基于80C51系列单片机的盲人语音导航系统
基于8051单片机语音控制系统的实现
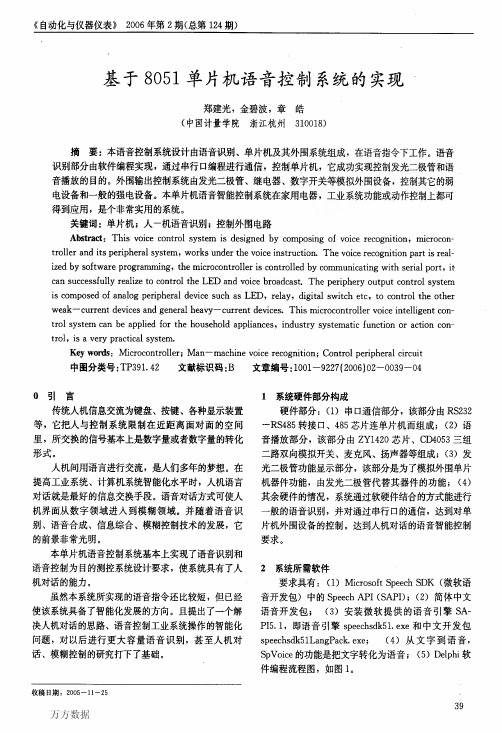
图5串口通信功能模块电路图
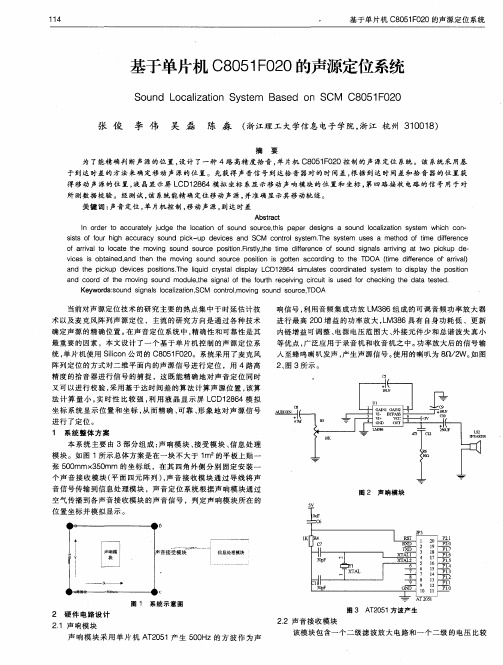
(5)本系统控制软件流程图(图6)
图4发光二极管功能模拟模块电路图
(4)串口通信模块:工作过程,当单片机接到串 行口COMl口发送过来的数据时,单片机程序标志 位[1ag置1,单片机开始判断传过来的数据,并与存 储的数据进行比较。
当识别出传过来的字符是YYl时,单片机将置 P3.6口高电平,所以语音芯片ZYl420的PLAYE 低电平,播放的是02H地址的录音,且绿色二极管 导通;
当识别出传过来的字符是YY2的时候,单片机 将置P3.7口高电平,语音芯片ZYl420的PLAYE 低电平,播放的是10H地址的录音,且红色二极管
万方数据
图6控制软件流程图
(6)系统硬件总体电路图(图7)
5结束语 本系统已实现了用语音识别、单片机控制、发光二
极管功能模拟的设计目的。并可以扩展其应用功能, 以更多地控制其它的弱电设备和一般的强电设备。
制系统中的应用研究(J3.合肥:合肥工大学报,2002 年lO月第25期 6张喜民,房师文,孙鹏博.1420语音芯片在单片机测量系 统中的应用(J].电测与仪表,2000年第10期
图7总体电路图
58 万方者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
郑建光, 金碧波, 章皓 中国计量学院,浙江,杭州,310018
自动化与仪器仪表 AUTOMATION & INSTRUMENTATION 2006,""(2) 3次
参考文献(6条) 1.方建淳 语音合成技术与单片机微机综合系统 1993 2.李朝青 单片机原理及接口技术 1999 3.石东海.周旭升 单片机数据通信技术从入门到精通 4.潘瑜 Delphi串口通信编程 2001
基于51单片机的智能盲人助行器的设计

文章编号:1007-757X(2021)06-0022-03基于51单片机的智能盲人助行器的设计严莉莉,张慎,胡应超,张宪萍(南京信息职业技术学院电子信息学院,江苏南京210023)摘要:介绍了以STC12C5A60S2单片机为控制器,结合超声测距模块、GPS信号接收模块、GSM模块和语音模块设计了一款智能盲人助行器。
该助行器通过超声模块和语音模块实现使用者周围障碍物探测和语音提醒,当使用者需要帮助时通过按键控制GSM模块发送GPS位置信息给指定手机号。
该助行器结构简单,操作方便,成本低廉,能够给盲人出行带来便利。
关键词:智能盲人助行器;GPS;GSM;超声模块;STC12中图分类号:TP368.1%TN871文献标志码:ADesign of Intelligent Walking Aids for the Blind Based on MCS-51YAN Lili,ZHANG Shen,HU Yingchao,ZHANG Xianpin g(School of Electronic Information,Nanjing Vocational College of Information Technology,Nanjing210023,China) Abstract:The paper introduces a kind of intelligent walking aid for the blind,it is designed to use STC12C5A60S2single chip microcomputer as controller and ultrasonic ranging module,GPS signal receiving module,GSM module and voice module.The walking aid can detect obstacles around the user and give voice reminders through the ultrasonic module and language module. When the user needs help,the GSM module can send GPS position information to the designated mobile phone number through the key control.The walking aid has the advantages of simple structure,convenient operation,low cost,and can bring conven-enceLoLheblindpeople.Key words:intelligent walking aid for the blind;GPS%GSM;ultrasonic module;STC120引言随着现代电子技术的迅速发展,各类生活用智能电子产品可谓是琳琅满目,比如:声控LED台灯、自动面包机、电子血糖仪等等,这些电子产品极大地方便了我们的生活,但是针对残障人士的智能电子产品依然较少&本文提出了以51单片机为核心控制器件设计的一款盲人智能助行器,该助行器能够通过超声避障和语音提醒帮助使用者及时避开周围障碍物,并且配置GPS和GSM模块,当使用者需要帮助时,可以一键发送自己的位置信息给指定手机号&由于盲人一般不能准确说出自己的位置,通过GPS 定位,方便家人能够及时找到*勺&11.1助行器结构及工作原理智能助行器以51单片机为控制核心结合超声波模块、语音模块、GPS模块、GSM模块和按键构成,其结构框图如图1所示&助行器使用时单片机通过控制安装在前方、左方、右方图1智能助行器结构框图的三个超声波模块探测周围两米内的障碍物,当某个方向有障碍物时,通过语音模块提醒使用者“某方向有障碍物,请小心!”而且助行器中安装的GPS模块实时接收使用者所处位置的经纬度信息,当使用者需要帮助时,可以按下控制键,通过GSM模块发送自己的位置信息短信给绑定手机号码,接收者可以通过经纬度信息获知具体位置,及时找到求助者所在位置&1.251单片机选型本文设计的智能助行器以51系列单片机为核心控制器,但是51系列的单片机型号众多,考虑到智能助行器中有GPS模块和GSM模块,这两个模块都是通过串行口和单片基金项目:江苏省大学生实践创新项目(201913112003Y)作者简介:严莉莉(1976-),女,硕士,副教授,研究方向:电子工程技术&张慎(1998-),男,大专,研究方向:测控技术&胡应超(1998-),男,大专,研究方向:测控技术&张宪萍(1999-),女,大专,研究方向:测控技术&・22机进行通信,所以在选择控制器时考虑选用具有双串口的单片机&本设计最终选用STC12C5A602作为控制器,它是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快812倍,而且具有双串口,能够满足本设计的需求&1.3超声避障语音功能实现超声避障功能是依据超声波方向性好、反射能力强的特点设计的&本助行器中超声模块采用HC-SR04,它可提供2cm-400cm的非接触式距离感测功能,测距精度可高达3mm,性能稳定,体积小,便于与微控制器连接在使用中单片机控制三个超声模块每隔2秒依次轮流发出超声波,当周围两米之内有障碍物时,单片机触发语音模块进行语音提醒,提醒使用者在某个方向有障碍物,请小心&语音提醒功能是通过WT588D语音模块来实现的, WT588D语音芯片是一款功能强大的可重复擦除烧写的语音单片机芯片,内置SPI-Flash存储器&WT588D提供了MP3控制模式、按键控制模式、并口控制模式、串口控制模式&本设计中使用了串口控制模式下的三线串口控制模式,三线串口控制模式由三条通信线组成,分别是数据DATA(P01)、片选CS(P02)、时钟CLK(P03),时序根据标准SPI 通信方式&音频输出采用PWM输出模式,直接连接扬声器。
基于51单片机的盲人避障系统设计

基于51单片机的盲人避障系统设计作者:刘旭蔡丽来源:《科教导刊·电子版》2016年第35期摘要随着单片机技术的广泛应用,盲人导航系统可以采用单片机进行设计,本文主要以盲人手杖为载体,以51单片机为核心,采用红外技术,通过语音模块提示实现盲人避障的目的,本系统主要由三部分构成,包括红外发射模块,红外接收模块和语音提示输出模块。
关键词单片机盲人拐杖导航中图分类号:TP368 文献标识码:A0引言目前盲人导航主要靠传统的手杖,不便为盲人提供路面信息,这类拐杖的弊端很多,只能通过手杖碰触感知前方地面物体,而难以发现较远的物体或者半空物体。
当前国内生产的导盲设备也存在各种问题,而国外成熟的手杖产品价格较贵,难以普及化,因此采用廉价的单片机进行盲人导航设计具有实际意义。
本文主要以盲人手杖为载体,以51单片机为核心,由红外发射模块、红外接收模块和语音提示输出模块组成。
通过红外技术,用语音模块提示实现盲人避障的目的。
本系统主要分析盲人前方或半空遇到障碍物时,当距离障碍物大于50CM以正常速度前进,当小于50CM时根据语音提示,停止或者拐弯,从而实现避障目的。
2硬件系统设计系统硬件组成如图1所示,利用单片机的中断对红外线发射管进行调制发射38KHz信号,发射距离远近可由可调电阻调节。
发射出去的红外线遇到避障物的时候反射回来,红外线接收管对反射回来信号进行解调输出TTL电平,在遇障碍物时控制电机并使基础机器人转向。
外界对红外信号的干扰比较小,且易于实现。
接收头采用HS0038A2型一体化接收探头,接收头的输出脚OUT与单片机INT0引脚相接,如图2所示。
红外接收头在没有接收到红外信号时,INT0输出高电平,单片机不中断。
在接收到信号时输出低电平,单片机中断。
目前单片机系列很多,比较常用的如Intel公司的MCS-48系列、MCS-51系列、MCS-96系列产品。
本系统中选用51系列中的AT89S51。
传感器选择至关重要,目前有超声波、红外、视觉、雷达等方式,各有优缺点,其中超声波夜间不受影响,但容易受到环境影响,如天气等;视觉传感器分辨率好,但是不能直接测量距离,处理过程相对复杂;雷达也不受夜间影响,但容易受灰尘等因素的影响;而红外传感器价格合理,检测距离满足要求。
基于单片机C8051F020的声源定位系统
张 俊 李 伟 吴 磊 陈 淼 ( 浙江理工大学信息电子学院, 浙江 杭州 3 1 0 0 1 8 )
摘 要
为 了能精 确判 断声 源的 位 置 , 设 计 了一 种 4路 高精 度 拾 音 , 单 片机 C8 0 5 1 F 0 2 0控 制 的 声 源 定位 系统 。 该 系统 采 用 基 于到达时差的方法来确定移动声源的位置。先获得声音信号到达拾 音器对的时间差 , 根 据 到 达 时 间 差 和 拾 音 器 的 位 置 获
等优点 , 广泛 应 用 于 录音 机 和 收 音 机 之 中 。 功 率 放 大 后 的 信 号 输 入至蜂呜喇叭发声 , 产生声源信号 。 使 用 的 喇叭 为 8 Q/ 2 W。 如 图
一种新型的语音导盲系统设计
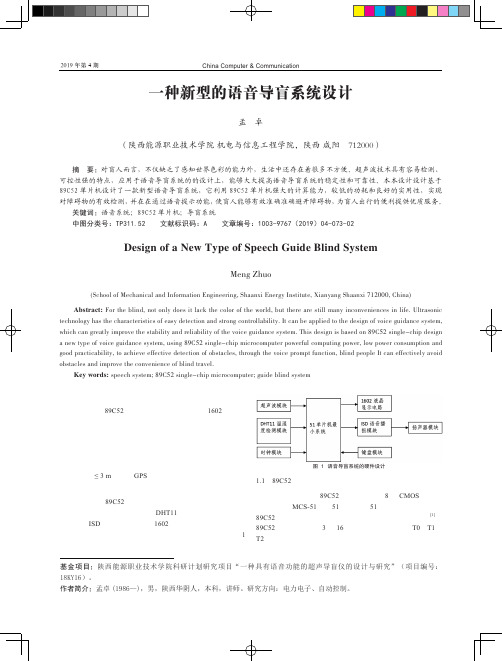
图1 语音导盲系统的硬件设计
1.1 89C52单片机
从性能上来看,89C52单片机是一款8位CMOS微控制
器,内核为MCS-51,即51内核,是51单片机的升级版本。
89C52单片机的体积较小,能够嵌入到语音导盲的硬件中[1]。
89C52单片机内还有3个16位的定时器,实现了T0、T1、
T2的同步计时功能,为本设计所选用的超声波模块提供强大
的计算能力,从而提高了超声波模块在测距方面的准确性。
陕西能源职业技术学院科研计划研究项目“一种具有语音功能的超声导盲仪的设计与研究”(项目编号:(1986—),男,陕西华阴人,本科,讲师。
研究方向:电力电子、自动控制。
基于51单片机的语音导盲系统的设计毕业设计

基于51单片机的语音导盲系统的设计摘要本文介绍了一款基于51单片机为核心的语音导盲系统的设计方案。
系统由两部分组成:一时超声眼镜探测器,二是语音提醒器。
探测器主要根据超声获取数据,经单片机处理后由无线模块发送出去。
语音提醒器有单片机控制,接收数据,然后驱动语音芯片提醒。
该系统具有成本低廉、使用方便等优点,是一款通用性较强的理想导盲设备。
研究了一种基于嵌入式体统和超声波测距系统的设计方案,应用移植嵌入式操作系统并给出障碍物检测优化方法,并且根据超声波测距的工作原理对障碍物进行距离测量。
实验结果表明,该系统在自然盲道情况下达到了处理实时性和判断的准确性要求,可较好地服务与盲人的独立出行。
关键词:51单片机语音提醒超声测距无线数传模块导盲系统;AbstractThis page mainly introduce a design of voice guide device based on 51 MCU .The device consists of two parts: Part one ——ultrasound glasses detector , Part two ——voice alarm device. Data gotten from ultrasound glasses detector has been put into process by 51 MCU and then be sent into air by wireless module. After that ,the voice alarm device will get the data from another a voice alarm .Cheap, convenience and other advantages make it a perfect device for blind man.Studies are made on the embedded systems and ultrasonic distance measurement system. Porting embedded operating system and giving optimization method for obstacle detection, and measuring the obstacles distance by ultrasonic ranging works. The experimental results she that the system achieved to deal with circumstance and judge accuracy of real-time requirements in a natural blind road, which may provide better serves for the blind’s independent travel.KEY WORD :51 MCU V oice alarm Ultrasound detector Wireless module Guide system for blind目录摘要 (I)Abstract (II)第一章绪言 (1)第一节总体方案 (1)第二章硬件电路的设计 (2)第一节超声模块电路 (2)第二节液晶显示电路 (6)第三节语音输出电路 (7)第四节无线模块电路设计 (8)第三章软件设计 (9)第四章结语 (11)致谢 (12)参考文献 (1)第一章绪言盲人群体一直是社会中需要关心的弱势群体,出门不便对于所有盲人患者是一个较大的难题。
C8051F040单片机在语音识别系统中的应用
C8051F040单片机在语音识别系统中的应用语音识别是人机交互的一种重要技术手段。
根据实际需要和应用场合的不同,语音识别可以分为孤立词识别和连续语音识别、特定人识别和非特定人识别。
语音识别追求的主要指标为高识别率、实时性和大词汇量;而对于一个语音识别系统,还应考虑软硬件设计简单、价格低廉、外围控制灵活、人机交互便捷等特点。
性能良好且成本低廉的语音识别系统在智能家电接口、智能玩具、智能仪器等领域提供便捷的人机交互服务,将具有广阔的应用前景。
语音识别系统构成语音识别系统主要包括识别单元选取、预处理、特征提取、模式匹配、参考模式库等几个部分。
根据模式识别的原理,对未知的语音的模板与已知语音的参考模板逐一进行比较,得到的最佳匹配的参考模板就是识别的最终结果。
语音识别的系统框图。
初步处理:语音信号首先经过话筒会变成电信号,之后进行初步处理。
初步处理包括对信号进行的滤波、数字化、预加重、分帧加窗以及端点检测等一系列步骤。
通过这些处理,将语音信号变成数字信号,并利用窗函数把语音数据序列分成连续的信号帧,找出信号中的语音部分。
特征提取:信号经过初步处理之后,进入特征提取单元进行特征分析和特征提取。
提取特征单元的功能一般是完成基于频谱的特征矢量的计算,提取出代表信号特征的参数,形成矢量模板。
语音帧的特征矢量按照一定的规则进行处理之后,作为参考模型和待识别语音的模板。
参考模型库:参考模型库就是语音信号的参考模板库,通常是对说话人进行多次重复的语音训练之后,使用平均或者聚类的分析方法,对这些语音信号进行一系列的分析和计算得到的特征矢量模板组成。
模板匹配:模板匹配单元完成特征矢量与已存语音信号模板之间的匹配计算。
将输入语音形成的特征矢量模板与训练得的到语音模板库进行分析比较,根据一定的搜索和匹配原则找出与参考模板中差别最小的特征矢量模板,然后根据此模板对应的语音信号找出识别结果。
语音识别系统的设计思想随着语音识别算法的发展以及嵌入式设备的运算能力的提高,在具有一定计算能力和存储空间的嵌入式硬件平台上实现语音识别,进而取代一些繁杂的直接操作已经成为了语音识别的重要发展方向。
基于单片机的红外检测盲人避障系统
毕业设计(论文)说明书本设计为红外检测盲人避障手杖器,其智能化功能设计要求如下:(1)正常情况下,人来后或有障碍后,第一阶段自动报警说明有人或障碍,人或障碍移动后,第二阶段自动报警说明前方无障碍;(2)如果遇到人或障碍太频繁,如使用间隔小于1min,则在第二个人或有障碍后,不进行二次的报警,避开障碍后,报警说明前方无人或障碍;(3)无障碍后自动进入省电模式。
2.2 系统组成及原理由图2.1可见,本系统主要包括红外发射、红外接收、单片机处理与控制系统以及控制信号放大与驱动等几个部分。
红外发射部分装有红外发光二极管,由红外发光二极发射红外光波,如果有障碍靠近,则红外光波受到人体的反射,反射回来的红外光波由红外接收部分接收。
红外接收部分接收到反射回来的红外光波后,红外光电传感器将此红外光信号转化为电信号,此电信号经放大、整形后传送到单片机。
单片机接收到驱动信号后,根据系统设计的需要做出相应的控制决策,输出相应的动作指令,由此来指挥执行部分执行相应的动作。
单片机发出的控制信号,传送给放大与驱动环节,由驱动电路驱动相应的执行机构,实现对手杖报警器的控制。
红外发射红外接收单片机处理部分放大驱动部分执行部分30H位寻址区16B 2FH 位地址20H 00H-7FH1FH 3区低128BRAM 18H R0-R717H 2区10H R0-R7工作寄存器区32B 0FH 1区08H R0-R707H 0区00H R0-R73.3各单元电路设计单片机所需要的控制信号不能是原始信号,因为单片机对其控制信号有一定的要求。
本系统对信号的处理使用了低通滤波电路、施密特整形电路以及正反放大等电路,下面做简单介绍。
3.3.1 低通滤波电路图3.1 低通滤波本系统采用的一阶RC低通滤波电路,如图3.1所示。
(1)传递函数电路的微分方程为:进行S域变换后可得 RC低通电路的传递函数是:(2)幅频响应令τ=RC,带入微分方程并取拉氏变换可得或者由此可得幅频关系为:由上式可知w=1/τ为该滤波器的截止频率,红外信号的频率是已知的,而τ=RC,因此,可以通过设定 R和C的值来设定滤波器的截止频率,使红外信号能通过滤波器而高于截至频率的信号被滤除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于80C51系列单片机的盲人语音导航系统西安科技大学能源学院王广征青松朱海龙张晶目录摘要: (1)关键词: (1)Abstract: (1)Keywords: (1)1.系统设计.........................................................................................................................1.1设计要求..................................................................................... 错误!未定义书签。
1.1.1设计任务.................................................................................. 错误!未定义书签。
1.1.2设计要求 (2)1. 2模块方案比较与论证 (2)1.3最终方案..................................................................................... 错误!未定义书签。
1.4系统整体方案设计..................................................................... 错误!未定义书签。
2.硬件实现及单元电路设计.............................................................................................2.1红绿灯控制箱发送红绿灯信号模块的设计 ............................. 错误!未定义书签。
2.2手杖接收红绿灯信号电路的设计 ............................................. 错误!未定义书签。
2.3超声波发射电路,超声波接收电路的设计 ............................. 错误!未定义书签。
2.4控制器电路的设计..................................................................... 错误!未定义书签。
2.5语音系统的设计......................................................................... 错误!未定义书签。
2.6高亮度闪烁二极管电路的设计 ................................................. 错误!未定义书签。
2.7电源模块的设计2.8手杖外观设计及各功能模块在杖上分布图3.软件实现..................................................................................... 错误!未定义书签。
3.1红绿灯控制箱发送红绿灯信号子程序流程图 ......................... 错误!未定义书签。
3.2手杖接收红绿灯信号处理及语音控制、闪烁灯子程序流程图错误!未定义书签。
4.系统功能测试............................................................................. 错误!未定义书签。
4.1测试仪器及设备......................................................................... 错误!未定义书签。
4.2功能测试..................................................................................... 错误!未定义书签。
5.结论................................................................................................ 错误!未定义书签。
6.结束语............................................................................................ 错误!未定义书签。
7.参考文献摘要:本盲人导航系统是以盲人行走常带的手杖为载体,AT89S52单片机为控制核心,加以高亮度发光二极管闪烁、超声波发射、超声波接收、红外发射、接收、ISD1760语音模块和电源电路以及其他电路构成。
系统由三大部分组成在红绿灯控制箱内加入了89S52控制的红外发射系统、地面的标识、手杖系统。
关键词:盲人AT89S52 高亮度发光二极管测障红外Abstract:Keywords: AT89S521.系统设计1.1.1 设计要求1. 2模块方案比较与论证1.2.1 盲人过十字路口的时候需要知道自己在十字路口的什么位置、以及自己想去的方向是否是绿灯及绿灯持续时间够不够穿过马路的。
确定自己的位置有一定的难度,在城市的人行道上有专为盲人铺设的条形盲道,盲人可以通过手杖的探测知道在何处过马路但是很难确定自己所处十字路口的位置:方案一,采用常用的指南针结合单片机通过霍尔元件采集指针磁信号语音报告方向的制作方向识别,但由于机械指南针的指针灵活性太强,磁场微弱,轻微的震动及周围其它磁场源的干扰都会造成误识别。
方案二,采用电子指南针传感器,该传感器由一对垂直安放的传感器组成,通过单片机可以很精确的读出盲人所面对的方向,但这种传感器价格高且不易买到,另外好多十字路口并不是标准的正东正西的,即使是确定了实用性也很差。
探知红绿灯情况:方案一,由道路红绿灯控制箱将点亮绿信号灯的信号线分出一只经过降压好光耦隔离通过单片机采集控制无线发射系统将路口红绿灯情况发射到路口周围空间,安装在盲人手杖中的接收系统将接收到的信号与自身相对位置及面对方向进行对比并控制语音系统通过扬声器告知盲人。
这种方案中第一位置识别较难实现,第二,单片机的编程实现较复杂。
通过积极地思考找到了一种较为简单,容易实现且效果很好的解决办法,具体如下:1.自身位置的确认和红绿灯的确认为此在本设计中专门设计了一种盲人可以很容易确认的方向标识砖,将这种板砖按如图(1)中所示铺设在盲道与十字路口相接的地方,板砖上的凸起图案必须保证如图示方向放置。
另外红绿灯控制箱也只向外提供一个信息即如图(2)中A C方向绿灯的信息。
在本方案中一改变前面试图确定东南西北的想法,只是使盲人清楚的知道自己所要去的方向与红绿灯控制箱提供绿灯信号之间的关系。
下面对照图(2)解释一下设计原理:红绿灯控制箱工作时一直向十字路口周围空间发出路口单一方向(图(2)中AC方向)红绿灯信息情况,即如果此时AC方向是绿灯且有足够的时间通过B区红绿灯控制箱就会向十字路口周围空间发出绿灯信号,反之如果AB方向是红灯或已经没有足够时间供盲人通过红绿灯控制箱就向外发射红灯信号。
图(1)盲人导航系统地面标识如在1区有一盲人想要通过B斑马线到达2区,情况一:首先,当他走到十字路口时手中的手杖接收到一个绿灯信息,经手杖中的单片机处理后控制扬声器发出:“路面标识方向可以通过!”的提示音。
接着,盲人用手中的手杖在板砖上探知路面标识方向如果与自己的目的方向一致,盲人就可以安全的通过马路了,如果探知的方向与自己的目的方向不一致那么就需要等待了。
图(2)十字路口模型图情况二:当他走到十字路口时手中的手杖接收到红灯信号,经手杖中的单片机处理后控制扬声器发出:“路面标识方向不可以通过!”的提示音。
接着,盲人用手中的手杖在板砖上探知路面标识方向如果与自己的目的方向不一致,盲人就可以安全的通过马路了,如果探知的方向与自己的目的方向一致那么就需要等待了。
2.硬件实现及单元电路设计2.1红绿灯控制箱发送红绿灯信号模块的设计2.2手杖接收红绿灯信号电路的设计2.3超声波发射电路,超声波接收电路的设计(1)传感器的比较识别障碍的首要问题是传感器的选择,下面对几种传感器的优缺点进行说明(见表3.1)。
探测障碍的最简单的方法是使用超声波传感器,它是利用向目标发射超声波脉冲,计算其往返时间来判定距离的。
该方法被广泛应用于移动机器人的研究上。
其优点是价格便宜,易于使用,且在10m以内能给出精确的测量。
不过在ITS系统中除了上文提出的场景限制外,还有以下问题。
首先因其只能在10m以内有效使用,所以并不适合ITS系统。
另外超声波传感器的工作原理基于声,即使可以使之测达100m远,但其更新频率为2Hz,而且还有可能在传输中受到它信号的干扰,所以在CW/ICC系统中使用是不实际的。
视觉传感器在CW系统中使用得非常广泛。
其优点是尺寸小,价格合理,在一定的宽度和视觉域内可以测量定多个目标,并且可以利用测量的图像根据外形和大小对目标进行分类。
但是算法复杂,处理速度慢。
雷达传感器在军事和航空领域已经使用了几十年。
主要优点是可以鲁棒地探测到障碍而不受天气或灯光条件限制。
近十年来随着尺寸及价格的降低,在汽车行业开始被使用。
但是仍存在性价比的问题。
(2)超声波障碍检测超声波是一种在弹性介质中的机械振荡,其频率超过20KHz,分横向振荡和纵向振荡两种,超声波可以在气体、液体及固体中传播,其传播速度不同。
它有折射和反射现象,且在传播过程中有衰减。
利用超声波的特性,可做成各种超声波传感器,结合不同的电路,可以制成超声波仪器及装置,在通讯、医疗及家电中获得广泛应用。
作为超声波传感器的材料,主要为压电晶体。
压电晶体组成的超声波传感器是一种可逆传感器,它可以将电能转变成机械振荡而产生超声波,同时它接收到超声波时,也能转变成电能,故它分为发送器和接收器。
超声波传感器有透射型、反射型两种类型,常用于防盗报警器、接近开关、测距及材料探伤、测厚等。
本设计采用T/R-40-12小型超声波传感器作为探测前方障碍物体的检测元件,其中心频率为40Hz,由80C51发出的40KHz脉冲信号驱动超声波传感器发送器发出40KHz的脉冲超声波,如电动车前方遇到有障碍物时,此超声波信号被障碍物反射回来,由接收器接收,经LM318两级放大,再经带有锁相环的音频解码芯片LM567解码,当LM567的输入信号大于25mV时,输出端由高电平变为低电平,送80C51单片机处理。