基于Pro/E的履带式联合收割机转向机构的运动仿真
基于Pro/E的货车转向架参数化设计系统的研究
toktojc oine rga n nug, a b s cn lg n rga n tfc. oli bet r tdpo rmmigl g ae dt aet h oo adpo mmigi e ae , — e a a e y r nr
T ed s s m o eg t a o i i d v lp do e ai o aa t c ei c o g . h ei s t f i r b ge s e eo e nt s f rmer s t h ly n g ye r f h C h b s p i d g en o n
ZHOU Yon —i , T gl ng AN n me , DI Ca — i NG i g la n
( e t l o t nv ri , h n sa n n 1 0 5 C ia C nr u U ies y C a gh a 0 7 , hn) aS h t Hu 4
承 受 来 自车 体 及 线 路 的 各 种 载 荷 并缓 和 动 作 用
收 稿 日期 :2 o _3 1 o 50 — 7 作 者简 介 :周咏 翎 (9 3 ) 16 一 ,男 ,湖南 沅江 人 ,副教授 ,主 要研 究方 向为 C /AM、计算 机图形 学 。 ADC
维普资讯
p a tr n h p r t n o u l i g o d f i g t e c mp n n s a d p r d l i r a me e s a d t e o e ai f b i n r mo i n o o e t n a t mo e s o d y h s smp i e . s d o u r n i l d Ba e n c re tCAD o t r e t e s c n a y d v lp n s c ri u h o g i f s fwa , e o d r e e o me ti a re o t t ru h h d
基于Pro/E和ADAMS的摩擦同步离合器建模及动力学仿真
输 出设计
结束
种 重 要 方 法 。 此 , 文 介 绍 了 一 种 运 用 Po E 软 件 为 本 r/
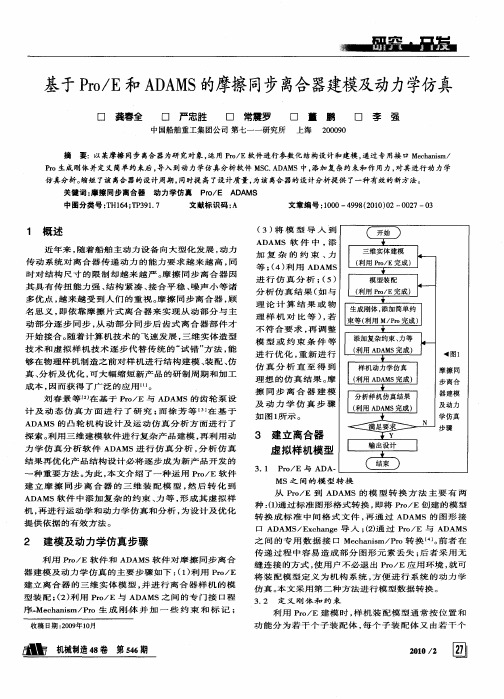
建 立 摩 擦 同 步 离 合 器 的 三 维 装 配 模 型 , 后 转 化 到 然 ADAMS软 件 中 添 加 复 杂 的 约 束 、 等 , 成 其 虚 拟 样 力 形 机 , 进 行 运 动 学 和 动 力 学 仿 真 和 分 析 , 设 计 及 优 化 再 为 提供 依据 的有 效方 法 。
.图1 _
摩擦 同 步离合
器 建 模 及 动 力
分析样 机仿真结果 ( 利用 A A D MS完成)
计 及 动 态 仿 真 方 面 进 行 了 研 究 ; 徐 芳 等 基 于 而 3在
AD AMS的 凸 轮 机 构 设 计 及 运 动 仿 真 分 析 方 面 进 行 了
1 概 述
传 动 系统 对 离合 器 传递 动 力 的 能力 要 求越 来 越 高 , 同
时 对 结 构 尺 寸 的 限 制 却 越 来 越 严 。 擦 同 步 离 合 器 因 摩
开始
加 复杂 的约束 、 力
等 ; 4) 用 ADAMS ( 利
三维实体建模
( 用 Po E完 成 ) 利 r/ 模 型装 配
进 行 优 化 , 新 进 行 重 仿 真 分 析 直 至 得 到 理 想 的仿 真 结果 。 摩 擦 同 步 离 合 器 建 模 及 动 力 学 仿 真 步 骤
如 图1 示 。 所
添加复杂约束 、 力等
( 利用 A A D MS完成 )
样 机 动力 学 仿 真 ( 用AA 利 D MS完 成 )
名 思 义 , 依 靠 摩 擦 片 式 离 合 器 来 实 现 从 动 部 分 与 主 即
210979654_基于ADAMS_的履带式挖掘机越障动力学建模与分析
基于ADAMS 的履带式挖掘机越障动力学建模与分析秦仙蓉1 冯亚磊1 沈健花2 张 氢1 孙远韬11同济大学机械与能源工程学院 上海 201804 2惠普信息技术研发有限公司 上海 200131摘 要:履带式挖掘机作业时需跨越各类障碍物,在履带式挖掘机跨越障碍物时会受到来自地面的冲击载荷而产生疲劳破环,故研究履带式挖掘机的整机越障动力学特性十分必要。
基于动力学仿真软件ADAMS,研究了履带式挖掘机的整机越障动力学特性。
以某中型履带式挖掘机为例,在Pro/E 中完成履带式挖掘机的三维建模,在ADAMS 中建立其简化虚拟样机,完成该履带式挖掘机越障的动力学仿真。
结果表明:越障过程中,挖掘机车体垂向最大位移与障碍物设置高度一致,整个越障过程较为平稳。
此外,车体的转动角速度在车体越过障碍边缘到引导轮触地时刻存在较明显的变化过程。
关键词:履带式挖掘机;越障;动力学仿真;虚拟样机中图分类号:U446 文献标识码:A 文章编号:1001-0785(2023)05-0018-05Abstract: In view of the fact that crawler excavators need to cross all kinds of obstacles during operation, and are easily subjected to impact load from the ground, resulting in fatigue damage, it is necessary to study the dynamic characteristics of the whole crawler excavator crossing obstacles. In this study, based on the dynamic simulation software Adams, the dynamic characteristics of the whole crawler excavator are studied. Taking a medium-sized crawler excavator as an example, the three-dimensional modeling of the crawler excavator is completed in ProE, and its simplified virtual prototype is established in Adams, and the dynamic simulation of the crawler excavator crossing obstacles is completed. The results show that the vertical maximum displacement of the excavator body is consistent with the height of the obstacle during the obstacle crossing, and the body is relatively stable during the whole obstacle crossing. In addition, the rotation angular velocity of the excavator changes obviously, which occurs during the period when the excavator travels to the edge of obstacle crossing and the guide wheel touches the ground.Keywords: crawler excavator; obstacle crossing; dynamic simulation; virtual prototype0 引言挖掘机被广泛用在各类土石方开挖工程现场,据不完全统计,土石方施工过程中约60%的土石方开挖都是靠挖掘机来完成的。
基于Pro/E吊杯式栽苗器的三维建模与运动仿真分析

农 机 化 研 究
第 1期
基于 P r o /E 吊 杯 式 栽 苗 器 的 三 维 建 模 与 运 动 仿 真 分 析
张小 志 ,李 旭英 , 田 阳 ,迟 明路
( 内蒙 古 农业 大 学 机 电工 程学 院 ,呼 和浩 特 摘 0 1 O 0 1 8 )
要 :吊杯 是 吊杯 式 移 栽 机 的 核心 部 件 , 其 运 动过 程 将 直 接影 响到 秧 苗 的移 栽 质 量 。 因此 , 对 于 吊杯 的运 动 分
析 显得 尤 为 重 要 。 目前 , 许 多 学 者 已研 究 了 吊杯 运 动 的 轨 迹 对 移 栽 质 量 的影 响 , 但 吊杯 的杯 嘴 运 动 对 于栽 植 效 果 的影 响并 未 进 行 相关 研 究 。为此 , 基于 P r o / E完 成 了 吊杯 式 栽 苗 器 各 零 部 件 的三 维 实 体 建 模 , 并 进 行 吊杯 式 移 栽器 的虚 拟 装 配 和运 动 仿 真 分析 。仿 真 结果 : 测得 了杯 嘴 运 动过 程 的位 移 一 时 问特 性 曲线 , 分 析 得 到 了栽 苗 器 杯 嘴 的最 大 开 E l 宽度 和杯 嘴 的 开 E l 运动时间 , 为 优 化 吊杯 式 栽 苗器 的结 构 提供 了基 础数 据 和 理论 依 据 。 关 键词 :栽 苗 器 ;移 栽 机 ;凸 轮机 构 ;三 维建 模 ;运 动 仿 真
农产 品提前 上市 , 增 加其 经济 价值 , 还可 以保 温 、 保
湿、 消 除 杂 草 。所 以 , 到 目前 为 止 , 膜 上 移栽 技 术 在 我 国得 到 了 广 泛 的应 用 ¨ 。 很 多 学 者 对 移 栽 机 进 行 了 设计 研 究 , 封 俊 等 分 析 了 吊杯 式 移栽 机 栽 苗 器 的 运 动 轨 迹 与特 征 系 数 的关 系 J , 安 凤 平 等 提 出 了“ 零 速
毕业设计(论文)-基于proe的减速器的结构设计及运动仿真[管理资料]
![毕业设计(论文)-基于proe的减速器的结构设计及运动仿真[管理资料]](https://img.taocdn.com/s3/m/92749f330c22590103029d61.png)
襄樊学院毕业设计(论文)正文题目基于PRO/E的减速器的结构设计及运动仿真专业班级姓名学号指导教师职称2007年3 月20 日摘要齿轮减速器是广泛应用于机械行业的机械装置。
它是一种在原动机与工作机之间用来降低转速的独立传动装置。
随着科学技术和国民经济的发展,在机械传动系统中的需求量越来越大,质量要求也越来越高,传统的减速器设计方法己不能满足用户的需求。
为了适应社会的发展,本论文对减速器本身的结构特点和性能进行研究。
运用PRO/E软件的高级建模技术和机构运动仿真技术对一级直齿圆柱齿轮减速器进行三维建模、虚拟装配及运动仿真。
这样更直观,更全面地反映了减速器的设计意图,让设计者在设计阶段就能清楚地见到产品的最终结果,及时发现设计问题,缩短设计开发周期。
既减轻了工作量又节省资金。
大大提高了产品的设计开发效率。
符合现代技术的发展要求。
关键词:齿轮减速器、PRO/E软件、三维建模、虚拟装配、运动仿真Abstract:The gear reducer is widely applies to the mechanical profession mechanism。
It is one kind uses for the desponding between Original machine machine and the working machine the independent。
With the development of science technology and national economy; larger number and higher quality involutes cylindrical reducer are required, and the traditional design method could not satisfy the requirement of users. In order to adapt to developing society. Using PRO/E function and so on software high-level modeling technology and organization movement simulation realizes level of cylindrical greases reduction gear various spare parts and the entire machine 3D geometry design、the assemble fictitiously and assembles and the movement simulation. Is like this more direct-viewing, comprehensively had reflected the reduction gear design intention, enables the designer in the design stage clearly to see the product the final outcome, promptly discovered the design question, and reduces the design development cycle. Both reduced the work load and to save the fund. Conforms to the modern technology development requirement.Key word: gears reducer; Pro/E software; 3D; assemble fictitiously; motion simulation目录第一章绪论 ............................................................. - 1 -§研究的目的及意义 (1)§国内外的研究现状及发展趋势 (2)§主要研究内容、途径及技术路线 (2)§....................................................................... - 2 - §....................................................................... - 3 - §本章小结.. (4)第二章减速器的零件结构设计 .............................................. - 6 -§减速器总体结构的分析.. (6)§减速器主要零件的三维造型 (6)§....................................................................... - 6 - §...................................................................... - 14 - §...................................................................... - 15 - §...................................................................... - 18 - §. (18)第三章减速器的装配 ..................................................... - 19 -§. (19)§ (19)§ (21)§ (22)第四章减速器的运动仿真 ................................................. - 23 -§. (23)§ (23)§机构仿真 (26)§ (29)第五章结束语 ............................................................ - 30 -谢辞.................................................................... - 31 -参考文献.................................................................. - 32 -第一章绪论§研究的目的及意义当今任何一个国家,若其要在综合国力上取得优势地位,就必须在科学技术上取得优势。
毕业论文-文献综述范文
文献综述课题在开展过程中共参阅了50余篇参考文献,主要集中在以下几个方面:一、国内外轧钢机现状的研究赵宇峰的《浅议轧钢机和轧钢技术的发展》一文就轧钢工业发展的历史进行概述,然后针对我国轧钢机以及轧钢技术现状和发展趋势进行了概述,并对未来轧钢技术发展的重点和方向进行了分析和预测。
翁庆宇的《我国轧钢生产技术近年来的进步与发展(二)》中总结了近几年我国轧钢生产技术的进步,其主要体现在钢材品种结构调整基本满足了国民经济发展的需要,轧钢装备现代化和国产化工作的重大突破为提高产能、提升品种及质量创造了良好条件,轧钢生产技术经济指标进一步提高,轧钢技术自主创新取得一批重要成果,核心技术的自主创新出现了可喜进展.尹建良的《轧钢生产技术发展的探索》一文中指出:随着工业的迅猛发展,钢材的需求量也伴随急剧增加,从而使得轧钢生产技术也伴随着发展.文章介绍了我国钢铁工业生产情况,轧钢机械及分类,轧钢生产技术发展的特征,轧钢生产技术研究与开发的发展方向。
二、轧钢机及其零部件的三维建模、运动仿真分析研究1、硕士学位论文段雪厚的《冷轧薄板带钢平整关键参数计算模型的研究》一文中提到:在冷轧薄板带钢的平整轧制中,明确平整轧制力及力矩、负载辊缝等平整关键参数的数学模型有助于平整轧制过程的分析与研究,对提高冷轧薄板带钢的质量具有重要作用。
文章以冷轧薄板带钢平整机为研究对象,建立了适用于冷轧薄板带钢的平整轧制力及力矩、负载辊缝的数学模型,其对于新建或改建机组平整机成套设备的技术研究具有重要的指导意义。
李勇华的《冷轧薄带板形控制技术研究》先是分析了带钢宽度、轧制力、轧辊辊径、工作辊窜辊量和弯辊力对辊系弹性变形和辊缝变形凸度的影响,掌握了主要板形影响因素对辊缝二次变形凸度和辊缝四次变形凸度的影响规律.其次建立了物理意义清晰的板形控制数学模型。
把承载辊缝凸度分为空载辊缝凸度和变形辊缝凸度两部分,简化了板形控制模型结构;建立了描述轧制力、弯辊力、带钢宽度、轧辊直径和辊系弹性变形之间关系的承载辊缝凸度模型,并回归出了板形预报模型的系数;并分析推导了冷轧薄带板形良好的条件。
基于Pro/E内齿轮传动参数化设计及运动仿真
1 . 2 创建内齿廓渐开线
1 )添 加 齿轮 参 照 圆关 系 。利用 关 系式 绘 出基
以及 内齿轮 传动机 构 的运动 仿真 与分析 过程 。
圆 、齿 顶 圆 、齿 根 圆 、 分 度 圆 。单 击 工 具 栏 “ 草
绘 ”按钮 ,选择F R O N T 基 准平面 为草绘平 面 ,在草 绘环境 中绘制4 个 同心 圆,并使 这4 个 圆的尺 寸受参 数和关 系式驱动 。选择 “ 工具 ” 关 系”命令打 开 “ 关 系 ”对话框 ,添加如表2 所示 的关 系 。
设计效 率。通过运 动仿真 ,可 以在 虚拟的环境 下对内齿轮传 动进行运 动模 拟和干涉检查 ,验 证了内齿轮设计的准确 性 ,具有 实用价值 。 关键词 :内齿轮 ;参数化设计 ;P R O / E ;运动仿真与分析
中国分类号 :T H 1 3 2 文献标识码 :B 文章编号 :1 0 0 9
低下 ,容 易 出现 差错 。而P r o / E 参 数 化 建模 能 使 产 品 的基 本 设 计 参 数 与 产 品 的尺 寸 、形 状 、 位置 之
间 以各 种 关 系关 联 , 由这 些关 系式 驱 动 尺 寸 ,使 设 计 者 能 根 据 不 同的 设 计 需求 ,修 改设 计 参数 就 能 快 速 建 模 和 修 改 模 型 ,大 大 提 高 了设 计 效 率 。 产 品装配 与机 构仿 真 是P r o / E 软件 中的 一项 重 要 功 能 ,使 得 原 来 难 以表 达 和设 计 的机 械 运 动 ,可 以 在 虚 拟 的工 作 环 境 中 进 行运 动 模 拟 和 干 涉 检 查 ,
1 内齿轮参数化设计
1 . 1创建设计参数 在 利用P r o / E进 行 参 数 化 建 模 时 ,首 先 要 设
基于Pro/E转K2型转向架的三维建模与仿真

是 在 很直 观 的三维 环 境 下进 行 。 越 于传 统 的工程 设 优
计 方法 。 1 . 关联和 参数 化设 计 2
摩 擦 特 性 的高 分 子 新 材 料 摩 擦 副 ,可 以改 善 车辆 的
减振 性 能 嘲 。 利 用 数 值 模 拟 方 法 研 究 转K 型 转 向架 目前 还 较 2 少 , 用P o E 采 r/ 建模 正 是 进行 数 值 模拟 的前 期 工 作 。 所 以对 其进 行研 究很 有必 要 。本文 以转K 型转 向架 为原 2 型 ,对各 个零 件 的C D 维 图样进 行 实体建 模 和虚 拟 A 二
基
【 摘
Po 转K 型转向架的三维建模 与仿真 r/ E 2
丁 晓 莉
f 原 铁 路 局 党 校 干 部 培训 中 心 , 太 山西 太原 0 0 1) 3 0 3
要 】 以现 代 三 维 建 模 方 法 为基 础 , 用 Po E 件 , 现 了转K 型 转 向 架 实 体 建 模 , 进 行 了运 动 仿 真 , 转 运 r/ 软 实 2 并 为
维普资讯
第2 3卷 第 3期( 总第 1 2期) 0
机 械 管 理 开 发
MEC HAN CAL I MANAGE ME AND NT DE VEL MEN 0P T
20 0 8年 6 月 J n.0 8 u 20
V 1 3 N . ( o12 o. o S N .0 ) 2 3 UM
高运 行速 度 为1 0k / 的新型 转 向架[ 该 转 向架采用 2 m h 2 1 。 的侧 架 弹性 交 叉 支撑 装 置 技术 。 改 善 货 车通 过 曲线 可 时 的性 能 和提 高 转 向架 蛇行 失 稳 临界 速 度 , 改 善 货 可
基于Pro_E的工业机器人机构设计与运动仿真[1]
![基于Pro_E的工业机器人机构设计与运动仿真[1]](https://img.taocdn.com/s3/m/4eb460bafd0a79563c1e727c.png)
基于Pro /E 的工业机器人机构设计与运动仿真陕西科技大学机电工程学院 兰 勇 文怀兴 白 路 工业机器人是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化生产设备[1]。
特别适合于多品种、变批量的柔性生产。
它对稳定提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用具有现实意义。
典型的工业机器人如焊接机器人、喷漆机器人、装配机器人等大多固定在生产线或加工设备旁边作业,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透[2]。
1 机器人Pro /E 三维建模与装配111 机器人机械结构方案设计与分析机器人手臂是执行机构中的主要运动部件,用来支承腕关节和末端执行器,并使它们能在空间运动。
为使机器人手臂能达到工作空间的任意位置和姿态,同时结构简单,容易控制,综合考虑后确定该机器人为6自由度,其中手臂和手腕各3个自由度,采用动作和轨迹更灵活的关节型机器人,如图1所示。
图1 关节机器人结构示意图112 Pro /E 三维建模Pr o /E 三维实体建模设计系统是美国参数化技术公司(PTC )的产品。
PT C 公司提出的单一数据库、参数化、基于特征和完全关联的概念从根本上改变了机械CAD /CAE /CAM 传统的概念,这种全新的设计理念已经成为当今世界机械领域的新标准[3]。
通过对工业机器人任务以及使用条件的分析并参考同类型机器人大体确定机器人各结构尺寸,然后在Pr o /E 三维实体建模下构建出机器人整体结构的三维模型和各臂膀构件的实体。
机器人部分零件三维模型如图2所示。
图2 主要零件三维图113 Pro /E 三维装配设计完成各零件建模后,在组件模式下进行装配。
用Mechanis m 模块对组件进行运动仿真,组件之间要有相对运动。
因此,在进行组件装配时,采用部分约束。
基于PRO/E的曲柄连杆机构的建模与仿真研究
0 引言
曲柄 连 杆机 构 是 自动 化设 备 中常用 机 构之 一 ,
它 可实 现 旋转 运 动 与直 线往 复 运动 问 的相 互 转化 。 本 文 对 曲柄 连 杆 机 构 进 行 建 模 、动 力 学 、仿 真 和
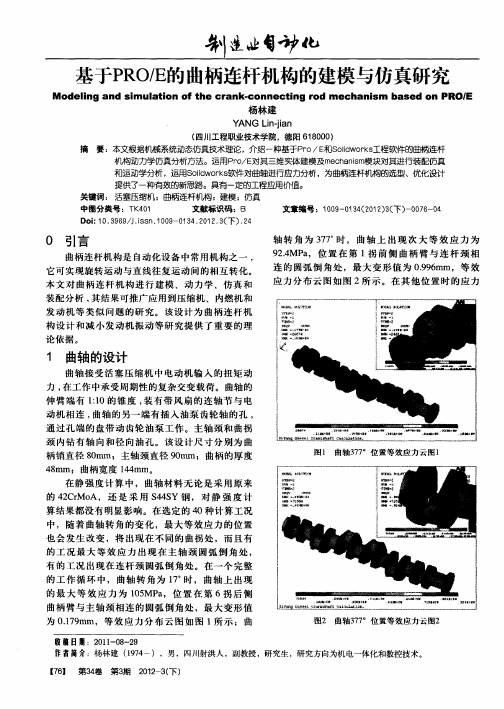
轴 转 角 为 3 7 时 , 曲 轴 上 出现 次 大 等 效 应 力 为 7。 9. a 24 MP ,位 置 在 第 1拐 前 侧 曲 柄 臂 与 连 杆 颈 相 连 的 圆 弧 倒 角 处 ,最 大变 形 值 为 09 6 . mm,等 效 9 应 力分 布 云 图如 图 2所 示 。在 其 他 位 置 时 的 应 力
务l 匐 似
基于P OE 曲柄连杆机构 的建模 与仿真研 究 R /的
M odelng and s m ul i he cr i i aton oft ank- conn ectng r ech i od m ani m s bas ed on PRO/ E
柄 销 直径 8 mm;主轴 颈 直径 9 rm; 曲柄 的厚 度 0 0 a 4 mm;曲柄 宽度 14 8 4 mm。
图 1 曲轴 37 7 。位 置 等 效 应 力云 图 1
在 静 强 度 计 算 中 ,曲 轴材 料 无论 是 采 用 原 来
的 4 C Mo 2 r A,还 是 采 用 ¥ 4 Y钢 , 对 静 强 度 计 4S
算 结 果都 没 有 明显 影 响 。在选 定 的 4 o种计 算 工 况 中 ,随 着 曲轴 转 角 的 变化 ,最 大 等 效 应 力 的 位 置 也 会 发 生 改变 ,将 出现 在 不 同 的 曲 拐处 出现 在 主 轴 颈 圆 弧 倒 角 处 , 有 的工 况 出现 在 连 杆 颈 圆弧 倒 角处 。在 一 个 完 整 的工 作 循 环 中 , 曲轴 转 角 为 1。 , 曲轴 上 出 现 7时
基于Pro/E的曲柄摇杆机构的运动仿真研究

经 典
压缩 百 分 比
4 21 O
4 K 2l
空 间 分 割 的 局 部 KD 树动 态创建算 法 , 可 以 在保 证 搜 索 结 果正
1 引 言
而 且 降低开 发成 本 和周期 。
2 曲柄摇 杆 机构 的数 学模 型
在 机械 设计 的实 际过程 中 , 杆 机构 是应 用较 简 单 、 连 较 方便 的一种 机构 ,特别是 曲柄摇 杆机 构 的应 用 尤其 广
泛 。为 _ r分析 机构 是 否满 足给 定 的运 动规 律 和运 动 空间
圃固四唾匾殛
仿■ , 建穗 I A C C DI AMI AE CA P C I P
基 rE 柄 杆 构 运动 真 究 于Po 的曲 摇 机 的 仿 研 /
安 爱 琴 。 逢 明 华 , 聂 永 芳
( 河南 科 技 学 院 机 电学 院 , 南 新 乡 4 3 0 ) 河 5 0 3
Th o i n S m u a i n S ud f t e Cr nk - o k r M e h n s Ba e n Pr / e M to i l to t y o h a — c e r c a i m s d o o E
在 对 曲 柄 摇 杆 机
构 建模 之 前 , 先对Fra bibliotek曲 首 分析, 并设 计 各构 件 尺
的要 求 , 要对 机构 的运 动规 律进 行研 究 。 构 的运 动规 柄 摇 杆 机 构 进 行 位 置 需 机
律分 析 比较 困难 ,难 以在机 构设 计 完成 之后 准 确判 定其
智能联合收割机多功能虚拟仿真实训系统设计与应用

工作研究农业开发与装备 2023年第8期智能联合收割机多功能虚拟仿真实训系统设计与应用金文忻1*,金 峰2,孔德志1,赵梦龙1,李巢湖3(1.江苏农林职业技术学院,江苏句容 212400; 2.江苏省交通技师学院,江苏镇江 212028; 3.无锡林农软件科技有限公司,江苏无锡 214000)摘要:为解决智能联合收割机教学与实训受设备条件、学生理解程度有限等问题,本项目开发了智能联合收割机多功能虚拟仿真实训系统。
通过虚拟仿真原理系统掌握联合收割机各部分工作原理,通过虚拟仿真排故系统掌握联合收割机工作过程中常见的故障诊断方法和排故手段,通过虚拟仿真无人驾驶及监测系统掌握先进的无人驾驶智能装备安装调试及使用,并能在使用过程中完成参数设置及调整。
项目实现了信息技术与实践教学的深度融合,虚拟仿真技术的运用,可以对传统课堂上不好描述和展示的复杂内部结构及原理,隐蔽的知识点做立体化的展示,便于理解,提高教学质量。
关键词:虚拟仿真系统;智能联合收割机;实践教学;智能农业装备0 引言虚拟仿真实训系统是一种基于计算机技术实现的教育教学工具,通过计算机软件模拟真实的物理环境或工作场景,为学生提供了一个真实的学习实践环境[1]。
它可以模拟各种复杂的实际场景,避免学生在实际操作中受到伤害,保证学生安全的同时可以通过图形化界面进行交互操作,操作简单易学,不需要花费大量的时间去学习[2-3]。
虚拟仿真实训系统没有实际的物理限制,学生可以不断重复操作,直到掌握技能,且与实际设备和场地相比,虚拟仿真实训系统的成本较低,可以大大降低培训和教育成本。
习近平总书记指出,要大力推进农业机械化、智能化,给农业现代化插上科技的翅膀。
农业装备已向以CPS、NFC等互联网应用系统为技术手段的4.0智能时代[4-5]。
目前,一些大型农场已逐步开始使用智能作业收获装备,但我们的教学仍然停留在传统作业收获装备上,缺乏技术前沿性、先进性,学生掌握的技能不能适应智能化机具的发展维护要求[6-7]。
基于Pro/E的水草切割装置特征建模及运动仿真

复 式 割 刀 ,也 有 绳 索 做 切 割 器 ,割 幅 大 于 2 ;从 切 m
割 器 位 置 分 ,有 前 置 式 、后 置 式 、侧 置 式 3 种 。 9 S C 1 4 型 水 草 收 割 机 采 用 前 置 式 往 复 式 割 刀 的 GC一. 切 割 装 置 。 它 是 水 草 收 割 机 的重 要 组 成 部 分 ,作 业 对 象 为沉 水 植 物 ,并 且 割 刀 在水 下 工 作 ,决 定 了其 结 构 、 功 能 和 理 论 规 律 的 复 杂性 。 因 此 ,对 它 进行
维 工 程 图 ,为水 草 切 割 装 置 的 优 化 设 计 及 系 列 产 品 的 开 发 提供 了一 个 开 草 切 割 装 置 ;设 计 ;P o E r / ;特 征 建 模 ;运 动 仿 真 ;二 次 开 发 中 图 分 类 号 :¥ 2 .9T 1 2 1 2 59 ;H . 1 文 献标 识 码 :A 文章 编 号 :1 0 — 1 8 (0 60 - 0 8 - 0 0 3 8 X2 0 )7 0 9 4
参 数 化 设 计 就 显 得 尤 为 重要 。
南 京 理 工 大 学 采 用 并行 工 程 思 想 ,通 过 P o E r /
平 台 开 发 了 汽 车 制 动 器 集 成 设 计 系统 ,将 制 动 器 的 选 型 、设 计 计 算 、三 维 造 型 、 强 度分 析 、性 能 分 析
关键 技 术 。 运 用 P oE提 供 的二 次 开 发 工 具 P O R M A IY T B分 别 对 切 割 装 置 的非 标 准 件 和标 准 件 进 r/ RG A 、F M L A 行 特 征 建 模 和 建 库 。在 保 证 消耗 功 率 最 小 的前 提 下 首 先 对 拨 又 和 曲柄 的主 要 参 数 进 行 优 化 .然 后 通 过 切 割 图对 优 化 后 的参 数 进 行 检 验 ,并通 过参 数 化驱 动 生成 所 需 的三 维 立 体 图 ,根 据 自顶 向下 的设 想 对 切 割 装 置 各 部 件 进 行 自动装 配 ,并 在 一 定 的伺 服驱 动下 按 照 给定 的规 律 进 行 运 动 仿 真 ,输 出各 部 件 及 总 体 结 构 的二
基于ProE的路宝乘用车变速器操纵机构的设计-任务书

收集有关国内外微型及普及型汽车变速器操纵机构工艺相关资料,通过对变速器操纵机构工作条件的了解,提出变速器操纵机构的装配工艺方案,符合装配工艺设计方法规定,提出问题,提出自己的观点,解决问题,在Pro/ENGINEER参数化建模的基础上,进行装配建模虚拟装配过程,从而实现汽车变速器操纵机构的动态装配。其主要任务是用可视化手段研究和解决产品的可装配性问题。从设计方法、结构原理、材料及应用等方面分析微型车变速器操纵机构装配技术,提出自己的设计思想及加工方法。对不同挡位的拔叉、操作壳体、及相应的部件装配图等进行零件建模,对操纵机构的部件的基于Pro/E三维图建模;
2、熟悉零件图纸(提出有相应问题),熟练掌握工艺学、Pro/E:第5~6周(3月31日~4月13日)
3、据自已所学知识及实习工厂或其它修配厂提出装配工艺规划、装配序列,输助工具excel或word要有一定使用能力:第7~8周(4月14日~4月28日)
4、在Pro/E的环境中,建立起各个零部件的三维实体模型及中期检查:第9~12周(4月29日~5月25日)
[7]成大先.机械设计手册.化学工业出版社,2002.11
[8]张德永.Pro/ENGINEER数控加工(基础篇 ).清华大学出版社,2005.10
[9]熊志旺.SEAT发动机曲轴的结构及工艺性能分析研究[D].南京理工大学,2004
[10]岳陆游,胡天策,储亚峰.基于Pro/E三维夹具设计研究[J].机械工程师,2006.03
毕业设计(论文)任务书
学生姓名
院系ห้องสมุดไป่ตู้
汽车与交通学院
专业、班级
车辆工程
指导教师姓名
职称
副教授
从事
专业
基于ProE的轮辐式齿轮参数化设计及运动仿真

图10 齿轮2的速度加速度位移曲线
图7 建模完成的轮辐式齿轮 图8 齿轮传动的装配图
3.2 机构的运动仿真及分析
(1)机构的设置:首先,进入“应用程序/机构”中,定义齿
轮副,小齿轮和大齿轮的节圆半径分别输入25.5 mm和76.5 mm,
理论传动比为3;在小齿轮处定义伺服电机作为机构动力,速
度为50(°)/s;设置初始条件选用快照InitCond1。 因为不定义执
传动比i= ω1 = 0.872 7 =3,且转 ω 0.290 9
向相反,说明传动正确;通过
回放显示,齿轮传动过程中并
无干涉,说明建模过程正确。
图9 测量结果对话框
图5 薄板特征的创建图6 Fra bibliotek辐拉伸特征的草绘
完成轮辐特征的拉伸之后,对其进行【倒圆角】命令,边与 边之间的圆角半径设为1,轮辐与圆柱间的圆角半径设为2。 再 将轮辐的拉伸与倒圆角命令合成为【组】,进行轴阵列。 选取齿 轮几何中心作为阵列中心,阵列角度为60°,即可得到所有的 6个轮辐特征。 图7即为阵列完成后的完整的轮辐式齿轮。
设计与分析◆Sheji yu Fenxi
基于Pro/E的轮辐式齿轮参数化设计及运动仿真
杨凯程 (宿迁学院机电工程学院,江苏 宿迁 223800)
摘 要:运用Pro/E软件对轮辐式齿轮进行设计,主要包括参数化设计及轮辐特征的创建。 对齿轮机构进行虚拟装配,并进行运动仿 真和分析,分析结果用于机构性能的评估及进一步的优化设计。
单击【基准】工具栏中的【曲线】命令,在【曲线选项】中单 击【从方程】→【完成】命令,设置圆柱坐标类型,打开rel.ptd记 事本文件,建立如下方程[2]:
x=t*sqrt((da/db)^2-1) y=180/pi
基于Pro/E的跨座式单轨转向架分离装置运动仿真分析
( h n qn nvri , o e e f c aia e g er gC o g ig 0 0 0 C ia C o g igU ies y C l g h nc l n i ei ,h nqn 0 3 ,hn ) t l o me n n 车辆转向架与车体相分离的关键设备,其中沉降梁的旋转
控制 以及 平 台升降过程的水平I 盔转 向架分 离装 置 中相 当重要 。首先对该运 动的相关机 构进 行 了结构分
析, 并利用 P ( r/ = , E对沉 降梁回转 以及平 台升降运动进行仿 真 , 最后 实现 了对数 字油缸运 动规 律 的反 求 , 验 证 了水平保持机 构方案的 可行 } 研 究结果可 以为相似设备 的研 究与设计提供借 鉴。 生,
;S ieb a oai n lf r t gi c r e u ye poigPo fn l em t no h u H sd em rt o a dpa om l i ar dot m l n r/ i a yt oi en - b tn t f in s i b y E, l h o ft m r a c l d ri rsl da dte esblyo l e- o i c a i d nie , s l in 一 ei y n e eo e aiit f e lh l n m h s i ie t d £ i a o c l i s v n hf i v d ge n m s i f mu t s h n be ei est o ti q i di om t no ersac n eino s l eh ns u s a l d s n r o banr ur f r ai nt ee rha dd s i a m c a i e g e e n o h g f mi r m.
基于PRO/E的挖掘机液压轴的受力分析与仿真

2 液压挖掘机 运动轨迹分析
挖 掘机 的工 作 装 置 , 主要 由动 力 臂 , 杆 , 斗 和 斗 铲 三 个 为之提 供动力 的 液压缸 组 成 。工作 装 置 的各 部 件
均 采用 铰销 连接 , 过 液压 缸 的伸 缩 运 动 来 完 成 挖 掘 通
过 程 的作 业 运 动 。动 臂 下 铰 点 与 转 台连 接 , 由动 臂 液 压 缸支 承并 改变 动臂倾 角 , 臂缸 活 塞杆 伸缩 , 动 臂 动 使 绕 下铰 点转 动 , 到 动 臂 的升 或 降 。 斗杆 铰 接 在 动 臂 达 上端 , 斗杆 与动 臂 间 的相 对 位 置 由斗 杆 缸 控 制 。铲 斗 铰 接在 斗杆 前端 , 斗 缸 活 塞伸 缩 即 可使 铲 斗 绕 斗 杆 铲 端 部伸 缩 。为扩 大 转 角 范 围 , 用 连 杆 结 构 将 铲 斗 与 常
.
o A a dC f R E f M n AEo O/NGI E b h d l o c ai adM eh i y a caa s r C P NE R, ytemo ue f Meh n m ca c d nmi n l i wee s n n a y s
维普资讯
27 0 年第5 0 期
文章 编 号 :0 1 2 5 20 )5— 0 7一 3 10 —26 ( 07 0 0 1 o
・ 计与研 究 ・ 设
基于 P O E的挖掘机液压轴的受 力分析与仿真 R/
孙毅 , 李岚 , 玉霞 孔
( 南华大 学 机 械 工程 学院 , 湖南 衡 阳 4 10 ) 2 0 1 摘要 : 对液压 挖掘 机在 进行挖 掘 作业 时各杆 件 的运 动情 况 , P O E的 C M 和 C E功 能 为 基础 , 针 以 R/ A A 利 用 M c ai 和 Meh nc真 , 其 动 力臂 液压 轴 、 对 斗杆 液 压 轴 、 和铲 斗 液 压轴 进
基于Pro/E凸轮机构的设计仿真及运动分析
理论 / 发 ,设计 , 研 嗣造
基 rE 轮 构 设 仿 及 动 析 于Po 凸 机 的 计 真 运 分 /
陈云 召 , 王 豪 长江 大 学 机 械 工 程 学 院 , 北 荆 州 4 4 2 湖 3 0 0)
摘
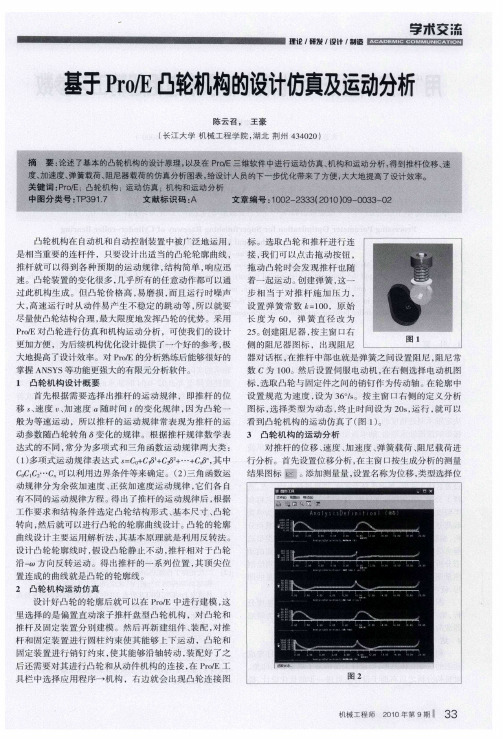
要: 论述 了基本的凸轮机构 的设计原理 , 以及在 Po 三 维软件 中 行 运动仿真 、 rE / 进 机构和运动分析 , 得到推杆位移 、 速
具 栏 中 选择 应 用 程序 一 机 构 ,右 边 就 会 出现 凸轮 连接 图
机械工程师 21 年 00 第9 3 期8 3
字木 交 ; 赢
理论 / 茧 / 研j 设计 , 造 制
侧 的阻 尼 器 图标 ,出现 阻 尼
器对 话 框 , 在推 杆 中部也 就 是 弹 簧之 间 设 置阻 尼 , 尼常 阻 数 c为 1 0 0 。然 后设 置 伺 服 电动机 , 右侧 选 择 电动 机 图 在
标 , 取 凸轮 与 固定 件之 间的销 钉 作 为传 动轴 。 轮廓 中 选 在
设 计 凸 轮轮 廓 线 时 , 设 凸 轮静 止 不 动 , 假 推杆 相 对 于 凸轮
沿一 ∞方 向反 转 运 动 。得 出推 杆 的一 系列 位 置 , 顶 尖位 其 置连成 的 曲线就 是 凸轮 的轮廓 线 。
2 凸轮 机构 运 动 仿真
设 计 好 凸轮 的 轮廓 后 就可 以在 Po r E中进 行 建 模 , / 这
凸轮机 构在 自动 机 和 自动控 制 装置 中被 广 泛地 运用 , 是相 当 重要 的连 杆件 ,只要设 计 出适 当的 凸轮 轮廓 曲线 , 推 杆就 可 以得 到各 种 预期 的运 动 规 律 , 构 简 单 , 结 响应 迅 速 。凸轮 装 置 的变化 很 多 , 几乎 所有 的任 意动作 都 可 以通 过 此机 构 生成 。但 凸 轮价 格 高 , 易磨 损 , 且 运行 时 噪 声 而 大 , 速 运行 时从 动 件 易产 生 不 稳 定 的跳 动 等 , 以就 要 高 所 尽量使 凸轮结 构合 理 , 大 限度 地发 挥 凸轮 的优 势 。采 用 最 Po r E对 凸轮 进行 仿 真和 机构 运 动分 析 ,可使 我们 的设 计 / 更加 方便 ,为后续 机构 优 化设 计 提供 了一 个好 的参考 , 极 大地 提高 了设计 效率 。对 Po r E的分 析熟 练后 能够很 好 的 / 掌握 A S S等功 能更强 大 的有 限元 分析 软件 。 NY
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
容 涵 盖 了 产 品 从 概 念 设 计 、三 维 模 型 设 计 、 分析 计
算 、动 态 模 拟 和仿 真 、工 程 图 的输 出 、生 产 加 工 成
产 品 的 全 过 程 ,以 及 模 具 设 计 与分 析 等 实用 模 块 。
DI =0. 8. 4 3 M; EN F DI
D = 6 / I 3 0 Z; D 2 3 0 Z 5 2 = 6 /
0 引言
运 用 P o E 软 件 , 计 人 员 可 以在 真 实 传 动 装 r/ 设 置 建 造 前 精 确 建 立 复 杂 减 速 器 系统 各 零 部 件 的 三 维 实 体 图 和 机 构 装 配 图 , 后 转 化 到 专 业 的 动 力 学 仿 而
真 软 件 下 , 加 复 杂 的力 和 约 束 , 终 形 成 系 统 的虚 添 最 拟 样 机 , 有 助 于 在 更 短 的 时 间 内提 供 更 好 的 产 品 。 并
设 计 ,不 仅 可 以 真 实 地 反 映转 向 机 构 的 几 何 形 状 , 还 能 反 映 出 各 部 件 空 间 位 置 ,有 效 地 检 测 工 作 装 置 的 各 部 件 是 否 发 生 干 涉 ,并 及 时 解 决 问题 。这 样 可 以省 去 制 造 样 机 进 行 反 复 实 验 、修 改 等环 节 ,大 大
维普资讯
Байду номын сангаас
20 0 6年 l 1月
农 机 化 研 究
第 l l期
基 于 P oE的履 带 式 联 合 收 割 机 转 向机构 的运 动 仿 真 l r
李 荣丽 。 ,冯 江 。 ,刘 小 明
( . 北 农 业 大 学 工 程 学 院 ,哈 尔 滨 I 0 3 ;2 黑 龙 江 省 农 业 工 程 职 业 技 术 学 院 ,哈 尔 滨 I 0 0 ) I东 500 . 5 0 0 摘 要 :主 要 介 绍 一 种 新 型 履 带 式 联 合 收 割机 转 向 机 构 三 维 实 体模 型 的 建 立 ,并 采 用 P o E g n e 仿 真 软 r /n i e r 件 中 的m c a i m 块 对 该 转 向 机构 进 行 仿 真 分 析 ,找 出 联 合 收 割 机 在 转 向 时 随 着 转 向半 径 的 变 化 ,左 右 履 ehnS模 带 所 需 的 转 向 阻 力 矩 、左 右 两 侧 履 带速 度 、整 车 速 度 的 变 化 曲线 。 关 键 词 :农 业 工 程 ;联 合 收 割 机 ;运 动 仿 真 ;转 向 机 构 中 图 分 类 号 :S2 5 3 2 . 文 献 标 识 码 :A 文 章 编 号 :1 0 — 1 8 2 0 ) 1 0 3 — 0 0 3 8 X( 0 6 1 — 1 1 2
R l t o ”添 加 如 下 关 系 式 : e a in
H =( A + ) M;H =( A + X X 木 A HXX木 F HXC—)M
D= Z; D M* A=D *H +2 A
1 Prl 仿 真 与分 析 模 块 oE
P o E g n e 是 由美 国 参 数 技 术 公 司 推 出 的 r/n ier
P 3 Z I D 2 3 0 2 Z 2 = — ; 7 = 6 /( * )
使 用 “ 生模 型 ” 操 作 命 令 ,通 过 输 入 参 数 模 再
数 、齿 数 z 、压 力 角 、齿 轮 宽 度 B、齿 顶 高 系
数 H x 齿 底 隙 系 数 和 变 位 系 数 ,然 后 利 用 特 a、 征 选 项 里 的拉 伸 、旋 转 、混 合 扫 描 及 阵 列 等 操 作 命 令 , 后 生 成 的 齿 轮 实 体 如 图 I 所 示 的 齿 轮 装 配 图 最 的 齿 轮 。再 利 用 特 征 选 项 里 的 拉 伸 、旋 转 、混 合 扫 描 及 阵 列 等 操 作 命 令 ,生 成 需 要 的 各 个 连 接 轴 。
本 文 结 合 履 带 式 联 合 收割 机转 向 机 构 实 例 谈 谈
P o E g n e 野 火 版 机 构 运 动 仿 真 与 结 构 分 析 模 r/n ier 块 的 应 用 。 用 三维 模 型 设 计 与 动 态 模 拟 仿 真模 块 , 应 借 助 P o E g n e 软 件 进 行 转 向 机 构 的三 维 实 体 r/n ier
缩 短 了 产 品 的 开 发 周 期 ,降 低 了产 品成 本 。
2 建 立 履 带式 联 合 收 割 机 转 向机 构 模 型
由于 履 带 车 辆 的 特 殊 行 驶 原 理 决 定 了其 特 殊 的
转 向 过 程 。 水 田 工 作 中 的 中小 型 水 稻 联 合 收 割 机 , 在 不 仅 要 有 良好 的 通 过 性 能 ,而 且 要 有 良好 的 转 向性 能 。 转 向是 否 灵 活 ,转 向半 径 的 大 小 影 响 到 收 割 的
质 量 、效 率 、燃 油 经 济 和 驾 驶 员 的 劳 动 强 度 。因 此 , 对 新 型转 向 机 构 的 要 求 越 来 越 迫 切 。
2 1 建 立 各 个 模 型 . 圆 柱 齿 轮 的参 数 化建 模 …。 过 P o r m> d t 通 r g a E i D S g 打 开 编 辑 器 , 在 “R l t o e in e a i n” 和 “ n Ed
收 稿 日 期 : 2 0 — 5 2 0 60 - 0
一
D=*O APA B D C S( L H ):D = - * F FD2H D = 6 /( 木 ); D = 630 4Z 9B
I H F AX<I; DI =0. .M 4 46 E DI N F: I HA =1 F X>
套 博 大 精 深 的 三 维 C D C M参 数 化 软 件 系统 , 内 A/A