PLC的功能指令
PLC功能指令—数据处理指令

2. 数据传送指令应用举例
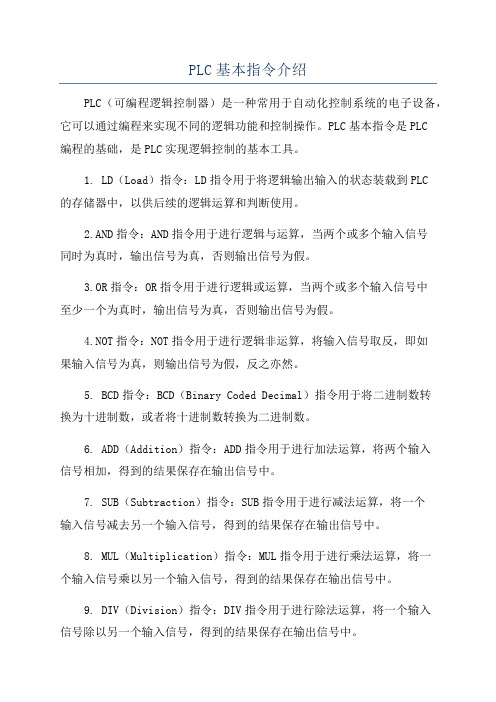
【例题5.1】 设有8盏指示灯,控制要求是:当I0.0接通时,全部灯亮;当I0.1 接通时,奇数灯亮;当I0.2接通时,偶数灯亮;当I0.3接通时,电路图
例题5.1控制关系表
输入继电器
I0.0 I0.1 I0.2 I0.3
Q0.7 ● ●
Q0.6 ●
●
Q0.5 ● ●
输出继电器位
Q0.4 ●
●
Q0.3 ● ●
Q0.2 ●
●
Q0.1 ● ●
Q0.0 ●
●
输出继电器字节
QB0 16#FF 16#AA 16#55
0
例题5.1程序
模块五 功能指令
5.1
数据处理指令
一、转换指令
转换指令是对操作数的类型进行转换,并输出到指 定的目标地址中去。转换指令包括数据的类型转换、数 据的编码和译码指令以及字符串类型转换指令。
1、BCD码与整数之间的转换 2.双字整数转换为实数 3.四舍五入取整指令 4.截位取整指令 5.整数与双整数的转换 6.字节与整数的转换指令
转换指令如图:
二、传送指令
1.数据传送指令MOV
(1)数据传送指令的梯形图使用指令盒形式。指令盒由操作码MOV,数据 类型(B/W/DW),使能输入端EN,使能输出端ENO,源操作数IN和目标操作 数OUT构成。
(2)ENO可作为下一个指令盒EN的输入,即几个指令盒可以串联在一行 ,只有前一个指令盒被正确执行时,后一个指令盒才能执行。
PLC常用指令具体

OUT NOT 输出非指令。用于输出逻辑运算结果的非。即用逻辑运算结果的非去驱动一个指定的线圈(线圈的种类与用NOT指定的线圈相同)。
3,AND 与指令。用于常开接点的串联,完成逻辑与运算。
AND NOT 与反指令。用于常闭接点的串联,完成逻辑与非的运算。
4,OR或指令。用于常开接点的并联。完成逻辑或运算。
OR NOT 或反指令。用于常闭接点的并联,完成逻辑或非运算。
5,AND LD与指令。用于接点组(接点块)的串联。每一接点块都从LD/LD NOT指令开始操作。AND LD指令独立使用,后面没有任何数据。
6,OR LD 或块指令。用于接点组(接点块)的并联。每一接点块都从LD/LD NOT 指令开始操作。OR LD 指令独立使用,后面没有任何数据。
1,LD 取指令:用于常开接点与母线连接,每一个以常开接点开始的逻辑行都使用这一个指令。
LD NOT 取反指令。用于常闭接点与母线连接,每一个以常闭接点开始的逻辑行都使用这一个指令。
2,OUT输出指令。用于输出逻辑运算的结果。即用逻辑运算的结果去驱动一个指定的线圈,该线圈可以是输出继电器,辅助继电器,断电保持继电器的线圈。
12,CNT 计数指令。用于计数器的计数操作。在用语名编程时,CNT为双语句指令,第一条语句为用CNT设定的计数器编号,第二条语句为#设定的计数值。
PLC常用十二条指令1,LD 取指令:用于常开接点与母线连接,每一个以常开接点开始的逻辑行都使用这一个指令。
LD NOT 取反指令。用于常闭接点与母线连接,每一个以常闭接点开始的逻辑行都使用这一个指令。
AND NOT 与反指令。用于常。用于常开接点的并联。完成逻辑或运算。
OR NOT 或反指令。用于常闭接点的并联,完成逻辑或非运算。
plc功能指令
plc功能指令PLC(可编程逻辑控制器)是一种用于自动化控制的电子设备,其功能指令是PLC在控制程序中使用的指令集。
PLC功能指令包括输入、输出、位操作、数学运算、数据处理、定时器和计数器等多种指令。
输入指令用于读取外部传感器或开关的状态,例如XIC(输入联系常闭)指令用于检测输入信号是否为常闭状态,而IIN(输入整数)指令用于读取模拟输入信号的数值。
输出指令用于控制外部执行器或继电器的操作,例如OTE(输出传送激活)指令用于激活输出信号,而TON(定时器开启)指令用于开启定时器。
位操作指令用于对位数据进行操作,例如AND(逻辑与)指令用于判断多个位数据是否同时为1,而XOR(异或)指令用于判断两个位数据是否不同。
数学运算指令用于对数字进行算术运算,例如ADD(加法)指令用于两个数相加,而SUB(减法)指令用于两个数相减。
数据处理指令用于对数据进行处理,例如MOV(移动)指令用于将数据从一个地址复制到另一个地址,而COM(比较)指令用于比较两个数据是否相等。
定时器指令用于设定和监控定时器的操作,例如TON(定时器开启)指令用于开启定时器,而TOF(定时器结束)指令用于检测定时器是否结束。
计数器指令用于设定和监控计数器的操作,例如CTU(计数器增加)指令用于增加计数器的值,而CTD(计数器减少)指令用于减少计数器的值。
除了以上常见的功能指令外,PLC还具有其他指令用于实现复杂的控制功能,例如比较指令、移位指令、程序控制指令等。
总之,PLC功能指令是PLC控制程序中使用的指令集,用于实现自动化控制系统的各种功能和操作。
这些指令的灵活运用可以实现复杂的控制逻辑,提高生产效率和质量。
PLC常用指令(很全的)
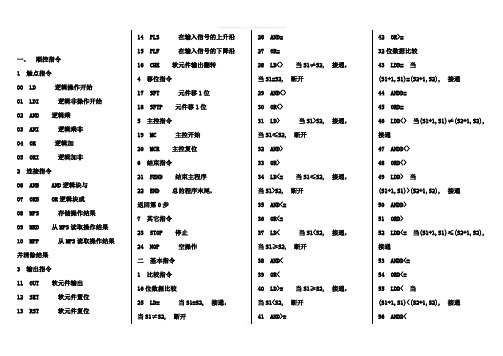
一、顺控指令1 触点指令00 LD 逻辑操作开始01 LDI 逻辑非操作开始02 AND 逻辑乘03 ANI 逻辑乘非04 OR 逻辑加05 ORI 逻辑加非2 连接指令06 ANB AND逻辑块与07 ORB OR逻辑块或08 MPS 存储操作结果09 MRD 从MPS读取操作结果10 MPP 从MPS读取操作结果并清除结果3 输出指令11 OUT 软元件输出12 SET 软元件置位13 RST 软元件复位14 PLS 在输入信号的上升沿15 PLF 在输入信号的下降沿16 CHK 软元件输出翻转4 移位指令17 SFT 元件移1位18 SFTP 元件移1位5 主控指令19 MC 主控开始20 MCR 主控复位6 结束指令21 FEND 结束主程序22 END 总的程序末尾,返回第0步7 其它指令23 STOP 停止24 NOP 空操作二基本指令1 比较指令16位数据比较25 LD= 当S1=S2, 接通,当S1≠S2, 断开26 AND=27 OR=28 LD<> 当S1≠S2, 接通,当S1=S2, 断开29 AND<>30 OR<>31 LD> 当S1>S2, 接通,当S1≤S2, 断开32 AND>33 OR>34 LD<= 当S1≤S2, 接通,当S1>S2, 断开35 AND<=36 OR<=37 LD< 当S1<S2, 接通,当S1≥S2, 断开38 AND<39 OR<40 LD>= 当S1≥S2, 接通,当S1<S2, 断开41 AND>=42 OR>=32位数据比较43 LDD= 当(S1+1,S1)=(S2+1,S2), 接通44 ANDD=45 ORD=46 LDD<> 当(S1+1,S1)≠(S2+1,S2),接通47 ANDD<>48 ORD<>49 LDD> 当(S1+1,S1)>(S2+1,S2), 接通50 ANDD>51 ORD>52 LDD<= 当(S1+1,S1)≤(S2+1,S2),接通53 ANDD<=54 ORD<=55 LDD< 当(S1+1,S1)<(S2+1,S2), 接通56 ANDD<57 ORD<58 LDD>= 当(S1+1,S1)≥(S2+1,S2),接通59 ANDD>=60 ORD>=2 算术运算指令二进制16位加/减61 + (D)+(S)→(D)62 +P63 + (S1)+(S2)→(D)64 +P65 - (D)-(S)→(D)66 -P67 - (S1)-(S2)→(D)68 -P二进制32位加/减69 D+ (D+1,D)+(S+1,S)→(D+1,D)70 D+P71 D+ (S1+1,S1)+(S2+1,S2)→(D+1,D)72 D+P 73 D- (D+1,D)-(S+1,S)→(D+1,D)74 D-P75 D- (S1+1,S1)-(S2+1,S2)→(D+1,D)76 D-P77 * (S1)×(S2)→(D+1,D)78 *P79 / (S1)/(S2)→商(D), 余数(D+1)80 /P81 D* (S1+1,S1)×(S2+1,S2)→(D+3,D+2,D+1,D)82 D*P83 D/ (S1+1,S1)/(S2+1,S2)→商(D+1,D),余数(D+3,D+2)84 D/P85 B+ (D)+(S)→(D)86 B+P87 B+ (S1)+(S2)→(D)88 B+P89 B- (D)-(S)→(D)90 B-P91 B- (S1)-(S2)→(D)92 B-P93 DB+ (D+1,D)+(S+1,S) →(D+1,D)94 DB+P95 DB+ (S1+1,S1)+(S2+1,S2)→(D+1,D)96 DB+P97 DB- (D+1,D)-(S+1,S)→(D+1,D)98 DB-P99 DB- (S1+1,S1)-(S2+1,S2)→(D+1,D)100 DB-P101 B* (S1)×(S2)→(D+1,D)102 B*P103 B/ (S1)/(S2)→商(D),余数(D+1)104 B/P105 DB* (S1+1,S1)×(S2+1,S2)→(D+3,D+2,D+1,D)106 DB*P107 DB/ (S1+1,S1)/(S2+1,S2)→商(D+1,D),余数(D+3,D+2)108 DB/P109 INC (D)+1→(D)110 INCP111 DINC (D+1,D)+1→(D+1,D)112 DINCP113 DEC (D)-1→(D)114 DECP115 DDEC (D+1,D)-1→(D+1,D)116 DDECP3 BCD—二进制转换117 BCD (S)→(D)BCD转换118 BCDP119 DBCD (S+1,S)→(D+1,D)120 DBCDP121 BIN (S)→(D)二进制转换122 BINP123 DBIN (S+1,S)→(D+1,D)124 DBINP4 数据传送指令125 MOV (S)→(D)126 MOVP127 DMOV (S+1,S)→(D+1,D)128 DMOVP129 CML (S)→(D)130 CMLP131 DCML (S+1,S)→(D+1,D)132 DCML133 DCMLP134 BMOV (S)→(D)n个135 BMOVP136 FMOV (S)→(D)n个137 FMOVP138 XCH (D1)←→(D2)139 XCHP140 DXCH (D1+1,D1)←→(D2+1,D2) 141 DXCHP5 程序分支指令142 CJ 条件满足,跳转到P**处143 SCJ 条件满足后紧接的扫描周期,跳转到P**处144 JMP 无条件跳转到P**处145 CALL 执行P**处子程序146 CALLP147 RET 从子程序返回148 EI 允许中断149 DI 禁止中断150 IRET 从中断程序返回151 SUB 执行n指定的程序152 SUBP6 程序切换指令153 CHG 在主副程序间切换7 刷新指令154 COM 执行通讯刷新155 EI 允许通讯刷新156 DI 禁止通讯刷新157 SEG 对应软元件的刷新,仅执行1个扫描周期,M9052 ON时有效三应用指令1 逻辑运算指令158 WAND (D) AND (S)→(D)159 WANDP160 WAND (S1) AND (S2)→(D)161 WANDP162 DAND (D+1,D) AND (S+1,S)→(D+1,D)163 DANDP164 WOR (D) OR (S)→(D)165 WORP166 WOR (S1) OR (S2)→(D)167 WORP168 DOR (D+1,D) OR (S+1,S)→(D+1,D)169 DORP170 WXOR (D) XOR (S)→(D)异或171 WXORP172 WXOR (S1) XOR (S2)→(D)173 WXORP174 DXOR (D+1,D) XOR (S+1,S)→(D+1,D)175 DXORP176 WXNR (D) XOR (S)→(D)177 WXNRP178 WXNR (S1) XOR (S2)→(D)179 WXNRP180 DXNR (D+1,D) XOR (S+1,S)→(D+1,D)181 DXNRP182 NEG 0-(D)→(D)补码183 NEGP2 旋转指令184 ROR n位右转185 RORP186 RCR n位右转(带进位)187 RCRP188 ROL n位左转189 ROLP190 RCL n位左转(带进位)191 RCLP192 DROR n位右转193 DRORP194 DRCR n位右转(带进位) 195 DRCRP196 DROL n位左转197 DROLP198 DRCL n位左转(带进位) 199 DRCLP3 移位指令200 SFR n位右移201 SFRP202 SFL n位左移203 SFLP204 BSFR 1位右移205 BSFRP206 BSFL 1位左移207 BSFLP208 DSFR 1位右移209 DSFRP210 DSFL 1位左移211 DSFLP4 数据处理指令212 SER 数据搜索213 SERP214 SUM 位检查215 SUMP216 DSUM217 DSUMP218 DECO 译码编码219 DECOP220 ENCO221 ENCOP222 SEG 7段编码223 BSET 对字中n位置位224 BSETP225 BRST 对字中n位复位226 BRSTP227 DIS 组合分离228 DISP229 UNI230 UNIP231 ASC ASCII转化5 先进先出指令232 FIFW FIFO写233 FIFWP234 FIFR FIFO读235 FIFRP6 内存缓冲区存取指令236 FROM 从特殊功能模块读取数据237 FROMP238 DFRO239 DFROP240 TO 向特殊功能模块写数据241 TOP242 DTO243 FROM 从远程I/O站读数据244 FROMP245 DFRO246 DFROP247 TO 向远程站写数据248 TOP249 DTO250 DTOP7 FOR/NEXT指令251 FOR 重复n次252 NEXT8 本地站、远程I/O站存取指令253 LRDP 从本地站读数据254 LWTP 向本地站写数据255 RFRP 从远程特殊功能模块读数据256 RTOP 向远程特殊功能模块写数据9 显示指令257 PR 从指定的8点字软元件输出16个字符的ASCII码258 PR 顺序向输出模块输出ASCII码, 直到结束符NUL(00H)259 PRC 将字软元件的注释转换成ASCII码,并输出260 LED 将指定的8点字软元件显示16个字符的ASCII码261 LEDA 显示指定的英文数字字符262 LEDB263 LEDC 显示软元件S的注释264 LEDR 显示复位10 其它指令265 WDT WDT复位266 WDTP267 CHK 故障检测268 SLT 按参数设定的条件,数据被锁定269 SLTR 状态锁存复位,且执行SLT270 STRA 按参数设定的条件,采样数据存入271 STRAR 采样跟踪复位,且允许执行272 STC 进位标志(M9012)ON273 CLC 进位标志(M9012)OFF274 DUTY 用户定义时钟11 伺服指令275 DSFRP 请求启动伺服程序276 PSFLP 数据修改特殊继电器和特殊寄存器一特殊继电器M清单M9000 熔丝断M9002 I/O组件校验出错M9004 MINI网通讯出错M9005 AC电源掉电检测M9006 电池电压低M9007 电池电压低锁存M9008 自诊断出错M9009 信号报警器检测M9010 运算出错标志M9011 运算出错标志锁存M9012 进位标志M9016 数据存储区清零标志M9017 数据存储区清零标志M9018 数据通讯监控切换M9020 0号用户定时时钟M9021 1号用户定时时钟M9022 2号用户定时时钟M9023 3号用户定时时钟M9024 4号用户定时时钟M9025 时钟数据设置请求M9026 时钟数据出错M9027 时钟数据显示M9028 时钟数据读请求M9030 0.1秒时钟M9031 0.2秒时钟M9032 1秒时钟M9033 2秒时钟M9034 1分钟时钟M9036 常开M9037 常闭M9038 RUN后第一个扫描周期ONM9039 运行标志M9040 暂停PAUSE允许线圈M9041 PAUSE状态触点M9042 停止状态触点M9043 采样跟踪完成M9044 采样跟踪M9046 采样跟踪M9047 采样跟踪准备M9048 RUN LED闪烁标志M9049 切换输出字符数目M9050 存放操作结果的存储区交换触点M9051 CHG指令执行禁止M9052 SEG指令切换M9053 EI/DI指令切换M9054 单步运行标志M9055 状态锁存完成标志M9056 主程序P, I设置请求M9057 副程序P, I设置程序M9060 副程序2P, I设置程序M9061 副程序3P, I设置程序M9060 远程终端出错M9061 通讯出错M9065 分离传送状态M9066 传送处理切换M9067 I/O组件出错检测M9068 测试模式M9069 线路故障时的输出M9073 WDT出错标志M9074 PCPU准备完成标志M9075 测试模式标志M9076 外部急停输入标志M9077 手动脉冲发生器轴设置错误标志M9078 测试模式请求出错标志M9079 伺复程序设置出错标志M9081 对远程模块的通讯请求M9082 最终站数不一致M9084 出错检测M9086 运行标志BASIC程序M9087 暂停(PAUSE)标志M9091 操作运行出错细节标志M9091 微机子程序调用出错标志M9092 双电源模块过热M9093 双工电源模块出错M9094 I/O改变标志M9095 双工运行校验出错M9096 A3VCPU A自校出错M9097 A3VCPU B自校出错M9098 A3VCPU C自校出错M9099 A3VTU自校出错M9100 SFC程序登记M9101 SFC程序起/停M9102 SFC启动状态M9103 连续步转移有效/失效M9104 连续转移防止标志M9108 步转移监控定时器起始(对应D9108)M9109 步转移监控定时器起始(对应D9109)M9110 步转移监控定时器起始(对应D9110)M9111 步转移监控定时器起始(对应D9111)M9112 步转移监控定时器起始(对应D9112)M9113 步转移监控定时器起始(对应D9113)M9114 步转移监控定时器起始 (对应D9114)M9180 激活步采样跟踪完成标志M9181 激活步采样跟踪执行标志M9182 激活步采样跟踪有效M9196 在块停止时控制输出M9197~9198 保险丝熔断,I/O校核出错显示切换二特殊寄存器D9000 保险丝断D9001 保险丝断D9002 I/O组件校验出错D9003 SUM指令检测位数D9004 MINI网主通讯组件出错D9005 AC掉电计数D9006 电池不足D9008 自诊断出错D9009 信号报警器检测D9010 出错步D9011 出错步D9014 I/O控制模式D9015 CPU运行状态D9016 ROM/RAM设置D9017 最小扫描时间D9018 当前扫描时间D9019 最大扫描时间D9020 恒定扫描D9021 扫描时间D9022 1秒计数器D9025 时钟数据(年,月)D9026 时钟数据(日,时)D9027 时钟数据(分,秒)D9028 时钟数据(星期)D9021~D9034 远程终端组件参数设置D9035 远程I/O组件的通讯属性D9035 扩展文件寄存器D9036 总的站数D9036~9037 供指定扩展文件寄存器软件地址D9038~9039 LED显示优先级D9044 采样跟踪D9050 SFC程序出错代码D9051 出错块D9052 出错步D9053 转移出错D9054 出错顺控步D9055 状态锁存步序号D9061 通讯出错代码D9072 PC通讯检测D9081 对远程终端模块的已执行的通讯请求数D9082 最后的站号D9090 微机子程序输入数据区首软元件号D9091 指令出错D9094 待更换的I/O组件的首地址D9095 A3VTS系统和A3VCPU的运行状态D9096 A3VCPU A自检出错D9097 A3VCPU B自检出错D9098 A3VCPU C自检出错D9099 A3VTU 自检测出错D9100~D9107 断保险丝的组件D9100 保险丝熔断的组件D9108~D9114 步转移监控定时器设置D9116~D9123 I/O组件校验出错D9124 信号器报警数量检测D9125~D9132 信号报警器地址号D9133~D9140 远程终端卡信息D9141~D9172 通讯重发次数D9173 模式设置D9174 设置重发次数D9175 线缆出错模块出错代码D9180~9193远程终端模块出错代码D9180 轴1和轴2的限位开关输出状态存储区D9181 轴3和轴4的限位开关输出状态存储区D9182 轴5和轴6的限位开关输出状态存储区D9183 轴7和轴8的限位开关输出状态存储区D9184 CPU出错的原因D9185 伺服放大器接线数据D9187 手动脉冲发生器轴设置出错D9188 在TEST模式下启动轴号请求出错D9189 出错程序号D9190 数据设置出错D9191 伺服放大器类型D9196~9199 故障站检测D9200 LRDP处理结果D9201 LWTP处理结果D9204 通讯状态D9205 执行回送的站D9206 执行回送的站D9207 通讯扫描时间(最大值)D9208 通讯扫描时间(最小值)D9209 通讯扫描时间(当前值)D9210 重发次数D9211 环路切换计数D9212 就地站运行状态(1~16)D9213 就地站运行状态(17~32)D9214 就地站运行状态(33~48)D9215 就地站运行状态(49~64)D9216 就地站出错检测(1~16)D9217 就地站出错检测(17~32)D9218 就地站出错检测(33~48)D9219 就地站出错检测(49~64)D9220 就地站参数不匹配或(1~16)远程站I/O分配出错D9221 就地站参数不匹配或(17~32)远程站I/O分配出错D9222 就地站参数不匹配或(33~48)远程站I/O分配出错D9223 就地站参数不匹配或(49~64)远程站I/O分配出错D9224 主站与从站和远程I/O站之间的初始通讯(1~16) D9225 主站与从站和远程I/O站之间的初始通讯(17~32) D9226 主站与从站和远程I/O站之间的初始通讯(33~48) D9227 主站与从站和远程I/O站之间的初始通讯(49~64) D9228 就地站或远程I/O站出错(1~16)D9229 就地站或远程I/O站出错(17~32)D9230 就地站或远程I/O站出错(33~48) D9231 就地站或远程I/O站出错(49~64)D9232 就地站或远程I/O站环路出错D9233 就地站或远程I/O站环路出错D9234 就地站或远程I/O站环路出错D9235 就地站或远程I/O站环路出错D9236 就地站或远程I/O站环路出错D9237 就地站或远程I/O站环路出错D9238 就地站或远程I/O站环路出错D9239 就地站或远程I/O站环路出错D9240 检测到接收出错的次数D9243 本站站号检测D9244 从站的总数D9245 检测到的接收出错次数D9248 就地站运行状态D9249 就地站运行状态D9250 就地站运行状态D9251 就地站运行状态D9252 就地站出错检测D9253 就地站出错检测D9254 就地站出错检测D9255 就地站出错检测各种软元件一览表项目 A1,A1NA1S A2,A2NA2C A2-S1A2N-S1 A3,A3NA3A A2U,A3UA4UI/O软元件点 256 512 1024 2048 8192输入继电器 X 0~FF 0~1FF 0~3FF 0~7FF 0~FFF输出继电器 Y 0~FF 0~1FF 0~3FF 0~7FF 0~FFF辅助继电器内部继电器 (1000点)M0~M999 M0~M999, M2048~8191特殊继电器 (256点)M9000~M9255锁存继电器 (1048点)L1000~L2048通讯用继电器 (2048点)B0~B3FF B0~BFFF定时器 100ms定时器 (200点)T0~T19910ms定时器 (56点)T200~T255 100ms记忆定时器 (0点)计数器 (256点)C0~C255寄存器数据寄存器 (1024点)D0~D1023 D0~D6143特殊寄存器 (256点)D9000~D9255 通讯寄存器 (1024点)W0~W3FF W0~WFFF累加器 (2点)A0,A1变址寄存器 (2点)Z, V Z,Z1~Z6(7点), V,V1~V6(7点)嵌套 (8点)N0~ N7指针 (256点)P0~P255中断指针 (32点)I0~I31 常数十进制 K (16位)-32768~+32767(32位)-2147483648 ~+2147483647十六进制 H (16位)0~FFFF(32位)0~FFFFFFFF分类指令助记符功能说明对应不同型号的PLCFX0S FX0N FX1S FX1NFX2N FX2NC程序流程00 CJ 条件跳转P P P P P01 CALL 子程序调用Î Î P P P02 SRET 子程序返回Î Î P P P03 IRET 中断返回P P P P P04 EI 开中断P P P P P05 DI 关中断P P P P P06 FEND 主程序结束P P P P P07 WDT 监视定时器刷新P P P PP08 FOR 循环的起点与次数P P P PP09 NEXT 循环的终点P P P P P传送与比较10 CMP 比较P P P P P11 ZCP 区间比较P P P P P12 MOV 传送P P P P P13 SMOV 位传送Î Î Î Î P14 CML 取反传送Î Î Î Î P15 BMOV 成批传送Î P P P P16 FMOV 多点传送Î Î Î Î P17 XCH 交换Î Î Î Î P18 BCD 二进制转换成BCD码P PP P P19 BIN BCD码转换成二进制P P PP P算术与逻辑运算20 ADD 二进制加法运算P P P P P21 SUB 二进制减法运算P P P P P22 MUL 二进制乘法运算P P P P P23 DIV 二进制除法运算P P P P P24 INC 二进制加1运算P P P P P25 DEC 二进制减1运算P P P P P26 WAND 字逻辑与P P P P P27 WOR 字逻辑或P P P P P28 WXOR 字逻辑异或P P P P P29 NEG 求二进制补码Î Î Î Î P循环与移位30 ROR 循环右移Î Î Î Î P31 ROL 循环左移Î Î Î Î P32 RCR 带进位右移Î Î Î Î P33 RCL 带进位左移Î Î Î Î P34 SFTR 位右移P P P P P35 SFTL 位左移P P P P P36 WSFR 字右移Î ÎÎ Î P37 WSFL 字左移Î Î Î Î P38 SFWR FIFO(先入先出)写入Î Î P P P39 SFRD FIFO(先入先出)读出Î Î PP P数据处理40 ZRST 区间复位P P P P P41 DECO 解码P P P P P42 ENCO 编码P P P P P43 SUM 统计ON位数Î Î Î Î P44 BON 查询位某状态Î Î Î Î P45 MEAN 求平均值Î Î Î Î P46 ANS 报警器置位Î Î Î Î P47 ANR 报警器复位Î Î Î Î P48 SQR 求平方根Î Î Î Î P49 FLT 整数与浮点数转换Î Î Î Î P高速处理50 REF 输入输出刷新P P P P P51 REFF 输入滤波时间调整Î Î Î Î P52 MTR 矩阵输入Î Î P P P53 HSCS 比较置位(高速计数用)ÎP P P P54 HSCR 比较复位(高速计数用)ÎP P P P55 HSZ 区间比较(高速计数用)Î ÎÎ Î P56 SPD 脉冲密度Î Î P P P57 PLSY 指定频率脉冲输出P P PP P58 PWM 脉宽调制输出P P P P P59 PLSR 带加减速脉冲输出Î Î P PP方便指令60 IST 状态初始化P P P P P61 SER 数据查找Î Î Î Î P62 ABSD 凸轮控制(绝对式)Î Î PP P63 INCD 凸轮控制(增量式)Î Î P PP64 TTMR 示教定时器Î Î Î Î P65 STMR 非凡定时器Î Î Î Î P66 ALT 交替输出P P P P P67 RAMP 斜波信号P P P P P68 ROTC 旋转工作台控制Î Î Î Î P69 SORT 列表数据排序Î Î Î Î P外部设备70 TKY 10键输入Î Î Î Î P71 HKY 16键输入Î Î Î Î P72 DSW BCD数字开关输入Î Î P P P73 SEGD 七段码译码Î Î Î Î P74 SEGL 七段码分时显示Î Î P P P75 ARWS 方向开关Î Î Î Î P76 ASC ASCI码转换Î Î Î Î P77 PR ASCI码打印输出Î Î Î Î P78 FROM BFM读出Î P Î P P79 TO BFM写入Î P Î P P外围设备80 RS 串行数据传送Î P P P P81 PRUN 八进制位传送(#) Î Î P PP82 ASCI 16进制数转换成ASCI码ÎP P P P83 HEX ASCI码转换成16进制数ÎP P P P84 CCD 校验Î P P P P85 VRRD 电位器变量输入Î Î P P P86 VRSC 电位器变量区间Î Î P P P87 - -88 PID PID运算Î Î P P P89 - -浮点数运算110 ECMP 二进制浮点数比较Î Î Î ÎP111 EZCP 二进制浮点数区间比较ÎÎ Î Î P118 EBCD 二进制浮点数→十进制浮点数Î Î Î Î P119 EBIN 十进制浮点数→二进制浮点数Î Î Î Î P120 EADD 二进制浮点数加法Î Î Î ÎP121 EUSB 二进制浮点数减法Î Î Î ÎP122 EMUL 二进制浮点数乘法Î Î Î ÎP123 EDIV 二进制浮点数除法Î Î Î ÎP127 ESQR 二进制浮点数开平方Î ÎÎ Î P129 INT 二进制浮点数→二进制整数Î Î Î Î P130 SIN 二进制浮点数Sin运算Î ÎÎ Î P131 COS 二进制浮点数Cos运算Î ÎÎ Î P132 TAN 二进制浮点数Tan运算ÎÎÎ Î P147 SWAP 高低字节交换Î Î Î Î P定位155 ABS ABS当前值读取Î Î P P Î156 ZRN 原点回归Î Î P P Î157 PLSY 可变速的脉冲输出Î Î P P Î158 DRVI 相对位置控制Î Î P P Î 159 DRVA 绝对位置控制Î Î P P Î时钟运算160 TCMP 时钟数据比较Î Î P P P 161 TZCP 时钟数据区间比较Î Î P P P162 TADD 时钟数据加法Î Î P P P 163 TSUB 时钟数据减法Î Î P P P 166 TRD 时钟数据读出Î Î P P P 167 TWR 时钟数据写入Î Î P P P 169 HOUR 计时仪Î Î P P 外围设备170 GRY 二进制数→格雷码Î Î Î ÎP171 GBIN 格雷码→二进制数Î176 RD3A 模拟量模块(FX0N-3A)读出Î P Î P Î177 WR3A 模拟量模块(FX0N-3A)写入Î P Î P Î触点比较224 LD= (S1)= (S2)时起始触点接通Î Î P P P225 LD> (S1)> (S2)时起始触点接通Î Î P P P226 LD< (S1)< (S2)时起始触点接通Î Î P P P228 LD<> (S1)<> (S2)时起始触点接通Î Î P P P229 LD≦ (S1)≦ (S2)时起始触点接通Î Î P P P230 LD≧ (S1)≧ (S2)时起始触点接通Î Î P P P232 AND= (S1)= (S2)时串联触点接通Î Î P P P233 AND> (S1)> (S2)时串联触点接通Î Î P P P234 AND< (S1)< (S2)时串联触点接通Î Î P P P236 AND<> (S1)<> (S2)时串联触点接通Î Î P P P237 AND≦ (S1)≦ (S2)时串联触点接通Î Î P P P238 AND≧ (S1)≧ (S2)时串联触点接通Î Î P P P240 OR= (S1)= (S2)时并联触点接通Î Î P P P241 OR> (S1)> (S2)时并联触点接通Î Î P P P242 OR< (S1)< (S2)时并联触点接通Î Î P P P244 OR<> (S1)<> (S2)时并联触点接通Î Î P P P245 OR≦ (S1)≦ (S2)时并联触点接通Î Î P P P246 OR≧ (S1)≧ (S2)时并联触点接通Î Î P P P。
PLC的功能指令免费全文阅读
4.2.6 读写实时时钟指令
4.3 数学运算指令
4.3.1 数学运算指令
【例4-15】
*D IN2,OUT IN1*IN2=OUT
MUL IN2,OUT
/I IN2,OUT
/D IN2,OUT减指令
4.3.2 浮点数函数运算指令
为了防止在正常情况下监控定时器动作,可以将 监控定时器复位指令WDR插入到程序中适当的地方, 使监控定时器复位。如果FOR-NEXT循环程序的执行 时间太长,下列操作只有在扫描周期结束时才能执 行: ➢ 通信 ➢ I/O更新 ➢ 强制更新 ➢ SM位更新 ➢ 运行时间诊断 ➢ 在中断程序中的STOP指令
3、诊断LED指令 S7-200检测到致命错误时,SF/DIAG(故障/诊断) LED发出红光。
4.5 局部变量表与子程序
4.5.1 局部变量表 1.局部变量与全局变量 在SIMATIC符号表或IEC的全局变量表中定义的变量 为全局变量。程序中的每个程序组织单元(POU)均有 自己的由64个字节L存储器组成的局部变量表。它们用 来定义有范围限制的变量,局部变量只在它被创建的 POU中有效。与之相反,全局符号在各POU中均有效, 只能在符号表/全局变量表中定义。全局符号与局部变 量名称相同时,在定义局部变量的POU中,该局部变量 的定义优先,该全局定义只能在其他POU中使用。
第4章 S7-200的功能指令
本章要点 程序控制、数据处理、数学运算指令 中断程序和中断指令 高速计数器和高速脉冲输出指令
4.1 功能指令概述
4.1.1 怎样学习功能指令 功能指令的分类 1.较常用的指令 2.与数据的基本操作有关的指令 3.与PLC的高级应用有关的指令 4.用得较少的指令 5.功能指令的学习方法
PLC功能指令—顺序控制指令

输入继电器 I0.1
输入 输入元件 SB1常闭触点
作用 停止
输出继电器 Q0.1
输出 输出元件 继电器KA1
Q0.2
继电器KA2
I0.2
SB2常开触点
启动/ 调速
Q0.3
继电器KA3
控制对象
变频器 低速控制端
变频器 中速控制端
变频器 高速控制端
图5 电动机3速控Байду номын сангаас电路
图6 电动机3速顺控继电器功能图
输入继电器 I0.0 I0.1 I0.2
输入 输入元件 KH常闭触点 SB1常闭触点 SB2常开触点
作用 过载保护
停止按钮 启动按钮
输出继电器 Q0.1 Q0.2
Q0.3
输出 输出元件
KM1 KM2
KM3
作用 电源接触器 Y形接触器
△形接触器
2)电动机Y-△形降压启动控制电路 图1 电动机Y-△形降压启动控制电路
模块五 功能指令
5.4
顺序控制指令
5.4.1 单流程控制
1.顺控继电器指令LSCR、SCRT、SCRE
梯形图
表1 指令表 LSCR S-bit
顺控继电器指令 功能
顺控继电器指令指定的状态开始
操作对象 S(位)
SCRT S-bit
转移到指定的状态
S(位)
SCRE
顺控继电器指令指定的状态结束
无
顺控继电器指令说明如下: (1)顺控继电器是S7-200系列PLC的一个存储区,用“S”表示,共256位,采用 8进制(S0.0~S0.7,…,S31.0~S31.7)。 (2)顺控继电器开始指令LSCR用来表示一个状态的开始,结束指令SCRE用来 表示一个状态的结束。
plc功能指令及应用 -回复
plc功能指令及应用-回复标题:PLC功能指令及其应用一、引言在自动化控制系统中,可编程逻辑控制器(Programmable Logic Controller,简称PLC)是实现控制的核心设备。
PLC的功能指令,作为其最基础也最重要的部分,决定了PLC的性能和功能。
本文将详细介绍PLC的功能指令及其应用。
二、PLC功能指令概述PLC功能指令是指PLC为完成特定功能而设置的指令,包括基本指令、步进指令、功能指令等。
这些指令用于进行逻辑运算、计数、定时、数据处理、运动控制等功能。
三、PLC基本指令1. 输入/输出指令:输入/输出指令是PLC中最基本的指令,主要用于读取外部输入设备的状态或改变外部输出设备的状态。
2. 逻辑运算指令:逻辑运算指令包括与、或、非三种基本逻辑运算,以及异或、同或等复合逻辑运算。
3. 计数器指令:计数器指令用于对输入信号进行计数,可以设定计数范围和计数方向。
4. 定时器指令:定时器指令用于对时间进行测量,可以设定定时时间、定时方式等参数。
四、PLC步进指令步进指令是一种特殊的控制指令,用于实现复杂的顺序控制任务。
通过使用步进指令,可以将一个复杂的控制过程分解为多个简单的步骤,然后按照预定的顺序逐一执行。
五、PLC功能指令1. 数据处理指令:数据处理指令用于对数据进行各种操作,如数据传送、比较、移位、旋转、转换等。
2. 运动控制指令:运动控制指令用于控制电机、伺服等运动设备,实现精确的位置控制和速度控制。
3. 网络通信指令:网络通信指令用于实现PLC之间的通信,以及PLC与其他设备的通信。
六、PLC功能指令的应用1. 在工业生产线上,PLC功能指令被广泛应用于设备控制、物料搬运、工艺流程控制等方面。
2. 在建筑智能化系统中,PLC功能指令被用于空调、照明、电梯、安防等系统的控制。
3. 在交通控制系统中,PLC功能指令被用于交通信号灯的控制、车辆检测、道路监控等。
七、结论总的来说,PLC功能指令是PLC的核心组成部分,它们决定了PLC的性能和功能。
PLC基本指令

PLC基本指令PLC基本指令是指PLC程序中最常用的指令,它们可以操作PLC的输入和输出、数据传输、逻辑运算、算术操作、定时器和计数器等功能,实现各种控制功能。
以下是几种常见的PLC基本指令:1. LD指令LD是Load的缩写,该指令用于将输入点的值(0或1)传输到内存中的寄存器(R)中。
例如,LD X0表示将输入点X0的值传输到R0中。
2. OUT指令OUT是Output的缩写,该指令用于将内存(R)中的寄存器值传输到输出点上。
例如,OUT Y0表示将R0中的值传输到输出点Y0上。
3. AND指令AND是And的缩写,该指令用于逻辑“与”运算。
例如,AND X0,X1表示将X0和X1两个输入点进行“与”运算,得到一个结果,如果两个输入点的值都为1,则结果为1,否则结果为0。
4. OR指令OR是Or的缩写,该指令用于逻辑“或”运算。
例如,OR X0,X1表示将X0和X1两个输入点进行“或”运算,得到一个结果,如果两个输入点的值都为0,则结果为0,否则结果为1。
5. ADD指令ADD是Addition的缩写,该指令用于两个数的加法运算。
例如,ADD R0,#10表示将R0中的值加上10。
6. SUB指令SUB是Subtraction的缩写,该指令用于两个数的减法运算。
例如,SUB R0,#5表示将R0中的值减去5。
7. TIM指令TIM是Timer的缩写,用于创建一个定时器。
例如,TIM T0,10表示创建一个周期为10的定时器T0。
8. CTU指令CTU是Count Up的缩写,用于创建一个计数器。
例如,CTU C0,100表示创建一个计数器C0,计数范围为0-100。
这些PLC基本指令可以结合使用,实现复杂的控制功能。
在掌握这些基本指令的基础上,还可以通过使用子程序、中断和移位指令等扩展指令,实现更加复杂的逻辑运算和计算功能。
因此,对PLC的学习和掌握,PLC基本指令是非常重要的。
PLC指令表汇总

PLC
PLC目前有5种标准的编程语言,它分为两大类编程语言:图形化编程语言和文本化编程语言。
图形化编程语言包括:梯形图(LD-LadderDiagram)、功能块图(FBD -Func ti onBlock Diagram)、顺序功能图(SFC -Sequential Function Chart)。
文本化编程语言包括:指令表(IL-Instruction List)和结构化文本(ST-Strutured Text)。
1. 西门子PLC指令表功能汇总
2. 接触器与继电器的区别
相同点:用触点来控制电路的通断。
区别:
(1)控制场合
接触器:用来控制大电流的电路。
⏹负载主电路;大容量控制电路;一般设灭弧装置
继电器:用于控制电路中。
(小电流控制)
⏹不能直接带负载;不设灭弧装置
(2)输入信号不同
继电器:对各种物理量作出反应;作为保护电器。
接触器:在一定的电压信号下动作
(3)功能不同
接触器:大电流的开关电器。
继电器:用于反映控制信号;进行信号的传递;转换;放大;控制触点数量较多。
PLC基本指令

PLC基本指令PLC(可编程逻辑控制器)是一种专门用于自动化控制系统的计算机设备,它通过执行一系列的指令来实现对工业过程的控制。
PLC基本指令是PLC编程中最基础的部分,掌握了这些指令,就能够进行更加复杂的控制操作。
一、LD指令LD指令是PLC中最基本的输入指令,它用于将一个输入点的状态传递给一个输出点。
LD指令的语法结构为:LD 输入点;例如,LD X0;表示将输入点X0的状态传递给输出点。
二、AND指令AND指令是PLC中的逻辑与指令,它用于判断多个输入点的状态是否同时为真。
AND指令的语法结构为:AND 输入点1,输入点2,...,输入点n;例如,AND X0,X1,X2;表示判断输入点X0、X1和X2的状态是否同时为真。
三、OR指令OR指令是PLC中的逻辑或指令,它用于判断多个输入点的状态是否有一个为真。
OR指令的语法结构为:OR 输入点1,输入点2,...,输入点n;例如,OR X0,X1,X2;表示判断输入点X0、X1和X2的状态是否有一个为真。
四、NOT指令NOT指令是PLC中的逻辑非指令,它用于将一个输入点的状态取反。
NOT指令的语法结构为:NOT 输入点;例如,NOT X0;表示将输入点X0的状态取反。
五、OUT指令OUT指令是PLC中最基本的输出指令,它用于将一个输入点的状态传递给一个输出点。
OUT指令的语法结构为:OUT 输出点;例如,OUT Y0;表示将输入点的状态传递给输出点Y0。
六、SET指令SET指令是PLC中的置位指令,它用于将一个输出点的状态置为真。
SET指令的语法结构为:SET 输出点;例如,SET Y0;表示将输出点Y0的状态置为真。
七、RST指令RST指令是PLC中的复位指令,它用于将一个输出点的状态复位为假。
RST指令的语法结构为:RST 输出点;例如,RST Y0;表示将输出点Y0的状态复位为假。
以上就是PLC基本指令的简单介绍,通过学习和掌握这些指令,我们可以进行更加复杂的PLC编程,实现对工业过程的精确控制。
PLC基本指令

PLC基本指令
PLC指令是指控制系统中用于控制输入设备和输出设备的指令程序。
它们可以是编程软件或者硬件,可以根据用户定义的指令对控制器进行操作。
它们可用于控制普通的机械装置,也可用于控制复杂的系统,如PLC、DCS、SCADA等。
经常用到的基本指令
1. 读取指令:读取指令用于从PLC中读取指定的寄存器,存储器或者输入设备的值,这样就可以读取当前的状态,并可以使用这些数据来决定之后的控制行为。
2. 写入指令:写入指令可以将数据写入PLC中,这样就可以控制PLC内部的寄存器,存储器或者输出设备。
3. 比较指令:比较指令可以比较两个或多个值,如果满足一定的条件,就表示比较成功,可以执行后续的指令。
4. 逻辑指令:逻辑指令可以根据比较指令的结果来控制PLC的输出设备,从而实现一些复杂的逻辑控制。
5. 循环指令:循环指令可以重复执行某个指令,直到满足一定的条件,才停止循环操作。
6. 时间指令:时间指令用于定时执行某些指令,从而实现定时,定期操作。
- 1 -。
PLC功能指令的基本知识

PLC功能指令的基本知识什么是PLCPLC指可编程逻辑控制器(Programmable Logic Controller),是一种电子控制设备,适用于自动化控制领域。
PLC的主要作用是接收信号,判断输入信号状态,根据程序逻辑进行运算,发出输出信号以控制现场设备的工作。
PLC功能指令的分类PLC功能指令主要分为以下几类:常规控制指令常规控制指令是最基本的PLC指令,包括运算指令、比较指令、逻辑指令等。
常见的指令有AND、OR、XOR、NOT等。
数据处理指令数据处理指令主要用于对数据进行处理,包括数据传送指令、移动指令、逻辑指令等。
常见的指令有MOV、SFTL、SFTR等。
计数器指令计数器指令是用于计数器操作的指令。
常见的计数器指令有CTU、CTD、TON等。
定时器指令定时器指令是用于定时器操作的指令。
常见的定时器指令有TON、TOF、TP等。
运动控制指令运动控制指令主要用于运动控制,包括位置控制指令、速度控制指令、加速度控制指令等。
常见的指令有MOVJ、MOVL、SPD、ACC等。
通讯指令通讯指令主要用于PLC之间或PLC与其他设备间的通讯。
常见的通讯指令有读/写I/O指令、读/写存储器指令、发送/接收指令等。
PLC功能指令的特点高可靠性PLC功能指令的运行稳定可靠,可靠性较高。
PLC的指令在运行时,它不会卡死、不会死机,也不会崩溃。
灵活性强PLC功能指令可以根据控制需要进行编程,PLC控制系统的灵活性很强。
PLC功能指令的主要特性是具有可编程性,操作系统的可编程性可以通过系统软件进行调整,以适应控制需求的变化。
具有实时性PLC功能指令可以实现实时控制,指令运行速度快,控制精度高。
其系统执行指令的速率、控制精度、运算速度都非常高。
扩展性好PLC功能指令可以通过接口扩展,以实现更多的控制功能。
扩展设备可以对PLC的存储器空间进行扩展,同时可以通过扩展卡、模块等方式,拓展更多类型的I/O口。
PLC功能指令的应用PLC功能指令广泛应用于自动化控制领域,如工业生产、仓库物流、能源、建筑等。
PLC基本指令介绍
PLC基本指令介绍PLC(可编程逻辑控制器)是一种常用于自动化控制系统的电子设备,它可以通过编程来实现不同的逻辑功能和控制操作。
PLC基本指令是PLC编程的基础,是PLC实现逻辑控制的基本工具。
1. LD(Load)指令:LD指令用于将逻辑输出输入的状态装载到PLC的存储器中,以供后续的逻辑运算和判断使用。
2.AND指令:AND指令用于进行逻辑与运算,当两个或多个输入信号同时为真时,输出信号为真,否则输出信号为假。
3.OR指令:OR指令用于进行逻辑或运算,当两个或多个输入信号中至少一个为真时,输出信号为真,否则输出信号为假。
4.NOT指令:NOT指令用于进行逻辑非运算,将输入信号取反,即如果输入信号为真,则输出信号为假,反之亦然。
5. BCD指令:BCD(Binary Coded Decimal)指令用于将二进制数转换为十进制数,或者将十进制数转换为二进制数。
6. ADD(Addition)指令:ADD指令用于进行加法运算,将两个输入信号相加,得到的结果保存在输出信号中。
7. SUB(Subtraction)指令:SUB指令用于进行减法运算,将一个输入信号减去另一个输入信号,得到的结果保存在输出信号中。
8. MUL(Multiplication)指令:MUL指令用于进行乘法运算,将一个输入信号乘以另一个输入信号,得到的结果保存在输出信号中。
9. DIV(Division)指令:DIV指令用于进行除法运算,将一个输入信号除以另一个输入信号,得到的结果保存在输出信号中。
10. JMP(Jump)指令:JMP指令用于跳转到程序中的指定位置,可以实现循环和分支等运算。
11. LBL(Label)指令:LBL指令用于标记程序中的位置,可以通过LBL指令实现程序的结构化管理。
12. OUT(Output)指令:OUT指令用于将输出信号发送到外部设备,实现对外部设备的控制。
13. ANI(Analog Input)指令:ANI指令用于读取模拟信号的输入值,可以读取温度、压力等模拟量。
plc20个基本指令
plc20个基本指令PLC的基本指令包括以下几种:
1. LD(Load):表示动合触点。
2. LDN(Load Not):表示动断触点。
3. A(And):表示与动合触点串联。
4. AN(And Not):表示与动断触点串联。
5. O(Or):表示或动合触点并联。
6. ON(Or Not):表示或动断触点并联。
7. =(Out):表示线圈输出。
8. OLD(Or Lode):块或。
9. ALD(And Lode):块与。
10. LPS(Logic Push):逻辑入栈。
11. LRD(Logic Read):逻辑读栈。
12. LPP(Logic Pop):逻辑出栈。
13. NOT(not):非。
14. NOP(No Operation):空操作。
15. END:程序结束指令。
16. MPS(Multiple Push):多重入栈。
17. MPD(Multiple Pop):多重出栈。
18. MPP(Multiple Push Pop):多重入出栈。
19. PLS(Pulse):脉冲输出指令。
20. PLF(Pulse Not):非脉冲输出指令。
以上是PLC的基本指令,不同的PLC品牌和型号可能会有一些差异,因此具体使用时需要根据实际情况选择相应的指令。
plc常用的基本指令

plc常用的基本指令PLC常用的基本指令PLC(Programmable Logic Controller)是一种广泛应用于工业自动化领域的控制设备,它通过编程控制来实现对生产过程的监控和控制。
在PLC的程序中,常用的基本指令起着至关重要的作用,下面将介绍几个常用的基本指令及其功能。
一、常用的逻辑指令1. 与指令(AND):用于将两个逻辑量进行与运算,当两个逻辑量都为真时,输出为真。
在PLC程序中,与指令常用于实现多个条件同时满足时的控制逻辑。
2. 或指令(OR):用于将两个逻辑量进行或运算,当两个逻辑量中至少一个为真时,输出为真。
在PLC程序中,或指令常用于实现多个条件中至少一个满足时的控制逻辑。
3. 非指令(NOT):用于对一个逻辑量取反,当输入为真时,输出为假;当输入为假时,输出为真。
在PLC程序中,非指令常用于实现条件的取反操作。
二、常用的定时器指令1. 延时ON指令(TON):用于实现延时功能,当输入信号在规定的时间内保持为真时,输出信号才为真。
TON指令可以用于控制延时启动或延时关闭的设备。
2. 延时OFF指令(TOF):与TON指令相反,用于实现延时关闭功能。
当输入信号在规定的时间内保持为假时,输出信号才为真。
TOF指令常用于延时断电或延时停止设备。
三、常用的计数器指令1. 上升沿计数器指令(CTU):用于对输入信号的上升沿进行计数。
当输入信号从假变为真时,计数器的值加1。
CTU指令可以用于实现对事件发生次数的计数。
2. 下降沿计数器指令(CTD):与CTU指令相反,用于对输入信号的下降沿进行计数。
当输入信号从真变为假时,计数器的值减1。
CTD指令常用于实现对事件的倒计数。
四、常用的移位指令1. 左移位指令(SHL):用于将一个操作数向左移动指定的位数。
左移位指令常用于实现对数据的乘以2的幂次方运算。
2. 右移位指令(SHR):与SHL指令相反,用于将一个操作数向右移动指定的位数。
plc指令的功能和用法
plc指令的功能和用法
PLC(可编程逻辑控制器)指令是PLC程序中最基本的单元,它用于实现各种功能,如控制输出,读取输入,计算数学运算等。
PLC指令的功能分为三类,包括输入/输出控制指令、数学运算指令和逻辑运算指令。
输入/输出控制指令用于控制PLC的输出,例如打开或关闭一个继电器。
数学运算指令用于执行加、减、乘、除等数学运算。
逻辑运算指令用于执行与、或、非等逻辑运算。
PLC指令的用法可以分为三步:输入指令,输入参数,执行指令。
首先,用户需要输入指令,根据不同的需求选择不同的指令类型,例如控制输出或者执行数学运算。
其次,用户需要输入参数,参数包括操作数以及可能的常量和变量。
最后,PLC将根据指令和参数执行相应的操作,输出结果。
在PLC程序中,通常需要使用多个指令来实现一项任务。
例如,在控制一个机器人的运动时,需要使用多个指令来控制它的各个部分的运动。
此外,PLC指令的顺序也非常重要,不同的顺序会影响程序的运行结果。
总之,PLC指令是PLC程序中最基本的单元,它可以控制输入、输出、执行数学运算和逻辑运算等操作,用户可以根据不同的需求选择不同的指令类型,并输入相应的参数来执行操作。
PLC基本指令介绍

PLC基本指令介绍PLC(可编程逻辑控制器)是一种数字电子装置,用于控制机械或工业过程中的自动化设备。
PLC使用一种特定的编程语言来控制设备的运行,该编程语言基于一组基本指令。
在本文中,我们将介绍PLC的一些基本指令及其功能。
1. XIC(X输入座)指令:XIC指令用于检测输入是否为ON(或True)。
当输入位为ON时,该指令返回True。
该指令通常用于读取传感器状态或其他输入设备的状态。
2. XIO(X输入整反)指令:XIO指令与XIC指令相反。
它用于检测输入是否为OFF(或False)。
当输入位为OFF时,该指令返回True。
XIO指令通常在需要读取非激活状态的传感器或其他输入设备状态时使用。
3.OTE(输出通常开)指令:OTE指令将输出位设置为ON状态。
该指令通常用于控制继电器、马达或其他输出设备。
4.OTL(输出通常开锁存)指令:OTL指令类似于OTE指令,但会将输出锁定在ON状态,直到重置指令被执行。
这意味着即使在执行了其他指令之后,输出位仍然保持ON状态。
5.OTU(输出通常关锁存)指令:OTU指令与OTL指令相反。
它将输出位设置为OFF状态,并在锁存到OFF状态前保持OFF。
6.ONS(输出一次周转)指令:ONS指令用于完成一次输出操作。
当条件满足时,该指令仅执行一次输出操作。
7.OSF(输出一次输入锁存分子)指令:OSF指令类似于ONS指令,但它与输入相关联。
当条件满足时,OSF指令将读取输入状态并执行一次输出操作,然后锁存该输入状态直到被重置指令执行。
8.MOV(移动)指令:MOV指令用于将一个输件(或输入位)的状态复制到一个输出位。
这对于控制信号传递、使能信号或数据输入到输出等情况非常有用。
9.ADD(加法)指令:ADD指令用于将两个操作数相加,并将结果保存在指定的地址中。
这对于计算数据值或执行计数操作非常有用。
10.SUB(减法)指令:SUB指令用于将两个操作数相减,并将结果保存在指定的地址中。
PLC指令

X:输入继电器Y:输出继电器M:辅助继电器L:锁存继电器B:链接继电器T:定时器C:计数器F:报警器D:数据寄存器R:文件寄存器W:链接寄存器SET:置位(使操作保持)RST:复位(使操作复位)BKRST:批量复位MC:形成新的母线(N~)由写入模式转为读取模式可见跳转触点MCR:回到原母线上NOP:空操作指令,在程序中占一个步序FEND:结束主程序END:结束顺序程序CJ:跳转( P~)STL(Step步 Ladder阶梯 Instuction指令)步进指令(S~)RET:步进返回I~:中断指针IRET:中断返回MOV:传送指令(十六位)DMOV:传送指令(三十二位)SMOV:移位传送指令FMOV:多点传送指令BMOV:块传送指令CPM:比较指令ZCP:区间比较指令CML:取反传送指令XCH:数据交换指令BCD、BIN:变换指令FF:交替输出LD:常开触点LDI:常闭触点OUT:输出逻辑运算的结果INV:取反(与之前的运算结果取反)AND:常开触点与前面的触点相串联ANI:常闭触点与前面的触点相串联ANDP:上升沿与前面的触点相串联ANDF:下降沿与前面的触点相串联ANB:并联路块与前面的触点相串联OR :常开触点与前面的触点相并联ORI:常闭触点与前面的触点相并联ORP:上升沿与前面的触点相并联ORF:下降沿与前面的触点相并联ORB:触点块与前面的触点相并联LDP:取脉冲上升沿(开关)LDF:取脉冲下降沿(开关)PLS:取脉冲上升沿(线圈即结果)PLF:取脉冲下降沿(线圈即结果)MPS:进栈MRD:读栈MPP:出栈D:表示该指令可以进行双字节传送P:表示该指令可以采用脉冲型K:代表十进制数H:代表十六进制数附:MEP:↑MEF:↓INC:加一DEC:减一H/T:高速定时器ST:累计定时器H/ST:高速累计定时器步进指令:①顺序执行类②选择分支类③并行分支类Kn+组件的起始地址,n表示组数,一组有四个位元件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MW10
IN
MW10
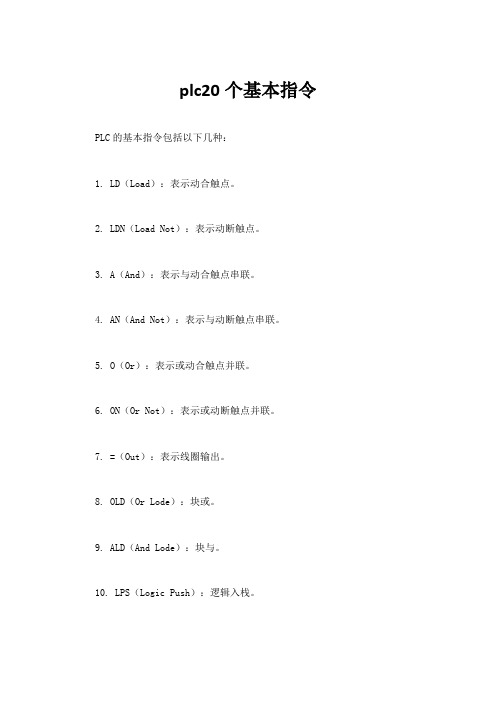
“与”运算
AC0 AC1 AC1 0001 1111 0110 1101 与运算 1101 0011 1110 0110 0001 0011 0110 0100 VW100 VW102 AC1
“或运算”
0001 1111 0110 1101 或运算 1101 0011 1010 0000 1101 1111 1110 1101 MW10 MW10
LD O O STOP
SM5.0 SM4.3 I0.3
//检查 I/O 错误 //运行时刻检查编程 //外部切换开关 //条件满足,由 RUN // 切换到 STOP 方式 // //
LD END
I0.5
//外部停止控制 //停止程序执行 // //
LD WDR
M0.4
//用触点重新触发 //看门狗定时器
例:
I0.0
END
LD END
I0.0
(2)停止指令:STOP 功能:使PLC从“RUN”工作模式切换到“STOP”模式。
例:
I0.0 STOP LD I0.0 STOP
2.监控定时器(看门狗)复位指令 WDR
监控定时器:S7-200配备了看门狗,它的定时时间为500ms, 每次扫描自动对看门狗复位1次,正常工作时一 般扫描周期小于 500ms 它不起作用。在系统出现 故障时扫描周期大于 500ms,它不能自动复位, 则发出系统故障报警且CPU停止运行。 WDR的功能:当程序过长时,可在程序中插入WDR指令使看 门狗复位,来避免看门狗误动作。
第5章 PLC的功能指令 功能指令 5.1.1 完成某种功能的功能块
5.1 S7-200的指令规约 使能输入与使能输出
5.1.2 梯形图中的网络 在梯形图中程序被划为一个个独立的段,每个独立的 段称为网络,一个网络中只能有一块独立电路。
按指令在什么情况下执行指令可分为:
(1)条件输入指令——必须有能流才能执行的功能块或线圈指令
例:在V存储区查找数据16#1234
Network1 SM0.1 Network1
MOV_W EN ENO OUT
AC1
LD SM0.1 MOVW +0, AC1
0
Network2 I0.1 VW102 16#1234 AC1 1
IN
注:SM0.1在程序运行第一 扫描周期闭合,常用于 系统初始化。
ENO
Q0.1
R 1
ATCH EN
INT_0 0
INT EVNT ATCH EN ENO
DTCH EN ENO
中断事件号
INT_1 2
ENI
0
EVNT DTCH EN ENO
INT EVNT
2
EVNT
5.6.4 常用状态字与中断事件号
1. 常用状态字SMB0 S7-200系列PLC中提供了一些状态字,这些状态字用于保 存PLC自身工作状态数据或提供特殊功能。SMB0各位的功能 描述见下表。
Network2
TBL_ FIND EN TBL PNT INDX CMD ENO
LD I0.1 FND= VW102, 16#1234, AC1
VW中事先存放的数据
VW102 0006 VW104 4568 VW106 1234 VW108 8732 VW110 1234 VW112 2346 VW114 6678 EC(实际填表数) d0 (数据0) d1 (数据1) d2 (数据2) d3 (数据3) d4 (数据4) d5 (数据5)
IN2
ADD-DI 双整数(32位整数)加法指令
ADD_R
ADD-R 实数(32位实数)加法指令
EN IN1 IN2
ENO OUT
编程举例 : 计算3500+5600的值
Network1
SM0.1
MOV_W EN ENO OUT
Network1
+3500
IN
VW120
LD SM0.1 MOVW +3500, VW120 MOVW +5600, VW122
查表 AC1 6
3. 转换指令 转换指令用于对操作数的类型(字节、整数、双 整数、实数、BCD数码之间进行相互转换)及数据和 码制之间进行相互转换,方便在不同类型的数据之间 进行处理或运算。 例:ASCII码到十六进制数的转换
LEN ATH
I0.0 VB100 4
LD I0.0 ATH VB100, VB200, 4 VB200 VB100 VB101 VB102 VB103 36 46 39 43
Network3
I0.1
C3 >=I +20 Q0.2
Q0.1
LD I0.1 AW>= C3, +20 = Q0.1
Network4
Network4
I0.2 C3 = =I +30
LD I0.2 OW= C3, +30 = Q0.2
5. 移位和循环移位指令 数据移位指令是对数值的每一位进行左移或右移, 从而实现数值变换。 例:移位控制
方法一:使用子程序调用指令 梯形图
SBR_N EN
语句表
CALL SBR_N
方法二:直接在程序编辑器中插入(参看教材)
例:子程序调用
MAIN Network1
I0.0
主程序
SBR_0 EN DIANJI EN
MAIN Network1 LD CALL I0.0 SBR_0
Network2
M0.0
Network2 LD EU CALL SBR_0 Network1 LD I0.1 = Q0.0 DIANJI Network1 LD = I0.3 Q0.1 M0.0 DIANJI
ENI
DISI
EN INT EVNT
ENO
中断连接指令 中断分离指令
DTCH EN EVNT ENO
中断允许指令 中断禁止指令
例:中断的使用
INT_0
MAIN Network1 I0.5 P
中断程序入口
Q0.0 s
2
Network1 SM0.0
Q0.0
R 1
INT_1 Network1 SM0.0
VW20, +1, +5
LD CALL
I0.0 SBR_0
//使能输入 //调用子程序 0 //本梯级为二级 //循环体的功能段
NEXT
//循环结束指令
LD INCW
SM0.0 VW100
//使能输入 //字增指令 //每执行一次一级 //循环体,VW100 //的值增 1
NEXT
//循环结束指令
VB100
IN
5.4 数据处理指令 1. 传送指令 传送指令可将单个数据或多个连续数据从源区传送 到目的区,主要用于PLC内部数据的流转。传送指 令根据数据类型的不同又可分为字节、字、双字及 实数传送指令。 例:当I0.0闭合时将VB100-VB103传送到AC1
I0.0 MOV_DW EN ENO IN OUT AC1 LD I0.0 MOVD VD100, AC1 VB100 VB101 VB102 VB103 12 34 56 78 MOVD 12 34 AC1 56 78
MOV_W EN ENO OUT
+5600
Network2
IN
VW122
Network2
I0.0 P VW120 VW122
ADD_I EN IN2 ENO IN1 OUT
QW0
LD I0.0 EU MOVW VW120, QW0 +I VW122, QW0
2. 逻辑运算指令 可以实现位、字节、字、双字的与、或、非、异或运算。 例:实现字与字之间的与、或、非运算。
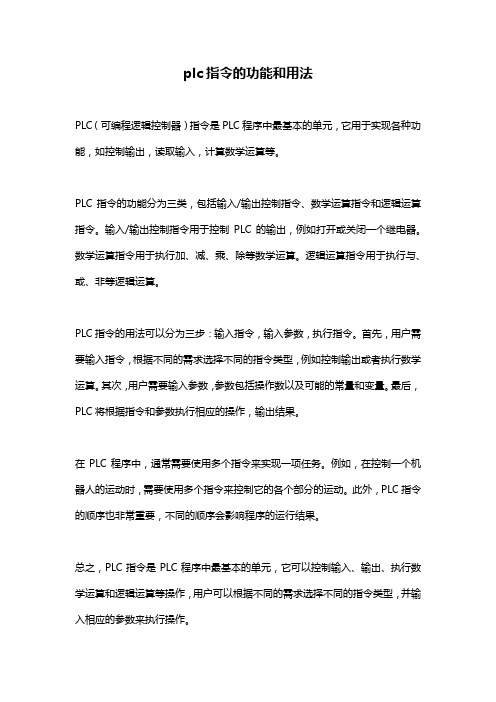
V100.3 Q0.0
5.5 运算指令 随着控制领域中新型控制算法的出现和复杂控制对控 制器计算能力的要求,新型PLC中普遍增加了数据运算 指令。数据运算指令分为算术运算和逻辑运算两大类。 1. 算术运算指令 算术运算指令包括加、减、乘、除及常用函数指令。 操作数的类型有整数、双整数、实数,操作数的类型 ADD_I 不同指令不同: EN ENO 如:ADD-I 整数(16位整数)加法指令 IN1 OUT
4.跳转指令 JMP 功能:类似C语言的转移语句 与跳转相关的指令有下面两条: (1)跳转指令 JMP,跳转指令。使能输入有效时,使程序流程跳到同 一程序中的指定标号 n 处执行。执行跳转指令时,逻 辑堆栈的栈顶值总是1。 (2)标号指令 LBL,标号指令。标记程序段,作为跳转指令执行时跳 转到的目的位置。操作数n为0~255的字型数据。
Network1
SM0.5 I0.0
C3 CU R CTU
Network1
LD LD CTU
SM0.5 I0.0 C3, +30
30
Network2
PV
Network2
注:SM0.5为一个1秒钟时钟 脉冲,0.5秒闭合; 0.5秒 断开。
C3 >=I +10
Network3
Q0.0
LDW>= C3, +10 = Q0.0
P
SBR_0 Network1
I0.1
子程序SBR-0
Q0.0
DIANJI Network1
I0.3
子程序DIANJI
Q0.1
Network2
I0.4 RET
Network2 LD CRET
MOV_B EN ENO OUT
MB10
I0.4
Network3
I0.5
Network3 LD I0.5 MOVB VB100, MB10