ROS(RouterOS)2.9.7超详细安装教程
ROS软路由详细教程
ROS软路由详细教程ROS(RouterOS)是一种基于Linux内核开发的软路由操作系统,具有丰富的功能和灵活的配置选项。
在本教程中,我将为您提供一个详细的ROS软路由配置教程。
2.连接到ROS路由器3.配置基本设置在登录网页中,输入用户名和密码(默认情况下为“admin”)。
然后,选择“IP”选项卡,并选择“Addresses”子选项卡。
在这里,您可以配置路由器的IP地址、网关和子网掩码。
4.配置网络接口在“Interfaces”子选项卡中,您可以配置网络接口的设置。
首先,选择您要配置的接口,然后为其分配IP地址、设置网关和DHCP选项等。
5.配置DHCP服务器在“IP”选项卡中,选择“DHCP”子选项卡。
在这里,您可以启用和配置DHCP服务器,为连接到路由器的设备分配IP地址和其他网络参数。
6.配置防火墙在“IP”选项卡中,选择“Firewall”子选项卡。
您可以使用防火墙规则来管理网络流量并保护您的网络安全。
可以添加规则以阻止或允许特定IP地址、端口或协议的流量。
7.配置NAT在“IP”选项卡中,选择“NAT”子选项卡。
在这里,您可以配置网络地址转换(NAT)规则,以允许内部网络中的设备访问Internet,并且可以将特定的端口映射到特定的内部IP地址。
8.配置无线网络在“无线”选项卡中,您可以配置无线接口和无线网络的设置。
您可以为无线接口分配一个唯一的名称,选择您喜欢的频率和信道,并配置无线安全性选项(如WPA2-PSK)。
9.配置VPN在“IP”选项卡中,选择“VPN”子选项卡。
在这里,您可以配置各种VPN(Virtual Private Network)协议,如PPTP、L2TP和OpenVPN,以创建安全的远程访问链接。
10.配置路由在“IP”选项卡中,选择“Routes”子选项卡。
在这里,您可以添加和管理路由,以确定数据包的最佳路径。
您可以添加静态路由,也可以使用动态路由协议如OSPF(Open Shortest Path First)。
routerOS安装教程

routerOS安装教程Routeros 安装过程教程准备工作硬件准备:双网卡计算机一台(用来安装ros)具有操作系统的计算机一台(用来设置ros的客户机)U盘(建议2G以上)软件准备软碟通utriso (写iso文件到U盘)Routeros 安装文件(二者可选一)1routeros 光盘2routeros 硬盘镜像写硬盘镜像程序diskimg (选择硬盘镜像安装必须软件)winpe光盘镜像(选择硬盘镜像安装必须软件)Winbox (设置routeros的客户端程序)注意:安装过程方式一(U盘大于1G)一制作winpe U盘启动(已有winpe系统的启动盘的可跳过本步骤)1 运行软碟通utriso软件(目录文件夹下)2 文件——打开——选择winpe.iso (目录文件夹下)3 启动——写入硬盘镜像4 选取U盘其他默认(注意有时间或有usb等字样的一般是usb设备,千万别选错)5 写入等待写入结束(颜色条走动完成)百度搜索软碟通制作U盘启动二复制下列文件至u盘(routeros5.25-winpe安装文件夹下)ROS5.25-1G.img (解压ROS5.25-1G自动破解后的文件夹内)Diskimg.exe 程序三u盘启动winpe设置u盘启动四运行diskimg 程序安装img 镜像1 第一次运行点yes2 默认writeimage 选项卡选择physical Disk注意: 是整个磁盘的, 不是某一个分区.3点击Browse选择镜像文件ROS5.25-1G.img4重新启动完成安装方式二(刻光盘或参照下列过程启动)一软碟通写router os 5.20.iso 文件1 运行软碟通utriso软件(目录文件夹下)2 文件——打开——选择winpe.iso (目录文件夹下)3 启动——写入硬盘镜像4 选取U盘其他默认(注意有时间或有usb等字样的一般是usb设备,千万别选错)5 写入等待写入结束(颜色条走动完成)百度搜索软碟通制作U 盘启动二u盘启动router os 5.20设置u盘启动三开始安装过程参考赵和二中的安装过程。
RouterOS 2.9安装及设置(图文格式)
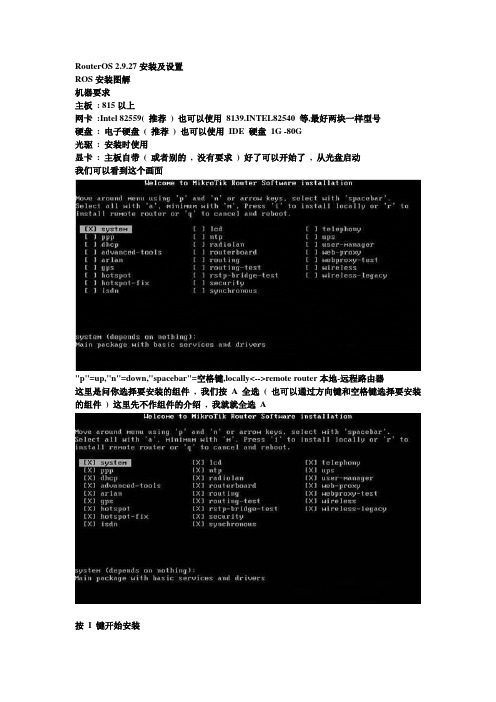
RouterOS 2.9.27安装及设置ROS安装图解机器要求主板: 815以上网卡:Intel 82559( 推荐) 也可以使用8139.INTEL82540 等,最好两块一样型号硬盘: 电子硬盘( 推荐) 也可以使用IDE 硬盘1G -80G光驱: 安装时使用显卡: 主板自带( 或者别的, 没有要求) 好了可以开始了, 从光盘启动我们可以看到这个画面"p"=up,"n"=down,"spacebar"=空格键,locally<-->remote router本地-远程路由器这里是问你选择要安装的组件, 我们按 A 全选( 也可以通过方向键和空格键选择要安装的组件) 这里先不作组件的介绍, 我就就全选 A按I 键开始安装会有一个提示Do you want to keep old configuration? [y/n]:意思问你是否保持磁盘原有的格式, 这里我们选N, 不保留configuration|ju|=配置n接下来还有个提示,warning:all data on the disk will be erased!Continue? 选Yerased|i,ei|=擦掉,抹去正在格式化硬盘, 正在复制文件安装完成。
这个时候请取出光盘, 或调成从硬盘启动, 或者拆下光驱,ROS 就安装好了, 光驱不需要了,建议:取出光盘(最简洁,方便,安全的操作)按回车重启路由, 进入登录界面接上内网网线, 也可以直接也计算机对连ROS 下配制默认用户名:ADMIN 密码: 空登录成功会有一个提示Do you want to see the software license? [y/n]:意思是问你是否要看ROS 使用说明和服务条款, 都是 E 文的, 如果你想看的话选Y, 这里我就不看了选N 跳过直接进入我们关键的IP 配制关键步骤然后输入int,进入interface命令行,输入print查看网卡是否启用,默认是启用的,标志是网卡名字前面显示R,比如我的网卡ether1前面显示R。
ROS图文安装介绍教程
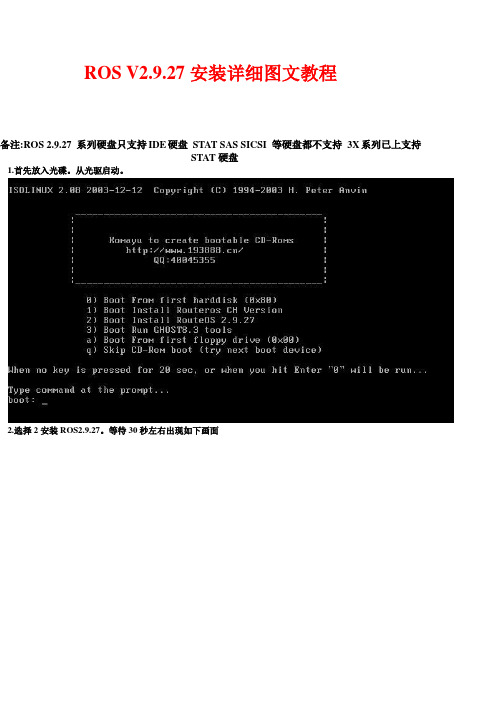
ROS V2.9.27安装详细图文教程备注:ROS 2.9.27 系列硬盘只支持IDE硬盘STAT SAS SICSI 等硬盘都不支持3X系列已上支持STAT硬盘1.首先放入光碟。
从光驱启动。
2.选择2安装ROS2.9.27。
等待30秒左右出现如下画面3.然后键盘按A 图如下4.在按键盘“I”图如下提示按Y确定,再按n不保存旧配置。
5.继续按Y不保存旧的配置6.提示是否安装并自动格式化硬盘继续按键盘“Y”就开始安装系统了7.安装完成后提示按ENTER 回车从新启动系统从新启动系统上来输入默认账号admin密码为空会出现如下图提示按Y观看ROS相关信息。
按N取消。
按N继续8.然后输入Internet pri 查看网卡。
看2快网卡识别到了没有。
9.上图可见。
已经成功识别到2快网卡了。
下面输入setup 进行安装。
10.然后继续按A 设置新的IP地址和网关。
11.继续按A 设定新的IP地址12.提示设置ether1网卡IP 若想设置另外快网卡。
直接把ether1 改ether2 然后敲回车即可。
我进行第一块网卡配置。
图片如下13.提示输入新的IP地址和子网掩码。
输入内网IP地址和子网掩码。
例子内网网关伟192.168.30.220 子网掩码为255.255.255.0 则输入192.168.30.220/255.255.255.014.会提示你设置网关地址。
由于内网ROS的IP就是客户机的网管。
所以一般内网网管可以无需设置、按X 退出15.继续按X退出16. 然后继续用WINBOX管理器连接。
接下来的配置全在WINBOX里操作完成。
在IE浏览器上输入http://192.168.30.220/17.点击Download 下载WINBOX下载到本地并运行输入服务器IP地址和默认账号admin 密码为空18.敲回车进行连接19.然后点击IP-address list输入电信或者网通提供给你的IP地址和子网掩码Interface 那里选ether2 是设置第二块网卡IP。
ROS2.9.7双线教程,网吧里用的

(原创)本人做的ROS2.9.7双线(网通和电信)教程,网吧里用的!新手们可以过来看看!安装前,要准备好光驱,ROS2.97光盘,最好还要有下载好的WINBOX(下面有解释)。
首先声名,我做的时候没有抓图,所以有的图是从网上找的,所以说有的图不是我的!因为我这儿是双线,所以用了三个网卡(inter1000M)的,硬盘要接在IDE0上面,并且作为主盘MASTER,否则ROS不能正常启动。
光驱随便。
用安装光盘启动后,如下图1按i后,进入安装界面选择需要安装的package,如下图2我这里是按A(全选),再按i安装,y确定,再按n不保存旧配置。
这时开始分区安装package,最后回车重新启动,重新启动后又出现如图1:这时要选启动菜单中的C,进行ROS2.97的破解。
破解后如下图3按Y,后,把2。
97的光盘取出来,ROS启动后如下图4用户名是admin 密码为空这样就可以进入ROS了。
接着我们用interface pri 命令,可以显示出你现在可用的网卡。
如下图5再输入ip address 接着add address=192.168.0.254/24 inter=ether1设置ether1为内网的网卡,其中192..168.0.254/24是添自己的内网IP ,设置成功没有提示,可以用pri查看。
下面我用WINBOX来设置ROS(不知道为什么,我设ether1为内网卡,可是网线接在了显卡往下数的第一块网卡上,就是不通,后来我接在了第二块网卡才通了,说明第二块网卡是ether1,所以你要多试试,接在哪个网卡通,那个就是内网卡了,别的两个网卡先不要接线。
)在局域网其他机器(此机的IP要和你的ROS内网卡IP同一网段)IE浏览器输入:http://192.168.0.254进入WEBBOX,左边可以下载WINBOX,但是我做的时候,打开什么也没显示。
所以我用安装前下载好的WINBOX。
打开WINBOX输入IP和用户名连接,如下图6点连接,进入配置界面:点左侧的Interface.我这里ROS是正用着,所以三个网卡都有流量,如果你们做的话,此时只接一个内网卡,所以有流量的就是内网卡了,把它的名字改成lan ,别的不用动。
RouterOS软路由安装及配置

RouterOS 软路由安装与设置一、版本选择推荐安装RouterOS 2.9.2.7或者RouterOS 3.2选择理由:以上版本都是比较稳定的,根据自己的硬件配置和需要选择。
如果硬件配置较低请选择二、系统安装1、基本安装过程如下:根据需要选择安装组件,如果没有正确选择,也可在以后使用过程中添加或删除组件。
用TAB键移动选项,用空格键确定选择,按I键开始安装。
不保留原有配置,硬盘上的所有数据被删除,重建分区并格式化后开始安装,完成后按ENTER重新启动机器。
启动完成后的界面。
2、组件的添加和删除(参考后面的安装DHCP和PPP组件过程)三、IP地址设置这里用setup进行配置,也可用其他方式进行。
输入a,输入IP地址,格式如:;输入g,设置默认网关地址。
设置IP和网关完成后的界面。
四、Winbox的设置输入网卡的IP地址,登录到ROS。
下载Winbox,输入ROS的IP地址、用户名和密码登录到Winbox。
如下图:登录winbox,填写IP、用户名和密码。
登录到ros的winbox界面。
四、路由设置为了管理方便,我们可以把网卡接口名称做修改。
如:内网卡为LAN,外网卡为WAN。
相应的IP地址也做了修改。
在IP--Routes中,设置路由,即网关地址。
五、NAT设置选择IP--Firewall,添加一条NAT规则。
做源地址srcnat的地址欺骗maquerade。
也可以指定源地址和输出接口,如源地址:,输出接口:WAN。
这样一条新建的NAT规则就建好了。
六、DNS缓存安装DNS缓存以后,可一定程度上提高客户机的访问速度,如果ROS的硬盘不稳定也可以不设置DNS缓存。
选择IP---DNS,设置主辅DNS地址,并选择“允许远程请求”,也可以适当更改缓存大小,范围为512--10240KiB。
添加一条静态DNS规则,填写内网卡地址。
七、DHCP和PPP组件的添加将ROS光盘中的相关文件dhcp- ,复制到ROS的FTP中。
ROS安装及配置教程
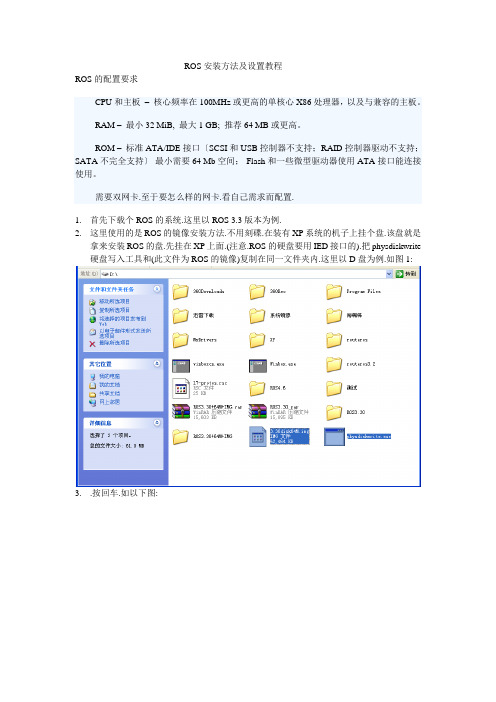
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
机器人操作系统ROS的安装与应用开发指南

机器人操作系统ROS 的安装与应用开发指南机器人操作系统(Robot Operating System,ROS) 是一个开源的、灵活的机器人软件平台,它被广泛应用于机器人研发领域。
ROS 提供了一系列的工具和库,帮助开发者构建机器人应用程序。
本文将为您介绍R OS 的安装方法和应用开发指南,帮助您快速入门ROS 的世界。
一、ROS 的安装方法1.确认操作系统:ROS 可以运行在多种操作系统上,包括Ubuntu、Debian、Fedora等。
确保您的操作系统版本符合ROS 的要求。
2.安装R OS: 您可以通过命令行或者G UI 的方式安装R OS 。
以Ubuntu 为例,可以使用以下命令安装ROS:1sudo apt-get updatesudo apt-get install ros-<distro>-desktop-full其中,<distro> 代表您所选择的ROS 版本,如Kinetic 、Melodic 等。
3.初始化R OS 环境:安装完成后,需要初始化ROS 环境。
可以通过以下命令完成初始化:source /opt/ros/<distro>/setup.bash4.配置ROS 工作空间:ROS 提供了工作空间(workspace) 的概念,方便用户组织和管理开发项目。
可以通过以下命令创建并配置工作空间:mkdir -p~/catkin_ws/srccd ~/catkin_ws/catkin_makesource devel/setup.bash\至此,R OS 的安装已经完成。
您可以通过运行命令r osversion -d`来验证R OS 版本。
二、R0S 应用开发指南1.创建R OS 程序包:在R OS 中,程序的基本单元是包(package)。
可以使用以下命令创建一个新的R OS 程序包:cd ~/catkin_ws/srccatkin_create_pkg <package_name>std_msgs rospy roscppV 1 V其中,<package_name> 代表您所创建的包的名称。
路由服务器ros2.927安装详解
路由服务器之Routeros2.927安装设置详解硬件准备:1、首先下载软路由的ghost硬盘版,如果没有,从/常用软件/路由服务/OS297.rar下载2、释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
3、将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机。
软件设置:1、开机,出现登陆提示。
用户:admin 密码:空2、输入setup再按两次A3、在ether1后先回车再输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)4、输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox 在图形界面下访问路由了。
5、关机,插上另一张网卡,这个是接外网的,即WAN,现在可以去掉软路由电脑的显示器和键盘了。
一、管理端winbox中文版的设置。
下载winbox中文版下载地址:/常用软件/路由服务/Winbox中文版.rar运行winbox以admin身份登陆1、实现NAT转发:IP-FIREWALL在NAT里点+,在ACTION里选masquerade2、绑定MAC地址(先将原拔号电脑的MAC地址抄下来)再点NEW Terminal 在光标处输入:INPTHETHPR(查看WAN前面是不是1)SET 1 MAC-ADDRESS=(你抄下的MAC地址)PR(查看WAN后面的MAC地址是不是你改的)如果变成了你改后的,绑定MAC地址就成功了。
3、设置DHCP地址分配。
IP-DHCP SERVER-SETUP-选LAN点NEXT-一直点下一步至完成。
4、添加自动拔号INTERFACES-点+号-PPPOE CLIENT-DIAL OUT在USER后面输入你宽带拔号的用户名,在PASSWORD后输入拔号的密码。
其他不要改。
ROS软路由详细最完整教程
ROS软路由详细最完整教程第二步:进行基本设置通过浏览器访问默认IP地址,并使用管理员用户名和密码登录。
进入系统后,首先进行基本设置。
首先设置设备的主机名和时区,然后进行LAN和WAN接口的配置。
配置WAN接口时,需要根据所提供的网络信息填写IP地址、子网掩码、默认网关和DNS服务器。
第三步:配置DHCP服务器在RouterOS中配置动态主机配置协议(DHCP)服务器,以便为局域网上的设备分配IP地址。
选择IP选项下的DHCP服务器,并进行基本配置,包括地址池、默认网关、DNS服务器和IP地址的分发。
第四步:设置NAT网络地址转换(NAT)是一种将私有IP地址转换为公共IP地址的技术,用于将内部网络与Internet连接起来。
在RouterOS中配置NAT规则,可以实现多个内部设备共享单个公共IP地址。
选择IP选项下的Firewall,然后选择NAT选项,进行配置。
添加源地址和目标地址,并将内网IP地址映射到公共IP地址。
第五步:设置防火墙规则使用防火墙能够保护网络免受未经授权的访问和恶意攻击。
在RouterOS中配置防火墙规则,可以控制流量的进出规则。
选择IP选项下的Firewall,然后选择Filter Rules选项,进行配置。
添加适当的规则,以允许或拒绝特定的IP地址、端口和协议。
第六步:配置VPN虚拟专用网络(VPN)可以在公共网络上创建私有、加密的链接。
在RouterOS中配置VPN,可以使远程用户能够安全地访问内部网络。
选择IP选项下的IPsec选项,进行VPN配置。
添加预共享密钥、远程PEER和IPv4子网。
第七步:配置无线网络如果使用无线网络连接,可以使用RouterOS进行无线配置。
选择无线网络选项,并进行配置,包括SSID、加密方式和密码。
第八步:监控和管理配置完成后,可以使用RouterOS提供的监控和管理工具来监视和管理网络。
其中包括网络流量监控、日志记录、远程访问和系统升级等。
最完善的Ros2.9.7安装版(包括备份还原)

一、Ros2.9.7安装版光盘起动1、先第二个,开始安装Router OS 2.97(instul routeros .......)2、选择一列1 2 4 二列7(最后一个) 三列5(web-....)3、然后按I,再按两次Y等一会提示你重启然后按回车4、还是光驱启动按C开始破解Router OS 2.975、提示你重启,按y6、拿出光盘等到,Mikrtik 2.9.7 mikrotik login:7、用户:admin密码:空的,什么都不要输依次输入:sys回车lic 回车pri回车你会看到:software-id: "123s-laa" upgradable-until:jan/01/2008level:6 features:extra-channels 等字样。
level:6 说明破解成功。
6级ISP级别输入:..回车..回车setup回车 a a 回车设一个IP如:192.168.0.254/24后面的24就是你的掩码。
也就是:255.255.255.0 子网掩码算法网上一大堆回车然后按两次xping 一下你的机子。
二、通过winbox等访问路由1、Interfaces (接口) 修改网卡名网卡改名(自己好认)如:ether1改为wan 外网ether2改为lan内网双击名字修改2、点击IP-Address ( IP- 地址)点+号第二块网卡启用增加一个IP地址,下面选第二张网卡,如果你改了哪就是选Lan 其中网络和广播不用自己填写3、IP-Routes(IP-路由)增加一个网关。
点击+号这个网关就是外网给你的哪个。
4、IP- Firewall (IP-防火墙)增加路由功能选择NAT点+号选择Action Action:选masquerade <路由的意思> OKMangle 点击+号(1)Genera(普通的)Chain:选择postrouting Protocol: 选择6(tcp)(2)点:Advanced (高级的)在下面TCP Flags TCP Lags选择syn(3)选择Action Action选择change MSS New TCP MSS:输入:1400 点击OK三、安全设置1、防二级代理在IP- Firewall (IP-防火墙)-Mangle 点+在Action(作用)标签action项选择:change TTL TTL ACTION项:选最后一个NEW TTL值:为1OK2、限速在SYSTEM-SCRIPTS (系统-脚本) 点+查看导入成功在Queues (队列)注:添加脚本后-要选中你所添加的脚本<如:限速>-点Run Script (运行脚本)3、ARP绑定IP-ARP项里IP前的D没了(表示绑定)ARP的另一个ROS设置,INTERFACE项里,内网网卡打开设置页,这里,一共四个选项,第一个关闭,第二个开放,第三个不知道,第四个锁定选择第四个锁定概念解释是:锁定该网内的MAC表,当有新的MAC进入该网的时候,阻止通过。
routerOS安装教程
Routeros 安装过程教程准备工作硬件准备:双网卡计算机一台(用来安装ros)具有操作系统的计算机一台(用来设置ros的客户机)U盘(建议2G以上)软件准备软碟通utriso (写iso文件到U盘)Routeros 安装文件(二者可选一)1routeros 光盘2routeros 硬盘镜像写硬盘镜像程序diskimg (选择硬盘镜像安装必须软件)winpe光盘镜像(选择硬盘镜像安装必须软件)Winbox (设置routeros的客户端程序)注意:安装过程方式一(U盘大于1G)一制作winpe U盘启动(已有winpe系统的启动盘的可跳过本步骤)1 运行软碟通utriso软件(目录文件夹下)2 文件——打开——选择winpe.iso (目录文件夹下)3 启动——写入硬盘镜像4 选取U盘其他默认(注意有时间或有usb等字样的一般是usb设备,千万别选错)5 写入等待写入结束(颜色条走动完成)百度搜索软碟通制作U盘启动二复制下列文件至u盘(routeros5.25-winpe安装文件夹下)ROS5.25-1G.img (解压ROS5.25-1G自动破解后的文件夹内)Diskimg.exe 程序三u盘启动winpe设置u盘启动四运行diskimg 程序安装img 镜像1 第一次运行点yes2 默认writeimage 选项卡选择physical Disk注意: 是整个磁盘的, 不是某一个分区.3点击Browse选择镜像文件ROS5.25-1G.img4重新启动完成安装方式二(刻光盘或参照下列过程启动)一软碟通写router os 5.20.iso 文件1 运行软碟通utriso软件(目录文件夹下)2 文件——打开——选择winpe.iso (目录文件夹下)3 启动——写入硬盘镜像4 选取U盘其他默认(注意有时间或有usb等字样的一般是usb设备,千万别选错)5 写入等待写入结束(颜色条走动完成)百度搜索软碟通制作U盘启动二u盘启动router os 5.20设置u盘启动三开始安装过程参考赵和二中的安装过程。
机器人操作系统ROS的安装与配置教程

机器人操作系统ROS的安装与配置教程机器人操作系统(Robot Operating System,ROS)是一个通用的机器人软件开发平台,提供了一系列的库和工具,方便开发者创建和运行机器人应用程序。
ROS的安装与配置是使用该平台的第一步,下面将详细介绍ROS的安装和配置教程。
1. 确认操作系统和硬件要求在开始安装ROS之前,需要确保你的操作系统符合要求。
ROS支持多种操作系统,包括Ubuntu、Fedora等。
此外,还需要确认你的硬件配置满足ROS的最低要求,如处理器、内存等。
2. 选择ROS版本并下载安装包ROS有多个版本可供选择,其中ROS Kinetic是目前最新的稳定版本。
访问ROS官方网站,选择与你的操作系统匹配的ROS版本,并按照指引下载对应的安装包。
3. 安装ROS下载安装包后,执行以下命令进行安装:```$ sudo apt-get update$ sudo apt-get install ros-<version>-desktop-full```请将上述命令中的`<version>`替换为你下载的ROS版本号,例如`kinetic`。
安装过程可能需要较长时间,请耐心等待。
4. 初始化ROS工作空间安装完成后,需要初始化ROS工作空间以便于开发和构建ROS的应用程序。
执行以下命令创建一个工作空间:```$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make```上述命令创建了一个名为`catkin_ws`的工作空间,并执行了编译操作。
在工作空间中,包含了`src`目录用于存放ROS的软件包。
5. 配置ROS环境为了能够正确地使用ROS,需要将ROS的环境变量配置到系统中。
执行以下命令将ROS的环境变量添加到`.bashrc`文件中:```$ echo "source /opt/ros/<version>/setup.bash" >> ~/.bashrc $ source ~/.bashrc```请将命令中的`<version>`替换为你安装的ROS版本号。
ros安装教程收集(非常详细的图文教程)
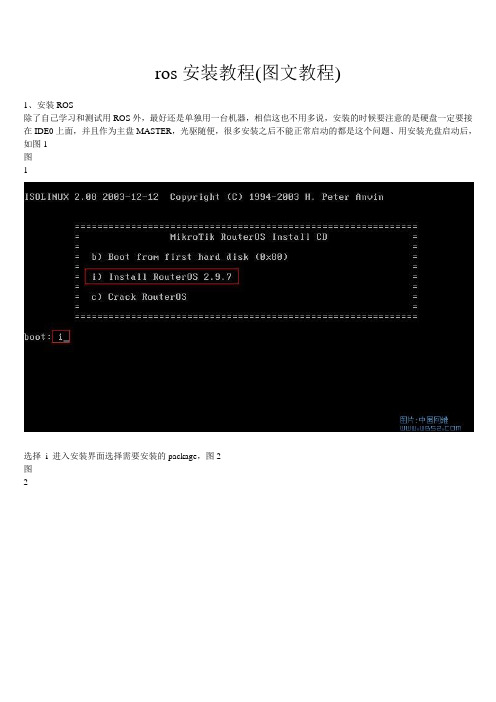
ros安装教程(图文教程)1、安装ROS除了自己学习和测试用ROS外,最好还是单独用一台机器,相信这也不用多说,安装的时候要注意的是硬盘一定要接在IDE0上面,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、用安装光盘启动后,如图1图1选择i 进入安装界面选择需要安装的package,图2图2选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进入ROS是未注册的版本,如图4 图4用光驱启动,在启动菜单按c破解,图5图5破解之后进入已经没有了未注册提示。
见图6图32、服务端配置/interface pri 能显示出你现在可用的网卡。
如图6 图6/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP,设置成功没有提示,可以用pri查看见图7图73、winbox配置(所有配置都在这里进行)在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输入IP和用户名连接(图8)图8进入配置界面(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红*部分是自动添加的.图10图10(3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信. 如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel图11(4)IP->FIREW ALL,NA T选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12图12(5) 上传路由表文件cnc.rsc,如图13图13在WINBOX中,NEW TERMINAL,输入import cnc完成.如图14 图14现在已经可以电信网通自动切换了.(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC文件到192.168.1.1,在NEW TERMINAL 里执行import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16至此,基本OK了.第一次写教程用了2个多小时呵呵..有什么不完整的地方欢迎大家补充,大家可以从本站下载ROS 2.9.6破解版。
ros2.927双线安装设置教程
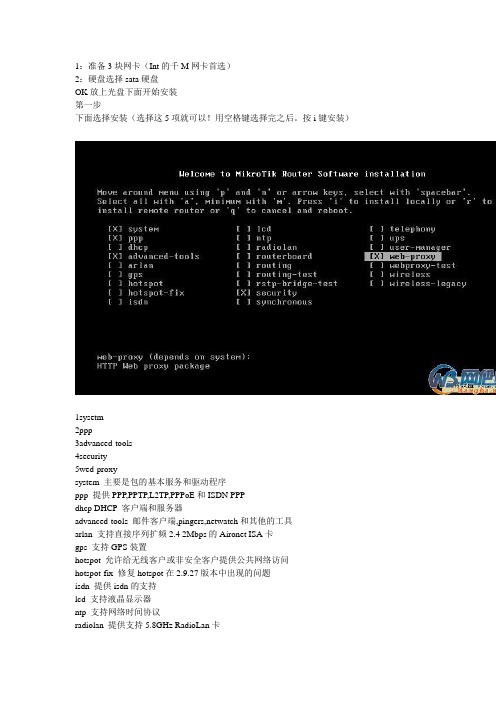
1:准备3块网卡(Int的千M网卡首选)2:硬盘选择sata硬盘OK放上光盘下面开始安装第一步下面选择安装(选择这5项就可以!用空格键选择完之后。
按i键安装)1sysetm2ppp3advanced-tools4security5wed-proxysystem 主要是包的基本服务和驱动程序ppp 提供PPP,PPTP,L2TP,PPPoE和ISDN PPPdhcp DHCP 客户端和服务器advanced-tools 邮件客户端,pingers,netwatch和其他的工具arlan 支持直接序列扩频2.4 2Mbps的Aironet ISA卡gps 支持GPS装置hotspot 允许给无线客户或非安全客户提供公共网络访问hotspot-fix 修复hotspot在2.9.27版本中出现的问题isdn 提供isdn的支持lcd 支持液晶显示器ntp 支持网络时间协议radiolan 提供支持5.8GHz RadioLan卡routerboard 支持路由主板的一些函数和工具routing 支持RIP,OSPF和BGP4协议routing-test 路由的测试包rstp-bridge-test 快速生成树协议桥的测试包security 支持IPSEC,SSH和安全的WinBox连接synchronous 支持Framerelay和Moxa C101,Moxa C502,Farsync,Cyclades PC300,LMC SBE和XPeed同步卡telephony IP电话的支持ups 智能模式下的APC UPS支持user-manager 用户管理服务web-proxy HTTP web代理支持webproxy-test HTTP web代理支持测试包wireless 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点(测试版) wireless-legacy 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点system:默认的system安装包含了01.IP地址管理,ARP协议,静态路由,策略路由,放火墙(包过滤,内容过滤,伪装,和静态的NAT),流量整形(队列方式),ip流量监控,Ros 的邻居发现,ip数据包的包装,DNS 客户端设置,IP服务(服务器)02.以太网接口的支持03.IP over IP隧道接口的支持04.以太网over IP隧道接口的支持05.管理以太网ISA卡06.串口的管理07.本地用户管理08.导入和导出路由器的配置脚本09.备份和恢复路由器的配置10.撤消和重置配置的改变11.网络诊断工具(比如ping,tracert,带宽测试,线路监控)12.桥接的支持13.系统资源包管理14.软件包管理15.telnet客户端和服务器的支持16.本地和远程的日志记录17.winbox服务器以及winbox可执行的一些插件第二步:提示是否保存旧的配置文件,因为我们是全新安装,所以不保存。
最强软路由ROS 2.9.27 安装 教程详解 全图解

ROS 2.9.27 安装教程详解全图解
做的教程的目的是为了让想学习的人降低门槛,
准备工作:P3整机一台(要求有一个以上的PCI 插口,硬盘最好用电子盘或者CF 卡256的够用,两个以上网卡插两张网卡加主板的集成网卡一共三个网卡,不要怕多,以后用的上的。
开始了
开机-BIOS-光驱启动-设置成通电后自动开机-保存-放入光盘-重启↓
重启后读到碟后会到这个界面,按一下A ,然后按I
这个界面后按
N
这个界面按Y之后进行安装了
这里按回车重启
如果装的能到这个界面,说明你的ROS已经装好了,输入账号admin回车,密码不填,再回车。
到这里后按N
我们来设置内网网关,这里输入SETUP。
这里按A
这里继续按A
这里按回车
这里输入你的想要的网关,也就是进入WINBOX的IP,我这里以10.66.0.1/24为例/24是255.255.255.0的意思,
连续按两下X 然后重启路由。
电脑上设置自己的IP 10.66.0.5 掩码255.255.255.0
拿条网线一头插电脑一头插路由的网卡,一般ether1是靠CPU最近的那块,打开IE,输入http://10.66.0.1,如进去后点击Download it下载WINBOX
双击WINBOX 输入10.66.0.1 密码不填点Connect 进入WINBOX
点击Interfaces 看到双击ether1 NAME改成lan ether2改成wan1 ether3改成wan2
好了ROS 2.9.27安装成功!
后续教程制作中!。
ROS软路由安装与设置步骤

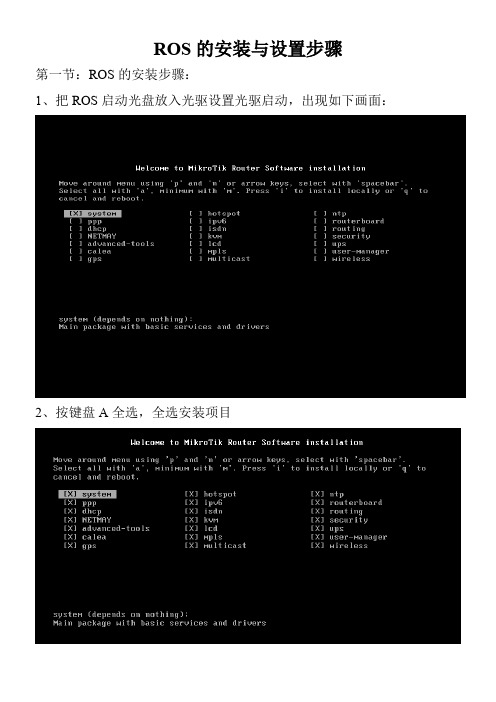
ROS的安装与设置步骤第一节:ROS的安装步骤:1、把ROS启动光盘放入光驱设置光驱启动,出现如下画面:2、按键盘A全选,全选安装项目3、按键盘i进行下一步,然后Y确定全新安装、N为不覆盖上次安装。
4、Y确定安装,N不安装。
我们选择Y5、系统在安装中,出现如下画面按回车重启,系统安装成功。
6、NETMAY 5.24 (版本意思)NETMAY Login: (用户名) 默认为:admin 输入完按回车7、Password(密码) 默认密码为空。
按回车8、按回车9、输入suetup 按回车安装配置10、输入a进行网关服务安装11、再输入a确定安装网关服务13、默认ether1网卡为内网网卡(即网关),根据个人用途可以手动修改ether2、ether3、ether4任何一个为内网网卡,(注:这个根据个人主机安装了几张网卡而定)14、输入你要作为网关的IP地址,如:192.168.1.1/24 回车15、输入x退出并保存回车16、到这步路由就已经安装成功了,在IE浏览其地址输入你刚才设置的路由器地址,就可以访问路由了。
第二节:登录器下载,网卡WAN、LAN识别、光纤网线的接入设置1、在IE浏览器输入网关地址出现如下画面选择点击第一图标登录器下载2、双击登陆器打开如下:Connect to: 填网关IP 也在右边按钮处选择MAC获取Logingl:用户名(默认为:admin)Password:(默认为空)填完以上回车即可登陆2、如何识别网卡WAN、LAN。
1、接口设置2、有数字流量的为LAN3、ether1到ether4到可以改名,可以改为相对应名字方便记忆。
如:ether2改为LAN 其他为WAN3、光纤网线的介入设置2、IP地址3、添加IP1、IP6、确定4、填写服务商提供上网IP地址。
如:192.168.1.6/245、选择wan1到wan3任何一个上网都可以。
ROS软路由安装与设置步骤
ROS的安装与设置步骤第一节:ROS的安装步骤:1、把ROS启动光盘放入光驱设置光驱启动,出现如下画面:2、按键盘A全选,全选安装项目3、按键盘i进行下一步,然后Y确定全新安装、N为不覆盖上次安装。
4、Y确定安装,N不安装。
我们选择Y5、系统在安装中,出现如下画面按回车重启,系统安装成功。
6、NETMAY 5.24 (版本意思)NETMAY Login: (用户名) 默认为:admin 输入完按回车7、Password(密码) 默认密码为空。
按回车8、按回车9、输入suetup 按回车安装配置10、输入a进行网关服务安装11、再输入a确定安装网关服务13、默认ether1网卡为内网网卡(即网关),根据个人用途可以手动修改ether2、ether3、ether4任何一个为内网网卡,(注:这个根据个人主机安装了几张网卡而定)14、输入你要作为网关的IP地址,如:192.168.1.1/24 回车15、输入x退出并保存回车16、到这步路由就已经安装成功了,在IE浏览其地址输入你刚才设置的路由器地址,就可以访问路由了。
第二节:登录器下载,网卡WAN、LAN识别、光纤网线的接入设置1、在IE浏览器输入网关地址出现如下画面选择点击第一图标登录器下载2、双击登陆器打开如下:Connect to: 填网关IP 也在右边按钮处选择MAC 获取 Logingl:用户名(默认为:admin ) Password:(默认为空)填完以上回车即可登陆2、如何识别网卡WAN 、LAN 。
3、光纤网线的介入设置1、接口设置2、有数字流量的为LAN 3、ether1到ether4到可以改名,可以改为相对应名字方便记忆。
如:ether2改为LAN 其他为WAN2、IP地址3、添加4、填写服务商提供上网IP地址。
如:192.168.1.6/246、确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ROS(RouterOS)2.9.7安装教程
准备工作(硬件):
1:低配置电脑(最低20GIDE硬盘,64MB内存,两张网卡)
2:用户电脑
准备工作(软件):
1:RouterOS 2.9.7 的Ghost安装版(主要是方便快捷)
2:Winbox
就这些。
当然我没有这些东西,所以我需要用VM虚拟机来搭建
搭建时一定要符合现场环境不要乱弄~~
采用DOS的配置方案,或者红旗linux,或者windows都行,但是不知道的不要瞎选,否则Linux会出现内核错误。
硬盘用40G的(20G的也买不到了哦~~)
设置好虚拟机后,将声卡,软驱删掉,设置内存为128MB(64M的也买不到了)如图:
注意:这张网卡与它内部机器相连,要设置为虚拟网络环境1的
不要与现实环境的网混淆。
还有一张网卡暂时不要设定进去,就是先用一块网卡。
OK,将光盘的镜像全盘恢复到硬盘上
(注意:第一块分区填入5000左右,否则会导致分区过大无法识别引导)。
不要问我如何将镜像恢复到整个硬盘。
这个是玩电脑的基本~~
好了,很快就会恢复完成重启~~~
输入账号:admin
密码为空,直接回车
ok,简单介绍使用方法:
这里都是类似DOS命令的东西。
命令:“\” 这个是结束当前命令操作(注意斜杠方向)命令:“..”两个点,用来返回上级命令状态
命令:“set” 配置ROS服务器。
命令:“int” 用来进入网卡设置界面,比如MAC,类型,名称。
“int”命令下:
命令:“pri”显示当前安装的网络设备信息
命令:“set”设置网卡参数
命令:“set 0 name=名字”设置0号网卡的名称
好了,这些了解到就行,一般我们都是用Winbox操作ROS的。
先进行简单配置,让winbox连上ROS:输入“set”进入设置:
然后输入a进入基本配置。
再输入a进入IP配置。
如图:
输入名称,默认ether1
一块网卡直接按回车即可。
输入这个ROS的“IP/子掩码”(自己决定,将来要做网关)
子掩码这里是简写,如24就是“255.255.255.0”
这里我输入“192.168.6.254/24”回车即可
知道为什么不输入“192.168.6.1/24”么?因为:如果是网吧还要把“192.168.6.1”分
给客户机,方便管理。
如图:
好了,输入x返回,再输入X退出(外网参数就不用在这设置了)
关机。
插上第二张网卡,这个是与外网连接的,所以直接桥接到我们真实网络上:
以上是ROS的基本配置
现在要做的是将ros的显示器、键盘、鼠标全部拔掉
但是BIOS的ERR提醒排除设置为“all error”否则开机需要键盘才行打开ROS,听到清脆的“滴滴”声,然后就不用再管它了~~
--------------------------------------华丽的分界线
--------------------------------------------
以下是虚拟机XP的操作,这个过程不涉及真实机的网络问题。
好了,打开“虚拟的XP”系统,将网卡设为“虚拟网络的”
就是说他和ROS在一个交换机上。
如图,这个是XP系统的虚拟机:
运行~~~~
进入系统将IP手工设置一下,否则连不上ROS:
DNS与当地运营商有关,不要照搬我的。
好了用winBOX连接ROS:
连接好了:
先设定一下网卡名称吧,在“Interfaces”里双击网卡就可改名:
我们把第一次设置的ether1改为“LAN”内网端
把新加的网卡改为“WAN”外网端
好了,接下来就应该设置链接到外网的IP了,打开“IP-Address”:会发现有个新加网卡,我们把它删掉右击“remove”,我们自己添加
点击“红+号”
这里填入外网的IP和子掩码(就是我现实环境给他的IP)
192.168.9.7/24
如图:
好了~~~重新打开会这样:不用管,它自己添加的~~
好了,现在开始设置。
什么呢???
当然是外网的网关啦~~
在“IP-Routes”里:
输入网关ok就行,然后会出现“AS”标志,网关就设置并验证成功了:
好了~~现在仿佛感觉上是ROS已经可以上网了(当然它不能上网玩)
现在要设置共享上网,让下面的机器跟着它上网,现在这个XP还是上不去网就是因为192.168.6.254没有共享网络。
打开“IP-firewall”:
先设置网段:
这个设置方法是范围法:
如:192.168.6.0-192.168.6.254就是整个192.168.6.X网段包含的IP,可以不包含路由,但是客户机的IP必须有否则会连不上去。
如果是192.168.6.x全网段可以简写为:192.168.6.0/24 我设的是全网段
接下来是伪装IP:
Action的masquerade是IP伪装的意思,换句话说让用户使用的ROS的伪装IP上网,
达到共享网路目的.
好了,这次真的好了~~
上个网试试吧~~~
你也可以看一看“interface”卡,会有流量提示:。