seg.h数码管驱动
简述数码管的驱动原理和应用
简述数码管的驱动原理和应用一、驱动原理数码管是一种能够显示数字、字母和符号等信息的显示器件,广泛应用于计算机、电子仪器仪表、计时器和计算器等电子设备中。
数码管的驱动原理是通过控制不同的电流流经不同的LED管来显示不同的字符。
数字数码管主要由7个LED管组成,每个LED管被称为一个“段”,由a、b、c、d、e、f和g七个片段组成。
通过不同的LED管组合可以显示0-9、A-F等字符。
数码管的驱动采用共阳极和共阴极两种方式。
共阳极数码管中,电源连接到所有的阳极上,各个LED片段被接到各个阴极上。
当需要点亮某个片段时,对应的阴极接通电流,而阳极接通地。
共阴极数码管则恰好相反。
二、驱动应用1. 计时器和钟表数码管广泛应用于计时器和钟表等设备中,用于显示时间和计时功能。
计时器通常使用共阳极数码管,通过控制各个阴极来显示不同的数字。
通过组合不同的数码管,可以实现小时、分钟和秒的显示。
2. 电子仪器仪表在电子仪器仪表中,数码管常被用于显示各种测量参数,如电压、电流、温度等。
通过将数码管与传感器连接,可以将传感器获取的物理量转换为数字信号,并通过数码管进行直观显示。
3. 计算器和电子屏在计算器和电子屏幕中,数码管被广泛用于显示数字和算式。
通过控制不同组合的数码管,可以显示各种数字和算符,实现数字输入、运算和显示。
4. 游戏机和娱乐设备数码管也常被用于游戏机和娱乐设备中,用于显示分数、倒计时和游戏信息等。
通过控制数码管的显示,可以提供更加直观和有趣的游戏体验。
5. 路灯和信号灯在路灯和信号灯中,数码管通常被用于显示信号状态和倒计时功能。
通过控制数码管的显示,可以提供更加清晰和直观的信息,方便行人和车辆观察和判断。
6. 信息显示数码管在信息显示设备中也有一定的应用,如价格显示器、公告牌等。
通过使用数码管显示信息,可以提供更加直观和醒目的展示效果,吸引观众的注意力。
三、总结数码管通过控制LED管的点亮与熄灭来显示数字、字母和符号等信息。
驱动数码管程序
//GPIO define//FUNCTION:用595完成八位数码管显示-------------------------------------------------------------------------- */#include <stm32f10x_lib.h> /* STM32F10x Library Definitions */#include "UET_GPIO.h"//unsignedchar seg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e ,0x8c,0xc1,0xce,0x91,0x89,0xc7,0xff};unsigned char seg[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x73,0x78,0x5c,0x54,0x40,0x81,0x88,0x3e,0x70,0x00} ;//0,1,2,3,4,5,6,7,8,9,//A,b,C,d,E,F,P,t,o,n,//-,~,_,U,r,SP,//unsigned char DAT[]={0x7f,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; //位选择unsigned char BitSelect_Code[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; //因为ULN2803驱动反相,所以位码要用共阳极的位码//COM1 COM2 COM3 COM4 COM5 COM6 COM7 COM8//B0 B1 B2 B3 B4 B5 B6 B7unsigned char Disp_buffer[]={0,1,2,3,4,5,6,7}; //段缓冲区unsigned char Bit_NO=0 ; // 选择第Bit_NO 位数码管unsigned char Buffer_NO=0; // 缓冲区的第Buffer_NOu32 LED_DATA=01234567;#define SER(x) GPIOA->ODR=(GPIOA->ODR&~GPIO_Pin_7) | (x ? GPIO_Pin_7 : 0)#define SCK(x) GPIOA->ODR=(GPIOA->ODR&~GPIO_Pin_5) | (x ? GPIO_Pin_5 : 0)#define RCK(x) GPIOA->ODR=(GPIOA->ODR&~GPIO_Pin_6) | (x ? GPIO_Pin_6 : 0)/******************************************************************************* * Function Name : void WR_595(unsigned char segdata)* Description : 595串行输入* Input : 段码* Output : None* Return : None*******************************************************************************/ void WR_595(unsigned char segdata) //输入一字节数码管数据进595{unsigned char i,temp;temp=segdata;for(i=0;i<8;i++) //循环移入8位数据,{SCK(0);if(temp&0x80) // 取数码的最高位SER(1);elseSER(0);temp=temp<<1;SCK(1); //上升沿把一位数据移入595}}/******************************************************************************* * Function Name : void OUT_595(void)* Description : 595锁存输出* Input : 段码* Output : None* Return : None*******************************************************************************/ void OUT_595(void) //上升沿将数据送到输出锁存器{unsigned i;RCK(0);for(i=0;i<10;i++) ;RCK(1);RCK(0);}/******************************************************************************* * Function Name : void LED_Brush(u32 LED_DATA)* Description : 数码管缓冲数据刷新* Input : u32 LED_DATA* Output : None* Return : None*******************************************************************************/void LED_Brush(u32 LED_DATA){Disp_buffer[0]=LED_DATA/1000%10;Disp_buffer[1]=LED_DATA/100%10;Disp_buffer[2]=LED_DATA/10%10;Disp_buffer[3]=LED_DATA%10;Disp_buffer[4]=LED_DATA/10000000;Disp_buffer[5]=LED_DATA/1000000%10;Disp_buffer[6]=LED_DATA/100000%10;Disp_buffer[7]=LED_DATA/10000%10;}/******************************************************************************* * Function Name : void Display(void)* Description : 显示* Input : None* Output : None* Return : None*******************************************************************************/void Display(void){LED_Brush(12345678);//调用显示函数WR_595(BitSelect_Code[Bit_NO]); // 位码WR_595(seg[Disp_buffer[Buffer_NO]]); //段码OUT_595();Bit_NO++;Buffer_NO++;if( Buffer_NO>7) Buffer_NO=0;if(Bit_NO>7)Bit_NO=0;}。
数码管驱动与程序设计

数码管驱动与程序设计正文:一:引言数码管是一种常见的显示器件,广泛应用于各类电子设备中。
本文将介绍数码管驱动原理及程序设计方法。
二:数码管基础知识2.1 数码管结构和工作原理:包括共阳极与共阴极两种类型的接线方式以及其对应的工作原理。
2.2 数字编码格式:介绍BCD(Binary-Coded Decimal)和7段数字编码等常见数字表示形式。
三:数位扫描技术3.1 静态扫描法:详解静态扫描法实现多个数位同时显示,并给出相应示意图。
3.2 动态行列交替刷新法:讲解动态行列交替刷新法实现高亮度且节省IO口资源,并提供相关代码片段。
四:驱动芯片选择与使用指南4.1 常用驱动芯片推荐:4.1.a 具有集成锁存功能的74HC595;4.1.b 双向移位寄存器CD4099B;4.c 拓展型单通道LED控制IC MAX7219/722X系列。
五:程序设计方法论述5.1 C语言下直接操作I/O端口进行控制:通过C语言内嵌汇编或者直接操作寄存器的方式进行数码管驱动。
5.2使用Arduino库函数:介绍使用Arduino开发板及其相关库函数实现简单快捷的数码管控制。
六:案例分析6.1 数字时钟设计与实现: 详述数字时钟系统中涉及到的硬件电路和软件程序,并给出完整代码示例。
6.2 温度显示仪表盘设计与实现: 分析温度传感器数据采集以及相应显示方法,提供可参考代码片段。
七:附件:本文档所涉及内容包含以下附件:7.1 示意图:静态扫描法原理示意图;7.2 示例源代码:基于C语言编写的数位扫描程序;7.3 Arduino Library文件等。
注释:- BCD(Binary-Coded Decimal)二进制编码十进制表示形式,将每个十进制数字用4位二进制来表示。
- 共阳极(Common Anode)是指所有LED共享一个正级端口而各自独立地连接至负级或GND引脚;共阴极(Common Cathode)则反之。
数码管的动态扫描与驱动

数码管的动态扫描与驱动数码管的基本原理 关于数码管,⼀个单个的数码管可以看做是多个led灯的集合,如下图所⽰其中的8和。
都是LED组成的,通过引脚上电即可点亮不同的LED然后组成不同的数字,这个过程在数码管的设计中叫做段选。
在多个数码管的情况下,需要选择哪个数码管点亮,这个在数码管设计中称作位选,多个数码管可以通过位选和段选完成电⼦时钟设计等功能。
下⾯通过项⽬对于多个数码管进⾏点亮,让其在开发板上显⽰不同的数据。
预计实验现象: 在quartus的in system source and probes editor ⼯具,输⼊需要显⽰在数码管上的数据,则数码管显⽰对应数据。
相关知识点: 数码管动态扫描的实现、in system source and probes editor调试⼯具的使⽤。
设计过程: 1、数码管动态扫描实现。
2、In system sources and probes edit (ISSP)调试⼯具的使⽤ 3、4输⼊查找表,6位输出。
4、分频模块,从系统时钟分频得到1KHz的扫描时钟 5、6选⼀多路选择器,选择为当前数码管的位置。
驱动模块逻辑电路图:下⾯就是照着逻辑电路图来编写程序了。
创建⼯程,添加⽂件module segment(disp_data,rst_n,clk,en ,sel,seg);input clk;//50Minput rst_n;input en;input [23:0]disp_data;output [5:0]sel;//位选(控制哪个数码管亮)output reg [6:0]seg;//段选(控制数码管显⽰什么数据)//分频器的代码,这⾥为了完整,不做多个⽂件来写模块了reg[14:0] diviter_cnt; //25000-1reg clk_1k;reg [5:0]sel_r;reg [3:0]data_temp;//待显⽰数据缓存//⽣成⼀个分频计数器计数always@(posedge clk or negedge rst_n)if (!rst_n)diviter_cnt<=15'd0;else if (!en)diviter_cnt<=15'd0;else if (diviter_cnt==24999)diviter_cnt<=15'd0;elsediviter_cnt<=diviter_cnt+1'b1;//1k扫描时钟⽣成always@(posedge clk or negedge rst_n)if (!rst_n)clk_1k<=1'b0;else if (diviter_cnt==24999)clk_1k<=~clk_1k; //⼤型设计中,这种产⽣分频器的⽅法是不可以的//位选移位寄存器always@(posedge clk_1k or negedge rst_n)if (!rst_n)sel_r<=6'b000_001;else if(sel_r==6'b100_000)sel_r<=6'b000_001;elsesel_r<=sel_r<<1;//设计⼀个6选⼀多路器always@(*)case(sel_r)6'b000_001:data_temp=disp_data[3:0];6'b000_010:data_temp = disp_data[7:4];6'b000_100:data_temp=disp_data[11:8];6'b001_000:data_temp=disp_data[15:12];6'b010_000:data_temp=disp_data[19:16];6'b100_000:data_temp=disp_data[23:20];defaultdata_temp<=4'b0000;endcase//译码器always@(*)case (data_temp)4'h0:seg=7'b1000000;//这⾥按数码管码表来4'h1:seg=7'b1111001;4'h2:seg=7'b0100100;4'h3:seg=7'b0110000;4'h4:seg=7'b0011001;4'h5:seg=7'b0010010;4'h6:seg=7'b0000010;4'h7:seg=7'b1111000;4'h8:seg=7'b0000000;4'h9:seg=7'b0010000;4'ha:seg=7'b0001000;4'hb:seg=7'b0000011;4'hc:seg=7'b1000110;4'hd:seg=7'b0100001;4'he:seg=7'b0000110;4'hf:seg=7'b0001110;endcase//⼆选⼀多路器assign sel=(en)?sel_r:6'b000_000;endmodule编写testbench⽂件来进⾏仿真`timescale 1ns/1ns`define clk_period 20module HXE_tb;reg Clk; //50Mreg Rst_n;reg En; //数码管显⽰使能,1使能,0关闭reg [31:0]disp_data;wire [7:0] sel;//数码管位选(选择当前要显⽰的数码管)wire [6:0] seg;//数码管段选(当前要显⽰的内容)HXE8 HXE8(.Clk(Clk),.Rst_n(Rst_n),.En(En),.disp_data(disp_data),.sel(sel),.seg(seg));initial Clk = 1;always#(`clk_period/2) Clk = ~Clk;initial beginRst_n = 1'b0;En = 1;disp_data = 32'h12345678;#(`clk_period*20);Rst_n = 1;#(`clk_period*20);#20000000;disp_data = 32'h87654321;#20000000;disp_data = 32'h89abcdef;#20000000;$stop;endendmodule点击仿真运⾏,可以看到sel和seg的输出与我们期望的是⼀样的,即位选进⾏移位操作,段选显⽰123456和abcdef。
数码管驱动程序实例
数码管驱动程序实例介绍数码管是一种常见的显示设备,通常用于显示数字和部分字母。
为了控制数码管的显示内容,我们需要编写一段驱动程序来控制数码管的工作。
本文将介绍一个数码管驱动程序的实例,包括硬件连接、代码编写和运行效果展示。
通过学习这个实例,你将了解到如何使用Arduino来驱动数码管进行数字显示。
硬件连接首先,我们需要准备以下硬件组件:•Arduino开发板•数码管(常见的有共阳极和共阴极两种类型)接下来,按照以下步骤进行硬件连接:1.将Arduino开发板与电脑连接,并打开Arduino IDE。
2.将数码管的引脚与Arduino开发板上的数字引脚相连。
具体连接方式取决于你使用的数码管类型,请参考相关资料或数据手册。
3.使用面包板或杜邦线等工具完成引脚连接。
代码编写完成硬件连接后,我们可以开始编写代码了。
以下是一个简单的数码管驱动程序示例:// 引入库#include <SevSeg.h>// 创建一个SevSeg对象并指定引脚SevSeg sevseg;void setup() {// 初始化数码管sevseg.begin(COMMON_CATHODE, 4, 3, 2, 1, 0, 6, 7, 5, 8);}void loop() {// 显示数字0-9for (int i = 0; i < 10; i++) {sevseg.setNumber(i);sevseg.refreshDisplay();delay(1000);}}代码解析:1.首先,我们引入了一个名为SevSeg的库,该库提供了控制数码管的函数和方法。
2.在setup()函数中,我们初始化了一个SevSeg对象,并指定了数码管的引脚连接方式。
这里使用的是共阳极数码管,如果你使用的是共阴极数码管,则需要将COMMON_CATHODE改为COMMON_ANODE。
3.在loop()函数中,我们通过一个循环来显示数字0-9。
单片机驱动共阳数码管
单片机驱动共阳数码管共阳数码管是一种常用的显示器件,广泛应用于电子设备中。
单片机作为一种重要的嵌入式系统组件,可以通过控制引脚来驱动共阳数码管显示不同的数字和字符。
本文将介绍单片机驱动共阳数码管的原理和实现方法。
一、共阳数码管的原理共阳数码管是由多个发光二极管组成的,每个发光二极管代表一个数字或字符。
共阳数码管的引脚分为两类:共阳极和段选极。
共阳极是共有的正极,通过控制不同的引脚电平来选择需要显示的数字或字符;段选极则是每个发光二极管的负极,通过控制不同的引脚电平来点亮对应的发光二极管。
二、单片机驱动共阳数码管的方法单片机可以通过控制引脚的电平来驱动共阳数码管。
常用的驱动方式有两种:静态驱动和动态驱动。
1. 静态驱动静态驱动是指单片机直接控制共阳数码管的每个段选极,通过设置引脚电平来点亮对应的发光二极管。
这种驱动方式简单直观,但对单片机的IO资源要求较高,适用于需要同时显示多个数码管的场景。
2. 动态驱动动态驱动是指单片机通过逐个扫描共阳数码管的每个共阳极,并在每个扫描周期内设置相应的段选极电平,实现数码管的显示。
这种驱动方式相对静态驱动来说,对单片机的IO资源要求较低,适用于需要显示较多数码管的场景。
三、单片机驱动共阳数码管的代码实现以下是一个简单的示例代码,演示了如何使用单片机来驱动共阳数码管显示数字0-9。
```C#include <reg52.h>#define SEG_A P0 // 段选极引脚定义#define SEG_B P1#define SEG_C P2#define SEG_D P3void delay(unsigned int t) {while(t--);}void main() {unsigned char segCode[] = {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F}; // 数字0-9的段选码while(1) {for(unsigned char i=0; i<10; i++) { // 依次显示数字0-9SEG_A = segCode[i]; // 设置段选极电平delay(10000); // 延时一段时间}}}```以上代码中,通过循环依次设置段选极的电平来显示数字0-9。
数码管驱动芯片的使用方法

数码管驱动芯片的使用方法一、选择合适的驱动芯片在选择数码管驱动芯片时,需要考虑以下几个因素:1. 数码管类型:不同的数码管类型(如七段数码管、点阵式数码管等)需要不同的驱动芯片。
2. 输出方式:根据数码管的驱动方式(如共阳极或共阴极),选择相应的驱动芯片。
3. 驱动能力:根据数码管的数量和亮度需求,选择具有足够驱动能力的驱动芯片。
4. 控制方式:根据需要,选择支持串行或并行控制的驱动芯片。
二、连接数码管将数码管与驱动芯片正确连接是实现正常显示的关键,以下是连接过程中需要注意的几点:1. 确认数码管的阳极和阴极引脚,确保与驱动芯片的对应输出引脚正确连接。
2. 对于多位数码管,需要使用适当的排线或连接器将所有数码管连接至驱动芯片。
3. 在连接时,确保引脚焊接良好,避免出现虚焊或短路的情况。
三、设置控制信号驱动芯片需要接收控制信号以正确控制数码管的显示,以下是设置控制信号时需要注意的几点:1. 根据具体的应用场景,编写相应的控制程序,生成控制信号。
2. 控制信号的电平标准需与驱动芯片兼容,如TTL或CMOS 电平等。
3. 确保控制信号的时序符合驱动芯片的要求,避免出现显示异常或错误的情况。
四、配置显示模式驱动芯片通常支持多种显示模式,以适应不同的应用需求,以下是配置显示模式时需要注意的几点:1. 根据实际需要,选择适合的显示模式,如静态显示、动态显示等。
2. 配置显示模式的具体参数时,需参考驱动芯片的数据手册或相关技术资料。
3. 在配置过程中,如遇到问题,可查阅驱动芯片的技术支持或联系厂家寻求帮助。
五、供电与接地为保证驱动芯片的正常工作,需要为其提供稳定的供电和接地,以下是需要注意的几点:1. 根据驱动芯片的供电需求,使用适当的电源为其提供稳定的电压和电流。
2. 在供电线上应加装滤波电容,以减小电源噪声对驱动芯片的影响。
第3节-数码管驱动(项目3)
}
void main (void)
{
unsigned char i;
ห้องสมุดไป่ตู้
// 变量 i 作为数组的0~9编号
P2 = 0;//P2.0 = 0,通过反相器反相后,加在数码管公共端上的电压
while (1)
{ P0 = seven_seg[i]; delay(50000); i++;
//输出0~9到共阳七段显示器 //调用时间延迟函数delay()
在程序设计时,库函数可以很方便的被用户程序调用。 例如,利用库函数实现的跑马灯程序为
/************************/
#include<reg51.h> #include<intrins.h>//库函数的头文件
void delay(unsigned int x)
while (1)
{ …….. delay(1000); …… }
}
//调用时间延迟函数,实参为1000
三、有返回值函数
如果函数中要返回数值时,必须使用return命令。 并且返回值的类型必须与函数的类型一致。如把8位8421二 进制码转换成8421BCD码函数。
unsigned char DEC_BCD_conv(unsigned char x)
if(i == 10)
i = 0;
}
}
当程序中使用常量数据时,如共阳数码管数字显示编 码、液晶显示器的汉字编码等,一般希望这些数据当程序 下载到单片机时存放在单片机的ROM区,对此类数据声明前 面需要加上关键字code或const,如数码管的显示编码。
利用数码管也可以显示日期和时间,但是在本项目中, 数字变化时间是由延时函数实现的,由于C语言程序进过编 译后的生成的汇编程序与直接采用汇编语言编写的程序
数码管驱动原理

数码管驱动原理
数码管驱动是指通过控制数码管的各个灯段的开关状态来显示数字、字母或符号的一种电路原理。
它可以将数字或字符以可视化的形式显示出来,广泛应用于计数器、时钟、仪表等设备中。
数码管通常由七段或八段LED(发光二极管)组成,其中每
个段代表数码管的一部分,可以显示数字0-9、字母A-F等字符。
每个数码管的显示原理是根据段选(Segment Selection)
和位选(Digit Selection)来实现的。
段选是通过控制数码管的各个灯段的开关状态来显示所需的数字或字符。
每个灯段对应一个控制信号,当控制信号开启时,该段会显示点亮,反之则灭掉。
例如,当需要显示数字1时,我们需要点亮数码管的第二段和第三段,其他段保持灭的状态。
位选是通过控制数码管的位线来选择需要显示的数码管。
位线控制是将需要显示的数码管的位线设置为高电平,其他数码管的位线设置为低电平。
通过不断地切换位线的状态,可以实现多个数码管之间的显示切换。
例如,我们可以先显示第一个数码管的数字,然后切换到第二个数码管显示数字,以此类推。
数码管驱动的核心是通过控制电平的高低来实现段选和位选。
为了简化电路,常常采用集成数码管驱动芯片,例如常用的
74HC595芯片。
该芯片可以通过串行输入控制多个数码管,
具有较高的集成度和灵活性。
通过合适的电路设计和编程控制,我们可以实现数码管的各种显示效果,例如数字的逐个显示、循环显示、计数显示等。
数码管驱动原理的掌握对于电子设计和嵌入式系统开发具有重要意义,它为我们创造出更多的应用和功能提供了便利。
数码管驱动方式总结
静态显示驱动静态驱动也称直流驱动。
静态驱动是指每个数码管的每一个笔划都由一个I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。
静态驱动的优点是编程简单,显示亮度高。
静态驱动的缺点是占用I/O端口多,如驱动5个数码管静态显示则需要5×8=40根I/O 端口来驱动,实际应用时必须增加译码驱动器进行驱动,增加了硬件电路的复杂性。
动态显示驱动动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制,输出字形码时,所有数码管都接收到相同的字形码,但究竟是那个数码管会显示出字形,取决于选通COM端电路的控制,所以我们只要将需要显示的数码管的选通控制打开,该位就显示出字形,没有选通的数码管就不会亮。
通过分时轮流控制各个数码管的COM端,就使各个数码管轮流受控显示,在轮流显示过程中,由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,这就是动态驱动。
动态驱动的优点是占用I/O线少,只需要X+Y个,X为数码管的笔划数,Y为数码管的个数。
动态驱动的缺点是占用CPU时间长,编程复杂,驱动功率较大。
在动态显示方式中,各数码管轮流工作,为了减轻闪烁现象,每个数码管刷新频率必须大于25 Hz,即相邻两次点亮的时间间隔要小于40 ms。
数码管越多,每个数码管的显示时间越短,同时还要考虑为CPU留出空闲时间。
在驱动电流一定的情况下,亮度越低,正因如此,要适当增大驱动电流。
对比:静态显示驱动:各显示器在显示过程中持续得到送显信号,与各显示器接口的I/O口线是专用的。
动态显示驱动:各显示器在显示过程中轮流得到送显信号,与各显示器接口的I/O口线是共用的。
静态显示驱动特点:无闪烁,无须扫描,节省CPU时间,编程简单,用元器件多,占I/O线多。
单片机驱动数码管电路

单片机驱动数码管电路数码管是一种常见的电子显示器件,它可以显示数字、字母和其他特殊字符。
而单片机作为一种集成电路,能够通过编程来控制外部设备的工作,因此可以很方便地用来驱动数码管。
本文将介绍单片机驱动数码管电路的原理和实现方法。
一、数码管的工作原理数码管由若干个发光二极管(LED)组成,每个发光二极管都有两个引脚:一个是正极,用于接收电流;另一个是负极,用于接收控制信号。
数码管通常分为共阳极和共阴极两种类型。
共阳极数码管的正极连接在Vcc(正电源)上,负极通过控制信号接地。
当控制信号接地时,相应的发光二极管会亮起;当控制信号断开连接时,相应的发光二极管会熄灭。
通过控制不同的发光二极管,可以显示不同的数字或字符。
共阴极数码管与共阳极数码管相反,正极通过控制信号接地,负极连接在Vcc上。
二、单片机驱动数码管的原理单片机可以通过IO口输出高低电平来控制数码管的工作。
以共阳极数码管为例,当IO口输出高电平时,相应的数码管发光二极管亮起;当IO口输出低电平时,相应的数码管发光二极管熄灭。
为了实现多位数码管的显示,通常需要使用译码器。
译码器可以将单片机输出的数字信号转换为对应的控制信号,从而实现对数码管的驱动。
常用的译码器有BCD译码器和数码管驱动IC等。
三、单片机驱动数码管的实现方法1. 硬件连接将单片机的IO口与数码管的控制引脚连接。
通过接线将单片机的IO口与译码器的输入引脚相连,然后将译码器的输出引脚与数码管的控制引脚相连。
同时,将数码管的电源引脚与电源连接,确保正极连接在Vcc上,负极连接在GND上。
2. 编程控制在编程时,首先需要定义数码管显示的内容。
可以使用数组或变量来存储需要显示的数字或字符。
然后,将需要显示的内容转换为对应的译码器输入信号,通过单片机的IO口输出给译码器。
最后,通过循环控制,不断更新数码管的显示内容,实现动态显示效果。
四、总结通过单片机驱动数码管电路,可以实现对数码管的灵活控制。
Linux数码管驱动详细过程

嵌入式Linux系统系列培训基于JXARM9-2410-1实验嵌入式Linux中驱动程序的编写(静态加载方式,模块(动态)加载方式)与应用程序开发。
分5个步骤:①数码管驱动程序seg和应用程序segtest编译;②修改驱动程序seg虚拟地址空间――smdk.c;③(静态或动态)加载驱动程序seg到linux内核(zImage);④修改文件系统Ramdisk.gz,将应用程序segtest加入其中;⑤下载linux内核和文件系统,并自动运行应用程序运行。
一、在Linux下编译驱动程序,以学习机上的数码管显示驱动Seg应用程序为例。
数码管显示驱动和应用程序包括seg.h,seg.c,segtest.c,segc四个文件,其中seg.h,seg.c是驱动程序,segtest.c是调用驱动的应用程序,segc是编译文件。
DEVICE_NAME: “char_dev”(seg.c定义)MAJOR_NUM: 96 (seg.h定义)DEVICE_FILE_NAME: “seg”(seg.h定义)1.将WinXP下的seg目录下的四个文件复制到VMware中的linux中的/home/cvtech/jx2410/examples/seg目录下。
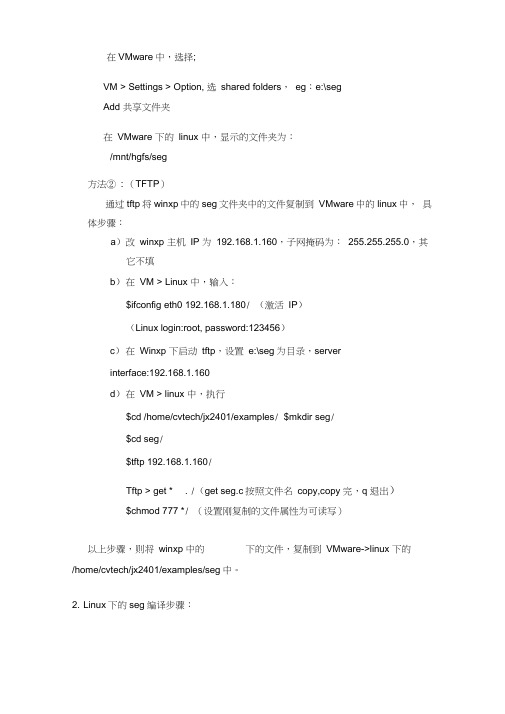
采用两种方法将winxp中的文件夹映射到VMware中的linux系统中。
方法①:(共享目录)在VMware中,选择;VM > Settings > Option, 选shared folders,eg:e:\segAdd共享文件夹在VMware下的linux中,显示的文件夹为:/mnt/hgfs/seg方法②: (TFTP)通过tftp将winxp中的seg文件夹中的文件复制到VMware中的linux中,具体步骤:a)改winxp 主机IP为192.168.1.160,子网掩码为:255.255.255.0,其它不填b)在VM > Linux 中,输入:$ifconfig eth0 192.168.1.180↙ (激活IP)(Linux login:root, password:123456)c)在Winxp下启动tftp,设置e:\seg为目录,server interface:192.168.1.160d)在VM > linux中,执行$cd /home/cvtech/jx2401/examples↙$mkdir seg↙$cd seg↙$tftp 192.168.1.160↙Tftp > get * . ↙(get seg.c按照文件名copy,copy完,q退出)$chmod 777 *↙(设置刚复制的文件属性为可读写)以上步骤,则将winxp中的E:\seg\下的文件,复制到VMware->linux下的/home/cvtech/jx2401/examples/seg中。
CH451数码管驱动及键盘控制芯片手册说明书
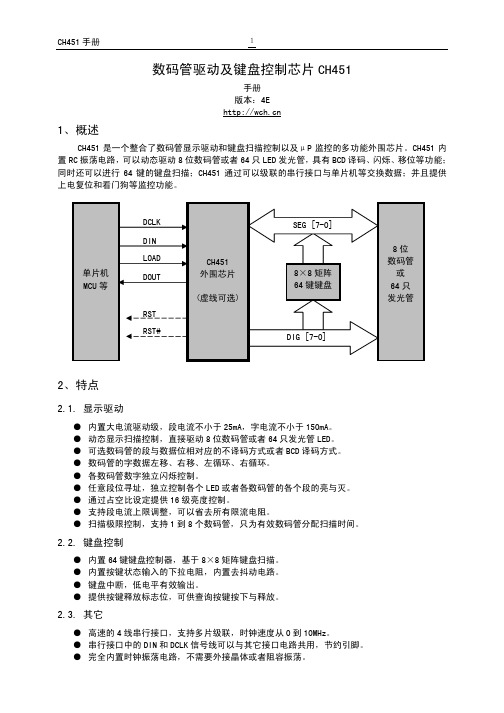
数码管驱动及键盘控制芯片CH451手册版本:4E1、概述CH451是一个整合了数码管显示驱动和键盘扫描控制以及μP监控的多功能外围芯片。
CH451内置RC振荡电路,可以动态驱动8位数码管或者64只LED发光管,具有BCD译码、闪烁、移位等功能;同时还可以进行64键的键盘扫描;CH451通过可以级联的串行接口与单片机等交换数据;并且提供上电复位和看门狗等监控功能。
2、特点2.1. 显示驱动●内置大电流驱动级,段电流不小于25mA,字电流不小于150mA。
●动态显示扫描控制,直接驱动8位数码管或者64只发光管LED。
●可选数码管的段与数据位相对应的不译码方式或者BCD译码方式。
●数码管的字数据左移、右移、左循环、右循环。
●各数码管数字独立闪烁控制。
●任意段位寻址,独立控制各个LED或者各数码管的各个段的亮与灭。
●通过占空比设定提供16级亮度控制。
●支持段电流上限调整,可以省去所有限流电阻。
●扫描极限控制,支持1到8个数码管,只为有效数码管分配扫描时间。
2.2. 键盘控制●内置64键键盘控制器,基于8×8矩阵键盘扫描。
●内置按键状态输入的下拉电阻,内置去抖动电路。
●键盘中断,低电平有效输出。
●提供按键释放标志位,可供查询按键按下与释放。
2.3. 其它●高速的4线串行接口,支持多片级联,时钟速度从0到10MHz。
●串行接口中的DIN和DCLK信号线可以与其它接口电路共用,节约引脚。
●完全内置时钟振荡电路,不需要外接晶体或者阻容振荡。
●内置上电复位和看门狗Watch-Dog,提供高电平有效和低电平有效复位输出。
●支持低功耗睡眠,节约电能,可以被按键唤醒或者被命令操作唤醒。
●支持3V~5V电源电压。
●提供SOP28和DIP24S两种无铅封装,兼容RoHS。
●引脚及功能基本兼容4线接口方式的CH452芯片。
3、封装封装形式宽度引脚间距封装说明订货型号SOP28 7.62mm 300mil 1.27mm 50mil 标准的28脚贴片CH451S DIP24S 7.62mm 300mil 2.54mm 100mil 窄24脚双列直插CH451L 注:基于成本和供货周期等考虑,推荐用贴片封装。
单片机驱动数码管电路

单片机驱动数码管电路数码管是一种常见的显示器件,广泛应用于各种电子设备中。
为了实现对数码管的驱动,可以使用单片机来完成。
单片机是一种集成电路,内部集成了处理器、存储器和各种输入输出接口,能够完成各种控制任务。
数码管电路主要由数码管、电流限制电阻和单片机组成。
数码管是一种七段显示器,能够显示0~9的数字。
电流限制电阻用于控制数码管的亮度,通常选择合适的电阻使得数码管的亮度适中。
单片机则负责控制数码管的显示。
单片机通过输出高低电平信号来控制数码管的显示。
七段显示器的每一段都对应一个引脚,通过控制引脚的电平状态,就可以实现对数码管的控制。
单片机通过改变引脚的电平状态来控制数码管的显示内容。
单片机驱动数码管的原理如下:首先,单片机通过输出引脚的高低电平来控制数码管的每一段,通过控制引脚的电平状态,可以使某一段亮起或者熄灭。
然后,通过改变每一段的亮灭状态,可以实现对数字的显示。
例如,要显示数字1,就只需要点亮第二段,其他段熄灭即可。
同理,要显示其他数字,只需要点亮相应的段,其他段熄灭即可。
为了实现对数码管的驱动,需要编写相应的程序。
在程序中,需要定义每一段对应的引脚,并通过控制引脚的电平状态来控制数码管的显示。
同时,还需要定义每个数字对应的亮灭状态,通过改变亮灭状态来实现数字的显示。
例如,要显示数字0,需要点亮除了第三段之外的其他段,其他段熄灭。
通过改变每一段的亮灭状态,可以实现对数字的显示。
同时,还可以通过改变每一段的亮度来控制数码管的亮度。
通过改变电流限制电阻的值,可以改变流过数码管的电流大小,从而改变数码管的亮度。
在实际应用中,单片机驱动数码管的电路可以通过外部电路连接数码管和单片机。
通过合理设计电路连接方式,可以实现对多个数码管的驱动。
例如,可以通过复用引脚的方式,将多个数码管连接在一起,并通过单片机的输出引脚来控制每个数码管的显示内容。
总结起来,单片机驱动数码管的电路可以实现对数码管的显示控制。
简述数码管的驱动原理及应用

简述数码管的驱动原理及应用引言数码管是一种常见的数字显示设备,被广泛应用于各种计数和显示场景。
本文将简要介绍数码管的驱动原理以及常见的应用场景。
数码管的驱动原理数码管其实是由多个LED(发光二极管)组成的。
根据不同的需要,数码管可以有不同的显示位数,一般可以分为4位、7位和8位数码管。
共阳极和共阴极数码管可以根据其“共阳极”和“共阴极”的不同,分为两种类型。
共阳极的数码管是将阳极连接在一起,而共阴极的数码管则将阴极连接在一起。
驱动电路数码管需要配合驱动电路来进行工作,这些驱动电路可以是芯片集成电路或离散电路。
驱动电路的作用是提供适当的电流和电压来驱动数码管的LED。
译码器和显示驱动IC常见的数码管译码器和显示驱动IC可以大大简化数码管的驱动工作。
这些芯片可以将数字信号转换为特定的数码管驱动信号,从而实现数码管的数字显示功能。
驱动原理在驱动数码管时,可以通过依次对每一位数码管进行电平控制来实现动态显示。
即通过快速切换每一位数码管的亮与暗来形成连续显示的效果。
通过适当的电平变换和脉冲宽度调节,可以实现数码管的亮度和显示效果的控制。
数码管的应用数码管作为一种常见的数字显示设备,广泛应用于各种场景。
时钟和计数器数码管作为时钟和计数器的核心部件,可以用于显示时间、测量时间间隔,以及进行数字计数等功能。
在家庭和工业应用中,时钟和计数器是数码管最常见的应用之一。
仪器仪表数码管也经常用于各种仪器仪表,如温度计、电压表、电流表等。
通过数码管的显示,可以直观地观测物理量的数值。
电子游戏数码管也常用于电子游戏中的得分显示、时间显示等功能。
数码管的鲜艳亮丽的颜色和动态显示效果使得电子游戏有更好的用户体验。
玩具数码管还广泛应用于各类玩具中。
比如说迷宫、数独、抽奖机等玩具经常使用数码管来进行数字显示。
总结数码管是一种广泛使用于数字显示的设备,其驱动原理简单易懂。
通过了解数码管的驱动原理,我们可以更好地理解数码管的工作原理和应用场景。
Linux数码管驱动详细过程
嵌入式Linux系统系列培训基于JXARM9-2410-1 实验嵌入式Linux中驱动程序的编写(静态加载方式,模块(动态)加载方式)与应用程序开发。
分5个步骤:①数码管驱动程序seg和应用程序segtest编译;②修改驱动程序seg虚拟地址空间---- smdk.c;③(静态或动态)加载驱动程序seg到linux内核(zlmage);④修改文件系统Ramdisk.gz,将应用程序segtest加入其中;⑤下载linux内核和文件系统,并自动运行应用程序运行。
一、在Linux下编译驱动程序,以学习机上的数码管显示驱动Seg应用程序为例。
数码管显示驱动和应用程序包括seg.h, seg.c, segtest.c segc四个文件,其中seg.h, seg.c是驱动程序,segtest.c是调用驱动的应用程序,segc是编译文件。
DEVICE_NAME: char_deV' (seg.c 定义)MAJOR_NUM: 96 (seg.h 定义)DEVICE_FILE_NAME: seg' (seg.h 定义)1. 将WinXP下的seg目录下的四个文件复制到VMware中的linux中的/home/cvtech/jx2410/examples/seg 目录下。
采用两种方法将winxp中的文件夹映射到VMware中的linux系统中。
方法①:(共享目录)在VMware中,选择;VM > Settings > Option, 选shared folders,eg:e:\segAdd 共享文件夹在VMware 下的linux 中,显示的文件夹为:/mnt/hgfs/seg方法② : (TFTP)通过tftp将winxp中的seg文件夹中的文件复制到VMware中的linux中,具体步骤:a)改winxp 主机IP 为192.168.1.160,子网掩码为:255.255.255.0,其它不填b)在VM > Linux 中,输入:$ifconfig eth0 192.168.1.180/ (激活IP)(Linux login:root, password:123456)c)在Winxp 下启动tftp,设置e:\seg为目录,serverinterface:192.168.1.160d)在VM > linux 中,执行$cd /home/cvtech/jx2401/examples/ $mkdir seg/$cd seg/$tftp 192.168.1.160/Tftp > get * . /(get seg.c按照文件名copy,copy 完,q 退出)$chmod 777 */ (设置刚复制的文件属性为可读写)以上步骤,则将winxp 中的下的文件,复制到VMware->linux 下的/home/cvtech/jx2401/examples/seg中。
细说多位数码管的驱动方法
细说多位数码管的驱动方法我们在制作项目时,会遇到多位数码管的显示问题.如何尽量减少硬件的使用数量和加快全部显示一轮的时间,是需要精心规划与安排的. 例如:做万年历,就有年月日,时分,星期等内容需要显示,数码管数量多达 13 位以上.如果再带上秒,温度,农历什么的,位数就更多了.例如:做多功能电力仪表,显示位数也往往多达十几位以上.尽管有专门用于这种多位显示的专门芯片可供选择,但是,往往一只这种芯片成本可能比使用的单片机本身还要高!例如市场上的 CH451 等,高达 6~8 元呢!于是,可以考虑串行到并行的一些芯片,例如 HC164,HC595 等等,驱动也仅仅就二线制,但是,这么一来,外挂芯片也不少.还有,可以使用一些 4 线到 7 线的驱动芯片,例如:CD4511,74LS247,CD4543 等等,它们除了节省一些源驱动引脚之外,使用数量恐怕也让人头痛!类似于 HC373,HC374,HC573,HC574 的芯片,可以减少很多源驱动引脚,但是,芯片使用数量仍然太多!还有一个附带问题,许多仪器仪表,往往是主印刷版与前面的显示/按键板是分离的,有些商品仪表,主板到前面板的引线就多达几十根,无论如何,都会让人感觉又乱有多又不可靠,生产调试等都增加了困难.说了那么多,我们就是希望:使用尽量少的硬件芯片,尽量少的过渡引线,尽量短的显示周期时间,尽量低的元器件费用!----当然,需要保证可靠性不能降低!我们举例说明:一个 2 * 4 位的仪器显示电路,有 8 位数码管,完全依靠单片机本身的端口来驱动,就有 2 种方案考虑:图 1 的方法需要使用 22 个单片机端口.图 2 方法需要使用 16 个单片机端口.图 2 全部数码管显示一次的时间比图 1 长一半时间.从仪器 2 个板子分离的情况来看,图 1 从主板到前面显示板的引线就相当多了!图 2 虽然少了一些,但是,加上供电,按键等,数量也不算少,很可能还会有发光管指示灯什么的,需要考虑的麻烦事就更多了!从单片机端口的使用数量来看,它也大大影响到单片机的封装选择,引脚不是越大越好的,对焊接,成本,调试等都会有影响.如果芯片带有 RS232 硬件功能,当然可以考虑使用串行驱动,虽然不过分影响单片机分时工作的速率,但是,上面提到过,串行芯片的数量也是相当可观的.数码管这种显示还要保证每秒不能少于 50 次以上,否则会有显示闪烁的感觉!针对上面提及的问题,这里推荐一种比较好的方法:就是增加一只廉价的单片机,专门负责显示,主功能单片机与显示用途单片机仅仅 2 根引线就可以正常传送信号,这么一来,带来的后果是利大于弊!我们这么做,还会最大限度地节省 2 个分离印刷板的引线,节省印刷板的布线难度,减少主单片机的引脚数量,加快系统的运行速率.对显示用途的单片机的内部资源没有什么要求,完全可以使用最普通功能的单片机来担任显示任务!这样就需要解决 2 个单片机之间的通信问题,这完全可以借鉴现成的一些 2 线制串行通信方式方法.也可以根据自己的情况自定义自己的通信方法.通常,主单片机只要保证每秒时间给显示单片机送入 4 次以上的数据,那么,对数码管显示的实时性来说就已经足够了!----当然,你就是增加一倍二倍的传送次数,对主单片机来说,也是可以非常轻易做到了!因为,它犯不上去操心每秒显示 50 次以上的工作量了!而对于显示单片机来说,则要求保证每秒时间内,完成全部数码管的 50 次以上的分时扫描显示.....而对于显示单片机来说,则要求保证每秒时间内,完成全部数码管的 50 次以上的分时扫描显示.....下面通过一个具体例子来说明.图3 电路使用 SN8P2624 芯片,它与 EM78P447,PIC16C57 等芯片引脚排列兼容!而且价格低廉.图3 电路除了预留 2 个端口作为数据通信之外,其余全部端口都用于数码管的显示.可以驱动 2*6 位数码管.笔段使用并行方式驱动,速度是最快的!图4 电路除了预留 2 个端口作为数据通信之外,还预留一个端口用于检测 5V 掉电,其余全部端口都用于数码管的显示.可以驱动 2*5 位数码管.笔段使用并行方式驱动,速度是最快的!如果仅仅驱动 2*4 位数码管,那么,其中一次驱动就可以成为 16 个状态指示灯的发光管驱动.非常适合大部分仪器仪表电路使用.预留的通信接口都具有外部中断功能,可以很方便地使用中断方式来响应主单片机的数据传送.由于这种单片机为 OTP 类型,一旦烧写后就不能更改了,因此,需要很好的考虑需要显示的各种各样的内容.同时,还要考虑主单片机传送数据时,到底是传送原始数据还是传送笔段数据.如果传送原始数据,那么,可以减少数据的传送量.原始数据由显示芯片自行分解到笔段数据.但是有可能出现显示数据没有考虑到的显示内容而无法显示.如果是传送笔段数据,则由主单片机预先进行 HEX 到 BIN 的转换,然后再进行传送.这种方案会增加数据的传送量.但是不用担心显示数据没有考虑到的显示内容无法显示.因此,采用哪一种数据进行传送,需要精心考虑和预先安排好!当然,一个 7 段数码管,能够显示的字符样式毕竟有限,只要把所有可能的字符都考虑周到,就无需担心会有不能显示的内容了.因此,推荐传送数据直接使用原始数据,由显示单片机自行进行 HEX 到 BIN 的转换,因为显示用途的单片机实际没有什么更多的事情可做.如此一来,对于那些具有前后板结构的仪器仪表来说,2 个分离的板子的连接线就一律减少到仅仅剩下 2 条线路了.这个改进对许多厂家来说是具有实际意义的!那么,增加一只单片机是否会对硬件成本有较大的影响呢? 没有的.它仅仅是把一个多引脚的单片机变成 2 个少引脚的单片机而已.而且,担任显示用途的单片机由于无需特殊功能,可以选择比主单片机更加廉价的型号.虽然不能说是完完全全划等号.可是,对于批量使用的企业来说,它又变成了一个通用部件,完完全全可以仅仅更换一个主板就获得另外一款品种.这是不是也很划算呢?这是实际项目使用的面板,驱动 4*3位数码管和 5 个工作状态发光管指示灯.。
共阴极七段数码管的驱动

共阴极七段数码管的驱动共阴极七段数码管是一种常见的显示器件,在各行业中广泛应用。
其原理是通过对不同的阴极进行通断控制,使显示器显示出不同的数字或字母。
本文将介绍如何驱动共阴极七段数码管。
第一步:基本部件准备驱动共阴极七段数码管需要一些基本的部件,其中包括Arduino 开发板、面包板、七段数码管、电阻等。
要进行正确的驱动,首先需要按照电路图连接好这些部件。
第二步:代码编写在连接好以上部件之后,需要写出相应的代码来驱动七段数码管。
以下代码可以实现数字0~9的显示。
```void setup(){pinMode(2, OUTPUT);pinMode(3, OUTPUT);pinMode(4, OUTPUT);pinMode(5, OUTPUT);pinMode(6, OUTPUT);pinMode(7, OUTPUT);pinMode(8, OUTPUT);}void loop(){digitalWrite(2, LOW);digitalWrite(3, LOW);digitalWrite(4, LOW);digitalWrite(5, LOW);digitalWrite(7, LOW);digitalWrite(8, LOW);digitalWrite(2, HIGH); digitalWrite(3, HIGH);digitalWrite(4, HIGH);digitalWrite(5, HIGH);digitalWrite(6, HIGH);digitalWrite(7, HIGH);digitalWrite(8, HIGH);// 显示数字0digitalWrite(2, LOW);digitalWrite(3, LOW);digitalWrite(4, LOW);digitalWrite(5, LOW);digitalWrite(6, LOW);digitalWrite(7, LOW);digitalWrite(8, HIGH);delay(2000);// 显示数字1digitalWrite(2, HIGH);digitalWrite(3, LOW);digitalWrite(4, LOW);digitalWrite(5, HIGH);digitalWrite(6, HIGH);digitalWrite(7, HIGH);digitalWrite(8, HIGH);delay(2000);// 显示数字2digitalWrite(2, LOW);digitalWrite(3, LOW);digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, HIGH); digitalWrite(8, LOW);delay(2000);// 显示数字3digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, HIGH); digitalWrite(7, HIGH); digitalWrite(8, LOW);delay(2000);// 显示数字4digitalWrite(2, HIGH); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, HIGH); digitalWrite(6, HIGH); digitalWrite(7, LOW); digitalWrite(8, LOW);delay(2000);// 显示数字5digitalWrite(2, LOW); digitalWrite(3, HIGH); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, HIGH); digitalWrite(7, LOW);delay(2000);// 显示数字6digitalWrite(2, LOW); digitalWrite(3, HIGH); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(8, LOW);delay(2000);// 显示数字7digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, HIGH); digitalWrite(6, HIGH); digitalWrite(7, HIGH); digitalWrite(8, HIGH);delay(2000);// 显示数字8digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); digitalWrite(8, LOW);delay(2000);// 显示数字9digitalWrite(2, LOW);digitalWrite(4, LOW);digitalWrite(5, HIGH);digitalWrite(6, HIGH);digitalWrite(7, LOW);digitalWrite(8, LOW);delay(2000);}```第三步:运行测试将写好的代码上传到Arduino开发板,让其运行,可以看到七段数码管上显示数字0~9,每个数字停留2秒钟。
4位数码管驱动芯片

4位数码管驱动芯片4位数码管驱动芯片是一种集成电路芯片,用于控制和驱动四位数码管显示器。
它通常包含多个功能模块,如扫描驱动、段选驱动、亮度调节等,以完成对数码管显示的控制。
4位数码管驱动芯片的核心功能是实现对4个数码管的控制和驱动。
它往往具备以下特点和功能:1. 扫描驱动:可以通过扫描方式实现对多位数码管的驱动。
通过扫描驱动的方式,可以轮流控制每个数码管的选通,从而实现多位数码管的显示。
2. 段选驱动:对于每个数码管的每个段(例如A、B、C、D、E、F、G等),能够通过相应控制信号的输入,实现对特定段的亮灭控制。
这样可以根据需要显示不同的数字、字母或符号。
3. 亮度调节:可以通过外部控制信号,调节数码管的亮度。
通常使用PWM(脉冲宽度调制)技术来实现亮度的调节。
4. 时钟控制:数码管的刷新速度需要一个时钟信号来驱动,4位数码管驱动芯片可以内部产生相应的时钟信号,也可以通过外部输入时钟信号来控制。
5. 输入控制:芯片通常提供多个输入引脚,用以接收外部控制信号,实现对数码管的控制和显示。
6. 常用功能和显示模式支持:该芯片通常支持常用的显示模式,例如静态显示模式、动态扫描显示模式、按键扫描模式等,以满足不同场景下的需求。
7. 多数字管级联:该芯片通常支持多位数码管的级联。
通过级联,可以按照需要来扩展显示位数,并通过芯片的控制实现对多位数码管的统一控制。
总之,4位数码管驱动芯片是一种专门用于控制和驱动4位数码管显示器的集成电路芯片。
它具备扫描驱动、段选驱动、亮度调节、时钟控制以及常用功能和显示模式支持等功能,可以满足各种场景下的数码管显示需求。