caba步a进电机原理及ff使用说明
a步a进电机原理及使用说明

步进电机原理及使用说明一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。
产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有0.1N·M~40N·M。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
f2a交流电机控制器说明书
f2a交流电机控制器说明书
f2a交流电机控制器是一种用于控制交流电动机的设备,它通常用于工业生产中的机械设备、风力发电机组、电梯等领域。
以下是关于f2a交流电机控制器的详细说明:
1. 功能介绍,f2a交流电机控制器主要功能是控制交流电动机的启动、停止、速度调节和方向控制。
它可以实现电机的平稳启动和停止,并且可以根据需要调节电机的转速和方向。
2. 技术参数,f2a交流电机控制器的技术参数包括额定电压、额定电流、控制方式、保护功能等。
用户在使用时需要根据实际情况选择合适的型号,以确保设备的正常运行。
3. 接线说明,f2a交流电机控制器的接线说明包括电源接线、电机接线、控制信号接线等内容。
用户在安装和使用时需要严格按照接线说明进行操作,以确保安全可靠。
4. 使用注意事项,f2a交流电机控制器在使用过程中需要注意防水防潮、避免过载、定期检查设备运行状态等。
此外,还需要注意设备的维护保养,定期清洁和润滑以延长设备的使用寿命。
5. 故障排除,f2a交流电机控制器可能会出现各种故障,如启动失败、速度不稳定等。
在出现故障时,用户需要根据说明书中的故障排除方法进行检查和处理,或者及时联系售后服务人员进行维修。
总的来说,f2a交流电机控制器是一种功能强大、使用方便的设备,能够有效控制交流电动机的运行,提高设备的稳定性和可靠性。
用户在使用前应详细阅读说明书,按照要求正确安装和操作,以确保设备的正常运行和安全使用。
a步a进电机原理及ff使用说明
步进电机原理及使用说明一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。
产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有0.1N·M~40N·M。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
AB软启动操作使用说明
A-B软启动器操作使用说明电化厂机动科二00一年十月一.软启动器的起动方式选择┅┅┅┅┅ 2 二.软启动器的参数查看方法┅┅┅┅┅ 3 三.参数修改┅┅┅┅┅ 5 四.常见故障信息及消除方法┅┅┅┅┅ 5 五.常见故障说明┅┅┅┅┅7 六.常用参数及说明┅┅┅┅┅8 七.软启动器的初次调试┅┅┅┅┅11软启动器使用操作说明一.软启动器的起动方式选择:软启动器的起动方式常用的有以下几种:1.软起动:该方式是最常用的起动方式,电动机可根据参数设定的初始转矩进行起动。
起动加速时间在0—30S之间,由用户自行调节。
起动斜坡加速期间,输出至电机的电压不断上升,当软启动器的控制器检测到电动机已达到额定转速状态,则输出电压将自动切换到全电压。
(若设定的起动时间为30S,在20S的时候如果电动机已达到额定转速,电机端电压已达到全电压,则不必等到30S)2.限流起动:限流起动顾名思义,限制电机的起动电流,该方式为电动机提供一固定电压的降压起动。
限流水平可由用户在电机满载电流的500-600%间调节,限流起动时间0—20S由用户设定。
在起动过程中,当软起动器的控制器检测到电机的额定转速时,输出电压将自动切换成全压输出,这点与软起动方式有些区别:软起动过程电压是无级不断增加的;而限流起动是始终以一固定电压起动的。
3.全压起动:该方式同一般设备的启动相同,一般来说,既然选用了软启动器就不太会选用该方式进行起动。
4.可选择的突跳起动:该起动功能一般是附加于软起动方式或限流起动方式之中,为电动机起动提供一个大提升转矩以克服负载惯性,突跳时间可由用户在0.0—2.0S之间设定。
我厂采用的软起动方式主要有以下两种:1.限流加突跳起动方式:该方式主要用于PVC的水环压缩机、抽风机、鼓风机和排渣泵等设备,因为这些设备的电机容量较大,起动电流较大,其供电线路也较长,采用限流起动,可减少对配电室母线电压的影响,以免造成当大设备启动时,母线压降大,使照明及其他设备失电跳闸的情况发生。
执行机构工作原理及使用方法
特点:电路结构简单,但串联R2消耗能量降低放大功率;电感较大使电路对脉冲反应较慢,输出波形差。主要用于转速要求不高的小型步进电机控制。
3.电流检测型驱动
图2-28 电流检测驱动电路原理
恒流斩波驱动
(a)恒流斩波驱动电路 (b)电路波形图2-29恒流斩波驱动电路
4.细分驱动
设备难于小型化;液压源和液压油要求严格;易产生泄露而污染环境。
机电一体化系统对执行元件的基本要求
(1)惯量小,动力大。 (2)体积小,重量轻。 (3)安装方便、便于维修维护。 (4)易于实现自动化控制。 2.3 电动执行机构 常用电动执行机构 : DC/AC电动机、力矩电动机、步进(脉冲)电动机、变频调速电动机、开关电磁电动机以及其他电动机(直流或交流脉宽调速电动机、电磁伸缩元件)等。
1—换向极铁心;2—换向极绕组
图2-6 直流电机电刷装置
1—电刷;2—刷握;3—弹簧压板; 4—座圈;5—刷杆
电刷与换向器配合可以把转动的电枢绕组电路和外电路连接并把电枢绕组中的交流量转变成电刷端的直流量。电刷装置由电刷、刷握、刷杆、刷杆架、弹簧、铜辫构成,如图所示。电刷组的个数,一般等于主磁极的个数。
气压式
气体压力源压力5~7×Mpa;要求操作人员技术熟练。
气源方便、成本低;无泄露而污染环境;速度快、操作简便。
功率小、体积大、难于小型化;动作不平稳、远距离传输困难;噪音大;难于伺服。
液压式
液体压力源压力20~80×Mpa;要求操作人员技术熟练。
输出功率大,速度快、动作平稳,可实现定位伺服控制;易与计算机(CPU)连接。
2.2 执行元件的种类及性能
种类
特点
优点
缺点
电气式
eha工作原理

eha工作原理嗨,宝子们!今天咱们来唠唠EHA这个超有趣的东西的工作原理。
EHA呀,全名是电动静液作动器(Electro - Hydrostatic Actuator)。
你可以把它想象成一个超级智能的小助手,在好多复杂又厉害的系统里发挥着关键作用呢。
咱先从它的基本构成说起哈。
EHA里面有电机,这电机就像是它的小心脏,源源不断地提供动力。
这个电机可不像咱们家里普通小电器里的电机那么简单哦。
它得特别精准,动力输出得恰到好处。
然后呢,还有液压泵,这就像是一个魔法转换站。
电机一转起来,就带动液压泵开始工作啦。
液压泵就把电能转化成液压能,就像把一种魔法能量转化成另一种魔法能量似的。
再说说它的液压部分。
这里面有液压油在跑来跑去。
液压油在整个系统里可重要啦,就像血液在咱们身体里一样。
当液压泵把液压油加压后,这些高压的液压油就会冲向作动筒。
作动筒就像一个大力士的肌肉,液压油进去后,作动筒就开始伸缩啦。
这一伸一缩的动作,就能推动各种需要被推动的东西,比如说飞机的襟翼啦,或者是一些大型机械的关键部件。
你想啊,在飞机上,EHA的作用可大了去了。
飞机在飞行的时候,要根据不同的情况调整襟翼的角度。
这时候EHA就开始工作啦。
电机欢快地转起来,液压泵把液压油弄得活力满满,然后作动筒就稳稳地推动襟翼到合适的角度。
就像一个超级精确的小工匠,一点点地雕琢着飞机的飞行姿态。
而且哦,EHA还有个很厉害的地方就是它的控制部分。
这就像是它的小脑袋。
这个控制部分可以接收各种信号,然后根据这些信号来指挥电机和液压系统的工作。
比如说,如果飞机上的传感器发现现在的飞行速度需要襟翼调整到一个特定的角度,这个信号就会传到EHA的控制部分。
控制部分就会说:“电机老弟,你得转快点啦,液压泵兄,你也加把劲哦。
”然后整个系统就协调一致地工作起来啦。
在一些工业设备里,EHA也是个不可或缺的角色。
比如说那些大型的起重机,要把很重很重的东西吊起来,还得准确地放到指定的位置。
EFAFLEX快速卷帘门MCP2说明书
艾富来带有自动化驱动的卷帘式和折叠式门系统,是用于工业或私家的。 它们为建筑物的门增添各式各样的品种。
它们,举例,不是为游泳池而设计的。 应用在别处场合,需要艾富来的书面认可。
下列各种德国标准已被采用: — DIN EN 292/1 和 EN 292/2 系统、设备和机械的安全 — DIN EN 294,达到危险点的安全间隙距离 — DIN EN 60 204-1,机械用的电气设备 — DIN EN 50 081-1,干扰的发射 — DIN EN 50 082-1,干扰的灵敏度 下面的德国绘图标准已部分考虑到:
在打开控制器的箱子前,在任何情况下必须做到: ″ 控制箱的箱子必须没有电源 ″ 主开关,必须锁住以防再起作用(上锁) ″ 电源的绝缘必须检查 控制单元内装有一组电容器,在某时间周期内用以储存电能。当此单元已除去能源以后,至少要 等待 5 分钟后再使电气系统开始工作。
在维护的期间内,警告标志要放置在门和控制器的上面,防止外人来 操作或者让门运动起来。
″ 控制器是设计为 203 伏 50/60 赫的,容许的供电范围应该处在 84 到 264 伏交流之间。当在 270 伏交流及以上电压时,将损坏控制器。
″ 电源需采用下列具有 K 性能的熔断器保护。(空气断路器)
驱动功率
电压
保护
导线截面
高于 0.55 千瓦
1×230 伏交流+N+PE
16 安慢熔断
3×1.5 平方毫米
பைடு நூலகம்″ 在综合电路元件存在故障时,电路中间电容上电压低于 60 伏直流的放电时间会变长,在这种情
″
况下,放电时间将大于十分钟(例如,熔断器 F3 熔断)。
″ 24 伏控制电压在短路或严重过载时,尽管电路中间电容有电压,综合电路元件也不能起动。
faac720开门机中文说明书

faac720开门机中文说明书◊传动臂角度:180度◊开门方向:单向◊工作电压:AC220 ±10% V/50 ±10% HZ◊驱动电机:24V直流有刷电机◊输入接口:干接点信号O开、关门时间:仁9秒(可调)◊上电后进入通行状态所需时间:3秒◊工作环境:室内、室外(阴棚)◊温度:-1CTC一一50°C相对湿度:<90%,不凝露—、安装说明1、设备的安装:开门机中预埋铺设RVV4X0.75mm2信号线及2X1.5mm2控制线。
并将控制线接至控制室。
用四个膨胀螺丝按下图底座安装尺寸将开门机固定。
2、设备接线安装1)输入接口:OPEN 、GND 为干接点短路信号;2)接线排的连接:按接线排的标识接好电源和开闸信号; 与门禁控制板、出门按钮、电锁电路连接图出门按钮锁负锁正口吁以口n E J fe GND OPEN 用户门禁控制板端子m GND +12V 丄X 磁力锁电轍(<2A) l=fl~ 采删加>训玮殲―祠ORW2X0.5mm^t ^B二、设备参数设置操作说明一、通用描述1.显示屏是指主控板上的从左到右显示的2位LED:2.三个按键从左到右依次为INC键,DEC键,SET键,SET键用于进入和退出功能设定;INC键用于对需要设定的参数进行加1;DEC键用于对需要设定的参数进行减1,或退出菜单(显示01时按DEC键退出菜单);当要进入某项功能号时按SET键,此时显示屏显示2位当前功能号参数并闪烁,表示可以用INC键(+ ), DSC键(一)对此功能号参数进行修改, 修改完成后按SET键退出此项参数设置。
按DEC键退出菜单并保存修改的数据。
二、进入和退出菜单的设定1.进入菜单:按下SET键2秒,松开SET键,这时显示屏示“01”字样, 表示己经进入菜单设置状态,这时可用INC键来选择设定功能的功能号; 按INC键,功能号加1;共有6种功能设定,分别是:01:开门时间保持(行人需要通行时间)单位秒,如:此时间设为9 即为9秒,行人刷卡后在设定时间内不通行则取消刷卡,开始关门。
双通道步进电机工作原理
双通道步进电机工作原理
双通道步进电机是一种常用的电机类型,其工作原理基于电磁感应和电流控制。
首先,双通道步进电机由两组电磁线圈构成(通常为A相和
B相),每组线圈有两个端子(通常为A+和A-、B+和B-),并且线圈之间90度相位差。
当电流通过A相线圈时,会在该线圈产生一个磁场,根据洛
伦兹力的原理,该磁场会与电流方向垂直的磁场相互作用,从而产生一个力矩。
根据右手定则,当电流通过A相线圈时,该力矩会使电机转
动到与A相线圈磁场方向对齐的位置。
同样的原理适用于B相线圈。
通过控制A相和B相线圈的电流,可以使电机在不同的位置停下或旋转。
这种控制方式通常由驱动器或控制器实现。
双通道步进电机的转动步数取决于电流的控制方式和频率。
通过改变电流的大小和方向,可以实现电机以一个固定步距旋转、连续旋转或反向旋转。
总结而言,双通道步进电机通过控制不同组线圈的电流来产生旋转力矩,从而实现精确控制和定位。
布鲁斯缝纫机庒脚马达说明书
布鲁斯缝纫机庒脚马达说明书
感谢您选择布鲁斯缝纫机底脚马达。
本说明书将为您提供底脚马达的使用和维护的相关信息。
1. 安全事项:
- 在使用底脚马达之前,请确保将缝纫机断电并拔掉电源插头,以免发生电击危险。
- 使用底脚马达时,请确保周围环境通风良好,避免机器过热。
- 在安装或更换底脚马达时,请务必关掉机器电源。
2. 安装说明:
- 将底脚马达插头与缝纫机插座对应插入。
- 注意插头的方向和插入深度,确保插头稳固连接。
- 检查底脚马达的安装是否牢固,避免在使用过程中脱落或摇晃。
3. 使用说明:
- 在打开缝纫机电源之前,确保底脚马达已正确安装。
- 使用底脚马达时,请注意是否有异常噪音或震动,如有请立即停止使用并排除故障。
- 在使用过程中,避免重物碰撞底脚马达,以免损坏零件。
4. 维护:
- 定期清理底脚马达周围的灰尘和杂物,保持通风良好。
- 如发现底脚马达产生过热或其他异常情况,请立即断电,并及时联系售后服务中心。
- 不要自行拆卸或修理底脚马达,以免影响保修。
请遵守以上使用和维护说明,以确保底脚马达的正常运行和安全使用。
如有其他问题或需要更详细的信息,请参考附带的厂家说明书或联系售后服务中心。
各种电机原理动图,根本停不下来!
各种电机原理动图,根本停不下来!百度百科中国汽车⼯程师之家 加微信群--⾸页中间菜单--微信群--选择群汽车企业内部培训服务(见菜单栏)汽车⼈才--找⼯作,发布招聘信息(见微信菜单、⽹站⾸页)汽车零部件通信录--(公共账号菜单--⾏业资讯--通信录)五⼤⼯具(APQP/FMEA/PPAP/SPC/MSA) (6,7,8每⽉开课)车⾝尺⼨优化与尺⼨⼯程(企业定制)----------------------------------------------------------------------电机(俗称“马达”)是指依据电磁感应定律实现电能转换或传递的⼀种电磁装置。
在电路中⽤字母M表⽰。
它的主要作⽤是产⽣驱动转矩,作为⽤电器或各种机械的动⼒源。
发电机在电路中⽤字母G表⽰。
它的主要作⽤是利⽤电能转化为机械能。
电动机主要包括⼀个⽤以产⽣磁场的电磁铁绕组或分布的定⼦绕组和⼀个旋转电枢或转⼦和其它附件组成。
在定⼦绕组旋转磁场的作⽤下,其在电枢⿏笼式铝框中有电流通过并受磁场的作⽤⽽使其转动。
定⼦(静⽌部分)定⼦铁⼼:电机磁路的⼀部分,并在其上放置定⼦绕组;定⼦绕组:是电动机的电路部分,通⼊三相交流电,产⽣旋转磁场;机座:固定定⼦铁⼼与前后端盖以⽀撑转⼦,并起防护、散热等作⽤;转⼦(旋转部分)转⼦铁⼼:作为电机磁路的⼀部分以及在铁⼼槽内放置转⼦绕组;转⼦绕组:切割定⼦旋转磁场产⽣感应电动势及电流,并形成电磁转矩⽽使电动机旋转;1、直流电动机直流电机是将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
当它作电动机运⾏时是直流电动机,将电能转换为机械能;作发电机运⾏时是直流发电机,将机械能转换为电能。
▲直流电机的物理模型图上图的直流电机的物理模型图,固定部分有磁铁,这⾥称作主磁极;固定部分还有电刷。
转动部分有环形铁⼼和绕在环形铁⼼上的绕组。
海霸泵工作原理

海霸泵工作原理Sea lion pump is a type of submersible pump widely used in marine applications. 海狮泵是一种广泛应用于海洋领域的潜水泵。
It works on the principle of converting mechanical energy into hydraulic energy to pump water or other fluids from one location to another. 其工作原理是将机械能转化为液压能,将水或其他流体从一个地点抽到另一个地点。
The basic components of a sea lion pump include a motor, impeller, casing, and shaft. 海狮泵的基本组成部分包括电机、叶轮、壳体和轴。
The motor is responsible for providing the necessary power to drive the impeller and pump water. 电机负责提供所需的动力来驱动叶轮并抽水。
The impeller, typically made of stainless steel, is responsible for creating the necessary centrifugal force to push the water through the pump. 叶轮通常由不锈钢制成,负责产生必要的离心力将水推出泵。
As the motor spins the impeller, water is drawn into the pump through an inlet and is forced out through a discharge outlet. 当电机旋转叶轮时,水通过进水口被吸入泵中,并通过排水口排出。
[工程科技]liba经编机说明书
![[工程科技]liba经编机说明书](https://img.taocdn.com/s3/m/d3a55a6e3968011ca30091f5.png)
[工程科技]liba经编机说明书目录1.概述关于操作说明的重要说明。
安全注意订购配件停机及配件保存LIBA符号说明2.简介3.机器的固定、安装3.1 运输3.2.1 安装3.2.2 清洁3.2.3 上油3.3 机器高度的调整3.4 机器底部压力弹簧的安排 3.5 配电3.6 电路图和特别的操作说明 3.7 导线的保护4 调节4.1 梳栉横移4.2 横移时间的调整4.4 链节的标记4.6 主传动的调节(频率转换) 4.6a 主传动的伞形夹持套筒 4.7 编织机件的调节4.8 编织机件的重新调节 4.9 传动杆的重新调整 4.10 针床的轴向及横向的重新调整4.12a 电磁感应式的邻位开关4.13 织物的牵拉4.14 织物的卷取机构 4.16 加热系统4.17 自动控制流程控制器 4.18衬纬4.18.1 传动链传动4.18.2 纬纱夹持系统 4.18.3 纬纱针钩和夹纬器的安排4.18.4 纬纱高度4.18.5 衬纬装置4.18.6 衬纬行程的改变 4.18.7 剪切装置4.18 电力纬纱热熔剪切机 4.19 调整工作宽度4.22 安装花型循环的传输链 4.23 复式纱架4.23.1 粘滑杆纱线张力器 4.23.2 纬纱张力器4.23.3 纱线喂给轮装置(贮纱装置)4.24 喂给辊5开机的检查就绪工作 5.1 控制部件5.2 停机5.3 开关程序5.4 排针5.7 编织运动5.9 加热/冷却系统5.10 自动流程控制5.11.5 纬纱精梳装置5.11.7 加固装置5.13 抗静电杆单元6.原始操作6.1 分段经轴和经轴导向轴 6.2 单经轴纱线送纱EBA 6.3 导纱梳栉穿纱6.3.1 衬入编链线6.4 移开导纱梳栉6.5 穿纱6.6 纱线方向和张力装置 6.7 织物上的设置6.7.1 纬纱线的编织 6.7.2 编链线的编织 6.8 织疵,它们的原因和消除 6.9 编织例子6.10 把线头穿入导纱针 6.11 提花链节和链条扩展 6.13 衬纬装置的工作原理 7 可消费部分的保养,维护和替换7.1 润滑7.1.1 主轴7.1.2 梳栉横移机构 7.1.3 针行7.1.4 轴7.1.5 提花轮/链节润滑 7.1.6 梳栉导纱针梢 7.1.7 梳栉张力装置7.1.8 引纬器7.1.9 传动链、齿形带、链7.1.9a 主轴传动、带7.1.9b 皮带的预拉伸7.1.10单经轴送经齿轮R5的维护 7.2 润滑计划7.3 滤油器7.4 替换编织机件7.5 密封风箱和传动组的替换 7.6 替换球状承窝7.9 从经轴传动组上分离蜗轮边盘 7.11 传动棒7.12 有故障的抗静电杆的定位 7.13 抗静电杆的清洁7.14粘棒纱线张力器7.14a 喂给轮单元的故障的消除 7.15 卷曲辊7.16 单经轴送纱传动R5的维修 7.17 液压系统(ELS)*7.18 胸梁上的减振器润滑油表8.附加的,第三组设备电机标有*的设备是一种特别的型号。
A2系列伺服使用说明-慧控机电

为了方便作日常的检查、维护及了解异常发生之原因及处理对策,请妥善保管本说明书在 安全的地点,以便随时参阅。 注:请将此说明书交给最终之用户,以使伺服驱动器发挥最大效用。
ii
目
第一章 产品检查及安装
录
1-1 产品检查 ............................................................................................................................ 1-1 1-1-1 伺服驱动器机种确认................................................................................................. 1-1 1-1-2 伺服马达机种确认..................................................................................................... 1-2 1-1-3 伺服驱动器与伺服马达搭配对照表......................................................................... 1-2 1-2 伺服驱动器外观及面板说明 ............................................................................................1-8 1-3 伺服驱动器操作模式简介 .............................................................................................. 1-10 1-4 伺服驱动器安装环境条件与方法 .................................................................................. 1-11 1-4-1 安装环境条件 ........................................................................................................... 1-11 1-4-2 安装方向及间隔 ....................................................................................................... 1-12 1-5 伺服马达安装环境条件与方法 ......................................................................................1-13 1-5-1 安装环境条件 ........................................................................................................... 1-13 1-5-2 安装方式 ................................................................................................................... 1-13 1-5-3 其他注意事项 ........................................................................................................... 1-14
FFBUS说明
FFBUS操作说明2.6、现场仪表的正常状态2.6.1、科隆电磁流量计Resource Block(FETxxxx_RB):RS_STATE = ONLINEBLOCK_ERR = 0 or PowerUpMODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOTransducer Block(FETxxxx_TR):BLOCK_ERR = 0MODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOPRIMARY_V ALUE.STATUS = Good_NonCascade.NonSpecificPRIMARY_V ALUE_RANGE.UNITS = m3/sAnalog Input Block(FETxxxx_AI):BLOCK_ERR = 0MODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOCHANNEL = 1L_TYPE = IndirectXD_SCALE.UNITS_INDEX = m3/h2.6.2、EJA压力变送器Resource Block(PTxxxx_RB):RS_STATE = ONLINEBLOCK_ERR = 0 or PowerUpMODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOTransducer Block(PTxxxx_TR):BLOCK_ERR = 0MODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOPRIMARY_V ALUE.STATUS = Good_NonCascade.NonSpecificPRIMARY_V ALUE_RANGE.UNITS = MPaAnalog Input Block(PTxxxx_AI):BLOCK_ERR = 0MODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOCHANNEL = 1L_TYPE = DirectXD_SCALE.UNITS_INDEX = MPa2.6.3、Fisher阀门定位器Resource Block(FV/PVxxxx_RB):RS_STATE = ONLINEBLOCK_ERR = 0 or PowerUpMODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOTransducer Block(FV/PVxxxx_TR):BLOCK_ERR = 0MODE_BLK.TARGET = AUTOMODE_BLK.ACTUAL = AUTOPRIMARY_V ALUE.STATUS = Good_NonCascade.NonSpecificPRIMARY_V ALUE_RANGE.UNITS = %Analog Output Block(FV/PVxxxx_AO):BLOCK_ERR = 0MODE_BLK.TARGET = Cas/AutoMODE_BLK.ACTUAL = Cas CHANNEL = 1L_TYPE = DirectXD_SCALE.UNITS_INDEX = %4、气动调节阀标定过程仅当替换了某个气动调节阀的Fisher智能定位器时,才需要重新标定调节阀。
直流电机调速电路原理详解
直流电机调速电路原理详解
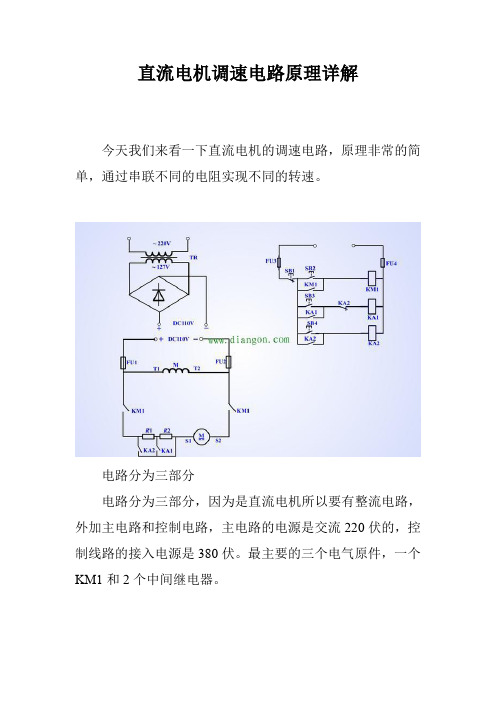
今天我们来看一下直流电机的调速电路,原理非常的简单,通过串联不同的电阻实现不同的转速。
电路分为三部分
电路分为三部分,因为是直流电机所以要有整流电路,外加主电路和控制电路,主电路的电源是交流220伏的,控制线路的接入电源是380伏。
最主要的三个电气原件,一个KM1和2个中间继电器。
三部分电路
电源是交流220伏,经过变压器变为交流127伏,再经过整流电路变为直流110伏。
三个按钮开关控制三个速度,当按下SB2的时候,接触器KM1自锁,这时候等于电机串了R1R2两个电阻,是最低速状态。
最低速的电流走向
如果想增加速度,可以按下按钮开关SB3,这时候继电器KA1会自锁。
同时它的常开点会闭合,电流跳过R2直接连接电机,实现了加速。
中速的电流走向
需要最快速就按下按钮开关SB4,这时候KA2自锁,同时它的常闭点断开使KA1断电,常开点闭合直接跳过R1电阻。
高速的电流走向
完全的实物接线
接触器的符号是KM,中间继电器的符号是KA,其实图中的KA1和KA2是2个中间继电器,当然也可以用接触器代替,必须和KM1的线圈电压保持一致。
怎么排查故障
KM1和KA1和KA2都有自锁的状态,如果实际应用中哪个元件不工作,就单独检查对应的自锁电路。
a型泵工作原理
a型泵工作原理
A型泵是一种能将流体从低压区域转运到高压区域的设备。
其工作原理基于叶片与泵壳之间的密封空间,利用叶片在旋转时产生的离心力将流体抽入泵腔,并通过离心力将流体从进口处推向出口处。
具体工作过程如下:
1. 初始状态下,A型泵的叶片与泵壳之间形成一个密封的空间。
2. 当泵的电机启动后,叶片开始旋转。
随着叶片的旋转,泵的进口处压力下降,形成一个低压区域。
3. 由于压力差,流体从进口处进入泵腔。
叶片的离心力使得流体沿着泵壳内壁形成一个旋涡,增加了泵腔内流体的速度。
4. 随着叶片的继续旋转,离心力逐渐增大,将流体从泵腔的进口处推向出口处。
5. 流体经过出口处后,泵的工作完成,流体被送往高压区域。
需要注意的是,A型泵的工作原理并不适用于含有固体颗粒或高粘度流体的情况。
此外,泵的旋转速度和叶片形状也会影响泵的工作效率和性能。
AVIDSEN 电动门吊门电机说明书
4. Essais de fonctionnement : Afin de se familiariser avec l’automatisme et de vérifier son bon fonctionnement, lire le chapitre concernant l’utilisation et effectuer des essais de fonctionnement (ouverture/fermeture, provoquer une détection d’obstacle, couper le faisceau de photocellules). A l’issue de ces essais, il pourra être nécessaire de modifier certains réglages (la force du moteur notamment) et de refaire un auto-apprentissage.
Câble 2 x 0.5mm2 Câble téléphonique 4 brins Câble téléphonique 4 brins
1
Longueur maxi Non limitée 15m 10m 10m
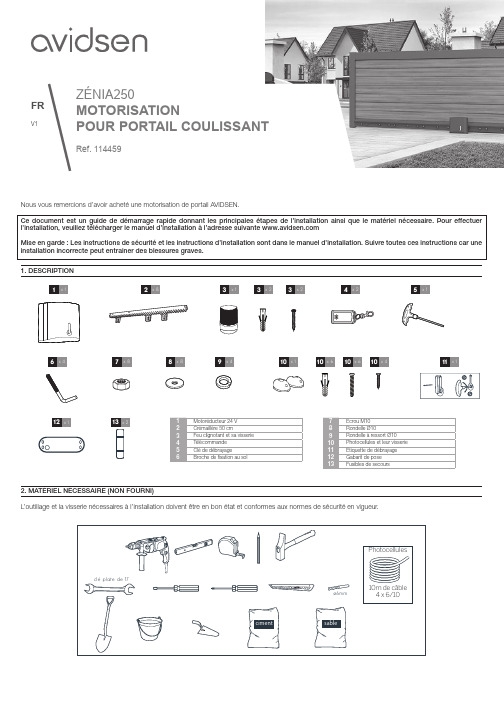
L’installation se résume en 4 étapes : 1. Pose du motoréducteur avec construction d’un socle en béton au préalable si nécessaire. Pose des crémaillères et du feu clignotant.
1. DESCRIPTION 1 x1
2 x8
3 x1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机原理及使用说明一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。
产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有0.1N·M~40N·M。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用A-AB-B-BC-C-CA-A 这种导电状态,这样将原来每步1/3て改变为1/6て。
甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。
并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。
只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。
3、力矩:电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力F与(dФ/dθ)成正比S其磁通量Ф=Br*SBr为磁密,S为导磁面积F与L*D*Br成正比L为铁芯有效长度,D为转子直径Br=N·I/RN·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。
力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
(二)感应子式步进电机1、特点:感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。
因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
感应子式步进电机某种程度上可以看作是低速同步电机。
一个四相电机可以作四相运行,也可以作二相运行。
(必须采用双极电压驱动),而反应式电机则不能如此。
例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C=,D=.一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类感应子式步进电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。
以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。
此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。
虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过份采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、步进电机动态指标及术语:1、步距角精度:步进电机每转过一个步距角的实际值与理论值的误差。
用百分比表示:误差/步距角*100%。
不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步:电机运转时运转的步数,不等于理论上的步数。
称之为失步。
3、失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5、最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
6、运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。
如下图所示:其它特性还有惯频特性、起动频率特性等。
电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。
如下图所示:其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。
要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
7、电机的共振点:步进电机均有固定的共振区域,二、四相感应子式步进电机的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
8、电机正反转控制:当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CA-BC-AB或()时为反转。
三、驱动控制系统组成使用、控制步进电机必须由环形脉冲,功率放大等组成的控制系统,其方框图如下:1、脉冲信号的产生。
脉冲信号一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则越大。
2、信号分配我厂生产的感应子式步进电机以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍二种,具体分配如下:二相四拍为,步距角为1.8度;二相八拍为,步距角为0.9度。
四相电机工作方式也有二种,四相四拍为AB-BC-CD-DA-AB,步距角为1.8度;四相八拍为AB-B-BC-C-CD-D-AB,(步距角为0.9度)。
3、功率放大功率放大是驱动系统最为重要的部分。
步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。
平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。
因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。
为尽量提高电机的动态性能,将信号分配、功率放大组成步进电机的驱动电源。
我厂生产的SH系列二相恒流斩波驱动电源与单片机及电机接线图如下:说明:CP 接CPU脉冲信号(负信号,低电平有效)OPTO 接CPU+5VFREE 脱机,与CPU地线相接,驱动电源不工作DIR 方向控制,与CPU地线相接,电机反转VCC 直流电源正端GND 直流电源负端A 接电机引出线红线接电机引出线绿线B 接电机引出线黄线接电机引出线蓝线步进电机一经定型,其性能取决于电机的驱动电源。
步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。
电压对力矩影响如下:4、细分驱动器在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。
四、步进电机的应用(一)步进电机的选择步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。
一旦三大要素确定,步进电机的型号便确定下来了。
1、步距角的选择电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。