基于LabVIEW和J1939协议的CAN总线通讯平台构建
CAN 总线的特点及 J1939 协议通信原理、内容和应用

控制器局域网络(CAN)是德国 Robert bosch 公司在 20 世纪 80 年代初为汽车业开发的一种串行数据通 信总线。CAN 是一种很高保密性,有效支持分布式控制或实时控制的串行通信网络。CAN 的应用范围遍及 从高速网络到低成本底多线路网络。在自动化电子领域、发动机控制部件、传感器、抗滑系统等应用中, CAN 的位速率可高达 1Mbps。同时,它可以廉价地用于交通运载工具电气系统中,如灯光聚束、电气窗口 等,可以替代所需要的硬件连接。它采用线性总线结构,每个子系统对总线有相同的权利,即为多主工作 方式。CAN 网络上任意一个节点可在任何时候向网络上的其他节点发送信息而不分主从。网络上的节点可 分为不通优先级,满足不同的实时要求。采用非破坏性总线裁决技术,当两个节点(即子系统)同时向网络 上传递信息时,优先级低的停止数据发送,而优先级高的节点可不受影响地继续传送数据。具有点对点、 一点对多点及全局广播接收传送数据的功能。
CAN 总线
节点 1 节点 2 节点 3 节点 4
PC 机
图 2 CAN 局域网 软件的编写主要包括对寄存器的配置、硬件初始化、中断调用、数据通信几大模块。中断调用中包括 数据中的中断接收、中断发送,以及错误处理、报警等模块。通信模块又分为数据的发送、接收、请求等。 综上所述,J1939 通信协议解决了如下问题。 (I)优先权问题。如自动换挡要求减油门,巡航控制同时要求增油,而 ASR 则要求减油门以维持驱动 轴的低扭矩。根据重要程度,则应确定换挡优先,协议能定义各个子系统的优先权顺序。 (2)灵活性问题。因为各个子系统都是不同类型的控制系统,网络应具备将各个子系统有机地融合在 一起的能力。 (3)可扩展性。即需要增加新的子系统时,不需要对基本系统作修改。 (4)独立性。每个子系统都可以独立工作,某个子系统出现故障时并不影响其他系统的正工作。 (5)为满足不同控制系统的要求,应具有高的数据传输速率带宽,具有通用的故障诊断接口诊断协议。
基于J1939整车控制器CAN协议说明文档

0~255 循环
电机最大转速 电机目标转速,,0~15000,(0~15000)
波特率 500kb/s 发送周期
10ms 分辨率 0.1RPM/位 0.1Nm/位
0.1RPM/位
报文名称
报文1 formVCUtoMCU
发送节点 接收节点
VCU
MCU
字节
位
0
1
2
3
0
1
2
4
3
4
5
6
7
5
6
7
P
R
6
0
信号名称
6)CAN总线上各部件均有终端电阻(120Ω ),同时,终端电阻同网络线之间通过跳线连接,以便灵活搭配,方便调试使用,装车时去掉;
DC/DC
SA=214 新定义
7)终端电阻头(120Ω )安装在网络线两端,做在线束中;
充电机
SA=229 新定义
8)所有通信电缆应尽量离开动力线(0.5m以上)、离开12V控制线(0.1m以上);
报文名称
报文2 formVCU to Display
发送节点 接收节点
VCU DISPLAY
字节
位
0
1
0
1
2
2
3
4
5
6
7
3
4
0
1
2
5
3
4
5
6
7
6
7
P
R
3
0
信号名称
MotorSpeed
MCUOverVol MCULowVol MCUOverCurr MCUOverTem MCUDriveFault MotorOverTemp MotorState
基于LabVIEW的CAN总线通信系统的设计与实现
当 前 ,船 舶 上 各 种 系 统 和 设 备 的 数 据 与 信 息 资 源 共 享 需 求 越 来越 突 出 , 全船 信 息 化 成 为 发 展 的必 然 , 这 是 当 前 国 外 船 舶 技 术 发展 的新 趋 势 。 究其原因 , 一方面 , 为 使 现 代 船 舶 适应 新 设 备 ,
比较 适 合 于 船 舶 上 应用 的 总 线 有 C A N总线 、 L o n Wo r k s总
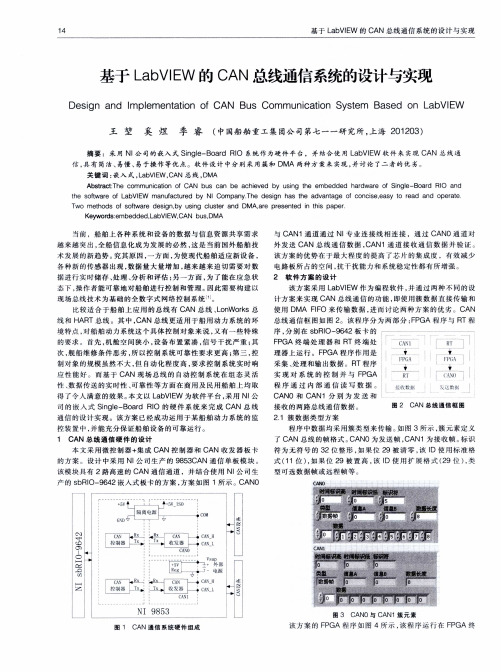
该方案采用 L a b V l E W 作 为编 程 软 件 , 并通 过 两 种 不 同 的 设 计方 案来 实 现 C A N总线通信的功能, 即 使 用簇 数据 直 接 传 输 和 使用 D MA F I F O来传输数据 , 进 而 讨 论 两 种 方 案 的 优 劣 。C A N 总线 通 信 框 图如 图 2 。该 程 序 分 为 两 部 分 : F P G A程序 与 R T程
t h e s o f t wa r e o f L a bVl EW ma nu f a c t u r e d by NI Compan y Th e des i gn ha s t he ad v an t ag e o f co n ci s e, e as y t o r e ad a nd ope r at e
F P GA 终 端 处 理 器 和 R T终 端 处 理 器 上运 行 。F P GA 程 序 作 用 是 采集 、 处 理 和输 出数 据 。R T程 序
实现 对 系 统 的 控 制 并 与 F P G A 程序 通 过 内部 通 信 读 写 数 据 。 C AN O和 C A N1分 别 为 发 送 和 c F — 接 收 的两 路 总 线 通 信数 据。 + 2 , 1 簇 数 据 类 型 方案
CAN卡与使用J1939应用层协议设备间的通信

CAN卡与使用J1939应用层协议设备间的通信CAN(控制器局域网)是一种广泛应用于汽车和工业领域的通信协议。
它是一种高速且可靠的通信协议,可以在设备之间传输数据。
J1939应用层协议是一种基于CAN协议的汽车网络协议,主要用于传输车辆的数据和控制信息。
CAN卡与使用J1939应用层协议的设备之间的通信是通过CAN总线完成的。
CAN总线上的每个设备都有一个唯一的标识符,用于识别设备和数据的发送者和接收者。
设备可以通过CAN总线上的消息进行通信,并使用J1939协议定义的数据格式和命令进行交互。
在通信过程中,设备可以发送和接收不同类型的消息。
例如,设备可以发送数据消息,用于传输车辆传感器的测量值或控制命令。
设备还可以发送控制消息,用于设置其他设备的状态或配置参数。
所有的消息都有一个固定的格式,包括消息ID、消息数据和校验字段。
CAN卡在通信过程中扮演着关键的角色。
它负责将消息从一个设备传输到另一个设备,并确保消息的正确传输和接收。
CAN卡上的硬件和软件模块实现了CAN协议的功能,包括消息的发送和接收、消息的过滤和缓冲等。
为了进行CAN与J1939协议的通信,需要使用适配器将CAN卡的接口转换为J1939协议的接口。
适配器相当于一个转换器,它能够读取CAN总线上的CAN消息,并将其转换为J1939协议可以理解的格式。
适配器还可以将J1939协议的消息转换为CAN消息,发送到CAN总线上。
通过CAN卡和适配器,设备可以实现与其他设备之间的通信和数据交换。
例如,在汽车上,各种传感器可以使用CAN卡与车辆的控制器通信,传输引擎温度、车速等数据。
同时,控制器也可以通过CAN卡发送命令到其他设备,实现对车辆的控制和调节。
总之,CAN卡与使用J1939应用层协议的设备之间的通信是通过CAN 总线和适配器实现的。
CAN卡负责处理CAN协议的硬件和软件功能,而适配器负责将CAN消息转换为J1939协议的格式。
这种通信方式在汽车和工业领域得到了广泛应用,可以实现设备之间的高速和可靠的数据传输。
基于 LabVIEW 的工控CAN 总线通信设计
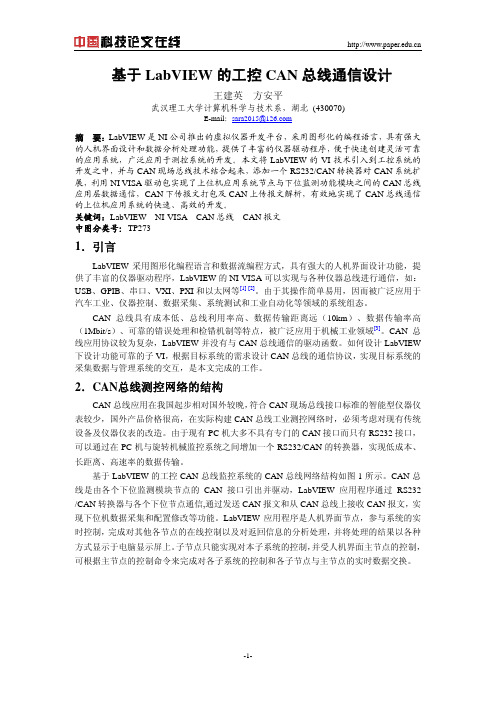
(430070) Abstract LabVIEW is a kind of Virtual Instruments Development Platform that is developed by National Instruments Corporation.It adopts the graphic programming language,and can provide lots of instrument driver programs for users together with powerful functions of human-computer interface design and data analysis and processing,users can establish flexsible and reliable application system quickly with it,so LabVIEW is widely used in control system development.This paper presents the introduction of VI technology into the industrial control system, and combines VI technology with field bus CAN.By adding a RS232/CAN converter,it implements application-level data communication, packing the down-transmission CAN message and separating message between the host-computer application system and the monitoring function modules. The host-computer application system of CAN bus can be quickly and effectively developed with this method that introduced in this paper. Key words: LabVIEW, NI-VISA CAN bus CAN message 作者简介: 王建英:女,1985-,硕士研究生,研究方向:嵌入式系统,E-mail:sara2015@ 方安平:女,硕士生导师,研究方向:嵌入式系统
CAN总线的特点及J1939协议通信原理、内容和应用
CAN总线的特点及J1939协议通信原理、内容和应用众多国际知名汽车公司早在20世纪80年代就积极致力于汽车网络技术的研究及应用。
迄今已有多种网络标准,如专门用于货车和客车上的SAE的J1939、德国大众的ABUS、博世的CAN、美国商用机器的AutoCAN、ISO的VAN、马自达的PALMNET等。
在我国的轿车中已基本具有电子控制和网络功能,排放和其他指标达到了一定的要求。
但货车和客车在这方面却远未能满足排放法规的要求。
计划到2006年,北京地区的货车和客车的排放要满足欧Ⅲ标准。
因此,为了满足日益严格的排放法规,载货车和客车中也必须引入计算机及控制技术。
采用控制器局域网和国际公认标准协议J1939来搭建网络,并完成数据传输,以实现汽车内部电子单元的网络化是一种迫切的需要也是必然的发展趋势。
1 CAN总线特点及其发展控制器局域网络(CAN)是德国Robert bosch公司在20世纪80年代初为汽车业开发的一种串行数据通信总线。
CAN是一种很高保密性,有效支持分布式控制或实时控制的串行通信网络。
CAN的应用范围遍及从高速网络到低成本底多线路网络。
在自动化电子领域、发动机控制部件、传感器、抗滑系统等应用中,CAN的位速率可高达1Mbps。
同时,它可以廉价地用于交通运载工具电气系统中,如灯光聚束、电气窗口等,可以替代所需要的硬件连接。
它采用线性总线结构,每个子系统对总线有相同的权利,即为多主工作方式。
CAN网络上任意一个节点可在任何时候向网络上的其他节点发送信息而不分主从。
网络上的节点可分为不通优先级,满足不同的实时要求。
采用非破坏性总线裁决技术,当两个节点(即子系统)同时向网络上传递信息时,优先级低的停止数据发送,而优先级高的节点可不受影响地继续传送数据。
具有点对点、一点对多点及全局广播接收传送数据的功能。
随着CAN在各种领域的应用和推广,对其通信格式的标准化提出了要求。
1991年9月Philips Semiconductors制定并发布了CAN技术规范(Versio 2.0)。
CAN卡与使用J1939应用层协议设备间的通信
CAN卡与使用J1939应用层协议设备间的通信CAN总线协议:对CAN协议的媒体访问控制子层的一些概念和特征做如下说明: (1)报文(Message) 总线上的报文以不同报文格式发送,但长度受到限制。
当总线空闲时,任何一个网络上的节点都可以发送报文。
(2)信息路由(Information Routing) 在CAN中,节点不使用任何关于系统配置的报文,比如站地址,由接收节点根据报文本身特征判断是否接收这帧信息。
因此系统扩展时,不用对应用层以及任何节点的软件和硬件作改变,可以直接在CAN中增加节点。
(3)标识符(Identifier) 要传送的报文有特征标识符(是数据帧和远程帧的一个域),它给出的不是目标节点地址,而是这个报文本身的特征。
信息以广播方式在网络上发送,所有节点都可以接收到。
节点通过标识符判定是否接收这帧信息。
(4)数据一致性应确保报文在CAN里同时被所有节点接收或同时不接收,这是配合错误处理和再同步功能实现的。
(5)位传输速率不同的CAN系统速度不同,但在一个给定的系统里,位传输速率是唯一的,并且是固定的。
(6)优先权 由发送数据的报文中的标识符决定报文占用总线的优先权。
标识符越小,优先权越高。
(7)远程数据请求(Remote Data Request) 通过发送远程帧,需要数据的节点请求另一节点发送相应的数据。
回应节点传送的数据帧与请求数据的远程帧由相同的标识符命名。
(8)仲裁(Arbitration) 只要总线空闲,任何节点都可以向总线发送报文。
如果有两个或两个以上的节点同时发送报文,就会引起总线访问碰撞。
通过使用标识符的逐位仲裁可以解决这个碰撞。
仲裁的机制确保了报文和时间均不损失。
当具有相同标识符的数据帧和远程帧同时发送时,数据帧优先于远程帧。
在仲裁期间,每一个发送器都对发送位的电平与被监控的总线电平进行比较。
如果电平相同,则这个单元可以继续发送,如果发送的是“隐性”电平而监视到的是“显性”电平,那么这个单元就失去了仲裁,必须退出发送状态。
CAN总线的特点及J1939协议通信原理
CAN总线的特点及J1939协议通信原理1. 高速传输:CAN总线的标准通信速率可达到1 Mbps的速度,满足高速数据传输的需求。
2.高可靠性:CAN总线采用差分驱动和抗干扰设计,能够抵抗电磁干扰和噪音等外界因素的干扰,保证数据传输的可靠性。
3.多主机通信:CAN总线采用分布式控制模式,多个节点可以同时发送和接收数据,实现了多主机之间的并行通信。
4.灵活性:CAN总线支持节点的动态扩展和删除,系统维护方便灵活,能够适应不同的应用场景。
5.低成本:CAN总线采用双线制结构,线缆连接简单,成本较低。
J1939协议通信原理:J1939协议是一种用于商用车辆的CAN总线通信协议,具有以下特点:1.数据帧结构:J1939协议使用帧结构进行数据传输,分为数据链路层和应用层。
数据链路层负责数据的传输和错误检测,应用层负责数据的格式解析和处理。
2.参数标识:J1939协议采用参数标识符(PGN)来唯一标识数据,每个PGN对应一个特定的数据类型和数据格式。
3.多节点通信:J1939协议支持多节点之间的并行通信,节点之间可以同时发送和接收数据。
4.数据传输方式:J1939协议支持点对点传输和广播传输两种方式。
点对点传输是指数据只发送给特定的节点,广播传输是指数据发送给所有节点。
5.优先级规则:J1939协议定义了数据帧的优先级规则,不同的PGN 根据其重要性和紧急程度进行优先级排序。
高优先级的数据帧可以中断低优先级的数据帧的传输。
6.故障容错:J1939协议采用冗余机制和错误检测技术,能够提高系统的可靠性和容错性。
如果一个节点发生故障,其他节点可以继续正常工作。
J1939协议通信原理可以简略概括为以下几个步骤:1.初始化:每个节点在启动时需要进行初始化,进行总线访问、参数配置等操作。
2.数据传输:节点之间通过总线发送和接收数据帧,数据帧可以是点对点传输或广播传输。
3.优先级处理:接收到的数据帧按照优先级进行处理,高优先级的数据帧可以中断低优先级的数据帧的传输。
CAN总线的特点及J1939协议通信原理内容和应用

CAN总线的特点及J1939协议通信原理内容和应用1.高度可靠性:CAN总线采用了差分信号线的设计,可以有效抵抗电磁干扰和噪声,保证通信的稳定性和可靠性。
2.实时性强:CAN总线的通信速率高,能够快速传输数据,实现实时性要求高的应用。
3.多主机通信:CAN总线采用了仲裁机制,可以实现多个节点的同时通信,提高总线的利用率。
4.线路简单:CAN总线仅需要两根差分信号线和一个地线即可完成通信,布线简洁,成本低。
5.安全性高:CAN总线具有错误检测和纠正能力,可以及时检测通信中的错误,并进行相应的纠正。
6.扩展性强:CAN总线支持节点的动态加入和退出,使得系统的扩展性更强。
J1939协议通信原理:J1939是一种基于CAN总线的工业通信协议,主要应用于商用车辆和重型机械设备。
它采用了点到点通信的方式,通过发送和接收不同类型的消息来实现数据的传输。
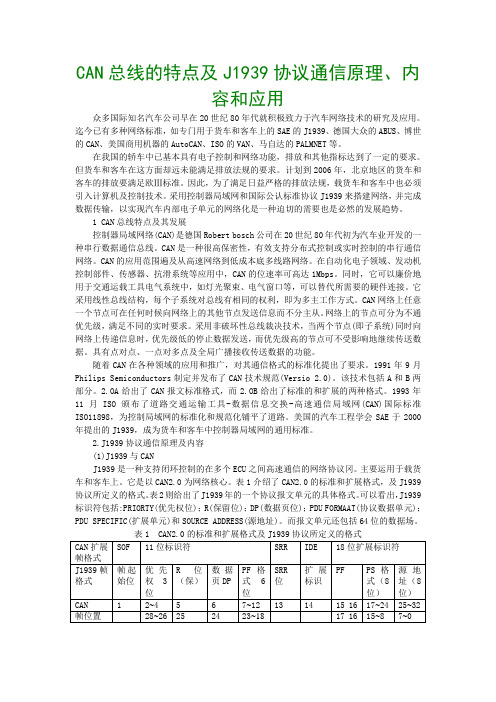
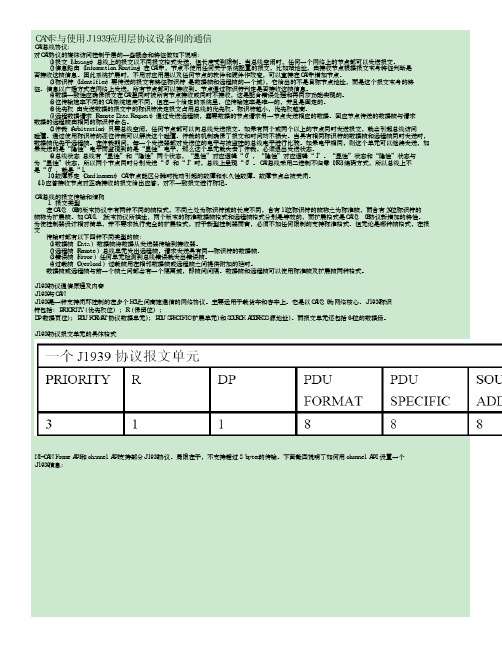
J1939协议的通信原理如下:1.消息格式:J1939协议中的消息由一个29位的ID、8字节的数据和一个优先级组成。
ID用于标识消息的类型,数据用于传输实际的信息,优先级用于确定消息的重要性和处理顺序。
2.帧格式:J1939协议中的消息被分为4个不同的帧类型,分别是数据链路层帧、网络层帧、传输层帧和应用层帧。
每个帧类型都有不同的格式和功能,用于完成数据的传输和处理。
3. 仲裁机制:J1939协议采用了CSMA/CD(Carrier Sense Multiple Access with Collision Detection)仲裁机制,通过监听总线上的数据来判断是否有其他节点正在发送消息,以避免冲突。
4.时钟同步:J1939协议要求所有节点使用相同的时间基准,通过同步时钟来确保节点之间的通信顺序和时间同步。
5.网络管理:J1939协议中的每个节点都有一个唯一的节点地址,通过网络管理机制来管理节点的加入和退出,以及节点之间的关系和通信规则。
J1939协议通信内容:J1939协议定义了多种不同类型的数据消息,包括数据传输消息、诊断消息、控制消息等。
基于LabVIEW和J1939协议的CAN总线通讯平台构建
基于LabVIEW和J1939协议的CAN总线通讯平台构建作者:周跃钢来源:《汽车科技》2011年第06期摘要:使用NI LabVIEW软件开发平台和PXI模块化仪器系统中的CAN通讯模块,创建过滤识别J1939协议报文标识符ID及多帧报文按协议格式解析接收和封装发送的设计方法,构建基于J1939协议的CAN总线通讯平台,完成整车电环境半实物仿真、发动机台架试验CAN总线信息的收发解析、存贮及实时显示。
关键词:LabVIEW软件;J1939协议;CAN总线;PXI测控装置中图分类号:TP335 文献标志码:A 文章编号:1005-2550(2011)06-0018-05Build of CAN Communication Platform Based on LabVIEW and J1939 ProtocalZHOU Yue-gang(Dongfeng Commercial Vehicle Technical Center of DFL,Wuhan 430056,China)Abstract:Using NI LabVIEW software development platform and the CAN communication module in the PXI module instrumentation,design a process for filtering and identificating ID ofJ1939 protocol and analyzing multi-frame message to receive and packaging to send. Building a communication platform based on the J1939 protocol CAN bus,complete vehicle electrical environment-loop simulation,and engine test bed information on the CAN bus transceiver analysis,and storage and real-time display.Key words:LabVIEW;J1939 protocol;CAN bus;PXI monitoring devices进入21世纪以来,商用车CAN总线网络的应用得到了异常迅猛的发展。
基于J1939的车载CAN总线模拟系统的设计

2 . U n i v e r s i t y o f C h i n e s e A c a d e m y o f S c i e n c e s , B e i j i n g 1 0 0 0 4 9 , C h i n a
Ab s t r a c t : T h e i ma g e p r o c e s s i n g s y s t e m d e s c r i b e d h e r e i s b a s e d o n t h e h i g h s p e e d a n d l a r g e a r r a y d e t e c t o r CMV 2 0 0 0 . I n o r d e r t o s i mu l t a n e o u s l y c o l l e c t a n d p r o c e s s t w o p i e c e s o f 2 Kx 1 K a ra y i ma g e i n t h e r a t e o f 1 0 0 f o s ,
C MV 2 0 0 0高 速 大 面 阵信 号 处 理 和 完 整 性 仿 真 分 析
安 平 凹 , 尹 达 一
1 .中国科学院 上海技术物理研 究所 , 上海 2 0 0 0 8 3 2 .中国科 学院大学, 北京 1 0 0 0 4 9
摘
要: 基于 C MV 2 0 0 0高速大 面阵探 测器 构建 了图像处理系统 , 为了在 1 0 0 f 0 s 帧率 的情况下 同时采集和处理 2片 2 K x
( O D T ) 和数控阻抗 ( D C I ) 技术进行阻抗 匹配 时数据 线的反射 引起 的信 号上 冲和下 冲都 在器 件要求 的范 围之 内, 数 据线 在8 a r i l 线宽 8 m i l 间距 2 0 0 0 m i l 耦合距 离的情况下 串扰噪声在 信号 的噪声 容 限之 内等结论 。研 究 了高 带宽 的高速大
基于LabVIEW的CAN总线通信系统的设计与实现

图 5 总线参数配置窗口 图 6 数据发送窗口
图 4 发送子程序流程图 ( 2) 数据接收 接收数据 可采用查询方式或中断方式。在 某一段时间内, CAN 总线并不是 总是在活 动, 为了提 高效率, 可 采用中断方式 [ 7] 。在初 始化 程 序中 必须 打 开接 收中 断。在 中 断服务子程序中, 判断是否有接收中断标志, 有则读取接收缓冲 区数据。为了防止接收 缓冲区 数据溢 出, 可 开辟一 个循环 接收 数据队列来暂时存储 数据, 主程序则 通过查 询该队 列来获 得总 线数据。
第 27卷第 8期 2010年 8月
计算机应用与软件 Com puter Applications and Softw are
Vo l 27 No. 8 Aug. 2010
基于 LabV IEW 的 CAN总线通信系统的设计与实现
王锦坚 洪添胜
( 华南农业大学工程学院 广东 广州 510642 )
摘 要 介绍一种 基于 CAN 总线的通信系统。采用两个 CAN 节点 进行相互 通信, 这两个 节点分 别为自 主研发 的基于 AT89C52 单片机的 CAN 节点和瑞典 K vaser公司的 CAN 总线分析仪, 并使用 N I公司的 LabV IEW 软件设计上位机程序, 成功地实现了 CAN 总 线系统的通信。 关键词 CAN 总线 通信系统 L abV IEW
3 软件设计
3. 1 CAN 节点的软件部分设计
本节点的软件编程主要包括 单片机 初始化、CAN 控制器 的 初始化、CAN 总线数据的发送和接 收等几 个部分。初 始化设 置 主要包括通信的波特率的 设置、报文滤 波器的 设置和 输出模 式 的设置。主程序的流程图如图 3所示。
图 2 CAN 节点电路原理图 图 2为 CAN 节点的硬件电路原理图。从图中 可以看出, 电 路主要由五个部 分所 构成: 微 控制 器 89C52、独立 CAN 通信 控 制器 SJA 1000、CAN 总线收发器 T JA 1050、显示电路和控制电路。 微控制 器 89C52 负责 SJA 1000 的初始 化, 通 过控制 SJA1000实 现数据的接收 和发送等通信任务。 SJA 1000的 A D0~ AD 7连接
基于J1939协议的CAN总线诊断系统设计
工程技术DOI:10.16660/ki.1674-098X.2020.10.038基于J1939协议的CAN总线诊断系统设计①刘会娟1 王斌1 杨洋2 李斌2(1.江苏徐州工程机械研究院 江苏徐州 221008;2.江苏师范大学电气工程及自动化学院 江苏徐州 221008)摘 要:为了实现在线的CAN总线诊断分析,并且能够直观有效检测人为带来的总线标识编码错误,本文给出了一种基于J1939协议的CAN总线诊断系统设计,首先介绍了J1939的参数组PGN、推荐参数编码SPN,然后重点介绍了基于J1939协议的CAN总线诊断系统的软硬件实现方法,选择参数组编码PGN标识位作为诊断的唯一分类标准,经验证所设计的诊断系统能够进行现场CAN总线在线诊断,诊断效果直观有效。
关键词:J1939协议 CAN总线 诊断系统中图分类号:TP335 文献标识码:A 文章编号:1674-098X(2020)04(a)-0038-03①作者简介:刘会娟(1985—),女,安徽萧县人,硕士,工程师,研究方向:工程机械电控系统开发与应用。
现有技术中,工程机械电控系统本身的复杂的线束和关联控制增加了故障诊断及维修的难度,各系统(动力、传动、制动等)信息共享效率较低,无法形成有效的数据处理以获得持续工况下的综合诊断。
现有技术是安排专业人员选择CAN总线分析设备与软件在电脑上进行操作,现场采集数据,同时连接电脑或将数据转存至电脑载体通过特定软件进行总线分析,操作人员和分析周期都存在一定的不可控因素。
为此设计了一款简易直接的基于J1939的CAN总线诊断系统,在装机状态进行在线分析,操作简单,具备独立电源,整个诊断过程通过控制系统的CAN总线预留接口实现,可以灵活选择公有协议部分诊断或私有部分诊断,也可以通过上位机选择特殊信号对某一PGN (参数组编号Parameter Group Number )监测与参数诊断,能够更好地满足不同总线的需求,并且简化了总线的诊断过程,方便及时处理总线故障。
基于CAN总线的多ECU通信平台设计

基于CAN总线的多ECU通信平台设计摘要:介绍CAN总线及其通信协议J1939,并设计基于CAN总线的多ECN 通信平台的硬件结构;阐述节点ECN通信的软件设计方法,在仿真试验的条件下实现数据通信的功能。
试验表明平台运行稳定可靠。
引言随着集成电路和单片机在汽车上的广泛应用,现代汽车上的电子控制器的数量越来越多,常见的有发动机的电子燃油喷射装置、防抱死制动装置(ABS)、安全气囊装置、电动门窗装置、主动悬架等。
电控系统的增加虽然提高了轿车的动力性、经济性和舒适性,但随之增加的复杂电路也降低了汽车的可靠性,增加了维修的难度。
从布线角度分析,传统的电子气系统大多采用点对点的单一通信方式,相互之间少有联系,这样必然造成宠大的布线系统。
因此,一种新的概念汽车上电子控制器局域网络CAN,也就应运而生。
为使不同厂家生产的零部件能在同一辆汽车上协调工作,必须制定标准。
按照ISO有关标准,CAN的拓扑结构为总线式,因此称为CAN总线。
CAN总线被设计作为汽车环境中的微控制器通信,在车载各电子控制装置ECN之间交换信息,在车载各电子控制装置ECN之间交换信息,形成汽车电子控制网络。
控制器局域网CAN(Controller Area Network)是一种多主方式的串行通信总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。
CAN在汽车上的应用,具有很多行业标准或者是国际标准,比如国际标准化组织(ISO)的ISO11992、ISO11783以及汽车工程协会(Society of AutomoTIve Engigeers)的SAE J1939。
CAN总线已经作为汽车的一种标准设备列入汽车的整车设计中。
图11 CAN总线特点及其通信协议1.1 CAN总线简介CAN通信协议规定了4种不同的帧格式,即数据帧、远程帧、错误帧和超载帧。
基于以下几条基本规则进行通信协调:总线访问、仲裁、编码/解码、出错标注和超裁标注。
基于Labview的CAN总线通信仿真
基于虚拟仪器的CAN总线通信仿真控制器局部网(CAN-CONTROLLERAREANETWORK)是BOSCH公司为现代汽车监测和控制领先推出的一种多主机局部网,由于其卓越性能现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门.CAN是一种多主方式的串行通讯总线。
一个由CAN总线构成的单一网络中.理论上可以挂接无数个节点。
实际应用中,节点数目受网络硬件的电气特性所限制。
CAN可提供高达1Mbit/s的数据传输速率.这使实时控制变得非常容易。
另外。
硬件的错误检定特性也增强了CAN的抗电磁干扰能力。
CAN总线有以下特点:1)CAN可以是对等结构,即多主机工作方式,网络上任意一个节点可以在任意时刻主动地向网络上其它节点发送信息,不分主从,通讯方式灵活。
2)CAN网络上的节点可以分为不同的优先级,满足不同的实时需要。
3)CAN采用非破坏性仲裁技术,当两个节点同时向网络上传送信息时,优先级低的节点自动停止发送,在网络负载很重的情况下不会出现网络瘫痪。
4)CAN可以点对点、点对多点、点对网络的方式发送和接收数据,通讯距离最远10km(5kb/s),节点数目可达110个。
5)CAN采用的是短帧结构,每一帧的有效字节数为8个,具有CRC校验和其它检测措施,数据出错几率极小。
CAN节点在错误严重的情况下,具有自动关闭功能,不会影响总线上其它节点操作。
6)通讯介质采用廉价的双绞线,无特殊要求,用户接口简单,容易构成用户系统.1 CAN总线工作机理1。
1 位仲裁要对数据进行实时处理。
就必须将数据快速传送,这就要求数据的物理传输通路有较高的速度。
在几个站同时需要发送数据时.要求快速地进行总线分配。
实时处理通过网络交换的紧急数据有较大的不同。
一个快速变化的物理量.如汽车引擎负载,将比类似汽车引擎温度这样相对变化较慢的物理量更频繁地传送数据并要求更短的延时。
CAN总线以报文为单位进行数据传送.报文的优先级结合在11位标识符中.具有最低二进制数的标识符有最高的优先级。
基于J1939协议的LabVIEW平台发动机通信研究
基于J1939协议的LabVIEW平台发动机通信研究潘运平;李畅;张俊;汪洋;张松乔【期刊名称】《现代机械》【年(卷),期】2016(000)002【摘要】随着CAN总线在车载通信上使用的普及及发展,J1939通信协议在汽车领域得到了广泛的应用.然而现阶段在对J1939协议的解析及NI硬件平台、LabVIEW软件平台上的开发、应用存在许多不足,系统性、可读性、通讯稳定性、精度欠缺.针对以上问题,以NI公司CAN通讯硬件为硬件基础,以LabVIEW为软件开发平台,重点研究了J1939传输协议,解析了J1939协议下的数据帧结构及通讯规则,以J1939协议下以道依茨(Deutz_can_spec_emr2_5_engl)柴油发动机组报文接收为例,对其通信的硬件平台进行了搭建,并且可读性高,对便于维护的LabVIEW 软件及NI-J1939工具包进行软件系统的编写.通过以上工作和对程序的调试,实现了CAN通讯数据的自发送和自接收,并且稳定性和精度得到了提升.实现了J1939协议在LabVIEW平台上的系统实验通讯,并为以后LabVIEW车载系统的开发、实现奠定基础.【总页数】8页(P62-69)【作者】潘运平;李畅;张俊;汪洋;张松乔【作者单位】武汉理工大学机电工程学院,湖北武汉430070;武汉理工大学机电工程学院,湖北武汉430070;武汉理工大学机电工程学院,湖北武汉430070;武汉理工大学机电工程学院,湖北武汉430070;武汉理工大学机电工程学院,湖北武汉430070【正文语种】中文【中图分类】TP311【相关文献】1.基于LabVIEW和J1939铱议的CAN总线通讯平台构建 [J], 周跃钢2.基于SAE J1939协议的发动机通信控制器仿真与设计 [J], 张大庆;张凤登;张晓霞;陈悫;黄成3.基于LabVIEW和J1939协议的发动机油耗台架测空平台 [J], 汪小芳;张军4.基于Labview和CAN通信协议的高集成化卫星姿轨控单机模拟与通信平台的设计 [J], 高海云; 孙国文; 景镇; 王俊; 汪灏; 尹超5.基于J1939协议的发动机转矩与转速控制研究 [J], 孟卫东因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
网络 , 行 整 车 V C 发动 机 E C 自动 变 速 箱 进 E U、 E U、 E U 汽 车组 合 仪 表 E U、 C 、 C 轮胎 防 抱 死 制动 E U 之 C 间 的数 据通 讯 。基 于 J 9 9协 议 的商 用 车 C N 总 13 A
线, 针对 单 片 机微 控 制 器 MC U节 点 的 MC +C N U A 控 制器 +C AN收发 器 的 C N通 讯 接 口 .在 车载 网 A 络控制 系统 中得 到 了大量应 用 : 而对 整车道 路试验 、
Ab t a t Us g NI L b E ot r e e o me tp a fr a d t e C o s r c : i a VI W s f n wa e d v l p n lt m n h AN c mmu i ai n mo u e i h XI mo u e o n c t d l n t e P d l o
Ke r s L b E ;1 3 rtc lCAN b s P ntr gd vcs ywo d : a Vl W J 9 9 poo o ; u ; XImo i i e ie on
进入 2 1世纪 以来 ,商用 车 C N总线 网 络 的应 A
用 得到 了异 常迅猛 的发 展。 今市 面上 满足 国 3 现 国 5排 放标 准 的商 用车 一例 外 的均 应 用 C N总 线 无 A
Bu l fCAN mmu ia i n P af r Ba e n La VI i o d Co n c to l to m s d o b EW n 1 3 r tc l a d J 9 9 P oo a
Z HOU Yu — a g e gn
( n fn o Do ge gC mmeca hceT c nc l e tro LI u a 3 0 6, ia rilVe il e h ia ne f C DF h n4 0 5 Chn ) W
v h c e ee t c le vr n n — o p smu a in, n n i e ts e n o mai n o h AN b s t n c ie n lss a d e il lc r a n i me t lo i lt i o o a d e gn e t d if r t n t e C u r s ev ra ay i , n b o a so a e a d r a - i ip a . tr g n e l t me d s l y
设 计 - 究 碉
d i .9 9 .s .0 5 2 5 .0 .60 5 o:03 6 /i n1 0 — 5 02 1 0 .0 1 js 1
汽 科 第6 01 1 车 技 期21 年1 月
周跃 钢
东风 汽 车 有 限 公 司 东 风 商 用 车 技 术 中 心 , 汉 4 0 5 ) 武 3 0 6
isrme tto d s n ap o esfr leiga d ie f c f gI f 1 3 rtc la da ayigmut fa sa et nt u nain, ei rc s o trn n d n f a n D o 9 pooo n n lz li rmemesg o g i f i i i J9 n -
基 于 L b IW 和 J 9 9协议 的 C N 总线通 讯 aVE 13 A 技 术 方法 实施 , 国 内汽 车行 业 P I 控 装 置 的应 在 X 测
rc ie a d p c a ig t e d ulig a c mmu iain pa o ae n te J9 9 p oo o e ev n a k gn o sn .B i n o d nc t lt r b sd o h 1 3 rtc lCAN b s c mpee o fm u ,o lt
析 的功能 需求 : ()A o 2 C N e模块 时序 不 受 P I X 仪器 时 钟 速率 控
制 ,无 法 与 P I时序 的其 它 测 量 参 数 同步 触 发 测 X
量。
发动机 台架试验 、整 车 电环 境 半实物 仿真 测试 的上
收 稿 日期 :0 10 — 3 2 l— 9 0
关 键 词 : a V E 软件 ; 9 9协 议 ; A 总 线 ;X 测 控 装 置 L b IW J 3 1 C N PI 中 图分 类号 : P 3 T 35 文 献标 志码 : A 文章 编 号 : 0 5 2 5 (0 1 0 — 0 8 0 10 — 5 0 2 1 )6 0 1— 5
摘 要 : 用 N a V E 软 件 开 发 平 台 和 P I 使 I b IW L X 模块 化仪 器 系统 中 的 C N通 讯 模 块 , 建 过 滤 识 别 J 9 9协 议 报 文 标 A 创 13
识 符 I 及 多帧 报 文 按 协 议 格 式 解 析 接 收 和 封 装 发 送 的 设 计 方 法 , 建基 于 J9 9协 议 的 C N 总 线通 讯 平 台 , 成 D 构 13 A 完 整 车 电环境 半 实物 仿 真 、 发动 机 台架 试 验 C N 总线 信 息 的 收 发解 析 、 A 存贮 及 实笔记 本 电脑 +C N通 讯模 块 , A
大都使 用价 格 昂贵 的 V co C N e 块 。 etr A o 模 测试 中存在 的 问题 : ( )X 测 控 装置 无 基于 J9 9协 议 的 C N 通 1P I 13 A 讯功 能 , 不能满 足试验 工况 对 C N总线 报 文信息 分 A