2020机器人技术等级考试六级课程第八章02小车运动 机器人包老师
跟着包老师学机器人四级 机器人考级Arduino智能小车 机器人小车的红外避障 蚂雅令科技玩得趣
跟着包老师学机器人四级机器人考级Arduino智能小车机器人小车的红外避障蚂雅令科技玩得趣/*****************************************************程序码农:机器人包老师程序名称:RDrobot-car-LED程序功能:测试机器人小车的红外避障机器人小车版本:RDrobot-car-ver3.1*****************************************************/#define motor_left_positive A0 //控制左电机的输入端+#define motor_left_negative A1 //控制左电机的输入端-#define motor_right_positive A2 //控制右电机的输入端+#define motor_right_negative A3 //控制右电机的输入端-int ir_sensor_right = 2; //右侧红外传感器接口,无障碍物输出高电平,有障碍物输出低电平int ir_sensor_left = 3; //左侧红外传感器接口,无障碍物输出高电平,有障碍物输出低电平void setup() {//初始化电机相关接口pinMode(motor_left_positive OUTPUT); //控制左电机的输入端+设为输出pinMode(motor_left_negative OUTPUT); //控制左电机的输入端-设为输出pinMode(motor_right_positive OUTPUT); //控制右电机的输入端+设为输出pinMode(motor_right_negative OUTPUT); //控制右电机的输入端-设为输出//初始化红外相关接口pinMode(ir_sensor_rightINPUT_PULLUP); //设置为输入口,带内部上拉电阻,抗干扰能力更强pinMode(ir_sensor_left INPUT_PULLUP); //设置为输入口,带内部上拉电阻,抗干扰能力更强}void loop() {// put your main code here to run repeatedly:if ((digitalRead(ir_sensor_right) == 1)&& (digitalRead(ir_sensor_left) == 1)) //右前方左前方均无障碍物{moveForward(); //机器人小车继续前行}if ((digitalRead(ir_sensor_right) == 0)&& (digitalRead(ir_sensor_left) == 1)) //右前方检测到障碍物{moveBackward(); //机器人小车后退delay(500);moveLeft(); //机器人小车左转delay(600);moveStop(); //机器人小车停止左转moveForward(); //机器人小车继续前行}if ((digitalRead(ir_sensor_right) == 1)&& (digitalRead(ir_sensor_left) == 0)) //左前方检测到障碍物{moveBackward(); //机器人小车后退delay(500);moveRight(); //机器人小车右转delay(600);moveStop(); //机器人小车停止右转moveForward(); //机器人小车继续前行}if ((digitalRead(ir_sensor_right) == 0)&& (digitalRead(ir_sensor_left) == 0)) //左前方和右前方同时检测到障碍物{moveBackward(); //机器人小车后退delay(2000); //此处后退时间较长moveRight(); //机器人小车右转delay(600);moveStop(); //机器人小车停止右转moveForward(); //机器人小车继续前行}}/******************************************函数名称:void moveForward()函数功能:左右电机均正转,机器人小车前进*****************************************/void moveForward(){//注意要先将电机控制相关口设置为输出digitalWrite(motor_left_positive HIGH); //左电机控制输入端+设置为高电平 digitalWrite(motor_left_negative LOW); //左电机控制输入端-设置为低电平 digitalWrite(motor_right_positive HIGH); //右电机控制输入端+设置为高电平 digitalWrite(motor_right_negative LOW); //右电机控制输入端-设置为低电平}/******************************************函数名称:void moveBackward()函数功能:左右电机均反转,机器人小车后退*****************************************/void moveBackward(){//注意要先将电机控制相关口设置为输出digitalWrite(motor_left_positive LOW); //左电机控制输入端+设置为低电平 digitalWrite(motor_left_negative HIGH); //左电机控制输入端-设置为高电平 digitalWrite(motor_right_positive LOW); //右电机控制输入端+设置为低电平 digitalWrite(motor_right_negative HIGH); //右电机控制输入端-设置为高电平}/******************************************函数名称:void moveLeft()函数功能:左电机不转,右电机正转,机器人小车左转*****************************************/void moveLeft(){//注意要先将电机控制相关口设置为输出digitalWrite(motor_left_positive HIGH); //左电机控制输入端+设置为高电平 digitalWrite(motor_left_negative HIGH); //左电机控制输入端-设置为高电平 digitalWrite(motor_right_positive HIGH); //右电机控制输入端+设置为高电平 digitalWrite(motor_right_negative LOW); //右电机控制输入端-设置为低电平}/******************************************函数名称:void moveRight()函数功能:左电机正转,右电机不转,机器人小车左转*****************************************/void moveRight(){//注意要先将电机控制相关口设置为输出digitalWrite(motor_left_positive HIGH); //左电机控制输入端+设置为高电平 digitalWrite(motor_left_negative LOW); //左电机控制输入端-设置为低电平 digitalWrite(motor_right_positive HIGH); //右电机控制输入端+设置为高电平 digitalWrite(motor_right_negative HIGH); //右电机控制输入端-设置为高电平}/******************************************函数名称:void moveStop()函数功能:左右电机均不转,机器人小车停车*****************************************/void moveStop(){//注意要先将电机控制相关口设置为输出digitalWrite(motor_left_positive HIGH); //左电机控制输入端+设置为高电平 digitalWrite(motor_left_negative HIGH); //左电机控制输入端-设置为高电平 digitalWrite(motor_right_positive HIGH); //右电机控制输入端+设置为高电平 digitalWrite(motor_right_negative HIGH); //右电机控制输入端-设置为高电平}。
2020年12月(二级)青少年机器人技术等级考试理论综合试卷
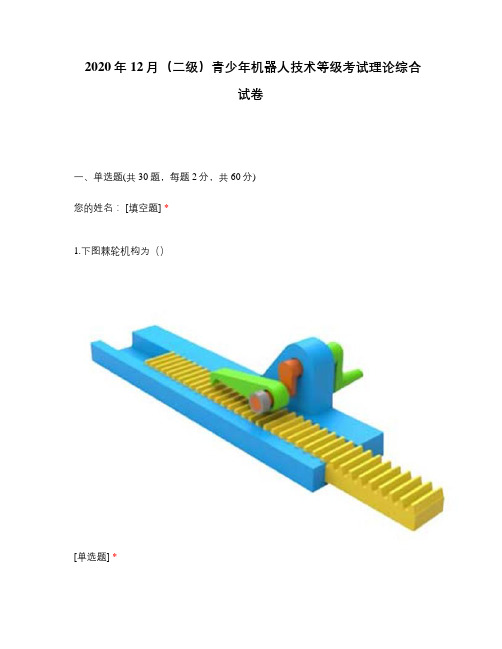
2020年12月(二级)青少年机器人技术等级考试理论综合试卷一、单选题(共30题,每题2分,共60分)您的姓名: [填空题] *_________________________________1.下图棘轮机构为()[单选题] *A. 摩擦式棘轮机构B. 内啮合棘轮机构C. 双动式棘轮机构D. 齿式棘轮机构(正确答案)答案解析:图中有齿轮以及棘爪,是齿式棘轮机构的拓展;棘轮机构按照棘轮形状分为摩擦式棘轮和齿式棘轮;2.如下图该机械结构可实现哪种运动方式()[单选题] *A. 往复摆动B. 单向持续转动C. 单向间歇性运动(正确答案)D. 双向持续转动答案解析:图中是棘轮机构,棘轮机构的特点是单向间歇性运动;3.关于下图机械结构,以下说法错误的是()[单选题] *A. AB为摇杆(正确答案)B. BC为连杆C. CD做反复摆动运动D. AD为机架试题答案解析:图中所示为曲柄摇杆机构;曲柄摇杆的组成为曲柄和摇杆,曲柄是圆周运动,摇杆是反复摆动;故选A;4.等人制造的木构水运仪象台是当时世界上最先进的天文钟() [单选题] *A. 北宋时期苏颂(正确答案)B. 春秋时期鲁班C. 春秋时期墨子D. 三国时期诸葛亮答案解析:北宋时期5.以下传动方式可以实现异面传动的是() [单选题] *A. 链传动B. 皮带传动(正确答案)C. 齿轮传动、链传动传动均可D. 链传动、皮带传动均可答案解析:C齿轮传动中的冠齿轮可实现异面传动;B皮带传动可以不在一个平面内传动;6.下图机构为()[单选题] *A. 外啮合齿式棘轮机构B. 内啮合齿式棘轮机构(正确答案)C. 外啮合摩擦式棘轮机构D. 内啮合摩擦式棘轮机构答案解析:图中机构为内啮合齿式棘轮机构;齿式棘轮机构分为外啮合和内啮合两类;7.对于图中机构说法正确的是()[单选题] *A. 这是尖顶从动件盘形凸轮机构(正确答案)B. 这是滚子从动件盘形凸轮机构C. 这是平底从动件盘形凸轮机构D. 这不是凸轮机构试题答案解析:图中机构是凸轮机构,所以D选项错误;是尖顶从动件盘形机构;8.凸轮机构按照从动件形状分类不包括() [单选题] *A. 平底从动件B. 尖顶从动件C. 滚子从动件D. 扇形从动件试题(正确答案)答案解析:凸轮机构按照从动件分为平底从动件、尖顶从动件和滚子从动件;9.若四杆机构中最短杆与最长杆长度之和小于等于其余两杆长度之和,不能构成()[单选题] *A. 双摇杆机构B. 双曲柄机构C. 曲柄摇杆机构D. 曲柄滑块机构(正确答案)答案解析:;D选项曲柄滑块机构不属于平面四连杆机构;10.关于电流、电压不正确的是() [单选题] *A. 电流的单位为安培B. 中国家用电压为330V(正确答案)C. 电压的单位为伏特D. 人体安全电压是36V以下试题答案解析:中国家用电压为220V11.飞机起飞时,下列说法错误的是() [单选题] *A. 机翼上侧气流速度快B. 机翼上侧曲线弧度大于下侧C. 机翼上侧气压低D. 机翼上侧采用的金属材料更重试题(正确答案)答案解析:D选项,机翼上的材料应该更轻;12.以下哪个与其它三个不属于一种分类方式() [单选题] *A. 重力锁合凸轮机构B. 弹力锁合凸轮机构C. 几何锁合凸轮机构D. 盘形凸轮机构试题(正确答案)答案解析:D盘形凸轮机构属于凸轮按外形分类的;13.如下图所示小玩具,该玩具采用了哪种机械结构()[单选题] *A. 连杆机构B. 凸轮机构(正确答案)C. 棘轮机构D. 齿轮试题答案解析:图中所示满足凸轮机构的特点;14.关于“伯努利定理”不正确的是() [单选题] *A. 适用于空气B. 适用于液体C. 流体速度加快时,物体与流体接触的界面上的压力会减小,D. 流体速度加快时,物体与流体接触的界面上的压力会增大,试题(正确答案)答案解析:伯努利定律适用于空气;15.下图棘轮机构中,②号是()[单选题] *A. 棘轮B. 摆杆C. 棘爪(正确答案)D. 机架试题答案解析:图中为棘轮机构;棘轮机构的组成有棘轮、主动棘爪、止回棘爪、主动摆杆四个组成部分;16.关于曲柄摇杆机构,以下说法正确的是() [单选题] *A. 当摇杆作为主动件(输入件),圆周运动转化为往复摆动B. 曲柄摇杆机构是高副机构C. 曲柄摇杆机构是凸轮机构D. 曲柄摇杆机构是铰链四杆机构试题(正确答案)答案解析:A选项正确,主动件与从动件可以相互转化;D曲柄摇杆不是四杆机构;17.下列不会产生伯努利效应的是() [单选题] *A. 两张纸之间吹气B. 飞机升降C. 地铁进站D. 用滑雪板滑雪试题(正确答案)答案解析:伯努利效应是两张纸之间吹气实验;18.以下机构属于低副机构的是() [单选题] *A. 摩擦式凸轮机构B. 棘轮机构C. 不完全齿轮机构D. 连杆机构试题(正确答案)答案解析:低副机构是面接触,精准度不高,选D;19.关乎皮带交叉传动以下说法正确的是() [单选题] *A. 带轮两侧的皮带接近平行B. 两带轮转向相反(正确答案)C. 带轮转向关系不能确定D. 是指带轮旋转中心轴交叉试题答案解析:皮带交叉传动,两轮转向相反;皮带平行传动,两轮转向相同;20.关于曲柄滑块机构与曲柄摇杆机构的说法正确的是() [单选题] *A. 曲柄滑块机构主动件为曲柄B. 曲柄滑块机构主动件为滑块C. 都能实现圆周运动和往复运动的相互转化(正确答案)D. 曲柄滑块机构为平面四杆机构,曲柄摇杆机构不是平面四杆机构答案解析:C选项,曲柄摇杆机构不是往复运动;21.尖顶从动件盘形凸轮机构的特点不包括() [单选题] *A. 能与任意复杂的凸轮轮廓保持接触B. 尖端处摩擦大C. 极易磨损D. 能应用在传力较大的高速机构上(正确答案)答案解析:尖顶从动件属于高副机构;特点不能应用在传力较大的高速机构;22.1966年,人工智能研究中心发明了谢克机器人(ShakeTheRobot),它是第一台移动机器人() [单选题] *A. 牛津大学B. 哈佛大学C. 斯坦福大学(正确答案)D. 麻省理工学院试题答案解析:斯坦福大学发明谢克机器人,是第一台移动机器人;23.以下是后驱车缺点的是() [单选题] *A. 转弯半径较大B. 加速性差C. 重心分布不均匀D. 价格较高试题(正确答案)答案解析:后驱车的缺点是价格高;ABC为前驱车特点;24.两个物体互相接触并具有相对运动趋势,但仍处于静止状态,在接触面会产生哪种摩擦力() [单选题] *A. 静摩擦力(正确答案)B. 滚动摩擦力C. 滑动摩擦力D. 不产生摩擦力试题答案解析:两物体有相对运动的趋势,属于静摩擦力,选A;25.以下是前驱车优点的是() [单选题] *A. 不会产生扭矩转向问题B. 零部件少,成本低(正确答案)C. 加速性能好D. 重量分布更加均匀试题答案解析:前驱车的优点就是成本低;ACD为后驱车的优点;26.如下图所示皮带传动,小皮带轮端接电机,以下说法正确的是()[单选题] *A. 主动轮和从动轮转动方向相反B. 主动轮和从动轮的转动方向相同(正确答案)C. 从动轮的转速大于主动轮的转速D. 这是皮带交叉传动试题答案解析:图中为平行皮带传动,两皮带轮转向相同,从动轮转速小于主动轮转速;B选项说法正确;27.如图,某凸轮机构采用了下列凸轮,说法正确的是()[单选题] *A. 它是槽凸轮机构(正确答案)B. 它是重力锁合凸轮机构C. 它这是弹力锁合凸轮机构D. 它是共轭凸轮机构试题答案解析:图中是槽式凸轮机构,属于几何锁合凸轮机构;28.汽车的轮胎上都有花纹,主要是为了() [单选题] *A. 增大摩擦力(正确答案)B. 美观C. 降低成本D. 减轻重量试题答案解析:轮胎中的花纹是为了增加摩擦力,防止行驶过程中打滑;29.与带传动相比较,齿轮传动的缺点是什么() [单选题] *A. 无法准确传递动力B. 承载能力小C. 传动效率低D. 不适合远距离传动试题(正确答案)答案解析:齿轮传动不能远距离传动,但是传动较为精准;30.1948年诺伯特维纳出版了《控制论》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的, [单选题] *A. 自动化工厂(正确答案)B. 自动行驶汽车C. 智能机器人D. 互联网技术试题答案解析:诺伯特的控制论,阐述控制机可以实现自动化;把控制论看作是一门研究机器、生命社会中控制和通讯的一般规律的科学;二、多选题(共5题,每题4分,共20分)31.单位面积下物体所受的压力相当于压强,那么增大压强的方法有哪些() *A. 在受力面积不变的情况下,增加压力,(正确答案)B. 在受力面积不变的情况下,减少压力,C. 压力不变的情况下,减小受力面积,(正确答案)D. 压力不变的情况下,增大受力面积答案解析:面积不变,重力越大,压力越强;重力不变,面积越小,压力越强;32.以下哪些不是双摇杆机构的动作特征() *A. 左右两杆做圆周运动(正确答案)B. 当左侧杆做圆周运动时,右侧杆做摇摆运动(正确答案)C. 当左侧杆做摇摆运动时,右侧杆做圆周运动(正确答案)D. 左右两杆都做摇摆运动答案解析:A选项,左右两杆做左右摆动;BC选项,讲的是曲柄摇杆运动;33.凸轮机构的优点有哪些() *A. 结构简单(正确答案)B. 结构紧凑(正确答案)C. 不易磨损D. 凸轮轮廓加工容易答案解析:凸轮机构属于高副机构,易磨损;凸轮机构加工复杂;34.以下是皮带传动优点的是() *A. 可实现远距离传动(正确答案)B. 可以精确传递动力C. 可保护机械(正确答案)D. 比较适合近距离传动,传动力大答案解析:皮带传动适合远距离传动、可以有一定的保护作用;选AC;35.努力向上推动静止在斜面上的物体,但物体仍未移动,下列哪些属于物体所受的力() *A. 重力(正确答案)B. 滑动摩擦力C. 推力(正确答案)D. 支持力(正确答案)答案解析:推不动的物体是摩擦力大于推力;物体有自身的重力、推力、地面的支持力;三、判断题(共10题,每题2分,共20分)36.皮带传动装置动力传递会产生延迟 [判断题] *对(正确答案)错答案解析:皮带传动装置的精准度不高,适合远距离传动;37.四杆机构中两个连架杆均为摇杆,均做往复摆动,则为双摇杆机构 [判断题] *对(正确答案)错答案解析:四连杆机构黄色和蓝色均为摇杆;38.根据伯努利定理,在两张纸之间吹气,因为两张纸之间空气流动速度加快所以两张纸会往外张 [判断题] *对错(正确答案)答案解析:根据伯努利定律,空气流速越快,压强越小,跟水流一样,物体由压强大往压强小地方运动;39.电动机是将机械能转化为电能的机械装置 [判断题] *对错(正确答案)答案解析:电机是将电能转化为机械能;40.1939年,德国西屋电气公司制造出家用机器人,让人们对家用机器人更加憧憬[判断题] *对错(正确答案)答案解析:目前尚未应用家用机器人;41.链传动中的链轮可以不在同一平面内 [判断题] *对错(正确答案)答案解析:链传动必需在同一平面内运转;42.人在站在冰面上容易打滑,是因为冰面很光滑,接触面摩擦系数小导致的 [判断题] *对(正确答案)错答案解析:摩擦系数越小越容易打滑,说法正确;43.近代机器人研究始于20世纪中期(对)先后出现了三代机器人 [判断题] *对错(正确答案)答案解析:目前正在研究的就是第三代机器人;44.链传动在突然变速时不容易断裂 [判断题] *对错(正确答案)答案解析:链传动突然的变速会导致链条断裂;45.自行车大链轮和小链轮的旋转方向相同 [判断题] *对(正确答案)错答案解析:自行车是链条传动,链轮旋转方向同向;。
机器人包老师 青少年软件编程等级考试 Python二级(理论试卷)模拟卷9

青少年软件编程等级考试Python二级(理论试卷)模拟卷9试卷编号:867513试卷录入者:机器人包老师(玩得趣科教中心)试卷总分:100出卷时间:2020-2-16 16:15答题时间:40分钟本试卷从考试酷examcoo网站导出,文件格式为mht,请用WORD/WPS打开,并另存为doc/docx格式后再使用1.以下选项对于import保留字描述错误的是Aimport可以用于导入函数库或者库中的函数B可以使用from jieba import lcut 引入jieba库C使用import jieba as jb,引入函数库jieba,取别名jbD使用import jieba 引入jieba库正确答案: B2.以下选项中不可用作Python标识符的是3.14姓名__Name__\#;Python语言不支持面向对象Python语言是解释型语言Python语言是编译型语言3.14不是整数类型的数值type(100)表达式结果可能是<class 'int'>,也可能是<class 'float'>oct(100)表达式结果获得十六进制数hex(100)表达式结果获得八进制数正确答案: A6.运行以下程序,输出结果的是:322.52.50正确答案: C7.17. 运行以下程序,输出的Python数据类型是:字符串类型浮点数类型整数类型复数类型正确答案: B8.下面代码的输出结果是:3.141593.141593Pi=3.143.1416Python通过try、except等保留字提供异常处理功能ZeroDivisionError是一个变量未命名错误NameError是一种异常类型仅循环非正常结束后执行(以break结束)仅循环正常结束后执行总会执行永不执行正确答案: B11.以下代码执行的输出结果是:出错数据可视化Web开发ArcadeTensorFlowCaffe2matplotibopenpyxl生成一个[0.0, 1.0)之间的随机小数生成一个k比特长度的随机整数设置初始化随机数种子a生成一个随机整数正确答案: C16.下面代码的输出结果是407408153159正确答案: A17.给出下面代码:执行代码出错Python语言,是,脚本,语言Python语言是脚本语言无输出正确答案: CPython使用del保留字定义一个函数函数能完成特定的功能,对函数的使用不需要了解函数内部实现原理,只要了解函数的输入输出方式即可。
全国青少年机器人技术等级考试试卷(二级)模拟题

20180917全国青少年机器人技术等级考试试卷(二级)试卷编号:866111试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 13:17 答题时间:30分钟分数:100题数:45一、单选题(共30题,每题2分,共60分)1.链传动相比齿轮传动的优点是?[2分]A.更适合远距离传动B.轮转速更快C.动力更大D.链轮安装可以不在同一平面内2.诸葛亮发明了一种运送军粮的机器人称为?[2分]A.木牛流马B.指南车C.记里鼓车D.运粮车3.一辆六轮车,左侧三个轮转速100rpm,右侧三个轮转速200rpm则此车会?[2分]A.向前直走B.向前走并向左转C.向后退D.原地不动4.以下关于前轮驱动和后轮驱动说法正确的是?[2分]A.前轮驱动因省去了通往后轮的驱动轴和后差动器等零件,内部空间更大B.前轮驱动容易转向过度,后轮驱动转向不足C.前轮驱动零件更多,重量更大D.前轮驱动零件多成本更高5.关于电动机的能量转化说法正确的是?[2分]A.机械能转化为电能B.电能转化为机械能C.动能转化为势能D.势能转化为动能6.以下最适合制造公转自转模型的机械结构是?[2分]A.行星齿轮B.连杆C.曲柄摇杆D.曲柄滑块7.以下哪一项是皮带传动的优点?[2分]A.结构简单,适用于两轴中心距较大的传动场合B.使用寿命短C.传动效率慢D.传动平稳,噪声大8.关于皮带传动说法错误的是?[2分]A.皮带轮旋转方向可能相同B.皮带轮旋转方向一定相反C.皮带轮旋转方向可能相反D.交叉传动时,皮带轮旋转方向相反9.两个相互接触的物体,当其接触表面之间有相对滑动的趋势,但尚保持相对静止时,两者之间会产生?[2分]A.静摩擦力B.滚动摩擦力C.滑动摩擦力D.推动摩擦力10.下列情况产生静摩擦力的是?[2分]A.一个物体在地面上拖动,物体和地面之间的摩擦力B.车轮在地上滚动,车轮和地面之间的摩擦力C.静止在斜面上的物体,物体和斜面之间的摩擦力D.物体从斜面上下滑,物体和斜面之间的摩擦力11.关于飞机升降原理说法正确的是?[2分]A.机翼上方的曲线弧度大于下侧,起飞时上侧气流速度快B.机翼上方的曲线弧度大于下侧,起飞时上侧气流速度慢C.机翼上方的曲线弧度小于下侧,起飞时上侧气流速度快D.机翼上方的曲线弧度小于下侧,起飞时上侧气流速度慢12.在机器人史上,提出“机器人三定律”的是?[2分]A.英格伯特B.阿西莫夫C.马文明斯基D.弗利茨13.中国家用电压一般为?[2分]A.110VB.220VC.50VD.10V14.下列装置中,有曲柄机构的有?[2分]A.缝纫机B.电动机C.扫地机D.洗衣机参考答案:A15.下列哪位科学家发明了蒸汽机?[2分]A.瓦特B.牛顿C.爱因斯坦D.玻尔16.目前正在发展的智能机器人为第几代机器人?[2分]A.第一代机器人B.第二代机器人C.第三代机器人D.第四代机器人17.有的鱼线轮即使松开摇把,鱼线也不会被拉出,这是因为鱼线轮中有?[2分]A.棘轮机构B.凸轮机构C.曲柄机构D.连杆机构18.关于“恐怖谷理论”说法错误的是?[2分]A.提出者是日本的森昌弘B.是指机器人与人过于相似,人们会对之产生恐惧心理C.是指机器人本身会有害怕人类的心理活动D.恐怖谷理论产生于20世纪60年代19.为了减小摩擦力,一般会把摩擦力转化为()[2分]A.滑动摩擦B.滚动摩擦C.运动摩擦D.静摩擦20.下列哪个机构能够实现单向运动?[2分]A.凸轮B.棘轮C.曲柄滑块D.滑轮组二、多选题(共5题,每题4分,共20分)21.关于机器人的发展史说法正确的是?[4分]A.第一代机器人为示教再现型机器人B.第二代机器人为感知型机器人C.第三代机器人为智能型机器人D.第四代机器人为家用机器人22.两物体之间产生摩擦力必须具备哪些条件?[4分]A.两物体相互接触B.两物体有相对运动趋势或发生相对运动C.两物体需要有同一颜色D.两个物体大小需一致23.下列说法正确的是?[4分]A.面向地铁站立,如太靠近,地铁进站时会感觉到“吸力”,容易发生危险B.飞机机翼的外形设计使下侧气压大于上侧,所以能够上升C.风扇能降温是因为吹出的风一定是冷风D.我们用的瓶起子相当于费力杠杆24.下面哪种机构能实现间歇运动?[4分]A.槽轮机构B.棘轮机构C.链式传动机构D.不完全齿轮机构三、判断题(共10题,每题2分,共20分)25.凸轮机构一般由凸轮、从动件和机架三个构件组成。
全国青少年机器人技术等级考试卷(二级)xxxxxxxx

全国青少年机器人技术等级考试卷(二级)xxxxxxxxxxxxxxxx全国青少年机器人技术等级考试试卷(二级)试卷编号:试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 13:17答题时间:30分钟分数:100题数:45一、单选题(共30题,每题2分,共60分)1.链传动相比齿轮传动的优点是?[2分]A.更适合远距离传动B.轮转速更快C.动力更大D.链轮安装可以不在同一平面内参考答案:A2.XXX发明了一种运送军粮的机器人称为?[2分]A.木牛流马B.指南车C.记里鼓车D.运粮车参考答案:A3.一辆六轮车,左侧三个轮转速100rpm,右侧三个轮转速200rpm则此车会?[2分]A.向前直走B.向前走并向左转C.向后退D.原地不动参考答案:B4.以下关于前轮驱动和后轮驱动说法正确的是?[2分]专业资料精心整理A.前轮驱动因省去了通今后轮的驱动轴和后差动器等零件,内部空间更大B.前轮驱动简单转向过度,后轮驱动转向缺乏C.前轮驱动零件更多,重量更大D.前轮驱动零件多成本更高参考答案:A5.关于电动机的能量转化说法正确的是?[2分]A.机械能转化为电能B.电能转化为机械能C.动能转化为势能D.势能转化为动能参考答案:B6.如图,曲柄滑块机构中曲柄做的是甚么活动?A.摇摆活动B.左右移动C.等速回转D.无规律运动参考答案:C7.如图,该机构为?2分]A.棘轮机构B.槽轮机构C.不完全齿轮机构D.凸轮机构2分]专业资料精心整理参考答案:B8.如图,一个大齿轮带动一个小齿轮,下列正确的是?A.作用是加速B.作用是减速C.两轮的旋转方向相同2分]D.两个齿轮的轮齿外形大小可以不一样参考答案:A9.下列图片是棘轮的是?A.aB.bC.cD.d参考答案:B10.以下最得当制造公转自转模型的机器结构是?[2分]A.行星齿轮B.连杆C.曲柄摇杆D.曲柄滑块参考答案:A2分]专业资料精心整理11.如图,以下齿轮属于平齿轮的是?A.aB.bC.cD.d参考答案:A12.以下哪一项是皮带传动的优点?[2分]A.结构简单,适用于两轴中心距较大的传动场合B.使用寿命短C.传动效率慢D.传动平稳,噪声大参考答案:A13.如图,下列不是间歇活动机构的是?[2分]A.aB.bC.cD.d参考答案:C14.关于皮带传动说法毛病的是?[2分]A.皮带轮旋转偏向可能相同专业资料精心整理2分]。
2020机器人技术等级考试四级课程01数字世界 机器人包老师

数字信号数字信号数字信号是一系列时间离散数值离散的信号数字信号是离散的数据,一系列离散的时刻取值而数值的大小和每次增减都是量化单位的整倍数计算机中数字信号用有限位的二进制数表示,就是0和1实例1.数字信号:单片机的IO口输出电平,要么是高电平,要么是低电平,这就是典型的数字信号。
2.模拟信号:电池的电压,随着电池的使用,电压会越来越低,这个就是典型的模拟值。
逻辑数字逻辑是两种对立逻辑状态的逻辑关系数字信号表示方式可以用二值数字逻辑,以及由逻辑电平描述表示客观世界相互关联,相互对立事物比如真假,是非,高低,开关,通断等都是逻辑0和1数字设备计算机:全名叫电子式数字计算机。
(电脑与手机成为我们人人都离不开的工具)电子式:计算机主要是电子电路构成。
计算机内传送和处理的信号是电子信号。
数字:计算机中信息(控制流、数据流)都采用数字化表示方法。
计算机中数字世界有两层含义:计算机中的各种信息用数字代码表示用数字型电信号表示数字代码数字信息在计算机中,所有的信息都用二进制形式表示。
计算机中的数据可以分为数值型数据和非数值型数据。
数值型:有大小、正负之分。
非数值型:字符、文字、图象、声音等一类的信息,以及条件、命令、状态一类的逻辑信息。
在物理实现上只需要取两种可能的极端状态来表示0或1 灯:亮——灭开关:通——断电容:充电——放电脉冲:有——无(分别对应二进制的:0——1)二进制运算方法简单,使电路结构设计简化数字世界数字世界快速演变,如今人类已进入大数据文明当中。
承载大数据的数字平台既是用户的应用中枢,更是重要的基础设施。
其根据发展路径可以分为三个阶段。
第一个数字平台是基于互联网,人类可以把所有信息进行数字化并进行互联,使知识受制于算法的力量,这个时代的代表者是谷歌、百度等公司;第二个数字平台是人类关系网络,人类的行为和关系置于算法的力量之下,可以进行数字读取,代表者是Facebook和微信;实例第三个数字文明平台就是镜像世界,它将整个现实世界都1:1映射变成数字社会,这其中大数据、AI、区块链都将作为基础技术加以应用。
机器人技术等级考试一级课程一级复习总结 机器人包老师

一级目录目录第一章:一级标准第二章:机器人第三章:基本结构第四章:能量守恒第五章:杠杆原理第六章:齿轮第七章:滑轮第八章:做功第九章:传动链一级标准理论1. 了解主流的机器人影视作品及机器人形象2. 掌握稳定结构和不稳定结构的特性3. 掌握齿轮组变速比例的计算4. 熟练区分省力杠杆和费力杠杆5. 熟练区分哪种滑轮会省力6. 了解带传动和链传动各自的优缺点7. 了解不同种类的齿轮实操1. 基本结构认知,了解重心和重力的概念2. 掌握六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋)3. 了解齿轮和齿轮比的概念4. 了解链传动和带传动的概念5. 了解机器人常用底盘(轮式及履带)机器人机器人(Robot)是自动执行工作的机器装置。
它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
科幻小说中提出“机器人三大定律”:第一定律:机器人不得伤害人类个体,或者目睹人类个体将遭受危险而袖手不管第二定律:机器人必须服从人给予它的命令,当该命令与第一定律冲突时例外第三定律:机器人在不违反第一、第二定律的情况下要尽可能保护自己的生存。
练习基本结构结构结构体:为了实现某种功能而建造的物体叫做结构体。
基本工具介绍:钉子、螺丝、螺丝钉、螺丝杆、螺栓、斜面、楔形、螺旋、螺丝刀、扳手等。
斜面:指与水平方向不为零的夹角的平面。
斜面是一种简单机械,可用于克服垂直提升重物的困难,省力但是费距离。
斜面的工作原理:斜面与平面的倾角越小,斜面较长,则省力越大,但费距离。
斜面与平面的倾角越大,斜面较短,则省力越小,但省距离。
楔形楔形:楔是斜面的应用,原指上厚下薄的小木橛,在结构中表示一头尖一头稍粗的物品。
生活中常见的应用为斧子,钉子等。
螺旋螺旋:螺旋是一种简单机械,是斜面的变形。
生活中常见的应用为螺丝钉、螺旋桨、压榨机等。
稳定稳定性分析:每个物体都是由简单的图形构成的,也就是说物体的每个面都是由圆,三角形,四边形和多边形构成的。
中国青少年机器人信息技术等级考试参考
中国青少年机器人信息技术等级考试参考(一、二)机器人常识1.机器人历史事件及重要理论古代机器人西周时期伶人汉代地动仪,记里鼓车(张衡)三国时期木牛流马2.机器人产生1920年捷克斯洛伐克卡雷尔.恰佩克robot1939年美国西屋电气公司家用机器人1942年美国科幻巨匠阿西莫夫提出机器人三大定律{1.机器人不应该伤害人类 2. 机器人应遵守人类命令与第一条违背的命令除外 3.机器人应该保护自己与第一第二条相抵触者除外}1948年洛伯特维纳出版《控制论》,以计算机为核心自动化工厂1954年美国约瑟夫英格伯格与德沃尔制作第一台工业机器人约瑟夫英格伯格-----工业机器人之父1966年斯坦福大学------谢客机器人,移动机器人1969年日本机器人专家森昌弘-----恐怖谷理论{恐怖谷理论:人形玩具或机器人的仿真度越高,越过95%人们越有好感,担当超过一个临界点时,这种好感度会突然降低越像越人越反感恐惧,直至谷底}3.国际上机器人比赛(1)机器人世界杯RobotCup1997.8.23-29 日本名古屋(首届)2008.6 中国苏州第十二届(2)微型机器人世界杯足球比赛1996.11 韩国一年一次4.机器人三代发展第一代:示教再现型机器人只有记忆存储能力工业机器人第二代:感知型机器人可获得作业环境和作业对象部分有关信息,进行实时处理第三代;智能机器人具有更完善环境感知能力,还具有逻辑思维,判断,决策能力,自主工作4.主流机器人电影黑客帝国矩阵我、机器人(i robot)尼桑机器管家安德鲁机器人与弗兰克机器人机器人总动员瓦力霹雳五号number5变形金刚汽车人霸天虎超能查派查派星球大战C3-PO R2-D2机器人历险记罗德尼异形艾什(ash)主教5.机器人定义机器人:自动执行工作的机器装置机器人系统基本结构:机械部分,传感部分,控制部分机器人组成:执行机构、驱动装置、检测装置、控制系统、复杂机械机器人驱动:电力驱动、液压驱动、气压驱动人类对电机要求:体积小、高速高精度6.机器人特点工业机器人:1. 对环境有很强的适应能力,代替人类在有害场所从事危险工作2.动作准确性高,可保证产品质量的稳定性3.能高强度在环境中从事单调简单的劳动4.具有很广泛的通用性医用机器人:1. 不能发生错误2.非专业人员也可以正确使用3.对医生提供有效帮助4.可以直接与人接触(一级)三角形三角形特点:三角形具有稳定性,有着稳固、坚定耐压的特点关于重心一个结构是否稳定,除了考虑结构外还要考虑放置的位置与物体的重心1.与地面接触越大,物体越稳2.重心越低,物体越稳3.通过重心做竖直向下的直线与地面交点垂线,交点在地面稳定,交点不在地面不稳定力力的作用效果:改变物体的运动状态,改变物体的形状力的符号:F 单位牛顿:N二力平衡平衡:运动状态不发生改变静止或匀速直线运动平衡条件;两个力大小相同,方向相反{同一物体,同一直线}常见力介绍重力:G G=mg g=9.8N/kg 或g=10N/kg摩擦力f摩擦力产生的两个条件:1.相互接触2.物体间发生相对运动或有相对运动趋势摩擦力可分为:滑动摩擦力、静摩擦力、滚动摩擦力同一物体同环境下:静摩擦力>滑动摩擦力>滚动摩擦力简单机械斜面斜面工作原理:斜面与平面倾角越小,斜面越长,省力越大,但是距离越长楔形也是斜面的应用螺旋斜面二度应用杠杆一边重量×物体用支点距离=另一边重量×另一边物体到支点距离杠杆五要素:动力、动力臂、支点、阻力臂、阻力齿轮齿轮特点:优点 1.准确传递动力2.传动力大3.结构紧凑缺点噪音大、易损坏滑轮滑轮分为动滑轮和定滑轮定滑轮:改变力的方向,但不省力动滑轮:不改变里的方向,但省力滑轮组:既改变力的方向又能省力区分定滑轮与动滑轮:滑轮中心是否移动齿轮组大齿轮带动小齿轮加速转速1:X 齿数X:1小齿轮带动大齿轮减速转速X:1 齿数1:X能量能量守恒定律:能量不会凭空消失,也不会凭空产生,它只会从一种形式转化为其他形式,或者从一个物体转移到另一个物体,而在转化和转移过程重,能量总和保持不变。
机器人技术教育等级考试大纲考级标准(机器人包老师)

中国国际科技促进会青少年人工智能教育普及工作委员会青少年机器人教育等级评测大纲(V1.0)中国国际科技促进会《青少年机器人技术等级教育规范》团体标准编制组 《青少年人工智能教育创新与实践的探索研究》课题组青少年机器人教育等级评测中心2019年10月青少年机器人教育一级大纲 主题:简单手动机械结构与力的了解对象:无源模型理论部分1、决定物体稳定性的几个方面2、稳定结构与不稳定结构的特点解析3、力的讲解4、杠杆原理的原理与应用5、常见省力杠杆、费力杠杆及变形6、齿轮传动与皮带传动的特点解析技术部分1、零件的加长、加宽、搭高2、灵活转动的常用技巧3、省力杠杆、费力杠杆4、齿轮的加速、减速及应用5、稳定结构与不稳定结构对应作品以及变形6、皮带传动在模型中的应用青少年机器人教育二级大纲 主题:复杂机械结构与马达的使用应用对象:有源模型理论部分1、常见的力的特点与解析2、力的分解3、常见四边形的特点与边长关系4、圆在轮轴中的应用5、电与磁的转换6、常见四连杆机构以及应用7、曲柄、摇杆、滑块、滑杆等特点与应用8、摩擦力的特点与解析9、压力与压强的关系技术部分1、高级齿轮传动在模型中的应用2、链传动在模型中的应用3、曲柄滑杆、滑块等结构在模型中的应用4、弹射装置的搭建5、能够利用结构原理对作品进行适当创新青少年机器人教育三级大纲主题:简单编程思维与结构的结合,使用图形化软件进行程序编写。
对象:有源模型结构部分1、了解常见机器人的几种结构模式并能够搭建。
2、会搭建常用车的基础平台。
3、两驱、四驱的特点及模型应用。
4、能够将一二级中用到的结构与基础平台结合,对机器人进行创新。
编程部分1、了解输入、输出的原理与应用。
2、了解数字量、模拟量的特点以及对应程序编写。
3、了解常见传感器的工作原理。
4、熟知编程的三种结构。
5、了解与、或、非三种逻辑关系。
6、用对应的图形化软件进行程序编写。
7、建立良好的变成思维并能够通过流程图画出。
机器人等级考试
机器人等级考试的发展趋势向更高层次和更广泛领域拓展
• 考试内容将更加丰富和全面
• 考试形式将更加多样化和智能化
机器人等级考试的发展趋势在于与国际接轨
• 与国际机器人等级考试制度进行交流和合作
• 提高我国机器主要内容与形式
机器人等级考试的考试科目与要求
• 考核学生的理论知识和实践能力
⌛️
机器人等级考试的目的是选拔和培养人才
• 为机器人领域输送具有专业技能的人才
• 提高学生的创新能力和团队协作能力
机器人等级考试的目的与意义
机器人等级考试的目的在于评估学生的技术水平
• 为学生提供展示自己能力的平台
• 为用人单位提供选拔人才的依据
机器人等级考试的意义在于推动机器人技术的发展
03
机器人等级考试的备考策略与方法
制定科学的备考计划与时间安排
制定备考计划时要充分考虑自己的实际情况
• 分析自己的优势和劣势,确定备考重点
• 制定合理的学习计划和进度安排
合理安排备考时间,保证学习效果
• 合理安排学习时间,避免临时抱佛脚
• 保证充足的休息时间,避免学习疲劳
提高机器人相关知识水平与实践能力
• 阅读经验分享文章,了解备考方法和技巧
• 与其他考生交流,分享备考经验和心得
05
机器人等级考试的真实案例分析与实践
机器人等级考试的顺利通过案例分享
分享顺利通过机器人等级考试的经验和教训
• 分析自己在备考过程中的优势和劣势
• 总结备考过程中的成功经验和教训
为其他考生提供借鉴和参考,提高备考效果
• 学习成功案例中的备考方法和技巧
提供机器人等级考试的备考建议,帮助考生提高备考效果
• 合理安排备考时间,保证学习效果
02机器人技术等级考试四级Arduino智能小车前后左右综合实验程序代码C语言

02机器人技术等级考试四级Arduino智能小车前后左右综合实验程序代码C语言//============================机器人包老师=========================== // 智能小车前后左右综合实验//===============================================================int LH=7; //左电机后退int LQ=5; //左电机前进int RQ=6; // 右电机前进int RH=4; // 右电机后退void setup(){//初始化电机驱动IO为输出方式pinMode(LQOUTPUT); // (PWM)pinMode(LHOUTPUT); // (PWM)pinMode(RQOUTPUT);// (PWM)pinMode(RHOUTPUT);// (PWM)}void run(int time) // 前进{digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);//PWM比例0~255调速,左右轮差异略增减analogWrite(RH0);digitalWrite(LQHIGH); // 左电机前进digitalWrite(LHLOW);analogWrite(LQ100);//PWM比例0~255调速,左右轮差异略增减analogWrite(LH0);delay(time * 1000); //执行时间,可以调整}void brake(int time) //刹车,停车{digitalWrite(RQLOW);digitalWrite(RHLOW);digitalWrite(LQLOW);digitalWrite(LHLOW);delay(time * 1000);//执行时间,可以调整}void left(int time) //左转(左轮不动,右轮前进){digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQLOW); //左轮不动digitalWrite(LHLOW);analogWrite(LQ0);analogWrite(LH0);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void spin_left(int time) //左转(左轮后退,右轮前进) {digitalWrite(RQHIGH); // 右电机前进digitalWrite(RHLOW);analogWrite(RQ100);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQLOW); //左轮后退digitalWrite(LHHIGH);analogWrite(LQ0);analogWrite(LH100);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void right(int time) //右转(右轮不动,左轮前进){digitalWrite(RQLOW); //右电机不动digitalWrite(RHLOW);analogWrite(RQ0);analogWrite(RH0);//PWM比例0~255调速digitalWrite(LQHIGH);//左电机前进digitalWrite(LHLOW);analogWrite(LQ100);analogWrite(LH0);//PWM比例0~255调速delay(time * 1000); //执行时间,可以调整}void spin_right(int time) //右转(右轮后退,左轮前进)digitalWrite(RQLOW); //右电机后退digitalWrite(RHHIGH);analogWrite(RQ0);analogWrite(RH100);//PWM比例0~255调速 digitalWrite(LQHIGH);//左电机前进digitalWrite(LHLOW);analogWrite(LQ100);analogWrite(LH0);//PWM比例0~255调速 delay(time * 1000); //执行时间,可以调整}void back(int time) //后退{digitalWrite(RQLOW); //右轮后退digitalWrite(RHHIGH);analogWrite(RQ0);analogWrite(RH100);//PWM比例0~255调速 digitalWrite(LQLOW); //左轮后退digitalWrite(LHHIGH);analogWrite(LQ0);analogWrite(LH100);//PWM比例0~255调速 delay(time * 1000); //执行时间,可以调整}void loop(){delay(2000); //延时2s后启动back(1); //后退1sbrake(0.5);//停止0.5srun(1);//前进1sbrake(0.5);//停止0.5sleft(1);//向左转1sright(1);//向右转1sspin_right(2); //向右旋转2sspin_left(2);//向左旋转2sbrake(0.5);//停车}。
2024年6月青少年机器人技术等级考试理论综合试卷六级真题(含答案)

2024年6月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100分题数:30一、单选题(共20题,共80分)。
1. 使用ESP32 for Arduino I²C类库,下列选项中,具有将从设备的地址加入到发送数据队列功能的成员函数是()。
A. Wire.begin()。
B. Wire.write()。
C. Wire.transfer()。
D. Wire.beginTransmission()。
标准答案:D。
2. 下图是三相反应式步进电机连续节拍工作示意图,图示所对应的通电顺序是()。
A. A相→B相→C相→A相。
B. A.相→AB相→B相→BC相→C相→CA相→A相。
C. AB相→BC相→CA相→AB相。
D. A相→AB相→BC相→CA相→A相。
标准答案:A。
3. 使用ESP32 for Arduino SPI类库,下列选项中,具有设置数据传送方式功能的成员函数是()。
A. SPI.begin()。
B. SPI.setBitOrder()。
C. SPI.setFrequency()。
D. SPI.beginTransaction()。
标准答案:B。
4. 一台联网的计算机,可完成网页浏览、文件下载等任务,不同任务在应用层分别具有不同的()。
A. 端口B. 传输层协议C. IP地址D. 网络层协议标准答案:A。
5. 下图所示的SPI外设原理图中,从机选择数据线对应的是()。
A. AB. BC. CD. D标准答案:D。
6. 关于MPU6050姿态传感器,下列描述错误的是()。
A. MPU6050是一个6轴传感器。
B. MPU6050采用I²C协议进行通信。
C. MPU6050集成了3轴加速度计,3轴分别指X轴、Y轴和Z轴。
D. MPU6050返回的角速度分量是16位的无符号整数。
标准答案:D。
7. ESP32forArduino提供的WiFi类库的成员函数中,用于返回当前环境下SSID数量的成员函数是()。
scratch二级20考级编程 软件编程等级考试 机器人包老师

考级编程
“巡线小车”:编程说明:舞台上有一条加粗的黑线,小车能自动沿着黑线前进。
当小车触碰到黑线时,还能发出出声音。
黑线需要自己绘制、小车可使用角色库中的图案。
1.准备工作
(1)删除原小猫角色,导入小车角色,并合理设定小车的大小。
(2)在舞台中央绘制一条加粗的黑线
(3)在小车的车头部位画一个红色圆形,填充和边框都是同一种颜色,能用该形状检测黑色。
2.功能实现
(1)小车角色初始位置与黑色粗线部分重合,车头处的红色圆形位于黑色粗线边缘。
(2)当小车触碰到黑线时,还能发出出声音。
(3)点击绿旗后,小车角色自动检测颜色,当小车角色前面的红色圆形检测到黑色粗线时,系统播放音效,同时小车向与黑线位置相反方向转向并小幅移动;这时小车角色前面的红色圆形会检测到白色区域,小车又向与白色区域相反的方向转向并小幅移动。
如此循环,小车会沿着黑色粗线与白色舞台背景之间的交界处向前运动,不会离开黑线。
2020机器人技术等级考试六级课程第八章03码盘读取 机器人包老师

可移动轮式机器人在工业与生活中起到重要作用。
而对于小车运动精准控制是其核心技术,需要应用PID控制。
典型应用:AGV小车,无人机,机械臂,可移动机器人等
码盘读取
码盘及码盘光电模块简介
要实现小车位置和转速的精确控制,需要采用闭环控制,实时收集马达的运动状况。
本项目采用码盘、光电对管及中断控制实现马达转速数据的读取。
器材配套码盘的栅格线数:112,码盘和TT马达电机轴相连。
码盘光电模块安装在小车底板上,安装完毕,码盘位于光电模块的U型槽中。
码盘(encoding disk)是指测量角位移的数字编码器。
它具有分辨能力强、测量精度高和工作可靠等优点,是测量轴转角位置的一种最常用的位移传感器。
码盘分为绝对式编码器和增量编码器两种,前者能直接给出与角位置相对应的数字码;后者利用计算系统将旋转码盘产生的脉冲增量针对某个基准数进行加减。
可移动轮式机器人在工业与生活中起到重要作用。
而对于小车运动精准控制是其核心技术,需要应用PID控制。
典型应用:AGV小车,无人机,机械臂,可移动机器人等
本小节内容复习:5-6级教材P197-P199 本小节作业思考:5-6级教材P215题3。
机器人技术等级考试四级实操真题演练20180916机器人包老师
全国青少年机器人技术等级考试四级实操真题考试机器人包老师2018年9月16号试卷编号:8467939试卷录入者:机器人包老师(玩得趣科教中心)试卷总分:100出卷时间:2019-09-5 8:54答题时间:45分钟自动跟随小车(共1题,每题100分,共100分)1、主题:跟随小车器件:三四级等级考试套件要求:1、现场搭建小车。
2、小车从发车线出发,向前移动,距离前方障碍物10厘米处暂停。
3、移动障碍物,随着障碍物的移动,小车与障碍物间的距离始终保持10厘米。
4、通过超声波传感器进行距离检测。
5、程序编写采用C语言,不得使用图形化软件编写。
6、考试结束,考生将代码转贝上交。
说明:1、考场编程环境为: Arduino IDE2、实操开始,考生需更先向主控板写入 blink程序,经监考老师确认后方可进行小车组装。
3、小车距障碍物的距离为超声波传感器前端距离障碍物的距离。
4、出发前,小车距离障物的距离为20-30cm。
5、障碍物为竖向放置的A4尺寸大小。
6、编写程序文件命名规则为DJ KS_准考证号.ino。
参考资料:HC-SR04/05超声波的工作原理如下图1所示.1、先向Tring引脚发送时长不小于10us的高电平,触发超声波提块。
2、触发后,模块会自动发射8个40KHz的方波,并自动检测是否有信号回。
3.如果有信号返回,通过Echo引脚输出一个高电平,高电平持续的时间便是超声波从发射到接收的时间。
/*本程序为机器人包老师超声波小车四级课程示例程序仅供参考程序中用串口打印来显示超声波测量距离*/int fd=30;int bd=10;void setup(){pinMode(1, OUTPUT);pinMode(2, INPUT);pinMode(12, OUTPUT);pinMode(13, OUTPUT);Serial.begin(9600);}void loop(){float d=checkdistance_1_2(); Serial.println(d);if((d>=fd-bd)&&(d<=fd+bd)){ analogWrite(5,100);analogWrite(6,100);if(d>fd){digitalWrite(12,HIGH);digitalWrite(13,LOW);forward();}else if(d<fd){digitalWrite(12,LOW);digitalWrite(13,HIGH);backward();}else{digitalWrite(12,HIGH);digitalWrite(13,HIGH);pause();}}else {digitalWrite(12,HIGH);digitalWrite(13,HIGH);pause();}}float checkdistance_1_2() {digitalWrite(1, LOW);delayMicroseconds(2);digitalWrite(1, HIGH);delayMicroseconds(10);digitalWrite(1, LOW);float distance = pulseIn(2, HIGH) / 58.00; delay(10);return distance;}void forward() {analogWrite(8,255);analogWrite(7,0);analogWrite(4,255);analogWrite(3,0);}void backward() {analogWrite(8,0); analogWrite(7,255); analogWrite(4,0); analogWrite(3,255); }void turnleft() {analogWrite(8,0); analogWrite(7,0); analogWrite(4,255); analogWrite(3,0); }void turnright() {analogWrite(8,255); analogWrite(7,0); analogWrite(4,0); analogWrite(3,0); }void rotateleft() { analogWrite(8,0); analogWrite(7,255); analogWrite(4,255);analogWrite(3,0);}void rotateright() {analogWrite(8,255);analogWrite(7,0);analogWrite(4,0);analogWrite(3,255);}void pause() {analogWrite(8,0);analogWrite(7,0);analogWrite(4,0);analogWrite(3,0);}具体参考与实操演示请联系机器人包老师模拟四级实操真题考试之后就可以将作品发送给机器人包老师进行评阅然后机器人包老师评分与给出建议备注:机器人包老师是高职院校机器人专任教师与机器人创客导师,三维创意设计创客导师,也参与机器人技术等级考试考级服务中心的一二三四级的监考与评分,对于机器人技术等级考试考核评分非常清楚,可以很好帮助与辅助学员进行考级模拟。
机器人包老师-全国青少年机器人技术等级考试一级内容简要:简单机械
全国青少年机器人技术等级考试一级内容简要:简单机械
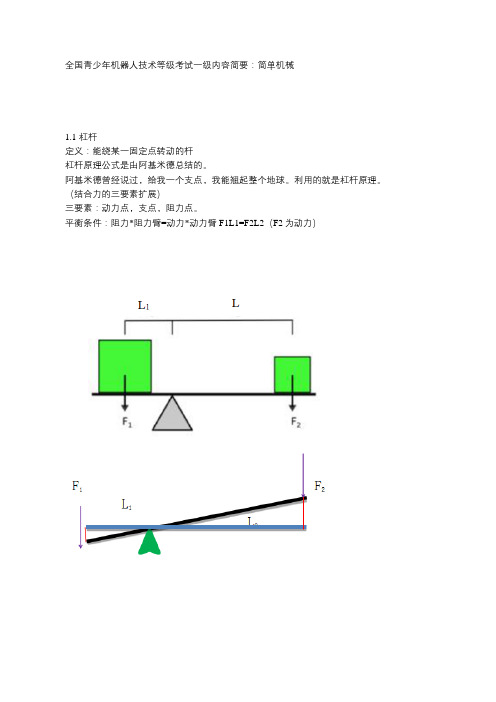
1.1 杠杆
定义:能绕某一固定点转动的杆
杠杆原理公式是由阿基米德总结的。
阿基米德曾经说过,给我一个支点,我能翘起整个地球。
利用的就是杠杆原理。
(结合力的三要素扩展)
三要素:动力点,支点,阻力点。
平衡条件:阻力*阻力臂=动力*动力臂 F1L1=F2L2(F2为动力)
生活中的杠杆看需求,有时使用费力杠杆,为了省距离。
1.2 滑轮
定滑轮:轴的位置固定不变的滑轮
动滑轮:轴的位置随着被拉物体一起运动的滑轮。
滑轮组:由多个动滑轮和定滑轮组成的机构。