教你如何安装ROS
用虚拟机vmware安装网吧路由ROS详尽教程(完美)

本文只献给初学Router OS又想测试自已的ROS是否可以正常使用的朋友,由于教程是在网吧做的,一些前提条件一定要注意,否则失败很高的~~工具准备:虚拟机:深度VMwar e6.0完美精简汉化版ROS:ROS2.9.27无功能限制破解版iso前提条件:1:知道本网吧的网关,和一个没人用的内网IP地址。
2:有两台客服机:一台装虚拟机做ROS路由器,另一台测试RO S的正确性。
3:网吧里的机子一定不能ARP绑定!发现很多测试不成功的就是因为这个了。
一,ROS2.9.27安装首先你要在机器上装好虚拟机并添加一块网卡,安装的是双网卡的ROS 嘛,没有双网卡还怎么测试呀!虚拟机添加网卡的设置如下:在安装好的虚拟机下新建立一个操作系统---->编辑虚拟机设置---->硬件---->选取以太网---->添加---->以太网适配器---->下一步---->完成---->确定。
好了,这样虚拟机就有两个网卡了!下面设置虚拟机光驱启动RO S2.9.27.ISO光盘镜像文件:虚拟机中双击C D-ROM---->使用ISO镜像---->找到ROS的安装镜像---->点确定。
好了,现在点击虚拟机中的启动该虚拟机,开始安装ROS2.9.27了。
我们可以看到这个画图1这里是问你选择要安装的组件 , 我们按 A 全选 ( 也可以通过方向键和空格键选择要安装的组件 ) 这里先不作组件的介绍 , 我就全选A图2按I 键开始安装会有一个提示Do you want to keep old configu ration? [y/n]:意思问你是否保持磁盘原有的格式 , 这里我们选 N, 不保留图3接下来还有个提示 ,Continu e? 意思是是否格式化硬盘 , 我们选 Y图4正在格式化硬盘, 正在复制文件图5正在安装。
教你如何安装ROS

备注:ROS 2.9.27 系列硬盘只支持IDE硬盘STAT SAS SICSI 等硬盘都不支持3X系列已上支持STAT硬盘1.第一放入光碟。
从光驱启动。
2.选择2安装ROS2.9.27。
等待30秒左右显现如下画面3.然后键盘按A 图如下4.在按键盘“I”图如下提示按Y确信,再按n不保留旧配置。
5.继续按Y不保留旧的配置6.提示是不是安装并自动格式化硬盘继续按键盘“Y”就开始安装系统了7.安装完成后提示按ENTER 回车从头启动系统从头启动系统上来输入默许账号admin密码为空会显现如以下图提示按Y观看ROS相关信息。
按N取消。
按N继续8.然后输入Internet pri 查看网卡。
看2快网卡识别到了没有。
9.上图可见。
已经成功识别到2快网卡了。
下面输入setup 进行安装。
10.然后继续按A 设置新的IP地址和网关。
11.继续按A 设定新的IP地址12.提示设置ether1网卡IP 假假想设置另外快网卡。
直接把ether1 改ether2 然后敲回车即可。
我进行第一块网卡配置。
图片如下13.提示输入新的IP地址和子网掩码。
输入内网IP地址和子网掩码。
例子内网网关伟子网掩码为那么输入14.会提示你设置网关地址。
由于内网ROS的IP确实是客户机的网管。
因此一样内网网管能够无需设置、按X 退出15.继续按X退出16. 然后继续用WINBOX治理器连接。
接下来的配置全在WINBOX里操作完成。
在IE阅读器上输入17.点击Download 下载WINBOX下载到本地并运行输入效劳器IP地址和默许账号admin 密码为空18.敲回车进行连接19.然后点击IP-address list20.点击+号进行IP配置输入电信或网通提供给你的IP地址和子网掩码电信提供的IP地址和子网掩码。
Interface 那里选ether2 是设置第二块网卡IP。
设置完成后点OK就行。
21. 接下来继续设置外网网关。
鼠标点击IP-ROUTES 点加号22.输入外网网关后点回车。
ROS安装教程(ROSMelodic+Ubuntu18.04)

ROS安装教程(ROSMelodic+Ubuntu18.04)本教程主要是演⽰如何安装ROS,所使⽤的系统是Ubuntu 18.04。
以下分为三部分:1. 更改apt源2. 按照ROS官⽹给出的安装教程进⾏安装3. 测试是否安装成功1. 更改apt源百度搜索清华源,然后单击页⾯右下⾓的使⽤帮助,然后划到最下⾯找到ubuntu,此时页⾯如图:然后我们将编辑框中的⽂字复制,按下Ctrl+Alt+T打开终端,在终端下输⼊sudo gedit /etc/apt/sources.list打开sources.list⽂件,删除⽂件内容,并将刚才复制的内容粘贴进去,然后在终端下输⼊sudo apt-get update。
2. 按照ROS官⽹给出的安装教程进⾏安装然后我们打开,选择Ubuntu,等待页⾯加载完成后就可以按照步骤来完成安装。
步骤1.1我没有进⾏1.1步骤,但最后也是安装成功了。
步骤1.2在这⼀步要点击Mirror链接,进⼊后选择⼀个国内的源,防⽌更新速度太慢。
我选择了USTC这个源。
步骤1.3~1.7在完成步骤1.2之后,步骤1.3~1.7只需要按照页⾯指导进⾏完成即可,不过要注意的是有可能因为⽹络原因更新速度较慢,可以尝试使⽤⼿机热点来改善。
3. 测试是否安装成功在完成步骤1.1~1.7之后,如果没有出现其它问题,那么正常来说,你已经成功安装了ROS,下⾯我们运⾏⼀个简单的程序来测试ROS是否安装成功。
打开⼀个终端在终端下输⼊roscore,这句命令主要是启动ros的核⼼程序。
然后再新建⼀个终端,输⼊rosrun turtle_sim turtlesim_node。
如果成功弹出了以上的窗⼝。
祝贺你!证明你已经成功安装了ROS。
视频以上的安装过程我录制了⼀个视频,如果只看⽂字还不明⽩的话,可以对照着视频进⾏安装。
ROS安装教程范文

ROS安装教程范文一、ROS的安装环境1. Ubuntu系统:可以使用Ubuntu 14.04/16.04/18.04/20.04 版本;2. ROS版本:Melodic/Kinetic/Noetic;3. ROS软件仓库:支持ROS软件仓库的操作系统(如:debian/Ubuntu);4. ROS软件包:ROS提供的软件包,如rospy、roscpp、vision_opencv等。
二、ROS安装步骤1.添加ROS软件仓库:在安装ROS前,需要向Ubuntu添加ROS的软件仓库,命令如下:2. 添加ROS的安全key:添加完ROS的软件仓库之后,需要添加ROS的安全key,命令如下:3. 更新Ubuntu的软件包:为了确保安装ROS过程中不会出现错误,建议更新Ubuntu的软件包,命令如下:sudo apt-get update4.安装ROS环境:要安装ROS,需要首先安装ROS环境,命令如下:sudo apt-get install ros-version-desktop-full其中,version表示使用的ROS版本,例如要安装melodic版本,则version=melodic;desktop-full表示安装完整的ROS环境,包括ROS系统基础软件、开发工具以及ROS官方提供的标准软件包。
5.初始化ROS相关环境变量:在使用ROS之前,需要初始化ROS相关环境变量,命令如下:source /opt/ros/version/setup.bash其中,version表示使用的ROS版本(例如melodic),setup.bash 为ROS的设置文件。
6.安装ROS支持的软件包:安装完ROS环境后。
ROS安装教程

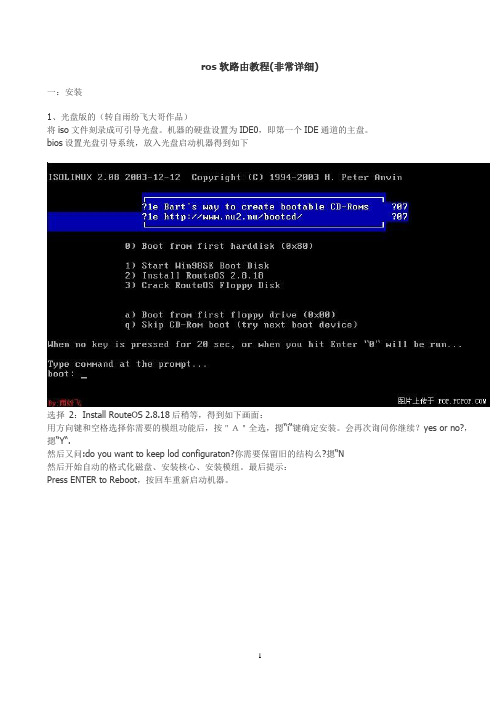
ROS安装教程一:安装1、光盘版的(转自雨纷飞大哥作品)将iso文件刻录成可引导光盘。
机器的硬盘设置为IDE0,即第一个IDE通道的主盘。
bios设置光盘引导系统,放入光盘启动机器得到如下选择2:Install RouteOS 2.8.18后稍等,得到如下画面:用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。
会再次询问你继续?yes or no?,摁“Y“.然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N然后开始自动的格式化磁盘、安装核心、安装模组。
最后提示:Press ENTER to Reboot,按回车重新启动机器。
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了):选择3: Crack RouteOS Floppy Disk,开始破解。
破解过程都是中文的。
如果你的硬盘在IDE0:0的话破解是不会有问题的。
否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。
问你是否重启呢。
把光盘拿出来后按下Y确定重启动重新启动后开始登陆。
初始用户名admin,初始密码为空。
咦?怎么还有提示注册的信息和Soft ID?原来是还需要一个命令激活注册补丁才可以哦:输入命令:/system license import file-name=key或者缩写为/sy lic i f key然后提示你是否重新启动。
按Y重新启动重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了现在服务器启动起来了,但是还没有任何配置,若想用winbox对其进行控制,则必须激活和配置网卡的ip 掩码等。
这里我装了三块网卡,一块接电信,一块接网通,一块路由后接内网交换机。
首先看看三块网卡是否都被识别出来了,命令是:/interfaceprint可以缩写为/intpri以后用缩写不再另外注名。
机器人操作系统的使用中常见问题解答

机器人操作系统的使用中常见问题解答机器人操作系统(ROS)是一款广泛应用于机器人开发的开源操作系统。
它提供了一系列工具、库和函数,用于构建机器人软件以及控制硬件。
ROS的使用非常普及,但在使用过程中,用户常常会遇到一些问题。
本文将针对机器人操作系统的使用中的常见问题进行解答,帮助用户更好地理解和应用ROS。
1. Q: 如何安装ROS?A: ROS有多个版本,最新版本为ROS 2。
安装ROS的最简单方式是通过官方提供的安装脚本进行安装。
首先,需要选择安装的ROS版本,然后按照官方文档的指引进行安装。
一般而言,安装ROS的过程涉及添加软件源、安装ROS基本系统以及一些必要的依赖。
安装完成后,使用以下命令来验证ROS是否安装成功:$ rosversion -d。
2. Q: 如何创建ROS工作空间?A: 工作空间是ROS用来保存工程和代码的目录。
要创建一个ROS工作空间,首先需要创建一个目录,然后使用以下命令将该目录初始化为ROS 工作空间:$ mkdir -p ~/catkin_ws/src。
然后切换到src目录下,执行catkin_init_workspace命令:$ cd ~/catkin_ws/src,$ catkin_init_workspace。
最后编译工作空间并设置环境变量:$ cd ~/catkin_ws,$ catkin_make,$ source devel/setup.bash。
3. Q: 如何创建ROS软件包?A: ROS软件包用于组织、构建和管理ROS代码。
要创建一个ROS软件包,首先需要在工作空间的src目录下执行以下命令:$ cd ~/catkin_ws/src,$ catkin_create_pkg <package_name> std_msgs roscpp rospy。
其中,<package_name>是软件包的名称,std_msgs、roscpp和rospy是软件包所依赖的库。
ros安装及设置完整版
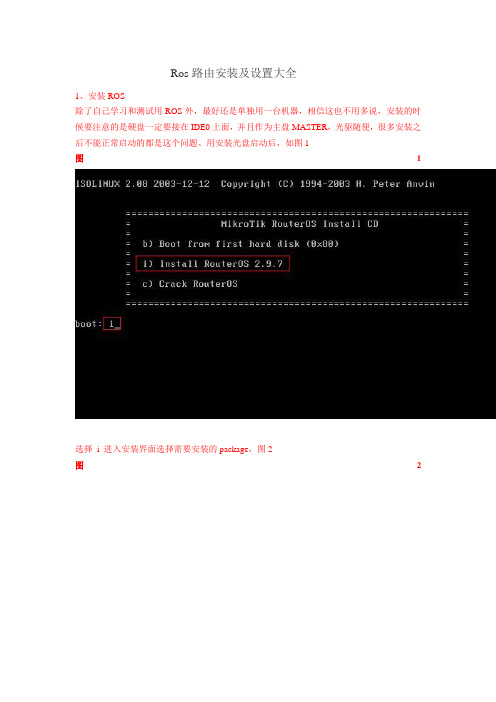
Ros路由安装及设置大全1、安装ROS除了自己学习和测试用ROS外,最好还是单独用一台机器,相信这也不用多说,安装的时候要注意的是硬盘一定要接在IDE0上面,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、用安装光盘启动后,如图1图1选择i 进入安装界面选择需要安装的package,图2图2选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进入ROS 是未注册的版本,如图4图4用光驱启动,在启动菜单按c破解,图5图5破解之后进入已经没有了未注册提示。
见图6图32、服务端配置/interface pri 能显示出你现在可用的网卡。
如图6图6/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置成功没有提示,可以用pri查看见图7图73、winbox配置(所有配置都在这里进行)在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输入IP和用户名连接(图8)图8进入配置界面(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9 图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红*部分是自动添加的.图10图10(3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信.如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel图11(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12图12(5) 上传路由表文件cnc.rsc,如图13图13在WINBOX中,NEW TERMINAL,输入import cnc完成.如图14图14现在已经可以电信网通自动切换了.(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC文件到192.168.1.1,在NEW TERMINAL里执行import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16至此,基本OK了.第一次写教程用了2个多小时呵呵..有什么不完整的地方欢迎大家补充,大家可以从本站下载R OS 2.9.6破解版。
U盘安装ROS或海蜘蛛路由教程

先到东莞网盟主页下载,海蜘蛛路由ISO文件。
搜索:海蜘蛛或是ROS. 将下载回来的ISO文件复制到U盘的根目录,再在U盘根目录新建一文件夹命名为“hsrouter”,用WinRAR打开下载回来的ISO文件,将里面的boot文件夹解压到U盘中刚才新建的hsrouter目录中。
解压出来的内容中包括一个“grub”的文件夹,可以删除,只留下initrd.gz和vmlinuz文件即可,节省宝贵的U盘空间。
修改U盘根目录的menu.lst文件,看清楚里面的格式,对照格式加入以下内容:
title 启动海蜘蛛路由系统USB 安装程序(简体中文)
root (hd0,0)
kernel /hsrouter/boot/vmlinuz root=/dev/ram0
initrd /hsrouter/boot/initrd.gz
好了,海蜘蛛的功能就添加完毕了,已经测试绝对可用。
本人测试成功的ROS安装的引导代码
title 启动ROS2.9.27 安装
kernel /els/isolinux/linux
initrd /els/isolinux/initrd.rgz load_ramdisk=1 prompt_ramdisk=0 ramdisk_size=6464 rw root=/dev/ram SETUP=usb。
ros软路由教程(非常详细)
ros软路由教程(非常详细)一:安装1、光盘版的(转自雨纷飞大哥作品)将iso文件刻录成可引导光盘。
机器的硬盘设置为IDE0,即第一个IDE通道的主盘。
bios设置光盘引导系统,放入光盘启动机器得到如下选择2:Install RouteOS 2.8.18后稍等,得到如下画面:用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。
会再次询问你继续?yes or no?,摁“Y“.然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N然后开始自动的格式化磁盘、安装核心、安装模组。
最后提示:Press ENTER to Reboot,按回车重新启动机器。
重新启动后出现图1的那个引导画面(如果没有出现而直接进了登陆界面说明用硬盘引导了):选择3: Crack RouteOS Floppy Disk,开始破解。
破解过程都是中文的。
如果你的硬盘在IDE0:0的话破解是不会有问题的。
否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。
问你是否重启呢。
把光盘拿出来后按下Y确定重启动重新启动后开始登陆。
初始用户名admin,初始密码为空。
咦?怎么还有提示注册的信息和Soft ID?原来是还需要一个命令激活注册补丁才可以哦:输入命令:/system license import file-name=key或者缩写为/sy lic i f key然后提示你是否重新启动。
按Y重新启动重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了现在服务器启动起来了,但是还没有任何配置,若想用winbox对其进行控制,则必须激活和配置网卡的ip 掩码等。
这里我装了三块网卡,一块接电信,一块接网通,一块路由后接内网交换机。
首先看看三块网卡是否都被识别出来了,命令是:/interfaceprint可以缩写为/intpri以后用缩写不再另外注名。
ROS5.25安装及设置简易教程(by锅片儿)

ROS5.25网关服务器安装及设置简易教程A准备部分:文件下载地址:链接: /s/1jGtDIvW 密码: t8rdB安装部分:1.用U盘引导进入PE系统(基础操作,不再啰嗦)2.打开“1.安装用ros5.25_225M”文件夹3.在运行里输入“cmd”进入命令行4.在命令行里输入p.exe -u r.img(注意中间空格,也可在安装说明文件里复制命令粘贴)5.选择需要安装到的磁盘。
其中0..1表示硬盘.(如果只有1个盘显示0..0.)这时要看清楚那块是要安装到的硬盘。
输入对应的序号后回车(我这里要输入0)。
6.接着会问你是否确定.输入y。
然后会把镜像写入硬盘,写入完了手动重启即可。
C配置部分:1.让服务器的一个网卡插到交换机,这个网卡当做服务器的内网;找局域网中的另一台与这台服务器在同一网络的任意电脑,运行文件中的winbox程序。
2.开始链接服务器,点击…按钮3.之后选择MAC地址4.默认没有密码,直接点击链接5.点击Interfaces修改网络名称,可以把内网改为lan,外网改为wan以便区分,操作如图。
通常后边网络数据比较大的是内网。
6.准备设置ip地址。
依次点击IP---Addresses7.设置外网IP。
以四中为例,“沁阳教育系统最新IP规划(参考)”表中显示为10.0.20.9/30,设置时要在把IP最后一位+1,点击红色加号填入10.0.20.10/30,然后下边选择wan网卡,点击OK。
8.设置内网IP。
表中显示172.27.24.1,设置的时候直接使用该地址,/后的数字根据不同学校来确定,1个C的填入24,2个C的填入23,4个C的填入22。
再次点击红色加号,比如四中就要填入172.27.24.1/23,然后下边选择lan网卡,点击OK。
9.设置外网网关。
依次点击IP---Routers,点击红色加号,在Gateway(网关)处填入表中的wan地址10.0.20.9,点OK。
ROS安装指南

ROS安装指南ROS 安装OS: Ubuntu 20.04ROS: Noetic官⽅指南ROS官⽅提供了个⼈经验以下内容基本上是对官⽅指南的翻译1. 设置Ubuntu仓库打开Ubuntu的“软件与更新”,勾选restricted universe和multiverse三项。
默认是勾选的,建议打开来检查⼀下。
2. 设置Sources.listsudo sh -c 'echo "deb /ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'3. 设置keyssudo apt install curl # if you haven't already installed curlcurl -s https:///ros/rosdistro/master/ros.asc | sudo apt-key add -这⾥执⾏第⼆条命令时遇到了报错gpg: 找不到有效的 OpenPGP 数据解决⽅式:wget /ros.keysudo apt-key add ros.key4. 安装sudo apt updatesudo apt install ros-noetic-desktop-full如果在第3步遇到了报错,并采⽤了上⽂中的解决⽅式,则使⽤以下命令sudo apt-get update --fix-missingsudo apt install ros-noetic-desktop-full5. 建⽴环境对每⼀个需要使⽤ROS的bash窗⼝,⾸先使⽤以下命令source /opt/ros/noetic/setup.bash可以使⽤以下命令使bash启动后⾃动执⾏上⾯的命令echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcsource ~/.bashrc6. 开发环境如果想要创建⾃⼰开发ROS功能包,还需要安装⼀些依赖项sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential7. 初始化rosdeprosdep可以帮助你轻松地安装编译代码时所需的系统依赖,并且也是ROS运⾏核⼼组件时需要的⼀项。
ROS安装及配置教程11
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
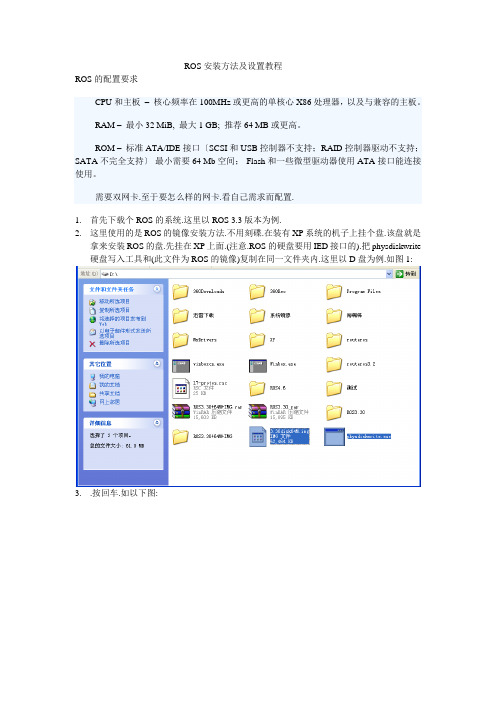
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
MikroTik ROS软路由器
MikroTik ROS软路由器2.9.6安装过程简介安装前请看看“第三部分”中的“安装要求”第一:硬盘在使用时必须设置为主盘,连接在IDE第一个通道,如果为从盘,则启动时可能会反复出现01或07这样的数字,而无法使用。
第二:ROS软路由器配置要求非常低!甚至可以使用赛场386CPU的电脑来配置一台软路由,它可以使用一台废弃的电脑变成一台电信级的专业路由器。
功能几乎可以和市场上价值1万元的硬件路由器匹敌。
一、安装ROS一.准备一张ROS2。
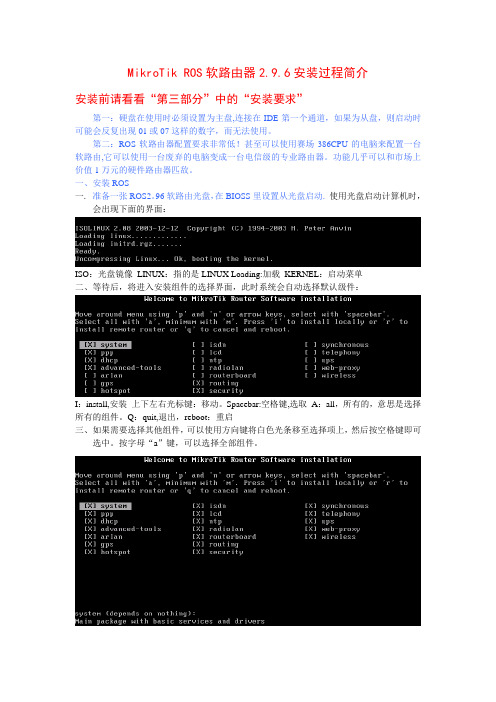
96软路由光盘,在BIOSS里设置从光盘启动.使用光盘启动计算机时,会出现下面的界面:ISO:光盘镜像LINUX:指的是LINUX Loading:加载KERNEL:启动菜单二、等待后,将进入安装组件的选择界面,此时系统会自动选择默认级件:I:install,安装上下左右光标键:移动。
Spacebar:空格键,选取A:all,所有的,意思是选择所有的组件。
Q:quit,退出,reboot:重启三、如果需要选择其他组件,可以使用方向键将白色光条移至选择项上,然后按空格键即可选中。
按字母“a”键,可以选择全部组件。
四、选择好所需组件后,按字母“i”键,即可开始安装程序,此时系统会提示“硬盘上的所有数据都会被删除,是否继续”,此时选择“y”:五、选择“y”后,系统再次提示“是否保留原来的配置信息”,此时选择“n”。
六、安装过程开始,系统会自动创建及格式化分区,并显示各组件安装进度条。
警告:磁盘中的所有数据会被删除!继续?(y/n)你要保留旧的配置吗?(y/n)创建分区。
格式化磁盘。
组件安装进度七、待各组件安装结束后,系统会提示“软件安装完成,按‘回车’键重启计算机”,此时按回车键重启计算机即可按“回车”键重启计算机八、启动计算机后,在BIOSS里设置从硬盘启动,屏幕出现第一次的启动画面:检测硬盘是否有错误询问是否要继续检测(y/n)SSH:是一种登陆接口,和我们常用的WINBOX,TELNET,WEB,作用是一样。
手把手教你安装Ros破解版2.9.27(图解).doc
由于网吧或则小型企业选择Ros做软路由的比较多!今天我就先发一帖讲述关于安装Ros的。
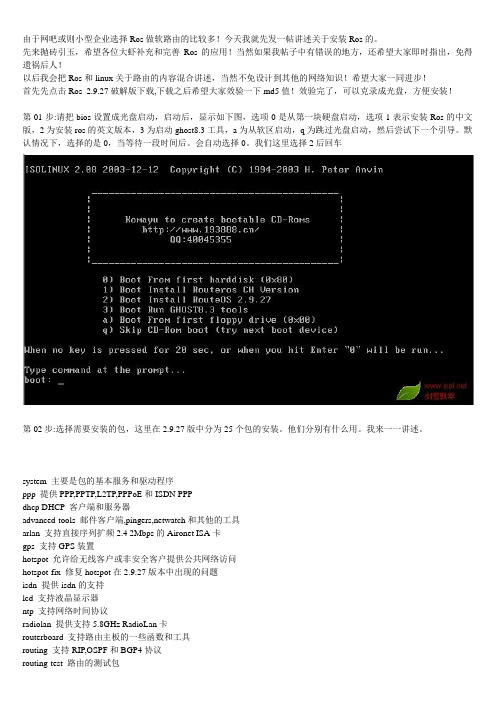
先来抛砖引玉,希望各位大虾补充和完善Ros的应用!当然如果我帖子中有错误的地方,还希望大家即时指出,免得遗祸后人!以后我会把Ros和linux关于路由的内容混合讲述,当然不免设计到其他的网络知识!希望大家一同进步!首先先点击Ros_2.9.27破解版下载,下载之后希望大家效验一下md5值!效验完了,可以克录成光盘,方便安装!第01步:请把bios设置成光盘启动,启动后,显示如下图,选项0是从第一块硬盘启动,选项1表示安装Ros的中文版,2为安装ros的英文版本,3为启动ghost8.3工具,a为从软区启动,q为跳过光盘启动,然后尝试下一个引导。
默认情况下,选择的是0,当等待一段时间后。
会自动选择0。
我们这里选择2后回车第02步:选择需要安装的包,这里在2.9.27版中分为25个包的安装。
他们分别有什么用。
我来一一讲述。
system 主要是包的基本服务和驱动程序ppp 提供PPP,PPTP,L2TP,PPPoE和ISDN PPPdhcp DHCP 客户端和服务器advanced-tools 邮件客户端,pingers,netwatch和其他的工具arlan 支持直接序列扩频2.4 2Mbps的Aironet ISA卡gps 支持GPS装置hotspot 允许给无线客户或非安全客户提供公共网络访问hotspot-fix 修复hotspot在2.9.27版本中出现的问题isdn 提供isdn的支持lcd 支持液晶显示器ntp 支持网络时间协议radiolan 提供支持5.8GHz RadioLan卡routerboard 支持路由主板的一些函数和工具routing 支持RIP,OSPF和BGP4协议routing-test 路由的测试包rstp-bridge-test 快速生成树协议桥的测试包security 支持IPSEC,SSH和安全的WinBox连接synchronous 支持Framerelay和Moxa C101,Moxa C502,Farsync,Cyclades PC300,LMC SBE和XPeed同步卡telephony IP电话的支持ups 智能模式下的APC UPS支持user-manager 用户管理服务web-proxy HTTP web代理支持webproxy-test HTTP web代理支持测试包wireless 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点(测试版)wireless-legacy 提供支持Cisco的Aironet卡,prismii和Atheros的无线站和接入点system:默认的system安装包含了01.IP地址管理,ARP协议,静态路由,策略路由,放火墙(包过滤,内容过滤,伪装,和静态的NAT),流量整形(队列方式),ip流量监控,Ros的邻居发现,ip数据包的包装,DNS客户端设置,IP服务(服务器)02.以太网接口的支持03.IP over IP隧道接口的支持04.以太网over IP隧道接口的支持05.管理以太网ISA卡06.串口的管理07.本地用户管理08.导入和导出路由器的配置脚本09.备份和恢复路由器的配置10.撤消和重置配置的改变11.网络诊断工具(比如ping,tracert,带宽测试,线路监控)12.桥接的支持13.系统资源包管理14.软件包管理15.telnet客户端和服务器的支持16.本地和远程的日志记录17.winbox服务器以及winbox可执行的一些插件其他的包详细说明因为包含的范围和领域太广,如果想详细了解,请浏览[url]http://wirelessconnect.eu/index.php?option=com_content&task=blogsection&id=0&Itemid=627&limit=22&limitstart=0[/u rl]和[url]/testdocs/ros/2.9/guide/packages.php[/url]由于很多地方网吧或企业的是使用的PPPoe方式的,所以我这里安装system和ppp还有advanced-tools.其他的安装包会在以后详细介绍功能时,提醒大家安装。
ROS安装及配置(图解)步骤

ROS2.9.7安装配置上网步骤制作人:郭成玉1、准备工作:主板:845以上、硬盘:1G—80G并口、CPU:2.0G、内存:256M、网卡:(Inter82559、8139.INTEL82540)、显卡:主板自带、光盘一张、光驱!2、光驱启动到如图:一般选择者几项(按a全选、按空格选中一项)按i开始安装。
3、安装提示:是否保留以前的设置(按N不保留,按Y保留)一般不保留按N4、安装提示:是否格式化硬盘选Y是。
5、出现格式化过程,格式化完后按Enter从起电脑6、启动电脑到后如果你下载的ROS不是破解版的还需按C破解,如果已经破解的直接用硬盘启动到ros的登录界面7、用户名:admin(回车),密码:空(直接回车)是否查看ros相关信息,全洋文看不懂按N回车8、进入ros的最初配置这里输入/int pri查看已经安装的网卡信息9、出现网卡信息,这儿只有一张网卡,R表示网卡已经激活了,如果是X那还需激活网卡:命令Int回车输入enable 0 表示第一张网卡10、我们看到ether1如果是两张或者是三张等等,那么ether2、ether3。
我们把网卡的名字改一下便于后好操作。
改名网卡:int set 0(表示第一张网卡) name=dianxin(也可以WAN表示外网)、如果还有网通的就命名为:int set 1 name=wangtong、第三张就命名为内网:set 2 name=LAN网卡命名完成!!11、接下来配内网和外网的IP命令:ip address add address 192.168.XXX.XXX/24 interface=lan回车ip address add address 58.42.XXX.XXX(通行部门给你的IP)/子网掩码interface=dianxin(WAN)12、查看配置信息命令:ip add pri查看IP地址配置信息!13、找局域网内的某一天电脑浏览器上输入http://192.168.XXX.XXX后下载一个Winb ox登陆器14、登陆路由WebConnet Tok:输入192.168.XXX.XXX, Login:输入原始账号:admin、Password密码为:空点击Connect登陆路由器15、进入路由Web的第一个界面。
ROS安装及配置教程
ROS安装及配置教程ROS(Robot Operating System)是一个开源机器人操作系统,它提供了一系列的工具和库以帮助开发者构建机器人应用程序。
本文将介绍ROS的安装和配置过程。
ROS支持多个操作系统,包括Ubuntu、Debian、Fedora等。
在本教程中,我们将使用最常用的Ubuntu系统进行演示。
第一步:安装Ubuntu首先,在您的计算机上安装Ubuntu操作系统。
ROS支持多个Ubuntu 版本,但在本教程中,我们将使用最新版本的Ubuntu 20.04 LTS作为示例。
第二步:添加ROS软件包仓库在安装ROS之前,我们需要将ROS软件包仓库添加到Ubuntu的软件源中。
打开终端并执行以下命令:``````第三步:添加ROS密钥运行以下命令以添加ROS密钥:```sudo apt install curl```第四步:安装ROS运行以下命令以安装ROS桌面完整版:```sudo apt updatesudo apt install ros-noetic-desktop-full```在这个例子中,我们使用的是ROS Noetic版本。
根据您的需求,您可以安装不同的ROS版本。
第五步:初始化ROS在安装完成后,我们需要初始化ROS环境。
打开终端并运行以下命令:```source /opt/ros/noetic/setup.bash```要使ROS环境变量在每次打开新终端时都自动加载,可以将上述命令添加到您的`.bashrc`文件中。
第六步:创建ROS工作空间在使用ROS之前,我们需要创建一个ROS工作空间。
ROS工作空间是您存放ROS代码和构建项目的地方。
首先,创建一个名为`catkin_ws`的目录,并进入该目录:```mkdir -p ~/catkin_ws/srccd ~/catkin_ws/```然后,初始化工作空间:```catkin_make```完成初始化后```source devel/setup.bash```第七步:安装ROS工具运行以下命令以安装常用的ROS工具:```sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential ```第八步:配置ROS最后,运行以下命令以更新ROS依赖项:```sudo rosdep initrosdep update```至此,ROS的安装和配置已经完成。
机器人操作系统ROS的安装与配置教程

机器人操作系统ROS的安装与配置教程机器人操作系统(Robot Operating System,ROS)是一个通用的机器人软件开发平台,提供了一系列的库和工具,方便开发者创建和运行机器人应用程序。
ROS的安装与配置是使用该平台的第一步,下面将详细介绍ROS的安装和配置教程。
1. 确认操作系统和硬件要求在开始安装ROS之前,需要确保你的操作系统符合要求。
ROS支持多种操作系统,包括Ubuntu、Fedora等。
此外,还需要确认你的硬件配置满足ROS的最低要求,如处理器、内存等。
2. 选择ROS版本并下载安装包ROS有多个版本可供选择,其中ROS Kinetic是目前最新的稳定版本。
访问ROS官方网站,选择与你的操作系统匹配的ROS版本,并按照指引下载对应的安装包。
3. 安装ROS下载安装包后,执行以下命令进行安装:```$ sudo apt-get update$ sudo apt-get install ros-<version>-desktop-full```请将上述命令中的`<version>`替换为你下载的ROS版本号,例如`kinetic`。
安装过程可能需要较长时间,请耐心等待。
4. 初始化ROS工作空间安装完成后,需要初始化ROS工作空间以便于开发和构建ROS的应用程序。
执行以下命令创建一个工作空间:```$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make```上述命令创建了一个名为`catkin_ws`的工作空间,并执行了编译操作。
在工作空间中,包含了`src`目录用于存放ROS的软件包。
5. 配置ROS环境为了能够正确地使用ROS,需要将ROS的环境变量配置到系统中。
执行以下命令将ROS的环境变量添加到`.bashrc`文件中:```$ echo "source /opt/ros/<version>/setup.bash" >> ~/.bashrc $ source ~/.bashrc```请将命令中的`<version>`替换为你安装的ROS版本号。
ros3.22安装教程

ROS3.20安装+破解+升级3.22教程首先,我们要准备3个文件Ros_key.rar(用于破解ROS3.20)all_packages-x86-3.22.zip(ROS3.22的升级包)mikrotik-3.20.iso(ROS3.20的ISO文件)开始安装ROS3.20安装时选择的模块,注意ROS3.20有个BUG 如果全选的话只会安装几个模块,后面带(-test)的最后不要选!!按“I”安装ROS问你是否保持旧的配置,我这里选择“N”(否)这里问你是否安装ROS,将会格式化整个硬盘选“Y”安装完毕!!按回车重启ROS3.2 启动成功!下面开始破解!这里提示注册,不用理它先给网卡设置一个IP按“A”配置Ip和网关再按“A”添加IP下面蓝色部分ether1 是IP的网卡,我这里默认按回车我设置的IP是192.168.1.55 后面的/24 是子网掩码再回车设置完毕,然后按“X”返回WINBOX里面连接ROS这里提示注册(不用理它)按“OK”点击WINBOX菜单里面的“Files”选项弹出文件列表。
将ros_key.rar 解压,得出以下文件。
将“keygen.npk”这个文件拖动到文件列表重启路由,keygen.npk 会被安装等ROS重启完毕之后。
在ROSkey文件夹里面的run.bat右击,“编辑”将IP改为ROS的IP 即刚刚设置的IP 192.168.1.55关闭并保存然后运行run,bat弹出以下界面,如果没反应就是IP错误在“\w>”后面输入“roskey /dev/had NNFT-86N”一定要分大小写然后按回车正在算号~好运的话我是个10分钟,最长3小时请耐心等待。
算号结束….算号结束。
ID变成NNFT86N了点击License…\ros_key\key文件\L6将NNFT-86N.key 文件拖到License窗口下~点击YES重启重启之后ROS 已经被注册,破解成功接下来就是升级成ROS3.22打开文件列表将all_packages-x86-3.22.zip解压缩里面有很多文件把这些文件都拖到WINBOX的文件列表下面稍等。
ros最新安装教程(图文教程)

ros最新安装教程(图⽂教程)ros安装教程(图⽂教程)1、安装ROS除了⾃⼰学习和测试⽤ROS外,最好还是单独⽤⼀台机器,相信这也不⽤多说,安装的时候要注意的是硬盘⼀定要接在IDE0上⾯,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、⽤安装光盘启动后,如图1:/doc/e72a9f6148d7c1c708a14550.html图1选择i 进⼊安装界⾯选择需要安装的package,图2图 2 /doc/e72a9f6148d7c1c708a14550.html选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进⼊ROS是未注册的版本,如图4 图⽤光驱启动,在启动菜单按c破解,图5图5破解之后进⼊已经没有了未注册提⽰。
见图6图32、服务端配置/interface pri 能显⽰出你现在可⽤的⽹卡。
如图6 图/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内⽹IP,其中192.168.1.1/24添⾃⼰的内⽹IP ,设置成功没有提⽰,可以⽤pri查看见图7图73、winbox配置(所有配置都在这⾥进⾏)在局域⽹其他机器IE浏览器192.168.1.1 进⼊WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输⼊IP和⽤户名连接(图8)图8进⼊配置界⾯(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添⽹通和电信给的IP/⼦⽹掩码(不要和我的⼀样...),红*部分是⾃动添加的.图10图10(3)IP->ROUTE,+号添加默认的⽹关,默认⽹通就添⽹通⽹关,默认电信就添电信的⽹关,这⾥默认电信. 如图11,正常下⿊圈处11(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡⾥为masquerade.OK,现在可以通过电信上⽹了.图12图12在WINBOX中,NEW TERMINAL,输⼊import cnc完成.如图14 图14现在已经可以电信⽹通⾃动切换了.(6)只是切换也不太安全,⼀定要配制⼀下防⽕墙么,同5⼀样,上传防⽕墙的RSC⽂件到192.168.1.1,在NEW TERMINAL ⾥执⾏import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16⾄此,基本OK了.第⼀次写教程⽤了2个多⼩时呵呵..有什么不完整的地⽅欢迎⼤家补充,⼤家可以从本站下载ROS 2.9.6破解版。
ROS软路由安装及设置步骤
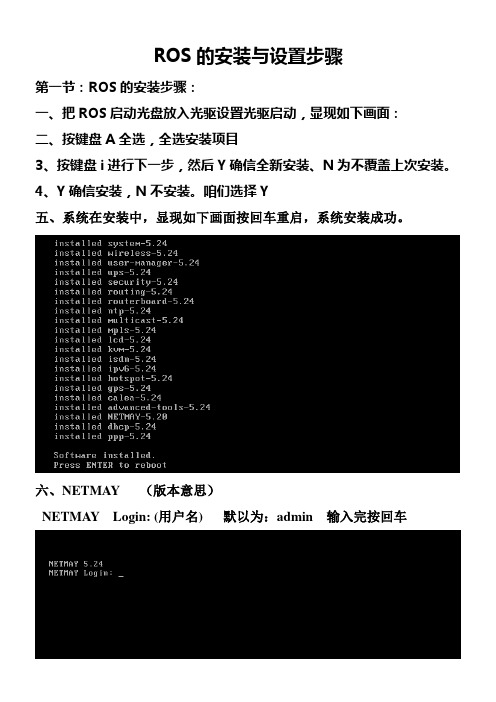
ROS的安装与设置步骤第一节:ROS的安装步骤:一、把ROS启动光盘放入光驱设置光驱启动,显现如下画面:二、按键盘A全选,全选安装项目3、按键盘i进行下一步,然后Y确信全新安装、N为不覆盖上次安装。
4、Y确信安装,N不安装。
咱们选择Y五、系统在安装中,显现如下画面按回车重启,系统安装成功。
六、NETMAY (版本意思)NETMAY Login: (用户名) 默以为:admin 输入完按回车7、Password(密码) 默许密码为空。
按回车八、按回车九、输入suetup 按回车安装配置10、输入a进行网关效劳安装1一、再输入a确信安装网关效劳13、默许ether1网卡为内网网卡(即网关),依照个人用途能够手动修改ether二、ether3、ether4任何一个为内网网卡,(注:那个依照个人主机安装了几张网卡而定)14、输入你要作为网关的IP地址,如:回车1五、输入x退出并保留回车1六、到这步路由就已经安装成功了,在IE阅读其地址输入你适才设置的路由器地址,就能够够够访问路由了。
第二节:登录器下载,网卡WAN、LAN识别、光纤网线的接入设置1、在IE阅读器输入网关地址显现如下画面选择点击第一图标登录器下载二、双击登岸器打开如下:Connect to: 填网关IP 也在右边按钮处选择MAC获取Logingl:用户名(默以为:admin)Password:(默认为空)填完以上回车即可登陆2、如何识别网卡WAN、LAN。
1、接口设置2、有数字流量的为LAN3、ether1到ether4到可以改名,可以改为相对应名字方便记忆。
如:ether2改为LAN 其他为WAN3、光纤网线的介入设置2、IP地址3、添加IP1、IP6、确定4、填写服务商提供上网IP地址。
如:5、选择wan1到wan3任何一个上网都可以。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
备注:ROS 2.9.27 系列硬盘只支持IDE硬盘STAT SAS SICSI 等硬盘都不支持3X系列已上支持STAT硬盘1.首先放入光碟。
从光驱启动。
2.选择2安装ROS2.9.27。
等待30秒左右出现如下画面3.然后键盘按A 图如下4.在按键盘“I”图如下提示按Y确定,再按n不保存旧配置。
5.继续按Y不保存旧的配置6.提示是否安装并自动格式化硬盘继续按键盘“Y”就开始安装系统了7.安装完成后提示按ENTER 回车从新启动系统从新启动系统上来输入默认账号admin密码为空会出现如下图提示按Y观看ROS相关信息。
按N取消。
按N继续8.然后输入Internet pri 查看网卡。
看2快网卡识别到了没有。
9.上图可见。
已经成功识别到2快网卡了。
下面输入setup 进行安装。
10.然后继续按A 设置新的IP地址和网关。
11.继续按A 设定新的IP地址12.提示设置ether1网卡IP 若想设置另外快网卡。
直接把ether1 改ether2 然后敲回车即可。
我进行第一块网卡配置。
图片如下13.提示输入新的IP地址和子网掩码。
输入内网IP地址和子网掩码。
例子内网网关伟192.168.30.220 子网掩码为255.255.255.0 则输入192.168.30.220/255.255.255.014.会提示你设置网关地址。
由于内网ROS的IP就是客户机的网管。
所以一般内网网管可以无需设置、按X 退出15.继续按X退出16. 然后继续用WINBOX管理器连接。
接下来的配置全在WINBOX里操作完成。
在IE浏览器上输入http://192.168.30.220/17.点击Download 下载WINBOX下载到本地并运行输入服务器IP地址和默认账号admin 密码为空18.敲回车进行连接19.然后点击IP-address list输入电信或者网通提供给你的IP地址和子网掩码Interface 那里选ether2 是设置第二块网卡IP。
设置完成后点OK就行。
21. 接下来继续设置外网网关。
鼠标点击IP-ROUTES 点加号22.输入外网网关后点回车。
23. 这样基本ROS配置完成了。
只需要最后一步就可以上网了、鼠标点击IP-Firewall-nat 点击加号24. 选ACTION 然后选择masquerade 确定。
就搞定。
客户机就可以上网了25.点击intelface 查看网卡流量。
看到ether1 和ether2都有流量则可以正常上网了================================================================================== ================================================================================== 26.客户机限速限速就利用到脚本限制了、脚本如下:for yxcs from 1 to 253 do={ /queue simple add name=("A" . $yxcs) dst-address=("192.168.0." .$yxcs . "/32") max-limit=400000/500000 }"A" 是名字开头1 to 253 是1-253 192.168.0. 这里是设置IP段。
我刚才上面是设置内网段为30段。
那么改成192.168.30.max-limit=400000/500000 } 这段是限制上传为48kb/s 下载为61KB/S 计算机方式400000*1024*8=48.8KB/S比如我想限制192.168.1.1-192.168.1.120 上传为500KB/S 下载为MMB/S 那么脚本如下:for yxcs from 1 to 120 do={ /queue simple add name=("A" . $yxcs) dst-address=("192.168.0." . $yxcs . "/32") max-limit=500000/1000000 }把脚本复制到system-scripts-点加号。
把脚本复制进去然后选中脚本点run script 运行脚本运行1次成功可以到限速列队里查看Queuts以上就是客户机限速。
27.端口映射IP-Firewall-nat 点击加号设置如下说明:219.137.174.219 是设置外网IP 6(TCP)是协议。
DST PORT 是映射的端口。
(这个端口可以自定义的。
随便你设置什么都可以)这里是设置内网需要映射的IP 内网端口必须设置。
不能够像外网端口那样自定义。
28. ARP绑定ROS ARP绑定可以手动一台台客户机的绑定MAC地址什么是MAC地址?MAC地址就是客户机物理网卡的MAC地址。
如何查看我的电脑MAC地址多少?在CMD下输入ipconfig/all 就可以得到自己机器的MAC网卡地址如下图00-E0-A0-15-98-F7 就是我本机的MAC地址。
为什么要绑定MAC地址呢?第一方便管理,第二:MAC是网卡唯一编号,和IP绑定之后,别人无法通过该IP地址来非法上网第三:防ARP病毒。
具体自己BAIDU一下(ROS双向绑定)首先介绍手动ROS绑定客户机的MAC地址在IP-ARP-ARP LIST里。
前面带D的就是未绑定MAC地址。
怎么绑MAC呢。
如下图(把鼠标点击到你要绑定MAC的IP上。
在点COPY )点了COPY之后会弹出这个对话框点OK 你就会发现192.168.30.39 前面的D就没有了。
这样你就绑定成功了这样并非就完全调试好了。
还要更改一个地方既是正确设置。
点击INTERFACE 双击ether2网卡。
选中reply-only 后点击确定即设置成功。
这样设置后。
下面客户机MAC地址和IP不就无法上网。
有效防止ARP 也方便网管管理。
继续介绍通过脚本自动绑定ARP。
(必须在客户机和服务器全部开机的情况下执行脚本。
免得少数机器没有绑定。
没绑定的机器是无法上网的。
)自动绑定ARP脚本如下:foreach szwm in=[/ip arp find dynamic=yes ] do={/ip arp add copy-from=$szwm}把脚本复制到system-scripts-点加号。
把脚本复制进去然后选中脚本点run script 运行脚本如图脚本已经执行成功然后在IP-ARP里看是否绑定成功上图已证明已经绑定成功。
Interface ether2网卡还需要设置下上面说过这样设置后就可以了。
29. 删除ARP绑定。
(为什么要删除ARP绑定呢?因为有些时候客户机主板坏了。
换了新主板而无法上网。
那么就得删除了从新绑定)设置如下选中要取消绑定的机器。
点-号及删除绑定。
然后新的客户机MAC地址会出现。
在如上面方法绑定一下即可。
在ROS防火墙里设置鼠标点击IP-Firewall-Filter reles 点击加号114.80.100.230 是你要限制的Ip 6 (TCP)是协议80是你要限制的端口。
然后选Action 设置AROP 点回车就屏蔽掉114.80.100.230 就不能够访问这个IP的网页了在ROS防火墙里设置鼠标点击IP-Firewall-Filter reles 点击加号然后选Advanced 然后在content 里输入你想限制的网站。
然后在点Action 选DROP 在点OK就设置好了。
32.ROS 导入防火墙在互联网上又很多ROS防火墙。
哪个好哪个不好。
这个要自己测试过才知道。
下面就介绍下如何导入ROS防火墙。
从互联网是下载了ROS防火墙后通过ROS FTP 吧文件传输到ROS FTP里这个就是我从互联网上下载的ROS防火墙 unity3d/forum.php unity3d论坛/forum76.html unity3d游戏/forum36.html unity3d教程/topic/index.html unity3d专题/forum-news-1.html unity3d资讯/forum-job-1.html unity3d招聘/forum-openclass-1.html unity3d培训课/sitemap.xml继续连ROS FTP。
输入默认账号admin密码为空,回车。
然后在吧文件从本地拖拽到FTP里。
然后在WINBOX里执行命令导入防火墙名字是2.rsc 导入命令可以简写im 2.rsc 就行了。
提示导入成功查看导入的一些设置。
导入已经成功。
下面是一些防火墙的设置。
33. 修改ROS 默认账号和密码在WINBOX UEERS里修改鼠标点击默认账号admin 会弹出个对话框然后在点最下面PASSWORD 又会弹出个对话框。
提示输入新密码。
直接在NEW PASSWOR 和CONFIRM PASSWORD 里输入新的密码就成功的修改了账号。
另外修改默认账号ADMIN 直接在NAME那里把admin改成你直接想修改的任意名都可以34.ROS 添加新用户。
在WINBOX UEERS里修改点+号。
弹出对话框。
直接在NAME里写你要创建的账号。
GRUP是权FULL 最大管理权限WRITE 可写可读、READ只读账号。
不能对ROS做任何修改通过上面的图文介绍。
是一些基本的配置。
和详细的设置方法。
ROS一些高级应用大家可以对逛逛论坛学习学习。
晚上从安装ROS系统到设置完成历时4小够累的!。