2016年控制系统仿真试卷(A)
运动控制系统试卷A答案

《运动控制系统》课程试卷(A 卷)答案第1篇 直流调速系统(60分)一、填空题(每空1分,共23分)1. 运动控制系统由电动机、功率放大与变换装置、控制器及相应的传感器等构成。
2. 转矩控制是运动控制的根本问题,磁链控制与转矩控制同样重要。
3. 生产机械常见的三种负载是恒转矩负载、恒功率负载和平方率负载。
4. 某直流调速系统电动机额定转速1430/min N n r =,额定速降115/min N n r ∆=,当要求静差率30%s ≤时,允许的调速范围为5.3,若当要求静差率20%s ≤时,则调速范围为3.1,如果希望调速范围达到10,所能满足的静差率是44.6%。
5. 数字测速中,T 法测速适用于低速,M 法测速适用于 高速 。
6. 生产机械对调速系统转速控制的要求有 调速 、稳速和加减速 三个方面。
7、直流电机调速的三种方法是:调压调速、串电阻调速和弱磁调速。
8、双闭环直流调速系统的起动过程分为电流上升阶段、恒流升速阶段和 转速调节三个阶段。
9. 单闭环比例控制直流调速系统能够减少稳态速降的实质在于它的自动调节作用,在于它能随着负载的变化而相应的改变电枢电压,以补偿电枢回路电阻压降的变化。
二、选择题(每题1分,共5分)1、双闭环直流调速系统,ASR 、ACR 均采用PI 调节器,其中ACR 所起的作用为( D )。
A 、实现转速无静差B 、对负载变化起抗扰作用C 、输出限幅值决定电动机允许的最大电流D 、对电网电压波动起及时抗扰作用2、典型I 型系统与典型II 型系统相比,( C )。
A 、前者跟随性能和抗扰性能均优于后者B 、前者跟随性能和抗扰性能不如后者C 、前者跟随性能好,抗扰性能差D 、前者跟随性能差,抗扰性能好3、转速单闭环调速系统对下列哪些扰动无克服能力,( D )。
A 、电枢电阻B 、负载转矩C 、电网电压D 、速度反馈电位器4、下述调节器能消除被控制量稳态误差的为( C )。
计算机控制系统A试卷带答案

***********2015-2016 学年第一学期出题教师:【计算机控制系统】课程试题(A卷) 【闭卷考试】姓名学号专业及班级本试卷共有4道大题一、填空题(共14分,每空1分,共11道小题)1. 描述连续系统所用的数学模型是微分方程,描述离散系统所用的数学模型是差分方程。
2.离散系统稳定性不仅与系统结构和参数有关,还与系统的采样周期有关。
3.在计算机控制系统中存在有五种信号形式变换,其中采样、量化、零阶保持器等三种信号变换最重要。
4. 计算机控制系统通常是由模拟与数字部件组成的混合系统。
5. 在连续系统中,一个系统或环节的频率特性是指在正弦信号作用下,系统或环节的稳态输出与输入的复数比随着正弦信号频率变化的特性。
6.采样周期也是影响稳定性的重要参数,一般来说,减小采样周期,稳定性增强。
7.对于具有零阶保持器的离散系统,稳态误差的计算结果与T无关,它只与系统的类型、放大系数及输入信号的形式有关。
8.若D(s)稳定,采用向前差分法离散化,D(z)不一定稳定。
9.双线性变换的一对一映射,保证了离散频率特性不产生频率混叠现象,但产生了频率畸变。
10.计算机控制系统分为三类:直接数字控制 (Direct Digital Control,DDC) 系统、计算机监督控制 (Supervise Control by Computer,SCC) 系统和分散型计算机控制系统(Distributed Control System,DCS)二、选择题(满分20分,每小题2分,共10道小题)1.电力二极管属于 A 。
A.不可控器件B. 全控器件C.半控器件2.电力电子器件不具有的特征有 B 。
A.所能处理电功率的大小是其最重要的参数B.一般工作在放大状态C.一般需要信息电子电路来控制D.不仅讲究散热设计,工作时一般还需接散热器3. 晶闸管内部有 C 个PN结。
A 一B 二C 三D 四4.下列哪种功能不属于变流的功能 CA.有源逆变B. 交流调压C. 变压器降压D. 直流斩波5.下列不属于使晶闸管关断的方法是 A 。
(完整版)控制系统数字仿真题库

控制系统数字仿真题库一、填空题1. 定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以为环境的作用称为系统的输出。
2.系统的三大要素为:实体、属性和活动。
3.人们描述系统的常见术语为:实体、属性、事件和活动。
4.人们经常把系统分成四类,它们分别为:连续系统、离散系统、采样数据系统和离散-连续系统。
5、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。
6.根据描述方法不同,离散系统可以分为:离散时间系统和离散事件系统。
7. 系统是指相互联系又相互作用的实体的有机组合。
8.根据模型的表达形式,模型可以分为物理模型和数学模型二大类,其中数学模型根据数学表达形式的不同可分为二种,分别为:静态模型和动态模型。
9、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统内在规律的模型称为数学模型。
10.静态模型的数学表达形式一般是代数方程和逻辑关系表达式等,而动态模型的数学表达形式一般是微分方程和差分方程。
11.系统模型根据描述变量的函数关系可以分类为线性模型和非线性模型。
12 仿真模型的校核是指检验数字仿真模型和数学模型是否一致。
13.仿真模型的验证是指检验数字仿真模型和实际系统是否一致。
14.计算机仿真的三个要素为:系统、模型与计算机。
15.系统仿真的三个基本活动是系统建模、仿真建模和仿真试验。
16.系统仿真根据模型种类的不同可分为:物理仿真、数学仿真和数学-物理混合仿真。
17.根据仿真应用目的的不同,人们经常把计算机仿真应用分为四类,分别为:系统分析、系统设计、理论验证和人员训练。
18.计算机仿真是指将模型在计算机上进行实验的过程。
19. 仿真依据的基本原则是:相似原理。
20. 连续系统仿真中常见的一对矛盾为计算速度和计算精度。
21.保持器是一种将离散时间信号恢复成连续信号的装置。
22.零阶保持器能较好地再现阶跃信号。
控制系统数字仿真考试题
H《控制系统数字仿真》复习题一、选择1.将多项式展开的命令中正确的是 D 。
(A)conv([1,2,2],conv([4,1],[1,1])) (B)conv([2,2,1],conv([4,1],[1,1]))(C)conv([2,2,1],conv([1,4],[1,1])) (D)conv([1,2,2],conv([1,4],[1,1]))2.下列命令中可以创建起始值为0,增量值为0.5,终止值为10的等差数列的是A 。
(A)a=0:0.5:10 (B)a=linspace(0,10,0.5) (C)linspace(0,10,10)(D)logspace(0,1,11) 3.MATLAB系统中要清除工作区(Workspace)中的内容,只需在命令窗口输入 C 。
(A)clf (B)clc (C)Clear (D)clg4.列出工作内存中的变量名称以及细节,只需在命令窗口输入 A 。
(A)what (B)who (C)echo on (D)whos5.若B=[3 2 7 4 9 6 1 8 0 5],则B([end-3:end])为 C 。
(A)3 7 1(B)3 2 7 4 9 9 4 7 2 3(C)3 4(D)1 8 0 56.下列符号中可以引导注释行的是 D 。
(A)& (B)@ (C)$ (D)%7.MATLAB系统中合法的变量为 C 。
(A)25aa (B)f.3 (C)ha_23 (D)s\258.设A=[0 2 3 4;1 3 5 0],B=[1 0 5 3;1 5 0 5]则A>=B的结果为 B 。
(A)0 0 0 0 (B)0 1 0 1 (C)1 1 0 1 (D)1 1 0 01 0 0 0 1 0 1 0 0 0 1 0 0 0 1 09.用Matlab系统中的Format long命令设置显示格式后,430/12的显示结果为B 。
(A)35.833 3 (B)35.833 333 333 333 34(C)35.8 3e+01 (D)3.583 333 333 333 334e+0110.设a=1-5*i,则real(a)结果为 C 。
《自动控制系统计算机仿真》习题参考答案
《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
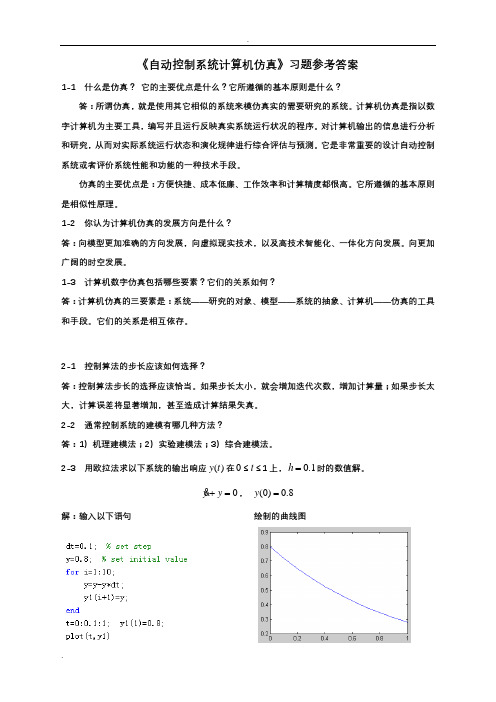
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0y y +=, (0)0.8y =解:输入以下语句 绘制的曲线图2-4 用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
自动控制原理试卷及答案
1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t te et y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分))(t p )(t r -++)(t y 1+s )1(1+s s +(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
自动控制原理试卷及答案

1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分)(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、系统的信号流图如图所示,求输出C (S )的表达式。
控制系统数字仿真模拟题
控制系统数字仿真模拟题一、填空题1、数值积分法中,计算精度p=2的是 梯形法2、 混合法 是机理模型法和统计模型法的结合3、柔性制造系统属于 离散事件 系统.4、零极点增益形式可用于分析系统的 稳定性 和 快速性5、 现实性 、 简洁性 、 适应性 是建立系统模型应该依照的原则.6、系统的三大要素为: 实体 、 属性 和活动。
7、通常仿真时多采用四阶龙格 库塔法 、其原因就是这种计算公式的截断误差较小.8、 相似论 是系统仿真的主要依据.9、一个电机转速控制系统中,属于电机所具有的属性的为: 电机转速10、我们在选择数值算法的时候要 考虑精度 、 计算速度 以及稳定性等原则进行.二、单选题1.运行下列命令后A1=[1,2,3;4,5,6;7,8,9];A2=A1;A3=cat(1,A1,A2),系统输出结果为( B )A.123147456258789369B.123456789147258369C.123456789D.147258369 2.设某一系统的状态方程矩阵为a=[-3,1;1,-3];b=[1,1;1,1];c=[1,1;1,-1];d=[0]并且执行后得可控性矩阵和可观性矩阵的秩分别为cam=ctrb(a ,b)=1,rcam=rank(cam)=2,因此这一系统为( D )A.不可控且不可观的系统B.可控且可观的系统C.可控但不可观的系统D.不可控但可观的系统3.可以将模块按照顺时针进行旋转的快捷键为( A )A.ctrl+rB.ctrl+yC.alt+rD.alt+y4.在Matlab 系统中,调用Simulink环境的工具栏图标为( A )A. B. C.5.下列符号中可以引导注释行的是( D )A.&B.@C.$D.%6.若A=412303214--⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦,则C=(A>0)&(A<3)的结果为( B )A.001001011B.001000010C.111110110D.0011100107.MATLAB系统中若要使系统选择short和shortE中最好的表示,则采用命令( C )A.shortB.shortEC.shortGD.longE8.列出工作内存中的变量名称以及细节,只需在命令窗口输入( A )A.whatB.whoC.echoonD.whose9.设一个五阶魔方阵B=magic(5),提取B阵的第1行,第2行的第1,3,5个元素的命令为( B )A.B(1,2:[1,3,5])B.B([1:2],[1,3,5])C.B([1:2],1:3:5))D.B(1:2;[1,3,5])10.下列命令中可以创建起始值为0,增量值为0.5,终止值为10的等差数列的是( A )A.a=0:0.5:10B.a=linspace(0,10,0.5)C.linspace(0,10,10)D.logspace(0,1,11)11.若a=[102;300;130;111],则any(a)=( C )A.011B.110C.111D.10012.设s=‘haha’,可以看到字符s的ascii码值的命令为( C )A.size(s)B.isstr(s)C.abs(s)D.eval(s)13.PSPICE是( B )软件.A.模型及混合信号仿真软件B.模拟电路仿真软件C.机械系统动力学自动分析软件D.大型通用有限元分析软件14.将多项式2(22)(4)(1)s s s s++++展开的命令中正确的是( D )A.conv([1,2,2],conv([4,1],[1,1]))B.conv([2,2,1],conv([4,1],[1,1]))C.conv([2,2,1],conv([1,4],[1,1]))D.conv([1,2,2],conv([1,4],[1,1]))15.w=conv([1,2,3],conv([1,2],[1,1]))的值为( C )A.3111372B.2713113C.1511136D.151422219三、判断题1.影响系统而又不受系统直接控制的全部外界因素的集合叫外部活动.( 错)2.系统仿真就是建立系统的动态模型并在模型上进行实验(或试验).(对)3.状态方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础.( 错)4.global可以定义全局变量,全局变量的作用域是该MATLAB函数的整个工作区,其他的函数不能对它们进行存取和修改( 错)5.MATLAB中clf用于清除图形窗口上的旧图形(对)6.控制系统的数学模型有状态空间表达式,微分方程和积分方程( 错)7.仿真就是利用模型(物理模型或数学模型)代替实际系统进行实验和研究(对)8.离散相似法采样周期的选择应该满足香农定理(采用定理)(对)9.通常情况下,模拟仿真较数字仿真精度高( 错)10.机理模型法需要对系统的内部结构和特性完全的了解,但其精度较低( 错)11.绘制系统根轨迹的命令式是rlocus(对)12.仿真所遵循的基本原理是相似原理,即几何相似和数学相似(对)13.在MATLAB中,plot命令用于绘制三维图形( 错)14.绘制系统单位阶跃响应曲线的命令是step(对)15.系统仿真有三个基本的活动是模型建立,模型变换和模拟实验( 错)16.机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系(对)17.欧拉法的计算精度p=3( 错)18.绘制系统单位脉冲响应曲线的命令是implus(对)19.MATLAB的含义为矩阵实验室(对)20.margin(G)的含义是计算系统的相角裕度和幅值裕度(对)四、问答题:1.什么是仿真?它的主要优点是什么?它所遵循的基本原则是什么?[答案]:系统仿真是以相似原理,系统技术,信息技术及其应用领域有关的专业技术为基础,以计算机和各种专用物理效应设备为工具,利用系统模型对真实的或设想的系统进行动态研究的一门多学科的综合性技术.它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段.仿真的主要优点是:方便快捷,成本低廉,工作效率和计算精度都很高.它所遵循的基本原则是相似性原理.2.控制系统CAD可解决那些问题?[答案]:控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论.此外,自适应控制,自校正控制以及最优控制等现代控制测略都可利用CAD 技术实现有效的分析与设计.3.控制系统建模的基本方法有哪些?他们的区别和特点是什么?[答案]:控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法.机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系.该方法需要对系统的内部结构和特性完全的了解,精度高.统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型.该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求.混合法是上述两种方法的结合.4.什么是离散系统?什么是离散事件系统?如何用数学的方法描述它们?[答案]:本课程所讲的”离散系统”指的是离散时间系统,即系统中状态变量的变化仅发生在一组离散时刻上的系统.它一般采用差分方程,离散状态方程和脉冲传递函数来描述.离散事件系统是系统中状态变量的改变是由离散时刻上所发生的事件所驱动的系统.这种系统的输入输出是随机发生的,一般采用概率模型来描述.5.动态系统仿真中常用的数值算法有哪几类,分别是什么?[答案]:主要有求解线性和非线性微分方程的数值积分法和计算线性时不变动态系统的离散相似法.其中,数值积分法主要有:欧拉(Euler)法,梯形法,龙格—库塔(Runge-Kutta)法和阿达姆斯(Adams)法;离散相似法主要有:置换法和相似变换法.6.为什么说模拟仿真较数字仿真精度低?其优点如何?.[答案]:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低,但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真;(2)仿真速度极快,失真小,结果可信度高;(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关;(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真;(5)易于和实物相连.7.采样控制系统数字仿真中连续部分离散化时的步长h如何选取?[答案]:(1)若仿真的任务仅要求计算系统输出y(t)而不要求计算系统内部状态变量,且连续部分的整体脉冲传递函数G(z)=Z[Gh(s)G0(s)]较易求出时,可选h=T(2)若连续部分整体脉冲传递函数G(z)=Z[Gh(s)G0(s)]不易求出;或仿真的任务要求计算系统输出y(t)和内部状态变量;或被控对象含有非线性环节时,可选h=T/N(N为正整数).8.采样控制系统数字仿真有哪几种方法?[答案]:采样控制系统仿真通常有差分方程递推求解法,双重循环方法,应用MATLAB控制工具箱时域响应分析函数法和Simulink仿真法.9.计算机仿真有哪些优点?[答案]:(1)对尚处于论证或设计阶段的系统进行研究,唯一的方法就是仿真.(2)经济,安全,效率高.(3)研究系统非常方便灵活.10.评价优化方法的优劣的应该考虑哪些因素?[答案]:三方面因素:(1)收敛性:收敛性的好坏表示某种优化方法适用范围的大小,具体表示算法对于相当一类目标函数均能找到最优点.(2)收敛速度:为了求出同样精度的最优点,不同的优化方法所需要的迭代次数不同,迭代次数少的优化方法收敛速度较快.(3)每步迭代所需的计算量:每步迭代所需的计算量也是决定寻优速度的另一重要因素.。
控制系统数字仿真 吉大考试题库答案
控制系统数字仿真单选题:1:将A矩阵逆时针旋转90°的命令为 3.rot90(A,1)2:设一个五阶魔方阵B=magic(5),提取B阵的第1行,第2行的第1,3,5个元素的命令为2.B([1:2],[1,3,5])3:设a=1-5*i,则real(a)结果为3.14:A = [ 1 2 3 ]; B = [ 4 5 6 ]; C = A./B 则C的结果为 1.0.2500 0.4000 0.50005:若a=[1 0 2;3 0 0;1 3 0;1 1 1],则any(a) = 3.1 1 16:用Matlab系统中的Format long命令设置显示格式后,430/12的显示结果为2.35.833 333 333 333 347:能够产生3行4列的单位矩阵的命令为 1.eye(3,4)8:一个电机转速控制系统中,属于电机所具有的属性的为2.电机转速9:一个由电控阀门开启的控制系统中,属于阀门所具有的属性的为4.阀门的开度10:下列命令中可以创建起始值为0,增量值为0.5,终止值为10的等差数列的是 A. a=0:0.5:1011:能够产生2行4列的0~1分布的随机矩阵的命令为 3.rand(2,4)12:若A = -4 -1 2 -3 0 3 -2 1 4 则C=(A>0)&(A<3)的结果为:2.001 000 01013:A=[1,2;3,4],则2.^A的值为 A.14:( )是系统仿真的主要依据3.相似论15:下列符号中可以引导注释行的是 4.%16:设(a,b,c,d)为某一系统的状态方程矩阵,下列函数中可求出状态空间系统的可控性矩阵的为 1.ctrb(a,b)17:MATLAB系统中要清除工作区(Workspace)中的内容,只需在命令窗口输入。
3.Clear18:设某一系统的状态方程矩阵为a=[-3,1;1,-3];b=[1,1;1,1];c=[1,1;1,-1];d=[0] 并且执行后得可控性矩阵和可观性矩阵的秩分别为cam=ctrb(a,b)=1 rcam=rank(cam)=2 因此这一系统为 4.不可控但可观的系统19:柔性制造系统属于() 系统3.离散事件系统38.下列程序的执行结果a为________。
集散控制系统(DCS)试卷A.doc

《集散控制系统应用》试题( A 卷)一、填空( 40分):1. 集散控制系统通常由、、、和五个主要部分组成。
2. 控制部分是集散系统的核心,其功能包括、、和控制。
3. 常用的通信介质主要有、和。
4. 国产 SUPCON JX-300X的三层通信网络是指、和。
5. 集散控制系统又成为分散控制系统,英文简称;现场总线控制系统简称为。
6. JX-300X 集散控制系统控制站卡件有、和。
7. 集散控制系统的设计一般分为、、和四个部分。
8. TDC3000 系统早期技术比较成熟的现场控制站是。
9. 冗余的两种方式是指和。
10. 写出五种常用的数字滤波算法、、、和。
11. 从生产角度,集散控制系统大致分为、、和级。
12. TDC-3000万能控制网 UCN 属于过程控制层,实时控制网络包括、和。
13. 集散控制系统的验收分工厂验收和两个阶段。
二、名词解释( 20分):1、集散控制系统:2、组态:3、数字滤波:4、现场总线:5、实时:三、简答( 40分):1.与常规模拟仪表相比,集散控制系统具有哪些优点?2.过程接口单元分为几类?各适用于什么场合?3.增强型操作站( EOS)是有哪几部分构成的?其功能是什么?4、集散控制系统选择的一般原则应考虑哪些方面?试卷标准答案一、填空:(每空 1.5 分 , 共 40分)1、过程控制单元、过程接口单元、CRT显示操作站、管理计算机、高速数据通道2、连续控制、逻辑控制、顺序控制、批量控制3、双绞线、同轴电缆、光缆4、信息管理网、过程控制网络、SBUS总线5、 DCS、 FCS6、主控制卡、数据转发卡、系统I/O 卡件7、方案论证、方案设计、工程设计、系统文件设计8、多功能控制站MC9、工作冗余、后备冗余10、程序判断法、中位值法、算术平均滤波法、递推平均滤波法、加权平均滤波法、一阶惯性滤波法、复合滤波法等(选5种)11、过程控制级、控制管理级、生产管理级、经营管理级12、过程管理站、先进过程管理站、逻辑管理站13、现场验收二、简答(每题15分)1、集散控制系统( DCS)是以微处理器为基础的分散性综合控制系统,是计算机、通信、CRT显示和控制技术发展起来的产物。
控制系统数字仿真
1.(4分)一个由电控阀门开启的控制系统中,属于阀门所具有的属性的为:________。
• A. 电网电压• B. 阀门材质• C. 阀门开启• D. 阀门的开度得分:0 知识点:控制系统数字仿真作业题收起解析答案D解析2.(4分)PSPICE是_______________软件。
• A. 模型及混合信号仿真软件• B. 模拟电路仿真软件• C. 机械系统动力学自动分析软件• D. 大型通用有限元分析软件得分:0 知识点:控制系统数字仿真作业题收起解析答案B解析3.(4分)MATLAB系统中要改变当前工作目录,只需在命令窗口输入________ 。
• A. chdir• B. dir• C. clear• D. pack得分:0 知识点:控制系统数字仿真作业题收起解析答案A解析4.(4分)系统传递函数,则我们只需输入命令____表示输入的是上述传递函数所代表的系统[num,den]。
• A. num=[10,0,1];den=[1,2,3,15]• B. num=[1,0,10];den=[15,3,2,1]• C. num=[10,0,1];den=[15,3,2,1]• D. num=[1,0,10];den=[1,2,3,15]得分:0 知识点:控制系统数字仿真作业题收起解析答案D解析5.(4分)A = [ 1 2 3 ];B = [ 4 5 6 ];C = A./B 则C的结果为________。
• A. 0.2500 0.4000 0.5000• B. 4.0000 2.5000 2.0000• C. 0.4156• D. 2.2857得分:0 知识点:控制系统数字仿真作业题收起解析答案A解析6.(4分)下列程序的执行结果a为________。
function f=factor(n)if n==1f=1;return;elsef=n*factor(n-1)return;enda=factor(6)• A. 720• B. 120• C. 6• D. 0得分:0 知识点:控制系统数字仿真作业题收起解析答案A解析7.(4分)执行以下指令之后E,F的值分别为________。
控制系统建模与仿真实验考核试卷
A.比例控制器
B.积分控制器
C.微分控制器
D.模糊控制器
8.在控制系统仿真中,以下哪些方法可以用于求解微分方程?()
A.欧拉法
B.龙格-库塔法
C.亚当斯法
D.最小二乘法
9.以下哪些因素可能导致控制系统的稳态误差?()
A.控制器参数设置不当
B.系统模型不准确
2. ABCD
3. ABC
4. ABCD
5. ABC
6. ABC
7. ABC
8. ABC
9. ABCD
10. ABC
11. ABCD
12. ABC
13. ABCD
14. ABCD
15. ABC
16. ABCD
17. ABCD
18. ABCD
19. BCD
20. ABCD
三、填空题
1.初始条件
2.调整时间
三、填空题(本题共10小题,每小题2分,共20分,请将正确答案填到题目空白处)
1.控制系统的开环传递函数是系统输入与输出之间的数学关系,且与系统的______无关。
2.在控制系统中,______是衡量系统快速性的性能指标。
3.常用的控制系统仿真软件有MATLAB、Simulink和______。
4.控制系统的稳定性分析中,如果所有极点都位于______,则系统是稳定的。
5.在PID控制器中,______环节主要用于消除系统的稳态误差。
6.控制系统的______裕度是指系统在单位反馈条件下,开环增益变化到系统刚好发生振荡时的增益变化量。
7.伯德图法是一种用于分析控制系统稳定性的方法,它通过绘制系统的______和相角曲线来评价系统的性能。
控制系统仿真试题参考2解析
控制系统仿真试题参考2解析频率特性类题⽬1 ⼀个系统的开环传递函数为,试绘制其当K=5、30时系统的开环频率特性Nyquist 图,并判断系统的稳定性。
2系统开环传递函数为,建⽴其零极点增益模型,然后分别绘制当K=5、K=30时系统的开环频率特性Bode 图,并判断系统的稳定性。
3 系统开环传递函数为,计算K=5和K=30时系统的幅值裕度与相位裕度。
4 已知某系统的闭环传递函数()s Φ如下,试⽤roots ()命令来判断系统的稳定性。
25432325()24576s s s s s s s s ++Φ=+++++5 某单位负反馈系统的开环控制系统的传递函数为2k (0.80.64)()(0.05)(5)(40)K s s G s s s s s ++=+++(1)绘制系统的根轨迹;(2)当10K =时,绘制系统的Bode 图,判断系统的稳定性,并且求出幅值裕度和相⾓裕度。
6 已知系统的状态空间模型如下:=11x -31x + ??01u [1=y ]1x(1)绘制系统的Bode 图和nyquist 图;(2)求系统的幅值裕度和相位裕度;7 已知单位负反馈系统的开环传递函数为)1(12++s s s ,试绘制系统的单位阶跃响应、开环Bode 图和Nyquist 曲线,并求系统的幅值裕度和相位裕度。
)5.01)(1.01()(s s s k s G ++=)5.01)(1.01()(s s s ks G ++=)5.01)(1.01()(s s s ks G ++=8 ⽤筛选法求某⾃然数范围内的全部素数。
素数是⼤于1,且除了1和它本⾝以外,不能被其他任何整数所整除的整数。
⽤筛选法求素数的基本思想是:要找出2~m 之间的全部素数,⾸先在2~m 中划去2的倍数(不包括2),然后划去3的倍数(不包括3),由于4已被划去,再找5的倍数 (不包括5),…,直到再划去不超过的数的倍数,剩下的数都是素数。
9 已知 ∑=-=nk k y 1121,当n=100时,求y 的值。
《控制系统仿真》考试试卷
《控制系统仿真》考试试卷一、单选题(每题3分,共30分)1. 控制系统仿真中,以下哪种模型常用于描述线性时不变系统?()A. 状态空间模型。
B. 非线性微分方程。
C. 传递函数模型。
D. 以上都不是。
2. 在Matlab中,用于求解线性常微分方程数值解的函数是()。
A. ode45.B. plot.C. roots.D. eig.3. 对于一个二阶系统,其阻尼比ξ = 0.5,无阻尼自然频率ω_n = 2rad/s,系统的特征方程为()。
A. s^2 + 2s + 4 = 0B. s^2+ s+ 4 = 0C. s^2+ 4s + 4 = 0D. s^2 + 2s+1 = 04. 传递函数G(s)=(1)/(s(s + 1))的极点为()。
A. 0和 - 1。
B. 0和1。
C. -1和1。
D. 仅0。
5. 在控制系统仿真中,离散系统的仿真步长选择主要取决于()。
A. 计算机性能。
B. 系统的动态特性。
C. 人为随意设定。
D. 输入信号的频率。
6. 以下哪种方法不属于控制系统的分析方法()。
A. 时域分析法。
B. 频域分析法。
C. 根轨迹法。
D. 蒙特卡洛法。
7. 若系统的开环传递函数为G(s)H(s)=(K)/(s(s + 2)(s+3)),则系统的根轨迹起始于()。
A. 0, - 2, - 3.B. 0,2,3.C. -1, - 2, - 3.D. 1,2,3.8. 在控制系统的频域分析中,幅频特性表示()。
A. 输出信号与输入信号的幅值比随频率的变化关系。
B. 输出信号与输入信号的相位差随频率的变化关系。
C. 系统的稳定性随频率的变化关系。
D. 系统的阻尼比随频率的变化关系。
9. 采用Simulink进行控制系统仿真时,以下哪个模块用于表示积分环节?()A. Gain.B. Integrator.C. Transfer Fcn.D. Scope.10. 对于一个稳定的控制系统,其闭环极点应位于()。
机器人控制系统仿真与优化考核试卷

6.稳定性和鲁棒性是机器人控制系统设计时需要同时考虑的性能指标。()
7.机器人控制系统的设计只需要关注控制算法,无需考虑执行机构的特性。()
8.智能化机器人控制系统可以在完全无需人工干预的情况下工作。()
9.机器人控制系统的路径规划与动力学建模没有直接关系。()
B.自适应能力
C.决策能力
D.完全无需人工干预
13.机器人控制系统中的传感器类型包括以下哪些?()
A.位置传感器
B.速度传感器
C.加速度传感器
D.视觉传感器
14.以下哪些技术可以用于机器人控制系统中的路径规划?()
A. A*算法
B. Dijkstra算法
C. RRT算法
D. PID控制
15.在机器人控制系统设计中,以下哪些因素可能影响系统的鲁棒性?()
A.模型参数的准确性
B.控制算法的合理性
C.仿真软件的性能
D.考试时间
13.关于机器人控制系统的稳定性和鲁棒性,以下哪个说法错误?()
A.稳定性是指系统在扰动作用下能够恢复到平衡状态的能力
B.鲁棒性是指系统在不确定性因素影响下仍能保持稳定性的能力
C.稳定性和鲁棒性是互相矛盾的性能指标
D.提高稳定性通常会影响系统的动态性能
A.精确性
B.稳定性
C.自适应性
D.经济性
3.在机器人控制系统仿真中,以下哪个参数不是动力学模型的必要参数?()
A.质量
B.摩擦力
C.电流
D.速度
4.关于PID控制,以下说法错误的是:()
A. P代表比例
B. I代表积分
C. D代表微分
D. PID控制适用于所有类型的机器人控制系统
控制系统仿真答案
控制系统仿真答案一.选择题二.名词解释及简答题1.系统的三个属性是什么?请解释其具体含义。
答:系统的三个属性:整体性、相关性、隶属性。
整体性:各部分(子系统)不能随意分割。
相关性:各部分(子系统) 以一定的规律或方式相联系,由此决定了其特有的性能。
隶属性:不能清楚的分出系统“内部”与“外部”,常常需要根据研究的问题来确定哪些属于系统的内部因素,哪些属于外部环境,其界限也是随不同的研究目的而变化,将这一特性称之为隶属性。
2.试利用图形表示仿真的基本内容以及其相互关系。
答:3.简述传统的设计流程以及基于虚拟样机的设计流程的区别(可用图形表示)。
答:三.判断题,正确的在括号内打“√”,错误的打“╳”,并改正错误结论重新阐述。
1.(√)为了限制所研究问题涉及的范围,一般用系统边界把被研究的系统与系统环境区分开来。
2.(╳)模型按数学模型的形式分为:物理仿真、数学仿真、数学-物理混合仿真或半实物仿真。
改1:按模型的性质分为:物理仿真、数学仿真、数学-物理混合仿真或半实物仿真。
改2:按数学模型的形式分为:连续系统仿真、离散事件系统仿真、离散—连续系统仿真。
3.(√)series函数可以将两个系统按串联方式连接,它即适合于连续时间系统,也适合于离散时间系统。
4.(√)S-函数为Simulink的“系统”函数,它是能够响应Simulink求解器命令的函数,采用非图形化的方法实现一个动态系统。
5.(╳)Matlab在执行运算符的优先级的时候,逻辑运算符“<”的优先级要高于矩阵乘法运算“*”的优先级。
改:Matlab在执行运算符的优先级的时候,逻辑运算符“<”的优先级要低于矩阵乘法运算“*”的优先级。
四、2、main(){float x,money;Scanf(“%f/n”,&x);If(x<50) then money=2.5*xElse if(x>=50 and x<100)Else if (x>=100)Then money=2.5*x*(1-0.2) ;Printf(“money=%f”,money);}五.综合题1.编程实现以下图形绘制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
xxxx 学院2015 —2016学年度第( 2)学期期未试卷科 目:控制系统仿真 (A )卷 考试形式:开卷、上机 考试时间: 120 分钟所属学院:自动化学院 班级: 姓名: 学号:答题注意事项:以下题目请大家在计算机上完成,并将结果写成电子文档上交。
电子文档中应包含以下几项内容:仿真程序代码、仿真结果截图、仿真实验结论。
一、基于MATLAB 的控制系统数学建模(20分)1、已知某一单位负反馈控制系统,其开环增益、零极点分别为5,[2;4]K z ==--,[1;3]p =--,求其闭环系统的零极点增益模型、传递函数模型以及状态空间模型。
(10分)(答题包括:仿真程序代码、程序输出结果) 解:代码:题 目 一 二 三 总分 标准分数 20 60 20 100 实得分数 评卷人装订线考 生 答 题 不 得 超 过 此 线clearz=[-2 -4]'; p=[-1 -3]'; k=5Gzpk=zpk(z,p,k) %得到系统zpk 模型k =5Zero/pole/gain:5 (s+2) (s+4)-------------(s+1) (s+3)a =-4.0000 -1.73211.7321 0b =1c =10.0000 14.4338d =5num =5 30 40 den =2、如图1所示的系统:21s s()R s ()Y s图1. 系统结构图其输入信号为()31(5)r t t =⨯-,试使用Simulink 构造其仿真模型,并观察其响应曲线,最后将该闭环控制系统封装成一个子系统。
(10分)(答题包括:Simulink 仿真模型、程序输出结果) 解:二、控制系统的时域分析(60分) 1、系统结构如图2所示2100025s s()R s ()Y s图2. 系统结构图用Matlab 程序编程,判别系统的稳定性;若系统为稳定的,求取系统的,,%p s t t 。
(15分)(答题包括:仿真程序代码、程序输出结果)解: 代码如下结果如下clear G=tf([1000],[1 25 0]); %系统GGc=feedback(G,1) %得到闭环系统传递函数pzmap(Gc) %绘制系统零极点分布图 Transfer function: 1000 ----------------- s^2 + 25 s + 1000结论:系统几点都在s 平面的左半平面,所以此负反馈系统是稳定的。
计算系统的,,%p s t t 代码如下结果如下clear s=tf('s');Gk=1000/s/(s+25);G0=feedback(Gk,1,-1) %得到闭环传递函数 [y,t]=step(G0); %返回系统时域响应曲线值 C=dcgain(G0); %得到系统终值 %峰值时间计算 [max_y,k]=max(y); peak_time=t(k)%超调量的计算 max_overshoot=100*(max_y-C)/C%调整时间的计算 s=length(t);while y(s)>0.98*C&&y(s)<1.02*C s=s-1end settling_time(s) %得到调整时间Transfer function:1000 ----------------- s^2 + 25 s + 1000peak_time = 0.1091 max_overshoot =25.86232. 若单位负反馈系统的开环控制系统的传递函数为k ()(3)(6)KG s s s s =++(1)绘制系统的根轨迹,确定当系统稳定时,参数K 的取值范围;(15分) (2)当28.6K =时,设计滞后补偿使得系统满足:超调量小于17%,同时速度误差系数为10。
(30分)(答题包括:仿真程序代码、滞后补偿器分析与设计、程序输出结果)解:(1) 结果如下clear;num=[1];den=conv([1 3],[1 5 0]); G=tf(num,den);K=0:0.05:200; %给定K 的取值范围 rlocus(G ,K) %绘制系统根轨迹[K,POLES]=rlocfind(G) %交互式地选取根轨迹上的增益,这里用于选取其临界稳定值结论:0=<K<=95.5(2)结论:0<=K<=153.5Select a point in the graphics windowselected_point =-0.0332 + 4.1460i K =153.5802POLES = -8.9136 -0.0432 + 4.1507i -0.0432 - 4.1507izeta=0:0.001:0.99; %给定不同zeta 值sigma=exp(-zeta*pi./sqrt(1-zeta.^2))*100; %求出对应不同zeta 值的sigma 值plot(zeta,sigma) %绘制zeta 值的sigma 值得关系曲线 xlabel('\zeta'); ylabel('\sigma');title('\sigma % =e^{-\zeta*\pi/sqrt(1-\zeta^2)}*100%','fontsize',16) gridz=spline(sigma,zeta,17) %求出sigma=17时的zeta 值G0=tf(1,conv([1 3 0],[1 6])); rlocus(G0); sgrid(z,[])zz=0.49130.10.20.30.40.50.60.70.80.910102030405060708090100ζσσ%=e-ζ*π/sqrt(1-ζ2)*100%11 G0=tf(1,conv([1 3 0],[1 6]));rlocus(G0);sgrid(.4913,[])-20-15-10-505-15-10-5510150.4910.491Root LocusReal Axis I m a g i n a r y A x i s-4-3-2-1012-2-112345System: G0Gain: 28.3P ole: -0.994 + 1.74i Damping: 0.495Overshoot (%): 16.7Frequency (rad/sec): 2.010.4910.491Root LocusReal Axis I m a g i n a r y A x i s12 G=zpk(z,p,1);>> rlocus(G)>> sgrid(.4913,[])>> figure(2)>> k=28.6;>> step(feedback(k*G ,1)) -25-20-15-10-50510-20-15-10-505101520System : GGain: 40.4P ole: -0.838 + 2.18iD am ping: 0.358Overshoot (%): 30F requency (rad/sec): 2.340.4910.491R oot LocusR eal AxisI m a g i n a r yA xi sStep ResponseTim e (sec)A m pl itu d e 012345600.20.40.60.811.21.4System : untitled1Tim e (sec): 1.89Am plitude: 1.17System : untitled1Tim e (sec): 3.97Am plitude: 0.98>>13[n,d]=tfdata(G ,'v');>> kv=dcgain(28.6*[n,0],d) kv = 11.1111 三、控制系统的频域分析(20分) 设单位负反馈系统的受控对象为 k 767160.()(3)(6)9G s s s s =++ 绘制系统的Bode 图;判断系统的稳定性;如果系统稳定,求出幅值裕度和相角裕度。
(20分)(答题包括:仿真程序代码、程序输出结果) 解:装 订 线 考 生 答 题 不 得 超 过 此 线 delta=6; s=tf('s'); G=160.7679/s/(s+3)/(s+6); figure(1) margin(G) step(feedback(G,1)) [Gm,Pm]=margin(G) GmdB=20*log10(Gm); [Gm,Pm]Gm =1.0077Pm =0.2064ans =1.0077 0.206414。