第8讲 CPM1A系列PLC的指令系统—数据运算指令
PLC功能指令—数学运算指令

(4)整数数据做除以2运算,相当于其二进制形式右移1位;做除以4运算,相当 于其二进制形式右移2位;做除以8运算,相当于其二进制形式右移3位;……。
图5-15 整数除法运算双整数输出
2.除法指令DIV的举例
处于监控状态的除法指令梯形图如图5-16(a)所示。如果I0.0触点接通,执行除 法指令。除法运算的结果(15/2=商7余1)存储在VD20的目标操作数中,其中商7存储 在VW22,余数1存储在VW20。其二进制格式为0000 0000 0000 0001 0000 0000 0000 0111。
5.2.4 除法指令DIV
1.除法指令DIV的说明
(1)整数除法运算DIV_I。将2个单字长(16位)有符号整数IN1和IN2相除,运算 结果送到OUT指定的存储器单元,输出结果为16位。
(2)双整数除法运算DIV_DI。将2个双字长(32位)有符号双整数IN1和IN2相除 ,运算结果送到OUT指定的存储器单元,输出结果为32位。
2.加法指令ADD的举例
图5-10 加法指令举例 图5-11 加法运算状态监控表
5.2.2 减法指令SUB
1.减法指令SUB的说明
(1)整数减法运算SUB_I。将2个单字长(16位)有符号整数IN1和IN2相减, 运算结果送到OUT指定的存储器单元,输出结果为16位。
(2)双整数减法运算SUB_DI。将2个双字长(32位)有符号双整数IN1和IN2 相减,运算结果送到OUT指定的存储器单元,输出结果为32位。
【例题5.2】 要求I0.0在接通120~150s内Q0.0状态为ON,延时时间用模拟 电位器1进行调节,编写相应的PLC程序。
欧姆龙CPM1A系列PLC

输入输出故障
检查输入输出模块是否正常, 接线是否正确,以及输入输出 信号是否正常。
程序故障
检查程序是否有错误,是否有 死循环或异常中断,以及程序
运行是否稳定。
故障排除
重启plc
尝试重启plc,看是否能恢复正常。
检查硬件
检查plc的硬件是否有异常,如接线松动、模块损坏等。
更新固件
如果plc的固件版本过旧,可能会导致一些未知的故障,可以尝试更新plc的固件。
和发送信号。
输入模块用于接收外部设备的 信号,并将它们转换为PLC可以
处理的数字信号。
输出模块将PLC的数字信号转换 为外部设备可以理解的信号。
输入输出模块有多种类型,如 模拟量输入输出、数字量输入 输出等,以满足不同应用的需 求。
通讯模块
01
通讯模块用于实现PLC与外部设 备之间的数据传输和通讯。
层控制逻辑。
编程工具
CJ1W-SC01
欧姆龙cpm1a系列plc的编程软件,支持多 种编程语言和功能,提供图形化界面和调试 工具。
CJ1W-SC02
用于cpm1a系列plc的监控软件,可以实时监控plc 的运行状态和数据。
CJ1W-SC03
用于cpm1a系列plc的故障诊断软件,可以 快速定位和解决plc故障。
Function Block Diagram (FBD):功能块图编程语言, 使用图形化块来表示功能,
易于理解和维护。
Structured Text (ST):结构 化文本编程语言,使用类似 于高级编程语言的语法进行 编程,具有强大的计算和数
据处理能力。
Instruction List (IL):指令表 编程语言,以指令的形式逐 条编写程序,适合于编写底
CPM1A指令系统
CY
12
ASL(25) Ch
Ch是移位通道号 是移位通道号
4. 数字左 右移指令SLD (25)/ ASR(26) 数字左/右移指令 右移指令 数字左/右移位指令的功能和使用方法相似 数字左 右移位指令的功能和使用方法相似
以数字左移指令为例,介绍它们的功能和使用方法 以数字左移指令为例 介绍它们的功能和使用方法
数据移位和数据转换指令 数据运算指令 子程序控制 指 令 高速计数器控制 指 令
1
2
数据移位与数据转换指令指令 数据移位指令 数据转换指令
3
移位寄存器指令 可逆移位寄存器指令 数字左、 数字左、右移指令 算术左、 算术左、右移指令 循环左、 循环左、右移指令 字移位指令 异步移位寄存器指令
数据移位指令
译码方法
确定被译码的起始数字位及译码的位数; ① 由C确定被译码的起始数字位及译码的位数; 确定被译码的起始数字位及译码的位数 将该位数字(十六进制 转换为0~ 的十进制数 十六进制)转换为 的十进制数; ② 将该位数字 十六进制 转换为 ~15的十进制数; 再将结果通道中与该十进制数对应的位置为ON, ③ 再将结果通道中与该十进制数对应的位置为 , 其余位为OFF。 其余位为 。 被译码的数字位不能大于4。 ④被译码的数字位不能大于 。
R
01000
第一个移位脉冲输入后, 状态移入20000。 第一个移位脉冲输入后,00000的ON状态移入 的 状态移入 。 经过4个移位脉冲 经过 个移位脉冲20003 ON,于是 个移位脉冲 ,于是01000 ON。 。 第五个移位脉冲时20003 OFF,于是 第五个移位脉冲时 ,于是01000 也OFF。 。 移位过程中,只要 移位过程中,只要00001为ON,移位寄存器即复位。 为 ,移位寄存器即复位。
欧姆龙CPM1A系列PLC功能指令

欧姆龙CPM1A系列PLC功能指令欧姆龙CPM1A系列PLC基本指令CPM1A系列PLC的基本逻辑指令与FX系列PLC较为相似,梯形图表达方式也大致相同,这里列表表示CPM1A系列PLC的基本逻辑指令(见表4-8)欧姆龙CPM1A系列PLC功能指令功能指令又称专用指令,CPM1A系列PLC提供的功能指令主要用来实现程序控制,数据处理和算术运算等。
这类指令在简易编程器上一般没有对应的指令键,只是为每个指令规定了一个功能代码,用两位数字表示。
在输入这类指令时先按下“FUN”键,再按下相应的代码。
下面将介绍部分常用的功能指令。
1.空操作指令NOP(0 0)本指令不作任何的逻辑操作,故称空操作,也不使用继电器,无须操作数。
该指令应用在程序中留出一个地址,以便调试程序时插入指令,还可用于微调扫描时间。
2.结束指令END(01)本指令单独使用,无须操作数,是程序的最后一条指令,表示程序到此结束。
PLC在执行用户程序时,当执行到END指令时就停止执行程序阶段,转入执行输出刷新阶段。
如果程序中遗漏END指令,编程器执行时则会显示出错信号:“NO END INSET”:当加上END指令后,PLC才能正常运行。
本指令也可用来分段调试程序。
3.互锁指令IL(02)和互锁清除指令ILC(0 3)这两条指令不带操作数,IL指令为互锁条件,形成分支电路,即新母线以便与LD指令连用,表示互锁程序段的开始;ILC指令表示互锁程序段结束。
互锁指令IL和互锁清除指令ILC用来在梯形图的分支处形成新的母线,使某一部分梯形图受到某些条件的控制。
IL和ILC指令应当成对配合使用,否则出错。
IL/ILC指令的功能是:如果控制IL的条件成立(即ON),则执行互锁指令。
若控制IL的条件不成立(即OFF),则IL与ILC之间的互锁程序段不执行,即位于IL/ILC之间的所有继电器均为OFF,此时所有定时器将复位,但所有的计数器,移位寄存器及保持继电器均保持当前值。
欧姆龙CPM1A系列PLC基本指令
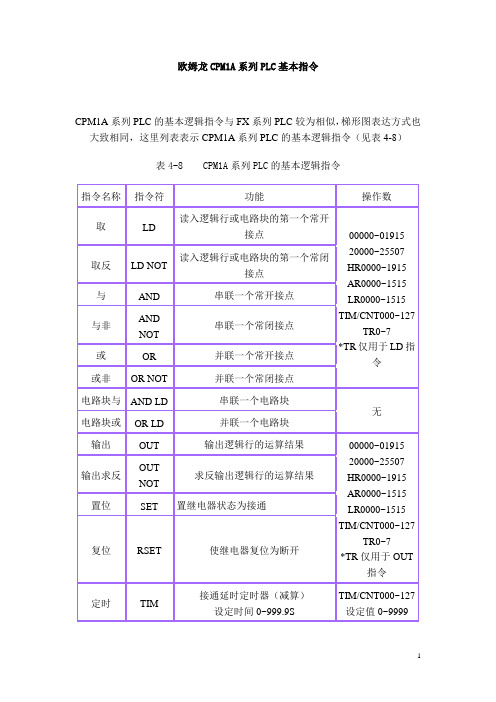
CPM1A系列PLC的基本逻辑指令与FX系列PLC较为相似,梯形图表达方式也大致相同,这里列表表示CPM1A系列PLC的基本逻辑指令(见表4-8)
表4-8 CPM1A系列PLC的基本逻辑指令
指令名称
指令符第一个常开接点
00000~01915
置位
SET
置继电器状态为接通
复位
RSET
使继电器复位为断开
定时
TIM
接通延时定时器(减算)
设定时间0~999.9S
TIM/CNT000~127
设定值0~9999
定时单位为0.1S
计数单位为1次
计数
CNT
减法计数器
设定值0~9999次
电路块与
AND LD
串联一个电路块
无
电路块或
OR LD
并联一个电路块
输出
OUT
输出逻辑行的运算结果
00000~01915
20000~25507
HR0000~1915
AR0000~1515
LR0000~1515
TIM/CNT000~127
TR0~7
*TR仅用于OUT指令
输出求反
OUT NOT
求反输出逻辑行的运算结果
20000~25507
HR0000~1915
AR0000~1515
LR0000~1515
TIM/CNT000~127
TR0~7
*TR仅用于LD指令
取反
LD NOT
读入逻辑行或电路块的第一个常闭接点
与
AND
串联一个常开接点
与非
AND NOT
串联一个常闭接点
或
欧姆龙plc指令

欧姆龙CPM1A系列PLC基本指令cpm1a系列PLC的基本逻辑指令与FX系列PLC相似,梯形图的表达方式也大致相同。
在此,列表显示了cpm1a系列PLC的基本逻辑指令(请参见表4-8)。
表4-8给出了cpm1a系列PLC的基本逻辑指令名称,指令符号功能操作号将LD读入逻辑线或电路块的第一个常开触点00000〜0191520000〜25507hr0000〜1915ar0000〜1515lr0000〜1515tim / cnt000〜127tr0〜7 * TR仅用于LD指令反向ld不读取逻辑线或电路块的第一个常闭触点常开触点与和串联常闭触点与非和非串联或与常开触点并联是否与常闭触点不平行电路块与LD串联连接,一个电路块不带LDLD或并联电路输出输出逻辑线的运算结果00000〜0191520000〜25507hr0000〜1915ar0000〜1515lr0000〜1515tim / cnt000〜127tr0〜7 * TR仅用于out指令输出取反不会反转输出逻辑线的运算结果将继电器状态设置为开重置RSET以将继电器重置为关闭Timing Tim打开延迟计时器(减法)的设置时间0〜999.9s Tim/ cnt000〜127的设置值0〜9999的计时单位为0.1s,计数单位为1次计数CNT减法计数器设置值0〜9999次欧姆龙CPM1A系列PLC功能指令功能指令也称为特殊指令。
cpm1a系列PLC提供的功能指令主要用于实现程序控制,数据处理和算术运算。
这种指令在简单的编程器上没有相应的命令键。
它仅为每条指令提供一个功能码,用两位数字表示。
输入此类指令时,请先按“ Fun”键,然后按相应的代码。
下面将介绍一些常用的功能指令。
1.无操作指令NOP(0 0 0)该指令不执行任何逻辑运算,因此称为空操作,它不使用继电器,也不需要操作号。
指令应用程序在调试程序时会在程序中保留一个地址,也可以用来微调扫描时间。
2. End指令end(01)该指令单独使用,不需要操作数。
第8章 欧姆龙CPM1A系列PLC脉冲输出控制指令
程序功能
当00100 OFF→ON时,执行@PULS指令设置输出脉冲 的个数,执行@SPED指令启动脉冲输出,从01001输 出500Hz的脉冲信号。
脉冲输出功能的应用
使用脉冲输出指令举例(2)
对独立模式, 当输出脉冲 达到设定个 数时,能自 动停止脉冲 输出。
00100 @PULS(65) 000 000 DM0000 @SPED(64) 010 000 # 0050
独立输出模式
固定设置 存放设置脉冲 个数的首通道 从01001输出脉冲 独立模式 脉冲频率500Hz
输出脉冲控制指令
1. 设置脉冲指令
PULS(65) @PULS(65) 000 000 000 000 N N
PULS(65) 000 000 N @PULS(65) 000 000 N
N:存放输出脉冲个数的首通道( N低4位、N+1高4位) 功能:在执行条件为ON时,设定独立模式脉冲输出的 脉冲个数。
第8章 CPM1A系列PLC 脉冲输出控制指令
湖北祥辉电气自动化培训中心
概
述
CPM1A系列PLC的输出点01000和01001可输出 20Hz~2KHz的脉冲信号。
输出的脉冲可设置成两类:独立模式和连续模式。 输出脉冲的模式和频率要用控制指令来设定。 ◎ 同一时刻只能从一个点输出脉冲。 ◎ 正在输出脉冲时,不能用指令改变输出脉冲个数。
使用脉冲输出指令举例(1)
当SPED指令 的F设为 0000,也可 以停止脉冲 输出。
00000 @SPED(64) 000 001 # 0150 @INI(61) 000 003 000
连续输出模式
从01000输出 连续模式 1500Hz 固定设置 停止脉冲输出
第6章 CPMA1系列PLC及基本指令

输入12点 扩展器 输出8点
输入12点 扩展器 输出8点
输入12点 扩展器 输出8点
30点的主机 连接三个20点的扩展器 扩展到90个I/O点
三、 CPM1A系列PLC的编程工具
CPM1A
编程软件
适配器
专用编 程器
四、 CPM1A系列的特殊功能单元
I/O 单元
模 拟 量 I/O 单 元 温度传感器单元
使用快闪内存储器,可以免去更换锂 电池的麻烦。
内部继电器区(IR) 特殊辅助继电器区(SR)
暂存继电器区(TR) 保持继电器区(HR) 辅助记忆继电器区(AR) 链接继电器区(LR) 定时器/计数器区(TC) 数据存储区(DM)
★ CPM1A内部器件的编号
内部器件以通道形式的编号 通道编号为2、3、4位数不等 每个通道内有16个继电器(00~15)
高速计数器具有中断功能。 PLC利用高速计数器,可以实现中断控制。
5. 外部输入中断功能
外部输入中断功能是解决快速响应问题的措施之一。 不同的型号,外部输入中断的输入点是不同的。 响应中断时,停止执行主程序而转到中断处理子程序。 执行完中断处理子程序,再返回断点继续执行主程序。 使用输入中断功能时,必须在系统设定区中进行设定。
③ 系统设定区:DM6600~DM6655
系统设定区的设定内容可用编程工具写入。 系统设定区的设定内容见表2.5。
若系统设定区的设定出错,则辅助记忆继电器的 对应位为ON。 系统设定区的设定内容,可在指定时间读取。 系统设定区的设定错误,只能用初始化来处理。
概述 基本指令 常用的应用指令 数据传送和数据比较 数据移位和数据转换 数据运算
3. 暂存继电器区(TR)
该区继电器(TR0~TR7)编号要冠以TR。
CPM1A指令系统

00000
00001
01000
00004 00002 00003
5、程序结束时一定要安排END指令,否则程序不被执行。
二、基本编程方法 1、两个或两个以上的线圈或指令可以并联输出。 2、触点组与单个触点并联时,应将单个触点放在下面。
00000
01000
00001
00002
01000
00001
00002
逻辑块1
逻辑块2
逻辑块3
AND LD指令的使用
00000 00001 00003 00005 20000
00002
00004
00006
方法一
LD AND ORNOT LD OR ANDLD LD ORNOT ANDLD OUT 00000 00001 00002 00003 00004 00005 00006 20000
置位输入 S 复位输入 R N
N:继电器号
IR、SR、HR、AR、LR
功 能: 根据两个执行条件,KEEP用来保持指定继电器N的ON状态或OFF状态。 ————锁存继电器指令 N为HR时具有断电保持功能。
KEEP(11)指令的应用
00002 20000 00003 20000
00002
KEEP
00003
连续使用IL指令
连续输出
输出方式小结
00000 SET 01000 00001
01001
00002 01002
并联输出
00000 01000
复合输出
01001
00000
IL(02)
00001 01002
01000
01001
SET 01002
00003 00004
CPM1A系列PLC的指令系统

2.基本编程方法
(1) 两个或两个以上的线圈或指令可以并联输出。
00000
01000 01001
SET 01002
LD OUT OUT SET
00000 01000 01001 01002
(2) 触点组与单个触点并联,单个触点应放在下面。
00000 00001 20000 01100 00001 20000 00000 01100
LD LD AND NOT OR LD OUT
00000 00001 20000 01100
LD AND NOT OR OUT
00001 20000 00000 01100
不必用 OR LD
(2) 触点组与单个触点并联,单个触点应放在下面。
00000
01100 00001 20000 LD LD AND NOT OR LD OUT 00000 00001 20000 01100 00000
符号
S KEEP N R
继电 器位
格式:KEEP(11)N
当S端ON时,N为ON且保持。 当R端ON时, N复位。
当S与R端同时为ON时, N复位优先。
★ 当 N为保持继电器HR时,有保持功能。
KEEP 指令的工作时序
置位条件
00002 00003 KEEP 20000 00002 00003
注意! LD 00002 LD 00003 KEEP (11) 20000
00000 20000
00000
DIFU(13) 20000
Ts
00001
01000
20000
KEEP 01000
00001 LD DIFU(13) LD LD KEEP (11) 00000 20000 20000 00001 01000
CPM1A系列PLC简介
40点IO 24入,16出
返回
上页 目 录 下页
9
浙江大学信息学院控制系
3.CPM1A的继电器区及数据区
—控制仪表和计算机控制装置—
CPM1A的继电器区及数据区由以下几部分组成:
内部继电器区 IR 特殊辅助继电器区 SR 暂存继电器区 TR 保持继电器区 HR 辅助记忆继电器区 AR 链接继电器区 LR 定时器/计数器区 TIM/CNT 数据存储区 DM
(2)输入点00000~00002作为高速计数输入时,输入电路的响应很快。计数器输入端00000(A相)、00001(B相) 的响应时间足够快,满足高速计数频率(单相5kHz、两相2.5kHz)的要求;复位输入端00002(Z相)的响应时 间为ON:100μs、OFF:500μs。
(3)输入点00003~00006作为中断输入时,从输入ON到执行中断子程序的响应时间为0.3ms。
上页 目 录 下页
4
浙江大学信息学院控制系
—控制仪表和计算机控制装置—
I/O规格--输出规格--继电器输出
项目 最大开关能力 最小开关能力
继电器寿命 ON响应时间 OFF响应时间
规格
AC:250V/2A DC:24V/2A 公共端COM:4A
DC:5V、10mA
阻性负载:30万次 感性负载:10万次
17
浙江大学信息学院控制系
—控制仪表和计算机控制装置—
定时器/计数器区(TIM/CNT)
CPM1A的定时器和计数器统一编号,编号又称 TC号。 CPM1A共有128个定时器和计数器,其TC号为TC000~TC127。
—控制仪表和计算机控制装置—
暂存继电器区(TR)
CPM1A PLC由8个暂存继电器,记为TR0~TR7 用于暂时存储复杂梯形图中的分支点的ON/OFF状态 暂存继电器在同一程序段内不能重复使用 在不同程序段内可重复使用
CPM1A欧姆龙_PLC指令系统及编程
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
1 LD和LD NOT 指令
格式:
LD
N
LD NOT
N
其中的操作数N为位,即LD和LD NOT指令只能以位为单位进 行操作。这里的N可以是IR、SR、AR、HR、LR、TR或TC。
3 AND和AND NOT指令
格式:
AND
N
AND NOT N
其中的操作数N也是位,它可以是IR、SR、AR、LR、HR或TC。
功能:逻辑与运算指令。
AND表示N与前面的逻辑结果进行与运算。即N的常开触点与前 面的逻辑串联。AND NOT表示N取非并与前面的逻辑结果进行 与运算。即N的常闭触点与前面的逻辑串联。
00003
AND NOT 00004
OR LD
LD NOT 00005
AND NOT 00006
OR LD
OUT
01001
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
④ 图(b)逻辑后置法实现ND
00002
LD
00003
AND NOT 00004
LD NOT 00005
(b)
01001
电气控制与PLC 第六章 欧姆龙PLC指令系统及编程
① 图(a)逻辑分置法实现程序段:
LD
00000
OR
00003
LD
00001
OR
00004
AND LD
LD NOT 00002
OR NOT 00005
CPM1A欧姆龙_PLC指令系统及编程
(a)
(b)
电气控制与PLC
第六章
欧姆龙PLC指令系统及编程
① 图(a)逻辑分置法实现程序段: LD OR LD OR 00000 00003 00001 00004
AND LD
LD NOT OR NOT AND LD OUT 01001 00002 00005
电气控制与PLC
第六章
欧姆龙PLC指令系统及编程
LD AND NOT OR LD LD NOT
00002
00003 00004
00005
AND NOT
OR LD OUT
00006
01001
电气控制与PLC
第六章
欧姆龙PLC指令系统及编程
④ 图(b)逻辑后置法实现程序段: LD AND LD AND NOT LD NOT AND NOT 00000 00002 00003 00004 的常开触点与左端母线相连。 LD NOT 表示 N 的常闭 触点与左端母线相连。
说明:LD和LD NOT指令的执行不会影响标志位。
电气控制与PLC 2 OUT和OUT NOT指令
第六章
欧姆龙PLC指令系统及编程
格式: OUT OUT NOT N N
其中的操作数 N 也是位,它可以是 IR 、 SR 、 AR 、 LR 、 TR 或 HR 。 功能:输出指令。用来表示一个运算结果。 OUT 指令将运算结果输出到 N 。 OUT NOT 指令将运算结果取反 后输出到N。 说明:OUT 和OUT NOT指令也只能以位为单位进行操作。 它们的执行不会影响标志位。在程序中不同的线圈可以同条 件并联输出。
当有几个并联支路相串联时,可按先并后 串的原则将触点多的支路放在梯形图的最 左端。
CPM1A系列PLC基本指令

数据
00000 10000 00001 10001
⒉ 逻辑与操作指令AND和AND NOT
逻辑与就是触点的串联连接指令 串联一个常开触点用AND指令 串联一个常闭触点用AND NOT指令
AND和AND NOT指令的用法
00001 00003 00002 00004
10000 10001
地址
DIFD的功能是:当逻辑条件从通到断时,指 定继电器仅接通一个扫描周期,然后复位。
00002
00002 01600 01601
微分指令的工作波形图
DIFU 01600 DIFD 01601
接通
断开
LD DIFU DIFD
接通
00002 01600 01601
4. 定时器指令
C系列PLC有两种定时器 普通定时器TIM,时基是0.1s 高速定时器TIMH,时基是0.01s
00002
锁
00003
存
指
断开 接通
令
的
00002
工
作
00003
波
形
10000
图
锁存指令KEEP工作演示
KEEP
S
10000
R
断开
接通 接通
常用基本指令应用举例
PLC
00000
程序工作演示
00001
00002
00003
00004
00005
S Keep 00600 R
S Keep 00700 R
地址
OR LD指令用来处理两个触点组的并联 当两个触点组(程序块)并联时,每个
触点组都以起始指令(LD或LD NOT)开始 单独编程 然后用OR LD指令将两个触点组并联
欧姆龙PLC学习资料(CPM1A篇)

PLC 初级培训教材第一章 电气系统及PLC 简介一、设备电气系统结构简介 设备电气系统一般由以下几部分组成1、 执行机构:执行工作命令陶瓷行业中常见的执行机构有:电动机(普通、带刹车、带离合)、电磁阀(控制油路或气路的通闭完成机械动作)、伺服马达(控制调节油路、气路的开度大小)等。
2、 输入元件:从外部取入信息陶瓷行业中常见的输入元件有:各类主令电器(开头、按扭)、行程开关(位置)、近接开关(反映铁件运动位置)、光电开关(运动物体的位置)、编码器(反映物体运动距离)、热电偶(温度)、粉位感应器粉料位置)等。
控制中心:记忆程序或信息、执行逻辑运算及判断常见控制中心部件有各类PLC 、继电器、接触器、热继电器、等。
电源向输入元件、控制中心提供控制电源;向执行机构提供电气动力。
二、简单的单台电动机电气系统例:一台星——角启动的鼠笼式电动机的电气系统 1、一次线路图 2、二次线路图R JC1 SJ JC13、上图看出,二次回路图中为实现延时控制,要使用一个时间继电器,而在陶瓷行业中,星——角启动控制可说是一种非常简单的例子,若在陶瓷生产设备上全部采用继电器类来实现生产过程的自动控制,要使用许多的继电器、时间继电器等其它一些电气产品,而该类产品占空间大,且运行不是十分可靠。
三、PLC简介1、可编程序控制器早期的PLC只能做些开关量的逻辑控制,因而叫PLC,但近年来,PLC采用微处理器作为中央处理单元,不仅有逻辑控制功能,还有算术运算、模拟量处理甚至通信联网功能,正确应称为PC,但为了与个人计算机有所区别,仍称其为PLC。
2、PLC的特点1>、灵活、通用控制功能改变,只要改变软件及少量的线路即可实现。
2>、可靠性高、抗干扰能力强①硬件方面:采用微电子技术开关动作由无触点的半导体电路及大规模集成电路完成,CPU与输入输出之间,采用光电隔离措施,隔离了它们之间电的联系。
②软件方面:有自身的监控程序,对强干扰信号、欠电压等外界环境定期检查,有故障时,存现状态到存储器,并对其封闭以保护信息;监视定时器WTD,检查程序循环状态,超出循环时间时报警;对程序进行校验,程序有错误进输出报警信息并停止执行。
欧姆龙PLC数据运算
可编程序控制器
执 行
ASCII
指 令 的 几 种 情 况
可编程序控制器
任务八 数据运算控制
本节小结
使用编码指令DMPX时要注意: ①S+3不能超过其所在区域。例如,在控制字C=#0023时, 若源首通道设为HR18就会出错。因为要对3个通道进行编 码,而HR区只有HRl8和HRl9这2个通道可以供编码了。 ②要牢记控制字的内容及意义,并注意控制字的内容不能 写错。由于一个结果通道只能存放4个转换结果,所以一 次只能对4个源通道进行编码。若C设置错误,程序将无 法执行。例如,若C设为#0042,即对5个源通道进行编码, 而5个编码结果,一个结果通道是无法存放的。
可编程序控制器可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制end可编程序控制器任务八数据运算控制图是使用add指令修改tim设定值的例子
可编程序控制器
任务八 数据运算控制
END
可编程序控制器
任务八 数据运算控制
1.十进制加法运算指令(ADD/@ADD、ADDL@ADDL) 图是使用ADD和ADDL指令的例子,图 (c)是执行双字加 运算的操作过程。为了保证运算的正确,每次运算前都先用 CLC指令将进位位清零。 图中,当00000为ON时执行@CLC指令清进位位,执行 @ADD指令,将HR00(#1234)与#8341及CY相加,结果存放在 DM0000中;当00001为ON时,执行@CLC指令清进位位, 执行@ADDL指令,将双字HR02(#9876)HR01(#5432)与 LR02(#1234)LR01(#5678)及CY相加,结果存放在DM0002和 DM0001中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
十进制运算指令
11.递减指令DEC(39)/@DEC(39) ◇ 梯形图符号及操作数取值区域
◇ 功能:当执行条件为ON时,每执行一次DEC 将Ch中的数据按十进制减1,不影响进位位CY。
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
1.二进制加法指令ADB(50)/@ADB(50) 二进制加法指令ADB(50)/@ADB(50) ADB
十进制运算指令
5.双字BCD码减法指令SUBL(55)/@SUBL(55) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时, SUBL将Mi+1、Mi中的8位 BCD数减去Su+1、Su中的 8位BCD数,再减去CY,结 果存入R+1、R中。若结果为 负,将置为CY,而R+1、R中 的内容为实际结果的十进制补 码。 SUBL功能如右所示:
逻辑运算指令
4.异或指令XORW(36)/@XORW(36) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
◇ 功能:当执行条件为ON时,将I1、I2中的数据 按位进行逻辑异或运算,结果存入R中。
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
5.同或指令XNRW(37)/@XNRW(37)
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
6.BCD码乘法指令MUL(32)/@MUL(32)
◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时,MUL将Md、Mr中的 内容相乘,结果存入R+1、R中,R+1中存积的高 4位数,R中存积的低4位数。
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
◇ 功能:当执行条件为ON时,MLB将Md、Mr中的 内容进行二进制乘法计算,结果存入R+1、R中, R+1中存积的高4位十六进制数,R中存积的低4 位十编程序控制器
二进制运算指令
4.二进制除法指令DVB(53)/@DVB(53) 二进制除法指令DVB(53)/@DVB(53) DVB ◇ 梯形图符号及操作数取值区域
◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
◇ 功能:当执行条件为ON时,将I1、I2中的数据 进行逻辑同或运算,结果存入R中。
湖北工业大学
◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON 时,ADD将Au、Ad的内容 和CY相加,结果存入R中, 若结果大于9999将把CY 置为ON。 ◇ ADD指令的应用
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
3.BCD码减法指令SUB(31)/@SUB(31) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
7.BCD码除法指令DIV(33)/@DIV(33)
◇ 梯形图符号及操作数取值区域
◇ 功能:当执行条件为ON时,DIV将Dd中的内容除
以Dr中的内容,结果存入R+1、R中,R+1中存余 数,R中存商。
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时, ADDL将Au+1、Au中的8位 BCD数与Ad+1、Ad中的8位 BCD数相加,再与CY相加, 结果存入R+1、R中,若结 果大于99999999,CY将被 置位。ADDL功能如右所示:
湖北工业大学
电气控制及可编程序控制器
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
10.递增指令INC(38)/@INC(38) 10.递增指令INC(38)/@INC(38) INC ◇ 梯形图符号及操作数取值区域
◇ 功能:当执行条件为ON时,每执行一次INC将 Ch中的数据按十进制加1,不影响进位位CY。
湖北工业大学
电气控制及可编程序控制器
◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
◇ 功能:当执行条件为ON时,进行一次二进制减 法运算,SBB将Mi中的内容减去Su中的内容,再 减去CY,结果存入R中。
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
3.二进制乘法指令MLB(52)/@MLB(52) 二进制乘法指令MLB(52)/@MLB(52) MLB ◇ 梯形图符号及操作数取值区域
电气控制及可编程序控制器
CPM1A系列PLC的指令系统 系列PLC 第8讲 CPM1A系列PLC的指令系统
数据运算指令
湖北工业大学电气与电子工程学院
2006年12月
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
1.进位位置1指令—STC(40)/@STC(40) 进位位置1指令— 进位位置0指令— 进位位置0指令—CLC(41)/@CLC(41) • STC、CLC指令的梯形图符号 STC、CLC指令的梯形图符号
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
9.双字BCD码除法指令DIVL(57)/@DIVL(57) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时,DIVL将Dd+1、Dd中 的8位BCD数除以Dr+1、Dr中的8位BCD数,结果 存入R+3~R中。R+3、R+2存余数,R+1、R存商。
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
3.逻辑或指令ORW(35)/@ORW(35) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
◇ 功能:当执行条件为ON时,将I1、I2中的数据 按位进行逻辑或运算,结果存入R中。
湖北工业大学
电气控制及可编程序控制器
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时, SUB将Mi的内容减去Su的内 容和CY,结果存入R中。若 结果为负,将置为CY,而R 中的内容为实际结果的十 进制补码。 ◇ SUB指令的应用 SUB指令的应用
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
4.双字BCD码加法指令ADDL(54)/@ADDL(54) ◇ 梯形图符号及操作数取值区域
8.双字BCD码乘法指令MULL(56)/@MULL(56) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
◇ 功能:当执行条件为ON时,MULL将Md+1、Md中 的8位BCD数与Mr+1、Mr中的8为BCD数相乘,结 果存入R+3~R中。MULL功能如右所示:
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
◇ 功能:当执行条件为ON时,进行一次二进制除 法运算,DVB将Dd中的内容除以Dr中的内容,结 果存入R+1、R中。R+1中存余数、R中存商。
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
1.求反指令COM(29)/@COM(29) ◇ 梯形图符号及操作数取值区域
◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
◇ 功能:当执行条件为ON时,ADB将Au、Ad中的 内容和CY进行二进制加法运算,结果存入R中。 如果运算结果大于FFFF,CY为ON。
湖北工业大学
电气控制及可编程序控制器
二进制运算指令
2.二进制减法指令SBB(51)/@SBB(51) 二进制减法指令SBB(51)/@SBB(51) SBB
功能: 功能:当STC的执行条件为ON时进位标志位25504 被置为1。当CLC的执行条件为ON时,进位 标志位25504被置为0。
湖北工业大学
电气控制及可编程序控制器
十进制运算指令
2.BCD码加法指令ADD(30)/@ADD(30) BCD码加法指令ADD(30)/@ADD(30) 码加法指令ADD
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
◇ 功能:当执行条件ON时,将Ch中的数据按位求 反后存入Ch。
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
2.逻辑与指令ANDW(34)/@ANDW(34) ◇ 梯形图符号及操作数取值区域
湖北工业大学
电气控制及可编程序控制器
逻辑运算指令
◇ 功能:当执行条件为ON时,将I1、I2中的 数据按位进行逻辑与运算,结果存入R中。