业。
工业机器人在汽车制造中可以完成焊接、涂装、装配等一系列作业,提高生产效率和产品质量。
第二,电子制造业。
在电子生产过程中,工业机器人可以实现精细的组装、焊接和测试等任务,提高生产速度和一致性。
第三,食品和饮料生产。
机器人可以在食品加工过程中执行包装、搬运、分拣等工作,确保产品的卫生和一致性。
工业机器人编程和调试教程
工业机器人编程和调试教程工业机器人的出现和广泛应用大大提高了生产力和生产效率。
为了使工业机器人能够正常工作,工程师们需要进行编程和调试。
本文将向您介绍工业机器人编程和调试的基本步骤和技巧,帮助您顺利完成任务。
一、准备工作在开始工业机器人编程和调试之前,我们需要准备一些必要的工具和资料。
首先,您需要了解所使用的机器人品牌和型号,并下载和安装相应的机器人编程软件。
其次,确保您具备一定的机器人基础知识,包括机器人组成部分、机器人运动轨迹等。
最后,准备好机器人的用户手册、技术规格和相关文档,以便查询和参考。
二、编程环境搭建在进行工业机器人编程之前,我们需要为机器人搭建一个适合的编程环境。
首先,确保机器人连接到电源并开启,然后连接机器人与计算机的通信线缆。
接下来,配置机器人编程软件,设置机器人的IP地址和端口号,确保计算机能够与机器人进行通信。
最后,根据机器人的运动轨迹和任务需求,设置工作区域和安全区域,确保机器人的运动范围和安全性。
三、编程和调试步骤1. 程序编写在进行工业机器人编程之前,我们需要先制定一个程序。
根据机器人的任务需求,确定机器人的运动轨迹、路径规划和执行顺序。
使用机器人编程软件,编写程序并进行调试。
程序的编写包括定义变量、设置运动方向和速度、配置传感器和执行器等。
2. 轨迹规划轨迹规划是指确定机器人的运动轨迹和路径。
根据机器人的工作空间和任务需求,选择合适的运动轨迹规划算法。
常用的轨迹规划算法包括线性插值、圆弧插值和样条插值等。
通过调整机器人的关节角度和位置,使其按照预设的轨迹规划进行运动。
3. 运动控制运动控制是实现机器人运动的关键步骤。
通过控制机器人的关节角度和速度,实现机器人的准确运动。
编程软件提供了不同的运动控制功能,如位置控制、速度控制和力控制等。
根据机器人的任务需求和工作空间,选择合适的运动控制方法。
4. 程序调试编程和调试是工业机器人开发过程中的重要环节。
在进行程序调试之前,我们需要先对程序进行模拟和验证。
快换项目电气调试大纲

一、概述1、快换机器人电气系统简介:快换机器人电气控制系统主要由主升降变频调速控制系统、水平变频调速控制系统、旋转伺服调速控制系统、侧倾伺服调速控制系统、伸叉伺服调速控制系统、解锁伺服调速控制系统、单目CCD相机视觉识别系统、触摸屏控制系统等八部分组成。
变频调速系统采用台达公司C2000系列产品,伺服系统采用台达公司A2系列产品。
可编程序控制器采用日本欧姆龙CJ2系列产品,触摸屏采用昆仑通态TPC1262H系列产品。
通过本公司软件开发以及各种控制参数的设定,实现整个系统的精确定位控制。
2、本手册使用指南:本手册全面系统的介绍了门机进行电气调试的整个环节及每个调试环节需注意的事项。
请在调试前仔细阅读本手册,调试过程中严格按照大纲所列的调试项目进行。
二、现场调试注意事项设备上电之前一定要仔细检查线路确保接线正确,电气柜内所有的施工工具及其它一切杂物都应清除;为确保人员和设备的安全设备上电调试之前控制柜的接地系统应先做好;自第一次上电调试以后即被视为带电设备,任何时候在电气设备上进行施工作业都必须先确认电源已断开;调试时受施工现场的限制很多时候安全保护设备(如限位)都没有安装,因此在操作时应精力集中听从负责人的指挥;每天调试完离开现场前必须断开总电源。
三、调试前的准备1、需准备的工具:安装有CX-Programmer和MCGS软件的笔记本电脑、欧姆龙编程电缆、MCGS 调试电缆、万用表、电气原理图、变频器调试手册、伺服调试手册、常用的电工工具。
2、现场需做的准备:对所调试设备周边的杂物进行清除;机械部分提前做好运行准备工作;柜间连线及电气柜到设备的线路检查;用兆欧表对电机、电缆的绝缘进行测量;四、电控系统调试1、配电系统(1)检查所有线路是否存在短路、虚连、开路现象;(2)确认电气柜内的所有开关都是断开位置;(3)配电控制系统逐级上电量测电压;(4)电气柜内照明、风扇运行检查;(5)逐一打开回路空气开关,并测量该回路元件电压;2、PLC系统(1)检查PLC线路是否正确,是否有报警产生,如有报警,则根据报警代码或线路查找原因;(2)监视PLC程序看每个开关信号的触点输入在PLC内是否正确;(3)检查PLC与各通信设备的通信是否正常。
工业用机器人的配置及调试方法
工业用机器人的配置及调试方法简介本文档旨在介绍工业用机器人的配置和调试方法。
工业用机器人是自动化生产线中的重要组成部分,能够完成各种复杂的生产任务。
正确配置和调试机器人是确保其正常运行和高效工作的关键。
机器人配置1. 选择适当的机器人类型:根据生产需求和任务要求,选择适合的机器人类型,如SCARA、Delta、直线型等。
确保机器人的负载能力、速度和精度符合需求。
选择适当的机器人类型:根据生产需求和任务要求,选择适合的机器人类型,如SCARA、Delta、直线型等。
确保机器人的负载能力、速度和精度符合需求。
2. 确定机器人工作空间:根据生产线的布局和工艺要求,确定机器人的工作空间范围。
考虑到机器人的动作半径和安全距离,确保机器人能够自由移动和操作。
确定机器人工作空间:根据生产线的布局和工艺要求,确定机器人的工作空间范围。
考虑到机器人的动作半径和安全距离,确保机器人能够自由移动和操作。
3. 配置机器人末端工具:根据具体任务,选择适当的末端工具,如夹爪、吸盘等。
确保末端工具能够稳定可靠地完成操作,并具备适当的控制和感应功能。
配置机器人末端工具:根据具体任务,选择适当的末端工具,如夹爪、吸盘等。
确保末端工具能够稳定可靠地完成操作,并具备适当的控制和感应功能。
4. 选择合适的传感器和视觉系统:根据任务要求,选择适当的传感器和视觉系统,如力传感器、视觉传感器等。
配置传感器和视觉系统可以增强机器人的感知和控制能力,提高工作效率和安全性。
选择合适的传感器和视觉系统:根据任务要求,选择适当的传感器和视觉系统,如力传感器、视觉传感器等。
配置传感器和视觉系统可以增强机器人的感知和控制能力,提高工作效率和安全性。
机器人调试1. 检查机器人硬件连接:确保机器人的各个组件正确连接,并且电源供应正常。
检查电缆、插头和接口,确保信号传输正常。
检查机器人硬件连接:确保机器人的各个组件正确连接,并且电源供应正常。
检查电缆、插头和接口,确保信号传输正常。
工业机器人执行器快速切换连接盘设计与研发
工业机器人执行器快速切换连接盘设计与研发摘要:在工业机器人使用过程中,能否合理配备快速切换装置将直接影响机器人性能发挥。
设计快速切换连接盘辅助机器人更换末端执行器,确保单个机器人能够用于自动点焊、冲压等各种工序,可以有效提高机器人性价比。
在把握产品设计需求和主要技术指标的基础上,从主要结构、超强锁紧、自锁防脱落结构等方面对连接盘关键研发技术展开研究,并通过性能检测和试验实现产品改进,最终研发出了理想的工业机器人快速切换装置,可为同类产品设计提供参考。
关键词:工业机器人;快速切换连接盘;大口径气缸;防脱落自锁;航空铝合金外壳引言所谓的机器人工具快速切换装置,实际是使用在末端执行器上的柔性连接工具,又被称之为工具快换盘、换枪盘、快换工具盘、快换器等,为高性能工业机器人上的重要组成部分[1]。
配备快速切换装置,可以使机器人通过交换使用末端执行器实现柔性生产,开展材料抓取、冲压、检测、卷边、装配等多种作业,提高换线效率和减少停工时间,为企业创造更多效益。
现阶段有关机器人执行器快速切换连接盘的研究依然较少,因此对相关技术展开研究,有助于提升工业机器人设计水平。
1 研发背景在工业自动化进程不断加快的背景下,越来越多的产线开始引进工业机器人实现自动化生产,有效提高产线生产效率和减少人力成本。
但采取一机一用的空间布局方式,导致单个机器人可以完成的作业工序较少,设备利用率低,产线运营成本过高,因此企业大多选择使用多功能工业机器人承包多道工序。
而多功能工业机器人大多为进口设备,具有价格高、供货周期长、售后服务慢等缺陷。
针对这一局面,研制工业机器人执行器快速切换连接盘,配合国产工业机器人使用可实现一机多用,在节省空间的同时降低设备成本,为工业企业转型升级发展提供有力技术支撑。
2 设计需求及产品概述2.1功能需求在产品设计上,研发工业机器人执行器快速切换连接盘,主要用于满足汽车制作车间不同焊装产线的机器人使用需求,需要完成各种焊钳、焊钳和定位抓手间的快速更换,确保机器人能够完成不同工序焊接、抓取等作业。
《工业机器人安装与调试技术》教学课件 04 项目4 部件调试

任务3 调试锁螺丝机
▶任务实施
锁螺丝机的使用方法 1. 调整好适合的参数 调节方法如下: (2)速度调整。 ① 振动马达速度特性调整。 ② 上料转轮延时调整:当螺钉较大或螺钉外形不利 进入导轨槽时,将转轮延时调长,反之螺钉较小时调短 。 ③ 导轨振动延时调整:同样,螺钉较大或外形不利 进入导轨槽时,将振动延时调长,反之,螺钉较小时调 短。
任务2 安装与检测光栅
▶知识储备
二、安全光栅的工作原理与诊断 安全光栅通过发光器发射光信号,接收器直接接收光信号,形成保护光幕, 受光器监控光幕的通断状态,并把光幕的通断信号通过内部电路处理,直接输出 低电平(通光时)或高电平(挡光时),通过传输线连到PLC或者报警器报警电路,从 而实现设备停止或者发出安全报警。
任务1 设置伺服驱动器参数
▶任务实施
二、 设置位置控制增益
任务1 设置伺服驱动器参数
▶任务实施
三、 设置速度控制增益 本任务以设置速度控制增益为680为例,具体操作过程见表4-2。
任务1 设置伺服驱动器参数
▶任务实施
三、 设置速度控制增益 本任务以设置速度控制增益为680为例,具体操作过程见表4-2。
任务3 调试锁螺丝机
▶任务实施
锁螺丝机的使用方法 1. 调整好适合的参数 为了使取螺钉更轻松,还需注意以下几点: ① 转盘必须与导轨对中,压板必须将螺钉帽压住。 ② 建议旋转着取螺钉,这样将会更省力。 ③ 运动部件每隔两个月应当加注润滑油,以使运转正常。 ④ 当出现卡螺丝、报警器异常报警、产生难闻的气味等异常情况时,应立即停止使用,关 闭电源,检查调整。如果自己不能解决的故障,应联系经销商维修。
本任务讲解安全光栅的工作原理以及故障诊断方法。 通过本任务的学习,学生可以了解安全光栅的基本工作原理并 掌握安全光栅的常见故障及诊断方法。
一种工业机器人快换装置辅助调试工具的设计与应用

机械与动力工程河南科技Henan Science and Technology总第872期第1期2024年1月收稿日期:2023-08-08基金项目:吉林省教育科学规划课题2023年度立项课题(GH22260);吉林省职业院校创新创业教育教学指导委员会2022年度立项课题(CXCYHZW2022040)。
作者简介:刘广涛(1999—),男,本科,技师/中级,研究方向:工业机器人技术与虚拟仿真技术;周显强(1999—),男,本科,高级工/助教,研究方向:机械设计及机械加工;韩昊宏(1996—),女,硕士,高级工/助教,研究方向:工业机器人技术、控制理论与控制工程;王昀(1985—),女,博士,副研究员/副教授,研究方向:电子信息科学、交叉学科人才培养。
一种工业机器人快换装置辅助调试工具的设计与应用刘广涛 周显强 韩昊宏 王 昀(长春汽车工业高等专科学校,吉林 长春 130013)摘 要:【目的】针对工业机器人快换装置调试工艺流程中的复杂性问题,设计一种辅助调试工具,提高调试的工作效率。
【方法】通过调研统计,对快换装置辅助调试工具功能进行需求分析,采用弹簧缓冲原理进行产品设计。
【结果】设计了一种快换装置辅助调试工具,包括定位凹槽、定位凸槽、定位销、定位销控、弹性伸缩连杆等。
【结论】提高工业机器人快换装置调试效率,解决因操作不当造成的快换装置碰撞等问题。
关键词:工业机器人;快换装置;辅助调试工具中图分类号:TP242.2 文献标志码:A 文章编号:1003-5168(2024)01-0025-04DOI :10.19968/ki.hnkj.1003-5168.2024.01.005Design and Application of an Auxiliary Debugging Tool for IndustrialRobot Quick Change DeviceLIU Guangtao ZHOU Xianqiang HAN Haohong WANG Yun(Changchun Automobile Industry College, Changchun 130013,China)Abstract: [Purposes ] Aiming at the complexity of the debugging process of industrial robot quick changedevice, an auxiliary debugging tool is designed to improve the debugging efficiency.[Methods ] Through investigation and statistics, the function of the quick change device is analyzed, and the spring buffer principle is adopted for product design.[Findings ] An auxiliary debugging tool of quick changing device is designed, including positioning groove, positioning convex groove, positioning pin, positioning pin con⁃trol, and elastic expansion connecting rod.[Conclusions ] It is recommended to improve Improve the de⁃bugging efficiency of the quick change device of industrial robots, and solve the problems such as the col⁃lision of the quick change device caused by improper operation.Keywords: industrial robot; quick changing device; auxiliary debugging tool0 引言机器人工具快换装置也被称为自动工具转换装置(Auto Tool Change,ATC )。
《工业机器人机电装调与维修一体化教程》模块一认识工业机器人的编程

VS
基于图形的编程语言
这类语言使用图形符号和箭头等直观的方 式来描述机器人的路径和动作。例如, PTP(Point-to-Point)和MoveIt等。
编程软件介绍
要点一
ROS(Robot Operating System)
是一个开源的机器人操作系统,提供了一套框架来简化 机器人的开发和编程。ROS包含了多种工具,如ROS节 点、TF(Transform)库、可视化工具等,可实现机器 人感知、导航、操控等功能。
机器人编程模式
示教模式
通过手动操作机器人,记录机器人的运动轨迹,然后将其转 换成程序代码
编程模式
通过编写程序代码来控制机器人的运动和行为,适用于复杂 的任务和精确的运动轨迹控制
03
工业机器人编程技巧
运动轨迹规划
01
02
03
直线运动轨迹
利用机器人末端执行器沿 着直线轨迹移动,实现简 单搬运、装配等操作。
调试技巧
注意插补算法的参数设置,确保轨 迹的平滑和准确。同时,考虑机器 人的运动性能限制,避免产生过快 或过急的运动轨迹。
05
工业机器人编程安全
操作安全
操作前检查
在操作工业机器人编程前,需 要仔细检查机器人的状态,包 括电源、急停按钮是否处于正 确状态,以及周围环境是否安
Байду номын сангаас全等。
遵循编程规则
在编程过程中,需要遵循机器 人编程的规则和指令,避免因
错误操作导致意外发生。
调试程序
在程序调试过程中,需要先在 安全的环境下进行测试,确认 程序无误后再运行实际操作。
维护安全
定期维护
工业机器人需要定期进行维护 保养,包括更换滤清器、检查 电路等,以保障机器人的安全
《工业机器人机电装调与维修一体化教程》模块二一般搬运类工作站的现场编程

《工业机器人机电装调与维修一体化教程》模块二一般搬运类工作站的现场编程CATALOGUE目录•课程导入与学习目标•工业机器人基础知识•一般搬运类工作站基础知识•现场编程与调试•工业机器人维护与保养01课程导入与学习目标课程导入02工业机器人技术的发展历程和现状03工业机器人对产业工人技能的要求学习目标掌握工业机器人操作的基本技能了解工业机器人维护和保养的基本知识理解工业机器人编程的基本原理和方法能够进行一般搬运类工作站的现场编程和调试02工业机器人基础知识工业机器人是一种由人类编程和控制的,能够在各种环境和条件下执行可重复性任务的自动化机器。
工业机器人的定义工业机器人具有高效率、高精度、高可靠性、低成本、可编程性等优点,是现代制造业中不可或缺的重要装备。
工业机器人的特点工业机器人的定义与特点1工业机器人的发展历程23机械式机器人,主要通过机械系统和简单控制系统实现一些简单的动作。
第一代工业机器人数控机床机器人,具有更高的精度和更强的控制能力。
第二代工业机器人智能机器人,具有感知、认知、学习和自主行动能力,能够适应环境变化并完成任务。
第三代工业机器人工业机器人的基本组成机械系统、控制系统、传感器系统和人机交互系统等。
工业机器人的工作原理通过控制系统对机械系统进行控制,实现机器人的运动和操作,传感器系统感知环境和操作对象,人机交互系统实现人与机器人之间的交互。
工业机器人的基本组成与工作原理03一般搬运类工作站基础知识0102定义:一般搬运类工作站是一种使用工业机器人进行物料搬运的自动化生产装置,通常由机器人、夹具、控制器、传感器等组成。
特点高效性:使用工业机器人进行物料搬运可以大幅提高生产效率。
灵活性:通过更换夹具和机器人程序调整,可以适应不同的物料形状、大小和搬运距离。
安全性:使用传感器和安全防护装置可以确保操作的安全性。
一般搬运类工作站的定义与特点030405组成一般搬运类工作站主要由机器人本体、控制器、传感器、夹具等组成。
工业机器人装调教程(ABB)项目2 工业机器人基础知识与操作

六关节臂机 垂直多关节机器人由多个旋转和摆动
关节组成,其结构紧凑,工作空间大,工 作接近人类,工作时能绕过机座周围的一 些障碍物,对装配、喷涂、焊接等多种作 业都有良好的适应性,且适合电动机驱动, 关节密封、防尘比较容易。
水平多关节机器人: 水平多关节机器人也称为SCARA机器人,如图所示。
5
工业机器人发展过程
智能机器人阶段: 1985年至今。智能机器人带有多种传感器,可以将传感器得到的信息进行融合, 有效地适应变化的环境,因而具有很强的自适应能力、学习能力和自治功能。在 2000年以后,美国、日本等国都开始了智能军用机器人研究,并在2002年由美国 波士顿公司和日本公司共同申请了第一件“机械狗”(Boston Dynamics Big D o g ) 智 能 军 用 机 器 人 专 利 , 2 0 0 4 年 在 美 国 政 府 D A R PA / S PAWA R 计 划 支 持 下 申 请了智能军用机器人专利。
ABB双臂机器人YuMi
8
工业机器人应用分类
2.机器人的分类: 机器人的结构形式多种多样,
典型机器人的运动特征用其坐标特 性来描述。按结构特征来分,工业 机器人通常可以分为直角坐标机器 人、柱面坐标机器人、球面坐标机 器人、多关节机器人和并联机器人。
直角坐标机器人
六关节臂机器人
水平多关节机器人
并联机器人
水平多关节机器人一般具有四个轴和四个自由度,它的 第一、二、四轴具有转动特性,第三轴具有线性移动特 性,并且第三轴和第四轴可以根据工作需要的不同,制 造出多种不同的形态。水平多关节机器人的特点在于作 业空间与占地面积比很大,使用起来方便;在垂直升降 方面刚性好,尤其适合平面装配作业。目前主要应用在 电子产品行业、汽车工业、塑料工业等领域,用以完成 装配、搬取、喷涂和焊接等操作。
机器人快换接头毕业设计资料
毕 业 设 计题 目 名 称: 机器人快换接头的设计学生姓名: 学号:二级院校(系)/专业: 机械工程学院/机电一体化班 级:指 导 教 师:2015.12.01——2016.06.02南京工业职业技术学院毕业设计摘要机器人在工业生产中,越来越普遍的需要更换各种各样的末端执行器。
如抓手、真空工具、焊枪、电动和气动马达等末端执行器的更换,如果用人工的话会增加机器人的停工时间,降低机器人的工作效率。
本课题的研究对象是快换接头。
先从机器人快换接头的特点,引出国内外快换接头的发展状况。
通过对机器人快换接头的简介与分类,引出本课题的主要内容:机器人手动快换接头的设计。
机器人快换接头是用来快速、高效的更换机器人手臂末端执行器的装置,能在数秒内完成末端执行器的更换,从而大大提高了机器人的工作效率。
而本课题对手动快换接头本体的机械部分研究的关键在于锁紧装置和气路流通端口。
锁紧装置设计的好坏决定了快换接头锁紧能力的高低,而气路的气密性决定气源补给的质量。
本设计除了介绍机器人快换接头的分类及现状,锁紧装置的设计和气路流通端口的研究外,也介绍了机器人自动快换接头,进而与手动快换接头做了一些比较。
关键词:机器人快换接头锁紧装置气路流通端口I机器人快换接头的设计II AbstractRobots in the industrial production, more and more common need to replace a variety of end executor. Such as gripper, vacuum tools, welding torch, electric and pneumatic motor actuator at the end of the replacement, if using artificial increases the shutdown time of robot, reduce the working efficiency of the robot.This topic research object is quick change connectors. First from the characteristics of quick change robot joint, which leads to the fast at home and abroad for joint development. Through the description and classification of quick change robot joint, lead to the main content of this topic: the design of the robot manually quick change connectors. Robot, quick change connector is used for rapid, efficient replacement actuators at the end of the robot arm device, can end in a few seconds to complete actuators change, thus greatly improve the work efficiency of the robot. Ontology and this topic opponent to move faster in joint locking device is the key of the mechanical part of the study of the gas port road circulation. The stand or fall of locking device design determines the level of the ability of quick change joint locking, and pneumatic air tightness determines the quality of air supply. This design in addition to the introduction to the classification of the quick change connectors and the present situation, the design of the locking device and port road circulation research, also introduces the robot automatic quick change connectors, and then compared with the manual did some quick change joint.Keywords: Robot quick change connectors Locking device Pneumatic circulation ports南京工业职业技术学院毕业设计目录第一章绪论 (1)1.1 选题背景 (1)1.2 机器人快换接头简述 (1)1.3 发展前景 (2)1.4 意义 (2)第二章机器人快换接头特点和国内外状态 (3)2.1机器人快换接头的定义 (3)2.2机器人快换接头的特点 (3)2.3 机器人快换接头国内外发展情况 (3)2.3.1国内状况 (3)2.3.2国外状况 (4)2.3.3企业快换接头举例 (4)第三章机器人快换接头简介 (6)3.1机器人快换接头分类 (6)3.1.1机器人自动快换接头 (6)3.1.2机器人手动快换接头 (7)3.2 机器人快换接头应具有的特性 (7)第四章手动快换接头的设计 (9)4.1设计内容 (9)4.2材料及参数的选择与设定 (9)4.3整体装配 (11)4.3.1具体操作 (12)4.3.2装配注意事项 (13)4.4主端口盘盖的设计 (13)4.5定位销的选择 (15)4.6锁紧装置的设计 (16)4.6.1中间销的设计 (16)4.6.2锁紧装置手柄的设计 (18)4.6.3锁紧销的设计 (19)III机器人快换接头的设计IV4.6.4固定销的选择 (20)4.7工具端口的设计 (21)4.7.1工具端口外轮廓的设计 (21)4.7.2工具端口气源补给孔的设计 (22)第五章自动快换接头的介绍 (23)5.1主端口的介绍 (23)5.2工具端口的介绍 (23)结论 (25)谢辞 (26)参考文献 (27)附录 (28)南京工业职业技术学院毕业设计第一章绪论1.1 选题背景随着科技的进步,工业生产正逐步走向一体化和智能化。
工业机器人快换装置的安装与调试夏祖峰
工业机器人快换装置的安装与调试夏祖峰发布时间:2021-08-31T07:09:42.469Z 来源:《河南电力》2021年5期作者:夏祖峰[导读] 自动机的快速换刀机制使自动机能够自动更换不同的终端驱动程序,使自动机的应用更加灵活。
(佛山市顺德区亿盛达精密机械制造有限公司广东佛山 528324)摘要:随着时代的发展。
人类生产力转变的开始。
劳动力逐渐被机器取代,并开始广泛用于旱地生产的各个方面。
特别是,工业机器人的出现在许多方面取代了手工劳动,导致生产自动化和生产效率的显着提高。
此外,工业机器人具有许多人工无法实现的优点,例如重复性高、精度高,使其在电子、物流、化工和航空航天等许多领域变得越来越重要。
随着中国经济的快速发展,工业机器人的使用可以节省人力资源,提高企业生产力,这对相关产业的改造和现代化以及提高设备制造能力十分重要。
关键词:工业机器人;快速切换;安装调试;应用分析前言自动机的快速换刀机制使自动机能够自动更换不同的终端驱动程序,使自动机的应用更加灵活。
该装置广泛应用于自动点焊、电弧焊、输入法、冲压、检验、卷边、装配、脱壳、毛刺、包装等操作。
它有许多优点,例如快速更换生产线和有效缩短停机时间。
一、工业机器人概述1.现代工业机器人的特点工业机器人是机电自动化的组合,其主要特点是:可重复编程。
在工业领域,机器人是灵活的制造系统,通过计算机编写和输入工作指令,按照代码执行顺序运行。
机器人可以适应不同产品的改造,批量生产有不同的特点,满足批量加工生产的要求的企业多种多样。
类结构。
机器人之所以被称为人类,是因为其结构与人类相似,主要由躯干、手臂、爪子等组成来模拟人们的动作。
一些机器人具有人体形态,可以与人交流,下棋,代替部分人类劳动等可互换性。
这是对不同工作站的操作,自动机可以通过简单地更改刀具或脚来完成对不同加工对象和加工位置的操作,也就是说,自动机具有高度的适应性和通用性。
2.工业机器人的组成结构在工业中,机器人通常由四个部分组成:主要部分、可编程部分、电机驱动和刀具转换器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人快换装置的设计与调试南京信息职业技术学院毕业设计论文作者胡晓东学号 21414D11 系部机电学院专业机电一体化技术题目工业机器人快换装置的设计与调试指导教师颜玮评阅教师颜玮完成时间: 2017年 4 月 1日目录1 引言 (1)2 工业机器人的发展现状 (1)2.1 我国工业机器人的发展现状 (1)2.2 国外工业机器人的发展现状 (1)3 工业机器人快换装置的工作原理及其基本组成 (2)4 工业机器人快换装置的电路气路整体结构 (3)5 工业机器人的运行程序 (5)5.1 运行环境 (5)5.2 动作流程 (6)5.3 指令 (6)5.4 程序编辑与调试 (7)6 快换装置的应用 (10)6.1 轴孔装配机器人工作站运行程序 (10)6.2 奖牌包装机器人工作站运行程序 (11)结论 (14)致谢 (14)参考文献 (14)1 引言自从美国研制出第一台可以使用的示教型工业机器人以来,国际上对工业机器人的开发和应用已经有50年的历程。
工业机器人是一种具有自动控制功能的机器,通过对其运行程序的编辑,工业机器人能够完成各种作业,末端执行器则是一种直接执行作业任务的装置。
通常末端执行器是为特定的用途而专门设计的。
如今已开发出喷漆、装配、焊接、搬运、注塑、码垛等工业机器人。
学校Estun工业机器人学院中的工业机器人需要夹持器安装末端执行器,如果能够设计相关的快换装置,则可为工业机器人多种作业提供较好的展示平台。
2 工业机器人的发展现状2.1 我国工业机器人的发展现状我国在“七.五”科技攻关计划中开始尝试发展工业机器人技术,由于当时经济实力的制约,发展缓慢,研究和应用水平也比较低。
为了实现高技术发展与我国经济建设相连接,863计划国家对机器人技术的发展做出了重要战略调整,明确把特种机器人与工业机器人及其应用工程并重,通过工业机器人的应用带动关键技术和基础研究的发展。
从机器人的销售量上来看,国内机器人市场增长非常迅速。
我国的智能机器人发展也取得了不少成果:相继开发出了点焊机器人、摘果机器人、下棋机器人、伐根机器人等机种;在基础技术的开发应用上有了很大的突破。
通过科技攻关,目前已基本掌握了机器人操作机的设计制造技术,但是在多传感器信息融合控制技术、机器人化机械等关键技术领域的开发应用方面才刚刚起步,需要在原有的基础上攻坚克难,才能形成与系统配套可供实用的技术和产品。
如今工业机器人在社会生活的各个方面的应用范围越来越广,如迎宾业务推广、前台问询机器人、营业大厅的机器人导购宣传员、画像机器人、跳舞机器人等,因此对机器人的需求也越来越大。
所以要加快攻克工业机器人的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进机器人产业快速化发展。
2.2 国外工业机器人的发展现状工业机器人是现代制造业重要的自动化装备,它囊括了电子、计算机、机械、传感器、人工智能等先进技术。
目前,国际上具有影响力的,著名的工业机器人供应商有安川、松下、American Robot、KUKA、CLOOS、瑞典ABB等公司。
美国是世界上机器人强国之一,基础雄厚,技术先进。
上世纪80年代美国制定和采取了相应的政策和措施,一方面鼓励工业界发展和应用机器人,另一方面制定计划、提高投资,增加研究经费,把机器人看成美国再次工业化的特征,使美国的机器人迅速发展。
随着各大厂家应用机器人的技术成熟,很快占领了机器人市场。
德国,不得不提它的支柱产业汽车,德国作为工业强国,工业自动化水平都久负盛誉,强大的工业实力为其工业机器人的发展夯实了基础。
库卡公司是德国最为知名的工业机器人生产商,是全球顶级工业机器人制造商之一。
其产品主要应用于汽车、物流、食品、医药、铸造等方面。
近几年德国的工业机器人在人机交互、机器视觉、机器互联、服务机器人等方面发展迅速。
近些年国外机器人领域发展趋势:工业机器人的性能不断提高主要表现在三个方面即高速度、高精度、高可靠性;机械结构向模块化、可重构化发展;工业机器人控制系统从单一系统开始向基于PC机的控制器方向发展;机器人语言研究发展较快,语言类型多,应用广。
3 工业机器人快换装置的工作原理及其基本组成工业机器人有点焊、弧焊、装配、喷漆等机器人,主要用于现代化的工厂和柔性加工系统中。
下面简单的介绍一下码垛机器人是怎么工作的:首先把托盘从托盘库中调出,放到预先设置好的位置,只要货物输送机旁的传感器感应到货物,码垛机器人就会根据系统预设的程序把堆放好的货物抓起,并依次按照一定的顺序排列在托盘上,不断的重复上述过程,直到把托盘装满,货物装满后,托盘输送机就会把托盘运送到下一个需要工作的地方。
工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机器,通过快换装置可以更换不同的末端执行器,提高工业机器人的工作效率。
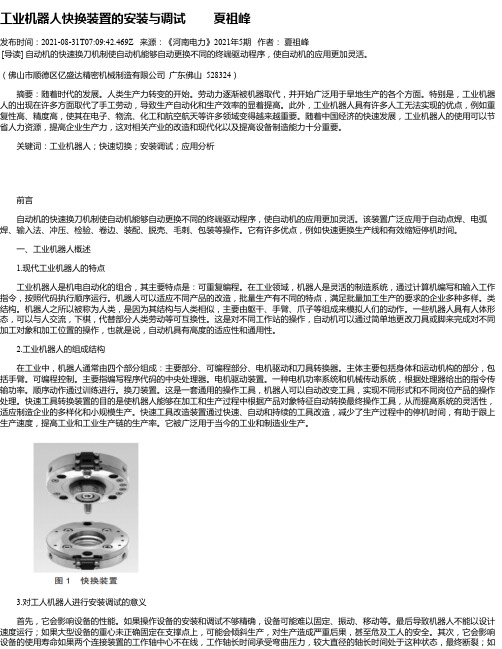
如图2所示为末端执行器的自动换接系统,快换装置通常由主盘和工具盘组成,主盘安装在工业机器人手腕上,工具盘与末端操作器连接。
快换装置的释放和夹紧可以由主盘和工具盘通过气动的形式来实现。
当操作器处于释放状态时,主盘上的释放口开始供气,产生的推力使活塞杆处于下压状态。
钢球收于内侧。
当操作器需要夹紧时,主盘上的夹紧口开始供气,主盘内活塞拉力和内部弹簧使活塞杆回拉,并由钢球将工具侧定位夹紧套按压在着座面上。
排气口在需要时,可进行气体的排放,保证气路的畅通。
而检测口,则与压力开关相接,检测快换装置的连接情况。
图1 快换装置的工作状态4 工业机器人快换装置的电路气路整体结构工业机器人快换装置由主盘和工具盘组成,主盘安装在工业机器人手腕上,工具盘与末端执行器通过气动的方式实现连接。
快换装置的内部结构比较复杂,通常有弹簧、钢球,保证其连接的精度,主盘和工具盘也通过气动的形式相连接。
主盘上有释放口、夹紧口、排气口和检测口以及气爪气口,通过给不同的气口通气,可使其发生相应的动作。
根据图2安装相应的气阀,安装气路之前关闭气泵,选择正确尺寸的气动接口。
电磁阀的气管通过安装板内层气源及执行器相连,使系统气管整齐。
其气管不要交叉扭曲,防止管路受阻。
不仅要对其工装进行设计还要对其气路、电路进行设计和连接。
根据气路动作的触发信号,选用电磁阀,电磁阀的信号来自于工业机器人的控制器,将此类I/O信号写入示教器中,进行后续程序编辑的变量。
其中输入信号有:压力开关、气爪上的磁性开关,输出信号有:4个电磁阀位置信号,电机触发信号,如图3所示。
连接后,气路和电路运行良好,可进行相应的机器人程序调试运行。
图2 快换装置的气路电磁阀上的电磁信号来源于机器人控制器,信号电压24V。
辨识I/O模块24V 和0V端口,注意电磁阀信号的正负极及在示教器中信号的变量。
图3 输入控制器模块IO信号注意事项:1)安全操作,在连接电路或气路前,保证关闭电源和气源。
2)紧固器件时,选用合适的工具,使用力不能过小,也不可过大。
3)安装系列阀前,理清安装顺序。
5 工业机器人的运行程序5.1 运行环境1.轴孔装配机器人工作站这组工业机器人由一台六轴机器人本体,伺服箱,工作台和工具架组成。
我们机器人需要将小型圆柱体放到工具台上的小型料盘里,然后更换末端执行器,使用带有电动式的打磨机打磨小圆柱体。
首先,启动机器人伺服,将机器人首先运行到工具架上夹持末端执行器的正上方,并缓缓下降,连接夹持式末端执行器,行走到小圆柱体的上方,开始夹持小圆柱体,接着运行到料盘A上方,释放小圆柱体到料槽里。
然后,机器人运行到工具架上夹持式末端执行器的上方,缓缓下降,并且释放末端执行器。
然后运行到电动式末端执行器的上方,连接电动式末端执行器,运行到料盘上方小圆柱体处,开始打磨小圆柱体的上方。
打磨结束后,将机器人运行到工具架的电动式末端执行器的上方,缓缓下降,释放电动式末端执行器。
然后,在更换夹持式末端执行器,将小圆柱体夹持到料盘B中。
在我们这个轴孔装配的工作站中,我们在进行对物料小圆柱体的搬运和加工这一步骤中变化使用了末端执行器,首先使用夹持式末端执行器,夹持式末端执行器对圆柱体,方形块等等能够很好的进行移动,然后,我们在其运行的过程当中,变换末端执行器,使用了带电动式的小磨头,从而对小圆柱体进行打磨的作业,这其中,就用到了我们的快换装置,从而可以是机器人在很短的时间内完成多功能作业。
2.奖盘包装机器人工作站这组是一整套工业机器人生产线,由四组六轴工业机器人,一组四轴机器人,三个工具架,两个工作台,AGV小车组成。
首先由机器人A将金牌吸附运行到工作台1上进行扫码,然后再将金牌吸附到流水线上,启用升降台将金牌移到左侧拍照,然后再由机器人B使用单吸附式末端执行器将奖盘吸附到摄像头处,再运行到工作台2上,此时启用四轴机器人进行涂胶,接着更换末端执行器,在这里,尤其注意两个末端执行器的更换口。
六轴机器人B使用四吸附式末端执行器将金牌吸附到工作台B上,然后六轴机器人B将奖盘吸附到工具架a上,六轴机器人C将奖盘吸附到料盘b上,并由六轴机器人C将奖盘吸附到料盘b上,此时六轴机器人D到料盘e取出上顶盖,机器人D吸住顶盖到摄像机拍照定位,取完照片后再由机器人C吸附到工具架b上,然后经由AGV小车吸上奖盘送到展架上。
在我们这个奖盘包装的工作站中,我们在其中需要将金牌放到奖盘里,需要使用到不同的末端执行器,这样,我们设计的快换装置就在其中起到至关重要的作用,在工作过程当中,首先我们需要四吸式吸盘将奖盘移到工作台上,然后使用单吸式吸盘将奖牌移动到奖盘里,这套动作里用到了两个不同结构特征的物料,所以,我们使用两个不同的末端执行器进行操作。
5.2 动作运行流程机器人快换器的动作,可分解成为“移到工具架”、“卸下末端执行器”、“移动到另一个末端执行器的上方”、“连接末端执行器”、“抓取工件”等一系列任务。
5.3 指令5.3.1 运动指令运动指令用来实现以指定速度、特定路线模式等将工具从一个位置移动到另一个指定位置。
以下列举了一些常用的指令:如可以使末端执行器实现点到点运动的PTP指令,使末端执行器实现线性运动的Lin指令,使机器人末端做圆弧运动的Circ指令,还有可以实现位移运动的Movj指令。
图4 TCP末端圆弧运动简图5.3.2 系统功能指令系统功能指令通常有赋值指令(=)、注解指令(//)、设置机器人等待时间的waittime指令,还有用于停止所有程序执行的stop指令。
赋值指令主要是为了在程序运行中为各种变量进行赋值操作,就是将某一数值赋给某个变量,其左侧为变量,右侧为表达式。
注解指令主要是为了说明这个程序是执行什么样的操作,便于理解。
WaitTime指令主要用于设置机器人的等待时间,单位为ms。
5.3.3 流程控制指令在本文轴孔装配机器人工作站和奖牌包装机器人工作站调试中用到了调用指令(CALL)和等待指令(WAIT),他们都属于流程控制指令。