PROE做齿轮运动仿真机构的详细过程。
proe齿轮齿条传动仿真技巧

1、必须有一个滑块配合。
2、齿轮必须是销钉配合。
3、以上完成后在--应用程序-上选择--机构--找到-齿轮-图标点击。
选择齿轮齿条,齿轮选择销钉配合轴,齿条选择滑块配合轴。设置-分度圆-直径。
-------------
---分割线----
-------的配合技巧。吧齿条设置为滑块配合,再选择齿条的滑块为齿条传动轴。
5、设置齿条固定,齿轮动的配合技巧。齿轮配合在‘有滑块配合的零件’齿条为固定配合。选择滑块配合的零件为齿条传动轴。
以上为简单的介绍,有一定基础的朋友才能明白。
有朋自远方来,欢迎讨论学术问题,---7个齿轮7个齿条2螺栓7螺母3电气37弹簧04对称制作。
ProE Wildfire 5.0高级案例-齿轮机构仿真

案例:齿轮机构运动仿真
案例背景:
齿轮机构是用来传递空间任意两轴间的运动和动力. 齿轮机构的有点就是:结构紧凑,工作可靠,效率高,寿命长.
模型文件
案例建模所要用到的工作台:
装配工作台
案例建模时间 1.5小时
视频文件在光盘Pre/E-A05中
机构分析:
机构分析
该机构包括齿轮和齿条两种传动零件.
设计步骤
步骤8:选择菜单"应用程序"|"机构"进入机构环境
设计步骤
步骤9:选择菜单"编辑"|"连接",检查装配连接.
设计步骤
步骤10:单击"定义齿轮副连接"按钮 置传动比为14:34. ,定义圆锥齿轮连接,设
设计步骤
步骤11:单击"定义齿轮副连接"按钮 条比为180. ,定义齿条连接,设置齿
设计步骤
步骤16:定义质量属性,单击"定义质量属性"按钮 下拉类表中选择"组件",选择整个机构. ,在"参照类型"
设计步骤
步骤17:单击"定义阻尼器"按钮 20. ,添加阻尼器,将阻尼系数定义为
设计步骤
步骤18:单击"机构分析"按钮 单击"运行"按钮. ,在"类型"下拉列表中选择"动态",
设计步骤
步骤19:单击"生成分析的测量结果"按钮 ,进行结果分析.
小结
通过本例可以具备以下软件使用能力 创建凸轮机构运动仿真环境的能力. 创建带有载荷的运动仿真能力. 测量项目设置和检测结果的获取能力.
Proe5.0柱形直齿轮建模详细图文教程

图 1 “参数”对话框
(3)在“参数”对话框内单击 按钮,可以看到“参数”对话框增加了一行,依次输 入新参数的名称、值、和说明等。
需要输入的参数如表 1 所示。
表 1 齿轮参数设置
名称
值
说明
名称
值
说明
z
25
齿数
ha
0
齿顶高
m
3
模数
hf
0
齿根高
angle
20
压力角
da
0
齿顶圆直径
hax
1
齿顶高系数
d
0
图 17 “基准轴”对话框
图 18 “基准轴”创建完成 -8-
(5)在工具栏内单击 按钮,或者依次在主菜单上单击“插入”→“模型基准”→“平
面”,系统弹出“基准平面”对话框。 (6)在绘图区单击选取“A_1”轴作为参照,按住Ctrl键,继续单击基准点“PNT0”作
为参照,如图19所示,点击确定完成基准面“DTM1”的创建。
图 24 完成后的镜像渐开线
- 10 -
5. 创建齿根圆 (1)在工具栏内单击 按钮,或者依次在主菜单内单击“插入”→“拉伸”,弹出 “拉伸”定义操控面板,在面板内单击“放置”→“定义”,弹出“草绘”定义对话框。 (2)选择“FRONT”面作为草绘平面,选取“RIGHT”面作为参考平面,参考方向为向 “顶”,如图25所示。单击【草绘】进入草绘环境。
PROE中齿轮副运动仿真的制作

在PROE中进行单级圆柱齿轮副的运动仿真 在新的PROE(3以上版本)中可以使用齿轮副连接方式控制两个连接轴之间的速度关系,齿轮副中的每个齿轮都需要有两个主体和一个接头连接。
第一主体(指定为托架)通常保持固定不动。
第二主体能够运动,根据所创建的齿轮副的类型,可称为齿轮 、小齿轮或齿条。
齿轮副连接可约束两个连接轴的速度,但是不能约束接头连接的主体相对空间方位。
在齿轮副中,两个运动主体的表面不必相互接触就可以工作,因为齿轮副被视为速度约束。
并非基于模型几何,因此可直接指定齿轮比。
下面结合实例介绍使用齿轮副连接方式控制输入轴与输出轴之间速度比的基本操作方法,请注意体会其中的技巧知识。
创建单级圆柱齿轮减速器机构,然后进行运动仿真。
设计步骤一.新建一个名为“asm17-2”的文件(装配文件),采用毫米、牛、秒单位制,进入PROE的装配模块二.首先向装配文件中调入第一个零件“BASE.prt”,(这是一个装配的支架性的零件)操作过程如图所示:1选择“插入”,“元件”,“装配”命令或单击调入按钮,然后在系统弹出的“打开”对话框中选取零件“BASE”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击常规装配约束类型中的按钮表示系统将在默认位置装配该元件,即将该零件定义为机构的基础主体。
三.调入零件“gear1.prt”,然后创建第一个销钉连接,操作过程如下1选择“插入”,“元件”,“装配”命令或单击调入按钮然后在系统弹出的“打开”对话框中选取零件“gear1.prt”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击预定的连接集中的“销钉”连接方式。
在该零件(gear1)上选择轴线,在第一个零件(BASE)上选择轴线以定义轴对齐约束,然后分别选择两零件的对应圆柱端面以定义平移约束。
proe运动仿真教程
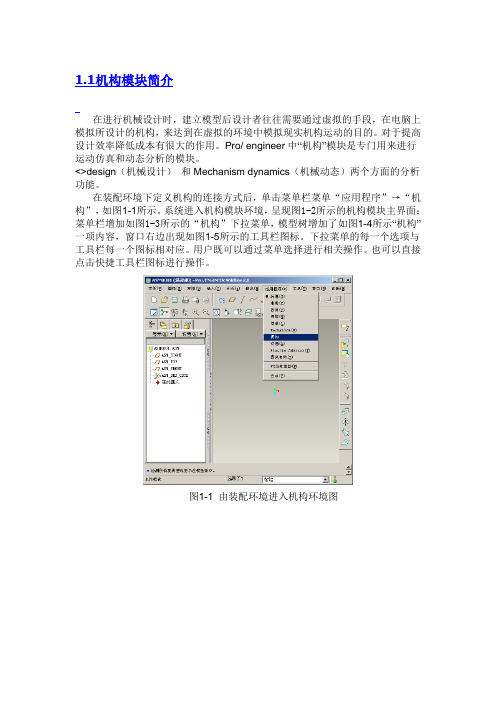
图 1-16元件放置对话框 图 1-16 元件放置后图
(5)<> 卡,对话框变成如图1-17默认连接的名称为 connnection_1,按照图 1-19a.pb.prt 的 轴 A1 轴 端 大 端 面 和 b.p , 完 成 后 如 图
1<> <>图1-17 连接中的轴对齐图 图1-18 连接中的平移图
<><> <>
连接元件和附着元件之间没有任何相对运动,六个自由度完全被约束了。 焊接将两个元件连接在一起,没有任何相对运动,只能通过坐标系进行约束。 刚性连接和焊接连接的比较: (1)刚性接头允许将任何有效的组件约束组聚合到一个接头类型。这些约束可 以是使装配元件得以固定的完全约束集或部分约束子集。 焊接接头的作用方式与其它接头类型类似。但零件或子组件的放置是通过 对齐坐标系来固定的。 (3)当装配包含连接的元件且同一主体需要多个连接时,可使用焊接接头。焊 接连接允许根据开放的自由度调整元件以与主组件匹配。 (4)如果使用刚性接头将带有“机械设计”连接的子组件装配到主组件,子组 件连接将不能运动。如果使用焊接连接将带有“机械设计”连接的子组件 装配到主组件,子组件将参照与主组件相同的坐标系,且其子组件的运动 将始终处于活动状态。
1-19 <> <>Pro/E 提供了十种连接定义。主要有刚性连接,销钉连接,滑动
杆连接,圆柱连接,平面连接,球连接 焊接,轴承,常规,6DOF(自由度)。最后两种是 野火2.0新增加的。 连接与装配中的约束不同,连接都具有一定的自由度,可以进行一定的运动 接头连接有三个目的:
◊ 定义“机械设计模块”将采用哪些放置约束,以便在模型中放置元件;
PROE教程--齿轮教程
PROE教程--齿轮教程齿轮教程1第一步新建一个文件File > New... > 出现新建文件对话框 > 输入新文件名:gear > OK 第二步建立第一条曲线> Sketch | Done> 选择绘图平面:FRONT> OK> Top > 选择参考平面:TOP> 绘制如图剖面>> OK> 完成第一条曲线的绘制第三步修改曲线的名称Set Up > Name > Feature > 在模型树选择曲线 > 输入新的名称:PITCH_DIAMETER> Done> 回到PART菜单第四步修改尺寸的名称Modify > 在模型树选择曲线 > 在零件窗口出现尺寸,如图> DimCosmetics > Symbol > 选择尺寸,如图> 输入新的名称:PCD> Done> Done> 回到PART菜单第五步建立两个参数Set up > Parameters > Part > Create > Real Number > 输入第一个参数名称:m> 直接回车(由于这个参数的值是由方程控制的,所以这里不用输入数值) > Real Number> 输入第二个参数名称:no_of_teeth> 输入数值:25> Done/Return> Done> 回到PART菜单第六步输入方程式 Relations > Add> 输入方程式:m=PCD/no_of_teeth > 回车> 再一次回车以结束方程式的输入> Done> 回到PART菜单第七步绘制第二条曲线> Sketch | Done > Use Prev> Okay> 绘制如图剖面>> OK> 完成第二条曲线的绘制第八步修改第二条曲线的名称Set Up > Name > Feature > 在模型树选择第二条曲线 > 输入新的名称:ADDENDUM_DIAMETER> Done> 回到PART菜单第九步修改第二条曲线尺寸的名称Modify > 在模型树选择第二条曲线 > 在零件窗口出现曲线的尺寸> DimCosmetics > Symbol > 选择第二条曲线的尺寸> 输入新尺寸名称:ADD_DIAMETER > Done> Done> 回到PART菜单第十步输入第二条方程式Relations > 选择第二条曲线 > 这时零件窗口显示零件尺寸的名称,如图> Add> 输入方程式:ADD_DIAMETER=PCD+2*m > 回车 > 再一次回车以结束方程式的输入 > Done> 回到PART菜单第十一步绘制第三条曲线> Sketch | Done> Use Prev> Okay> 绘制如图剖面>> OK> 完成第三条曲线的绘制第十二步修改第三条曲线的名称 Set Up > Name > Feature > 在模型树选择第三条曲线> 输入新的名称:DEDDENDUM_DIAMETER> Done> 回到PART菜单第十三步修改第三条曲线尺寸的名称 Modify > 在模型树选择第三条曲线 > 在零件窗口出现曲线的尺寸,如图> DimCosmetics > Symbol > 如图所示尺寸> 输入新尺寸名称:DED_DIAMETER> Done> Done> 回到PART菜单第十四步输入第三条方程式Relations > 选择第三条曲线 > 这时零件窗口显示零件尺寸的名称,如图> Add> 输入方程式:DED_DIAMETER=PCD-2*(m+(3.1415*m/20)) > 回车> 再一次回车以结束方程式的输入> Done> 回到PART菜单第十五步绘制第四条曲线> Sketch | Done> Use Prev> Okay> 绘制如图剖面>> OK> 完成第四条曲线的绘制第十六步修改第四条曲线的名称 Set Up > Name > Feature > 在模型树选择第四条曲线> 输入新的名称:BASE_DIAMETER > Done> 回到PART菜单第十七步修改第四条曲线尺寸的名称Modify > 在模型树选择第四条曲线 > 在零件窗口出现曲线的尺寸,如图> DimCosmetics > Symbol > 如图所示尺寸> 输入新尺寸名称:BASE_DIAMETER> Done> Done> 回到PART菜单第十八步建立一个参数Set up > Parameters > Part > Create > Real Number > 输入参数名称:pressure_angle> 输入数值:20> Done/Return> Done> 回到PART菜单第十九步输入第四条方程式Relations > 选择第四条曲线 > 这时零件窗口显示零件尺寸的名称,如图> Add> 输入方程式:BASE_DIAMETER=PCD*cos(pressure_angle) > 回车> 再一次回车以结束方程式的输入> Done> 回到PART菜单第二十步建立第五条曲线> Sketch | Done> Use Prev> Okay> 绘制如图剖面>> OK> 完成第五条曲线的绘制第二十一步修改第五条曲线的名称 Set Up > Name > Feature > 在模型树选择第五条曲线> 输入新的名称:TOOTH> Done> 回到PART菜单第二十二步修改第五条曲线尺寸的名称Modify > 在模型树选择第五条曲线 > 在零件窗口出现曲线的尺寸 > DimCosmetics > Symbol > 分别将对应的尺寸改成如图所示的名称> Done> Done> 回到PART菜单第二十三步建立方程式Relations > 选择第五条曲线 > 这时零件窗口显示零件尺寸的名称,如图> Add> 输入方程式:TOOTH_RAD=PCD/8 > 回车 > HALF_TOOTH_TK=3.1415*m/4 > 回车> TIP_RAD=3.1415*m/8 > 回车> 再一次回车以结束方程式的输入> Done> 回到PART菜单第二十四步建立两个参数Set up > Parameters > Part > Create > Real Number> 输入参数名称:helix_angle> 输入数值:15> Real Number> 输入参数名称:face_width> 输入数值:100> Done/Return> Done> 回到PART菜单第二十五步复制曲线Feature > Copy > Move | Select | Independent | Done > 选择TOOTH曲线> Done> Translate> Plane> 选择FRONT平面> Flip | Okay> 输入数值:face_width*cos(helix_angle)/3 (注:这里可以用方程式代替,这里为了简便,就不写出来了,但我已给出完整的公式,你只需将公式代出相应的尺寸名称就可以了。
ProE中斜齿轮的创建与运动仿真

Pro/E中斜齿轮的创建与运动仿真一、斜齿轮的建模分析建模分析(如图1-1所示):(1)输入参数、关系式,创建齿轮基本圆(2)创建渐开线(3)创建扫引轨迹(4)创建扫描混合截面(5)创建第一个轮齿(6)阵列轮齿图1-1渐开线斜齿圆柱齿轮建模分析二、斜齿轮的建模过程1.输入基本参数和关系式(1)单击,选择“零件”,在新建对话框中输入文件名“hecial_gear”,然后单击;(2)在主菜单上单击“工具”→“参数”,系统弹出“参数”对话框,如图2-1所示;图2-1参数”对话框(3)在“参数”对话框内单击按钮,可以看到“参数”对话框增加了一行,依次输入新参数的名称、值、和说明等。
需要输入的参数如表3-2所示;名称值说明名称值说明Mn6法面模数HA___齿顶高Z34齿数HF___齿根高ALPHA20压力角X0变位系数BETA16螺旋角D___分度圆直B50齿轮宽度DB___基圆直径HAX 1.0齿顶高系数DA___齿顶圆直径CX0.25顶系系数DF___齿根圆直径注意:表2-1中未填的参数值,表示是由系统通过关系式将自动生成的尺寸,用户无需指定。
完成后的参数对话框如图2-2所示:图2-2“参数”对话框(4)在主菜单上依次单击“工具”→“关系”,系统弹出“关系”对话框,如图2-3所示;(5)在“关系”对话框内输入齿轮的分度圆直径关系、基圆直径关系、齿根圆直径关系和齿顶圆直径关系。
由这些关系式,系统便会自动生成表3-2所示的未指定参数的值。
输入的关系式如下:/*齿轮基本关系式(可不用输入,只做解释用)ha=(hax+x)*mnhf=(hax+cx-x)*mnd=mn*z/cos(beta)da=d+2*hadb=d*cos(alpha)df=d-2*hf完成后的“关系”对话框如图2-3所示;图2-3 “关系”对话框2.创建齿轮基本圆(1)在工具栏内单击按钮,系统弹出“草绘”对话框;(2)选择“FRONT”面作为草绘平面,选取“RIGHT”面作为参考平面,参考方向为向“右”,如图2-4所示。
ProE实例训练教程—齿轮类零件

Pro/E实例训练教程—齿轮类零件1. 圆柱齿轮(1)建立新零件。
单击系统工具栏新建按钮图标,输入零件名称chilun,选择“mmns-part-solid”模板。
(2)设置参数单击系统菜单栏中【工具】→【参数】,出现【参数】对话框,单击添加参数按钮,添加m、z、alpha三个参数,如图2-所示,单击【确定】。
图2- 设置参数图2-(3)添加关系单击系统菜单栏中【工具】→【关系】,出现【关系】对话框,在【关系】文本框中输入如图2-所示关系式。
(4)草绘基准曲线1)单击草绘基准曲线按钮,选择FRONT面为草绘平面,其余选择默认设置。
2)草绘三个同心圆如图2-所示,分别修改直径为d、da、df,系统弹出如图2-所示提示对话框,单击【是】。
图2- 草绘三个圆图2- 提示对话框(5)基准曲线1) 单击基准曲线按钮,系统打开【曲线选项】菜单管理器,如图2-所示,单击【从方程】→【完成】。
2) 在图形区单选择坐标系,在【设置坐标类型】菜单管理器中选择【柱坐标】,在记事本中输入如图2-所示的方程,单击【文件】→【保存】→【退出】。
3) 单击【曲线:从方程】对话框中【确定】。
创建齿轮渐开线,如图2-所示。
图2-【曲线选项】菜单管理器 图2- 记事本 图2- 渐开线(6)基准轴线1) 单击右边工具栏基准轴线按钮,在图形区选择TOP 面和RIGHT 面,过这两个面创建一条基准轴线A-1,如图2-所示。
图2- 基准轴线 图2- 基准点面板 图2- 创建基准点(7)基准点单击右边工具栏基准点按钮,系统打开基准点面板如图2-所示,在图形区选择分度圆和渐开线,过这两条线创建基准点PNT0,如图2-所示。
(8)基准面单击右边工具栏基准面按钮,在图形区点选步骤(6)创建的基准轴线A-1和步骤(7)创建的基准点PNT0,过这两个图元创建基准面DTM1,如图2-所示。
渐开线图2- 创建基准面DTM1 图2-复制基准面DTM2 图2- 镜像渐开线(9)复制基准面1)单击系统菜单栏中的【编辑】→【特征操作】,打开【特征】菜单。
ProE机构运动仿真设计及分析

活塞连杆机 构的装配注 意需要添加 两个连接。 连杆大头销 钉连接到曲 柄销,活塞 在缸孔内滑 动杆连接。
运动影片
三、机构动力学分析
在5.0中,运动仿真和动态分析功能集成于机构模块中,包括机械设计和动态分析 两方面的分析功能. 在机构动力学分析中简单一种的是不涉及重力、弹簧、阻尼、力和力矩等的 分析,实现机构的运动模拟,可以观察并测量记录如位置、距离、速度、加速度 等运动特征,并可以通过图形直观地显示这些测量值。 另外一种可以在机构上定义重力、弹簧、阻尼、力和力矩等特征,对机构设 置材料、密度等属性,使其更加接近现实中的机构,达到真实模拟现实的目的。
活塞连杆机构装配
先装连杆,采用坐标系 对齐方式
采用销钉连接装配活塞销, 对齐中间平面
销钉连接装配活塞,注意需 选择同一主体的轴和平面
技巧:装配完成后可以按住键,按鼠标左 键拖动零件可检查零件的运动情况。
曲轴及活塞连杆机构装配
基础件机 体按坐标 系对齐装 配,曲轴 按销钉连 接装配到 缸体上, 对齐止推 轴承中心 面。
新建装配, 装配缸体或 骨架模型
曲轴按销钉 连接装配到 基础上
分别按销钉连接和滑 动杆连接装配活塞连 杆机构的连杆大头和 活塞
此机构中基础件为机体(也可以用机体总成骨 架),活塞在气缸中上下运动,不能旋转,活塞 采用滑动杆连接。关键有四组相同的活塞连杆机 构,因此活塞连杆可单独装配成一个小机构,然 后再往曲轴和缸体上连接。
机构连接形式:
序号
1 2 3 4 5 6 7 8 9 10 11
名称
自由度 旋转 平移
0
0
1
0
0
1
1
1
说明
使用一个或多个基本约束,交元件与组件连接在一起,连接后,元件与组件成为一个 主体,相互间没有自由度。 由一个轴对齐约束加一个与轴垂直的平移约束组成。元件可以绕轴旋转,不能平移。 例如,活塞销,齿轮、曲轴等。 由一个轴对齐约束与一个旋转约束组成,元件可沿轴平移,但不能旋转。如活塞。 由一个轴对齐约束组成,元件可绕轴旋转同时可沿轴向平移。如挺柱、气门等。
PROE做齿轮运动仿真机构的详细过程
PROE做齿轮运动仿真机构的详细过程齿轮运动仿真机构是一种用于实现齿轮系统运动仿真的装置,能够模拟齿轮和传动件在运动过程中的相对运动关系,用于预测和分析齿轮系统在不同工况下的运动性能和传动特性。
下面将详细介绍PROE(即现在多数被称为PTC Creo)软件制作齿轮运动仿真机构的过程。
第一步:建立齿轮模型1.打开PROE软件,选择“新建”新建一个零件。
2.根据实际齿轮的参数,使用绘图工具绘制齿轮的几何图形,包括齿数、齿轮直径、法向压力角等参数。
3.随后,利用特征操作命令,例如旋转、修剪、倒角等,对齿轮模型进行修整,使其符合实际需求。
第二步:建立约束1.在齿轮模型上选择一个轴线,作为齿轮运动的旋转轴。
2.新建一个“约束组”来管理后续创建的约束。
3.使用“旋转关节”命令将齿轮相对于旋转轴固定。
4.在约束组中继续创建其他约束,例如平行、垂直、距离等,以限制齿轮运动。
第三步:建立运动关系1.打开“运动关系”界面,选择“新建”创建一个新的运动关系。
2.根据需要,选择合适的运动类型,例如旋转、滑动等。
3.选择齿轮和其他关联几何体,建立相应的运动关系。
4.设定齿轮的运动参数,例如角速度、角加速度等。
第四步:修改齿轮模型参数1.在齿轮模型中修改各种参数,例如齿数、齿宽、模数等。
2.运用“更新”功能可以实时更新齿轮模型的几何形状及尺寸。
第五步:运行仿真1.进入“运动仿真”界面,点击“运行”按钮开始仿真。
2.根据所建立的运动关系和约束,仿真系统会模拟齿轮的运动过程。
3.可以观察到齿轮与齿轮之间的相对运动、接触点位置等。
4.在仿真过程中可以调整参数,观察不同参数对齿轮运动的影响。
第六步:分析仿真结果1.在仿真过程中会生成大量的仿真数据,可以用于分析齿轮系统的运动性能。
2.可以查看齿轮之间的接触应力、摩擦力、扭矩等数据。
3.根据仿真结果评估齿轮系统的传动效率、功耗、噪声等特性。
第七步:优化设计1.根据分析结果,对齿轮系统进行优化设计。
PROE齿轮教程

第十三步 去除齿面材料
选择“拉伸” 草绘,在front基准面上绘制圆速度sd0 选择菜单【工具】\【关系】,添加如下的关系: sd0=db-10
设置拉伸深度为5,去除材料
第十四步 去除另一面齿面材料
选择菜单【编辑】\【特征操作】 选择“复制”、“移动”、选择前面创建的特征、“平移”、“坐标 系”、”Z轴“、移动25
第七步 镜像渐开线
选择渐开线 选择菜单【编辑】\【镜像】 以基准面DTM2为镜像面
第八步 创建直径为da的宽度为30的圆柱体
选择“拉伸” 草绘,在front基准面上绘制直径为da的圆(可以使用
功能)
设置拉伸深度为30
第九步 倒角
将前面创建的圆柱体两边倒角2X2
第十步 创建第一个齿槽
改变参数Z和m
第十八步 创建斜齿轮
增加一个螺旋角 螺旋角参数方程 s=w*t
a=s*tan(b)*180/(r*pi) x=r*cos(a) y=r*sin(a) z=s r-基圆半径 w-齿宽
第十七步 创建轴孔
选择“拉伸” 草绘,在front基准面上绘制如图所示草绘 选择菜单【工具】\【关系】,添加如下的关系: sd0=df/3
设置拉伸深度为一侧为35,另一侧为5
第十八步 添加阵列参数
在模型树,点击阵列齿廓,在弹出的菜单上选择“编辑” 增加如图示三个关系 一个是齿数、一个是阵列时 选择的角度尺寸,一个是复制 时创建的角度尺寸
直齿轮设计
1 2 3 4 5 6 7 8 关系 参数 曲线 拉伸 倒角 拔模 阵列 复制
第一步 绘制基圆、分度圆、齿顶圆、齿根圆
草绘: 在Front基准面内绘制四个圆
结束,退出草绘
proe机构运动仿真教程(下)

proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
ProE机构运动仿真设计及分析
活塞速度的测量结果,也可导出为EXCEL和文本格式
测量特征也可加入到运动分析中,进行结果查看,图形输出,如测量连杆大头最外边 与缸体裙部的距离。
应将测量保存为一个特征,然后才能进行测量分析
回放:轨迹曲线
轨迹曲线用来表示机构中某一元素相对于另一零件的运动。分为“轨迹曲线”与“凸轮 合成曲线”两种: “轨迹曲线”表示机构中某一点或顶点相对于另一零件的运动。 “凸轮合成曲线”表示机构中某曲线或边相对于另一零件的运动。 菜单:插入--->轨迹曲线
序号
1 2 3 4 5 6 7
8 9 10 11
名称
自由度 旋转 平移
0
0
1
0
0
1
1
1
1
2
说明
使用一个或多个基本约束,交元件与组件连接在一起,连接后,元件与组件成为一个 主体,相互间没有自由度。 由一个轴对齐约束加一个与轴垂直的平移约束组成。元件可以绕轴旋转,不能平移。 例如,活塞销,齿轮、曲轴等。 由一个轴对齐约束与一个旋转约束组成,元件可沿轴平移,但不能旋转。如活塞。 由一个轴对齐约束组成,元件可绕轴旋转同时可沿轴向平移。如挺柱、气门等。
定义并约束相对运动的主体之间的关系。
自由度(Degrees 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的
of Freedom)
总自由度。
执行电动机( Force Motor)
作用于旋转轴或平移轴上(引起运动)的力。
机构(Joints)
特定的连接类型(例如销钉机构、滑块机构和球机构)
选取运动轴,曲柄连杆机构选 择曲轴的销钉连接图标 反向按钮改变旋向
定义轮廓,“规范”为位置时模选 项定义为斜坡曲轴旋转一圈360度, 图形中可以查看定义的轮廓,横坐 标为时间
齿轮ProE参数化建模
已知参数为:齿数z=34,模数m=2,压力角α=20°,建立直齿圆柱齿轮参数化建模。
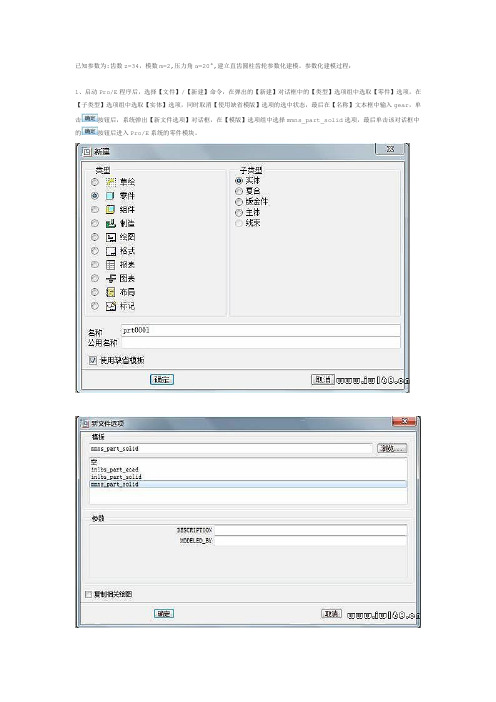
参数化建模过程:1、启动Pro/E程序后,选择【文件】/【新建】命令,在弹出的【新建】对话框中的【类型】选项组中选取【零件】选项,在【子类型】选项组中选取【实体】选项,同时取消【使用缺省模版】选项的选中状态,最后在【名称】文本框中输入gear,单击按钮后,系统弹出【新文件选项】对话框,在【模版】选项组中选择mmns_part_solid选项,最后单击该对话框中的按钮后进入Pro/E系统的零件模块。
2、设置尺寸参数单击菜单栏【工具】在下拉菜单单击【参数】,在【参数】对话框中添加尺寸的各个参数,如下图所示3、设置关系参数在主菜单上依次单击“工具” →“关系”,系统弹出“关系”对话框,并在“关系”对话框内输入齿轮的分度圆直径关系、基圆直径关系、齿根圆直径关系和齿顶圆直径关系,如下图所示:4、绘制齿轮基本圆(1)在工具栏内单击按钮,系统弹出“草绘”对话框。
选择“FRONT”面作为草绘平面,选取“RIGHT”面作为参考平面,参考方向为向“左”,如图2-1所示。
单击【草绘】进入草绘环境。
(2)在绘图区以绘图提供的原点为圆心,绘制四个同心圆,并且标注圆的直径尺寸。
在工具栏内单击按钮,完成草图的绘制,如下图所示:(3)在主菜单上依次单击“工具” →“关系”,系统弹出“关系”对话框。
在“关系”对话框中输入尺寸关系,通过该关系创建的圆即分别为分度圆、齿顶圆、齿根圆、基圆。
(4)在【关系】对话框中单击确定按钮,系统自动根据设定的参数和关系式再生模型并生成新的基本尺寸。
最终生成如下图所示的标准齿轮基本圆。
5、创建齿轮轮廓线在右工具箱中单击“基准曲线”按钮打开【曲线选项】菜单,在该菜单中选择【从方程】选项,然后选取【完成】选项。
系统提示选取坐标系,在模型树窗口中选择当前的坐标系,然后在【设置坐标类型】菜单中选择【笛卡尔】选项。
系统打开一个记事本编辑器。
基于ProE的轮辐式齿轮参数化设计及运动仿真

图10 齿轮2的速度加速度位移曲线
图7 建模完成的轮辐式齿轮 图8 齿轮传动的装配图
3.2 机构的运动仿真及分析
(1)机构的设置:首先,进入“应用程序/机构”中,定义齿
轮副,小齿轮和大齿轮的节圆半径分别输入25.5 mm和76.5 mm,
理论传动比为3;在小齿轮处定义伺服电机作为机构动力,速
度为50(°)/s;设置初始条件选用快照InitCond1。 因为不定义执
传动比i= ω1 = 0.872 7 =3,且转 ω 0.290 9
向相反,说明传动正确;通过
回放显示,齿轮传动过程中并
无干涉,说明建模过程正确。
图9 测量结果对话框
图5 薄板特征的创建图6 Fra bibliotek辐拉伸特征的草绘
完成轮辐特征的拉伸之后,对其进行【倒圆角】命令,边与 边之间的圆角半径设为1,轮辐与圆柱间的圆角半径设为2。 再 将轮辐的拉伸与倒圆角命令合成为【组】,进行轴阵列。 选取齿 轮几何中心作为阵列中心,阵列角度为60°,即可得到所有的 6个轮辐特征。 图7即为阵列完成后的完整的轮辐式齿轮。
设计与分析◆Sheji yu Fenxi
基于Pro/E的轮辐式齿轮参数化设计及运动仿真
杨凯程 (宿迁学院机电工程学院,江苏 宿迁 223800)
摘 要:运用Pro/E软件对轮辐式齿轮进行设计,主要包括参数化设计及轮辐特征的创建。 对齿轮机构进行虚拟装配,并进行运动仿 真和分析,分析结果用于机构性能的评估及进一步的优化设计。
单击【基准】工具栏中的【曲线】命令,在【曲线选项】中单 击【从方程】→【完成】命令,设置圆柱坐标类型,打开rel.ptd记 事本文件,建立如下方程[2]:
x=t*sqrt((da/db)^2-1) y=180/pi
Pro-E仿真运动
装配仿真动动组件:1、新建组件
2、新建用于装配的齿轮的基准轴
在AXES中新建两条(或3条…… )位一同一基准平面的基准轴, 两条间距即中心距112.5
缺省装配AXES到组件中
装配chilun1到组件中,选择chilun1中心轴与AXES中一条中心轴, 在约束转换为机构连接(包括:销钉、圆柱、滑动杆等) 销钉:由一个轴对齐约束和一个与轴垂直的平移约束组成。元件可以绕轴旋转,具有1个旋转自由度,总自由 度为1。轴对齐约束可选择直边或轴线或圆柱面,可反向;平移约束可以是两个点对齐,也可以是两个平面的 对齐/配对,平面对齐/配对时,可以设置偏移量。 圆柱:由一个轴对齐约束组成。比销钉约束少了一个平移约束,因此元件可绕轴旋转同时可沿轴向平移,具 有 1个旋转自由度和1个平移自由度,总自由度为2。轴对齐约束可选择直边 或轴线。 这里以默认圆柱装配
4、窗过基准点及中心轴创建一个基准平面DTM3
3、在齿轮2的任意内齿上创建基准中点
重定义chilun1装配,增加旋转轴约束,使用lun2装配,增加旋转轴约束,并调整角度到两齿轮没有干涉。 至此装配完成,接下来仿真定义。
了解下列术语在PROE中的定义:
主体Body) : 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接(Connections):定义并约束相对运动的主体之间的关系。 接头(Joints):特定的连接类型(例如销钉接头、滑块接头和球接头)。
平移轴选择两平面,并确认装配。 平移约束可以是两个点对齐,也可以是两个平面的对齐/配对,平面对齐/配对时,可以设置偏移量)
同样方法装配chilun2,如图可见,装配上齿轮有干涉, 接下来需要两齿轮各创建一个用于旋转的基准平面
2、窗过基准点及中心轴创建一个基准平面DTM3
ProE机构运动仿真.pptx

进入与退出机构模块
➢ 进入机构模块:装配环境-应用程序-机构 ➢ 退出机构模块:应用程序-标准
机构运动仿真与分析流程
装配 模型
机构 模块
机构 连接
分析 回放
伺服 电动机
分析 测量
01 02 03 04 05 06
案例流程
01
02
03
04
05
06
07
C 教学小结
教学小结
装配模型
机构环境
机构分析
一起High—Pro/E机构运动仿真
A 任务导入
任务导入
连杆机构
齿轮机构
01
03
齿轮机构
02
04
汽车引擎 蝴蝶飞舞
B 教学过程
课堂学习
有趣的人形波浪仿真,一起玩起来! 素材
知识点
操作 流程
素质 目标
机构运动仿真基础
概述
➢ 在Pro/E的的机构模块中,可以对一个机构装 置进行运动仿真分析,除了查看机构的运行状 态,检查机构运行时有无碰撞外,还能进行进 一步的位置分析、运动分析、动态分析、静态 分析和力平衡分析,为检验和进一步改进机构 的设计提供参考数据。
“ 01
“ 02
“ 03
➢ Pro/E提供多种“连接”类 型、各种连接类型允许不同 的运动自由度、每种连接类 型都与一组预定义的约束集 相关联。
➢ 定义运动副 凸轮运动副、齿轮运动副…
➢ 定义伺服电动机 电动机名称、选择从动图元、 方向、定义运动函数…
➢ 机构分析的类型 ➢ 定义机构分析 ➢ 运动回放与干涉检查
D 教学反思
教学反思
零部件组装
02
01
03
连接类型、运动副、 伺服电动机
proe机构仿真之运动分析
机构仿真之运动分析关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线版权:原创文章,转载请注明出处机构仿真是PROE的功能模块之一。
PROE能做的仿真内容还算比较好,不过用好的兄弟不多。
当然真正专做仿真分析的兄弟,估计都用Ansys去了。
但是,Ansys研究起来可比PROE麻烦多了。
所以,学会PROE的仿真,在很多时候还是有用的。
坛子里关于仿真的教程也有过一些,但很多都是动画,或实例。
偶再发放一份学习笔记,并整理一下,当个基础教程吧。
希望能对学习仿真的兄弟有所帮助。
术语创建机构前,应熟悉下列术语在PROE中的定义:主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
接头(Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
[计算机软件及应用]proe运动仿真教程
![[计算机软件及应用]proe运动仿真教程](https://img.taocdn.com/s3/m/3e9228f280c758f5f61fb7360b4c2e3f5727250e.png)
ProE运动仿真教程第一步:设置工作目录(由于该教程的实例是ProE自带的数模,在此目录中)文件---设置工作目录---C:\Program Files\proeWildfire 5.0\demos\demo\mdx\单击选择tutorial1文件夹确定即可。
第二步:打开工作目录点击左侧目录树---选择工作目录---右侧文件内容中双击装备图slider_crank.asm第三步:优化显示方便观察对左侧目录树第一个零件体(Block.PRT)右键---隐藏点击工具栏第一个按钮不显示基准平面第四步:进入机构程序菜单栏---应用程序---机构第五步:设置伺服电机点击右侧工具图标进入伺服电机设置界面类型---运动轴选择曲轴中心轴轮廓---规范选择速度模输入36即角速度为36deg/se第六步:分析定义点击分析定义图标进入分析定义界面类型选择---运动学(由于之后我们需要查看位移、速度、加速度曲线因此需要定义类型为运动学分析类型)开始时间、终止时间、帧数、等按照自己需要定义点击运行即可看到曲轴连杆机构开始运行点击确定即可。
第七步:回放功能点击进入回放界面继续点击该界面上按钮进入动画界面按照情况自己操作即可点击捕获可以输出动画文件到之前定义的工作目录。
第八步:输出运动学曲线点击右侧工具图标中图标,进入测量结果界面点击进入新建测量定义界面类型选择位置然后在活塞顶选择一个定义点即可。
按照以上操作继续定义另外两个点(速度和加速度)回到测量定义界面点击结果集中第五步定义的分析定义名称测量中的三个定义点值就会出现结果。
单击第一个值,再单击该界面左上角就出现该定义点的位置-时间曲线图。
多选(ctrl或者shift方法)三个或者两个值,再单击该界面左上角就出现多个定义点同时出现在一张曲线图。
(如点击分别绘制测量图形则同时生成3张图形)此时可点击进入回放界面,测试测量图形上会有此时运动时刻在何位置的红线示意。
第九步:检测轨迹曲线菜单栏---插入---轨迹曲线在数模上选择需要测绘轨迹的点然后左键点击对应的结果集选择预览即可在图形中看到一个选中点的运动轨迹曲线点击确定,在数模上生成曲线。
基于proe的机构运动仿真
⑧ 轴承 具有3个旋转自由度和 一个平移自由度相当于球连 接的基础上再加一个平移自 由度,使用“点与轴线对齐” 来限制其他两个自由度
二、建立运动模型
讲义. 运动连接(续
连接类型
自由度
平移
旋转
约束
刚性(Rigid) 0
0
完全
销钉(Pin)
0
1
轴对齐;平面或点对齐
滑动杆(Slider) 1
0
轴对齐;平面或点对齐
初始条件包括初始位置和初始速度两个
方面点击按钮
初始位置的确定需要借
助快照功能从事先创建好的快照得到主体的
位置。由于速度为矢量,所以在指出模的同
时还要指出其方向,
进行动态分析 时用到
点速度 连接轴速度
角速度 相对于槽的切线速度
评估 删除
五、运动分析
完成运动模型及运动环境的设置后需 要对机构进行分析点击按钮
三、运动副
齿轮类型分为一般、正、锥、涡轮、 齿条与小齿轮
对于所有类型需对每一个齿轮选取 连接轴,传动比一般都采用齿数比的方 式予以确定。
对于齿条类,齿条的定义通常需要 指出滑动杆连接轴,传动比定义一般使 用 mm/rev,即齿轮旋转一周,齿条前进 的距离。
2. 齿轮(续
实例演练
三、运动副
四、运动环境
选取运动轴曲柄连杆机构 选择曲轴的销钉连接图标 反向按钮改变旋向
类型分为两种一种是连接轴伺服电机,用于定义某一旋转轴的旋转 运动,可用于运动分析,另一种是几何伺服电机,用于创建复杂的 运动如螺旋运动,不能用于运动分析
4. 伺服电机续)
定义轮廓规范为位置时 模选项定义为斜坡曲轴旋转一圈 360度,图形中可以查看定义的 轮廓,横坐标为时间