控制系统仿真实验指导书
控制系统CAD与仿真实验指导书
实验一MATLAB的实验环境及基本命令一实验目的:1.学习了解MA TLAB的实验环境2.在MA TLAB系统命令窗口练习有关MA TLAB命令的使用。
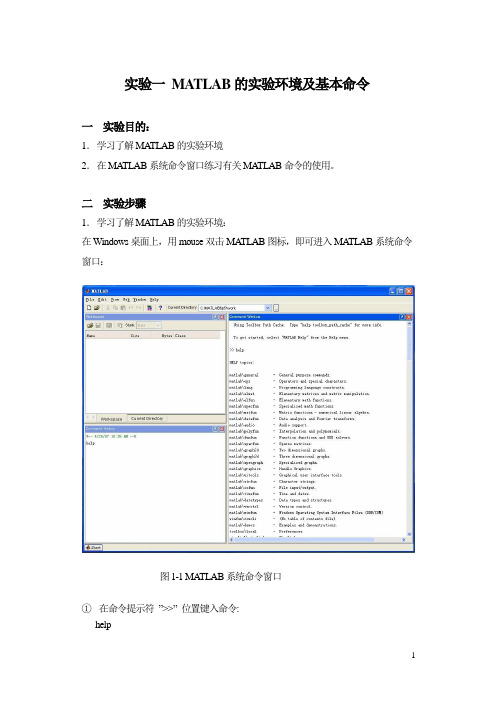
二实验步骤1.学习了解MA TLAB的实验环境:在Windows桌面上,用mouse双击MA TLAB图标,即可进入MA TLAB系统命令窗口:图1-1 MA TLAB系统命令窗口①在命令提示符”>>”位置键入命令:help此时显示MA T ALAB 的功能目录, 其中有“Matlab\general ”,“toolbox\control ”等;阅读目录的内容;② 键入命令:intro此时显示MA TLAB 语言的基本介绍,如矩阵输入、数值计算、曲线绘图等。
要求阅读命令平台上的注释内容,以尽快了解MA TLAB 语言的应用。
③ 键入命令:help help显示联机帮助查阅的功能,要求仔细阅读。
④ 键入命令:into显示工具箱中各种工具箱组件和开发商的联络信息。
⑤ 键入命令:demo显示MA TLAB 的各种功能演示。
2. 练习MA TLAB 系统命令的使用。
① 表达式MA TLAB 的表达式由变量、数值、函数及操作符构成。
实验前应掌握有关变量、数值、函数及操作符的有关内容及使用方法。
练习1-1: 计算下列表达式:要求计算完毕后,键入相应的变量名,查看并记录变量的值。
②.向量运算: )6sin(/250π=d 2/)101(+=a )sin(3.2-=e c i b 53+=n 维向量是由n 个成员组成的行或列数组。
在MA TLAB 中,由分号分隔的方括号中的元素产生一个列向量;由逗号或空号分隔的方括号中的元素产生一个列向量;同维的向量可进行加减运算,乘法须遵守特殊的原则。
练习1-2已知:X=[2 ;-4;8]求 :Y=R ';P=5*R ;E=X .*Y ;S=X '* Y练习1-3⑴产生每个元素为1的4维的行向量;⑵产生每个元素为0的4维的列向量;⑶产生一个从1到8的整数行向量,默认步长为1;⑷产生一个从π到0,间隔为π/3的行向量;③矩阵基本运算操作。
自动控制原理实验实验指导书

自动控制原理实验目录实验一二阶系统阶跃响应(验证性实验) (1)实验三控制系统的稳定性分析(验证性实验) (9)实验三系统稳态误差分析(综合性实验) (15)预备实验典型环节及其阶跃响应一、实验目的1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响。
2.学习典型环节阶跃响应测量方法,并学会由阶跃响应曲线计算典型环节传递函数。
二、实验内容搭建下述典型环节的模拟电路,并测量其阶跃响应。
1.比例(P)环节的模拟电路及其传递函数示于图1-1。
2.惯性(T)环节的模拟电路及其传递函数示于图1-2。
3.积分(I)环节的模拟电路及其传递函数示于图1-3。
4. 比例积分(PI)环节的模拟电路及其传递函数示于图1-4。
5.比例微分(PD)环节的模拟电路及其传递函数示于图1-5。
6.比例积分微分(PID)环节的模拟电路及其传递函数示于图1-6。
三、实验报告1.画出惯性环节、积分环节、比例积分环节、比例微分环节、比例积分微分环节的模拟电路图,用坐标纸画出所记录的各环节的阶跃响应曲线。
2.由阶跃响应曲线计算出惯性环节、积分环节的传递函数,并与由模拟电路计算的结果相比较。
附1:预备实验典型环节及其阶跃响应效果参考图比例环节阶跃响应惯性环节阶跃响应积分环节阶跃响应比例积分环节阶跃响应比例微分环节阶跃响应比例积分微分环节阶跃响应附2:由模拟电路推导传递函数的参考方法1. 惯性环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:整理得进一步简化可以得到如果令R 2/R 1=K ,R 2C=T ,则系统的传递函数可写成下面的形式:()1KG s TS =-+当输入r(t)为单位脉冲函数时 则有输入U 1(s)=1输出U 2(s)=G(s)U 1(s)= 1KTS-+由拉氏反变换可得到单位脉冲响应如下:/(),0t TK k t e t T-=-≥ 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)= 11K TS s-+由拉氏反变换可得到单位阶跃响应如下:/()(1),0t T h t K e t -=--≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2323R R C T R R =+2Cs12Cs-(s)U R10-(s)U 21R R +-=12212)Cs (Cs 1(s)U (s)U )(G R R R s +-==12212)Cs 1((s)U (s)U )(G R R R s +-==由拉氏反变换可得到单位斜坡响应如下:/()(1),0t T c t Kt KT e t -=--≥2. 比例微分环节令输入信号为U 1(s) 输出信号为U 2(s) 根据模电中虚短和虚断的概念列出公式:(s)(s)(s)(s)(s)U100-U U 0U 2=1R1R23(4)CSU R R '''---=++由前一个等式得到 ()1()2/1U s U s R R '=- 带入方程组中消去()U s '可得1()1()2/11()2/12()1134U s U s R R U s R R U s R R R CS+=--+由于14R C〈〈,则可将R4忽略,则可将两边化简得到传递函数如下: 2()23232323()(1)1()11123U s R R R R R R R R G s CS CS U s R R R R R ++==--=-++如果令K=231R R R +, T=2323R R C R R +,则系统的传递函数可写成下面的形式:()(1)G s K TS =-+当输入r(t)为单位脉冲函数时,单位脉冲响应不稳定,讨论起来无意义 当输入r(t)为单位阶跃函数时 则有输入U 1(s)=1/s输出U 2(s)=G(s)U 1(s)=(1)K TS S-+由拉氏反变换可得到单位阶跃响应如下:()(),0h t KT t K t δ=+≥当输入r(t)为单位斜坡函数时 则有输入U 1(s)=21s输出U 2(s)=G(s)U 1(s)=2(1)K TS S -+由拉氏反变换可得到单位斜坡响应如下:(),0c t Kt KT t =+≥实验一 二阶系统阶跃响应(验证性实验)一、实验目的研究二阶系统的两个重要参数阻尼比ξ和无阻尼自然频率n ω对系统动态性能的影响。
PLC实验指导书
PLC实验指导书1. 简介PLC(Programmable Logic Controller,可编程逻辑控制器)是一种专门用于工业自动化控制的设备。
本实验指导书旨在帮助学生了解PLC的基本原理和实际应用,提供一系列实验指导,帮助学生掌握PLC的使用方法。
2. 实验设备2.1 PLC主机:本实验使用模拟PLC主机。
具体型号为XXX。
2.2 输入模块:用于接收外部传感器的信号并输入给PLC主机。
具体型号为XXX。
2.3 输出模块:用于控制外部执行机构,如电动阀门、电机等。
具体型号为XXX。
3. 实验一:PLC基本控制原理3.1 实验目的:通过本实验,学生将了解PLC的基本控制原理,理解PLC工作的流程和信号的输入与输出。
3.2 实验内容:3.2.1 搭建实验电路:将PLC主机、输入模块和输出模块按照指导书上的电路图连接起来。
3.2.2 编写控制程序:使用PLC编程软件,编写一个简单的控制程序,使得当一个开关被按下时,某个输出模块输出高电平。
3.2.3 上载程序到PLC主机:将编写好的控制程序上载到PLC主机中,使其开始运行。
3.2.4 运行实验:按下开关,观察输出模块是否正常工作。
4. 实验二:PLC在自动化流水线中的应用4.1 实验目的:通过本实验,学生将了解PLC在自动化流水线中的应用,学会使用PLC进行自动化生产控制。
4.2 实验内容:4.2.1 搭建实验电路:按照指导书上的电路图,搭建一个模拟的自动化流水线系统,包括传送带、气缸等。
4.2.2 编写控制程序:使用PLC编程软件,编写一个控制程序,使得流水线能够按照一定的节奏,自动将产品输送到下一个工位。
4.2.3 上载程序到PLC主机:将编写好的控制程序上载到PLC主机中,使其开始运行。
4.2.4 运行实验:观察流水线系统是否按照预期工作,产品是否能够顺利地传送到下一个工位。
5. 实验三:PLC在温度控制系统中的应用5.1 实验目的:通过本实验,学生将了解PLC在温度控制系统中的应用,学会使用PLC进行温度的测量和控制。
《计算机控制系统实验》指导书新编xu[1]1
![《计算机控制系统实验》指导书新编xu[1]1](https://img.taocdn.com/s3/m/ba0d0676dc36a32d7375a417866fb84ae55cc35b.png)
目录目录 (1)实验一数据输入输出通道 (2)实验二信号采样与保持 (5)实验三数字PID控制 (7)实验四直流电机闭环调速控制 (9)实验五温度闭环数字控制 (11)实验六最少拍控制器的设计与实现 (13)附录 (15)实验一数据输入输出通道实验目的:1.学习A/D转换器原理及接口方法,并掌握ADC0809芯片的使用。
2.学习D/A转换器原理及接口方法,并掌握TLC7528芯片的使用。
实验设备:PC机一台,TD-ACC+实验系统一套,i386EX系统板一块实验内容:1.编写实验程序,将-5V~+5V的电压作为ADC0809的模拟量输入,将转换所得的8位数字量保存于变量中。
2.编写实验程序,实现D/A转换产生周期性三角波,并用示波器观察波形。
实验原理:1.A/D转换实验ADC0809芯片主要包括多路模拟开关和A/D转换器两部分,其主要特点是:单电源供电、工作时钟CLOCK最高可达到1200KHz、8位分辨率,8个单端模拟输入端,TTL电平兼容等,可以很方便地和微处理器接口。
ADC0809 芯片,其输出八位数据线以及CLOCK 线已连到控制计算机的数据线及系统应用时钟1MCLK (1MHz)上。
其它控制线根据实验要求可另外连接(A、B、C、STR、/OE、EOC、IN0~IN7)。
实验线路图1-1为:图1-1 A/D转换实验接线图上图中,AD0809 的启动信号"STR"是由控制计算机定时输出方波来实现的。
"OUT1" 表示386EX 内部1#定时器的输出端,定时器输出的方波周期=定时器时间常数。
ADC0809 芯片输入选通地址码A、B、C 为"1"状态,选通输入通道IN7;通过单次阶跃单元的电位器可以给A/D 转换器输入-5V ~ +5V 的模拟电压;系统定时器定时1ms 输出方波信号启动A/D 转换器,并将A/D 转换完后的数据量读入到控制计算机中,最后保存到变量中。
自动控制原理实验指导书(学生版)
编著 李蔓华 陈昌虎 李晓高自动控制理论实验指导书目录实验装置简介·························································(3-4·)实验一控制系统典型环节的模拟·················(5-6)实验二一阶系统的时域响应及参数测定·····(6-7)实验三二阶系统的瞬态响应分析·················(8-9)实验四频率特性的测试·······························(9-13)实验五PID控制器的动态特性······················(13-15)实验六典型非线性环节·································(15-18)实验七控制系统的动态校正(设计性实验)··(19)备注:本实验指导书适用于自动化、电子、机设专业,各专业可以根据实验大纲选做实验。
机器人仿真与控制作业指导书

机器人仿真与控制作业指导书一、实验目的本实验旨在通过机器人仿真与控制,让学生掌握机器人控制的基本原理和操作技能,培养学生对机器人控制的兴趣和创新能力。
二、实验器材1. 仿真软件:例如V-REP(Virtual Robot Experimentation Platform)2. 机器人模型:在仿真软件中选择合适的机器人模型,如KUKA机械臂。
3. 计算机:用于运行仿真软件。
三、实验内容本次实验主要包括以下内容:1. 机器人建模与环境搭建首先,在仿真软件中选择合适的机器人模型,例如KUKA机械臂。
然后,根据实际需求,搭建机器人的工作环境,包括工作台、传感器等。
2. 机器人运动学建模根据所选机器人的结构和参数,进行机器人的正运动学和逆运动学建模。
正运动学用于根据机器人的关节角度计算末端执行器的位姿,逆运动学则用于根据末端执行器的位姿计算关节角度。
3. 控制算法设计结合实验要求,设计合适的控制算法来实现机器人的自主控制。
常用的控制算法包括PID控制、模糊控制和神经网络控制等。
4. 仿真与控制实验将控制算法应用于机器人模型,在仿真软件中进行仿真实验。
通过观察和分析仿真结果,评估控制算法的性能,并进行实验参数的优化和调整。
四、实验步骤1. 打开仿真软件,并选择合适的机器人模型。
2. 在仿真软件中建立机器人的工作环境,包括工作台和传感器等。
3. 进行机器人的运动学建模,计算机器人的正逆运动学关系。
4. 根据实验要求,设计合适的控制算法。
5. 将控制算法应用于机器人模型,并进行仿真实验。
6. 根据仿真结果,分析控制算法的性能,并进行参数优化。
7. 记录实验过程和结果,撰写实验报告。
五、实验注意事项1. 在进行仿真实验前,仔细阅读仿真软件的使用说明,熟悉软件的基本操作。
2. 在进行机器人运动学建模时,注意选择合适的坐标系和运动学参数。
3. 设计控制算法时,考虑实际应用需求,并合理选择合适的控制策略。
4. 在进行仿真实验时,及时记录和分析实验结果,不断优化控制算法。
控制系统仿真 教学大纲

控制系统仿真教学大纲控制系统仿真教学大纲控制系统仿真是现代工程领域中一项重要的技术手段,它通过构建数学模型和仿真环境,对实际控制系统进行模拟和分析。
作为一门综合性学科,控制系统仿真在工业自动化、航空航天、能源等领域都有广泛的应用。
为了培养学生的控制系统仿真能力,制定一份科学合理的教学大纲是非常必要的。
一、课程简介本课程主要介绍控制系统仿真的基本概念、原理和方法。
通过理论讲解和实践操作,使学生能够掌握仿真软件的使用技巧,了解仿真模型的建立过程,掌握仿真结果的分析与评估方法,培养学生的问题分析和解决能力。
二、教学目标1. 掌握控制系统仿真的基本概念和原理;2. 熟练使用常见的仿真软件,如MATLAB/Simulink;3. 能够建立控制系统的数学模型,并进行仿真实验;4. 能够分析仿真结果,评估系统性能,并提出改进方案;5. 培养学生的团队合作和创新思维能力。
三、教学内容1. 控制系统仿真概述a. 控制系统仿真的定义和意义b. 控制系统仿真的基本流程和方法c. 常见的仿真软件及其特点介绍2. 数学建模与仿真环境a. 控制系统的数学建模方法b. 仿真环境的选择与搭建c. 仿真模型的参数设置和输入输出分析3. 控制系统仿真实验a. PID控制器的仿真实验b. 系统辨识与模型预测控制的仿真实验c. 状态空间控制的仿真实验4. 仿真结果分析与评估a. 仿真结果的可视化分析方法b. 性能指标的计算与评估c. 仿真结果与实际系统的对比分析5. 仿真实验设计与报告撰写a. 仿真实验设计的基本原则和方法b. 仿真实验报告的撰写要点和格式规范四、教学方法1. 理论讲解:通过课堂讲解,让学生了解控制系统仿真的基本概念和原理。
2. 实验操作:通过实验操作,让学生亲自动手建立仿真模型,进行仿真实验。
3. 课堂讨论:通过课堂讨论,让学生分享仿真结果,互相学习和交流。
4. 课程设计:通过课程设计,让学生能够独立设计控制系统的仿真实验。
Simulink实验指导书
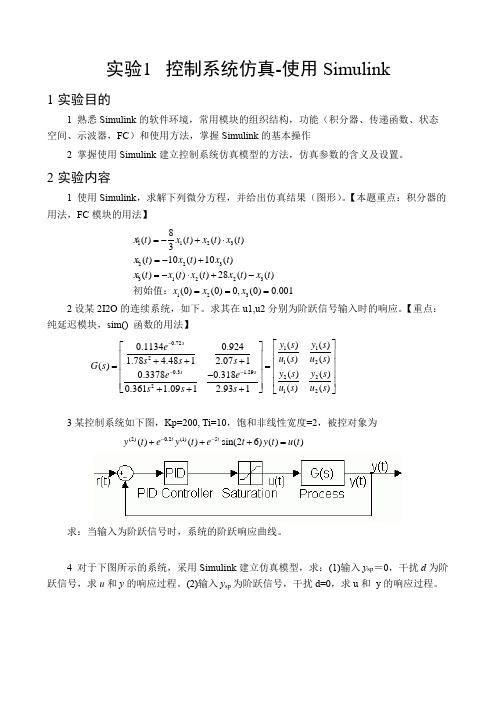
实验1 控制系统仿真-使用Simulink1 实验目的1熟悉Simulink 的软件环境,常用模块的组织结构,功能(积分器、传递函数、状态空间、示波器,FC )和使用方法,掌握Simulink 的基本操作2 掌握使用Simulink 建立控制系统仿真模型的方法,仿真参数的含义及设置。
2 实验内容1 使用Simulink ,求解下列微分方程,并给出仿真结果(图形)。
【本题重点:积分器的用法,FC 模块的用法】 1123223312231238()()()()3()10()10()()()()28()()(0)(0)0,(0)0.001x t x t x t x t xt x t x t xt x t x t x t x t x x x =-+⋅=-+=-⋅+-=== 初始值:2设某2I2O 的连续系统,如下。
求其在u1,u2分别为阶跃信号输入时的响应。
【重点:纯延迟模块,sim() 函数的用法】 0.72112120.3 1.2922212()()0.11340.924()()1.78 4.481 2.071()()()0.33780.318()()0.361 1.0912.931s ss y s y s e u s u s s s s G s y s y s e e u s u s s s s ---⎡⎤⎡⎤⎢⎥⎢⎥+++⎢⎥⎢⎥==⎢⎥-⎢⎥⎢⎥⎢⎥+++⎣⎦⎣⎦3某控制系统如下图,Kp=200, Ti=10,饱和非线性宽度=2,被控对象为 (2)0.2(1)5()()sin(26)()()t t y t e y t e t y t u t --+++=求:当输入为阶跃信号时,系统的阶跃响应曲线。
4 对于下图所示的系统,采用Simulink 建立仿真模型,求:(1)输入y sp =0,干扰d 为阶跃信号,求u 和y 的响应过程。
(2)输入y sp 为阶跃信号,干扰d=0,求u 和 y 的响应过程。
自动控制原理实验指导书
实验一典型环节及其阶跃响应一、实验目的1. 掌握控制模拟实验的基本原理和一般方法。
2. 掌握控制系统时域性能指标的测量方法。
二、实验仪器1.EL-AT-II型自动控制系统实验箱一台2.PC计算机一台三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2.时域性能指标的测量方法:超调量Ó%:1)启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2)测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
3)连接被测量典型环节的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4)在实验课题下拉菜单中选择实验一[典型环节及其阶跃响应] 。
5)鼠标单击实验课题弹出实验课题参数窗口。
在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6)利用软件上的游标测量响应曲线上的最大值和稳态值,带入下式算出超调量:YMAX - Y∞Ó%=——————×100% Y∞TP 与TS:利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态值所需的时间值,便可得到TP 与TS。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应:1.比例环节的模拟电路及其传递函数如图1-1。
1 G(S)= -R2/R12.惯性环节的模拟电路及其传递函数如图1-2。
G(S)= - K/TS+1K=R2/R1,T=R2C3.积分环节的模拟电路及传递函数如图1-3。
自动控制理论实验指导书(仿真).详解
实验一典型环节的MATLAB仿真Experiment 1 MATLAB simulation of typical link一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
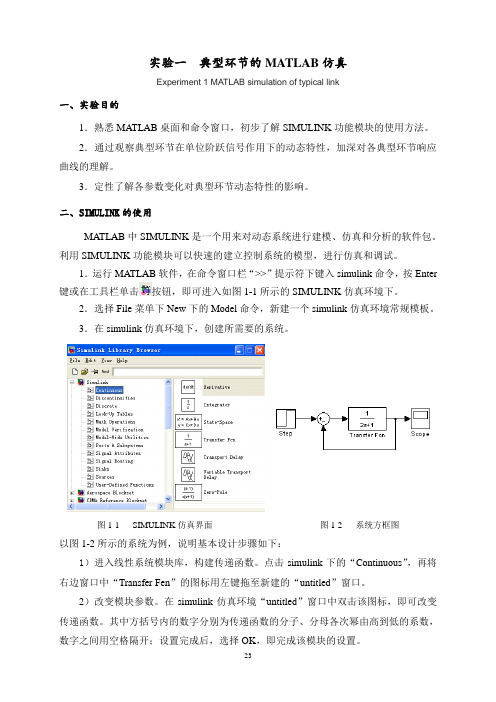
3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
过程控制系统实验指导书第二版
过程控制系统实验指导书
引言
浙江求是科教设备有限公司生产的 PCT 系列过程控制实验系统装置,可以非常好地满足过程控制 课程实验的要求。在这套设备由被控对象和控制台组成,通过手动或计算机控制,可以将被控对象 转变成不同特性的过控对象,因此,在此基础上可以进行简单的温度、压力、流量、液位的单回路 控制,而且也可以进行一系例复杂控制系统实验如:变比值控制、Simth 预估控制、解耦控制、三容 液位控制、换热器温度控制等。 一、PCT 系列过程控制实验装置特点:
《自动控制原理》实验指导书
《自动控制原理》实验指导书山西农业大学工程技术学院目录自动控制理论电子模拟实验指导书实验一、控制系统典型环节的模拟实验二、一阶系统的时域响应及参数测定实验三、二阶系统的瞬态响应分析实验四、PID控制器的动态特性实验五、典型环节频率特性的测试附录:扫频电源操作使用说明实验一 控制系统典型环节的模拟一、 实验目的1)、熟悉超低频扫描示波器的使用方法2)、掌握用运放组成控制系统典型环节的电子电路 3)、测量典型环节的阶跃响应曲线4)、通过实验了解典型环节中参数的变化对输出动态性能的影响二、 实验仪器1)、控制理论电子模拟实验箱一台 2)、超低频慢扫描示波器一台 3)、万用表一只三、 实验原理以运算放大器为核心元件,由其不同的R-C 输入网络和反馈网络组成的各种典型环节,如图1-1所示。
图中Z 1和Z 2为复数阻抗,它们都是由R 、C 构成。
基于图中A 点的电位为虚地,略去流入运放的电流,则由图1-1得:由上式可求得由下列模拟电 路组成的典型环节的传递函数及 其单位阶跃响应。
1)、比例环节比例环节的模拟电路如图1-2所示: 图1-1、运放的反馈连接(1) )(12Z Z u u S G i o =-=2=410820==12KKZ Z )S (G)(2 1+=1+1•=R 1+==21212212TS KCS R R R CS /R CS/R Z Z )S (G图1-2 比例环节2)、惯性环节取参考值R 1=100K ,R 2=100K ,C=1uF图1-3、惯性环节3)、积分环节取参考值R =200K ,C =1uF图1-4、积分环节)(3 11/1)(12TSRCS R CSZ Z S G ==== RC =T 积分时间常数式中4)、比例微分环节(PD ),其接线图如图及阶跃响应如图1-5所示。
参考值R 1=200K ,R 2=410K ,C =0.1uF图1-5 比例微分环节5)、比例积分环节,其接线图单位阶跃响应如图1-6所示。
过程控制系统实验指导书

过程控制系统实验指导书实验一:基本的过程控制系统概念实验目的:1. 了解过程控制系统的基本概念和结构;2. 掌握过程控制系统中的传感器和执行器的作用和应用方法;3. 学会使用PLC进行基本的控制。
实验原理:过程控制系统的主要功能是对系统中的各种变量进行测量和控制。
通常包括传感器、执行器和控制器三个部分。
传感器负责采集过程变量的数值,执行器负责对控制对象进行控制,控制器负责数据的处理和算法的实现。
传感器主要用于测量过程中的各种参数,如温度、压力、流量等,把这些参数转化为电信号,通过信号传输到控制器进行处理。
传感器的种类繁多,能够根据测量范围、精度、稳定性等不同要求选用不同传感器。
执行器主要用于对控制对象进行控制,例如控制阀门的开闭、启动或停止泵等。
执行器的种类也很多,根据不同的控制需求,需要选择不同的执行器。
控制器是整个系统的中枢部分,主要负责调节和控制传感器和执行器之间的信号和数据。
控制器一般采用计算机和程序控制器,通过不断的接收、处理、输出数据,实现对控制对象的实时监控和控制。
在本实验中,我们将使用PLC进行控制,PLC是工业控制中最为常见的控制器之一,其硬件和软件具有可编程性、可扩展性等优点,可实现较复杂的控制功能。
实验步骤:1. PLC硬件结构的讲解与认识我们首先要理解PLC的硬件结构,如输入模块、输出模块、中央处理器(CPU)和编程接口等部分。
其中输入模块、输出模块用于将模拟量或数字量的信号转化为PLC识别的信号,在输出时将PLC的信号。
通过CPU控制,实现对各种执行器的控制。
编程接口是一个开发平台,具有图形设计和文字描述的功能,对于初学者来说非常简单实用。
2. 了解信号的类型及其转换方法为了实现对过程的监控和控制,我们需要测量过程参数,并将其转化为PLC可以识别的信号。
我们需要了解信号的类型及其转换方法。
通常包括电压、电流、频率、数字信号等类型。
我们可以使用一些基本的传感器,如温度传感器、压力传感器等,将它们的数值转化为电信号,并通过输入模块输入PLC。
过程控制仿真系统实验指导书
目录前言 (3)第一章对象特性测试实验 (4)第一节测试对象特性的方法 (4)实验一上水箱特性测试实验 (14)实验二下水箱特性测试实验 (15)实验三二阶液位特性测试实验 (16)实验四温度加热器特性测试实验 (17)实验五调节阀特性测试实验 (18)第二章单闭环控制系统实验 (19)实验一压力单闭环控制系统实验 (22)实验二温度单闭环控制系统实验 (23)实验三液位单闭环控制系统实验 (24)实验四流量单闭环控制系统实验 (25)实验五二阶液位控制系统实验 (26)第三章串级控制系统实验 (27)串级控制系统的设计与整定 (27)实验一上水箱液位和流量串级控制系统实验 (30)实验二上、下水箱液位串级控制系统实验 (32)第四章前馈控制系统实验 (34)前馈控制系统的原理 (34)实验一前馈反馈控制系统实验 (35)前言过程控制模拟仿真系统是通过计算机仿真技术,将各种过程物理对象转换成数学模型,开发出对象的一阶和二阶过程的动态特性数学模型,计算机动态模拟,达到和真实的控制系统相一致的仿真目的,在教学实验应用方面具有很好的效果。
在仿真系统界面中,设置有各种过程控制器件,包括变频器、水泵、电动调节阀、压力变送器、温度变送器、液位变送器、流量变送器、加热器等。
管道设置为两条回路,主回路用红色管道表示,副回路用白色管道表示,管道为动态流水显示。
在系统运行状态下,只要打开流水管道,就会观察到动态流水过程,比较形象直观。
同时,在各个器件上方的动态文本里显示的是当前的实际值,水箱上标有液位刻度,可以直观的观察液位高度。
系统最右上方一栏显示的是各器件变送的电流值,变送输出电流为标准电流4~20mA,右下方的为输入控制电流,是用来控制调节阀,加热器,变频器,输入电流为标准4~20mA。
该仿真系统将计算机内部变送电流数值通过牛顿模块输出为实际的电流值,而实际控制模拟输入电流又可通过牛顿模块转换为数字信号输入到计算机内。
广东工业大学《自动控制原理》MATLAB仿真实验指导书

⼴东⼯业⼤学《⾃动控制原理》MATLAB仿真实验指导书⾃动控制原理MATLAB仿真实验指导书李明编写⼴东⼯业⼤学⾃动化学院⾃动控制系⼆〇⼀四年九⽉实验项⽬名称:实验⼀线性系统的时域响应实验项⽬性质:MATLAB仿真实验所属课程名称:⾃动控制原理实验计划学时:2学时⼀、实验⽬的1.熟悉控制系统MATLAB仿真的实验环境。
2.掌握使⽤MATLAB进⾏系统时域分析的⽅法,研究⼀阶系统和⼆阶系统的时域响应特性。
⼆、实验环境装有MATLAB6.5或以上版本的PC机⼀台。
三、实验内容和要求1.了解和掌握MATLAB中传递函数表达式及输出时域函数表达式。
2.利⽤MATALB观察和分析⼀阶系统的阶跃响应曲线,了解⼀阶系统的参数:时间常数对⼀阶系统动态特性的影响。
3.掌握典型⼆阶系统模拟电路的构成⽅法;研究⼆阶系统运动规律。
研究其重要参数:阻尼⽐对系统动态特性的影响,分析与超调量%、过渡过程时t的关系。
间s四、实验⽅法1.MATLAB中建⽴传递函数模型的相关函数(1)有理分式降幂排列形式: tf()(2)零极点增益模型: zpk()(3)传递函数的连接⽅式: series(), parallel(), feedback()2.MATLAB中分析系统稳定性的相关函数(1)利⽤pzmap()绘制连续系统的零极点图;(2)利⽤roots()求分母多项式的根来确定系统的极点3.MATLAB中分析线性系统的时域响应的相关函数(1)⽣成特定的激励信号的函数gensig( )(2) LTI 模型任意输⼊的响应函数lsim( ) (3) LTI 模型的单位冲激响应函数impulse( ) (4) LTI 模型的阶跃响应函数step( )五、实验步骤1. 线性系统的稳定性分析(1) 若线性系统的闭环传递函数为225()425G s ss,试绘制其零极点分布图,并据此判断系统的稳定性。
(2) 若线性系统的闭环传递函数为229(0.21)()( 1.29)s s G s s s s ,求出该闭环传递函数的所有极点,并据此判断系统的稳定性。
MATLAB与控制系统仿真实验指导书
《MATLAB与控制系统仿真》实验指导书(2011年第一版)西安邮电学院自动化学院2011年6月目录前言 (1)MATLAB语言实验项目 (3)实验一熟悉MATLAB集成环境与基础运算 (3)实验二 MATLAB的基本计算 (7)实验三 MATLAB图形系统 (9)实验四 MATLAB程序设计 (13)实验五 MATLAB函数文件 (15)实验六MATLAB数据处理与多项式计算 (17)实验七 SIMULINK仿真实验 (21)前言MATLAB 产品家族是美国 MathWorks公司开发的用于概念设计、算法开发、建模仿真、实时实现的理想的集成环境。
是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和SIMULINK两大部分。
MATLAB由于其完整的专业体系和先进的设计开发思路,使得 MATLAB 在多种领域都有广阔的应用空间,特别是在科学计算、建模仿真以及系统工程的设计开发上已经成为行业内的首选设计工具,它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
MATLAB软件工具在自动化专业、测控技术与仪器和电气工程及其自动化等专业的本科生学习中,经常用来计算、仿真和设计,尤其是MATLAB软件的仿真功能,能使学生对所学知识有更加深入的理解和分析。
《MATLAB与控制系统仿真》课程,和《自动控制原理》、《现代控制理论》、《数字信号处理》、《电力电子技术》等重要的专业课程相互支撑、相辅相成,同时也有利于学生完成课程设计和毕业设计等实践教学环节。
自动控制原理MATLAB仿真实验指导书(4个实验)
自动控制原理MATLAB仿真实验实验指导书电子信息工程教研室实验一典型环节的MA TLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MA TLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
《智能控制》实验指导书

《智能控制》实验指导书通过对智能控制系统的仿真实验,加深对智能控制原理的理解,并且学习和掌握智能控制的实现方法。
实验一 控制系统的基本结构仿真实验目的:建立智能控制研究的实验环境。
实验要求:1. 对单输入-单输出反馈控制系统(如图一),进行结构仿真。
图1 控制系统的基本结构(1) 被控对象的数学模型0G (s) = )1)(1(21s++-s T s T Ke τ ,(K 、1T 、2T 、τ>0) (2) 控制器包括:PID 控制器、专家系统控制器、模糊控制器、仿人智能控制器。
2. 建立友好的人-机接口(1) 对于被控对象参数可以通过人-机界面设置和修改。
(2) 对于各种控制器可以通过人-机界面选择,并设置该控制器的控制参数。
(3) 通过人-机界面可显示系统的响应曲线。
实验二 PID 控制的设计与实现实验目的:掌握PID 控制的实现方法和系统整定方法,了解PID 控制的鲁棒性。
实验要求:1. 设计并实现PID 控制器。
2. 设被控对象参数为:K=2、1T =1、2T =2.5、τ=0.6;要求单位阶跃响应指标:超调量σ%≤10%,调节时间s t ≤10秒;试对系统进行整定,给出实验结果:(1) 控制器参数:p K 、i K 、d K 及采样时间T ;(2) 系统实际的性能指标:σ%、s t ;(3) 系统的单位阶跃响应曲线y(t);3. 保持控制器所有控制参数不变,只改变被控对象的纯时延τ,检验系统的鲁棒性(对τ变化的适应能力)。
(1) τ=1.2时,运行系统。
给出系统的单位阶跃响应曲线,并计算响应的系统性能指标σ%、s t 。
(2) τ=1.8时,运行系统。
给出系统的单位阶跃响应曲线,并计算响应的系统性能指标σ%、s t 。
实验三 专家系统控制的设计与实现实验目的:掌握专家系统控制的原理和实现方法,了解专家系统控制的鲁棒性。
实验要求:1. 可以采用直接专家系统控制或间接专家系统控制。
说明所采用的专家系统控制原理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 MATLAB 软件操作练习一、 实验目的1. 熟悉MATLAB 软件的基本操作;2. 学会利用MATLAB 进行基本数学计算的方法;3. 学会用MATLAB 进行矩阵创建和运算。
二、实验设备计算机一台,MATLAB 软件三、实验内容1. 使用help 命令,查找 sqrt (开方)、roots (求根)等函数的使用方法;2. 用MATLAB 可以识别的格式输入以下矩阵7535008334100910315037193......A ⎡⎤⎢⎥⎢⎥=⎢⎥-⎢⎥⎣⎦并将A 矩阵的右下角2×3子矩阵赋给D 矩阵。
赋值完成后,调用相应的命令查看MATLAB 工作空间的占用情况。
3. 矩阵运算 (1)矩阵的乘法已知A=[1 2;3 4]; B=[5 5;7 8]; 求A^2*B (2)矩阵除法已知 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; A\B,A/B(3)矩阵的转置及共轭转置 已知A=[5+i,2-i,1;6*i,4,9-i]; 求A.', A'(4)使用冒号选出指定元素 已知: A=[3 2 3;2 4 6;6 8 10];求A 中第3列前2个元素;A 中所有列第2,3行的元素; 4. 分别用for 和while 循环结构编写程序,求出632362632122222ii K ===++++++∑并考虑一种避免循环的简洁方法来进行求和。
四、实验步骤1. 熟悉MATLAB 的工作环境,包括各菜单项、工具栏以及指令窗口、工作空间窗口、启动平台窗口、命令历史窗口、图形文件窗口和M 文件窗口;2. 在指令窗口中完成实验内容中规定操作并记录相关实验结果; 3. 完成实验报告。
实验二 M 文件编程及图形处理一、实验目的1.学会编写MATLAB 的M 文件; 2.熟悉MATLAB 程序设计的基本方法; 3. 学会利用MATLAB 绘制二维图形。
二、实验设备计算机一台,MATLAB 软件三、实验内容1. 选择合适的步距绘制出下面的图形 (1)sin(tan )tan(sin )t t -,其中(,)t ππ∈- (2)-0.5t y=e sin (t-)3π,t ∈[0,20](3)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5), t ∈[0,2π]2.基本绘图控制绘制[0,4π]区间上的x1=10sint 曲线,并要求: (1)线形为点划线、颜色为红色、数据点标记为加号; (2)给横坐标标注’t ’,纵坐标标注‘y(t)‘, 3.M 文件程序设计(1)编写程序,计算1+3+5+7+…+(2n+1)的值(用input 语句输入n 值); (2)编写分段函数⎪⎩⎪⎨⎧≤≤-<≤=其它021210)(x xx x x f的函数文件,存放于文件ff.m 中,计算出)2(f ,)3(-f 的值四、实验要求1. 预习实验内容,按实验要求编写好实验程序;2. 上机调试程序,记录相关实验数据和曲线,3. 完成实验报告。
实验三 数学模型建立与转换一、实验目的1.学会用MATLAB 建立控制系统的数学模型。
2.学会用MATLAB 对控制系统的不同形式的数学模型之间的转换和连接。
二、实验设备计算机一台,MATLAB 软件三、实验内容1.建立控制系统的数学模型(1)用MATLAB 建立下述零极点形式的传递函数类型的数学模型:)1)(1(3)(+++=s s s s G(2)用MATLAB 建立下述线性连续时间系统的状态方程类型的数学模型:ux x B A +=.ux y D C +=式中,⎥⎦⎤⎢⎣⎡=....321x x x x ,,,[]321x x x x ,,=,[]21u u u ,=,[]21y y y ,=,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=987654321A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=642531B ,⎥⎦⎤⎢⎣⎡=654321C ,⎥⎦⎤⎢⎣⎡=4321D2.不同形式及不同类型间的数学模型的相互转换(1)分子、分母多项式形式的传递函数模型与零极点形式的传递函数模型间的相互转换;1)用MATLAB 将下列分子、分母多项式形式的传递函数模型转换为零极点形式的传递函数模型:2)用MATLAB 将下列零极点形式的传递函数模型转换为分子、分母多项式形式的传递函数模型:22642202412)(23423++++++=s s s s s s s G )43)(43)(2)(1()5)(6()(j s j s s s s s s s G -+++++++=(2)分子、分母多项式形式的传递函数模型与状态方程模型间的相互转换1)用MATLAB 将下列分子、分母多项式形式的传递函数模型转换为状态方程模型:123)(3+++=s s s s G2)用MATLAB 将下列状态方程模型转换为分子、分母多项式形式的传递函数模型:(3)零极点形式的传递函数模型与状态方程模型间的相互转换 1)用MATLAB 将下列零极点形式的传递函数模型转换为状态方程模型)1)(1(3)(+++=s s s s G2)用MATLAB 将下列状态方程模型转换为零极点形式的传递函数模型3. 用MATLAB 命令求如下图2.1所示控制系统的闭环传递函数图2.1 四、实验要求预习实验内容,按实验要求编写好实验程序,调试程序,记录相关实验数据和曲线,并撰写实验报告。
[]ux y u x x +=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=31102110x y u x x⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2281200012242641413125119748612310961实验四 控制系统响应及性能分析一 、实验目的1. 掌握控制系统频率特性曲线绘制方法。
2. 学会用MATLAB 绘制控制系统的根轨迹。
3. 学习控制系统动态响应曲线的绘制及动态性能指标的测试方法二、实验设备计算机一台,MATLAB 软件三、实验内容1. 已知系统的开环传递函数为:s s s s s G o 4036820)(234+++=求系统在单位负反馈下的阶跃响应曲线。
2. 系统开环传递函数如下:22(24)()(4)(6)( 1.41)r K s s G s s s s s s ++=++++要求绘制系统根轨迹并进行系统分析。
①在MATLAB 环境下输入程序num=[1 2 4];den=conv([1 0],conv([1 4],conv([1 6],[1 1.4 1]))); rlocus(num,den)绘制出系统的根轨迹图 ②输入命令 rlocfind(num,den)移动鼠标,确定系统变为不稳定时的k 值。
3. 系统结构图如图2.2所示,试用nyquist 频率曲线判断系统的稳定性。
如果系统稳定,求出系统稳定裕度。
并绘制系统的单位冲激响应以验证判断结论。
图2.2其中)10625.0)(125.0)(185.0(7.16)(+++=s s s ss G四、实验要求1.预习实验内容,按实验要求编写好实验程序,调试程序; 2.根据控制系统的响应曲线,分析系统的性能; 3.记录相关实验数据和曲线,并撰写实验报告。
实验五 控制系统综合一、实验目的(1). 学习校正装置的设计和实现方法。
(2).掌握MATLAB 进行控制系统设计的基本方法二、实验设备计算机一台,MATLAB 软件三、实验内容设被控对象的传递函数为:10()(5)o G s s s =+设计方案,满足下列设计要求:。
1. 串联超前校正参考程序: ng=10; dg=[1,5,0]; G0=tf(ng,dg); kc=10; dPm=70+10;[mag,phase,w]=bode(G0*kc); Mag=20*log10(mag);[Gm,Pm,Wcg,Wcp]=margin(G0*kc); phi=(dPm-Pm)*pi/180;alpha=(1+sin(phi))/(1-sin(phi)); Mn=-10*log10(alpha); Wcgn=spline(Mag,w,Mn); T=1/Wcgn/sqrt(alpha); Tz=alpha*T;Gc=tf([Tz 1],[T 1]);bode(G0*kc,G0*kc*Gc);[Gm1,Pm1,Wcg1,Wcp1]=margin(G0*kc*Gc);2.串联滞后校正参考程序:clearclcclosenum=100;den=[1 5 0];[gm,pm,wcg,wcp]=margin(num,den);dpm=-180+70+12;[mag,phase,w]=bode(num,den);wc=spline(phase,w,dpm);magg=20*log10(mag);mm=spline(w,magg,wc);beta=10^(-mm/20);w2=0.2*wc;t=1/(beta*w2);num1=[beta*t,1];den1=[t,1];gc=tf(num1,den1);h=tf(num,den);g=h*gc;[gm1,pm1,wcg1,wcp1]=margin(g);bode(g,'y')hold onbode(h,'r')hold offpm1四.实验要求1.本实验属于设计性实验,根据实验内容选择设计方案,如串联校正,PID 控制等;2.按实验要求编写好实验程序,调试程序,得到校正前和校正后的BODE图;3.记录相关数据和曲线,并撰写实验报告。
实验六 simulink 仿真一、实验目的1.掌握SIMULINK软件的基本内容及仿真方法。
2.熟悉实际系统动态结构图的建立方法。
二、实验设备计算机一台,MATLAB软件三、实验内容1. 利用SIMULINK建立如图2.3所示模型进行时域系统分析,选择合适的增益k使系统跟踪输入给定信号。
图2.32. 建立如图2.4所示的典型PID控制位置随动系统模型,选择阶跃输入模块.用示波器观察系统的仿真输出。
并对Kp、Ki、Kd参数进行调整,使系统具有较满意的动态性能。
①打开各相应函数库,建立如图3所示的PID控制系统的结构图程序文件;②打开各元件参数设置窗口,输入各参数。
先取Kp=5,Ki=0.5,Kd=1;③打开simulation菜单,选择Parameter项,设定适当的仿真参数;④启动仿真,观察响应的动态特性;⑤调整Kp、Ki、Kd参数,使得系统具有较满意的动态性能。
四、实验要求1.SIMULINK环境下建立系统的仿真模型,调节实验参数,获得满意的响应曲线;2.记录相关数据、模型和曲线,并撰写实验报告。