边缘检测算法提取道路边缘的设计与实现
Matlab在边缘检测与边界提取中的应用

Matlab在边缘检测与边界提取中的应用在计算机视觉领域中,边缘检测与边界提取是非常重要的任务。
边缘是图像中物体不同区域之间的分界线,边界提取则是通过检测图像中的边缘,从而凸显物体的轮廓。
边缘检测与边界提取在许多应用中都发挥着重要作用,如图像分割、目标识别和机器视觉等。
Matlab是一种功能强大且流行的科学计算软件,它提供了许多用于边缘检测和边界提取的工具和函数。
下面将介绍一些常用的Matlab函数和技术,它们在边缘检测与边界提取中的应用。
一、基于梯度的边缘检测梯度是表示图像中变化的指标,边缘通常是图像灰度值变化剧烈的区域。
Matlab中的Sobel、Prewitt和Roberts等函数可以方便地计算图像的梯度,从而实现边缘检测。
例如,使用Sobel算子可以对图像进行边缘检测:```I = imread('image.jpg');gray = rgb2gray(I);sobel_x = edge(gray, 'sobel', 'horizontal');sobel_y = edge(gray, 'sobel', 'vertical');imshowpair(sobel_x, sobel_y, 'montage');```上述代码首先加载并灰度化图像,然后使用Sobel算子分别计算水平和垂直方向上的梯度。
最后,使用imshowpair函数将水平和垂直边缘结果以并排的方式展示出来。
二、基于Canny算法的边缘检测Canny算法是一种广泛应用于边缘检测的算法,它通过多步骤的处理来准确地检测边缘。
在Matlab中,可以使用edge函数以及一些参数来实现Canny算法。
下面是一个使用Canny算法进行边缘检测的示例:```I = imread('image.jpg');gray = rgb2gray(I);canny = edge(gray, 'canny');imshow(canny);```上述代码中,首先加载并灰度化图像,然后使用edge函数采用Canny算法进行边缘检测。
综述边缘检测算法
边缘检测算法是一种常见的图像处理技术,用于检测图像中像素强度变化的区域,即边缘。
边缘是图像中物体与背景、物体与物体之间的边界线,是图像分割、识别、跟踪等后续处理的重要基础。
边缘检测算法的原理是通过分析图像的灰度值或颜色信息,利用图像的一阶或二阶导数等信息,检测出图像中的边缘点。
常用的边缘检测算法包括Canny算法、Roberts算法、Sobel算法、Prewitt算法等。
Canny算法是一种多阶段的边缘检测算法,包括噪声滤波、计算图像梯度、非极大值抑制和双阈值检测等步骤。
该算法能够检测出真正的边缘,并去除假边缘,同时保留边缘的精细部分。
Roberts算法是一种基于一阶导数的边缘检测算法,利用水平和垂直方向上的差分来计算边缘强度和方向。
该算法简单、快速,但容易受到噪声的干扰。
Sobel算法是一种经典的二阶导数边缘检测算法,通过计算图像中每个像素点在x和y 方向上的梯度强度和方向,来判断该像素点是否为边缘点。
该算法对噪声有一定的抑制作用,但计算较为复杂。
Prewitt算法是一种基于一阶导数的边缘检测算法,通过计算水平和垂直方向上的梯度来检测边缘。
该算法简单、快速,但容易受到噪声的干扰。
除了以上几种常见的边缘检测算法外,还有Laplacian算子、Hough变换等算法可用于边缘检测。
这些算法各有优缺点,可以根据实际需求选择合适的算法进行处理。
边缘检测算法

边缘检测算法边缘检测算法是一种重要的图像处理算法,它的目的是检测和跟踪图像中元素的边缘。
这种算法可以应用于多种图像处理任务,如图像分割、轮廓提取、模式识别和智能对象跟踪等。
本文将简要介绍边缘检测算法的基本原理、分类及典型应用。
一、边缘检测算法的基本原理边缘检测算法的原理是检测图像中的暗线和亮线,这些线形成的边缘是图像中最基本的元素。
因此,边缘检测算法是一种通过检测图像中元素的边缘来提取图像特征的算法。
它通过比较图像中相邻像素的灰度值来确定是否存在边缘,并对边缘位置、方向和强度进行测定。
一般来说,边缘检测包括:分析图像中元素的灰度变化;检测边缘的位置和方向;图像细化和凸性检测来确定形状信息。
二、边缘检测算法的分类边缘检测算法可以分为积分或空间域算法和滤波器或频域算法两大类。
积分或空间域算法通过计算图像像素灰度变化,例如梯度、高斯梯度、灰度梯度等等,来检测边缘;滤波器或频域算法则通过运用滤波器,如Sobel、Roberts、Prewitt、Laplacian等,来检测边缘。
三、边缘检测算法的典型应用边缘检测算法可以应用于多种图像处理任务,如图像分割、轮廓提取、模式识别和智能对象跟踪等。
1.像分割。
边缘检测算法可以用来识别图像中不同的部分,从而实现图像分割。
2.廓提取。
边缘检测算法可以用来检测图像中各个对象的轮廓,从而实现轮廓提取。
3.式识别。
边缘检测算法可以用来识别图像中的模式,从而实现模式识别。
4.能对象跟踪。
边缘检测算法可以用来跟踪动态对象,从而实现智能对象跟踪。
综上所述,边缘检测算法是一种重要的图像处理算法,它可以应用于多种图像处理任务,如图像分割、轮廓提取、模式识别和智能对象跟踪等,从而能够提高图像处理的效率。
随着技术的不断发展,边缘检测算法将越来越受欢迎并被广泛应用于各种图像处理任务中。
任意方向的边缘检测算法及在道路半自动提取中的应用

田 田
在实 际一 幅 图像 中 边 缘 线 的方 向 可 能 是 0 ~ 。
半 自动线 特征 提取 系 统 不 仅 仅 是 研究 算 法 , 要 考 还 虑算 法在 系统 中实 现 的效率 。
3 0 的任意 方 向 。我 们或 许 只对 特定 方 向上 的线 感 6。 兴趣 , 如果 能 够根 据边 缘方 向的不 同 , 算 出不 同 的 计 模 板 , 单地 通过 使 用模板 的转换 , 取得感 兴趣 的 简 来
视判 读 , 找到 某一 道路 的起 始种 子 点 , 后 鼠标通 过 然 鼠标 的移 动 , 系统 根 据 鼠标 的 位置 与起 始 种 子 点 确 定 方 向模 板 。然 后对 种子 点和 鼠标 确定 的矩 形 区域 的图像 进行 指定 方 向的边 缘提 取 。从 而检 测 出道路 中心 , 并把 检测 出 的直 线 的最 后 一 点作 为 新 的种 子 点 , 复前 面 的过程 。 重 3 1 1方 向模 板 的确定 。 ..
个难 点 , 是计 算机 视 觉 和 图像 处 理 中基 础 而 又 重 要 的课题 , 边缘 检测 可看 作是 处理 许 多 问题 的关键 。
由人工 干预 或人 工引 导 的半 自动 提取 可 以将人
的模式 识别 能力 和 计 算 机 的快 速 、 确 的计 算 能力 精
有 机 的结合 起来 , 目前 的条 件 下 达 到 较 大地 提高 在 效率 和减 轻劳 动强度 的 目的 。设计 一 个 人机协 同 的
于 边缘 直线 的方 向性 , 缘 在 水 平 和 垂 直 方 向存 在 边
不 同的分量 。根 据边 缘 的方 向 , 置不 同的权值 , 设 就
可 以得 到相 应方 向边 缘 的最 大 响应模 板 。
智能交通系统中的道路边缘检测技术
智能交通系统中的道路边缘检测技术现代社会的交通问题一直是困扰城市发展和人们生活的重要问题之一。
然而,随着科技的快速发展,智能交通系统的出现为解决交通问题带来了新的机遇。
在智能交通系统中,道路边缘检测技术是其中一个不可或缺的技术。
道路边缘检测技术是指利用计算机视觉和图像处理技术,将道路边缘提取出来,达到在车辆行驶时自动识别道路的目的。
一般来说,道路边缘有两种类型,即实线和虚线。
而且,由于道路边缘线在不同天气和光线条件下的表现不同,因此设计一种能够适应多种场景并进行准确检测的道路边缘检测技术是非常难的。
有关研究人员们基于不同的技术方法和算法,将道路边缘检测技术分为多种类型,如基于边缘检测算法、基于模板匹配算法、基于特征提取算法等等。
在这些方法中,基于边缘检测算法是目前被广泛应用的一种方法。
基于边缘检测算法的道路边缘检测技术,是指根据图像中像素亮度变化的快速变化点来检测道路边缘,它利用了像素在亮度变化处产生的边缘特征。
常用的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子。
其中,Canny算子是最常用的算法,因为它在滤除噪声的同时,能够产生清晰、准确的道路边缘线。
道路边缘检测技术在智能交通系统中有着广泛的应用。
道路边缘检测技术可以被自动驾驶车辆用来判断车辆与道路间的距离,从而控制车辆行驶轨迹,确保安全驾驶。
在行车辅助系统中,道路边缘检测技术也可以被应用于内置导航系统,根据车辆位置、行驶方向以及道路位置等信息为驾驶员提供道路边缘线位置的信息。
同时,在智能交通监管中,道路边缘检测技术也可以被用来进行交通违法行为的监督和判断。
然而,在道路边缘检测技术的应用过程中,由于车辆的行驶速度、天气情况、光线等因素的影响,道路边缘线的识别存在一定的误差。
因此,如何应对这些干扰因素,提高道路边缘检测技术的准确性是目前的研究方向。
为了提高道路边缘检测技术的准确性,研究人员们主要采用了以下几种方法。
首先,调整算法的参数。
2019年整理基于MATLAB边缘检测与提取的几种方法的比较精品资料
基于MATLAB边缘检测与提取的几种方法的比较数字图像边缘检测(Digital Image Processing)又称为计算机图像边缘检测,它是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
由于图像边缘是图像最基本的特征之一,往往携带着一幅图像的大部分信息。
而边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置,这些轮廓常常是我们在图像边缘检测时所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
在通常情况下,我们可以将信号中的奇异点和突变点认为是图像中的边缘点,其附近灰度的变化情况可从它相邻像素灰度分布的梯度来反映。
根据这一特点,提出了多种边缘检测算子:如Robert算子、Sobel 算子、Prewitt 算子、Laplacian 算子,Canny算子等。
这些方法多是以待处理像素为中心的邻域作为进行灰度分析的基础,实现对图像边缘的提取并已经取得了较好的处理效果。
经典的边界提取技术大都基于微分运算。
首先通过平滑来滤除图像中的噪声,然后进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最后选取适当的阈值来提取边界。
本文主要介绍几种经典的边缘提取算法,选取两种用MATLAB语言编程实现,对提取结果进行比较和分析。
图像边缘检测的基本步骤:(1)滤波。
边缘检测主要基于导数计算,但受噪声影响。
但滤波器在降低噪声的同时也导致边缘强度的损失。
(2)增强。
增强算法将邻域中灰度有显著变化的点突出显示。
一般通过计算梯度幅值完成。
(3)检测。
但在有些图像中梯度幅值较大的并不是边缘点。
最简单的边缘检测是梯度幅值阈值判定。
(4)定位。
精确确定边缘的位置。
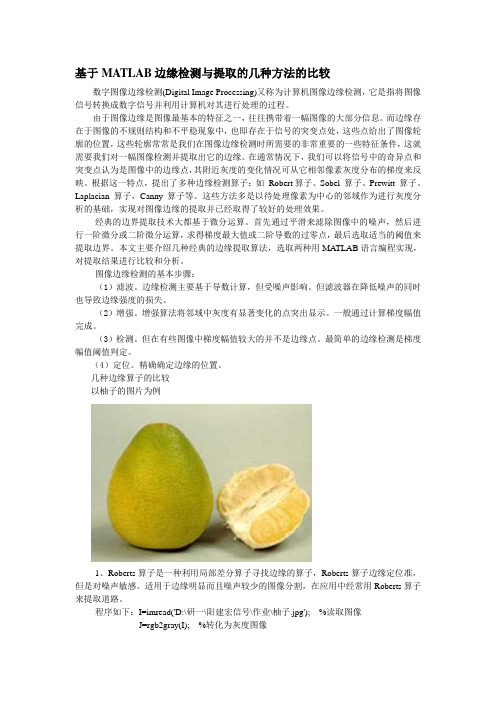
几种边缘算子的比较以柚子的图片为例1、Roberts算子是一种利用局部差分算子寻找边缘的算子,Roberts算子边缘定位准,但是对噪声敏感。
适用于边缘明显而且噪声较少的图像分割,在应用中经常用Roberts算子来提取道路。
自动驾驶汽车的道路边缘检测与跟踪技术研究

自动驾驶汽车的道路边缘检测与跟踪技术研究自动驾驶技术是当前最为火热的科技领域之一,旨在解决日益严重的交通安全和交通拥堵问题。
其中,道路边缘的检测与跟踪技术是实现自动驾驶的核心技术之一。
本文将探讨自动驾驶汽车的道路边缘检测与跟踪技术研究,分析其面临的挑战和未来发展趋势。
一、道路边缘检测技术道路边缘检测是自动驾驶汽车实现自主机动的必要技术,其主要任务是检测车辆所在车道线的位置以及车道边界位置,为自动驾驶提供准确的车道线位置和道路宽度信息。
当前,道路边缘检测技术主要有以下三种方法:1、基于摄像头的视觉检测技术视觉检测技术是道路边缘检测技术的主流方法,依靠摄像头采集路面图像,在图像处理算法的帮助下完成车道线检测和边缘提取。
该技术具有简单易用、精度高等优点,但在夜间或低亮度环境下、路面结构较复杂的情况下,其检测效果会大幅下降。
2、基于激光雷达的激光检测技术激光检测技术是一种高精度的道路边缘检测方法,可以通过激光雷达扫描路面来获取道路边界、障碍物等信息。
该技术在复杂路况下具有稳定的检测效果,但同时也存在部分区域遮挡或信号反射问题,导致检测精度下降。
3、基于GPS和地图的定位检测技术该技术主要通过在导航地图上标识道路边缘和车道线的位置,再通过GPS定位车辆所在位置,从而实现车道线和边缘的检测。
该技术不需要摄像头等硬件设备,具有稳定可靠、准确度高的优点,但受到地图更新及定位误差等因素的限制。
二、道路边缘跟踪技术道路边缘跟踪技术是在车道线和道路边界检测的基础上,实现自动驾驶车辆的路径规划和控制的关键技术。
当前,道路边缘跟踪技术主要有以下两种方法:1、基于模型的控制算法该方法基于矩阵运算理论,将车辆运动状态、车道线参数、车辆控制策略等参数输入到控制模型中,实现车辆运动的精确控制。
该方法的优点是精度高、实时性强,缺点是对模型预测要求高,受路面摩擦力、路面高低起伏、转向系统参数等因素影响较大。
2、基于学习的控制算法该方法主要依靠机器学习技术,从纵向跟随、横向控制、转向等自动驾驶场景中学习相关知识,并通过实时融合当前车辆状态和环境信息,预测车辆的下一步行动。
基于遥感影像的道路边缘提取方法设计

基于遥感影像的道路边缘提取方法设计道路边缘提取在交通管理、地球科学和城市规划等领域中具有重要的应用。
基于遥感影像的道路边缘提取方法设计是通过分析和处理遥感影像来提取道路的边缘信息。
本文将介绍一种基于遥感影像的道路边缘提取方法设计。
首先,我们需要获取高分辨率的遥感影像数据。
可以使用航空影像、卫星影像或无人机影像等不同类型的遥感影像数据。
这些数据可以通过遥感图像采集系统进行获取。
获取到的遥感影像需要经过预处理,包括辐射定标、几何校正和图像增强等步骤,以提高影像质量。
接下来,我们需要选择一种适合的道路边缘提取算法。
常用的道路边缘提取算法包括基于滤波器的方法、基于边缘检测算子的方法和基于机器学习的方法。
根据实际需求,选择一种适合的算法进行道路边缘提取。
在基于滤波器的方法中,可以使用线性和非线性滤波器来增加图像的边缘信息。
常用的滤波器包括Sobel、Prewitt和Canny等。
这些滤波器通过对遥感影像进行滤波操作,提取出边缘信息。
在基于边缘检测算子的方法中,可以使用Sobel、Laplacian和Kirsch等边缘检测算子来提取道路的边缘。
这些算子通过计算遥感影像中像素点的梯度或二阶导数,来检测出边缘位置。
在基于机器学习的方法中,可以使用支持向量机(SVM)、随机森林(Random Forest)和卷积神经网络(Convolutional Neural Network)等算法来进行道路边缘提取。
这些算法通过对已标记好的道路边缘样本进行训练,从而学习到道路边缘的特征,并用于提取新的道路边缘。
在应用选择的算法进行道路边缘提取后,还可以进行后处理操作来进一步优化提取结果。
例如,可以使用形态学处理来填充道路边缘的空洞或去除噪声点。
最后,通过可视化或其他方式展示道路边缘提取的结果。
可以使用GIS软件或图像处理软件来对提取结果进行可视化,并与实际道路进行对比验证。
总之,基于遥感影像的道路边缘提取方法设计是一个复杂的过程,需要综合考虑图像预处理、算法选择、后处理和结果验证等多个方面的问题。
使用边缘检测算法进行图像边缘提取的最佳实践
使用边缘检测算法进行图像边缘提取的最佳实践边缘检测算法是计算机视觉领域中一项重要的图像处理技术,用于提取图像中物体的边缘信息。
通过识别图像中物体的边界,我们可以获得更多关于物体形状、大小和位置的信息。
然而,在实际应用中,选择最佳的边缘检测算法是一个具有挑战性的问题。
本文将介绍几种常见的边缘检测算法,并探讨它们在不同应用场景下的最佳实践。
一、Sobel算子Sobel算子是一种广泛应用于图像处理的边缘检测算法,它基于图像亮度的一阶导数。
该算法通过将图像与一个水平和一个垂直的3x3卷积核进行卷积运算,得到了图像在水平和垂直方向上的亮度梯度值。
最后,我们可以计算亮度梯度的幅度,从而得到图像的边缘信息。
Sobel算子的优点是简单且计算速度快,适用于噪声较少的图像。
然而,Sobel算子在图像边缘存在细节和噪声较多的情况下可能会产生较多的误检测和漏检测。
为了解决这个问题,我们可以将Sobel算子与其他滤波器结合使用,如高斯滤波器,以平滑图像并去除噪声。
此外,设定适当的阈值来过滤掉低于一定梯度值的边缘信息也是个不错的实践。
二、Canny边缘检测Canny边缘检测算法是一种基于多阶段处理的边缘检测方法,被广泛认为是最佳实践之一。
该算法首先使用高斯滤波器对图像进行平滑操作,以降低噪声的影响。
然后,计算图像的梯度,找到梯度的幅度和方向。
接下来,通过非极大值抑制算法,提取出图像中的细线条,并消除可能是噪声的边缘。
最后,通过高低阈值追踪,将边缘进一步细化和连接。
相比于其他边缘检测算法,Canny算法具有较高的准确性和较低的误检率。
它在噪声较多的图像中表现出色,并能提取出较细的边缘线条。
此外,Canny算法还能够应用于边缘跟踪、形状识别和目标检测等领域。
三、Laplacian算子Laplacian算子是一种基于图像亮度的二阶导数的边缘检测算法。
它可以通过二阶偏导数的模拟形式,快速检测出图像中的边缘。
Laplacian算子的优点是对于边缘的高频细节信息敏感,能够提取出非常细的边缘。
基于Canny边缘检测和聚合接续法的路轨边缘提取方法

Ra l f a e r s r c i n Ba e n Ca ny Edg i— r m wo k Ab t a to s d o n e
第3 4卷 第 2期
20 1 2年 2 月
铁
道
学
报
V o1 CHI NA RAI LW AY 0CI S ETY
Fe r a y 2 2 b u r 01
文 章 编 号 : 0 18 6 ( 0 2 0 — 0 20 1 0 — 3 0 2 1 ) 20 5 — 6
o he k y t c que ft e e hni s,whih s s d o c n im t e va i d t c i r n nd l r c i u e t o fr h ld e e ton a ge a a a m t e x s e c bs a h e it n e of o t — ce . ls The m e ho f r i f a wo k a s r c i n b s d o he Ca t d o a l r me r b t a to a e n t nny e ge d t c i n a o y c nn c e t d — d e e to nd p l — o e t d me ho wa o htf r r n t s p pe .By hit gr m q l a i s br ug o wa d i hi a r s o a e ua i ton,t rgi a ma s e a e o s r s o e z he o i n li ge wa nh nc d t t e s s m de a l t is,a he i ge Se ge o s a s r c e hr ug n dg e e to .Ne t he t on s i s nd t ma ’ d sgr up wa b t a t d t o h Ca ny e e d t c i n x ,t WO l ge tlne we e go t n n l — on c e r r t e a d po y c ne t d f om he e e r p,whih s a o h a lf a e t dg s g ou c t nd f r t e r i r m wor her l s b oug — k by t u e r ht f wa d 1 t ri hi p r Thi rt or r a e n t s pa e . s a ihm e i S r a ie b A TLAB, n e t d i he TI tc i e lz d v M a d t s e n t DM 6 2 i o De — 4 v de v
基于遥感影像的道路边缘提取方法设计

基于遥感影像的道路边缘提取方法设计作者:刘春江来源:《科技视界》 2015年第28期刘春江(呼和浩特市第二中学,内蒙古呼和浩特 010010)【摘要】从遥感影像中提取道路信息一直是遥感影像数据应用研究的一个重点和难点。
文中采用将阈值分割和Canny边缘检测算子相结合的方法对遥感影像中道路的边缘信息进行提取。
首先采用灰度直方图阈值分割的方法分割遥感影像,得到初始道路信息;其次进行面积阈值滤波处理滤除干扰信息;再次采用Canny算子检测道路的边缘信息;最后将得到的道路边缘叠加到原图像中显示。
【关键词】道路边缘提取;阈值分割;面积滤波;Canny边缘检测算子Method Design of Extract Road Edge Based on Remote Sensing ImageLIU Chun-jiang(Hohhot No.2 High School, Hohhot Inner Mongolia 010010, China)【Abstract】Extract road information from remote sensing image is always one important and difficult point of remote sensing data implication researching. In this paper, combine threshold segmentation with Canny edge detector operator to extract road edge information in remote sensing image. Firstly, use gray level histogram threshold segmentation to segment the remote sensing image, and obtain the initial road information. Secondly, use area threshold filtering to filter interference information. Thirdly, use Canny operator to detect road edge information. At last, overlay the obtained edge with the original image to show.【Key words】Road edge extraction; Threshold segmentation; Area filtering; Canny edge detector operator0 引言随着航空航天和电子科技等水平的发展,获取遥感影像数据的方式变得多样化,获得数据变得越来越容易,同时影像的分辨率也越来越高,影像中的地物信息也越来越丰富,因此对于遥感影像数据的应用研究也越来越多。
基于双重曲率的道路边缘提取算法研究

基于双重曲率的道路边缘提取算法研究随着计算机技术的不断进步,人们对于图像处理算法的研究越来越深入,图像边缘提取作为计算机视觉中的一个重要领域,其在目标检测、图像分割等方面都有着重要的应用。
而针对道路场景下的边缘提取问题,基于双重曲率的道路边缘提取算法成为了近年来研究的热点。
一、双重曲率的概念及其应用双重曲率,是指曲线的一种变化率,一般用于表征曲线的弯曲度。
在图像处理中,双重曲率广泛应用于边缘检测和形状分析中。
当曲线变化越快时,其双重曲率就越大;反之,曲线变化越缓慢时,其双重曲率就越小。
在道路场景下,基于双重曲率的边缘提取算法将道路边缘视为整个场景的较重要的特征之一,通过双重曲率的计算,可以有效识别出道路边缘,从而实现对于道路的分割、识别等任务。
二、基于双重曲率的道路边缘提取算法原理基于双重曲率的道路边缘提取算法,主要通过对于道路表面的弯曲程度进行测量,来提取出道路场景下的边缘。
一般而言,其流程可以分为以下几步:1. 对于道路场景图像进行预处理,例如调整亮度、色彩平衡等。
2. 对于预处理后的图像进行梯度计算,计算每个像素点的梯度幅度和方向,通常采用Sobel算子、Prewitt算子等。
3. 通过双重曲率计算法,计算出图像中每个像素点的双重曲率值,并将其映射到相应的图像位置上。
4. 基于阈值法或者二值化算法,对于映射后的双重曲率图像进行二值化操作,从而得到道路边缘的二值化图像。
5. 对于得到的边缘图像进行后处理,例如边缘连接、噪声滤除等,进一步提高边缘检测的精度和鲁棒性。
三、基于双重曲率的道路边缘提取算法的优缺点基于双重曲率的道路边缘提取算法具有以下几点优势:1. 对于道路场景的复杂度和多样性具有较好的适应性,可以有效地检测出各种道路边缘。
2. 在处理复杂的道路场景时,其鲁棒性和准确性优于传统的边缘提取算法。
3. 算法的计算量相对较小,可以实现实时性检测。
但同时也存在以下缺点:1. 虽然算法具有优良的适应性,但比较依赖于图像的前处理,处理的效果会直接影响后续边缘检测的结果。
matlab道路提取

matlab道路提取这段文本是关于使用MATLAB(Matrix Laboratory)进行道路提取的。
在计算机视觉和图像处理领域,道路提取是一个重要的任务,通常用于自动驾驶、交通监控和地图制作等应用。
MATLAB 是一种流行的编程语言和环境,广泛用于算法开发、数据可视化、数值计算和数据分析。
在道路提取方面,MATLAB 提供了许多工具和函数,可以帮助研究人员和工程师进行图像处理和分析,以自动识别和提取道路的轮廓。
下面是一些常见的 MATLAB 道路提取方法:1.基于边缘检测的方法:利用边缘检测算法(如 Canny 边缘检测器)来识别图像中的道路边缘,然后通过连接边缘像素来形成道路的轮廓。
2.基于滤波器的方法:利用滤波器(如Sobel 滤波器)来增强图像中的道路区域,然后通过阈值处理和形态学操作来提取道路轮廓。
3.基于机器学习的方法:利用训练好的机器学习模型(如支持向量机、神经网络等)来进行道路检测和提取。
这种方法通常需要大量的标注数据进行训练。
4.基于高程地图的方法:利用高程地图和遥感数据,通过分析地形起伏和高度变化来识别道路位置。
这种方法需要结合地理信息系统(GIS)数据和相应的算法。
需要注意的是,不同的方法适用于不同的场景和数据条件,可能需要根据具体需求选择合适的方法。
同时,MATLAB 也提供了丰富的函数库和工具箱,可以帮助用户快速实现各种图像处理和分析功能。
最后总结,MATLAB 提供了多种方法和工具用于进行道路提取,这些方法包括基于边缘检测、滤波器、机器学习和高程地图的技术。
用户可以根据具体需求选择合适的方法,并利用 MATLAB 的函数库和工具箱进行实现。
基于遥感影像的道路边缘提取方法设计

基于遥感影像的道路边缘提取方法设计遥感影像道路边缘提取方法是地理信息系统和计算机视觉领域中的一个重要问题。
道路边缘提取方法可以应用于交通规划、智能驾驶、城市规划等领域。
在这篇文章中,我们将介绍一种基于遥感影像的道路边缘提取方法设计。
首先,我们需要获取高分辨率的遥感影像数据。
可以使用卫星图像、无人机图像或者航空影像等不同的遥感数据源。
这些数据应当包含大量的道路图像,以便我们能够从中提取道路边缘信息。
接下来,图像预处理是道路边缘提取的重要步骤。
主要包括去噪、灰度化、图像增强等操作。
去噪操作可以通过应用高斯滤波器或者中值滤波器来实现。
灰度化操作将彩色图像转换为灰度图像,简化了后续算法的计算复杂度。
图像增强可以通过直方图均衡化或者对比度增强等方法来增强图像的可见性。
在预处理之后,我们可以使用边缘检测算法来提取道路边缘。
常用的边缘检测算法有Canny算法、Sobel算法和Laplacian算法等。
这些算法可以通过对图像梯度或者二阶导数进行计算,来检测出像素值发生剧烈变化的位置,从而找到道路的边缘。
然而,传统的边缘检测算法通常会受到光照、噪声等因素的干扰,容易产生边缘断裂、无关边缘等问题。
因此,我们可以结合机器学习算法来提高道路边缘的准确性和稳定性。
可以训练一个基于深度学习的神经网络模型,使用标注好的道路边缘数据来进行模型训练,并通过该模型来对未知图像进行道路边缘的推断。
常用的深度学习模型有卷积神经网络(CNN)、循环神经网络(RNN)等。
另外,为了提高道路边缘提取的效果,我们还可以加入其他信息来辅助边缘提取,例如地理信息、交通标志等。
通过将这些信息与遥感影像数据进行融合,可以提高道路边缘的定位和精度。
最后,在道路边缘提取完成之后,我们还需要进行边缘的后处理。
常用的后处理方法有边缘连接、边缘平滑等。
边缘连接可以将离散的边缘点连接成边缘线,边缘平滑可以通过滤波或者插值等方法来去除不连续性和噪声。
总结起来,基于遥感影像的道路边缘提取方法设计主要包括图像预处理、边缘检测、机器学习算法、辅助信息融合和后处理等步骤。
了解计算机视觉技术中的边缘检测算法

了解计算机视觉技术中的边缘检测算法计算机视觉技术是指计算机利用摄像机或传感器获取的图像数据进行分析和处理的技术。
而边缘检测算法是计算机视觉中的一种基础算法,用于在图像中寻找并提取物体的边缘信息。
本文将详细介绍计算机视觉技术中的边缘检测算法,包括其原理、应用和常见算法。
边缘是图像中物体之间或物体与背景之间的边界,边缘检测算法旨在准确地识别和提取出这些边界信息。
边缘检测在计算机视觉和图像处理领域具有广泛的应用,如目标识别、边缘增强、图像分割等。
边缘检测算法的原理是基于图像灰度的变化或梯度信息来确定边缘的位置。
这些算法通常使用一系列的滤波器或运算符来计算图像中像素的灰度变化,并根据这些变化判断边缘是否存在。
常见的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子。
Sobel算子是最早也是最常用的边缘检测算法之一。
它使用两个3×3的滤波器分别计算图像中每个像素点的水平和垂直梯度,然后将两个梯度的绝对值相加得到像素点的边缘梯度。
Sobel算子的优点是简单快速,但其提取的边缘有时会比较粗糙。
Prewitt算子也是一种常见的边缘检测算法,与Sobel算子类似,它也使用两个3×3的滤波器计算像素点的水平和垂直梯度。
与Sobel算子不同的是,Prewitt算子的滤波器权重设置相对均匀,使得提取的边缘比较平滑。
然而,Prewitt算子的边缘检测能力不如Sobel算子。
Canny算子是一种较为复杂和准确的边缘检测算法。
相比于Sobel和Prewitt算子,Canny算子不仅计算像素点的梯度,还利用非极大值抑制和双阈值处理来优化边缘检测结果。
首先,Canny算子通过计算像素点的梯度和方向,找出图像中的局部最大值,从而保留边缘的细节信息。
然后,利用双阈值处理来过滤出真正的边缘,提高算法对噪声的鲁棒性。
除了上述常见的边缘检测算法,还有一些其他算法也被广泛应用于计算机视觉领域。
例如,拉普拉斯算子(Laplacian)是一种基于二阶导数的边缘检测算法,可以更好地定位边缘的位置。
一种智能汽车的实时道路边缘检测算法

一种智能汽车的实时道路边缘检测算法朱学葵;高美娟;李尚年【摘要】Pointing to road boundary detection problem of driverless cars in structured and semi-structured road, the paper proposed a new real-time road boundary detection algorithm based on driverless cars as a platform. The algorithm firstly includes the following steps:calibration, layering and median filtering will be made according to the obtained lidar point cloud data. And then the left and right road boundary point of each layer will be extracted. The extracted road boundary points are then straight line fitted using Ransac algorithm. Finally, straight line is tracked using Kalman filtering, thus the real-time road boundary detection is achieved. The test results show that this boundary detection algorithm is with high accuracy and reliability and is able to accurately accomplish the boundary detection task, which can satisfy the requirements of real-time system. And this algorithm has been applied successfully in "The Future Challenge Competition for Driverless Cars" 2014 and obtained the third place.%以无人驾驶汽车为平台,针对结构化、半结构化道路下无人驾驶汽车道路边缘检测问题,提出了一种智能汽车的实时道路边缘检测算法. 该算法首先对获取的激光雷达数据点云进行标定、分层与中值滤波,然后提取各层的左右边界点,而后利用随机抽样一致性算法(简称Ransac)对左右边界点集进行直线拟合,最后用卡尔曼滤波算法进行跟踪,从而实现实时的道路边缘检测. 经实验验证,该算法准确率高,可靠性强,能够准确完成道路边缘检测,可以满足实时系统的要求,并已经成功应用于2014年的"智能汽车未来挑战赛",而且取得了第三名的好成绩.【期刊名称】《北京联合大学学报(自然科学版)》【年(卷),期】2015(029)004【总页数】7页(P1-7)【关键词】无人驾驶汽车;激光雷达;Ransac;卡尔曼滤波;道路边缘检测【作者】朱学葵;高美娟;李尚年【作者单位】北京联合大学北京市信息服务工程重点实验室,北京 100101;北京联合大学北京市信息服务工程重点实验室,北京 100101;北京联合大学北京市信息服务工程重点实验室,北京 100101【正文语种】中文【中图分类】U469.79自智能机器人诞生以来,关于无人驾驶汽车方面的研究越来越火热化。
道路标识线边缘检测的研究

道路标识线边缘检测的研究摘要基于机器视觉的智能汽车技术正在迅速发展并为驾驶员带来了极大便利。
该技术中一个重要环节是道路标识线检测,本文主要对此进行了研究。
首先分析了道路标识的特点,依据道路标识特征采用了中值滤波除去图像中噪声,采用环境光线设置阈值增强图像,然后分析了边缘检测算法,采用Sobel结合Hough变换的方法对图像边缘进行了提取,并达到了预期效果。
关键词中值滤波;Sobel算子;Hough变换汽车是现代生活中重要交通工具,给人们的生活带来了极大的舒适、快捷、方便。
智能汽车是应用自动控制、通讯和计算机等信息技术,诸如汽车防撞装置、自动驾驶等主动式汽车辅助安全装置,以及减少驾驶员的负担等措施的智能汽车正迅速发展起来。
开发智能汽车可以有效利用现存的道路设施,使得车辆、道路和驾驶者和谐的统一起来,具有极大的现实意义和广阔的应用前景。
在基于图像处理的智能车中,边缘检测是一个非常重要的环节,本文主要研究道路标识的边缘检测算法。
1 总体设计首先,我们对常见道路标识进行分析,它具有如下特点:道路标识灰度值高、道路灰度值低,图像对比度较高;图像中各处道路标识的宽度基本一致,水平方向位置变化比较缓;道路标志线之间的宽度也基本一致,保持一种平行关系。
通过分析这3个特点,我们可以发现,在道路标识识别中,对于硬件要求不需要太高,能够掌握通过分析这3个特点,我们可以发现,在道路标识识别中,对于硬件要求不需要太高,能够掌握主要边缘细节皆可,对于图像处理算法也是如此,增强图像边缘,忽略尽可能多的无关细节。
该系统边缘检测流程图如图1所示。
2 边缘检测2.1 图像采集图像传感器采用OV7670,输出格式采用8位数字输出,视场角为67度。
摄像头采集到的原始图像如图2所示,图像中有较明显的噪声。
2.2 滤波除噪由摄像头采集到的图像中含有较多噪声,以及摄像头镜头污浊的痕迹,但这些噪声与道路标识图像元素结构差异较大,还是很容易采用一般除噪方法还原出一幅清晰便于后续图像分析的图像。
基于单目视觉的车道边缘检测及中心线提取算法研究

基于单目视觉的车道边缘检测及中心线提取算法研究10.16638/ki.1671-7988.2019.01.015基于单目视觉的车道边缘检测及中心线提取算法研究孙悦(长安大学汽车学院,陕西西安710064)摘要:车道线检测是无人车环境感知模块的重要组成部分。
为实现对智能小车循迹过程中的精准控制,文章提出了一种新的车道中心线的提取算法。
首先对图像进行处理,根据光照条件不同进行分类,之后用霍夫变换特征提取方法来检测车道线;根据图像中车道线的几何关系以非拟合的方式得到正确的车道中心线。
所提出的方法在规定地图中可以完成完整的车道保持,尤其在弯道中保持良好。
实践证明,该智能小车的车道中心线提取准确、稳定、计算速度快。
关键词:图像处理;智能小车;霍夫变换;车道中心线中图分类号:U461.4 文献标识码:A 文章编号:1671-7988(2019)01-47-03The overall design of medium-sized trucks based on Python Sun Yue( Chang'an University, Shanxi Xi'an 710064 )Abstract:Lane line detection is an important part of the unmanned vehicle environment awareness module. In order to achieve precise control of the tracking process, this paper proposes a new lane center line extraction algorithm. Firstly, the image is processed, classified according to different lighting conditions, and then the Hough transform feature extraction method is used to detect the lane line; the correct lane center line is obtained in a non-fitting manner according to the geome -tric relationship of the lane lines in the image. The proposed methodcan complete a complete lane keeping in a prescribed map, especially in a corner. Practice has proved that the lane center line of the smart car is accurate, stable and fast. Keywords: Image Processing; Smart car; Hough transform; Lane centerline CLC NO.: U461.4 Document Code: A Article ID: 1671-7988(2019)01-47-03前言近些年,随着雷达、摄像头、传感器的升级换代,各种智能驾驶辅助技术成了汽车行业前瞻研究的热点课题:自动跟车、车道保持、自动泊车等,但智能驾驶算法实车验证成本大,硬件设备复杂,企业前瞻研究和高校科研都基于单片机或树莓派的智能小车进行方法验证。
车道线边缘提取

车道线边缘提取
车道线边缘提取是计算机视觉领域中的一项重要任务,其主要目的是从道路图像中提取车道线的位置和形状,从而为自动驾驶和道路交通管理等领域提供基础技术支持。
在车道线边缘提取任务中,最常用的方法是基于图像处理和计算机视觉技术的算法。
这些算法的基本思路是,通过对道路图像进行预处理和分析,提取出车道线的特征信息,然后利用这些信息进行车道线的检测和跟踪。
其中,图像预处理是车道线边缘提取任务中非常重要的一步。
在图像预处理阶段,需要对道路图像进行灰度化、滤波、边缘检测等操作,以去除噪声和增强车道线的特征信息。
常用的图像处理方法包括Canny边缘检测、Sobel算子、高斯滤波等。
在图像预处理完成后,就可以进行车道线的检测和跟踪了。
常用的车道线检测算法包括基于霍夫变换的算法、基于模板匹配的算法、基于特征点的算法等。
这些算法都有其优缺点,需要根据实际应用场景进行选择。
除了图像处理和车道线检测算法外,还有一些其他的技术可以用于车道线边缘提取任务。
例如,深度学习技术可以通过对大量的道路图像进行训练,实现更准确和鲁棒的车道线检测和跟踪。
同时,激光雷达和摄像头等传感器也可以用于车道线边缘提取,提高车道线
检测的精度和可靠性。
车道线边缘提取是计算机视觉领域中一个非常重要的任务,其应用范围广泛,包括自动驾驶、交通管理、车辆安全等方面。
在未来,随着计算机视觉和深度学习技术的不断发展,车道线边缘提取技术也将不断得到提升和完善,为我们的生活和出行带来更多的便利和安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 116
•
本文基于微缩无人驾驶汽车的控制平台,通过单片机MK60DN512ZVLQ10的DMA 通道,采用OV7725摄像头作为视觉传感器,通过双缓冲的采集方式,利用边缘检测算法完成对道路边缘的提取,从而实现无人驾驶汽车自主循迹的过程。
1.引言
随着科学技术的发展,汽车已成为生活中必不可少的交通工具。
为此国内外科研人员以及各大高校开始以提高汽车的安全性、舒适性、稳定性等性能为目的,减少环境污染,交通事故等不利影响带来的财产损失为研究目标,对无人驾驶汽车进行研发。
无人驾驶汽车主要是通过车载传感器,检测周边的环境,提取道路信息,然后规划路径,控制电机转速,完成无人驾驶汽车自主循迹(曹煜晖,黄成,李鹏,张磊,晏涛.基于K60智能车的最优路径拟合及控制方法:机械工程与自动化,2018(06):153-154+156)的过程,实现安全、可靠的高速运行。
本文基于微缩无人驾驶汽车的系统平台,以MK60单片机为控制单元,以OV7725摄像头为视觉传感器,通过DMA 通道,采用双缓冲的采集方式,利用边缘检测算法提取道路边缘,完成无人驾驶汽车的道路信息的监测,从而实现微缩无人驾驶汽车的循迹过程,为后期无人驾驶汽车的高速运行打下基础。
2.系统软件设计原理
2.1 DMA原理
DMA (Direct Memory Access ,直接存储器访问)(汤达成,项华珍,刘海刚,唐伟轩,王贤豪.基于
贵阳学院电子与通信工程学院 古 训 陈 红
边缘检测算法提取道路边缘的设计与实
现
图1 图像采集流程图
DMA 的图像采集与路径识别算法研究:实验室科学,2015,18(05):105-108),指外部设备能够不通过CPU 而直接与系统内存交换数据的接口技术。
DMA 传输数据主要是将地址1的数据“搬移”到地址2的位
• 117
•
置,即将数据的地址空间复制到另一个地址空间,以此完成大量数据的“搬移”。
DMA的优势在于它在传输数据时不需要CPU控制传输,如此我们在使用DMA采集图像(乔亮,王建军.基于DMA技术单片机数字摄像头图像采集系统设计:机械与电子,2015(09):40-43)(葛俊杰,何志琴,吴逊.智能车图像采集及优化处理的研究:电子世界,2018(16):55+57)时,CPU可以处理其他“事务”,从而不占用CPU,释放CPU资源,大大提高控制系统的工作效率。
2.2 边缘检测算法
目前,边缘检测(李强.无人驾驶车辆的行道线检测方法研究:南京理工大学,2017)是图像处理和计算机视觉的一个重要研究领域,尤其适用于特征检测的领域。
采用边缘检测方法可以大幅度减少数据量,排除不相关的数据,保留其有必要的数据,从而减少数据量的处理,大大提高CPU的工作效率以及缩短程序的运行时长。
3.系统软件设计
3.1 图像采集
本文利用OV7725摄像头采集图像(郭慧敏,孙雪梅,于千千.智能车图像处理算法的设计:工业控制计算机,2016,29(07):119+141),OV7725摄像头相对于普通黑白摄像头具有信噪比更高,速度更快,稳定性更好,微光灵敏度更高等优势,OV7725摄像头是硬件二值化摄像头,可直接输出二值化图像,可以一次传输8个像素,相对于简单的黑白摄像头一次传输一个像素,就快了8倍。
一般情况,采集完一幅图像,CPU需要处理数据,再采集下一副图像。
但是,由于摄像头的数据是连续传输的,所以在处理数据的时候,图像采集就会被迫停止,而在采集图像的时候,CPU也会停止处理图像,等待采集完成。
这样,CPU就会闲置下来,等待图像采集完成。
所以,本次设计利用双缓冲采集,减少CPU的等待时间,达到双倍采样频率的效果。
双缓冲采集就是采集完一副图像之后,将采集地址切换到下一个地址,继续采集。
这样就可以实现在采集阶段,CPU可以继续处理,而不需要等待采集完成,从而更好的提高CPU的工作效率。
图像采集流程图如图1所示。
3.2 图像处理
本文将摄像头采集到的一幅图像解压到160*60的数组,再根据图像的特征提取道路边缘,对其路径进行识别判断,从而完成循迹过程。
图像处理流程图如图2所示。
3.3 提取赛道边线
本文采取两种方式提取道路边缘(张振,赵玫,孔祥领,王立乾,殷培旭,杨洪勇.基于路径识别自循迹智能车的设计:鲁东大学学报(自然科学版),2017,33(01):36-40.),如图3所示。
首先从图像的最近端开始提取道路边缘,采取从道路的中间开始往两边提取边线,下一次则以上一幅图像的中线(中线=(左边缘+右边缘)/2)为起点开始往左右两边提取左右边线,从中线往左边查取“白黑”的跳变点作为左边线,如果查到左边的尽头都没有查到跳变点,则默认左边丢线,认为左边线为0。
从中间往右查取“白黑”的跳变点作为右边线,如果查到右边的尽头都没有查到跳变点,则默认右边丢线,认为右边线为160。
图像近端提取赛道边线的流程图如图4
所示。
图2 图像处理流程图
图3 近端搜线图
图4 近端边线提取流程图
当近端边线提取完毕后,采取沿左右边线向上提取边线,每次提取边线都以上一行的左右边线为基准,将上一行的边线往中间移动一
(下转第120页)
• 120
•
图6 综合本地控制接口电路图
4.4 互锁解除接口电路
互锁解除(门旁路)信息是一个由屏蔽门系统提供的安全输入。
如图5所示,屏蔽门系统通过闭合互锁解除开关的一对触点,接通门旁路继电器(MPLJ )的励磁电路。
当MPLJ 励磁后,它闭合的触点则接通了联锁系统的输入电路,然后联锁系统采集该继电器的状态信息,并传送给RATP 系统。
同时,车站门控系统中的PLC 也会采集MPLJ 的状态信息,并通过它传送至RATO 系统。
需要注意的是,当屏蔽门处于互锁解除状态时,信号系统不再采集屏蔽门的状态,即信号的开放与否跟屏蔽门无关。
4.5 综合本地控制接口电路
如图6所示,当屏蔽门处于“综合本地模式”时,屏蔽门不再执行信号系统发送的开/关命令,由人工控制屏蔽门开关,但屏蔽门仍向信号系统发送屏蔽门的状态信息。
若信号系统未收到屏蔽门
发送的“门关闭且锁紧”表示,则不允许列车进站或离站。
在“综合本地控制模式”下,操作人员可以通过车站控制室的IBP 盘或站台的PSL 控制屏蔽门开/关,车站控制室的IBP 盘优先于站台PSL 控制。
(肖振鸿.广州地铁3号线及北延线信号与屏蔽门接口系统原理探讨:信息
通信,2018(4):100-102)(天津地铁3号线工
程施工图设计.09-123-0-CJ:北京全路通信信号研究设计院,2010)
5.结束语
本文对天津地铁2、3号线信号系统与屏蔽门的接口设计原则、接口功能以及接口电路进行了分析与探讨。
信号系统和屏蔽门联动控制是地铁工程设计的重要组成部分。
信号系统与屏蔽门之间自动化接口的设置节约了大量人力和物力,不仅起到了安全舒适的作用,同时也达到了节能环保的效果,对实现地铁的安全、快捷和高效运营具有非常重要的作用。
作者简介:曾松林(1988—),男,硕士研究生,工程师,研究方向:城市轨道交通信号,智能交通系统。
(上接第117页)
定的点,再采取上述的方式,往两边查找跳变点,当在一定范围内没有查到跳变点时,就默认为丢线。
根据道路的连续性,丢线达到一定的阈值时,就停止检测边线,认为其道路不连续。
结合上下两种方式就可以完成对道路边缘的检测过程。
边缘检测方式如图5
所示。
图5 边缘检测方式4.结束语
本文主要利用MK60的DMA 通道,采用双缓冲采集的方式,通过OV7725摄像头作为视觉传感器,对模拟道路进行边线提取,完成对道路边缘检测的过程,为后续无人驾驶汽车在道路上行驶打下基础,从而完成无人驾驶汽车的循迹过程。
模拟道路如图6
所示。
图6 模拟道路
作者简介:
陈红【通讯作者】(1995—),女,汉族,贵州威宁人,大学本科,现就读于贵阳学院,专业方向:电子信息科学与技术。
古训(1988—),男,汉族,河南开封人,硕士,贵阳学院讲师,主要研究方向:无人直升机实时控制系统研究。