基于CAN总线改进的机车数据采集系统
基于单片机的CAN总线数据采集设计与实现

基于单片机的CAN总线数据采集设计与实现一、背景介绍CAN(Controller Area Network)总线是一种现代化的通信协议,在汽车、工业控制和航空航天等领域得到了广泛的应用。
CAN总线具有高速传输、可靠性强、抗干扰能力强等特点,因此成为了现代化设备控制系统中不可或缺的部分。
基于单片机的CAN总线数据采集设计与实现,则是将单片机与CAN总线相结合,实现对CAN总线上的数据进行采集与处理,为现代化设备控制系统提供了稳定可靠的数据采集手段。
本文将介绍基于单片机的CAN总线数据采集的设计与实现过程。
二、设计原理1. CAN总线基本原理CAN总线是由BOSCH公司在1986年提出的一种串行通信协议,用于解决现代汽车中分布式电子系统的通信问题。
CAN总线采用了差分信号传输、抗干扰能力强、支持多主机通信等特点,因此在汽车电子领域得到了广泛的应用。
CAN总线的基本原理是采用数据帧的方式进行通信,数据帧包括了ID域、数据域、CRC校验等部分,通过CAN总线共享数据,实现了各个节点之间的通信。
在采集数据的过程中,需要对CAN总线上的数据进行解析,以获取需要的数据信息。
2. 单片机与CAN总线的通信单片机与CAN总线的通信可以通过CAN控制器实现,通常采用CAN芯片作为接口。
CAN 芯片负责与CAN总线进行通信,并将数据传输给单片机,单片机利用自身的处理能力对数据进行解析、处理,实现对CAN总线上数据的采集与控制。
在单片机与CAN总线的通信中,需要定义好通信协议,包括数据帧格式、ID定义、数据解析方式等,以确保单片机能够准确地获取需要的数据信息。
三、设计流程基于单片机的CAN总线数据采集设计与实现的流程包括了硬件设计、软件设计与测试验证三个基本环节。
1. 硬件设计硬件设计主要包括了单片机选型、CAN芯片选型、电路连接设计等内容。
在选型时需要考虑单片机的处理能力、通信速率要求、接口协议支持等因素,根据系统的应用场景选择合适的单片机和CAN芯片。
浅谈基于CAN现场总线的数据采集系统

总 线之 间 的接 口 , 可 以提供 对 总线 的差分 发送 能力 它 和对 C AN 控 制器 的 差 分接 收能 力 ,抗干 扰 能 力强 。
内设 限流 电路可 防止发送输 出级对 电池 电压 的正端和 负 端短 路 。
现 场 总线 实 际上就 是 工控 领域 的计 算机 局域 网 。
站机 ( 上位机) 与采集机通讯时 , 系统只需一对
导 线 就 可实现 数 据 的发送 和接 收 , 但这 一对 导线 是有
极性 的 , 网络上 设备 的 C AN—H连接 在一 起 、C AN—
L连接 在一 起 。 总线 终端 接 l 0 2 o ~l0Q电 阻 以抑 制
线不仅 使 采集机 与上 位机 连接 简 便 , 且纠 错误 码 率 而 可 达 l叫 ,通 信可 靠 。 0 在铁 路信 息化 建设 中,C AN现 场 总线 技术 以其 卓 越 的性能 在 铁路列 车 调度 指挥 TDC 系统 、 S 电务 计
另外 ,为 了增强 C AN总 线节 点 即各采 集机 的抗 干 扰 能力 ,采 集机 C U 0 9 KB的 C P 8 C16 ANTX 和
Ab t a t Th a e , a i g s g a o io i g s se a n e a l , n r d c s t e CAN i l u sr c : e p p r tk n i n l m n t rn y t m s a x mp e i to u e h fe d b s b s d d t o l c i g m e h d a e a a c l tn t o . e K e r s F e d b s Da ac l c i n a d Co t l r o a a e e wo k y wo d : i l u , t o l t , n n r l c l r an t r e o o e l
基于CAN总线的列车控制与监测系统在深圳地铁4号线的应用

R I OM 具 有数据 采集 和控 制功 能及数 据记 录功 能 , 其中, 关 于数 据采集 和 控 制 功 能 , 本 系统 的 特别 之 处 在
于 RI OM 设 置 了 处 理 器 , 具 有如下 功能 :
的工作 , 列 车 的可 靠 性 及 列 车 数 据 传 输 速 度 得 到 了保
VT C U 马 上 自动 接 替 强 主 VTC U 的 工作 , 保 证 列 车 的
正常 运行 。
VT c u 主要 负 责 列 车 状 态 、 过 程 数 据 及 故 障信 息 的收 集和 处理 ; 故 障的存储 及评 估 ; 故 障记 录 ; 列 车总线
网络 的 管 理 ; 控 制 整 列 车 所 有 微 机 控 制 单 元 的 时 钟 同 步
C A N 总 线上 。
车状 态信 息发 送 给 VT c u, 以便 VTc U 实 时 了解 非 微
机控 制 系 统 和 列 车 的 状 态 , 同 时 VT C U 也 可 以 通 过
R I OM 来 控 制 非 微 机 控 制 系 统 。 本 项 目列 车 上 照 明 、 受
电弓 、 列 车状 态 ( 来 自列 车 线 ) 是非微机控制 系统, R I —
已消失故 障 在 D DU 上 都 有 明确 显 示 , 同 时 有 声 音 提 示, 并要求 司机 确认 。
4 T C M S设 备 接 口及 数 据 流
本项 目 T C MS系 统 接 口具 有 如 下 3种 类 型 。
( 1 ) C AN 接 口设 备直 接连接 到 C AN 网上 ; ( 2 ) R S 4 8 5接 口设 备通 过 Rs 4 8 5 / C AN模 块连 接 到
基于CAN总线的机车通信与监控系统

● D C 数据长度代码。表 示在数据帧 中字节 的 L: 个数( — 位) 0 8 。
] 匦砸匦口圈 ] 匿噩哑
,
… 匿 … 田
C N总线采用 多主方 式通信 , A 其上 的节 点数可达
罔 1 具有扩展和标 准标 志符 的数 据帧
l 个, l O 且每个节点 都可 主动 向网上 的其它节 点广播信 息, 通信方式灵活 ; 通信介质可以是双绞线、 同轴 电缆或 光导纤维, 通信速率可达 1 bs通信距离可达 1K ; M p, 0 i 被 n 传送 的信息分成不 同的优先级, 当两个节点同时发送数
据时, 发送高优先级信息 的节点 , 继续发送信息 , 而发送 低优先级信息的节点主动让 出总线 , 这种非破坏性的总 线裁决方案使 C N具有非常好 的实时陛; A 采用短帧结构
● 数据位 : 字 1 字用 于保存一个 C N信息 的 8 4 6 A 个字节( 最大) 数据域。 ● C C 包含一个 6 R: 位循环冗余检查计算 , 绝大部
ห้องสมุดไป่ตู้
为解决现代汽车中众多的控制与测试仪器之间的数据交 换而开发的一种串行数据通信协议。在电子汽车行业里 使用 C N连接发动机控制单元 、 A 传感器、 防刹车系统 , 其 传输速度可达 1 bs M p。同时可将 C 安装在卡车本体的 N A
电子控制系统里 , 诸如车灯组 , 电气车窗等等 , 以代替 用
李 白燕 朱建林 罗伟斌 张建华
( 湘潭大学信息工程学 院, 湖南 湘潭 4 10 ) 115
摘 要: 本文介绍了利 用 DP S 芯片 T S2I20A的 C N模块 开发 C N总线在矿用小机车上的应用。利用 C N总线将采集到的各控制模块的信息 M 30F47 A A A
毕业设计(论文)-纯电动汽车电池管理系统(bms)[管理资料]
![毕业设计(论文)-纯电动汽车电池管理系统(bms)[管理资料]](https://img.taocdn.com/s3/m/99efb7f5cc17552706220805.png)
摘要随着工业发展和社会需求的增加,汽车在社会进步和经济发展中扮演着重要的角色。
汽车工业的迅速发展,推动了机械、能源、橡胶、钢铁等重要产业的发展,但同时也日益面临着环境污染、能源短缺的严重问题。
纯电动汽车以其零排放,噪声低等优点越来越受到世界各国的重视,被称作绿色环保车。
作为发展电动车的关键技术之一的电池管理系统(BMS),是纯电动车产业化的关键。
车载网络数据采集系统就是这样一个电池管理系统,可以直接检测及管理电动汽车的储能电池运行的全过程,实现对车载多级串联锂电池、电池温度、车速等数据的监测、采集和分析。
本论文是基于CAN总线的车载网络数据采集系统选用STM32F103VB作为系统的核心芯片,通过芯片自带的12位ADC对端口电压分别进行采集和监测,并通过CAN网络将采集到的数据发送到汽车仪表盘,为车辆状态量实时监测提供数据来源。
关键词:纯电动车,电池管理系统,电池状态,STM32F103VBAbstractWith industrial development and social demand, vehicle of social progress and economic development play important roles. Although the rapid development of automobile industry promote the machinery, energy, rubber, steel and other important industries, it is increasingly faced with environmental pollution, energy shortages and other serious problems.With the merit of zero-emission, and low noise, the pure electric vehicles which is called green cars has got more and more attention around the world. As one of the key technologies for the development of electric vehicles ,battery management system (BMS) is the point of the pure electric vehicle industry. Vehicle network data acquisition system is a battery management system that can directly detect and manage the storage battery electric vehicles to run the whole process, to achieve the data monitoring, collection and analysis of the on-board multi-level series of lithium battery, battery temperature, speed, and otherThe thesis is based on the vehicle CAN bus data acquisition system to chose STM32F103VB network as the core of the system ADC which comes from the chip collect and monitor the port voltages and sent the collected data to the car dashboard through the CAN network , which offer real-time monitoring of vehicle status amount of data sources.Key words:Pure electric cars, Battery Management Systems, The battery state, STM32F103VB摘要 (1)Abstract (2)第一章前言 (5)本课题研究的目的和意义 (5)车载网络数据采集系统的国内外研究现状 (6)本论文研究的主要工作 (7)第二章车载网络数据采集系统设计的原理 (9)车载网络数据采集系统的功能概述 (9)车载网络数据采集系统的结构 (10)基于STM32的车在网络数据采集系统设计控制框图 (10)信号的采集与处理 (11)车载系统的网络通讯 (12)CAN网络的基本概念 (12)CAN网络在车载数据采集系统中的应用 (13)系统主要性能指标 (14)系统预期误差的评估 (15)第三章基于STM32F103VB数据采集系统的硬件设计 (16)STM32F103VB简介 (16)STM32F103VB电源模块的设计 (18)电源电路的设计 (18)STM32启动模式电路选择设计 (18)STM32F103VB外围接口电路的设计 (19)模数转换器的电路设计 (19)测温电路设计 (20)复位电路的电路设计 (21)STM32F103B通讯电路的设计 (21)CAN通讯接口电路设计 (21)JTAG程序调试接口电路设计 (22)RS485通讯电路设计 (23)第四章基于STM32数据采集系统的软件设计 (25)Keil uVision3平台简介 (25)基于STM32的车在网络数据采集系统的程序设计 (25)数据采集模块程序设计 (26)LCD显示模块程序设计 (27)数据存储模块程序设计 (27)CAN数据通讯模块程序设计 (28)RS485通讯模块程序设计 (28)第五章误差分析与处理 (29)误差概述 (29)误差的主要来源 (29)误差的处理 (29)误差分析 (30)测控系统的非线性 (30)系统工作环境的噪声 (31)系统的稳定性 (31)误差处理 (32)实测电压数据分析 (32)整机PCB板设计 (33)第六章总结与展望 (35)总结 (35)展望 (35)参考文献 (36)致谢 (36)第一章前言本课题研究的目的和意义随着世界工业经济的不断发展和人类需求的不断增长,对全球气候造成严重的影响,二氧化碳排放量增大,臭氧层遭受到破坏等。
基于CAN总线新型分布式数据采集系统的研发
康 孝 高
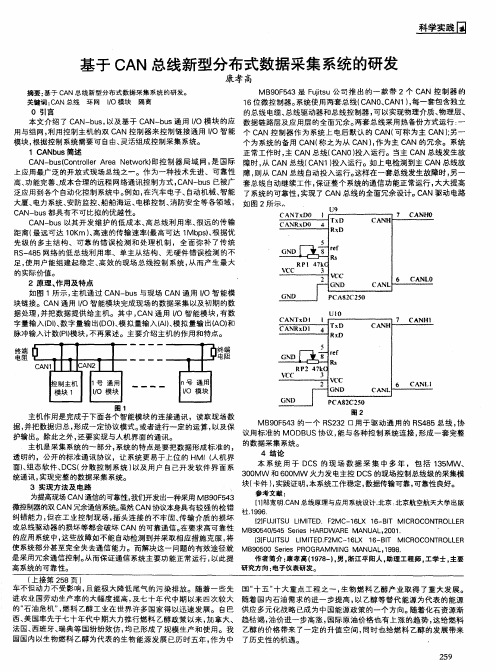
MB 0 5 3是 F js 9F4 ui u公 司 推 出 的一 款 带 2个 C t AN 控 制 器 的 1 6位微控制器。 系统使用两套 总线( AN 、 AN1 , C 0C )每一套包含独 立 0 引 言 的总线 电缆 、 总线驱动器和总线控制器 , 以实现物理介质 、 可 物理层、 本文介绍 了 C — u , AN b s 以及基于 C N b s通用 l A —u , 0模块 的应 数 据 链 路 层 及 应 用 层 的 全面 冗余 。 套 总 线 采 用 热 备份 方式 运 行 : 两 一 用 与 组 网 , 用控 制 主 机 的双 C N 控 制 器 来 控 制 链 接 通 用 I 智 能 个 C N控 制 器 作 为 系统 上 电 后 默 认 的 C 利 A / O A AN( 称 为主 C 可 AN) 一 : 另 模块 , 根据控 制系统需要可 自由、 灵活组成控制采集系统。 个 为 系统 的 备用 C ( 之 为从 C N)作 为 主 C N 的 冗 余 。 系 统 AN 称 A , A 1C N u A b s简述 正 常工作时 , C N总线( A 0) 主 A C N 投入 运行 。当主 C N总线发生故 A C — u (o t lrAra N t r) AN b sC nr l e ewok即控 制 器 局 域 网 , 国 际 障时, C oe 是 从 AN总线( A ) C N1 投入运行。如上 电检测到主 C AN总线故 上应用最广泛 的开放式现场 总线之一。作为一种技术先进、可靠性 障 , 则从 C N总线 自动投入运行。 A 这样在一套总线发生故障时 , 另一 高、 功能完善、 成本合理 的远程 网络通讯控制 方式 , AN b s已被广 套 总线 自动继续工作 , C —u 保证整个系统 的通信功能正常运行 , 大大提高 泛应用到各个 自动化控制系统 中。 例如 , 在汽车 电子、 自动机械 、 智能 了系统 的可靠性 , 实现 了 C AN总线 的全面冗余设计 。 AN驱动 电路 C 大厦 、 电力系统 、 安防监控 、 船舶海运 、 电梯控制、 消防安全等各领域 , 如 图 2所 示 U9 C N— u 具 有 不 可 比拟 的优 越 性 。 A b s都 CA x ) 10 h D H C —u AN b s以其开发维 护的低成 本、 总线利用 率、 高 很远 的传输 CANRx D0 Rx _1 D - l 距离( 最远可达 1 K 、 0 m)高速 的传输速率《 最高可达 1 p )根据优 Mb s、 先级 的 多 主 结 构 、 可 靠 的错 误 检 测 和 处 理 机 制 ,全 面 弥 补 了传 统 rf e R 一8 S 4 5网络的低 总线利用率 、单主从结构 、无硬件错误检测的不 足, 使用 户能 组 建 起 稳 定 、 效 的现 场 总线 控 制 系统 , 而 产 生 最 大 高 从
基于CAN总线技术的智能汽车系统的设计
《装备制造技术》2012年第8期随着汽车功能的增加与电子控制技术的普遍应用,汽车电气件越来越多,电线也会越来越多,汽车上的电路数量与用电量显著增加,线束也就变得越粗越重。
如何使大量线束在有限的汽车空间中,更有效合理地布置,使汽车线束发挥更大的功能,已成为汽车制造业面临的问题。
CAN总线技术的开发,对于汽车电子控制系统的应用无疑是一个突破,并将得到更大的发展。
1CAN总线概述CAN(ControllerAreaNetwork的缩写),即控制器局域网络。
CAN总线是由德国BOSCH公司于1986年进行开发,并随后通过国标ISO11898及ISO11519,如今已经成为国际上被最为广泛应用的工业现场总线之一。
尤其在欧洲和北美地区,CAN协议已经是汽车网络的标准协议,成为汽车计算机控制系统和控制局域网的标准总线。
在目前的汽车产业中,为了满足对于汽车安全性、便捷性、舒适度、低成本等多种要求,各种不同的电子控制系统不断被开发,并应用于汽车产业中。
但是由于这些电子系统之间通信时所需要的数据类型及要求有不同之处,所以,就要由很多条总线构成,并且不同的地方越多,电气件也越多,电线也就越多,线束也就变得越粗越重。
而与一般的总线相较,CAN总线在数据通信的应用中,拥有十分突出的实时性、可靠性和灵活性等优势,其性能良好、设计独特,与传统线束比较,多路传输装置大大减少了导线及联插件数目,使布线更为简易,因此,越来越受到人们的重视和青睐,并且被广泛应用在汽车领域。
因此,为了适应“减少线束的数量”等要求,先进的汽车就引入了CAN总线配置,采用多路传输系统。
如世界上著名的汽车制造商BMW(宝马)、BENZ(奔驰)、ROLLS-ROYCE(劳斯莱斯)等等都采用了CAN总线,作为控制总线,用来实现汽车内部的系统控制和检测执行机构之间的数据通信。
2智能汽车和智能汽车系统智能汽车具有自动驾驶的功能,并且集计算机、信息处理和控制、通讯和传感器等多种高端技术于一身。
基于CAN总线的分布式数据采集系统
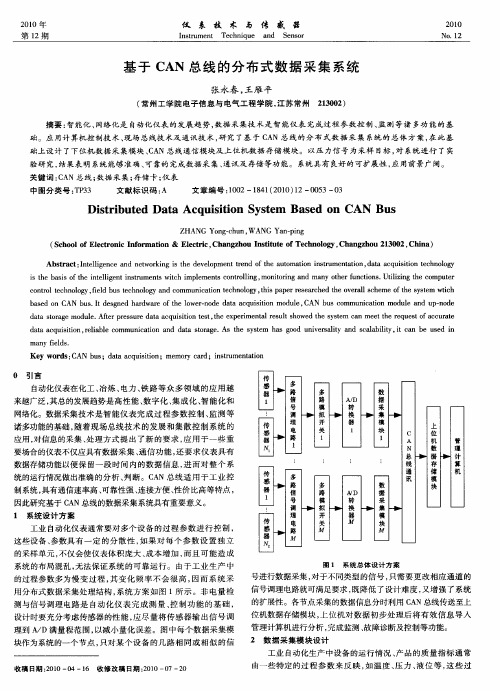
d t c u st n, l b e c mmu iai n a d d t tr g . h y tm a o d u ie slt n e lb l y,tc n b s d i aa a q ii o r i l o i ea n c t n aa so a e As t e s s o e h s g o n v rai a d s a a i t i a e u e n y i
ma y feds n l . i K e wo s: y rd CAN us;d t c iiin;me r a d;i tu n ain b aa a qusto mo y c r nsr me t t o
基于C8051F045的CAN总线在机车状态监测诊断中的应用

21 0 0年 1 2月
铁 道 机 车 车 辆
RAI AY I W L0C0M OTI VE & CAR
V 0 . O No. 13 6
De . e 2 0 01
文章编 号 :0 8 8 2( 0 0 6 0 4 4 1 0 —7 4 2 1 )0 —0 0 —0
系统 , 主控计算 机通 过 程控 接 口读 回数 据 , 定结 果 是 判
因素 的影 响 , 如减 少操 作 信 号源 误 差 、 示波 器 误 差等 读 引起 的测试 问题 。测试 结束后 , 能够 自动 生成不 可编辑
的测 试报告 , 确保 测试 结 果 的真 实 性 , 而能 够 充分 保 从 证产 品的质 量 , 提高生 产 效 率 。引 人数 据 库 , 强数 据 增 管理 功能 , 据 的可追 溯 性 强 。根 据记 录 的历史 数 据 , 数
大 学 出 版 社 , 9 9 19.
自动化测试 设备 具有 对 TC C U 的功能 及 其 中的板 U/ C 卡进 行 自动化测 试 的功 能 。在 测试 过 程 中减 少 了人 为
De e o m e to h t m a i s v c o h v lp n f t e Au o tc Te tDe i e f r t e
丁 国 君 ( 9 6 )男 , 南 商 丘 人 , 士 生 修 回 日期 : 0 0 8 2 1 8一 河 博 ( 2 1 —0 —1 )
和连 接 电缆 ( 激励信 号 ) 载到 被测板 卡 ; 加 测试 结果 再通 过连接 电缆 ( 电及结 果 ) 供 连到转 接板 , 然后再 回到测 试
基 于 C 0 1 0 5的 C 8 5F 4 AN总线在 机 车状 态 监测诊 断 中的应 用
基于CAN总线的机车运用状态实时监测系统

模块, 并设计 了 C N总线的硬件 电路 ; A 完成了机车运行记录监控装置 、 电网电压 、 电机及故障显示屏信息 的实时采集 牵引
关键词: A C N总线 ; 状态监测 ; 电力机车
中图分类号:P 3 ;P 7 T 36T24
文献标识码 : A
文章编号:17 — 17 2 o )4 04 — 3 62 18 (o 7 0 — 0 6 0
铁路 提 速后对 机 车 的安全 性 提 出 了更 高 更严 的 要
设备划分为不 同的模块不仅 可降低 开发难度也为 以后的 扩展提供方便 。 但这样一来 , 就必须考虑这些不同的模块 如何进行连接 、 如何使各个模块协 调地工作 。 为了使整个
系统能够成为有机的整体 ,就需要选择适 当的网络拓扑
( o ee f l tc l n fr a o 。 iu nv r t, h n d 1 0 9 C ia C l g e r a a dI om t n X h a i s y C e g u 6 3 , h ) l oE ci n i U ei 0 n
Ab t a t h a e ul sad s i u e y tm a e n C sr c :T ep p r i i r td s se b s do AN u . ewh l y tm ii e no s v r d ls c o dn b d tb b s T o es se i d vd d it e ea mo u e c r i g h s l a t d f r n q ime t o o o t e T e h r wae cr u to AN b s i d sg e . e r a - i ntrn y tm a ee t o i e e te u p ns f c moi . l v h a d r i i fC u s e i d T e t c n h l me mo i ig s s o e c n d tc
基于CAN总线的发动机虚拟仪表数据采集系统的设计

虚拟仪 表 可以使 多种仪 表共 享计算 机资 源和数 据采
集设 备 , 而大大 增强 了仪表 的功 能和 降低 了成本 。 从
应用 现场 总线 与虚拟 仪表 技术相 融合 的测控 系统将
一
母周
会充 分发 挥这 两种技 术 的优势 ,形成 互补 。可 以预
见 .现场 总线与 虚拟 仪表 技术 的融合将 是工业 自动
l 9
率低 , 般 在 1 以 内 , 一 K 而且 往 往 附加 了很 多 干 扰 ,
值 的变 化 量 。 因此 对 它 们 的 调 理 电路 原 理 基 本 相
同 , 是 参 数 有 所 不 同 。 如 图 4所 示 。 只
前 置 调 理 电路 的仪 表 采 集 系 统 的 结 构 设 计
本 文 的数据 采集 系统 主要完 成传感 信号 的处理
以及 对 发 动 机 的工 况 数 据 采 集并 将 数据 通 过 C N A
要想 得到精 确 的测 量数 据 ,传感 器的选 择是非
常重要 的 , 因此 , 本文频 率信 号的测量 选用具 有 良好
1 8
内 燃 机 与 配 件
2 1 年第 5 01 期
基 于 CAN总线 的发 动机虚 拟 仪表 数 据 采集 系统 的设计
De i n o t q iii n S se o g neVit a n tu e sg fDa a Ac u sto y tm f r En i r u lI sr m nt Ba e n CAN sdo BUS
低 速性能 和抗 干扰性能 的霍尔式 传感 器 。车速 传感
器输 出的不 是标 准的方 波信号 ,输入 的脉 冲信号频
总线送 上位 机 。具体是 以 飞思卡 尔公 司生产 的微控
基于CAN总线的混合动力机车控制系统研究

基于CAN总线的混合动力机车控制系统研究混合动力机车作为一种新型的环保型交通工具,受到了广泛关注。
与传统的内燃机驱动机车相比,混合动力机车可以减少对环境的污染,提高能源利用效率。
在混合动力机车的控制系统中,CAN总线技术起到了至关重要的作用。
本文将研究基于CAN总线的混合动力机车控制系统,并探讨其在提高机车性能和可靠性方面的应用。
首先,本文将分析CAN总线技术在机车控制系统中的优势。
CAN总线是一种高级别、面向对象的通信协议,具有高度可靠性、高带宽和低延迟的特点。
在混合动力机车控制系统中,CAN总线可以实现多个控制单元之间的高速数据交换和通信,提高系统的整体性能和响应速度。
其次,本文将讨论混合动力机车控制系统中,CAN总线的架构和通信协议。
在混合动力机车控制系统中,通常采用主-从的通信结构,其中一个中央控制器作为主节点,控制和监控整个系统的运行。
其他各个子控制单元作为从节点,负责执行不同的控制任务。
通过CAN总线,主节点可以与从节点进行数据的传输和通信,实现控制指令的下发和数据的采集与反馈。
接下来,本文将详细介绍混合动力机车控制系统中CAN总线在不同功能模块中的应用。
首先是动力系统控制模块,它负责管理混合动力机车的内燃机和电动机的运行,控制能量的传递和调度。
通过CAN总线,动力系统控制模块可以监控和调整发动机和电动机的工作状态,实现高效的能量转换和提高机车的动力性能。
其次是能量回收与储存系统控制模块,它主要负责管理混合动力机车中的能量回收与储存系统,如回收制动能量和电池管理系统。
通过CAN总线,能量回收与储存系统控制模块可以实时监测和控制能量的回收和储存过程,提高能源的利用效率和机车的经济性。
另外,本文将探讨CAN总线在车辆动力控制与驱动系统中的应用。
CAN总线可以实现与发动机控制单元、变速器控制单元和驱动电机控制单元之间的高速通信,实现动力系统的精确控制和协同工作,提高机车的性能和可靠性。
最后,本文将重点介绍CAN总线在故障诊断和维护方面的应用。
基于CAN总线的柴油机数据采集系统设计

2 2 数 据 采 集 模 块 .
Байду номын сангаас
F AS 芯片 , L H 可工 作在 2 5 . 与 单 片机 间通 . ~2 7V, 过 S 1 口连 接 。为 实 现 数 据 与采 集 时 间的 同 时 P 0接 记录 , 使用 DS 3 2时钟 芯 片产生 实 时时钟 , S 3 2 10 D 10 通过 RE S复 位 、/ 数 据 、 C K 串 行 时 钟 3个 口 Io SL
21 0 2年 2月
杨
薇, : 于C 等 基 AN 总 线 的柴 油 机 数 据 采 集 系 统设 计
部 电路 。由于 使 用 C AN 总线 通 信 , 时钟 频 率 的 对
要 求 比较 严 格 , 晶振 电路 选 用 2 . 1 2 1 84 MHz的 晶
以 对 历 史 数 据 进 行 分 析 。 采 用 1 MB t 的 6 ye AT 5 B 6 4 D 1 1作 为存 储 芯 片 , 芯 片是 串 行 接 口的 该
体 振荡 器 。系统 输入 电源为 2 为满 足 不 同信 号 4V, 调 理 电路 、 感 器 、 片机 供 电 以及 AD转 换外 部 电 传 单 压 基准 , 由专 门的 电源 管 理 模 块将 系统 输 入 电压 转 换 为稳 定 的 1 5V, . 和 2 5V, 外加 入热 5V, 3 3V . 另
柴 油 机工 作过 程 复 杂 , 其 运 转 过 程 中输 出 各 在 类参 数 , 些参 数在 不 同程 度 上 反 映 设 备 的 整 体 性 这 能 和工 作 状 态 。 目前 , 油 机 电控 系 统 E U 具 有 柴 C 采集 与 分析 柴油 机 主 要 运 行 参 数 的 功 能 , 在 柴 油 但 机 性能 测试 、 障诊 断及 工作 过 程 实 时 监 测 等 应 用 故 中, 还需 要 对辅 助 参 数 及 其他 信 号 进 行 采 集 , 因此 ,
基于CAN总线智能车辆转向系统数据采集系统

锚
R 中 E S E T n
L
I
单 片机下载 程 序 用 的;
BDM o u T是 当 应 用 程 序 为 BD M 调 试 器 程 序 时 ,用 作 BDM 调 试 器 输 出用 的 。
图1智能车辆转 向控制系统工作原理示意 图 由 于 智 能 车 辆 转 向控 制 系 统 靠 蓄 电池 提 供 能 量 .免 去 了液 压 装 置 . 用 电 动 机 直 接 来 提 供 助 力 , 向力 矩 大 小 由 利 转 ECU控 制 .提 高 汽 车 的 操 纵 灵 活 性 .只 有 在 车 辆 偏 离 时 才
nr t C mna n f an O “CIs o i m i{ mo & 。
械 转 向 机 构 , 生 相 应 的 转 向助 力 。其 工作 原 理 示 意 图 如 产
图1 示 : 所 B M 接 口 是 接 D
V CC
BDM 调 试 工 具 的 ,如 图 4所 示 。其 中BDM I N接
跟 新 信 息 。多通 道 数 据 采 集 的常 用 方 式 。
多通道 数据采 集一 般 是指 同时对 多路信 号进 行采样 .
图2 C AN总线 通 信 电路
并 把 采 样 信 号 按 一 定 格 式保 存 下 来 。目前 , 用 的 方 式 有 以 常
下 两种:
复位 电 路 使 用 低 电 压 复 位 芯 片 MC3 0 4。 用 专 门的 46 使 上 电复 位 电路 使 系 统 上 电 复 位 更 加 可 靠 。当然 也 可 以用 一 只
VCC
消 耗 能 量 . 以 . 于 本 系 统 的 应 用 能 够 节 约 燃 料 . 能 车 所 由 智
基于CAN总线的火车轮对数据采集系统
.
中’
,
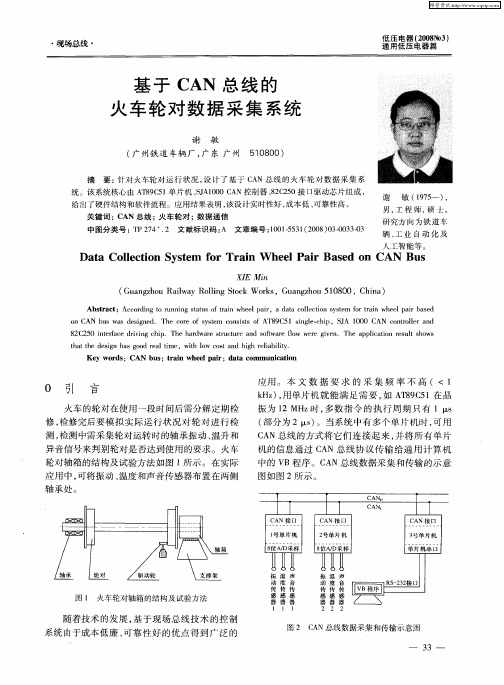
责接 收 12号 单 片机 的数 据 , 通过 R -3 、 并 S22接 口 方式将 数据 发 给 V B程序 。
o AN b swa e in d T e c r f s se c n it o 8 C i ge c i n C u s d s e . h o e o y t m o sss f AT 9 5 sn l — hp,S A 1 0 AN c n rl r a d g 1 J 0 0 C ot l n oe
0 引 言
火 车 的轮对 在使 用一 段 时 间后 需 分解 定期 检 修, 检修 完 后要模 拟 实 际运 行 状 况 对 轮 对 进 行 检
应 用 。 本 文 数 据 要 求 的 采 集 频 率 不 高 (< 1
k z , 单片 机 就 能 满 足 需 要 , A 8 C 1在 晶 H )用 如 T9 5 振 为 1 z , 数 指 令 的执 行 周 期 只有 1 s 2MH 时 多 ( 分为 2 s 。 当系统 中有 多个 单 片机 时 , 用 部 ) 可
振 温 声 动 度 音
图 1 火 车轮对轴箱的结构及试验方法
传 传 传 感 感 感
器 器 器
l l 1
振 动 传 感 器
Hale Waihona Puke 温 度 传 感 器声 音 传 感 器
2 2 2
随 着技术 的发 展 , 于现 场 总 线 技 术 的 控 制 基 系统 由于成本 低 廉 、 可靠 性 好 的优 点 得 到 广 泛 的
轴承 处 。
机 的信息通过 C N总线协议 传输 给通用计算机 A 中的 V B程 序 。C N总 线数据 采 集 和传输 的示 意 A
基于CAN总线的微型数据采集系统设计

基于 C A N总 线 的微 型 数 据 采 集 系统 设 计
De s i g n o f t h e Mi n i a t u r e Da t a Ac q u i s i t i o n Sy s t e m Ba s e d on CAN Bu s
中图分 类 号 :T P 3 9 1 文献 标志 码 :A
Abs t r a c t : Fo r v e h i c l e — mo u n t e d s y s t e m ,t h e d e ma nd s o n mi n i a t u r i z a t i o n a n d r e a l t i me pe r f o r ma n c e o f d a t a a c q u i s i t i o n mo d u l e a r e g e t t i ng i n c r e a s i n g l y hi g h .T o s o l v e t h i s p r o b l e m ,t h e d a t a a c q ui s i t i o n s y s t e m i s d e s i g n e d b y a d o p t i n g t h e S o C t y p e s i n g l e c h i p c o mp u t e r a n d CAN b u s
Ke y wo r ds : Ve hi c l e — mo u n t e d s y s t e m CAN b u s Da t a c o l l i s i o n Da t a a c qu i s i t i o n Re l i a bi l i的今 天 , 数据 采集 已经 发生
基于CAN总线的特种车辆状态数据采集系统
·30·兵工自动化Ordnance Industry Automation2021-0440(4)doi: 10.7690/bgzdh.2021.04.007基于CAN总线的特种车辆状态数据采集系统胡道畅,欧阳中辉,陈青华,樊辉锦(海军航空大学岸防兵学院,山东烟台 264001)摘要:针对海军特种车辆数据采集效率低、信息化程度不高等问题,设计一套基于CAN总线的特种车辆状态数据采集系统。
利用采集终端完成数据的采集和存储功能,通过车载CAN通信网络,采用监控平台对终端采集到的数据进行解析,实现对车辆运行状态数据的实时显示功能,并通过将系统接入某型装甲车辆CAN通信网络进行测试。
测试结果证明:该系统能实时监测和记录车辆运行状态信息,对部队信息化建设具有一定的参考价值。
关键词:STM32F103CBT6;CAN总线;数据采集终端;状态监控平台中图分类号:TP391 文献标志码:ASpecial Vehicle State Data Acquisition System Based on CAN BusHu Daochang, Ouyang Zhonghui, Chen Qinghua, Fan Huijin(College of Coast Defense, Navy Aviation University, Yantai 264001, China) Abstract: Aiming at the problems of low efficiency and low information level of Navy special vehicle data acquisition, a special vehicle state data acquisition system based on CAN bus is designed. The acquisition terminal is used to complete the data acquisition and storage functions. Through the vehicle CAN communication network, the monitoring platform is used to analyze the data collected by the terminal, so as to realize the real-time display function of the vehicle running state data. The system is connected to the CAN communication network of an armored vehicle for testing. The test results show that the system can carry out monitoring and making record of the vehicle running status information in real time, which has a certain reference value for the army information construction.Keywords: STM32F103CBT6; CAN bus; data acquisition terminal; status monitoring platform0引言随着海军转型建设的发展,承载地面突击、防空反导、岸基反舰、两栖作战等任务的特种车辆以其机动性能优越、火力覆盖范围广等独特优势大量列装,大大提升了部队战斗力,特种车辆的技术状态也成为直接影响各项作战、演习、演练任务的关键所在[1-5]。
基于CAN总线的数据采集节点的设计
( t n l yL b rtr rEe t ncMe srme t c n lg , rhUnv ri f ia Tay a , 3 0 Nai a a o aoyf lcr i o Ke o o au e n h oo y No iesyo n , iu n 0 0 5 Te t t Ch 1
o P 3 F 4 co o tolra dSAI 0 siu t td n MS 4 0 4 9 mir c n rl n J O 0 i l s ae .Beie,sv rlo r aaa q i t n n d scn b e l r s s e ea rmo ed t c us i o e a e d io
域 。在数据 采集 系统 中离不开传 感器 ,传统 的传感 器与上位机 的点对 点的模拟 通道连 接方式 , 抗干扰
能 力差 、精 度低 。本文 提 出 了一种基 于 C AN总 线的数据采集节 点的设计方案 ,将 传感器采集到 的 数据 以数字 量的形 式输 出 ,通过 C N网络 可方便 A
现 了数据采集系统的网络化 。
关键词: A C N总线 ;数据采集 ;传感器 ;SalO j OO
中 图分 类 号 : P 0 . T 3 21 文 献标 识 码 :A
D e i n f da a a quiii sg o t c ston node ba e o CAN s d n bus
网
是应 用最广泛 的现场总 线之一 ,与一般 的通
信总 线相 比 ,C N总线 的数据 通信 具有 突 出 的可 A 靠性 、实 时性 和灵 活性 。由于 C N 总线 的 自身特 A
基于CAN总线的电动汽车数字控制系统研究

O 引言电动汽车是集计算机技术、通信技术、电子技术、新材料技术等一体化的高科技产品,其结构复杂,有多种相互作用却又相对独立的部件,且车载环境较恶劣,有很强的干扰,用模拟量的控制可靠性不高。
先进高效的控制体系结构,可以使电动汽车各系统之间的数据交换满足简单迅速、可靠性高、抗干扰能力强、实时性好、系统错误检测和隔离能力强等要求。
本文采用了先进的计算机技术和CAN总线技术,集智能控制、信号采集、数据处理和通信于一体,控制实时性好,可实现整车控制智能化和多传感器信息的有效融合。
1 CAN总线的简介CAN(ControllerAreaNewtork)即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。
CAN总线是最初由德国Bosch公司在80年代初期,为了解决现代汽车中众多的控制与测试一起之间的数据交换而开发的一种串行数据通信协议,目的是通过较少的信号线将汽车上的各种电子设备通过网络连接起来,并提高数据在网络中传输的可靠性,CA N总线具有较强纠错能力,支持差分收发,因而适合高噪声环境,并具有较远的传输距离,特别适合于中小型分布式测控系统,目前己在工业自动化、建筑物环境控制、机床、医疗设备等领域得到广泛应用。
CAN总线具有以下几个重要特点:1)结构简单,只有两根线与外部相连,且内部含有错误探测和管理模块。
2)通信方式灵活。
可以多种方式工作,网络上任意一个节点均可在任意时刻主动的向网络上的其他节点发送信息,而不分主从。
3)可以点对点、点对多点及全局广播方式发送和接受数据。
4)网络上的节点信息可分成不同的优先级,可以满足不同的实时要求。
5)CAN通讯格式采用短帧格式,每帧字节数最多为8个,可满足通常工业领域中控制命令、工作状态和测试数据的一般要求。
同时,8个字节也不会占用总线时间过长,从而保证了通讯的实时性。
6)采用非破坏性总线仲裁技术。
当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响继续传输数据,这大大地节省了总线仲裁冲突时间,在网络负载很重的情况下也不会出现网络瘫痪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3 6卷
第 5期
航 空 计 算 技 术
A r n u ia o ui g T c n q e e o a t lC mp t e h i u c n
Vo . 6 No 5 I3 . S p20 e .0 6
20 0 6年 9月
采用 X 54 。X 54 … 是美 国 Xcr 司生产 的 E — 205 20 5 i 公 o E
度设定为 15 b s通讯介质采用双绞线或同轴 电缆。 2Kp, 节点数设为 6 4个 , 它们是一个数据采集工控机 、 一个 监控报警器 、 个智能表和 8 5 4 个开关量卡。
1 系统的框架设计及基本原 理
构建铁路机车数据平 台, 首先要改造传统 的检测 仪表。将微处理器置入传统 的检测仪表, 使它们各 自 都具有数字计算和数字通讯能力 ( 智能仪表 ) 。采用 可进行简单连接的双绞线或屏蔽线等作总线 , 多个 把
收稿 日期 :060 .4 20 -81 修 订 日期 :0 6 1・3 2 0 ・ i 0
摘 要 : 绍 了 基 于 C N 总 线 改 过 的 机 车 数 据 采 集 系统 。 采 用 内嵌 C N 控 制 器 的 微 处 理 器 介 A A
(8C9 ) P7 5 1 来改进传统模拟仪表 , 它们成 为具有相 互通讯能力 的智能仪表( 使 节点 ) 通过 C N总线 , A 和 上位机通讯 , 对各仪表 测量数 据采集 、 存储 、 分析和 管理 来监 测机车运行状 况 , 保证机 车的正常运 行 。具有记 录面广、 存储 容量 大 、 数据处理灵活等优点 , 有广泛的应用前景。
故障时, 还可 以及时 向司机报警 , 在机车库检时, 系统 还提供检修指导。
最 多节点 数可 达 10个 。本 机 车数 据平 台通 讯 速 1
接在收发 器 的 T D X 。下位 机 和上 位 机通 过 C N A H、 CN A L屏蔽双 绞线进 行双 向通信。总线终端 需跨 接 10 10 电阻以抑制信号反射 , 0 n~ 2 n 保证通信 可靠性。 双绞线连接各个模块 节点 , 形成多主控制 的局域 网。 为增强 C N总线 节点 的抗干扰能力。外部 复位 电路 A
口卡。T控机监 控系统软件采 D l i e h 7软件编 。 p
软件使用友好 , 人机对话界面实时显示 、 跟踪 、 监控列
车运 行状态 , 实现对 机 车实 时 在线 故障检 测 , 车 现 机
且提示列车司机机车运行 的状况 , 并把历 史数据存储 以备机车检修使用 。从而保证 r 机车的止常运行 。上 位机采用 D l i . 设计人机界面及管理数据 , e h 7O p 具有 人机界面友好 、 操作 简单 、 运行可靠 、 一定的应用价 有 值。由于篇幅问题, 本文只阐述下位机的软硬件设计 及各节点的通讯。
议通 讯 。数据 采集站 采用T 控 机 , 有 F 已的 C N接 带 1 A
器人、 数控机床 、 医疗器械及传感器等领域。并已被公 认为几种最有前途 的现场 总线之 一 A 。C N总线上的 节点一般采用单片机外加 C N控制 P i s 司推 hi 公 l p
换 。 网络 拓扑 图 ( 罔 1 , 用 总 线半 双 I串行 式通 见 )采
汛, 虽然该 结构信 息吞 吐量低 , 结构 简单 、 但 成本 低 、f H
靠性高。选用 C N总线连接各个 竹点 ( A 数据采集站 、
智 能表 、 监控器 等 ) 形 成 多 主局 域 网 。每 个 节点 模 块 , 都有 自己的 C U和 C N接 口电路 , P A 以便按 照 C N协 A
关键 词 : A 总 线 ;智 能仪 表 ;数 据 采 集 ; 8 C 9 CN P7 5 1
中图分类 号: P7 . T 242
文 献标识码 : A
文章编号 :6 l 5 X(0 6 0 - 2 - 17 - 4 20 )50 70 6 0 3
引言
CN A …属于总线式串行通信 网络 , 由于其独特的 设计 , 与一般的通信总线相 比, A C N总线的数据通信
基 于 C N总线 改进 的机 车 数 据 采 集 系统 A
魏 雅 , 一 丁学文 加 云 岗 ,
( . 西纺 织服 装 职业技 术学 院 自动化 系,陕西 成 阳 7 2 0 1陕 10 0;
2 西安工程大学 电信学院 , . 陕西 西安 704 ; . 10 8 3 西安工程大学 计算机学院,陕西 西安 704 ) 1 8 0
具有突 m的 可靠 性 、 时性 和灵 活 性 ; A 总 线 早 已 实 CN 成为 国际标准 j其应 用 范 围 也从 最 初 的 汽 车 电控 逐 , 步扩展 到过程 1业 、 械T 业 、 织机 械 、 用机 械 , 机 纺 农 机
测量仪表连接成网络 , 并按公开、 规范的通讯协议, 在 现场仪表和远程计算机之问实现数据传送 和信息交
的 P7 5 1集 成 了 C N 控 制 器 SA 00 ’ 8C9 A j 10 。 。本 文 ’ 将 详细介 绍基 于 C N总线 的机车 数据 采 集系 统 , A 重点 在 于 用 P7 5 1微 处 理 器 进 行 节点 的 设 计 和 应 用 。 8C 9 通 过对机 车 的牵 引 电机 、 力表 、 度表 、 压 温 电流 表 、 电压 表及柴 油机转 速 的上 下 限的设 置及 分析 , 时 记 录并 随
模 拟 量 模 块呻 模 拟 量 模 块
图 l 网络 拓 扑 结 构 图
作者简 介:魏 I
稚 (9 3 ) 女, 17 . , 陕两眉县人 , 讲师 , 硕士研究生 。 究方 为计算机应用 研
维普资讯
・
2 8・
航 空 计 算 技 术
第3 6卷 第 5期