Virtual Arch Type Reconfigurable Machine Tool Design
Switchtec PSX Gen4 程序可配置 PCIe 交换机家族说明书
SummaryThe Switchtec PSX Gen4 Programmable PCIe Switch Family comprises programmable and high-reliability switches that support up to 100 lanes, 52 ports, 26 virtual switch partitions, 48 Non-Transparent Bridges (NTBs), hot- and surprise-plug controllers for each port, advanced error containment, comprehensive diagnostics and debug capabilities, a wide breadth of I/O interfaces and an integrated MIPS processor.T ypical applications for the PSX family include PCIe SSD enclosures, Flash arrays, multi-host archi-tectures, high-density servers, blade servers, pooled storage/compute and applications that require customized, high-reliability PCIe switching.Switchtec TM PSX Gen 4 Programmable PCIe ® Switch FamilyPM41100, PM41084, PM41068, PM41052, PM41036, PM41028FeaturesHigh-Performance Non-Blocking Gen4 Switches• 100-lane, 84-lane, 68-lane, 52-lane, 36-lane and 28-lane variants• Ports bifurcate to x11/x2/x4/x8/x16 lanes • Up to 48 NTBs assignable to any port• Logical Non-Transparent (NT) interconnect allows for larger topologies• Supports 1+1 and N+1 failover mechanismsDMA Controller• High-performance, ultra-low latency DMA engineError Containment• Advanced Error Reporting (AER) on all ports• Downstream Port Containment (DPC) on all downstream ports • Completion Timeout Synthesis (CTS) to prevent an error state in an upstream host due to incomplete non-posted transactions• Upstream Error Containment (UEC), a programmable feature that prevents errors from propagating upstream • Hot- and surprise-plug controllers per port• GPIOs configurable for different cable/connector standardsDiagnostics and Debug• Real-time eye capture• External loopback capability• Errors, statistics and performance countersPCIe Interfaces• Passive, managed and optical cables• SFF-8644, SFF-8643, SFF-8639, OCuLink and other connectors1x1 natively on four lanesThe Microchip name and logo, the Microchip logo and PCIe are registered trademarks and Switchtec is a trademark of Microchip Technology Incorporated in the U.S.A. and other countries. All other trademarks mentioned herein are property of their respective companies.© 2020, Microchip Technology Incorporated. All Rights Reserved. 1/20 DS00003308AHighlights• High-reliability PCIe: robust error containment, hot- and surprise-plug controllers per port, end-to-end data integrity protection, high-quality, low-power SERDES• PSX Software Development Kit (SDK): enables customer-differentiated solutions in areas such as error containment and surprise-plug• Integrated enclosure management processor, I/O interfaces, and SDK for enclosure management firmware development • Comprehensive diagnostics and debugging: PCIe genera-tor and analyzer, per-port performance and error counters, multiple loopback modes and real-time eye capture• Significant power, cost and board space savings with sup -port for:• Up to 52 ports, 48 NTBs, and 26 virtual switch partitions • Flexible x11, x2, x4, x8, and x16 port bifurcation with no restrictions on configuring ports as either upstream or downstream, or on mapping ports to NTBs• NVMe-MI enclosure management:• Integrated NVMe controller• In-band management supporting SES and native NVMe enclosure management stack• Out-of-band management supporting MCTP through I 2C • Secure system solution with boot image authenticationPeripheral I/O Interfaces• Up to 11 Two-Wire Interfaces (TWIs) with SMBus support • Up to 4 SFF-8485-compliant SGPIO ports• 10/100 Ethernet MAC port (MII/RMII) (PSX 100x/84x/68xG4)• 16-bit parallel local bus interface with ECC protection • Up to 4 UARTs•JTAG and EJTAG interfaceHigh-Speed I/O• PCIe Gen4 16 GT/s• Supports PCIe-compliant link training and manual PHY configuration• Manual PHY configuration for opticalPower Management• Active State Power Management (ASPM)• Software-controlled power managementChipLink Diagnostic Tools• Extensive debug, diagnostics, configuration and analysis tools with an intuitive GUI• Access to configuration data, management capabilities and signal integrity analysis tools (such as real-time eye capture)Evaluation KitThe PM42100-KIT Switchtec Gen4 PCIe Switch Evaluation Kit is a device evaluation environment that supports multiple interfaces.Example Application1x1 natively on four lanesFor More Information。
阿里巴巴平头哥 RISC-V 处理器架构和玄铁 CPU IP 介绍说明书

扫码注册平头哥OCC 官网观看各类视频及课程阿里云开发者“藏经阁”海量电子手册免费下载平头哥芯片开放社区交流群扫码关注获取更多信息平头哥RISC-V 系列课程培训扫码登录在线学习目录RISC-V处理器架构 (5)1.RISC-V架构起源 (5)2.RISC-V架构发展 (5)3.RISC-V架构与X86、ARM在商业模式上的区别 (6)4.RISC-V架构现状和未来 (7)5.RISC-V处理器课程学习 (9)平头哥玄铁CPU IP (10)1.概述 (10)2.面向低功耗领域CPU (10)3.面向中高端服务器CPU (16)4.面向高性能领域CPU (23)5.玄铁CPU课程学习 (26)无剑平台 (27)1.无剑100开源SoC平台 (27)2.无剑600SoC平台 (28)平头哥RISC-V工具链 (34)1.RISC-V工具链简介 (34)2.剑池CDK开发工具 (37)3.玄铁CPU调试系统 (44)4.HHB (51)5.剑池CDK开发工具课程学习 (54)平头哥玄铁CPU系统 (55)1.YoC (55)2.Linux (56)3.Android (62)RISC-V玄铁系列开发板实践 (67)1.基于玄铁C906处理器的D1Dock Pro开发实践 (67)2.基于玄铁E906处理器的RVB2601开发实践 (82)RISC-V应用领域开发示例 (100)1.基于D1Dock Pro应用开发示例 (100)2.基于RVB2601应用开发示例 (106)RISC-V未来探索 (116)1.平头哥开源RISC-V系统处理器 (116)2.平头哥对RISC-V基金会贡献 (117)3.高校合作 (117)RISC-V处理器架构1.RISC-V架构起源RISC-V架构是一种开源的指令集架构。
最早是由美国伯克利大学的Krest教授及其研究团队提出的,当时提出的初衷是为了计算机/电子类方向的学生做课程实践服务的。
Creator和Vega Prime在数字城市规划中的应用

总第254期计算机与数字工程V01.38N o.12 2010年第12期C om put er&D i gi t a l E ngi ne er i ng154C r eat or和V ega Pr i m e在数字城市规划中的应用’李粉莉童小念(中南民族大学计算机科学学院武汉430074)摘要C r eat or和V ega Pr i m e的虚拟现实视景仿真平台具有快速处理复杂仿真事件的能力。
为了构建一个虚拟仿真漫游系统,阐述C reat or和V ega Pr i m e在数字城市规划设计中的应用,基于C r eator和V ega Pr i m e实施武汉光谷广场的视景仿真漫游。
实验结果表明。
虚拟现实技术能够将城市规划工作从传统的平面静态层次提升到立体的动态层次。
关键词数字城市规划;虚拟现实;视景仿真;C reat or;V ega Pr i m e中图分类号TP393A ppl i cat i on of C r eat or&V ega Pr i m e i n D i gi t al U r ba n Pl anni ngL i F e nl i T ong X i a on i an(Col l ege of C om p ut er S c i ence,Sout h-Cent r a l U n i ve r si t y f or N a t i onal i t i es,W uha n430074)A b s t r a ct T h e vi r t ual r eali t y vi s ual si m ul a t i on pl at f01Tn ba se d o n C r eat or&V ega Pr i m e ha s t he abi li t y t O pr oc ess c orn—pl exsi m ul a t i on ev ent s qui ckl y.I n or d er t O bui l d a vi r tual si m ul at i on r o a m i ng syst em,desc r i bi ng t he appl i c at i on of C r eat or& V ega Pri m e i n di git al urban desi gn,i m pl e m e nt i ng t he vi s ual si m ul at i on r o a m i ng of O p t i c s V a l l e y Pl a za W uhan bas ed o n C r ea—t or&V ega Pri m e.E xpe r i m e nt r esul t s ho w s t hat vi r t ual r eali t y c an t ak e t he l evel of urba n pl an ni n g abi li t y f romt he t ra dit i o n—a l f l at s ta t ic l evel r ai s ed t O t hree-di m ensi onal dynam i c l e vel.K e y W or ds digi t al urban pl a nni ng,vi r t u al r eal i t y,vi sual si m ul a t i on,Cre at or,V ega Pr i m eC I n N u n_-be r T P3931引言城市规划是指对城市的空间和实体发展进行预先的考虑,确定城市性质、规模和发展方向,以合理利用城市土地以及协调城市空间布局。
USB Type-C 规范1.2(中文版)

知识产权声明
THIS SPECIFICATION IS PROVIDED TO YOU “AS IS” WITH NO WARRANTIES WHATSOEVER, INCLUDING ANY WARRANTY OF MERCHANTABILITY, NON-INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE. THE AUTHORS OF THIS SPECIFICATION DISCLAIM ALL LIABILITY, INCLUDING LIABILITY FOR INFRINGEMENT OF ANY PROPRIETARY RIGHTS, RELATING TO USE OR IMPLEMENTATION OF INFORMATION IN THIS SPECIFICATION. THE PROVISION OF THIS SPECIFICATION TO YOU DOES NOT PROVIDE YOU WITH ANY LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS.
预发行行业审查公司提供反馈
Revision History.......................................................................................................................14
LIMITED COPYRIGHT LICENSE: The USB 3.0 Promoters grant a conditional copyright license under the copyrights embodied in the USB Type-C Cable and Connector Specification to use and reproduce the Specification for the sole purpose of, and solely to the extent necessary for, evaluating whether to implement the Specification in products that would comply with the specification.
RoomMatch 不对称阵列模块数据手册说明书

TECHNICAL DATA SHEETKey Features•All the benefits of the original 20 RoomMatch array module loudspeakers - Concert-quality sound quality for live music and outstanding spoken-word clarity with industry-leading seat-to-seat consistency •22 different horizontally asymmetrical coverage patterns - Improves sound quality by reducing side-wall reflections in many room shapes •Industry’s only large-format asymmetrical waveguides - Pattern control down to 800 Hz to improve vocal clarity and intelligibility •Asymmetrical patterns improve stereo soundstage effects –Particularly when used in long, narrow rooms •Simplifies installation for many room shapes - Provides consistent seat-to-seat coverage without the need to “yaw-in” array aimingProduct OverviewRoomMatch asymmetrical array modules add to existing RoomMatch full-range modules to provide 22 modules with horizontallyasymmetrical coverage patterns. For many room shapes, asymmetrical coverage patterns improve sound quality by reducing side-wall reflections without the need to "yaw in" array aiming. Additionally, asymmetrical coverage patterns provide enhanced stereo soundstage when used in left/right pairs, or true left/center/right systems, for many venue shapes.Technical SpecificationsSingle Module Performance Frequency Response (+/-3 dB)160 Hz - 16 kHz Frequency Range (-10 dB)55 Hz - 16 kHzRecommended High-Pass Protection Filter50 Hz with minimum 24-dB / octave (4th order) slope Nominal Coverage Pattern (H x V)228°+60° x 40° or 60°+28° x 40°550 Hz (acoustic, active, external DSP)Low FrequencyHigh Frequency 500 W (2000 W peak) 150 W (600 W peak) 4 Ω8 ΩLF No EQ LF With EQ HF No EQ HF With EQ 94 dB 93 dB 107 dB 100 dB peak Transducers Low Frequency 2 x Bose® LF10 high-excursion 10-inch woofers (3-inch voice coil)High Frequency 6 x Bose EMB2 extended-midrange compression driver (2-inch voice coil)Physical Enclosure Baltic nirch plywood, engineered plastics and steel frame Finish Two-part spray polyurethane coating on plywood, black Grille 19-gauge (1.0 mm) perforated steel, powder-coated finish, black Environmental Indoor use onlyConnectors Two (2) parallel-wired Neutrik® Speakon NL4 connectors Dimensions 24.0" H x 39.1" W x 23.6" D (610 mm H x 993 mm W x 598 mm D) Net Weight 124 lb (56.3 kg)Shipping Weight 180 lb (81.6 kg) - - approximate with wood pallet Product Code RoomMatch® 286040RoomMatch® 602840626425-2980626425-9280Footnotes:1Frequency response and range measured on-axis with passive crossover in an anechoic environment.2Left-of-center angle + right-of-center horizontal angles (stage view) x vertical angles (stage pairs reverse horizontal angles).3Bose extended-lifecycle test using pink noise filtered to meet IEC268-5, 6-dB crest factor, 500-hour full-power duration.4Maximum SPL calculated from sensitivity and power handling specifications, exclusive of power compression.TECHNICAL DATA SHEETMulti-Module Performance, LF SectionMulti-Module Vertical Beamwidth201001000100002000010100360Frequency (Hz)A n g l e (d e g r e e s )TECHNICAL DATA SHEETDirectivity Index and Q20100100010000200005 10 15 20 25 30Frequency (Hz)D i r e c t i v i t y I n d e x (d B )2860401 101001000QBeamwidth201001000100002000010100360Frequency (Hz)A n g l e (d e g r e e s )286040*Stage view perspective, from module centerline.For mirror, Horizontal Left and Right are reversed.Impedance2010010001000020000110100Frequency (Hz)I m p e d a n c e (O h m s)356040TECHNICAL DATA SHEETOn-Axis Response2010010001000020000-40-30-20-1001020Frequency (Hz)S P L (d B )286040Wiring DiagramTECHNICAL DATA SHEETMechanical DiagramsTECHNICAL DATA SHEETHorizontal Plots306090120150180210240270300330-30-24-18-12 -6 0663 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 06125 Hz Octave Band306090120150180210240270300330-30-24-18-12 -606250 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 06500 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 061000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6062000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 064000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 068000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -60616000 Hz Octave BandTECHNICAL DATA SHEETVertical Plots30 6090120150180210240270300330-30-24-18-12 -6 0663 Hz Octave Band30 6090120150180210240270300330-30-24-18-12 -6 0 6125 Hz Octave Band306090120150180210240270300330-30-24-18-12 -6 0 6250 Hz Octave Band30 6090120150180210240270300330-30-24-18-12 -6 06500 Hz Octave Band30 6090120150180210240270300330-30-24-18-12 -6 0 61000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -60 62000 Hz Octave Band30 6090120150180210240270300330-30-24-18-12 -6 064000 Hz Octave Band30 6090120150180210240270300330-30-24-18-12 -6 0 68000 Hz Octave Band306090120150180210240270300330-30-24-18-12 -60 616000 Hz Octave BandTECHNICAL DATA SHEETAll information subject to change without notice.® 2013 Bose CorporationAll trademarks are those of their respective owners.Architects’ and Engineers’SpecificationsThe 2-way, full-range array module loudspeaker shall contain six (6) 2-inch titanium-diaphragm compression drivers mounted to a continuous-arc diffraction-slot manifold. The manifold will provide acoustic summation that is free from significant peaks or dips in response, from 500 Hz to 16 kHz, and exit into a constant-directivity waveguide with effective pattern control to approximately 1 kHz. The low-frequency section shall contain two (2) 10-inch cone transducers with 3-inch voice coils, witheach woofer contained in a separate vented enclosure. The array module will require external, active digital signal processing for transducer crossover and frequency response equalization.The array module loudspeaker shall meet the followingperformance specifications: On-axis system frequency response shall be 60 Hz to 16 kHz (+/- 3 dB) with recommended crossover and active equalization. The low-frequency sensitivity shall be 93dB SPL in free field with 1 W input, and be capable of producing peak output of 126 dB SPL on axis at 1 meter, with recommended equalization. The high-frequency sensitivity shall be 100 dB SPL in free field with 1 W input, and be capable of producing peak output of 128 dB SPL on axis at 1 meter, with recommended equalization. The low-frequency section shall have a long-term power handling rating of 500 W and a nominal input impedance of 4 ohms. The high-frequency section shall have a long-term power handling rating of 150 W and a nominal input impedance of 8 ohms. Power handling will be rated using IEC 268-5 pink noise, 6-dB crest factor, for 100 hours, with recommended EQ.The nominal coverage pattern shall be 28°+60° horizontal x 40°vertical or 60° +28° horizontal x 40° vertical as required.The array module loudspeaker shall be constructed of 11-ply Baltic birch plywood, protected by a polyurethane coating, for top and bottom waveguide sections, engineered-plastic composites for the woofer enclosures, and steel spar beams connecting the integral side-plate steel rigging hardware. The rigging hardware shall support up to 8 similar array module loudspeakers with a 10:1 Safety Factor. The woofer and waveguide sections will be protected by separate 19-gauge (1.0 mm) perforated steelgrilles with powder-coated finish. Input connectors shall be two (2)parallel-wired Neutrik® NL4 Speakon® connectors. The finish will be black (paintable).Loudspeaker dimensions shall be 24.0 x 39.1 x 23.6 in (610 x 993x 598 mm) and net weight shall be 123 lb. (55.8 kg).The 2-way, full-range array module loudspeaker shall be the Bose® RoomMatch® RM286040 or RM602840 as required.Additional Notes•Environment: Measured at 10 m. Responses are time-windowed and processed to eliminate room effects,approximating an anechoic environment •Beamwidth: 1/3 octave band smoothed beamwidth of single module measured at 10 m. Angle determined as -6dB point from the peak •On-Axis Response: 1/10 octave band smoothed response with recommended active EQ •Horizontal/Vertical Plots: 1/3 octave band smoothed polar responses with recommended active EQ applied to the module •Multi-Module Vertical Beamwidth: 1/3 octave bandsmoothed beamwidth of an array simulated in the far field.Angle determined as -6dB point from the peak •Array LF Sensitivity: On axis SPL of an array with 1W input for the entire array LF section. Simulated using Modeler® software at 16 m and referenced to 1 m •Maximum Array SPL @ 1 m: Maximum SPL calculated from sensitivity and power handling specifications,exclusive of power compression。
智慧地铁-车控室IBP盘性能提升设计
智慧地铁-车控室IBP盘性能提升设计我们需要对车控室IBP盘的性能进行分析。
IBP盘,即“Intelligent Braking Performance”,是一种智能化的制动性能盘,可以自动感知车辆的制动需求并做出相应的调整。
目前市面上已经有一些IBP盘产品,但是它们的性能还有待提高。
在当前地铁运行环境下,IBP盘应该具备更快的响应速度、更准确的制动力调节以及更稳定的性能表现。
需要对现有的IBP盘产品进行性能分析,找出其中的不足之处,并加以改进。
针对现有IBP盘的不足之处,进行性能提升设计。
在设计新的IBP盘产品时,应该考虑到地铁列车的运行特点和制动需求,结合先进的制动技术和智能控制算法,打造更稳定、更高效的IBP盘产品。
可以考虑在盘片材料、制动控制系统以及传感器技术等方面进行创新,以实现更快速、更精准的制动响应。
还可以引入自适应控制策略和智能学习算法,让IBP盘能够根据不同的运行环境和车辆状态进行自主调节,以确保车辆的制动性能始终处于最佳状态。
还需要对新设计的IBP盘产品进行全面的性能测试。
在设计出新的IBP盘产品之后,需要对其进行真实场景下的性能测试,以验证其真实的制动性能和稳定性。
通过模拟不同的运行环境和紧急制动情况,检验IBP盘在各种情况下的制动性能表现,确保其能够满足地铁列车的实际运行需求。
将新设计的IBP盘产品应用到地铁列车制动系统中,并进行长期的运行监测。
一旦新设计的IBP盘产品通过了性能测试并投入使用,需要对其进行长期的运行监测和数据分析,以确保其在实际运行中的稳定性和可靠性。
并根据实际的运行数据,及时优化和调整IBP盘的控制策略,使其能够不断适应不断变化的运行环境和需求,保障地铁列车的安全和稳定运行。
通过对车控室IBP盘性能的提升设计,可以有效提高地铁列车的制动性能和安全性。
通过引入先进的技术和智能化的控制策略,实现更快速、更精准的制动响应,保障地铁列车的安全运行。
还可以根据实际运行数据进行不断调整和优化,提升IBP盘产品的可靠性和稳定性,为城市地铁运行提供更加稳定、高效的保障。
Cadence针对Palladium Z1仿真平台发布VirtualBridge适配器

光 纤 电信 部 署 的 相 干 光 系 统 所 需 的偏 置 范 围 。两 款 I C集 成 了广 泛 的分 立 元 件 以 提 供 所 需 的 电压 范 围 和 其 他 系 统 功能 , 其 面 积 非 常 小 。这 些 数 模 转 换 器 非 常 适 合 实 现 光模 块和光 电转 换功能 , 例如偏 置 控制 , 包 括 Ma c h—Z e h n d e r 调制器偏置控制 。
工 程 师 为 DC到 1 0 0 GHz的 各 种 应 用 开 发 完 整 信 号 链 解
过 增加1 二 业以太网将现有 的非 网络设计 ( 如 电机 驱 动 器 ) 转 换 为 网 络 系 统 。与 只 支 持 一 个 单 一 工 业 以太 网 标 准 的 专 用 集 成 电路 ( AS I C) 不 同的是 , AMI C 1 1 0 S o C可 编 程 实 时单元( P RU —I C S S ) 支 持多 种 不 同的协 议 , 包括 E t h e r —
TI 新推 出的 S i t a r a AMI C I 1 0 S o C可 帮 助 开 发 人 员 通
A DI与 X—Mi c r o wa v e合 作 简 化 射 频 、 微 波 和 毫 米 波 设 计
ADI 公 司 宣 布 与 X—Mi c r o wa v e LL C —— 一 家 领 先 的
T I Ga N功 率设 计 可 高效 驱 动 2 0 0 V 交 流 伺 服 驱 动 器 和 机 器 人
德州仪器( TI ) 推 出一项 创新 的三相 氮化 镓 ( Ga N) 逆
变 器 参考 设 计 , 可帮助工程师构建 2 0 0 V、 2 k W 交 流 伺 服
基于RISC-V参数化超标量处理器的优化设计
基于RISC-V参数化超标量处理器的优化设计
刘有耀;潘宇晨
【期刊名称】《计算机工程与应用》
【年(卷),期】2022(58)5
【摘要】为解决嵌入式领域对处理器不同性能面积的需求,以及对重排序缓冲区阻塞,保留站派遣长短周期指令时导致的吞吐率不平衡及堵塞问题,设计并优化了一种简便配置的参数化流水线超标量处理器。
通过定制化流水线中的分支预测,缓存与运算单元,将RISC-V指令划分5大类处理,对不同周期的执行单元采用级联与并行的混合分布方式,将充当排序缓存中的指令再派遣,达到指令暂存和分类执行的目的,使一条不定周期指令可以携带多条单周期指令提交。
缓存之间以直连方式进行通信,以避免复杂的公共数据总线以降低时序损耗。
实验结果表明,该处理器可以通过配置达到IPC为0.746~1.476之间的性能,平均比同类型处理器IPC提升132.4%。
【总页数】9页(P66-74)
【作者】刘有耀;潘宇晨
【作者单位】西安邮电大学电子工程学院
【正文语种】中文
【中图分类】TP332
【相关文献】
1.基于 MIPS 指令集的超标量和超长指令字混合架构处理器设计
2.基于32位超标量处理器的保留站设计
3.基于RISC-V指令集的超标量处理器设计
4.DMR:兼容
RISC-V架构的乱序超标量通用处理器核5.32位RISC-V处理器中乘法器的优化设计
因版权原因,仅展示原文概要,查看原文内容请购买。
NVIDIA BOOTH Sl3905 商品展示说明书

AccElERATE YOuR cREATiviTYWiTH NviDiA.BOOTH Sl3905nVidiA At nAb 2013get faster Animation, simulation, and Rendering.featuring: NVIDIA® Maximus™ technology, including the latest generation of NVIDIA Quadro® GPUs with the powerful newNVIDIA Kepler™ architecture, running:> MAXON CINEMA 4D, Jawset TurbulenceFD, and Dell T7600showcasing particle simulation for 3D animation> OTOY Octane Render and HP Z820 showcasing interactive,globally illuminated renderingfor: Animators and 3D and visual-effect artists to create,simulate, and render simultaneously without interrupting their creative workflowAccelerate Color grading.featuring: DaVinci Resolve running on Mac Pro, powered byNVIDIA Quadro K5000 for Macfor: Colorists, video producers, and digital filmmakers whowant to do state-of-the-art color grading on a MacCreate Video productions with Even greater speed.featuring: Adobe® Premiere® Pro Next with an improved GPU-accelerated Mercury Playback Engine, powered by an NVIDIA Kepler-class of Quadro for mobile workstations.for: Video editors, digital filmmakers and broadcasters whoneed real-time performance to enable creative workflows and fast production turnaroundget Quadro performance on windows, mac, orlinux desktops.featuring: the NVIDIA GRID™ Visual Computing Appliance(VCA). Brand new for NAB 2013, the NVIDIA GRID VCA enablesworkgroups to get the full benefits of top-of-the-line NVIDIAGPU acceleration on their Windows, Mac, or Linux systems. The GRID VCA combines the benefits of remoting, virtualization, and Quadro reliability and performance in a turnkey package. At the booth, NVIDIA will feature a technology demonstration of theGRID VCA running:> Adobe® After Effects®Next and Adobe® Photoshop® CS6 on aLinux system, enabling unprecedented creative power andinteractivity when combined with the power of NVIDIA GPUs.> Autodesk 3ds Max 2014 with full GPU acceleration on aMacBook Pro for 3D modeling, animation, visual effects, andrendering to meet the technology demands of today’smodern pipelines> Autodesk Maya 2014, 3D animation software that offers next-generation display technology, accelerated modelingworkflows, robust systems for handling complex data, andinspiring creative toolsetsfor: Broadcasters, post houses, ad agencies, filmmakers,visual-effects artists, motion-graphic artists, and any media-content creator who wants to deliver GPU-accelerated creative and design applications on demandprovide next-generation Content Experiences.featuring: NVIDIA SHIELD,™ a gaming portable designed forgamers who yearn to play when, where, and how they want. With the advanced processing power of NVIDIA Tegra® 4, a full-sizegame controller, breakthrough Wi-Fi technology, and stunning HD video and audio, SHIELD redefines what gaming can be.for: Content creators and content distributors who areinterested in next-generation platforms for gaming and movieson-AiR gRApHiCsPARTNER BOOTH # AccuWeather SL6816 Broadcast Pix SL6324 ChyronHego SL1010 Compix Media SL5705 Harris Broadcast N2503 Miranda Technologies N2531 NewTek SL4610 Orad Hi-Tec Systems SL5709 Pixel Power N2034 Ross Video N3808 Vizrt SL3305 WASP3D SL6328 WSI/Weather Central SL1710 Editing, Compositing, AnimAtion, REndERing, EffECts, And ColoR mAnAgEmEntPARTNER BOOTH # Adobe Systems SL3910 ASSIMILATE SL12705 Autodesk SL3316 Avid SU902 Binocle C12049 Blackmagic Design SL218 Boris FX SL4327 Brainstorm Multimedia SL10621 Cinnafilm SL9605 (HP) Digital Vision SL14518 EditShare SL9010Editing, Compositing, AnimAtion, REndERing,EffECts, And ColoR mAnAgEmEnt (ContinuEd)PARTNER BOOTH #FilmLight SL3928 GenArts SL4224Grass Valley SL206Lightcraft Technology SL12516Marquise Technologies SL12508Maxon Computer Inc. SL5316MTI Film SL15510NewTek SL4610Quantel SL2109Red Giant SL3728SGO SL10321Sony (Vegas™ Pro) C11001The Foundry SL3324EnCoding, tRAnsCoding, And VidEopRoCEssingPARTNER BOOTH #AmberFin SU8505 Cinegy SL11112Digimetrics N3833Elemental Technologies SU2724Interra Systems SL8006Root6 Technology SL7428Sorenson Media SU6806Telestream SL2605For more information on NVIDIA and its partners, visit /quadro.© 2013 NVIDIA Corporation. All rights reserved. All company and product names are trademarks or registered trademarks of the respective owners with which theyare associated. VidEo i/oPARTNER BOOTH #AJA Video SL3816BlackMagic Design SL218Bluefish444 SL9721Deltacast SL11516DVS, a Rohde & Schwarz company SL6316Matrox Electronic Systems SL4616systEm pRoVidER And HARdwARE pARtnERs PARTNERBOOTH #ARRIC4337Canon USAC4325Hewlett-PackardSL9605RED Digital CinemaSL1516Sony ElectronicsC11001Supermicro SL14510。
纹理物体缺陷的视觉检测算法研究--优秀毕业论文

摘 要
在竞争激烈的工业自动化生产过程中,机器视觉对产品质量的把关起着举足 轻重的作用,机器视觉在缺陷检测技术方面的应用也逐渐普遍起来。与常规的检 测技术相比,自动化的视觉检测系统更加经济、快捷、高效与 安全。纹理物体在 工业生产中广泛存在,像用于半导体装配和封装底板和发光二极管,现代 化电子 系统中的印制电路板,以及纺织行业中的布匹和织物等都可认为是含有纹理特征 的物体。本论文主要致力于纹理物体的缺陷检测技术研究,为纹理物体的自动化 检测提供高效而可靠的检测算法。 纹理是描述图像内容的重要特征,纹理分析也已经被成功的应用与纹理分割 和纹理分类当中。本研究提出了一种基于纹理分析技术和参考比较方式的缺陷检 测算法。这种算法能容忍物体变形引起的图像配准误差,对纹理的影响也具有鲁 棒性。本算法旨在为检测出的缺陷区域提供丰富而重要的物理意义,如缺陷区域 的大小、形状、亮度对比度及空间分布等。同时,在参考图像可行的情况下,本 算法可用于同质纹理物体和非同质纹理物体的检测,对非纹理物体 的检测也可取 得不错的效果。 在整个检测过程中,我们采用了可调控金字塔的纹理分析和重构技术。与传 统的小波纹理分析技术不同,我们在小波域中加入处理物体变形和纹理影响的容 忍度控制算法,来实现容忍物体变形和对纹理影响鲁棒的目的。最后可调控金字 塔的重构保证了缺陷区域物理意义恢复的准确性。实验阶段,我们检测了一系列 具有实际应用价值的图像。实验结果表明 本文提出的纹理物体缺陷检测算法具有 高效性和易于实现性。 关键字: 缺陷检测;纹理;物体变形;可调控金字塔;重构
Keywords: defect detection, texture, object distortion, steerable pyramid, reconstruction
II
基于Vis-Mockup的虚拟制造技术在工程机械产品开发中的应用

关键词: 虚拟制造; Vis-Mockup; 工程机械; 虚拟验证
中图分类号: TH164
文献标志码: B
文章编号: 1001-9677(2021)013-0162-04
Application of Virtual Manufacturing Technology in Product
环节, 在不消耗或少消耗实际生产资源的情况下, 实现最优结
果, 达到缩短周期、 降低成本、 提高效益的目的 [1] 。 上汽通用
五菱汽车股份有限公司就在整车开发过程中使用 Vis - Mockup
进行干涉检查, 通过软件做干涉检查, 具有使用简单、 计算高
效、 可靠性高等优点 [2] 。 艾尔希庆华汽车有限公司使用 Vis Mockup 中人机工程模块 Classic Jack, 分析在较封闭狭窄的农用
根据虚拟验证结果, 对加油口的设计提出了改进建议, 见
图 9。 红色部分为新油口设计方案, 之后对改进后的油口, 进
行虚拟验证, 结果明显好于前者。
尺寸
D
I
A
图 9 改进油口设计
Fig. 9 Improved port design
C
B
表 1 测量结果
Table 1 Measurement results
平台项目( 苏教职函[2019]26 号) 。
作者简介: 彭广盼(1987-) , 女, 硕士, 讲师, 现主要从事智能制造, VR 虚拟现实技术的研究和职业教育工作。
∗
第 49 卷第 13 期
彭广盼: 基于 Vis-Mockup 的虚拟制造技术在工程机械产品开发中的应用
PR3用户手册
企业标准:Q/OLLA 184-2008
i
HCC PR3 打印机使用手册
目录
第一章 打印机的安装............................................................................................................ 1-1 拆卸打印机包装 ....................................................................................................................... 1-1 打印机配件 .............................................................................................................................. 1-2
第五章 打印机设置 ................................................................................................................ 5-1 进入打印机设置模式 ................................................................................................................ 5-1 打印自检页 .............................................................................................................................. 5-1 打印设置表 .............................................................................................................................. 5-4 填写打印设置页 ....................................................................................................................... 5-5
ARRIS CAS虚拟化技术白皮书说明书
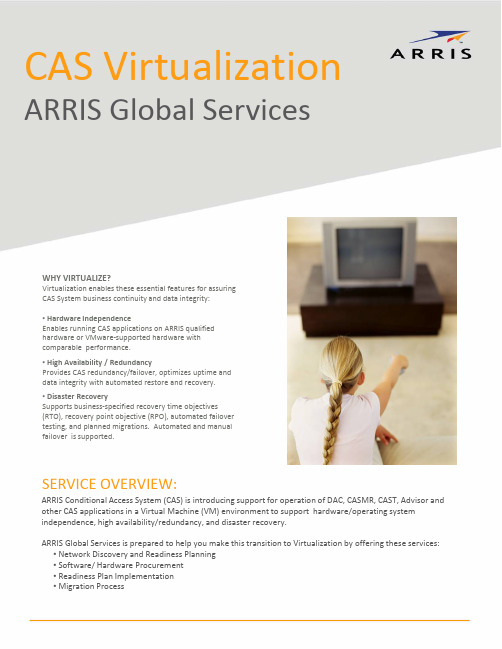
CAS VirtualizationARRIS Global ServicesARRIS Conditional Access System (CAS) is introducing support for operation of DAC, CASMR, CAST, Advisor and other CAS applications in a Virtual Machine (VM) environment to support hardware/operating system independence, high availability/redundancy, and disaster recovery.ARRIS Global Services is prepared to help you make this transition to Virtualization by offering these services: • Network Discovery and Readiness Planning • Software/ Hardware Procurement • Readiness Plan Implementation • Migration ProcessSERVICE OVERVIEW:WHY VIRTUALIZE?Virtualization enables these essential features for assuring CAS System business continuity and data integrity:• Hardware IndependenceEnables running CAS applications on ARRIS qualified hardware or VMware-supported hardware with comparable performance.• High Availability / RedundancyProvides CAS redundancy/failover, optimizes uptime and data integrity with automated restore and recovery. • Disaster RecoverySupports business-specified recovery time objectives (RTO), recovery point objective (RPO), automated failover testing, and planned migrations. Automated and manual failover is supported.CAS Virtualization ARRIS Global ServicesHORIZONTAL IMAGE ARRIS Global Services ensures your transition to virtualized CAS environment is done with minimal impact to your operations and customer population, allowing you to enjoy the advantages of hardware independence, high availability, hardware consolidation and disaster recovery. Our expert assistance allows you to workthrough the migration to a virtualized environment more quickly while allowing your own staff to focus on day to day operations.Network Discovery and Readiness Plan Creation•Collect critical data points on network •Review data collected•Assess existing architecture, backup/recovery process •Develop Network Plan and architecture •Create BOM, Services List, Action list•Develop proposal for High Availability, Disaster Recovery •Deliver Proposal and Readiness PlanSoftware/ Hardware Procurement•ARRIS procures hardware and software through industry leading 3rd party vendor partners (VMware®, HP®) to support end-to-end virtualization requirements. Virtualization Readiness Implementation •Basic Service•Validate network is ready for virtualization•Install new equipment (server/SAN) and software •Create Virtual Machine for CAS installation •Custom Service•Implement network changes•Implement other changes from the action list •Collect critical data points on network Migration Process•Load DAC software on previously created Virtual Machine •Execute the migration process•Validate the installation and system functionality •Release to productionSERVICE DESCRIPTION©ARRIS Enterprises, Inc. 2014 All rights reserved. No part of this publication may be reproduced in any form or by any means or used to make any derivative work (such as translation, transformation, or adaptation) without written permission from ARRIS Enterprises, Inc. (“ARRIS”). ARRIS reserves the right to revise this publication and to make changes in content from time to time without obligation on the part of ARRIS to provide notification of such revision or change. ARRIS and the ARRIS logo are all trademarks of ARRIS Enterprises, Inc. Other trademarks and trade names may be used in this document to refer to either the entities claiming the marks and the names of their products. ARRIS disclaims proprietary interest in the marks and names of others. VMware, vCenter, and vSphere are registered trademarks of VMware. HP, Store Virtual are registered trademarks of Hewlett-Packard.365-095-27333 x.1 11/2014IMPLEMENTATION EXAMPLEDAC6000 High Availability with Disaster Recovery Phase 1 - Site Preparation•Upgrade CAS hardware to support current software •Replace KLS and other HE components as needed•Upgrade DAC software to current release in native mode •Upgrade software from native to VM with HA •Upgrade to Disaster Recovery•Upgrade CSS/RADD software to current release – nativePhase 2- CAS Application – Native Mode •Upgrade CAS and install SAN servers •Install HP®StoreVirtual® on SAN servers •Upgrade PC to run VMware® vSphere®•Upgrade DAC software to current release – nativePhase 3 - High Availability•Implement N+1 backup DACs per site •Match the current configuration•Install VMware® vCenter® on the CAS hardware •Upgrade DAC apps from native mode to VM mode•Set up VMs so that all fail over to the backup CAS serverPhase 4 – Disaster Recovery•Implement/configure cold backup CAS/KLSs • Uses HP® StoreVirtual® snapshot feature • Uses SANs installed for backup DACs•Confirm remote cold KLS3000 is online/in sync with DAC •Implement failover mechanismORDERING INFORMATIONPart NumberDescription596226-001-00 CAS Virtualization Network Discovery and Readiness Plan Creation 596227-001-00 CAS Virtualization Readiness Implementation476666-043-00CAS Virtualization Migration ProcessNote: Specifications are subject to change without notice.。
可编程片上系统芯片SOPC

利用Slice 的ORCY 级联形成 和项众多 的组合函 数
利用Slice的MUXCY形成宽输入与门
18-Kbit可选RAM模块
Virtex-II器件集成了多个容量为18Kbit的可选
择RAM模块,每个RAM模块上有两个独立的数 据端口,分别由两组独立的时钟和控制信号控制, 同步存取同一个存储单元区域。每个端口的控制 信号功能是相同的,这些控制信号由时钟CLK、 时钟许可EN、写许可WE、置位/复位SSR和地址 线组成。 18Kbit 的 RAM 有 多 种 配 置 形 成 , 包 括 单 口 RAM和双口RAM,以及各种 不同的数据字长,包括8K×2bit、4K×4bit、 1K×18bit和512×36bit,以支持各种字长的数字 系统。
Virtex-II系列FPGA的结构和性能
Virtex-II系列FPGA是一种大容量、高性能的新 一代现场可编程门阵列平台器件。 Virtex-II系列FPGA的主要性能如下: 支持IP核设计实现,支持基于8位嵌入式处理器 软 核 PicoBlaze 和 32 位 嵌 入 式 处 理 器 软 核 MicroBlaze的片上系统设计实现。逻辑资源密度: 40K-10M PLD门;内部时钟:420MHz; I/O数 据传送速率:840Mb/S。 18Kbit的可选RAM模块可构成3M比特双口 RAM;最高容量为1.5M比特的分布式RAM资源。 与外部存储器的高性能接口 。
输入输出模块
Virtex-II的输入输出模块IOB是高性能的IOB, 每4个 IOB连到一个开关矩阵,4个IOB分成2组,可以构成4 个单端输入/输出或者2个双端差分输入/输出。
单端输入/输出 支持19种I/O标 准,双端差分 输入输出支持 8种I/O标准。
NVIDIA ConnectX-6DX智能网络接口卡数据手册说明书

NVIDIA CONNECTX-6DX ETHERNET SMARTNIC | DATASHEET | OCT21 | 1† For illustration only. Actual products may vary.Advanced Networking and Security for the Most Demanding Cloud and Data Center WorkloadsNVIDIA ® ConnectX ®-6 Dx is a highly secure and advanced smart network interface card (SmartNIC) that accelerates mission-critical cloud and data center applications, including security, virtualization, SDN/NFV, big data, machine learning, and storage. ConnectX-6 Dx provides up to two ports of 100Gb/s or a single port of 200Gb/sEthernet connectivity and is powered by 50Gb/s (PAM4) or 25/10 Gb/s (NRZ) SerDes technology.ConnectX-6 Dx features virtual switch (vSwitch) and virtual router (vRouter) hardware accelerations delivering orders-of-magnitude higher performance than software-based solutions. ConnectX-6 Dx supports a choice of single-root I/O virtualization (SR-IOV) and VirtIO in hardware, enabling customers to best address their application needs. By offloading cloud networking workloads, ConnectX-6 Dx frees up CPU cores for business applications while reducing total cost-of-ownership.In an era where data privacy is key, ConnectX-6 Dx provides built-in inline encryption/decryption, stateful packet filtering, and other capabilities, bringing advanced security down to every node with unprecedented performance and scalability. Built on the solid foundation of NVIDIA’s ConnectX line of SmartNICs, ConnectX-6 Dx offers best-in-class RDMA over Converged Ethernet (RoCE) capabilities, enabling scalable, resilient, and easy-to-deploy RoCE solutions. For data storage, ConnectX-6 Dx optimizes a suite of storage accelerations, bringing NVMe-oF target and initiator offloads.SOLUTIONS>Cloud-native, web 2.0, hyperscale >Enterprise data centers >Cybersecurity >Big data analytics>Scale-out compute and storage infrastructure>Telco and network function virtualization (NFV) >Cloud storage>Machine learning and AI >Media and entertainmentPRODUCT SPECIFICATIONSMaximum total bandwidth200Gb/sSupported Ethernet speeds10/25/40/50/100/ 200GbE Number of network ports1/2Network interface technologies NRZ/PAM4 Host interfacePCIe Gen4.0 x16, with NVIDIA Multi-Host ™ technology DPDK message rate Up to 215Mpps Platform securityHardware root-of-trust and secure firmware update Form factors PCIe HHHL, OCP2, OCP3.0 SFF Network interfacesSFP+, QSFP+, DSFPPCIe x16 HHHL Card †OCP 3.0 Small Form Factor †OCP 2.0 Form Factor†DATASHEETNVIDIA CONNECTX-6 DXEthernet SmartNICNetwork Interface>Dual ports of 10/25/40/50/100 GbE, or a single port of 200GbEHost Interface>16 lanes of PCIe Gen4, compatible with PCIe Gen2/Gen3>Integrated PCI switch>NVIDIA Multi-Host and NVIDIA Socket Direct™Virtualization/Cloud Native>SR-IOV and VirtIO acceleration>Up to 1K virtual functions per port>8 physical functions>Support for tunneling>Encap/decap of VXLAN, NVGRE, Geneve,and more>Stateless offloads for overlay tunnels NVIDIA ASAP2 Accelerated Switching & Packet Processing>SDN acceleration for:>Bare metal>Virtualization>Containers>Full hardware offload for OVS data plane>Flow update through RTE_Flow orTC_Flower>Flex-parser: user-defined classification>Hardware offload for:>Connection tracking (Layer 4 firewall)>NAT>Header rewrite>Mirroring>Sampling>Flow aging>Hierarchical QoS>Flow-based statistics Cybersecurity>Inline hardware IPsec encryption anddecryption>AES-GCM 128/256-bit key>RoCE over IPsec>Inline hardware TLS encryption anddecryption>AES-GCM 128/256-bit key>Data-at-rest AES-XTS encryption anddecryption>AES-XTS 256/512-bit key>Platform security>Hardware root-of-trust>Secure firmware updateStateless Offloads>TCP/UDP/IP stateless offload>LSO, LRO, checksum offload>Receive side scaling (RSS) also on encapsulatedpacket>Transmit side scaling (TSS)>VLAN and MPLS tag insertion/stripping>Receive flow steeringStorage Offloads>Block-level encryption: XTS-AES 256/512-bit key>NVMe over Fabrics offloads for target machine>T10 DIF signature handover operation at wirespeed, for ingress and egress traffic>Storage protocols: SRP, iSER, NFS RDMA,SMB Direct, NVMe-oFAdvanced Timing and Synchronization>Advanced PTP>IEEE 1588v2 (any profile)>PTP hardware clock (PHC) (UTC format)>Nanosecond-level accuracy>Line rate hardware timestamp (UTCformat)>PPS in and configurable PPS out>Time-triggered scheduling>PTP-based packet pacing>Time-based SDN acceleration (ASAP2)>Time-sensitive networking (TSN)>Dedicated precision timing card optionRDMA over Converged Ethernet(RoCE)>RoCE v1/v2>Zero-touch RoCE: no ECN, no PFC>RoCE over overlay networks>Selective repeat>Programmable congestion control interface>GPUDirect®Management and Control>NC-SI, MCTP over SMBus and MCTP overPCIe—Baseboard Management Controllerinterface, NCSI over RBT in Open ComputeProject (OCP) 2.0/3.0 cards>PLDM for Monitor and Control DSP0248>PLDM for Firmware Update DSP0267>I2C interface for device control andconfigurationRemote Boot>Remote boot over Ethernet>Remote boot over iSCSI>UEFI and PXE support for x86 and ArmserversFeatures(*)Ordering InformationFor NVIDIA ordering information, please contact your NVIDIA sales representative or visit the online ConnectX-6 Dx user manuals: PCIe HHHL form factor,OCP 3.0 form factor and OCP 2.0 form factor.*This section describes hardware features and capabilities.Please refer to the driver and firmware release notes for feature availability.。
PCV-2V压力释放阀,直接操作手动可调说明书

w e e n g i n e e r y o u r p r o g r e s sTable of Contents1 Product Details .....................................................................................................................................................................................2 1.1 Application ............................................................................................................................................................................................. 2 1.2 Recommended Installation .................................................................................................................................................................... 2 2 Function ................................................................................................................................................................................................ 2 2.1 Features ................................................................................................................................................................................................. 23 Technical Data ...................................................................................................................................................................................... 34 Ordering Information ........................................................................................................................................................................... 3 4.1 Type Code ............................................................................................................................................................................................. 3 4.2Versions currently available (3)5 Description of Characterisics in Accordance with Type Code ........................................................................................................ 4 5.1 Characteristic 1: Variant DSU ................................................................................................................................................................ 4 5.2 Characteristic 2: Port / Case: Variant CA - Cartridge ............................................................................................................................. 4 5.3 Characteristic 3: input flow rate .............................................................................................................................................................. 4 5.4 Characteristic 4: Max.permissible pressure ........................................................................................................................................... 4 5.5 Characteristic 5: Activation / Setting ...................................................................................................................................................... 4 5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4) ......................................................................................... 4 Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteil und wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt. ..................................................................................................................................................................................................... 4 5.7 Characteristic 7: Seal ............................................................................................................................................................................. 4 6 Installation ............................................................................................................................................................................................ 5 6.1 General information ............................................................................................................................................................................... 5 6.2 Connection Recommendations .............................................................................................................................................................. 5 6.3 Installation - installation space ............................................................................................................................................................... 5 7 Notes, Standards and Safety Instructions ......................................................................................................................................... 5 7.1 General Instructions ............................................................................................................................................................................... 5 7.2 Standards ............................................................................................................................................................................................... 58 Zubehör .................................................................................................................................................................................................5w e e n g i n e e r y o u r p r o g r e s s1The pressure valve is designed as cartridge valve. It is a direct operated valve for flow rates up to 10 l / min, which can be adjusted manually. The adjustment can be protected by a cap. The components are designed robust. The valve can be charged up to 500 bar and is delivered at a certain pressure.1.1 ApplicationThe pressure valve is used to protect high volume lift cylinders in truck cranes. It should avoid excessive pressure increase in unmoving cylin-ders due to warming (“sushine valve”).1.2 Recommended Installation2 FunctionThe pressure valve operates as a direct acting seat valve. The pressure can be set using an adjusting screw. The screw is locked after adjustment with a backup sealing nut and can be protected by a cap.2.1 Features▪ Cartridge type▪ Small installation space ▪ Robust construction▪Stepped cavity (corresponds to Bucher UVP-4) ▪Seat valve, leakage freeP – protected port T - tankw e e n g i n e e r y o u r p r o g r e s s3 Technical Data4 4.1 Type CodeXXX – fest vorgegebene Merkmale XXX – vom Kunden wählbare Merkmale4.2 Versions currently availableThe versions listed below are available as standard. Further versions as part of the options given on the type code can be configured upon request.designationtype codepart nr.PRV –DSU –CA -10LPM -500BAR –MAN230BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN230 –239 -N 412.072.451.9 PRV –DSU –CA -10LPM -500BAR –MAN235BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN235 –239 -N 412.072.430.9 PRV –DSU –CA -10LPM -500BAR –MAN290BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN290 –239 -N 412.072.433.9 PRV –DSU –CA -10LPM -500BAR –MAN340BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN340 –239 -N 412.072.431.9 PRV –DSU –CA -10LPM -500BAR –MAN420BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN420 –239 -N 412.072.432.9CriteriaUnit Value Installation position any Weightkg 0,1Surface protectiveZinc coated Maximum input pressure (P) bar 550Adjustable pressurebar 100 - 500 Maximum Tankpressure (T) bar 8 Maximum input flow rate (P) l/min 10Hydraulic fluidMineral oil (HL, HLP) conforming with DIN 51524, other fluids upon re-Hydraulic fluid pressure range °C -25 bis +80 Ambient temperature °C < +50 Viscosity rangemm2/s 2,8 - 500Contamination gradeFiltering conforming with NAS 1638, class 9, with minimum retentionPRVDSUCA10500239N000102030405060700 Product group Pressure relief valves PRV 01 Variant manual adjustable DSU 02 Port / Case Cartridgeventil CA 03 Input flow rate Qmax.10 l/min 1004 Max.permissible pressure Pmax.. 500bar50005 Activation Man ually adjustable 100-500barMAN100 06 Stepped cavity WESSEL-Patrone 8.00239 (stepped cavity) 239 07 Seal NBR, temperatur range -25°C bis +80°CNw e e n g i n e e r y o u r p r o g r e s s5 5.1 Characteristic 1: Variant DSUAdjustable pressure relief valve5.2 Characteristic 2: Port / Case: Variant CA - CartridgeAs variant CA, the valve is delivered as a cartridge valve. The Cavity has to be designed according to characteristic 6 (stepped cavity)5.3 Characteristic 3: input flow rateRecommended maximum flow rate of 10 l/min.5.4 Characteristic 4: Max.permissible pressureMaximum permissible pressure is 500bar (adjustable range100 - 500bar)5.5 Characteristic 5: Activation / SettingThe valve can be adjusted with a set screw. For this purpose, the protective cap must be removed and the counter nut undone.5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4)Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteilund wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt.5.7 Characteristic 7: SealNBR, temperature range -25°C bis +80°Cw e e n g i n e e r y o u r p r o g r e s s6 Installation6.1 General information▪ Observe all installation and safety information of the construction machine / attachment tools manufacturer. ▪ Only technically permitted changes are to be made on the construction machine. ▪ The user has to ensure that the device is suitable for the respective application. ▪ Application exclusively for the range of application specified by the manufacturer. ▪ Before installation or de-installation, the hydraulic system is to be depressurized. ▪ Settings are to be made by qualified personnel only.▪ Opening is only to be performed with the approval of the manufacturer, otherwise the warranty is invalidated.6.2 Connection RecommendationsNOTE : Enclosed proposed resolution is not always guaranteed. The functionality and the technical details of the construction ma-chine must be checked.5.3 Montage – BauraumObserve connection names.Do not damage seals and flange surface. Its hydraulic system must be ventedEnsure sufficient free space for setting and installation work6.3 Installation - installation space▪ Observe connection names.▪ Do not damage seals and flange surface. ▪ Its hydraulic system must be vented▪ Ensure sufficient free space for setting and installation workCAUTION: Hydraulic hoses must not touch the pressure relief valve, otherwise they are subject to thermal damaging. Tightening torques must be observed. Torque wrench needed.77.1 General Instructions▪The views in drawings are shown in accordance with the European normal projection variant▪ A comma ( , ) is used as a decimal point in drawings ▪All dimensions are given in mm7.2 StandardsThe following standards must be observed when installing and operating the valve:▪ DIN EN ISO 13732-1:2008-12, Temperatures on accessible surfaces8 ZubehörSafety cap: 275.066.000.6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Virtual Arch Type Reconfigurable Machine Tool Design:Principles and MethodologyReuven Katz, Yong-Mo MoonThe University of MichiganNSF ERC for RMSAnn Arbor, MI 48109September, 2000AbstractThe report presents a new approach for designing a Reconfigurable Machine Tool (RMT). The design methodology presented in the report was developed in ERC/RMS at the University of Michigan and it generates all kinematicaly feasible RMT designs. The design of a new RMT is not just configuring the existing modules for a specific task, but rather a design of a new type of machine, which can illustrate the ideas of reconfiguration science. This report illustrates the characteristics of RMTs by showing design procedures of virtual arch type RMT. Finally, the report justifies the need for building a RMT prototype by reviewing the academic and economic value of the machine.1 IntroductionThe goals of this report are: a. To present the concept of “Highly Reconfigurable Non-Orthogonal Machine Tool”. b. To present the design concepts of a “Virtual Arch type RMT”. c. To check to what extent its features represent and reflect the basic principles and characteristics of a typical Reconfigurable Machine Tool as defined by [Koren, 1999], and d. to present a general methodology for the design of RMTs.Although the machine is experimental, it reflects specific need that may arise in the practical machining production line. Virtually we consider engine block heads as the target product of the virtual arch type RMT. Therefore, the machine is not designed with the intention to fit directly into an industrial environment. It was rather designed to function in the ERC testbed as an experimental prototype to prove the concepts of reconfiguration. We believe that the industry may and will apply the general concepts demonstrated by the Virtual Arch RMT, but may use modified reconfigurable machine tool design to meet its production line needs and some specific machining operations.The Arch Type RMT is an experimental prototype machine that is designed to demonstrate basic design and functional concepts of reconfigurable machine tools. As explained later in the report, the machine should be designed around a family of functional features derived from the requirements of producing part family in a production line. The production line represents our machining system, it shows cost effective in many cases to build RMT around part family for such system, rather than building a general-purpose CNC and adapt the part to the machine. The reconfigurable production line as well as the reconfigurable machine tool is designed at the outsetwith clearly defined part family and the role of each machine tool that comprises the line. The suggested concept should decrease cost and enhance reliability of the machine, since it reduces complexity by reducing the number of active axes of motion during machining.The philosophy and the evolution of “Curve shaped” machine tool design is discussed in one of the chapters. The methodolo gy of RMT design and its application for Virtual Arch RMT design are explained in details. The benefits and risks associated with the building process of an original and innovative RMT are discussed. Conclusion and recommendation conclude the report.As a result of the presented study, we conclude that ERC/RmS may benefit from building the Virtual Arch RMT, therefore, we recommend to build it.For readers who want to understand more about the RmS, the references such as Bollinger [1998], Koren [1997,1998, 1999] and Ulsoy [1998] would be helpful. Also references Lee [1997] and Rogers [1997] may help to understand the reconfiguration science.2 RMT principles and characteristics as applied in the design of Virtual Arch Type RMTIn this chapter we shall analyze to what extent the RMT principles and characteristic[Koren, 1999 ] are reflected in the design of “Virtual Arch Type RMT”? We shall try to address this topic in a systematic way in order to gain better understanding.2.1 Principles2.1.1The Reconfigurable Machine Tools should be designed for reconfiguration at theoutset.The “Virtual Arch Type RMT” is designed at the outset for reconfiguration and the amount of reconfiguration is determined from the part family. We allow reconfiguring the machining angle in a discrete manner in the range of –15 up to 45 degrees. We have to remember that our specific machine is an experimental machine tool, which is not designed to meet any particular industrial requirements. However, the design took into consideration, a well defined “part family” with a well defined “family of functional features” such as some milling and drilling operations which take place on an inclined surface as shown in figure 5.1. Drilling and milling operation on inclined surfaces are typical to m any mechanical parts in the automotive industry and in many other industries. Therefore, it represents a wide span of realistic options to utilize the idea of angular reconfiguration and to apply this idea in a design of some other reconfigurable machine tools that will be built at the outset to enable the change of the machining angle.2.1.2 The Reconfigurable Machining Systems should have a modular structure, for bothmachines and controls, designed for easy integration.Although the principle is a “system level” or RmS principle, the RMT, being part of the system, should posses modularity features. RMT modularity concepts will be discussed in later chapters.2.1.3 The Reconfigurable Machine Tools should be designed for a feature family withbuilt-in customized flexibility.The Virtual Arch type RMT is designed for either drilling or milling on an inclined aluminumsurfaces of some part which belongs to a specific “part family” where the part family and feature family determine the reconfigruation of RmSs and RMTs respectively. The customized flexibilityof the Virtual Arch type RMT implies that it was designed at the outset to perform a “family offunctional features”. For example, a hole on an inclined surface or a groove or any othermachining operation on an inclined surface the designer knew about in advance.In an industrial application the Virtual Arch type RMT may be installed in a ReconfigurableMachining System, or the reconfigurable production line. Usually it will serve as one out ofmultiple of m achine tools. The line is designed at the outset to produce some specific “partfamily” where the change of an inclination angle of the surface is required. Reconfiguration requirements in practical industrial application should reflect the knowledge and t he vision of engineers and marketing executives to predict future market demands for new products. Based on those predictions the manufacturing line should be designed at the outset for flexible reconfiguration utilizing RmS and RMT principles.2.1.4 The RMS is designed for a shorter cycle time with production done in batches, with ashort conversion time between batches. The RMTs installed in the system should be designed to meet this requirement.The Virtual Arch type RMT is designed to meet short conversion time between batches. The reconfiguration process is planned to be short, less than an hour including calibration if needed.2.1.5 The RMT and its controller are designed for diagnostics to allow errors due toconversion & Reconfiguration to be diagnosed systematically.A built-in process of the Virtual Arch type RMT measurement and calibration is designed at the outset. In addition to the precise fixture of the spindle platen to the arch plate, we shall design an Electro-optical device to allow tool t ip positioning and error correction. Other means of diagnostics, such as tool wear sensors or maintenance data collecting sensors may be added.2.2 CharacteristicsThe main characteristic of any RMT is its customized flexibility. This property makes it unique and different from both the dedicated machine and the CNC machine that may share with RMT characteristics such as modularity, integrability or diagnostability.2.2.1 CustomizationThis characteristic defines two aspects: customized flexibility and customized control. Customized flexibility means that the Virtual Arch RMT is built around family of functional features. An example of such family of functional features is the drilling of several holes on an inclined surface done in one station of a production line. We design at the outset for the possibility that the inclination angle of the surface may change when the next generation of the same part family will be introduced. Customized flexibility represents the ability of the machine to change its spindle angular position or to provide only the flexibility needed for those specific parts.At another station along the same production line, a second Virtual Arch RMT may be used for face milling of an inclined surface. When a new part generation with a di fferent inclinationangle is introduced, once again the customized flexibility of the RMT may be applied for a lowcost reconfiguration process of the milling RMT.Customized control of Virtual Arch RMT is achieved by integrating control modules with theaid of open-architecture technology, providing the exact control functions needed for controling non-orthogonal machine. For example, the cosine functions will be fed in to the controller forinclined surface milling with predefined angles.2.2.2 ModularityThe Virtual Arch type RMT will be designed to meet modularity concepts such as: applyingmodular structural elements of the spindle assembly in order to allow spindles interchangability;designing unified fasteners and connectors; applying the X-axis design out of “Lamb” modulslibrary; applying modular and open control design; enabling interface to the integration of thePetri-Net-based discrete logic control; using modular software.2.2.3 ConvertibilityIn a reconfigurable system the optimal operating mode is configured in batches that should becompleted during one day, with short conversion times between batches. Conversion requireschanging tools, part-programs, and fixtures, and also may require manual adjustment of passivedegrees-of-freedom of the machine. As stated the conversion of Virtual Arch RMT should beshorter than one hour.2.2.4 IntegrabilityThe Virtual Arch type RMT mechanical elements and control modules are designed withinterfaces for easy component integration and replacement. The integrated machine performancemay be predicted according to the performance of its components and the interfaces of bothsoftware and machine hardware modules.2.2.5 DiagnosabilityThe Virtual Arch RMT will include built in and add-on metrology devices that measure theaccuracy of the machine following a reconfiguration process and built in methodology to calibrate the machine tool on-line. The Virtual Arch RMT may include in the future sensors to measure changes in machine parameters that may affect either machine performance such as: machine tool wear or thermal errors or machine maintainability parameters such as changes in motors moments or oil leakage. (It is a budgetary decision only, whether to include them or not).2.3 SummaryAs shown, the Virtual Arch Type RMT meets most of the principles and characteristics of RMT according to ERC basic definitions.The main idea of RmS principles suggests that there are many other RMT concepts and configurations, which may be designed at the outset for the machining of a different part family and a different family of functional features that meet similar set of principles and characteristics.There is no one preferred machine design that represents the reconfigurability principles in an optimal and exclusive way. Therefore, it is for the ERC to choose one concept that represent originality as well research and education benefits, at the same time the conceptualdesign may be applied in practice is a production line with relatively minor redesign and investment.3 RMT Design Methodology3.1 Introduction to RMT design methodology [Moon, 2000]The RMT design methodology was developed [Moon and Kota, 1998, 1999, and Moon, 2000]. The idea of Reconfigurable Machine Tool (RMT) goes beyond the concept of modularity in that a RMT allows mass customization, facilitates easy integration of new technologies, is cost-effective, and provides high-speed capability. RMT design methodology presents a scientific basis for design of RMTs starting process requirements. The references address the following issues:?The basic building blocks (or modules) of RMTs? A method of representation of modules that allows computational synthesis? A method of representation of desired machining tasks?Systematic enumeration of alternate designs?Development of new module.s3.2 RMT design methodology overviewFigure 3.1 Overview of RMT design methodology [Moon and Kota, 1999]The key feature of this methodology is the use of screw-theory based mathematicalrepresentation to transform a given description of machining tasks to be performed (processplanning data) into a machine tool concept that is capable of performing the prescribed tasks. Starting from machining operations data, a set of feasible structural configurations of the machineis determined using graph theory. Various kinematic functions, (motions and base position) arethen mapped to individual entities in each structural configuration. Using a precompiledparameterized library of commercially available machine modules, each function i s then mappedto a feasible set of modules. This provides a set of kinematically feasible machine tools thatprovide desired motions.4 Design of Virtual Arch Type RMT4.1 The Evolution of Arch Design IdeaThe virtual arch type RMT design is derived idea from the RMT patent [Koren and Kota,1998]. The concept of non-orthogonal machine should be convertible to the existing machine toolto increase the reusability of RMT.The goal of this chapter is to present the evolutionary design process of only one p ossiblefamily of reconfigurable machine tools suitable for machining on inclined surfaces whichrepresents only one “family of functional features” required in machining processes.There is no single preferred machine design that represents the reconfigurability principles. One may suggest for example a RMT concept that uses an “add-on strategy” of orthogonal axes modules in order to increase the number of degrees of freedom for cutting.The Virtual Arch type RMT originated from a different need related to angular positioning ofthe spindle and machining features such as drilling holes on an inclined surface or milling on aninclined surface. The evolution process is described below.Starting with the “Igloo” approach of a machine with spindles located on a hemispherepointing at different angles towards the workpiece (Figure 4.1). There are several advantages to the Igloo machine related to its geometry however, it does not fit a production line where there is a transfer line and a flow of parts.Figure 4.1 Igloo machine conceptual designTo overcome the problems of the igloo concept, the next idea was the “Tunnel shaped” machine tool (Figure 4.2). It kept the circular shape and enabled material flow. Such a machine is difficult to implement in practice and difficult to maintain.Figure 4.2 Tunnel shaper machine conceptual designTo overcome the maintenance problem, circular and the arch type machines were suggested (Figures 4.3).(a) Single arch configuration (b) Double arch configurationFigure 4.3Concept of circular arch type machineThe idea of moving the arch along a column in order to relocate its position is shown in (Figure 4.4) [Koren and Kota, 1999]Figure 4.4 Concept of arch type machine with moving columnIn order to decrease the moments applied on the structure and size of the machine a “Side Mounted Arch type RMT” was suggested. A circular bearing is used for continuous reconfiguration location possibility. (Figure 4.5) The machine is non-orthogonal and milling on an inclined surface can be only achieved by combined motion of two axes.Figure 4.5 Arch type machine with circular bearing conceptual designThe Virtual Arch type RMT is an evolution of the former concept, eliminating the unique circular bearing and suggesting discrete angular positioning of the spindle at pre-defined location along a “Virtual arch”. (Figure 4.6). This machine has a non-orthogonal geometry as well.Figure 4.6 Virtual arch type machine conceptual designMastering the non-orthogonal properties of machine tools may lead to the next step that may be an application that represents a machine with a general planar curvilinear path (Figure 4.7).Figure 4.7 Curve linear machine conceptual designAn idea to eliminate the need of a non-orthogonal moti on while cutting on an inclined surface (was suggested by Dr. Min from ERC/RMS) as shown (Figure 4.8). However, the tool is always orthogonal to workpiece and moves like in any other orthogonal machines.ArbitrarySpindle PathFigure 4.8 Arch type machine with orthogonal motion conceptual design Summary: The final Virtual Arch type RMT design hardly resembles the curved structures of some of the machines that were described herein, however, we have shown how the evolutionary process leading us to the final design concept.4.2 Task ClarificationAt this section, we will show the design procedures of RMT using PREMADE (Program for REconfigurable MAchine tool DEsign) which is RMT design software.The input for PREMADE is operation plan which includes the machining operation information and machining feature family data. We are assuming that the target part family is engine blocks head as in figure 4.9.(a) V-6 engine block head (b) V-8 engine block headFigure 4.9 Engine block part familyFrom the operation information and design variables of the engine block heads in figure 4.9, we made our sample part family as in figure 4.10. It has different inclined surfaces from –15? to 45?. The operation plan for the virtual arch RMT contains both milling and drilling operations performed on four different parts of one parts family (Figure 4.10).TX TYTZTXTYTZTXTYTZ TXTYTZ(a) 45?(b) 30?(c) 15?(d) -15?Figure 4.10 Machining feature familyBy the developed kinematic analysis method, the required motions for machining features were selected to be a translation along the surface (TX) and a translation normal to surface (TZ). The configuration difference between features needs a rotational motion (RX). The configuration changes between machining features imply reconfigurations of a machine tool which can be achieved ether by active motion(s) or passive motion(s).Figure 4.11 PREMADE task clarification moduleThe list of required motions uses screw dual number form which was developed to represent the motions of tool [Moon and Kota, 1999, Moon, 2000, Chen, 1993].4.3 Structure DesignThe structural design of RMT uses graph theory to represent the machine tools’ functional and structural topology [Shinno,1981,1984,1987, Moon, 2000].Virtual arch RMT needs three active motions and there already many machine tools are available for three DoF cases, known as 3-Axis CNCs. In this example, we are about to use oneof those CNCs, Lamb’s Jaguar Series. But we have additional rotational motion and it is assigned as in figure 4.12.Figure 4.12 PREMADE structure design module4.4 Module SelectionAs we mentioned before, PREMADE has functionality to access the network and review the available modules’ information to select all the candidate modules.Figure 4.13 PREMADE supplier selection moduleOnce the module library includes a virtual arch plate as a machine module then the design theory can include it as a part of configurations. As shown in figure 4.1, the design theory canT XT Y T Z T RBasegenerate a new set of RMT configurations around a given family of machining features or it can generate a set of configurations from an existing machine configuration for the new family of machining features. Including a virtual arch plate in parameterized module library enalbes the design of virtual arch type machine.Figure 4.14 PREMADE module selection moduleAfter selection of all the candidate modules to meet the functional and structural requirements, a solution graph can be generated as in figure 4.14. This graph contains all the feasible solutions for the required set of machining features.4.5 Configuration EvaluationFigure 4.15 PREMADE configuration evaluationSince the evaluati on function of the PREMADE is not fully functional yet, we used traditional evaluation method for dynamic/static stiffness analysis.After reviewing all the feasible configurations shown in figure 4.16, the design in figure 4.17 was selected as the final design. The process of selecting a preferred configuration is descried in Katz and Chung’s work [2000].(a) Configuration #1 (b) Configuration #2Figure 4.16 Generated configurations(c) Configuration #3 (d) Configuration #4(e) Configuration #5 (f) Configuration #6Figure 4.16 Generated configurationsFigure 4.17 Selected virtual arch RMT configuration4.6 FEA of Selected ConfigurationFigure 4.18 FEA Model of Virtual Arch RMTTo verify the dynamic and static characteristics of virtual arch RMT, we used FE method using comecial software (I-DEAS 6). When the spindle assembly is at 45? angle the natural frequencies and mode shapes are as in figure 4.19.All the interfaces are assumed to be rigid thus the natural frequencies are estimated higherthan the real values.(a) First Mode (82.0 Hz)(b) Second Mode (87.5 Hz)Figure 4.19 FEA result when spindle module is 45?(c) Third Mode (143 Hz)Figure 4.19 FEA result when spindle module is 45?From the modeshape of the first mode, it is clear that the tip of the arch plate is the most flexible (weak) part. Thus to improve the dynamic chracteristics of the virtual arch RMT, stiffning of the arch plate is the most efficient method.(a) First Mode (94.0 Hz)Figure 4.20 FEA result when spindle module is 0?(b) Second Mode (96.4 Hz)(c) Third Mode (150 Hz)Figure 4.20 FEA result when spindle module is 0?To verify the effect of spindle module’s position changes, we performed FE analysis after moving spindle modules to 0?. The modeshapes and the natural frequencies are shown in figure 4.20.The first modes of 45? and 0? are 82 Hz and 94Hz respectively. It implies that the position of the spindle module contributes about 13% to the first natural frequency of virtual arch RMT. It also suggests that the machining stability of virtual arch RMT will be affected by the spindle module’s position. When the spindle module is at 45? angle, it behaves like added mass at the end of cantilever beam and lowers the dynamic stiffness of the whole system.5 Benefits and Risks of Building the Arch Type RMT5.1 An Original Machine – An Outcome of Original ResearchThe Virtual Arch RMT is a unique machine, which reflects the RmS philosophy and vision. As shown, the design methodology of ERC Project 4.1 was used to design it. The academic community is looking forward to the ERC/RMS for fresh machine tool concepts, and this is an opportunity to demonstrate one. Virtual Arch RMT is the first testbed for the RMT concept. It would not demonstrate all the characteristics of RMT but it will show most of them.5.2 Virtual Arch RMT as a research tool5.2.1 Providing an Opportunity to Test Theory versus PracticeThe arch-type RMT is a prototype for testing the new RMT design methodology. The new phase of Project 4.1 includes not only generation of kinematics, but also the design and analysis of the machine dynamics.In order to evaluate the possibility of building industrial machines based on reconfiguration concepts it is necessary to build this prototype. The machine will serve also as a research platform for additional aspects of machine reconfiguration as explained below.5.2.2 Machine Tool MetrologyOn-line measurements and calibration process of the RMT during the assembly of the machine and following reconfiguration, is more challenging than that of a conventional machine due to angular positioning errors of a spindle axis. The ERC will develop a novel method for the calibration of the RMT. This method and the sensors may be applied to commercial machine tools to enhance their precision.5.2.3 ControlThe control of the machine will be based on open-architecture principles. This will enable the ERC to integrate real-time machine diagnostics that can be studied for future plant impl ementation. In addition the machine will be designed with an interface to allow the future integration of the Petri-Net-based discrete logic control that was developed in Project 3.1.The conventional CNC control for orthogonal axes does not fit this machi ne. A new control strategy that can enable non-orthogonal operations with a changing position of the spindle axiswas developed by ERC researchers and shows promising results in simulations. The building andtesting of the machine will enable us to validate this novel control methodology.5.3 Educational BenefitsThe Virtual Arch RMT will serve as an educational tool to present and teach the concept ofmachine tool reconfiguration, system design and integration. There is no other machine that maydescribe and demonstrate these concepts. The RMT will enable students to undertake practicalprojects for the course ME-583: Science Base for Reconfigurable Machining Systems. The RMTdemonstration can be integrated in several courses: IOE-425 Manufacturing Strategies; ME-381 Manufacturing Processes; ME-450 Design Projects; ME-584 Control of Manufacturing Systems;ME-585 Machining Dynamics; and IOE-601 In-Process Quality. During machining workshopclasses the RMT will be used as an educational tool for machining of different parts using thereconfiguration ability of the machine.We believe that the RMT will serve many “generations” of ERC graduate students as avaluable research platform.5.4 Risk assessment of building Virtual Arch RMTLike in any development of an experimental and novel approach, there is some risk involved.First we would like to define possible modes of failure related to technical issues:Critical Failure– The RMT is built and integrated, however, due to major errors themachine does not operate or shows severe safety hazards.Moderate Failure – The RMT is built and integrated, but does not meet some performance requirements.Minor Failure- The RMT is built and integrated but still needs some redesign of itselements in order to operate and meet main operational requirements.Second family of mode failure classification may be related to the “Marketing” process ofreconfiguration concepts by ERC, using the RMT as a demonstration tool. We shall not definemodes of failure here, however, we shall address this important topic later.7.5What is the risk of building the Virtual Arch RMT and how to reduce it?5.5.1 Any design process of an innovative system includes risky elements; therefore, riskmanagement is essential.Risk reduction process related to the technical aspects is directly related to the ability ofmanaging efficiently and professionally the project development process.The process described herein is typical for a new R&D prototype construction.First, all required machine specifications have to be well defined.Conceptual design of the machine as a system and all of its major elements, is the secondimportant step. About 70% of the important features and properties of the machine and itsprobability to operate successfully are defined at this stage. In order to reduce the risk, theconceptual and detailed design should be accompanied by analyses, simulations and documentedcalculations and reasoning.Professional design review process is an additional measure to eliminate major errors andreduce risk.。