13控制器结构
电动车控制器的工作原理
电动车控制器的工作原理电动车控制器是电动车的重要组成部分,它负责控制电动车的速度、转向和制动等功能。
本文将详细介绍电动车控制器的工作原理,包括其基本原理、电路结构和工作流程。
一、基本原理电动车控制器的基本原理是通过控制电流的大小和方向来控制电动机的转速和转向。
电动车控制器采用了先进的电子技术,通过对电流的精确控制,实现对电动机的精准控制。
控制器内部包含了微处理器、功率开关器件、传感器和驱动电路等组件,通过这些组件的协同作用,实现对电动车的全面控制。
二、电路结构电动车控制器的电路结构复杂且多样化,但通常包括以下几个部分:1. 电源电路:用于提供控制器所需的电源电压。
通常采用直流电源,可以是电池组或者外部电源适配器。
2. 控制电路:包括微处理器、传感器和驱动电路等组件。
微处理器是控制器的核心部分,负责接收和处理各种输入信号,并输出控制信号给驱动电路。
传感器用于检测电动车的状态,如转速、电流和电压等。
驱动电路根据微处理器的控制信号,控制功率开关器件的开关状态,从而控制电动机的转速和转向。
3. 功率开关电路:用于控制电流的大小和方向。
功率开关器件通常采用MOSFET(金属氧化物半导体场效应晶体管)或IGBT(绝缘栅双极型晶体管),它们具有高开关速度和低开关损耗的特点,可以实现高效率的电流控制。
4. 保护电路:用于保护控制器和电动机不受过电流、过电压和过温等因素的损害。
保护电路通常包括过流保护、过压保护、过温保护和短路保护等功能。
三、工作流程电动车控制器的工作流程可以简单描述为以下几个步骤:1. 输入信号检测:控制器首先接收来自传感器的输入信号,如电动机的转速、电流和电压等。
这些信号通过模拟转换和滤波等处理,转换为数字信号,供微处理器进行处理。
2. 控制信号生成:微处理器根据输入信号的分析和处理结果,生成相应的控制信号。
控制信号包括控制电流的大小和方向,以及控制电动机的转速和转向等。
3. 驱动电路控制:微处理器的控制信号经过驱动电路的放大和滤波等处理,驱动功率开关器件的开关状态。
1-13-冯诺依曼结构

三大思想
将指令和数据同时存放在存储器中
由运算器、控制器、存储器、输入和输 出设备五大基本部件组成计算机
冯·诺依曼结构计算机
数据 程序
输入设备
请求信号
输入命令
控制器
请求信号
输出命令
输出设备
结果
数
据
反馈信号 运算命令
取出指令 存数命令
结 果
运算器
存数 取数
存储器
控制流 数据流
(一)运算器
运算器是对数据进行处理的部件。
运算器的主要部件是算术逻辑单元,即ALU (Arithmetic Logical Unit),另
外还包括一些寄存器和其它部件。
它的基本操作是进行算术运算和逻辑运算。算术运算是按算术规则进行的运 算,逻辑运算一般指非算术性质的运算。
(二)控制器
控制器是计算机的神经中枢和指挥中心。
它按照主频的节拍产生各种控制信号,指挥计算机的有关设备协调工作,
冯·诺依曼结构
冯·诺依曼原理
冯·诺依曼原理奠定了现代计算机的基本 结构,并开创了程序设计的时代。该原理最初 是由匈牙利数学家冯·诺依曼于1945年提出来 的,故称为冯·诺依曼原理。 其核心是“存储程序”和“程序控制”。
John von Neumann (1903~1957)
冯·诺依曼思想
采用二进制
键 盘、鼠 标
扫描仪
手写板
(五)输出设备
输出设备是显示或拷贝计算机运算和处理结果的设备。最常用的输出设备
是显示器和打印机,常用的输出设备还有绘图仪等。
显示器
打印机
绘图仪
小结
计算机的工作过程可以归纳为输入、处理、输出和 存储四个过程,在程序的指挥下,计算机根据需要决定 采取哪一个步骤。 需要强调的是,计算机对于某种输入指令所要进行
APM32F103RCT7 基于 Arm Cortex-M3 内核的 32 位微控制器 数据手册说明
数据手册DatasheetAPM32F103RCT7基于Arm® Cortex®-M3内核的32位微控制器版本:V1.1产品特性⏹内核32位Arm®wCortex®-M3内核最高96MHz工作频率⏹片上存储器Flash:256KBSRAM:64KB⏹时钟HSECLK:支持4~16MHz外部晶体/陶瓷振荡器LSECLK:支持32.768KHzw晶体/陶瓷振荡器HSICLK:出厂校准的8MHzwRC振荡器LSICLK:支持40KHzwRC振荡器PLL:锁相环,支持2~16倍频⏹电源与电源管理V DD范围:2.0~3.6VV DDA范围:2.0~3.6V备份域电源V BAT范围:1.8V~3.6V支持上电/掉电复位(POR/PDR)支持可编程电源电压检测器⏹低功耗模式支持睡眠、停机、待机三种模式⏹DMA两个DMA,DMA1有7个通道,DMA2有5个通道⏹调试接口JTAGSWD⏹I/O有51个I/O所有I/O都可以映射到外部中断向量最多有29个容忍5V输入的I/O⏹通信外设2个I2C接口(1Mbit/s),全部支持SMBus/PMBus3个USART,2个UART,支持ISO7816、LIN和IrDA等功能3个SPI(18Mbps)接口,其中两个支持I2S接口复用2个CAN,支持USBD和CAN可同时独立工作1个USBD⏹模拟外设3个12位的ADC,最多支持16个外部通道2个12位的DAC⏹定时器2个可以提供7通道PWM输出的16位高级定时器TMR1/8,支持死区生成和刹车输入等功能4个16位通用定时器TMR2/3/4/5,每个定时器有4个独立通道可以用来输入捕获、输出比较、PWM与脉冲计数等功能2个16位基本定时器TMR6/72个看门狗定时器:一个独立看门狗IWDT和一个窗口看门狗WWDT1个24位自减型系统定时器SyswTickwTimer⏹RTC支持日历、闹钟功能⏹84Bytes备份寄存器⏹CRC计算单元⏹96位唯一设备ID目录产品特性 (1)产品信息 (4)引脚信息 (5)引脚分布 (5)引脚功能描述 (5)功能描述 (11)系统架构 (11)内核 (13)中断控制器 (13)片上存储器 (13)时钟 (13)电源与电源管理 (15)低功耗模式 (15)DMA (16)GPIO (16)通信外设 (16)模拟外设 (18)定时器 (18)RTC (19)CRC (20)电气特性 (21)电气特性测试条件 (21)通用工作条件下的测试 (23)绝对最大额定值 (24)片上存储器 (25)时钟 (25)电源与电源管理 (27)功耗 (28)低功耗模式唤醒时间 (35)引脚特性 (35)通信外设 (37)模拟外设 (40)封装信息 (43)LQFP64封装图 (43)包装信息 (45)带状包装 (45)托盘包装 (46)订货信息 (48)常用功能模块命名 (49)版本历史 (50)APM32F103RCT7产品功能和外设配置请参阅下表。
1313手持编程器使用手册(中文)
1313手持编程器使用手册1313手持编程器使用手册 (1)1.概述 (4)2.1313编程器操作 (6)连接 (6)编程器上电 (7)显示格式 (8)访问级别 (9)按键功能 (9)3.菜单架构 (13)菜单结构 (13)菜单项类型 (14)九大菜单 (15)4. 系统信息菜单 (16)5. 参数菜单 (17)参数菜单中的功能键 (18)6. 监控菜单 (20)监控菜单中的功能键 (20)7. 故障诊断菜单 (22)当前故障文件夹 (23)历史故障文件夹 (23)故障诊断菜单功能键 (24)8. 编程菜单 (25)“Save .cpf File”(保存.cpf文件) (26)“Restore .cpf File”(恢复.cpf文件) (29)9. 收藏菜单 (32)收藏菜单中的功能键 (33)在编程或监控菜单中使用“Add to” (33)访问收藏菜单 (34)10. 手持编程器设置菜单 (36)访问权限(Access Level) (37)语言(Language) (37)左手功能键(Left Handed Soft Key) (37)背光灯(Backlight) (37)按键音效(Keytone) (37)自动关机(电池供电)(Auto Poweroff battery) (38)自动关机(控制器供电)(Auto Poweroff ext) (38)向左按键退出菜单(Exit menus with left arrow) (38)允许截屏(Enable Screenshot) (38)电池电压低显示(Show only empty battery) (38)另存默认字段(Text for save as) (39)键盘使用帮助文本(Keyboard help text) (39)记录上次显示(Remember Last View) (39)按删除缓存文件(Delete Cache File) (39)日期和时间(Date & Time) (40)关于(About) (40)编程器设置菜单功能键 (40)11. 文件管理 (41)文件管理菜单中的功能键 (42)12. 绘图和日志 (43)日志 (44)绘图 (44)13. 键盘使用 (46)键盘显示的可变功能键 (46)14. 截屏 (48)15. 离线工作 (49)编程器未连接 (49)编程器连接控制器但控制器没上电 (50)编程器连上已经运行的控制器 (51)1.概述科蒂斯1313手持编程器用于配置科蒂斯电机控制系统。
1模糊控制器的基本结构

1第 13 章模糊控制理论13.1 模糊控制器的基本结构本章将介绍模糊控制 (fuzzy control)的基本原理、结构分析、稳定性理论和设计方法。
模糊控制器的基本结构如图 13.1 所示。
图 13.1 中,u t是 SISO 被控对象的输入, y t是被控对象的输出, s t是参考输入, e ts t y t是误差。
图中虚线框内的就是模糊控制器 (FC),它根据误差信号 e t产生合适的控制作用 u t,输出给被控对象。
模糊控制器主要由模糊化接口、知识库、模糊推理机、解模糊接口四部分组成,各部分的作用概述如下。
1.模糊化 (Fuzzification)模糊化接口接受的输入只有误差信号e t,由 e t再生成误差变化率e t或误差的差分e t,模糊化接口主要完成以下两项功能。
⑴论域变换: e t和 e t都是非模糊的普通变量,它们的论域(即变化范围)是实数域上的一个连续闭区间,称为真实论域,分别用X 和Y 来代表。
在模糊控制器中,真实论域要变换到内部论域X和Y。
如果内部论域是离散的(有限个元素),模糊控制器称为“离散论域的模糊控制器” (D-FC),如果内部论域是连续的(无穷多个元素),模糊控制器称为“连续论域的模糊控制器” (C-FC)。
对于 D- FC,X,Y={0 ±整数 } ;对于 C— FC,X,Y= [-l ,1]。
无论是 D-FC 还是C-FC,论域变换后 e t, e t变成 e t, e t,相当乘了一个比例因子(还可能有偏移)。
⑵模糊化:论域变换后 e t和 e t仍是非模糊的普通变量,对它们分别定义若干个模糊集合,如:“负大”(NL) 、“负中”(NM) 、“负小”(NS)、“零” (Z) 、“正小” (PS)、“正中”(PM) 、“正大” (PL) ,, ,并在其2内部论域上规定各个模糊集合的隶属函数。
在 t 时刻输入信号的值 e t ,e t 经论域变换后得到 e t ,e t ,再根据隶属函数的定义可以分别求出 e t , e 对各模糊集合的隶属度,如 (e ) 、 (e ) 、 , ,这样就把普通tNLtNMt变量的值变成了模糊变量(即语言变量)的值,完成了模糊化的工作。
hg-kr13工作原理
hg-kr13工作原理HG-KR13是一种高精度、高性能的工业机器人,广泛应用于自动化生产线。
它的工作原理基于先进的控制系统和精密的机械结构。
1. 控制系统:HG-KR13采用了先进的控制系统,包括主控板、电源模块、伺服控制器等。
主控板负责接收指令和传输控制信号,电源模块为机器人提供稳定的电力供应,伺服控制器负责控制机器人的运动。
2. 机械结构:HG-KR13的机械结构由多个关节和连接部件组成,具有六个自由度。
每个关节都由电机驱动,通过传动机构使机器人的各个部件实现精确的运动。
3. 运动控制:HG-KR13采用了先进的运动控制算法,可以精确控制机器人的位置、速度和力量。
通过传感器和编码器等装置,机器人可以实时感知自身的状态,根据指令调整运动轨迹和力量输出。
4. 程序控制:HG-KR13可以通过编程来实现各种复杂的任务。
用户可以使用专门的编程语言或者图形化编程软件,编写程序来控制机器人的动作和操作。
程序中可以包含各种逻辑判断和运算,使机器人能够根据不同的情况做出相应的动作。
5. 安全保护:HG-KR13配备了多种安全保护装置,确保机器人在工作过程中不会对人员和设备造成伤害。
例如,机器人可以通过激光传感器或摄像头等设备实时感知周围环境,避免与障碍物碰撞。
此外,机器人还可以通过力传感器等装置感知外部力量,及时停止或调整动作,以保护人员和设备的安全。
6. 应用领域:HG-KR13广泛应用于各种自动化生产线,如汽车制造、电子设备生产、食品加工等。
它可以完成各种精密的组装、焊接、搬运等任务,提高生产效率和产品质量。
在实际应用中,HG-KR13的工作原理可以通过以下步骤来描述:首先,用户编写机器人需要执行的任务程序,并将程序加载到机器人的控制系统中。
然后,机器人根据程序的指令,通过控制系统控制各个关节的运动,实现机械臂的精确定位和运动。
在运动过程中,机器人可以通过传感器等设备感知外部环境和自身状态,根据需要调整运动轨迹和力量输出。
JKKZ10-13多功能控制器

JKKZ10-13多功能控制器
JKKZ10-13多功能控制器详细说明
JKKZ10-13多功能控制器的专业生产销售厂家:河南兄弟仪器设备有限公司。
JKKZ10-13多功能控制器是兄弟仪器设备有限公司主推的品牌产品之一,历经市场检验,畅销全国!
一、用途
用于各种电炉、干燥箱、水浴等加热设备的温度控制。
二、产品特点:
蓝屏背光液晶显示,汉字屏幕,直观易懂,采用先进的模糊PID智能调节换法,无超调,具备自整定(AT)、定时关机、报警灯提示功能及功率状态显示、防止断电回复或因故障停机误启功能。
可根据需要更换30(60)段程序表、输出模块、热电偶……
三、技术参数:
1.输入电压:AC-380V(三相)
2、输入电压:40-380V(二相)
3、最大输出电流:3X50
4、控温范围:300℃-1300℃
5、控温精度:±1℃
6、分度号:S
7、功率:10KW
河南兄弟仪器设备有限公司依靠自身强大的社会资源、品牌优势、经营优势,以优于市场的JKKZ10-13多功能控制器的价格向广大新老顾客朋友提供价格实惠、品质优良的该仪器设备;河南兄弟仪器设备公司拥有最齐全的JKKZ10-13多功能控制器的型号,欢迎新老顾客朋友订购。
河南兄弟仪器设备公司承诺以最新JKKZ10-13多功能控制器的报价、最完善的服务回报顾客朋友。
兄弟仪器设备公司希望早日与您结下兄弟情谊!。
单片机CPU的内部结构

• 最大模式:存储器与IO读写 信号由总线控制器产生,要 较多外围芯片。
• 最小模式:存储器与I/O读写 信号由CPU直接提供,外围 芯片较少。
联合使用。CPU每5个
10
时钟时钟周期检测一次
11
12
TEST信号,如高,继
13
续执行WAIT,否则, 跳过WAIT指令,执行
14 15 AD0 16
后续指令。
NMI 17 INTR 18
Intel 8088
33 32 31 30 29 28 27 26 25 24 23 TEST
• 可用来支持实现多CPU 协同工作。
14
) DF:方向标志,用来控制串操作指令的执 行。
– DF=0则串操作指令的地址自动增量; – 若DF=1,则自动减量。
) IF:中断标志,用来控制对可屏蔽中断的响 应。
– IF=1, 则允许CPU响应可屏蔽中断; – IF=0,则CPU不能响应可屏蔽中断。
) TF:单步标志。
– 若TF=1,则CPU进入单步工作方式,即CPU每执 行一条指令就自动产生一次内部中断;
Intel 8088
40 39 A15 38 A16/S3 37 36 35 A19/S6 34 33 32
31
30 29 28 27 26 25 24 23
共20根地址线,寻址空间
19 20
21
为:220=1M
22
21 22
1
40
数据总线
A14 2 3
39 A15 38 A16/S3
4
37
分时输出的AD0~AD7,
5第一节cpu的内部逻辑结构一cpu的组成和功能1cpu的组成cpu主要由运算器控制器寄存器组和片内总线等组成2cpu的功能1指令控制2操作控制3时序控制4执行指令5数据加工运算2eu20位地址ahalbhbl加法器biuchcldhdlspesbpds总线siss控制csipdi逻辑数据算逻部件执行部件控制123456标志寄存器系统指令队列8086微处理器的内部结构4具体的说地址加法器将段寄存器16位的内容左移4位然后与指令指针寄存器ip的内容相加得到20位的物理地址
CVI3拧紧控制器安装和升级手册说明书

硬件安装 .............................................................................. 10 安装控制器、工具和配件............................................................ 10 技术数据 ................................................................... 10 建议安装顺序 ............................................................... 13 安装控制器 ................................................................. 13 连接线缆工具 ............................................................... 26 将无线缆工具连接到 CVI3 Vision ............................................. 28 安装eBUS配件 ............................................................... 32 安装ePOD ................................................................... 43 安装现场总线模块 ........................................................... 44 安装外围设备 ............................................................... 44 将控制器连接到电源 ......................................................... 45 打开/关闭控制器电源 ........................................................ 46 如何设置网路 ............................................................... 47 如何将 CVI3 控制器连接到计算机 ............................................. 49 安装连接到以太网的完整解决方案 ............................................. 49
13个基于PID控制器的设计实例

13个基于PID控制器的设计实例
PID 控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元比例P(proportion)、积分单元I(integration)和微分单元D(differentiation)组成。
PID 控制器作为最早实用化的控制器已有近百年历史,现在仍然是应用最广泛的工业控制器。
PID 控制器简单易懂,使用中不需精确
的系统模型等先决条件,因而成为应用最为广泛的控制器。
PID 控制的原理及常用口诀总结
基于AT89S51 单片机的PID 温度控制系统设计
本文对系统进行硬件和软件的设计,在建立温度控制系统数学模型的基
础之上,通过对PID 控制的分析设计了系统控制器,完成了系统的软、硬件调试工作。
算法简单、可靠性高、鲁棒性好,而且PID 控制器参数直接影响控制效果。
基于ARM 与PID 算法的开关电源控制系统
本文将SAMSUNC 公司的嵌入式ARM 处理器S3C4480 芯片,应用到开关电源的控制系统的设计中,采用C 语言和少量汇编语言,就可以实现一种以嵌入式ARM 处理器为核心、具有智能PID 控制器以及触摸屏、液晶显示器等
功能的开关电源控制系统。
基于DSP 的电子负载:模糊自适应整定PID 控制策略
本系统引入模糊控制理论设计一个模糊PID 控制器,根据实时监测的电压或电流值的变化,利用模糊控制规则自动调整PID 控制器的参数。
基于FPGA 的高速PID 控制器设计与仿真
本设计使用Altera 公司的Cyclone 系列FPGA 器件EP1C3 作为硬件开发平台,对运动控制中常用的增量式数字PID 控制算法进行优化处理,提高了运。
CNG加气站组成系统及其功能
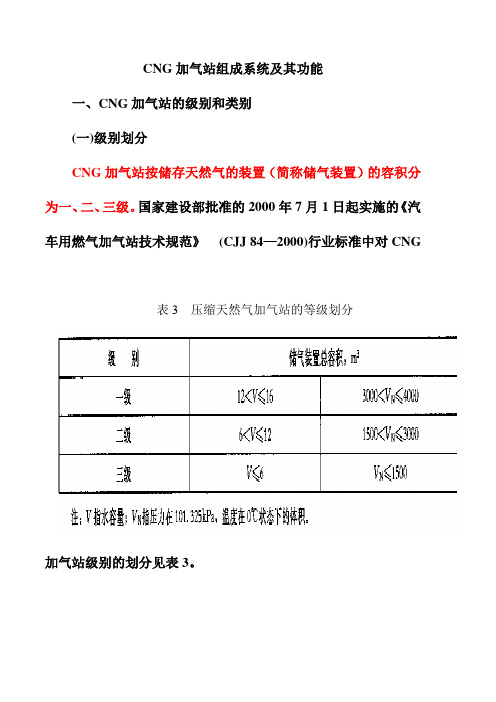
CNG加气站组成系统及其功能一、CNG加气站的级别和类别(一)级别划分CNG加气站按储存天然气的装置(简称储气装置)的容积分为一、二、三级。
国家建设部批准的2000年7月1日起实施的《汽车用燃气加气站技术规范》(CJJ 84—2000)行业标准中对CNG表3 压缩天然气加气站的等级划分加气站级别的划分见表3。
不同级别的CNG加气站每天可加气车次范围见表4,以供建站参考(每辆车按5瓶×50L/瓶加气计算)。
表4 加气车次范围表(二)类别划分按加气站功用的不同,可划分为三种类型,即可分为叫CNG 母站、CNG子站及我们常见到的能独立营运的规模不超过规定级别的加气站,即所谓常规站。
二、天然气的净化未经过处理的天然气中都含有硫、水和其他杂质,这些杂质不仅会影响天然气的热值及辛烷值,还会影响管道、加气站设备和天然气汽车的安全,所以必须对进入加气站的天然气在压缩前和压缩后进行净化处理。
净化过程也称为“三脱”,即脱水、脱烃、脱硫。
**脱水,即去除天然气中的水分,使含水量﹤16mg/m3。
以防止压缩机在减压膨胀降温过程中对供气系统造成冰堵。
脱烃,即脱去天然气中的轻烃,使乙烷及重烃含量﹤3%.以防止发动机点火燃烧不正常。
脱硫,即脱除天然气中的硫化氢等酸性气体,使其分压≤0,35kPa,以防止对设备管线和储气瓶的腐蚀。
此外,对于有油润滑的压缩机而言,还存在一个脱油问题。
三、加气站分类前巳述及,压缩天然气是最普遍与最实用的储存方式。
因此,本章所述的加气站也即压缩天然气加气站或简称CNG加气站。
人们常按加气站的不同特征对它进行分类或命名.以便于研究与称呼。
(一)按加气站设备的总体设置分类(1)固定站房式加气站它将压缩机安装在固定厂房内.压缩机与中间冷却器可以制成撬装式或者设置专门基础安装压缩机,其他设备可设在厂房内,也可没在厂房外。
也可将加气站与加油站设计在同—处,以便于用户任意加气或加油.这类形式的加气站显得比较宽敞美观,机器设备维修比较方便,但占地面积相对较大。
电动车控制器原理及电路图1
电动车控制器原理及电路图2008-10-29 15:27控制器原理及电路图车用电机控制器近年来的发展速度之快,使人难以想象,操作上越来越“傻瓜”化,而显示则越来越复杂化。
比如,车速的控制已经发展到“巡航锁定”;驱动方面,有的同时具有电动性能和助力功能,如果转换到助力状态,借助链条张力测力器,或中轴扭力传感器,只要用脚踏动脚蹬,便可执行助力或确定助力的大小。
这期本刊开始给您讲述控制器的知识,让您对控制器有一个更全面的了解。
一、控制器与保护功能(一)控制器简介简略地讲控制器是由周边器件和主芯片(或单片机)组成。
周边器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电路功率管导通或截止、通过方波控制功率管的的导通时间以控制电机转速的驱动电路、输入输出端口等集成在一起,而构成的计算机片。
这就是电动自行车的智能控制器。
它是以“傻瓜”面目出现的高技术产品。
控制器的设计品质、特性、所采用的微处理器的功能、功率开关器件电路及周边器件布局等,直接关系到整车的性能和运行状态,也影响控制器本身性能和效率。
不同品质的控制器,用在同一辆车上,配用同一组相同充放电状态的电池,有时也会在续驶能力上显示出较大差别。
(二)控制器的型式目前,电动自行车所采用的控制器电路原理基本相同或接近。
有刷和无刷直流电机大都采用脉宽调制的PWM控制方法调速,只是选用驱动电路、集成电路、开关电路功率晶体管和某些相关功能上的差别。
元器件和电路上的差异,构成了控制器性能上的不大相同。
控制器从结构上分两种,我们把它称为分离式和整体式。
1、分离式所谓分离,是指控制器主体和显示部分分离(图4-22、图4-23)。
后者安装在车把上,控制器主体则隐藏在车体包厢或电动箱内,不露在外面。
控制器工作原理

控制器工作原理控制器是现代自动化系统中不可或缺的部分,它起着控制和调节系统运行的重要作用。
在工业、交通、家居等各个领域中,控制器被广泛应用于各种设备和系统中,使其能够实现精确的控制和调节。
本文将介绍控制器的工作原理,重点探讨控制器的基本原理和核心组成部分。
控制器的基本原理是通过采集感知信息,进行处理和判断,并输出控制信号,以实现对被控制对象的控制。
其中,感知信息包括温度、湿度、压力、流量等物理量的测量结果,以及开关状态、位置反馈等逻辑信息。
这些感知信息通过传感器采集,并经过信号变换和处理,得到与实际情况相对应的数字或模拟信号。
控制器的核心部分是处理器或微控制器,它负责接收和处理感知信息,并根据事先设定的控制算法进行运算和判断。
处理器通过数字信号处理和逻辑运算,对采集的感知信息进行加工和分析,得出控制行为和决策策略。
控制算法可以基于经验规则,也可以基于数学模型和控制理论进行设计。
控制器的性能和稳定性很大程度上取决于控制算法的设计和优化。
控制器通过输出信号实现对被控制对象的控制。
输出信号经过数字模拟转换或数字输出接口,转换为与被控对象匹配的控制信号。
这些控制信号可以是电压、电流、频率、逻辑电平等形式。
通过与被控对象的接口连接,控制器将控制信号传递给被控对象,实现对其运行状态或特定参数的控制和调节。
控制器还可以通过人机界面与操作人员进行交互。
人机界面通常包括显示屏、按钮、触摸屏等,通过这些界面,操作人员可以对控制器进行设定、参数调整和监视。
同时,控制器也可以将当前状态和运行参数反馈给操作人员,以便了解系统的运行情况和变化。
除了基本的控制原理和核心组成部分,控制器还可以根据应用需求进行扩展和优化。
例如,针对高速运动系统,控制器需要具备快速响应和高精度的特性;对于复杂的多变量控制系统,控制器可能需要采用现代控制理论中的模型预测控制或自适应控制策略;对于远程监控和管理需求,控制器还可以与网络互联,实现远程控制和数据传输等功能。
13万能转换开关凸轮控制器

系列。(其中,LW9、LW12符合国际IEC标准)
IEC:
国际电工委员会(International Electro technical Commission,简称IEC) 4、使用注意事项
使用时注意各操作位置触点的分合情况。(查阅手册)
二、凸轮控制器
低压电器
万能转换开关 凸轮控制器
一、万能转换开关
1、万能转换开关的工作原理
注:每层凸轮形状不一样,以实现对每层触点的控制。
2、万能转换开关的作用 控制多回路通断。
主要用于各种配电装置的控制, 同时也作为电气测量仪表的转换开关 用作小容量电动机的启动、制动、调速和换向控制。
3、万能转换开关的型号
触点
文字符号 通断关系
四、万能开关&凸轮控制器的通断表 点: 点所在的档位 点上面的接线 端子导通
+:导通
课堂练习:列出图示主令电器通断表
课堂练习:列出图示主令电器通断表
作业:列出图示主令电器通断表
1、凸轮控制器结构 大电流
灭弧罩
2、凸轮控制器的作用
多路大电流的通断 手动操作的开关电器。 用途:用于起重机绕线式异步电动机的起 动、调速、制动控制。 型号:KT14、KT15系列 主要参数:触点的额定电流(25A、60A 或32A、63A)
三、万能开关&凸轮控制器的符号(图形和文字)
四要素:
档位
13_部署只读域控制器(RODC)
部署只读域控制器(RODC)一、简介只读域控制器是Windows Server 2008系统中的一种新类型的域控制器,借助RODC,企业可以在物理安全性无法得到保障的地方部署域控制器。
在RODC上保存了一份AD DS 的只读分区。
RODC主要设计用于部署在远程或分支机构环境中。
二、RODC的作用RODC提供了一种在要求快速、可靠的身份验证服务但不能确保可写域控制器物理安全性的位置更安全地部署域控制器的方法;某些应用程序只能安装在域控制器上,应用程序使用者经常需要以交互方式登录到域控制器对应用程序进行配置和管理,这会增加域控制器的安全风险,而部署RODC,就可以增加这方面的安全性。
三、注意事项RODC不能担任操作主机角色,也不能作为复制拓扑中的桥头堡服务器;可以在Windows Server 2008 Server Core上部署RODC以提高安全性;如果要部署RODC,在域中至少要有一台运行Windows Server 2008的可写域控制器;如果要部署RODC,域功能级别和林功能级别都必须是Windows Server 2003或更高版本;四、RODC提供的新特性只读AD DS数据库RODC上保存了可写域控制器上除帐号密码外的所有对象和属性的只读副本,所有对AD DS数据库的更改都只能在可写域控制器上进行,然后再复制给RODC;需要对目录进行读取的应用程序可以获取访问权限。
请求写入访问的轻型目录应用程序协议(LDAP)应用程序将接收LDAP引用响应,该响应将其定向到可写域控制器。
单向复制因为任何AD数据库的更改都不会写入RODC,所以可写域控制器就不需要从RODC 上复制任何信息。
RODC只执行正常的入站复制。
凭据缓存默认情况下,RODC上除了RODC的计算机帐户和特殊账户krbtgt之外,不存储用户或计算机凭据。
但可以设置密码复制策略将部分用户凭据和计算机凭据从可写域控制器复制到RODC并在RODC上缓存起来,从而直接服务登录请求。
RC13型电 脑 控 制 器

BONORC13 型 电 脑 控 制 器自动控制压缩机、冷风机及除霜可直接控制1HP以下制冷机组采用DALLAS数字式传感器 实现远距离精确测温RC13型 电 脑 控 制 器一、 用途RC13型电脑控制器适用于风冷或水冷式制冷系统。
该型控制器,设计有完整的控制工艺,保证制冷系统安全可靠的运行。
RC13型电脑控制器适用于各种制冷场所的专业控制。
RC13型电脑控制器传感器的测温距离大于500米。
二、 技术参数电源: AC/DC 12V/3VA输出及触点容量: 继电器3路 5A/250V环境温度: -10~50℃储藏温度: -20~50℃控制精度: ±0.5℃显示分辩率: 2-1/2位显示,0.1℃ (-20~+20℃)输入传感器: 1路Dallas18b20外形尺寸: 70×29×65三、 功能参数功 能 显示代码 调节范围或说明 分辩单位 随机参数 停机温度 C1 -50~50 0.1℃ 0温控范围 C2 0.1~10 0.1K 3除霜周期 C3 0~60 0.1小时 8除霜周期 C4 1~90 1.0分钟 20启动及除霜后延时 C5 0~10 0.5分钟 3压缩机最小启动间隔 C6 1~10 1分钟 3传感器偏差校正 C7 -10~10 0.1℃ 0电脑具有停电记忆功能1010秒解除除霜。
当除霜周期C3=0时,除霜功能关闭。
按 键10秒并显示P后,随机参数设定完成。
四、 功能释义功 能 释 义停机温度 C1 电脑进入停止工作状态的温度温控范围 C2 开机温度与停机温度之差除霜周期 C3 除霜继电器两次闭合之间的时间间隔除霜时间 C4 除霜继电器闭合到断开的时间启动及除霜后延时 C5 第一次上电及除霜后压缩机延时启动的时间最小启动间隔时间 C6 电脑工作后,压缩机继电器断开与闭合的最小间隔时间校正传感器偏差 C7 测量出现误差时给予校正制冷开停温度的图示说明T(℃)C1时,停机。
中控PLC-G5-G5控制系统基座使用手册

G5基座使用手册IM24H31-C 浙江中控技术股份有限公司声明⏹严禁转载本手册的部分或全部内容。
⏹在不经预告和联系的情况下,本手册的内容有可能发生变更,请谅解。
⏹本手册所记载的内容,不排除有误记或遗漏的可能性。
如对本手册内容有疑问,请与我公司联系,联系邮箱:SMS@。
商标中控、SUPCON、SPlant、 Webfield 、ESP-iSYS 、MultiF、InScan、SupField以上商标或标识均是浙江中控技术股份有限公司已经注册或已经申请注册或正在使用的商标和标识,拥有以上商标的所有权,未经浙江中控技术股份有限公司的书面授权,任何个人及企业不得擅自使用上述商标,对于非法使用我司商标的行为,我司将保留依法追究行为人及企业的法律责任的权利。
文档标志符定义警告:标示有可能导致人身伤亡或设备损坏的信息。
WARNING: Indicates information that a potentially hazardous situation which, if not avoided, could result in serious injury or death.电击危险:标示有可能产生电击危险的信息。
RISK OF ELECTRICAL SHOCK: Indicates information that Potential shock hazard where HAZARDOUS LIVE voltages greater than 30V RMS, 42.4V peak, or 60V DC may be accessible.防止静电:标示防止静电损坏设备的信息。
ESD HAZARD: Indicates information that Danger of an electro-static discharge to which equipment may be sensitive. Observe precautions for handling electrostatic sensitive devices注意:提醒需要特别注意的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TI/ FTI TD / TD F
KI K F KD / KD F
16
(5)输出电路
浙江大学信息学院控制系
—过程控制基础及应用—
—电压-电流转换电路 作用: 将比例积分电路输出的以UB 为基准的1~5VDC电压信号U03转 换为流过负载RL(一端接地)的 4~20mADC输出电流I0 定性分析:
UB
22
浙江大学信息学院控制系
—过程控制基础及应用—
硬手操电路
CM RF UH
RH
- +
U03
WH
UB
23
浙江大学信息学院控制系
—过程控制基础及应用—
CM
1
U 03 ( S ) C S ?? M U H (S ) RH
// RF
UH
RF RH
-
+
U03
RF 1 ( ) RH 1 RF CM S
—过程控制基础及应用—
实际PI:
CI 1 (1 ) CM TI S U 03 ( s) U 02 ( s) C 1 1 1 (1 I ) A3 CM A3 RI C M S
1 C TI S I 1 CM 1 K I TI S 1
TI mRI CI
W PI ( S )
CM
③→H: 必须进行预平衡操作,然后进行切换 UUB
25
(7)指示电路
浙江大学信息学院控制系
—过程控制基础及应用—
作用:把1~5V输入转化成1~5mA的电流信号,该电 流通过动圈表头指示出来。
浙江大学信息学院控制系
—过程控制基础及应用—
复
P :△u =KPe
作用及时
习
e
δ
t
KP At TI
I : △u =1/ TI ∫ edt
消除余差
△u
t=0
KPA(KD -1)
A
KpA
de D : △u = TD dt
超前作用
t
de 1 △u =Kp(e + ) edt +TD dt TI
1
浙江大学信息学院控制系
U01
浙江大学信息学院控制系
—过程控制基础及应用—
U 02 UT
△U01
t
UT △U01
1 U 01 n
t
UO2
t
10
浙江大学信息学院控制系
—过程控制基础及应用—
2、传递函数
U F ( S )
1
U 02 ( S )
1 n 1 RD U T ( S ) U 01 ( S ) U 01 ( S ) n n R 1 D CD S
显示调节器输出信号的大小,习惯上输 出显示表也称作阀位表。 给定信号可以由调节器内部产生, 也可以由其它仪表外部提供
3
浙江大学信息学院控制系
—过程控制基础及应用—
内给定的调整 正、反作用的选择 手/自动双向切换
若设定值为内给定,用户可以调整调 节器上的内给定拨盘来改变设定值 何谓正作用?何谓反作用? 何谓手动?何谓自动?为什么要进行手 自动切换? 可以调整手操拨盘或者手操扳键来改变控 节器的输出 手自动切换时都希望不给控制系统带来扰 动,即控制器的输出信号不发生突变(即 必须要求无扰动切换)
—过程控制基础及应用—
一般控制器还需要具备如下功能,以适应自动控制的需要:
偏差指示
指示偏差信号
模拟调节器——指针式表头
全刻度指示:输入信号和设定值分别由不同的指针在 0~100%范围指示 偏差值指示:仅利用一个指针来指示偏差信号±30%
数字控制器——通过LED或者液晶屏显示
输出显示 内、外给定的选择
—过程控制基础及应用—
数字控制器外形图
6
浙江大学信息学院控制系 —过程控制基础及应用— 第二节 DDZ―Ⅲ型电动调节器
基型调节器的构成方框图
7
浙江大学信息学院控制系
基型调节器的电路分析
—过程控制基础及应用—
(1)输入电路 实际是偏差差动电平移动电路 作用 : ①是偏差检测与放大; ②是电平移动
目的:
/
浙江大学信息学院控制系
—过程控制基础及应用—
e 1 / K p (1 / T s )1 T S D 1 t D TI U s01 Ui 1 U02 W ( s ) e T -2 CPI U03 n / D PD 电路 I 电路 TI S t=0 1 S T - 输入电路 1 / /C KD 1 / / D/ s △ u KP KD AM 1 1 K / K / A TI K I s K D K I TI S P I US F
18
(6)手操电路
浙江大学信息学院控制系
—过程控制基础及应用—
手操电路的作用是实现手动操作,它有软手操与硬手操两种操作方式
硬手操的操作旋钮
19
浙江大学信息学院控制系
—过程控制基础及应用—
软手操电路
S41
RM1 -VR RM1 +VR RM2 RM2 S42 S43 S44
- +
CM
U03
UB
当S41按下时:
U 03 I ( s) U 02 ( s) 1 RI CM S m
PI运算(理想):
CI 1 U 03 ( s) (1 )U 02 ( s) CM m RI C I S
U 03 ( s)
CI 1 (1 )U 02 ( s) CM TI
13
浙江大学信息学院控制系
① 是为了消除集中供电引 入的误差。 ② 是为了保证运算放大器 的正常工作
Ii
250Ω RCM
8
浙江大学信息学院控制系
同相端电压
1 U T (U S U CM ! U CM 2 U B ) 3
正反作用切 换开关
R1
Ui R2
—过程控制基础及应用—
R5
K
- +
U01 R7
0.47~2.33V 反相端电压 ↓ 1 1 U F (U i U CM ! U CM 2 U 01 U B ) 3.8~ 3 25.66V
A3C M KI m CI
当 KI → ∞时为理想情况
14
浙江大学信息学院控制系
—过程控制基础及应用—
阶跃输入响应时间函数
U 03
t=0+ :
CI [ K I ( K I 1)e CM
CI U 03 U 02 CM CI U 03 K I U 02 CM
U 04 If R23
U 03 RH R23 I0 ( ) R R24 RH
当U03= 1~5V时, I0 = 4~20mA UB = 10V ,UE =24V,UF =21.2V;
U03 = 5V 时,U04 =23.75V; 选择A4应同时满足共模输入电压及最大输出范围的要求
U03↑→ UF ↑ → A4输出↓ → IC1 ↑ → IC2 ↑ → I0 ↑ (直至UF =UT )UF ↓
定量分析: I 0 = I /0 - I f
17
U04 ↓
浙江大学信息学院控制系
差动输入运算放大器
U 04 R23 U 03 R R24
U 04 I0 RH
/
—过程控制基础及应用—
KD
[1 ( K D 1)e
]U 01
t=0+
:
U 02 U 01
U 02
t=∞ :
KD
1 T
U 02 ( S )
U 01
KD
TD t : KD
(t=T)
U 02 0.368
UO2
KD 1 U 01 U 01 KD KD
1 TD S U 01 ( S ) T 1 D S KD
快速上升 慢速上升
U 03 ( S ) 当S42按下时:
U 03
U 03 ( S ) 当S43按下时:
U 03
快速下降
U 03 ( S ) 当S44按下时:
U 03
慢速下降 21
浙江大学信息学院控制系
—过程控制基础及应用—
扳键S4扳向软手操输入电压+UR一侧时,+VR通过由RM、CM和A3 组成的积分电路使U03线性下降; 当扳键S4扳向-UR一侧时,U03线性上升。 按下扳键S4的时间越长, U03的改变越大
手动操作 无扰动切换
Kp/Ti/Td的设置
改变控制器的特性
4
浙江大学信息学院控制系
—过程控制基础及应用—
1
模拟控制器外形图
2 3
4
5
6 7
6
DDZ-III型调节器正面图 1-位号牌 2-内外给定指示 3-内给定设定拨盘 4-A/M/H切换 5-阀位表 6-软手动操作扳键 7-双针全刻度指示表
5
浙江大学信息学院控制系
UCM1
R3 US R6 R4 UCM2 UB
U/01 R8
U01= -2(Ui-Us)
结论:
U01=
2(Ui-Us)
①二倍偏差放大。 ② 输出只与偏差有关,与线路上的压降无关。 ③将与零伏为基准的输入信号,变成与10伏为基准的输出。 9 U01变化范围:-8~+8V。
(2)比例微分电路
1、工作原理 1 U F U 02
—过程控制基础及应用—
控制器介绍 控制器的作用是将被控变量测量值与结定值进 行比较,然后对比较后得到的偏差进行比例、积分、 微分等运算,并将运算结果以一定的信号形式送往 执行器,以实现对被控变量的自动控制。