机械产品常用指令
第二节 数控车床常用的各种指令

第二节 常用的各种指令1.快速点定位指令(G00)该指令使刀架以机床厂设定的最快速度按点位控制方式从刀架当前点快速移动至目标点。
该指令没有运动轨迹的要求,也不需规定进给速度。
指令格式:G00 X____Z____,或G00 U____W____2.直线插补指令(G01)该指令用于使刀架以给定的进给速度从当前点直线或斜线移动至目标点,即可使刀架沿X轴方向或Z轴方向作直线运动,也可以两轴联动方式在X、Z轴内作任意斜率的直线运动。
指令格式:G01 X___Z___F___,或G01 U___ W___F___ 如进给速度F值已在前段程序中给定且不需改变,本段程序也可不写出;若某一轴没有进给,则指令中可省略该轴指令。
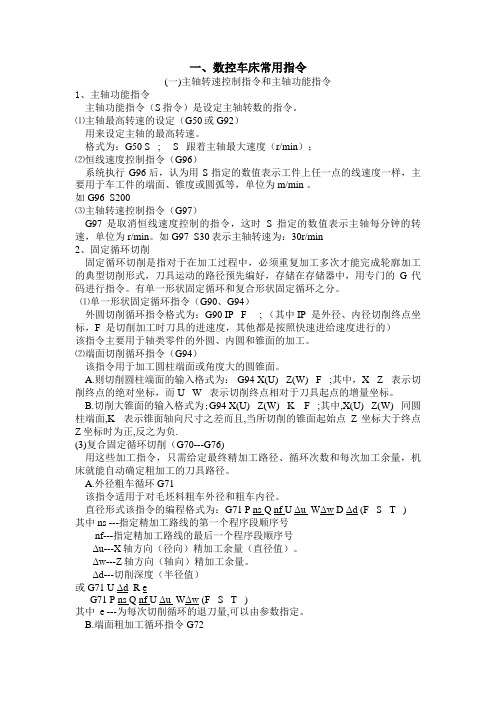
例:如图2.1所示C50起刀点B A 退刀方向快速定位G00直线插补G01指令终止点图2.1% 程序头符号 O0001程序名N10 G50 S1000; 最高限速10000转N12 G00 S500 T0101; 设定转速500 换刀01 刀补01 N14 M03; 主轴正转 N16 M08;切削液开 N18 G00 X120.000 Z40.000 ; 快速定位到A 点N20 G00 Z1.5 ; 定位到 起刀点B 点 N22 G00 X62.000 ; N24 G00 X1.5 ;N26 G00 X0.000 Z1.000 ; N27 G01 Z0. F0.25 直线插补G01 N30 G01 X52.000 F0.250 ; N32 G01 Z-80.000 ; 直线插补 C 点 N34 G00 X62.000 ; 退刀 N36 G00 X120.000 ; N38 G00 Z40.000 ; N39 G28 U0 W0; 返回参考点N40 M1 M09; 程序停止 切削液关 N42 M30; 程序结束 返回程序头 %3.圆弧插补指令(G02、G03)该指令用于刀架作圆弧运动以切出圆弧轮廓。
abb机器人常用指令详解

abb机器人常用指令详解本文主要是关于abb机器人的相关介绍,并着重对abb机器人常用指令进行了详尽的阐述。
abb机器人常用指令详解MoveExtJ:移动一个或者多个没有TCP的机械单元MoveExtJ jpos10,vrot10,z50;意思是移动旋转外部轴到关节位置jpos10,速度10°/秒,zone数据z50.MoveExtJ\Conc,jpos20,vrot10\T:=5,fine\InPos:=inpos20;意思是5秒钟外部轴移动到关节位置jpos20.程序立即向前执行,但是外部轴停止在位置jpos20,直到inpos20的收敛性标准满足。
如上图所示:MoveLp1,v200,z10,tool1\Wobj:wobj1;机器人的TCP从当前位置向p1点以线性运动方式前进,速度是200mm/s,转弯区数据是10mm,距离p1点还有10mm 的时候开始转弯,使用的工具数据是tool1,工件坐标数据是wobj1.MoveL p2,v100,fine,tool1\Wobj:=wobj1;机器人的TCP从p1点向p2点以线性运动方式前进,前进速度是100mm/s,转弯区数据是fine,机器人在p2点稍作停顿,使用的工具数据是tool1,工件坐标数据是wobj1.MoveJ p3,v500,fine,tool1\Wobj:=wobj1;机器人的TCP从p2向p3点以关节运动方式前进,速度是500mm/s,转弯区数据是fine,机器人在p3点停止,使用的工具数据是tool1,工件坐标数据是wobj1.关于速度:速度一般最高只有v5000;在手动限速状态下,所有的运动速度被限速在250mm/s。
关于转弯区:fine指机器人TCP到达目标点,在目标点速度降为零,机器人动作有所停顿后再向下一目标点运动,如果是一段路径的最后一个点一定要为fine;转弯区数值越大,机器人的动作路径就越圆滑和流畅。
川崎机器人常用指令表

川崎常用指令表川崎常用指令表一、基本指令1、START:启动的运行。
2、STOP:停止的运行。
3、RESET:重置的状态。
4、PAUSE:暂停的运行。
5、RESUME:恢复的运行。
二、坐标系设置1、BASE:设置的基坐标系。
2、TOOL:设置的工具坐标系。
3、USER:设置的用户坐标系。
三、运动指令1、MOVJ:关节运动指令,以关节角度为运动参数。
2、MOVL:直线运动指令,以目标位置坐标为运动参数。
3、MOVC:圆弧运动指令,以目标位置坐标和插补半径为运动参数。
4、MOVT:工具坐标系下的运动指令,以工具坐标系的目标位置坐标为运动参数。
5、MOVLINC:增量直线运动指令,以增量位置坐标为运动参数。
6、MOVCINC:增量圆弧运动指令,以增量位置坐标和插补半径为运动参数。
7、MOVTINC:工具坐标系下的增量运动指令,以增量位置坐标为运动参数。
四、速度控制指令1、SPEED:设置的运动速度。
2、ACCEL:设置的加速度。
3、DECEL:设置的减速度。
五、力控制指令1、FORCE:设置的力控制模式及参数。
2、NOFORCE:取消的力控制模式。
六、输入输出指令1、DI:读取数字输入信号的状态。
2、DO:控制数字输出信号的状态。
3、:读取模拟输入信号的数值。
4、AO:控制模拟输出信号的数值。
七、数据传输指令1、WT:等待指定条件满足。
2、SIGNAL:发送信号。
3、RECEIVE:接收信号。
八、其他指令1、MESSAGE:显示提示信息。
2、CALL:调用子程序。
3、RET:返回主程序。
4、COMMENT:添加注释。
5、JUMP:无条件跳转到指定位置。
6、IF:条件判断语句。
附件:此处可以添加川崎常用指令的实际示例。
法律名词及注释:1、:根据国家法律法规和标准,指能自动执行工作的多自由度机械装置,具有感知、决策和执行功能。
2、关节角度:各个关节的转动角度。
3、目标位置坐标:执行运动的目标位置的坐标值。
机械指令的范围与操作流程

4.技术文件的建立
4.4 编制操作手册
机械搬运、使用与储存的相关信息。 • 机械安装的相关信息。 • 机械本身的相关信息。 • 机械使用的相关信息。 • 机械维护的相关信息。 • 紧急情况的相关信息。 • 其他与安全有关之注意事项说明。 • 附加之图表。 • 制造商之资料。 • 操作手册之章节目录与页码。
2.机械指令的范围
2.机械指令的范围
2.机械指令的范围
机械指令 (2006/42/EC)
依欧盟标准可大致分为三类: Type A standards (A 类标准)
又称 “基本安全标准“ (Fundamental Safety Standards)。主要是解说基 本概念,设计原则及名词解释,应用方法等大原则、大方向的标准,可适用于 所有机械的伊班情形。
2.机械指令的范围
续上页: 8. 木工用手提式链锯。 9. 采用人工上下料金属冷作加工用冲压床,包括折床,其移动之工作的行程超 过6mm ,速度每秒超过30mm 。 10. 人工上下料式之塑料射出或压缩成型机。 11. 人工上下料式之橡胶射出或压缩成型机。 12.下列地下工程用机器设备 : - 轨道上之机械:动力车头及制动车。 - 液压式鐩道顶支撑设备。 - 地下工程用机械所采用之内燃机。 13. 安装有压缩机械,及采用人工收集装载家庭垃圾之卡车。 14. 附件一之3.4.7节中所提万向接头之防护装与可分离式传动轴。 15. 维护车辆用顶高机。 16. 包括可能从三公尺以上垂直高度掉落之危险之人员举升装置。 17. 制造烟火的机械。
4.技术文件的建立
•机械规格表。 •电路图。 •电气元件表。 •外观尺寸图。 •机械组立图。 •机械零组件清单。 •油、气压回路图及其元件清单。 •安全相关元件 (如:断电开关、即停装置等)的指示与说明。 •警告标志的说明。
机械 专业术语
机械专业术语常用机械专业术语,了解掌握,不仅有助于业务的开展和进步,还能减少工作中的差错。
一般而言,经过归纳整理,机械行业通用的专业术语包括以下几个方面。
(1)计划指令控制(PMC)例如:提出一套新产品生产计划、物料需求计划、能力需求计划、设备维修计划等;或者提出一套调整原材料供应量的措施计划,并将它们发送到各个分厂。
(2)机器作业指令(CMP)例如:检查一下各个电动机的转速是否在规定的范围内;打开清扫装置,清除其上的尘土,关闭一下冷却水;“查看”一下主轴箱润滑油油位情况等。
(3)工序控制(SSC)例如:加工一批零件时,一个车间应根据工艺文件规定的加工顺序对每一道工序严格控制,防止出现“错、漏”现象。
(4)工艺文件(TD)例如:编写一份加工某种零件的工艺文件。
(5)标准作业指导书(StandardWorkout)例如:编制一份以某种产品为对象的标准作业指导书。
(6)工具和夹具(对刀具和辅具)例如:为一批即将加工的零件配备一套合适的工装。
(7)状态管理(SCM)例如:查看每个机床、车间和工厂里所使用的生产设备是否处于正常运行状态,并做好记录;关注某个主要生产设备的磨损情况并采取相应的维修保养措施。
(8)物流例如:审查库存信息并及时补充缺货情况,或根据库存情况确定订货数量。
(9)产品质量计划(PDC)例如:实施某个零件或一批零件的抽样检验计划,计划可从设计阶段开始。
用计划指令控制,可以保证各生产车间按照计划的进度组织生产;用作业指令控制,可以保证各生产车间正常、均衡地完成各项作业,避免各种浪费,提高劳动效率。
用工序控制,可以使零件在加工过程中不会出现“错、漏”,即便是加工过程中出现了“错、漏”也可以根据工序控制,予以纠正。
例如在外协厂家加工过程中,当该厂家没有按计划加工,或者加工工艺不达标,造成零件报废时,那么该批零件就需要返回给总装车间重新加工。
(10)操作控制(OOM)例如:执行自动上下料系统时,确认手动或自动系统已正确安装后才开始加工;确认物料状态符合要求后才放料;确认刀具和夹具都处于正确状态后才进行加工。
数控车床基本编程指令
数控车床基本编程指令
数控车床(Computer Numerical Control Lathe)的基本编程指令通常是用来描述加工轴向、径向、切削速度、进给速度等方面的操作。
下面是一些常见的数控车床基本编程指令:
G代码:用于指定不同的功能和动作。
例如:
G00:快速定位
G01:直线插补
G02:圆弧顺时针插补
G03:圆弧逆时针插补
G04:暂停(延时)
G28:回零点
G71:开启公制单位
G72:开启英制单位
M代码:用于控制机床的辅助功能和动作。
例如:
M03:主轴正转
M04:主轴反转
M05:主轴停止
M08:冷却液开启
M09:冷却液关闭
M30:程序结束
X、Y、Z轴坐标控制:用于控制工件在不同轴向上的移动。
例如:
X10.0:将X轴移动到坐标10.0处
Y5.0:将Y轴移动到坐标5.0处
Z-2.0:将Z轴移动到坐标-2.0处
F代码:用于设定进给速度(切削速度)。
例如:
F100:设定进给速度为每分钟100毫米(或英寸)
S代码:用于设定主轴转速。
例如:
S1000:设定主轴转速为每分钟1000转
T代码:用于选择工具。
例如:
T0101:选择编号为0101的刀具
这些是最基本的数控车床编程指令,实际上还有更多用于高级功能和特定应用的指令。
正确理解和使用这些指令对于确保数控车床操作的准确性和效率至关重要。
数控机床技术中常用指令解析

数控机床技术中常用指令解析数控机床是一种以数字信号控制运动准确度和位置的高精度自动控制设备,它通过指令来控制刀具的运动和加工过程。
在数控机床技术中,常用的指令有许多种,下面将对一些常用指令进行解析,以帮助读者更好地理解和应用数控机床技术。
1. G指令:G指令是数控机床中最常用的指令之一,用于设定在加工过程中的刀具运动方式和运动轨迹。
G指令后面的数值表示运动方式和轨迹。
例如,G00表示快速移动,G01表示线性插补,G02和G03表示圆弧插补等。
通过合理地运用G 指令,可以实现高效、精确的刀具运动路径。
2. M指令:M指令是数控机床中用于设定辅助功能的指令,常用于控制刀具的开关和冷却液的供给等工作。
例如,M03表示主轴正转,M04表示主轴逆转,M08表示冷却液开启等。
正确使用M指令可以提高加工效率和安全性。
3. F指令:F指令是数控机床中用于设定切削速度的指令,表示每分钟的进给速度。
通过合理地设置F指令,可以控制切削速度,避免切削过快或过慢。
切削速度的选择需要根据材料的硬度、刀具的性能和加工要求等因素进行合理确定。
4. S指令:S指令是数控机床中用于设定主轴转速的指令,表示每分钟的转速。
通过调整S指令,可以控制主轴的转速,适应不同材料和刀具的加工要求。
合理设置主轴转速有助于提高加工精度和加工效率。
5. T指令:T指令是数控机床中用于选择刀具的指令,用于控制刀具的更换和选择。
在加工过程中,不同形状和尺寸的刀具将完成不同的加工任务。
通过使用T指令,可以选择合适的刀具,保证加工质量和工艺要求。
6. X、Y、Z指令:X、Y、Z指令分别用于控制刀具在X轴、Y轴和Z轴上的运动坐标。
通过设置这些指令,可以控制刀具在工件上的移动轨迹和位置。
合理设置X、Y、Z指令可以确保加工精度和工件质量。
7. I、J、K指令:I、J、K指令用于控制刀具进行圆弧插补时的圆心位置。
当需要进行圆弧加工时,可以通过设置I、J、K指令来确定圆弧的半径和圆心位置。
数控车床常用指令精选全文完整版
可编辑修改精选全文完整版一、数控车床常用指令(一)主轴转速控制指令和主轴功能指令1、主轴功能指令主轴功能指令(S指令)是设定主轴转数的指令。
⑴主轴最高转速的设定(G50或G92)用来设定主轴的最高转速。
格式为:G50 S_ ; S_ 跟着主轴最大速度(r/min);⑵恒线速度控制指令(G96)系统执行G96后,认为用S指定的数值表示工件上任一点的线速度一样,主要用于车工件的端面、锥度或圆弧等,单位为m/min 。
如G96 S200⑶主轴转速控制指令(G97)G97是取消恒线速度控制的指令,这时S指定的数值表示主轴每分钟的转速,单位为r/min。
如G97 S30表示主轴转速为:30r/min2、固定循环切削固定循环切削是指对于在加工过程中,必须重复加工多次才能完成轮廓加工的典型切削形式,刀具运动的路径预先编好,存储在存储器中,用专门的G代码进行指令。
有单一形状固定循环和复合形状固定循环之分。
⑴单一形状固定循环指令(G90、G94)外圆切削循环指令格式为:G90 IP_ F__ ; (其中IP_是外径、内径切削终点坐标,F_是切削加工时刀具的进速度,其他都是按照快速进给速度进行的)该指令主要用于轴类零件的外圆、内圆和锥面的加工。
⑵端面切削循环指令(G94)该指令用于加工圆柱端面或角度大的圆锥面。
A.则切削圆柱端面的输入格式为: G94 X(U)_ Z(W)_ F_ ;其中,X_ Z_ 表示切削终点的绝对坐标,而U_ W_ 表示切削终点相对于刀具起点的增量坐标。
B.切削大锥面的输入格式为;G94 X(U)_ Z(W)_ K _ F_ ;其中,X(U)_ Z(W)_ 同圆柱端面,K_ 表示锥面轴向尺寸之差而且,当所切削的锥面起始点Z坐标大于终点Z坐标时为正,反之为负.(3)复合固定循环切削(G70---G76)用这些加工指令,只需给定最终精加工路径、循环次数和每次加工余量,机床就能自动确定粗加工的刀具路径。
工业机器人指令解析【大全】

机器人常用指令IF-如果满足条件,那么;否则MoveAbsJ-移动机械臂至**接头位置MoveC-使机械臂沿圆周移动MoveJ-通过接头移动,移动机械臂MoveL-使机械臂沿直线移动SetDO-改变数字信号输出信号值SetGO-改变一组数字信号输出信号的值Set-设置数字信号输出信号StartMove-重启机械臂移动Stop-停止程序执行StopMove-停止机械臂的移动WaitDI-等待直至已设置数字信号输入信号WaitDO-等待直至已设置数字信号输出信号WaitTime-等待给定的时间num-数值robtarget-位置数据------------------------------------------------------------------------------------- 机器人运用:1.waitTime:用于等待给定的时间例1:WaitTime0.5;程序执行等待0.5秒程序执行等待的最短时间(以秒计)为0s。
最长时间不受限制。
分辨率为0.001s。
详解:机器人程序指针执行到此条指令,必须等待0.5秒以后才继续往下执行!例2:WaitTime\InPos,0.5详解:在WaitTime指令后面加入了Inpos参数的含义就是:机器人到位且完全停止后才开始计时,时间到达0.5秒以后才继续往下执行!例3:MoveJp1,vmax,fine,tool2;WaitTime\InPos,0.5;MoveJp2,vmax,z30,tool2;详解:机器人到达P1位置点之后,并且机器人完全停止下来,才开始计时,时间到达0.5秒以后才机器人继续执行到达P2位置点。
2.WaitDI:用于等待,直至已设置数字信号输入例1:WaitDIdi4,1;仅在已设置di4输入后,继续程序执行。
详解:机器人程序指针执行到此条指令,需要等待开关信号di4为1的时候,才往下执行。
例2:WaitDIdi0,1\MaxTime:=3;详解:在WaitDIdi0,1指令后面加上了可选参数MaxTime:=3,则表示允许的最长等待时间3秒。
ce的常见指令、法规和产品适用范围
ce的常见指令、法规和产品适用范围CE指令、法规和产品适用范围一、CE指令和法规概述CE指令是指欧洲共同体(EU)针对市场上流通的产品所制定的一系列安全要求和测试程序。
CE指令的主要目的是确保产品在欧洲市场上销售和使用时符合相关的安全标准,并保护消费者的权益。
CE 指令涵盖了许多不同的领域,如机械、电子、医疗器械、玩具等。
CE指令的实施需要依据相关的法规,其中最重要的是欧洲共同体新方法指令(NLF)。
NLF主要规定了CE指令的适用范围、实施程序和法律责任等内容,是CE指令的核心法规。
二、CE指令的常见指令1. 机械指令(MD):适用于机械和机械设备,如工业机械、建筑机械、农业机械等。
该指令要求制造商对机械产品进行风险评估和安全测试,并提供符合安全标准的产品。
2. 低电压指令(LVD):适用于电气设备,如家用电器、电动工具等。
该指令要求电气设备的电压在安全范围内,并具备防止电击和火灾的安全特性。
3. 电磁兼容性指令(EMC):适用于电子设备和电气设备,如计算机、通信设备、汽车电子产品等。
该指令要求设备在电磁环境中不会产生干扰,同时也能够抵御外部电磁干扰。
4. 建筑产品指令(CPD):适用于建筑材料和建筑产品,如玻璃、钢材、水泥等。
该指令要求建筑产品符合相关的安全、健康和环境要求。
5. 医疗器械指令(MDD):适用于医疗器械和医疗设备,如心脏起搏器、医用X光设备等。
该指令要求医疗器械具备安全性、有效性和性能稳定性,并通过临床评估和性能测试来评估其风险。
6. 玩具指令(TOY):适用于玩具和游戏产品。
该指令要求玩具产品在设计、制造和使用过程中符合相关的安全标准,以保护儿童的安全。
三、CE指令的产品适用范围CE指令适用于所有希望将产品销售到欧洲市场的制造商、进口商和分销商。
无论是欧盟成员国的制造商还是来自非欧盟国家的制造商,只要希望将产品销售到欧洲市场,都需要遵守CE指令的要求。
CE指令的适用范围非常广泛,涵盖了各个行业的产品。
数控车床常用指令
一、数控车床常用指令(一)主轴转速控制指令和主轴功能指令1、主轴功能指令主轴功能指令(S指令)是设定主轴转数的指令。
⑴主轴最高转速的设定(G50或G92)用来设定主轴的最高转速。
格式为:G50 S_ ; S_ 跟着主轴最大速度(r/min);⑵恒线速度控制指令(G96)系统执行G96后,认为用S指定的数值表示工件上任一点的线速度一样,主要用于车工件的端面、锥度或圆弧等,单位为m/min 。
如G96 S200⑶主轴转速控制指令(G97)G97是取消恒线速度控制的指令,这时S指定的数值表示主轴每分钟的转速,单位为r/min。
如G97 S30表示主轴转速为:30r/min2、固定循环切削固定循环切削是指对于在加工过程中,必须重复加工多次才能完成轮廓加工的典型切削形式,刀具运动的路径预先编好,存储在存储器中,用专门的G代码进行指令。
有单一形状固定循环和复合形状固定循环之分。
⑴单一形状固定循环指令(G90、G94)外圆切削循环指令格式为:G90 IP_ F__ ; (其中IP_是外径、内径切削终点坐标,F_是切削加工时刀具的进速度,其他都是按照快速进给速度进行的)该指令主要用于轴类零件的外圆、内圆和锥面的加工。
⑵端面切削循环指令(G94)该指令用于加工圆柱端面或角度大的圆锥面。
A.则切削圆柱端面的输入格式为: G94 X(U)_ Z(W)_ F_ ;其中,X_ Z_ 表示切削终点的绝对坐标,而U_ W_ 表示切削终点相对于刀具起点的增量坐标。
B.切削大锥面的输入格式为;G94 X(U)_ Z(W)_ K _ F_ ;其中,X(U)_ Z(W)_ 同圆柱端面,K_ 表示锥面轴向尺寸之差而且,当所切削的锥面起始点Z坐标大于终点Z坐标时为正,反之为负.(3)复合固定循环切削(G70---G76)用这些加工指令,只需给定最终精加工路径、循环次数和每次加工余量,机床就能自动确定粗加工的刀具路径。
A.外径粗车循环 G71该指令适用于对毛坯料粗车外径和粗车内径。
ABB机器人常用指令总结

ABB机器人常用指令总结1. ProgramName:用户可以将编程的名称指定为ProgramName,该指令将定义当前编程的名称,例如,ProgramName=正在编程的程序名称示例。
2. Create: Create指令有三个补充部分,第一个部分是模式,要么用“INC”表示自动增量模式,要么用“TEACH”表示立体机械手模式,第二部分是程序号,第三部分是将要执行的程序号命令,例如,Create INC ProgramName 。
3. Add:当用户使用立体机械手模式编程时,使用Add相应指令添加新的点位,Add指令如下:Add [PointName] x y z a b c。
4. Move:用来控制机械手移动位置到目的位置,用户可以用下列指令定义移动方式:MoveJoint [Joint],MoveLin [Point],MoveCir [Point]和MoveComb。
5. End:当编程完成后,在程序的末尾应该编入End指令,一般结束一个程序的时候会回到原点,End指令有两个参数,第一个参数可以设置工具的坐标,设为“Work”;第二个参数可以设置用于到达home点的机械臂移动方式,设为“Joint”或“Lin”。
6. Speed:Speed指令可以用来控制机械臂运行的速度,在Speed指令中可以指定多个速度参数,例如,SpeedLin [velocity(m/s)], SpeedJoint [velocity(deg/s)]和SpeedTool [velocity (m/s)]。
7. Stop:当机械臂出现故障或在工作过程中又被迫暂停时,只要输入Stop指令就可以暂时停止机械臂的运行。
8. Wait:等待指令可以在机械臂完成某些指令之后,等待一定的时间后再继续执行下一个指令,单位是秒,例如,Wait 10 。
9. Comment: Comment指令用于在程序中添加任意的文本[1] 。
10. Manual: Manual指令用于退出自动模式,转入手动模式,在手动模式下,机械臂的运动受键盘,操作执行。
常用机器代码

常用機器代碼一.SODICK 指令代碼介紹N.O 序號G 準備功能X.Y.Z.U.V 軸移動I.J 圓弧的中心坐標T 指定有關機械控制的事項D. H 補償及補正編號A 錐度加工角度P 子程式的編號L 子程式重復執行的次數C 加工條件(文件編號)M 輔助功能Q 文件調用F 進給速度R 指定轉角圓弧過渡二.常用G代碼介紹G00 定位的移動(空跑)G01 直線切割G02 順時針圓弧切割G03 逆時針圓弧切割G40 消除電極絲補正G41 電極絲左補正G42 電極絲右補正G54~G59 工作坐標指令G90 絕對坐標指令G91 增量坐標指令G92 設定坐標原點的指令G97 設定坐標系坐標原點的命令三.常用T.M代碼T84 泵打開T85 泵關閉T89 切換到水噴流加工T94 切換到水浴加工M00 程序停止(暫停)M02 程序終止M98 調用子程序M99 子程序結束.四.簡易程式的"G09;" (消除鏡面)"G92G59X2.5Y11.5;" (設定G59坐標系)"G92G54G90X2.5Y11.5;" (絕對坐標設定G54坐標系)"M00;" (暫停穿線)"T84;" (噴強水)"G42C001;" (右補正轉換C001條件)"G01Y10.;" (直線切割增加補正)"H201;" (補正值)"G01X0.;""Y0.;""X10.;" (直線切割)"Y10.;""X7.5;""H000;" (補正轉換)"G50G40Y10.3;"(直線切割消除補正消除斜度)"M00;" (切斷料頭前暫停)"G42T84C001;" (右補正噴強水轉換C001條件)"G01Y10.;" (直線切割增加補正)"H200;" (補正值)"X3.2;" (直線切割)"M00;" (暫停落料)"X2.2;" (過切)"H000;" (補正轉換)"G50G40Y10.3;" (直線切割消除補正消除斜度)"M00;" (暫停)"M02;" (程式結束)"G09;" (消除鏡向)"G92G59X0.Y0.;" (將G59坐標系設為零點)"G92G54G90X0.Y0.;" (在絕對坐標將G54坐標系歸為零點)"M00;" (暫停穿線)"T84;" (噴強水)"G42C001;" (右補正轉換C001條件)"G01X3.536Y3.536;" (直線切割)"H201;" (增加補正值)"G02X-3.536Y-3.536I-3.536J-3.536;" (順時針圓弧切割)"X3.165Y3.871I3.536J3.536;" (順時針圓弧切割)"M00;" (暫停落料)"X3.536Y3.536I-3.165J-3.871;" (順時針圓弧切割)"X3.741Y3.317I-3.536J-3.536;" (順時針圓弧過切)"H000;" (補正轉換)"G50G40G01X3.367Y2.985;" (直線切割消除補正消除斜度)"M05G00X0.Y0.;" (回到起割點)"M00;" (暫停)"M02;" (程式結束)線割機台通用代碼G代碼G00 快速移動G00 X___Y___U___V___G01 直線加工G01 X___Y___U___V___G02 順時針圓弧加工G02 X___Y___ I___ J____G03 逆時針圓弧加工G03 X___Y____I___J____G04 G40 補正取消G40 X____Y____G41 向左補正G41 X____Y____G42 向右補正G42X____Y____G90 絕對值數據模式G90 (指定絕對坐標值)G91 相對值數據模式G91 (指定相對坐標值)G92 程式原點數據模式G92X___Y____I____J____U____V____M代碼M00 無條件停止工作M00 (當程式執行到M00單節時,機台將自動停止)M01 選擇性停止工作M01 (如果M01STOP按鍵按亮時,和M00功能相同)M02 程式結束M02 (指定主程式結束)统赢统达Mastercam 慢走丝编程视频教程QQ:985375298沙迪克慢走丝代码加工条件1.条件代码:C001 C002 C903 C904("9"开头条件为PIKA加工)2.ON-放电脉冲(ON)的时间000-031 100-131 300-3313.OFF-放电脉冲休止时间000-063 100-163 200-263 300-3634.IP-主电源电流波峰值000-015 1000-1015 2000-2015 1200-1215 2200-22155.HRP-辅助电源电路H:0-6 R:0-7 P:0-76.MAO-脉冲宽度调整M:0-9 A:0-9 O:0-97.SV-伺服基准电压0-2558.V-主电源电压0-99.SF-伺服速度0000-999910.C-电容011.PIK-PIKA选择000-03912.CTRL-选项(ACW除去部分功能的选项数据设定) 0000-009913.WK-电极丝控制000-49914.WT-张力控制0-25515.WS-电极丝速度0-25516.WP-高压喷流000-063T代码TP 主程序面TN 副程序面T80 走丝开T81 电极丝停止T82 加工槽液关T83 加工槽液开T84 进行高压喷流T85 停止高压喷T89 进行喷流加工T90 自动剪线T91 自动穿线T94 进行水浴加工T96 打开送液T97 停止送液M代码M00 快速定位M01 选择停止MO2 程序结束M03 代码搜索M05 忽略接触感知M06 不放电M98 调用子程式M99 返回主程序G代码G00 快速定位G01 走直线G02 顺圆加工G03 逆圆加工G04 延时G05 X轴镜像G06 Y轴镜像G07 Z轴镜像G08 轴交换G09 取消镜像G11 程序跳读开G12 程序跳读关G13 断线复位关G14 断线复位关G17 平面选择G22 软件限位开G23 软件限位关G26 图形形旋转开G27 图形形旋转关G28 注意点G29 主参照点复位G30 返回设置点G40 取消补正G41 向左补正G42 向右补正G48 边缘控制开G49 边缘控制关G50 取消锥度倾斜G51 锥度倾斜左G52 锥度倾斜右G54~G59工作坐标系G60主参照点设置G137 干涉错误有效G74 四轴补偿开G75 四轴补偿关G80 移动到接触感知G81 移动到机械极限G82 移动到原点至现坐标的一半G84 自动垂直定位G90 绝对坐标G91 相对坐标G92 设定坐标值G96 镜像撤消G97 把所有坐标系设置当前坐标值G104 转角延时开G105 转角延时关G126 坐标旋转开G127 坐标旋转关G132 干涉回避开G133 干涉回避关G134 锥度干涉回避开G135 锥度干涉回避关G136 干涉错误撤消G137 干涉错误有效G140 取消上下异形补偿G141 上下异形左补偿开G142 上下异形右补偿开G152 局部坐标其它代码:A 锥度(角度值)C 加工条件号码D,H 补正量(变量值)L 重复次数F 进给速度N、O 序列号Q 文件调用P 子程序调用号RX,RY图形旋转角度KA 坐标旋转角度RA 图形旋转角度RI,RJ 图形旋转中心KX,KY 坐标旋转角度R 圆弧过渡X、Y、U、V、I、J、Z坐标轴三菱(MITSU)線割機台代碼A 錐度A____ (角度)L 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)S 縮放比例S_____(常數)H 補正編號H_____(常數)E 加工條件E_____(正整數)F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數) G23 返回主程式G23G87 主程式與副程式圓角設定G87G88 自動化清角G88G89 取消自動化清角G89M20 自動穿線M20M21 自動剪線M21M80 噴水打開M80M81 噴水關閉M81M82 送線開始M82M83 送線結束M83M84 放電開始M84M85 放電結束M85M90 最適利進給打開M90M91 最適利進給結束M91统赢统达Mastercam 慢走丝编程视频教程QQ:985375298 庆鸿机常用代码A 錐度A____ (角度)L(O) 程式編號L_____(正整數)N 程式中加工孔號N_____(正整數)R 圓弧半徑R_____(常數)K 旋轉角度K_____(角度)H(D) 補正編號H_____(常數)E(S) 加工條件E_____(正整數)F 加工速度F_____(正數)G22 呼叫副程式G22L__(正整數) G23 返回主程式G23G87 主程式與副程式圓角設定G87G94 定速切割G94G95 伺服切割G95M20 自動穿線M20M21 自動剪線M21M80 噴水打開M80M81 噴水關閉M81M82 送線開始M82M83 送線結束M83M84 放電開始M84M85 放電結束M85M90 最適利進給打開M90M91 最適利進給結束M91M98 呼叫副程式M98L(P)__ (正整數)M99 返回主程式M99法蘭克(富士通FANUC) 線割機台代碼G10 設定補正值或者加工條件G10P__R__(補正值設定)G10P__X__Y__Z__U__V__W__I__J_K_(加工條件設定)G48 轉角R机能打開G48G49 轉角R机能關閉G49G50 取消錐度G50 X__Y__G51 向左側傾斜G51 X__Y__G52 向右側傾斜G52 X__Y__G94 定速切割G94X__Y__F__G95 伺服切割G95X__Y__夏米爾(CHARMILL) 線割機台代碼Aa 錐度A____ (角度)Cc 輔助平面旋轉角度C_____(角度)Ee 加工模式的選擇E____(正整數)Ff 多少秒閉鎖時間F____(常數)Hh 工件的厚度H____(常數)Rr 基准面与輔助平面之間的距离R____(常數)Ww 基准面与下部表面之間的距离G27 正常模式[取消模式G28,G29,G30和G32]G28 錐形模式,旋轉主軸類型[不變角]G29 尖角的錐形模式G30 恒定半徑的錐形模式G32 扭轉模式的約定和定義M03 起用電极絲進給M05 停用電极絲進給M06 自動穿絲M07 起用上部沖洗M08 起用下部沖洗M09 停用上部與下部沖洗M12 自動線切割M20 起用加工M21 停用加工。
加工中心常用的G代码和M指令

加工中心常用的G代码和M指令在现代机械加工领域,加工中心凭借其高精度、高效率和高自动化程度成为了不可或缺的重要设备。
而要熟练操作加工中心,掌握其常用的 G 代码和 M 指令是关键。
G 代码是准备功能指令,用于指定机床的运动方式和加工动作。
下面我们来详细了解一些常见的 G 代码。
G00 快速定位指令,使刀具以最快的速度移动到指定位置。
这个指令常用于刀具在加工前的快速接近和加工完成后的快速退刀。
G01 直线插补指令,用于让刀具沿着直线轨迹移动。
通过指定终点坐标和进给速度,机床能够精确地实现直线加工。
G02 和 G03 分别是顺时针圆弧插补和逆时针圆弧插补指令。
在进行圆弧加工时,我们需要指定圆弧的起点、终点、圆心坐标或半径,以及进给速度,从而控制刀具沿着圆弧轨迹运动。
G04 是暂停指令,可用于在加工过程中需要短暂停留的情况,比如让刀具在某个位置停留一段时间,以保证加工质量。
G17、G18、G19 分别用于选择不同的平面,即 XY 平面、XZ 平面和 YZ 平面。
G20 和 G21 则是用于设定单位,G20 表示英制单位,G21 表示公制单位。
G28 是返回参考点指令,它能让刀具自动返回机床设定的参考点位置。
G40、G41、G42 分别是刀具半径补偿取消、左补偿和右补偿指令。
在加工轮廓时,使用刀具半径补偿可以简化编程,提高加工精度。
G43 和 G44 是刀具长度补偿指令,用于补偿刀具长度的差异,确保加工深度的准确性。
M 指令是辅助功能指令,主要用于控制机床的各种辅助动作。
M00 是程序暂停指令,当程序执行到 M00 时,机床会暂停运行,直到按下启动按钮才继续执行。
M03 表示主轴正转,M04 表示主轴反转,M05 则是主轴停止转动。
M06 是换刀指令,用于在加工过程中更换刀具。
M08 和 M09 分别是冷却液开和冷却液关指令,控制冷却液的喷射和停止。
M30 是程序结束指令,当程序执行到 M30 时,机床会自动复位,并返回程序开头。
数控车床所有常用指令.

数控车床所有常用指令主要用他们编程还有f进给速度 s主轴转速等等这是g代码G00快速移动点定位G01直线插补G02顺时针圆弧插补G03逆时针圆弧插补G04暂停G05---G17XY平面选择G18ZX平面选择G19YZ平面选择G32螺纹切削G33---G40刀具补偿注销G41刀具补偿——左G42刀具补偿——右G43刀具长度补偿——正G44刀具长度补偿——负G49刀具长度补偿注销G50主轴最高转速限制G54~G59加工坐标系设定G65用户宏指令G70精加工循环G71外圆粗切循环G72端面粗切循环G73封闭切削循环G74深孔钻循环G75外径切槽循环G76复合螺纹切削循环撤销固定循环G81定点钻孔循环G90绝对值编程G91增量值编程G92螺纹切削循环G94每分钟进给量G95每转进给量G96恒线速控制G97恒线速取消G98返回起始平面G99返回R平面G功能字SIEMENS系统G00快速移动点定位G01直线插补顺时针圆弧插补G03逆时针圆弧插补G04暂停G05通过中间点圆弧插补G17XY平面选择G18ZX平面选择G19YZ平面选择G32---G33恒螺距螺纹切削G40刀具补偿注销G41刀具补偿——左G42刀具补偿——右G43---G44---G49------G54~G59 零点偏置G65---G70英制G71米制G72---G73---G74---G75---G76---G80撤销固定循环G81固定循环G90绝对尺寸G91增量尺寸G92主轴转速极限直线进给率G95旋转进给率G96恒线速度G97注销G96G98---G99---辅助功能 M 代码功能作用范围功能代码功能作用范围功能M00 * 程序停止 M36 * 进给范围1M01 * 计划结束 M37 * 进给范围2M02 * 程序结束 M38 * 主轴速度范围1M03 主轴顺时针转动 M39 * 主轴速度范围2M04 主轴逆时针转动 M40-M45 * 齿轮换档M05 主轴停止 M46-M47 * 不指定M06 * 换刀 M48 * 注销M49M07 2号冷却液开 M49 * 进给率修正旁路M08 1号冷却液开 M50 * 3号冷却液开M09 冷却液关 M51 * 4号冷却液开M10 夹紧 M52-M54 * 不指定M11 松开 M55 * 刀具直线位移,位置1M12 * 不指定 M56 * 刀具直线位移,位置2M13 主轴顺时针,冷却液开 M57-M59 * 不指定M14 主轴逆时针,冷却液开 M60 更换工作M15 * 正运动 M61 工件直线位移,位置1M16 * 负运动 M62 * 工件直线位移,位置2M17-M18 * 不指定 M63-M70 * 不指定M19 主轴定向停止 M71 * 工件角度位移,位置1M20-M29 * 永不指定 M72 * 工件角度位移,位置2M30 * 纸带结束 M73-M89 * 不指定M31 * 互锁旁路 M90-M99 * 永不指定M32-M35 * 不指定1. F功能F功能指令用于控制切削进给量。
FANUC系统常用指令
一、FANUC系统常用指令1、快速定位指令G002、直线插补指令G013、圆弧插补指令G02、G03该指令使刀具从圆弧起点沿圆弧移动到圆弧终点。
4、主轴速度设置指令和转速控制指令G96、G97、G50。
(1)主轴线速度恒定指令G96格式:G96 S; S单位为m/min。
此时应限制主轴最高转速,即用G50指令。
如:G50 S1500;主轴最高转速限制为1500r/min。
(2)直接设定主轴转速指令G97。
格式:G97 S; S的单位为r/min (注:一般系统 G97)G96、G97均为模态指令,可相互取消。
5、每转进给指令G99和每分钟进给指令G98。
格式:G99 F; F单位为mm/rG98 F; F单位为mm/minG98、G99均为模态指令,机床初始状态默认G99。
6、螺纹车削加工(可加工直螺纹和锥螺纹)方式有直进式和斜进式(1)螺纹切削指令G32,可车削直螺纹、锥螺纹和端面螺纹。
G32指令进刀方式为直进式。
注:螺纹切削时不可用主轴线速度恒定指令G96。
格式:G32 XZF;其中:XZ为螺纹终点坐标,F为螺距。
螺纹深度计算:h=0.6495p 螺纹小径:d1=d-h×27、刀具功能指令T格式:T 02 02T:为刀具02:刀具号00-9902:刀具补偿号00-99注;(1)刀具号可与转位刀架上的刀具号相对应。
(2)刀具补偿包括形状补偿和磨损补偿。
(3)为了方便,刀具号和刀具补偿号通常是一致的。
(4)刀具号为0或00时,取消刀具;刀具补偿号为0或00时,相当于取消补偿。
例:T0或T00、T0200。
8、辅助功能指令MM00—程序停止 M01—选择停止 M02—程序停止M03、M04、M05—主轴正、反、停转 M08—切削液开M09—切削液关 M30—程序结束并返回M98—子程序调用 M99—子程序调用返回(子程序结束)二、固定循环指令为了简化程序,数控装置可以用一个程序段指定刀具作反复切削,这就是固定循环指令。
机械产品常用指令共27页

谢谢
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱4、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
机械产品常用指令
16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 充满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安全要求
- 防止电气设备引起的危险 a)应避免人身、家畜受到因与电气直接或间接接触 引起的身体或其他伤害的危险 b)不会产生可能引起危险的温度、弧光或辐射 c)充分保护人身、家畜及财产免受由电气设备引起 的,根据经验发现的非电气危险 d)绝缘必须适合于各种可能预见的情况
安全要求
-防止外在因素影响电气设备产生危险 a)电气产品应达到预期的机械要求,使人身、家畜 及财产免受危险 b)电气产品在预定的环境条件下,可抵抗非机械性 的影响因素,使人身、家畜及财产免受危险 c)电气产品在可预见的超负荷情况下,不致危及人 身、家畜及财产安全
安全总则
-机械设计和制造时必须考虑以下问题: a)在保证其功能的前提下,机械在制造商预定的条件使用、 调整、维修、储运、安装和处理时不会给人带来风险; b)不仅必须考虑机械的正常使用,还应预计到合理的使用习 惯和必须注意防止引起风险的不正常的使用; c) 要考虑人类功效学原理; d) 必须考虑操作者使用必要的或可预见的个人防护装备所带 来的约束; e) 必须考虑机械所配备的所有设备和附件在调整、维护和使 用中不会产生风险。
安全总则
- 制造商在设计和制造机械时,必须按照下列原则 和顺序选择最合适的方法: a) 尽可能消除和降低风险(通过机械的固有安全 设计和制造) b) 对不能消除的风险,应采取必要的防护措施; c) 告知使用者,由于所采用的防护措施不足所带 来的遗留风险,并指明是否需要特殊培训和规定 所需要的个人防护装备。
不适用的产品
使用于易爆炸环境内的电气设备 为放射线及医疗目的使用的电气产品 货运、客运升降机的电气零部件 电表 家用的插头及插座 电子篱笆控制器 无线电-电干扰 船舶、飞机或铁路使用的专用电气设备
安全要求
- 一般要求 a) 为确保电气设备按预定用途使用安全,在电气产 品上应标注使用特性、识别和遵守的事项,困难 时,可在说明书中说明 b)在电气产品上清楚地标注制造商名称、商标名称 或商标,困难时,可印在包装上 c)电气设备及其零部件的制造,应确保能安全地和 适当地连接和装配 d)电气设备及其零部件的制造,在其设计用途内使 用与维护的情况下,必须保证符合以下b、c条的 要求
机械的定义
- 机械的组合,为了达到同一目的,若干台机械经 适当配置和控制,作为一个综合整体,实现完整 的功能;
- 改变机械功能用的可更换设备,该设备投放市场 目的是为了使操纵者能将其与一台机械或一系列 不同的机械装配组装起来,或与牵引机装配组合。 就该设备本身来说不是配件或工具
机械的定义
- „安全零部件“指的是零部件,不是可更换设备,
为确保人员安全而特别设计的电子敏感装置 双手控制确保安全功能的逻辑装置 压力机防护的自动可移式隔离屏 翻滚防护装置 坠落物防护装置
低电压电气指令(73/23/EEC)
- 适用范围 该指令适用于电气设备,具体而言,是指设计使 用与交流电压50V至1000V和直流电压为75V至 1500V的任何电气设备
常用术语
电磁骚扰-指任何可能降低装置、设备或系统部件 性能的任何电磁现象。电磁骚扰可能是电磁噪声、 无用信号或传播介质本身的变化 抗扰度-指在有电磁骚扰的情况下,器件、设备或 系统部件不降低质量的运行能力 电磁兼容性-指器件、设备或系统部件在电磁骚扰 环境中能良好地运行和不会对环境中的任何东西 造成不能容忍的电磁骚扰的性能
不适用机械指令的机械
• • • • • 运输工具 远洋船只与近海机动设备,连同其上的装备 公共或私人载人索道(包括缆车) 农业和林业用拖拉机 为军用或警用设计和制造的机械
不适用机械指令的机械
• 用于建筑物的特定高度的永久性升降设备 • 使用安装齿轮及齿条轨道式的车辆的人员运输装 置 • 矿山卷扬装置 • 舞台升降机 • 运送人或人与货物的建筑工地升降机
机械可能产生的危险
机械危险 挤压危险 剪切危险 切割或切断危险 缠绕危险 吸入或卷入危险 冲击危险 刺伤或扎伤危险 磨擦或磨损危险 高压流体喷射危险 零件抛出危险 稳定性丧失 滑倒、绊倒和跌倒的危险
机械可能产生的危险
非机械危险 电的危险 极限温度带来的危险 火灾的危险 爆炸的危险 噪声的危险 振动的危险 辐射的危险 使用激光装置的危险 粉尘、气体扩散的危险 忽视人类功效学原理产生的危险 加工材料所带来的危险
该零部件由制造商或其在欧洲共同体内确定的授 权代理投放市场,在使用中实现安全功能,当安 全零部件发生故障或失效时,会危及暴露者的安 全或健康
不适用机械指令的机械
• 仅以人力作为动力源的机械,用于升降负荷的机 械除外 • 直接与病人接触的医疗机械 • 集市场所或(和)游乐场所得专用设备 • 蒸汽锅炉、罐与压力设备 • 为核用途而特别设计或应用的机械,在出现故障 时,会导致放射性辐射 • 机械零部件形成的放射源 • 轻武器 • 汽油、柴油、易燃液体及危险物质的储罐和输送 管道
危险机械
金属冷加工用压力机 手工上料或下料塑料注射或挤压成型机 手工上料或下料橡胶注射或挤压成型机 地下作业机械 装有压缩装置、收集家庭垃圾用的人工装载车 附件I 中3.4.7所述防护装置和带万向接头的可拆传 动轴 起重用的车辆 垂直高度超过3m有跌落风险的载人升降机 制造烟火的机械
安全零部件
- 安全零部件:
机械产品应遵循的指令和标准
- 机械产品在加施CE标志和(或)随产品附 带EC合格声明时,主要应遵循机械指令,并 符合其要求。由于机械往往存在电、电磁干 扰等多种危险,所以除机械指令外,机械产 品往往还应遵循低压指令、电磁兼容等有关 指令。
机械指令( 98/37/EC)
- 机械指令中所述的机械包括单台的机械、有联系 的一组机械和可更换设备。 (1)机械是指由若干个零部件连接而成的组件, 其中至少有一个零部件可以运动,并通过适当的 致动器、控制装置、动力回路等连接起来,并用 于特定的用途,尤其是用于物料加工、处理、搬 运或包装;
与操作有关的安全与卫生要求
1)对机械控制(操纵)提出了要求。要求控制系统 的设计和制造必须安全可靠; 2)对机械传动件和与加工过程直接有关的运动件的 防护措施的选择做出了规定; 3)为保证机械维护时的安全,规定了相应的要求; 4)对各种信息装置、标志和机械说明书提出了要求
危险机械
机械: 木材和类似材料或肉类和类似材料加工用的单片或多片圆 锯机 手工进给的木工片面刨床 手工上、下料的木工单面压刨床 木材和类似材料或肉类和类似材料加工用的带锯机 木材及类似材料加工用的组合机床 木材加工用、多刀夹、手工进给开榫机 木材及类似材料用立轴制模机 木材加工用手提式链锯
基本要求
- 仪器的制造应使其在通常电磁兼容性环境里,具 有充分的电磁抗扰度水平,以便使装置能正常运 行 - 随附装置的说明书中必须有预定用途所需的信息
基本要求
- 仪器产生的最大电磁干扰不得妨碍下列仪器的使 用: • 家用无线电和电视接收机 • 工业制造设备 • 移动式无线电设备 • 移动式无线电通讯工具和商用无线电话设备 • 医学和科学器材 • 信息技术设备
基本要求
• • • • • • 家用电器和家用电气设备 航空和航海无线电器材 电化教学设备 无线电通讯网络和器材 无线电广EEC)
- 适用范围 (1)该指令适用于易于产生电磁干扰或其性能易 受电磁干扰影响的装置。 装置-指所有电气、电子器具以及装有电气或(和) 电子器件的设备和成套装置。 (2)该指令不适用于有专门指令规定保护要求的 装置,该指令也不适用于无线电业余爱好者使用 的无线电设备。