(斜拉桥缆索机器人的发展)Development of cable maintenance robot for cable-stayed bridges
斜拉桥发展史及现状综述

从斜拉桥看桥梁技术的发展姓名:马哲昊班级:1403专业:建筑与土木工程学号:143085213086摘要: 介绍了国内外斜拉桥的发展历史,综述了现今斜拉桥发展的现状,并分析了斜拉桥的结构形式和布置形式及其经济效益,并简述了其中的桥梁技术,对今后斜拉桥的发展做出展望。
关键词: 斜拉桥;发展史;现状;展望Abstract: the paper introduces the domestic and foreign in recent decades history of Cable-stayed bridge.the paper summarized the The structure of cable-stayed bridge and the Economic benefits and Introduced the technology of it.the direction of further research in the future was put forward.Key words: Cable-stayed bridge; Review; Looking forward to1.斜拉桥的发展1.1 斜拉桥的历史斜拉桥是一种古老而年轻的桥型结构。
早在数百年前,斜拉桥的设想和实践就已经开始出现,例如在亚洲的老挝,爪哇都发现过用藤条和竹子架设的斜拉结构人行桥。
在古代,世界各地也都出现过通行人、马等轻型荷载的斜拉结构桥梁在 18 世纪,德国人就曾提出过木质斜张桥的方案,1817 年英国架成了一座跨径为 34m 的人行木质斜张桥,该桥的桥塔采用铸铁制造,拉索则采用了钢丝。
以后在欧洲的很多国家都先后出现了一些斜拉桥,如 1824 年,英国在 Nienburg 修建了一座跨径为 78m 的斜拉桥,拉索采用了铁链条和铸铁杆,后来由于承载能力不足而垮塌。
1818 年,英国一座跨越特威德河的人行桥也毁于风振。
斜拉桥
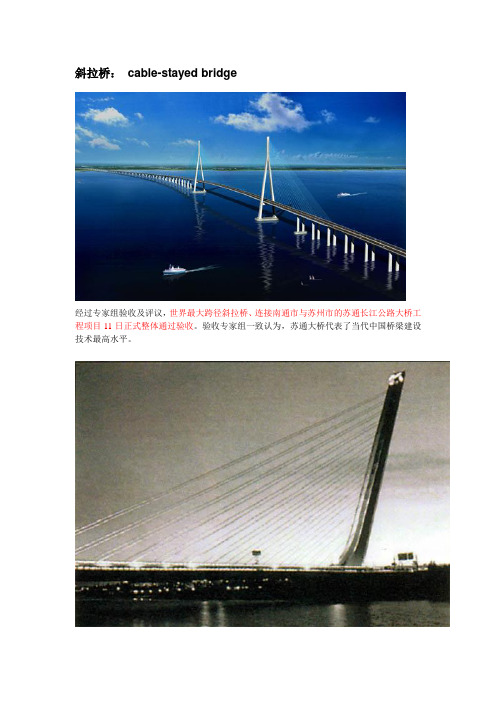
斜拉桥:cable-stayed bridge经过专家组验收及评议,世界最大跨径斜拉桥、连接南通市与苏州市的苏通长江公路大桥工程项目11日正式整体通过验收。
验收专家组一致认为,苏通大桥代表了当代中国桥梁建设技术最高水平。
西班牙在塞维利市建设的单侧索斜拉桥,是以1993年世界展览会的会标造型设计而成。
该桥的奇特造型给人以优美的印象,但由于它违背了斜拉桥结构受力的平衡原理,与拉索的平衡全部依靠塔后倾及塔下巨大基础承受,使整座桥造价极为昂贵,原计划建一座对称的孪生桥,后因经济原因没能实现。
又称斜张桥,是将桥面用许多拉索直接拉在桥塔上的一种桥梁,是由承压的塔,受拉的索和承弯的梁体组合起来的一种结构体系。
其可看作是拉索代替支墩的多跨弹性支承连续梁。
其可使梁体内弯矩减小,降低建筑高度,减轻了结构重量,节省了材料。
斜拉桥由索塔、主梁、斜拉索组成。
斜拉桥作为一种拉索体系,比梁式桥的跨越能力更大,是大跨度桥梁的最主要桥型。
斜拉桥是由许多直接连接到塔上的钢缆吊起桥面,斜拉桥由索塔、主梁、斜拉索组成。
索塔型式有A型、倒Y型、H 型、独柱,材料有钢和混凝土的。
斜拉索布置有单索面、平行双索面、斜索面等。
第一座现代斜拉桥始建于1955年的瑞典,跨径为182米。
目前世界上建成的最大跨径的斜拉桥为法国的诺曼底桥,主跨径为856米。
1993年建成的上海杨浦大桥是我国目前最大的斜拉桥,主跨径为602米。
斜拉桥发展趋势:跨径会超过10O0m;结构类型多样化、轻型化;加强斜拉索防腐保护的研究;注意索力调整、施工观测与控制及斜拉桥动力问题的研究。
16日上午11时18分,舟山连岛工程西堠门大桥第126段钢箱梁完成吊装、连接,至此,世界最长的钢箱梁悬索桥——西堠门大桥主桥宣告全线贯通。
西堠门大桥是连接舟山本岛与宁波的舟山连岛工程五座跨海大桥中技术要求最高的特大型跨海桥梁,主桥为两跨连续钢箱梁悬索桥,主跨1650米,是目前世界上最大跨度的钢箱梁悬索桥,全长在悬索桥中居世界第二、国内第一,但钢箱梁悬索长度为世界第一。
斜拉桥缆索检测机器人系统
工作原理
机器人移动方式
采用轮式或履带式移动方式,能够在 斜拉桥的缆索上灵活移动。
数据处理与分析
对采集的数据进行实时处理和分析, 识别和评估缆索的损伤状况,生成检 测报告。
检测方法
通过多种传感器和检测设备,如激光 测距、红外热成像、振动分析等,获 取缆索的几何尺寸、表面状态、应力 分布等信息。
系统组成
采用轻量化、高刚性的结构设计 ,确保机器人在斜拉桥复杂环境
下稳定运行。
驱动方式
采用轮式或足式驱动方式,根据实 际需求选择适合的驱动方式以提高 机器人的越障能力和环境适应性。
负载能力
合理分配机器人的负载能力,确保 能够携带足够的传感器和能源设备 完成检测任务。
传感器技术
传感器选择
根据检测需求选择合适的传感器 ,如激光雷达、高清摄像头、振 动传感器等,用于获取桥梁缆索 的几何尺寸、表面状态和振动特
实际效果与反馈
实际效果
机器人系统成功完成了斜拉桥缆索的全面检测,检测精度高 ,数据可靠;同时,大幅提高了检测效率,降低了人工成本 。
反馈
业主和施工方对机器人系统的性能和效果表示满意,认为该 系统为斜拉桥的安全监测提供了有力支持;同时,该案例的 成功经验也为后续类似项目的实施提供了有益的参考。
05
其他应用领域
01
该系统不仅适用于斜拉桥缆索的 检测,还可应用于其他大型结构 如大跨度桥梁、高层建筑、风电 设备等的检测。
02
该系统具备灵活性和可扩展性, 可根据不同结构的特性和检测需 求进行定制化开发。
与传统方法的比较
与传统的人工检测方法相比, 斜拉桥缆索检测机器人系统具 有更高的检测精度和效率。
技术难题
针对技术发展趋势中提到的关键 技术难题,开展深入研究,加强 技术创新和研发。
爬杆机器人
1 绪论1.1 背景“机器人学的进步和应用是本世纪自动控制最有说服力的成就,是当代最高意义的自动化”。
这是宋健院士对机器人在上个世纪所取得的成就的精辟概括。
同时机器人技术也是20世纪人类最伟大的发明之一,自60年代初问世以来,经历40余年的发展已取得长足的进步。
走向成熟的工业机器人,各种用途的特种机器人的实用化,昭示着机器人技术灿烂的明天。
所以我们必须走进它,了解它。
近年来,在我国大学,机器人作为机械电子学、计算机技术、人工智能等的典型载体被广泛地用来作为工科本科生的讲授课程之一;在中学,模型机器人则逐渐成为素质教育,技能实践的选题之一,各种机器人比赛正方兴未艾。
进入21世纪,人们也愈来愈亲身感受到机器人深入产业、深入生活、深入社会的坚实步伐。
这些都说明了机器人技术离我们越来越近了。
但大家是否可以给耳熟能详的机器人一个准确的定义呢?有人认为机器人无所不能,有人认为机器人必须像人。
那么,何为机器人?虽然很难给机器人下准确的定义,但是通常的理解就是:机器人是一种在计算机控制下的可编程的自动机器,根据所处的环境和作业的需要,它具有至少一项或多项拟人功能,如抓取功能或移动功能,或两者兼而有之,另外还可能程度不等地具有某些环境感知功能(如视觉、力觉、触觉、接近觉等)以及语音功能乃至逻辑思维、判断决策功能等,从而使它能在要求的环境中代替人进行作业。
如今进入二十一世纪,随着科技的迅速发展,现代化进程的日益加快,机器人的创新与研究越来越成为一个国家科技力量的具体体现,越来越多的机器人已成为各个领域重要的组成部分,因此机器人的发展也日益成熟,为人们的生活提供了更多的方便与快捷。
在世界经济快速发展的前提下,我国国民经济也有着飞速的增长,人民生活水平日益提高,伴随着城市和乡村矗立起无数的高层建筑和无数的高高的杆类,如电线杆、路灯杆等等。
这些杆类长年累月的暴露在空气中,很容易受到腐蚀和污染,不仅影响着城市的美观,而且缩短了它们的寿命,也大大提高的它的危险性,对人们造成诸多不便与危险。
超大跨径部分地锚交叉索斜拉桥交叉索网结构研究
超大跨径部分地锚交叉索斜拉桥交叉索网结构研究计算机的应用使得桥梁结构的计算能力大大提高,密索体系斜拉桥的建设随之成为可能,更多的拉索和更小的索距使得桥梁受力更加合理,也使斜拉桥的施工更加安全可靠。
随着计算机技术和有限元分析方法的不断发展,人们对复杂斜拉桥的静动力水平、结构稳定性以及非线性行为的分析更加便捷和准确。
从1956年至今短短50余年时间里,斜拉桥以其纤细优美的形态、超强的跨越能力成为了现代桥梁设计师的宠儿。
1975年,由于预应力技术的进步,法国的密索扇形斜拉桥圣.纳扎(St.Nazaire)桥(主跨404m)采用了预应力混凝土桥面和桥塔,成为了首座超越400m跨径的斜拉桥。
进入N20世纪90年代,斜拉桥的跨径更是呈现了跨越式的增长,斜拉桥跨径记录被多次刷新。
1994年,中国上海建成的杨浦大桥(主跨602m)将斜拉桥跨径拉大到了600m。
1995年,跨越法国塞纳河的诺曼底(Normandy)大桥跨径达到856m,成为20世纪跨径最大的混合斜拉桥。
1999年,在日本濑户内海建成的多多罗(Tataro)大桥主桥跨径达到890m,成为20世纪跨径最大的钢斜拉桥。
如此多座特大跨斜拉桥的出现说明斜拉桥的跨径水平已经来到了以往悬索桥牢牢占据的区域。
飞速发展后的斜拉桥在21世纪进入了建设的成熟期,设计理论和设计方法的完善引领着斜拉桥的跨径不断向着他的极限冲击。
苏通大桥(主跨l088m,于2008年建成)和昂船洲大桥(主跨1018m,于2009年建成)的建成标志着斜拉桥已然进入了千米级。
2012年,俄罗斯在远东符拉迪沃斯托克市修建的海参崴跨海大桥(RusskyIslandBridge)建成通车,其主跨达到1104m,成为世界最大跨径斜拉桥,如图1.1所示。
超大跨斜拉桥的建设已然成为21世纪桥梁工程的重点。
1018mt参1088m冷图1.1千米级斜拉桥的发展1.1.2对超大跨径斜拉桥的需求~新世纪里,随着科技的进步,人类征服地球的野心和愿望更加强烈。
斜拉桥悬索检测机器人课题通过验收
随着我 国社会 迅速发 展 ,大跨度桥梁 越来越 多 ,斜拉 桥、悬索桥 已经成为现 代大跨度桥梁 的广泛采 用 形式 。斜拉桥 建成后 ,其主要 受力构件之 一的悬 索长期暴露在 空气中,悬索表 面的聚乙烯 (E P )保护层 将 出现 不同程度 的硬化 老化等破坏现象 ,悬 索 内部钢 丝束 也因空气中的水分和其他 酸性物质 而受到腐蚀 , 严 重者甚 至出现 断丝现象 ,危及桥梁 的安全 。 目前 ,与桥 梁悬索检测相 配套的维护措 施还不 完善,悬索 的 检 测与维 修主要 由人工完成。 日前 ,由东南大学承担 的国家8 3 6 计划 先进制造技术领域 智能机 器人专题课题 “ 斜拉桥悬 索检 测机器 人 ”通 过 了专家验 收 ,斜 拉桥悬索检 测机器人 的成功研制 可为大 型斜拉桥 的悬索检测提 供相应 的维护技 术 。课题 组 以3 0 0 米高空 的斜 拉悬索为应用环境 ,研制 了双边轮式悬 索检测机器人 ,能克服 高空风载 的影 响 ,进入人所不及 的悬索高空环境 ,通过携带 的视频设备和无损检测装置 ,对悬索保护层 的表面状况和悬 索 内部钢丝状况进行无损检测 。机器人在 电路系统故障 时,还可 实现 自动 回收 ,运行安全可靠 。 目前 ,机 器人 已经在湖北军 山长江大桥 、湖北郧县汉江大桥 、安徽铜 陵长江大桥 以及世 界最大 的跨海大桥— —杭州 湾跨海大桥南航道斜拉桥等斜拉桥成功进行 了现场测试 。现场应 用表 明课题组 设计 的悬索检测机器人可 以 应用于大 型斜拉桥 的悬索检测 。
毕业设计(论文)爬杆机器人的机械结构设计
毕业设计(论文)--爬杆机器人的机械结构设计爬杆机器人的机械结构设计摘要论文在比较几类爬行机构的优劣的基础上,确定了机器人本体的大致结构。
在此基础上详细阐述了仿生爬行的原理和机器人模块化设计的理念。
根据路灯杆的尺寸数据,设计机器人的三维模型。
机器人建模的过程功能的实现与机械结构的尺寸优化包括以下几个关键点:爬杆机器人设计中的功能机构的协调配合、攀爬手臂夹持重合度的选择、攀爬力的变化与结构参数之间的关系、攀爬力零点的渡过等难点的设计方法和设计准则,为此类爬行机器人的设计提供参考。
关键词:爬杆机器人变直径杆仿生学Mechanical Structure design of Pole-Climbing-RobotAbstractIn the paper,the wormlike imitated pole-climbing robot what the author designed and manufactured is non-intelligence mechanical crawler. Based on compared the merits and demerits of several kind of crawling mechanism,confirmed the general structure of robot body. Based on above-mentioned,expatiated the principle of bionic crawling and the theory of modular designing on robot in detail. Based on the dimension data of poles,we have designed and manufactured the model of robot. The design methods and design guidelines during the course of robot modelingachieve the movement and optimum structural design following several key points: Functional coordination between agencies,choice of climbing arm gripping coincidence,changes of climbing force the relationship between the structural parameters,choice of zero point of climbing force and its transition in pole-climbing robot designing. Provides references forth kind of crawling robot’s designing.Key Words : pole-climbing robot,variable-diameter pole,bionics 目录1 绪论 11.1 论文研究的目的和意义 11.2 国内外研究现状及存在的主要问题 2机器人的分类 3研究现状 4目前存在的主要问题81.3 研究主要内容和研究对象91.4 本章小结92 爬杆机器人仿生的设计理论研究102.1 仿生机器人概述102.2 总体方案分析112.3 蠕动式仿生爬行方案研究142.4 本章小结153 机器人爬行部分的结构方案163.1 爬行机器人本体结构设计准则16 模块化设计基础理论163.2 机器人结构原理方案分析18夹紧机构方案研究18传动机构方案分析20动力系统方案研究23机器人结构原理及爬行动作原理 243.3 变直径杆爬行问题的解决263.4 安全稳定的工作保障 27夹紧力的保证―弹簧的设计方法研究27 3.4 机器人的结构设计27电机的选型及参数选择 28机器人本体的空间结构设计30抓紧机构尺寸参数的确定33传动机构尺寸参数的确定37上、下凸轮的配合研究413.5 弹簧的设计与校核423.6 本章小结45结语46致谢47参考文献481 绪论1.1 论文研究的目的和意义目前全国日益加快的现代化建设步伐,除了2008年8月在北京举办的奥运会、还有2010年在上海举办的世博会,随着我国国民经济的飞速增长、人民生活水平日益提高,城镇中随之矗立起无数的高层城市建筑,各类集实用性与美观性一体的市政、商业工程诸如电线杆、路灯杆、大桥斜拉钢索、广告牌立柱等如图1.1 ,它们通常5-30m,有的甚至高达百米,壁面多采用油漆、电镀、玻璃钢结构等,由于常年裸露在大气之中,风沙长年累月的积累会形成灰尘层,该污染影响城市的美观,同时空气中混合的酸性物质也会对这些城市建筑特别是金属杆件造成损坏,加快它们的生锈,并缩短它们的使用寿命,需要定期进行壁面维护工作。
斜拉桥构造解析
主 跨(m) 380 360
348+348 330 320 318 312
建成年 1999 在建
2000
设计单位 广东省公路勘测设计院 广州市政设计院 湖北省交通规划设计院 四川省公路规划设计院 交通部公路规划设计院 江西省交通规划设计院 铁道部大桥局设计院
8 岳阳洞庭湖大桥(三塔) 310+310
The longest spans — Beam Bridges
斜拉桥在我国的发展
学习阶段:
60年代初传入我国; 1975年四川、上海先后建成试验性钢筋混凝土斜拉桥
( 75.8m云阳汤溪河桥, 54m新五桥);
1977年改革开放;1982年建成220m济南黄河大桥(已全面换索)
推广阶段(80年代,30余座斜拉桥)
1860 First Steel Bridge Built
In Vienna 1810 Iron Wire First Produced
1779 Iron Bridge
Built
1960 Carbo and Aramd Fibres First Produced
Higher Strength
Steel
1、定义: 由梁、索、塔三类构件组成的一种桥面体系以加劲梁受压(密索)或受 弯(稀索)为主,支承体系以斜拉索受拉及桥塔受压为主的桥梁。
2、斜拉桥的组成与特点 (1)组成:索塔、拉索、主梁、桥墩、基础 (2)特点:与吊桥相比 ➢它是一种自锚体系,不需昂贵的地锚基础 ➢防腐技术要求较低,还可在通车情况下换索 ➢刚度较大,抗风能力较好 ➢用钢量较少 ➢采用悬臂施工不防碍通航
第一章 绪论 INTRUDOCTION
第一节 斜拉桥的发展 1、斜拉桥的定义 2、斜拉桥的组成与特点 3、斜拉桥的发展历史 4、斜拉桥的发展方向
cable-stayed bridge

Cable-stayed bridges(斜拉桥)Cable-stayed bridges are constructed along a structural system which comprises an orthotropic deck and continuous girders which are supported by stays, i.e. inclined cables passing over or attached to towers located at the main piers. Fig.20.1 is the typical photo of a cable-stayed bridge.斜拉桥是按照如下结构体系建造的一种桥梁,该结构体系包括正交异性桥面板板和由通过位于主墩上的索塔顶部或固定于索塔顶部的倾斜缆索支承的连续梁。
图20.1是典型的斜拉桥。
The use of inclined stays as a tension support to the bridge deck was well-known in the nineteenth century and there are many examples, particularly using the inclined stay as added stiffness to the primary draped cables of the suspension bridge. Unfortunately, the concept was not well understood. As it was not possible to tension the stays they would become slack under various load conditions. The structures often had inadequate resistance to wind-induced oscillations. There were several notable collapses of such bridges, for example the bridge over the Tweed River atDryburgh(1832), built in 1817, collapsed in 1818 during a gale only six months after construction was completed. As a result the use of the stay concept was abandoned in England.使用倾斜撑杆作为桥面板的张力支撑在十九世纪是众所周知的,并且存在许多示例,特别是使用倾斜撑杆作为悬索桥的主要悬垂缆索的附加刚度。
面向结构健康监测的智能机器人系统的应用与发展趋势
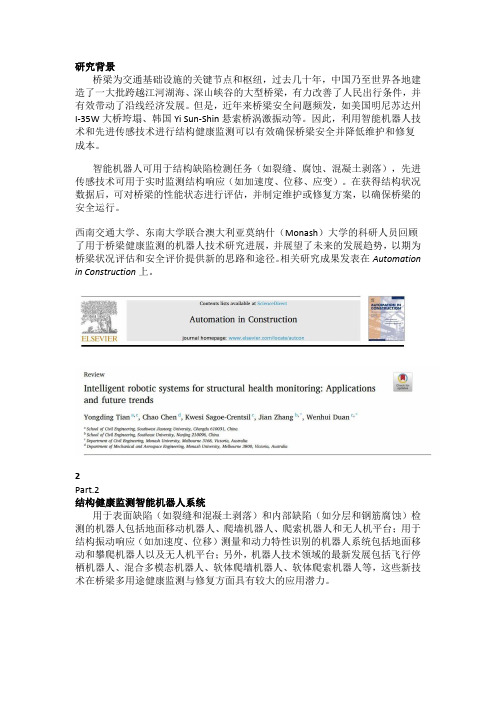
研究背景桥梁为交通基础设施的关键节点和枢纽,过去几十年,中国乃至世界各地建造了一大批跨越江河湖海、深山峡谷的大型桥梁,有力改善了人民出行条件,并有效带动了沿线经济发展。
但是,近年来桥梁安全问题频发,如美国明尼苏达州I-35W大桥垮塌、韩国Yi Sun-Shin悬索桥涡激振动等。
因此,利用智能机器人技术和先进传感技术进行结构健康监测可以有效确保桥梁安全并降低维护和修复成本。
智能机器人可用于结构缺陷检测任务(如裂缝、腐蚀、混凝土剥落),先进传感技术可用于实时监测结构响应(如加速度、位移、应变)。
在获得结构状况数据后,可对桥梁的性能状态进行评估,并制定维护或修复方案,以确保桥梁的安全运行。
西南交通大学、东南大学联合澳大利亚莫纳什(Monash)大学的科研人员回顾了用于桥梁健康监测的机器人技术研究进展,并展望了未来的发展趋势,以期为桥梁状况评估和安全评价提供新的思路和途径。
相关研究成果发表在Automation in Construction上。
2Part.2结构健康监测智能机器人系统用于表面缺陷(如裂缝和混凝土剥落)和内部缺陷(如分层和钢筋腐蚀)检测的机器人包括地面移动机器人、爬墙机器人、爬索机器人和无人机平台;用于结构振动响应(如加速度、位移)测量和动力特性识别的机器人系统包括地面移动和攀爬机器人以及无人机平台;另外,机器人技术领域的最新发展包括飞行停栖机器人、混合多模态机器人、软体爬墙机器人、软体爬索机器人等,这些新技术在桥梁多用途健康监测与修复方面具有较大的应用潜力。
图1 结构健康监测中的各类型智能机器人3Part.3结构缺陷检测机器人01地面移动机器人随着机器人技术和人工智能的快速发展,各种用于桥梁缺陷检测的移动机器人平台应运而生。
桥面裂缝/缺陷检测是一项重要的检测任务,然而,传统方法具有一定的主观性、检测过程费时费力。
为此,国内外学者开发了多种集成于移动车辆平台上的缺陷检测系统,如美国RABIT新型机器人系统,该系统集成了多种无损检测工具,如冲击回波(IE)、电阻率(ER)、探地雷达(GPR)和超声波表面波检测,能够对桥面板的各种缺陷进行检测,但该系统无法直接用于桥梁底部缺陷的检测。
缆索机器人-爬行机构及其驱动装置设计
毕业设计说明书缆索检测机器人爬行机构及其驱动装置设计摘要缆索检测机器人是特种机器人技术在斜拉桥缆索检测方面的应用。
自从1956年在瑞典建成世界上第一座斜拉桥以来,斜拉桥就越来越受到世人的青睐。
斜拉桥成为现代建筑的一道亮丽的风景。
然而,针对目前斜拉桥的人工吊篮检测的落后方式,如何高效快速的进行斜拉桥的缆索的检测和维护成为人们急需解决的一个重要问题。
我们课题组这次所设计的缆索表面机器人分为三部分:检测部分、动力部分和携带部分。
这样的设计的最大优点就是质量轻,便于安装等。
在设计的过程中,我们要考虑多个问题,最重要的就是小车轮子的自动调节和CCD支撑架的手动调节。
对于小车我采用的是弹簧和螺栓双重调节,对于CCD支撑,我所采用的是滑杆调节。
关键词:斜拉桥缆索,携带机构,缆索检测ABSTRACTThe cable robot developed in this paper is the first application of special robots to cables of cable-stayed bridges. Cable-stayed bridge which is more and more popular in the world, since the first cable-stayed bridge was built in Sweden in 1956. The cable-stayed bridge has become one of the most beautiful scenes. Then, concerning the artificial maintenance method for cables, how efficient the cable stayed for the rapid detection and the maintenance of the urgent need to resolve to become an important issue.We designed this discussion group on the cable robot is divided into three parts: detection of power and carrying some parts. This design is the biggest advantages of lightweight, easy to install, and so on. In the design process, we have to consider a number of questions, the most important thing is the wheels of the car and automatically adjust the CCD MOUNTINGmanual adjustments. I use the car for the spring and bolt is a double-conditioning, the CCD support, I have adopted the regulation is the slider.Keywords:cable-stayed bridge cable, carrying bodies, Cable Detection目录一.斜拉桥的发展 (6)二.缆索可靠性问题 (8)三.缆索的腐蚀及防护方法 (10)四.绪论 (16)五.缆索机器人的设计意义 (20)六.缆索机器人总体设计方案 (21)6.1 机械结构的设计 (23)6.2 机械结构的说明 (25)七、机构的力学分析 (27)八、缆索机器人辊轮轴设计 (35)九、轴承校核 (43)十、键的校核 (45)十一、控制流程 (46)十二、安全性的考虑 (47)十三、结论 (49)致谢 (50)参考文献 (51)一、斜拉桥的发展斜拉桥(cable-stayed bridge)是一种美观的桥梁形式。
悬索桥爬杆机器人整理资料
斜拉桥缆索的形状主要有圆柱形、平行六棱柱和螺旋六棱柱行,但以圆柱形居多,缆索直径有多种规格,一般在60mm-200mm之间,外层有聚乙烯作为防护套,标高高、距离长,倾斜度一般在30°-90°之间。
现有爬升方式有直线连续爬升、夹紧蠕动爬升、螺旋攀援爬升和吸附爬升等自动方式。
爬杆机器人主要有电动机械式、电动液压式、气动蠕动式。
欲使机器人在壁面上自由地移动,必须具备两种功能:贴附功能与移动功能。
贴附方式有吸附式和夹持式2种,运动方式有轮式、履带式、腿式及蠕动式4种。
吸附式是通过面接触方式紧贴于壁面上,夹持式是靠点夹紧在杆上。
吸附方式又有真空吸附和电磁吸附之分,其中真空吸附式用得比较多,因为它对壁面的要求不十分严格;电磁吸附承载能力大,有很强的适应能力,但其应用范围窄,需要杆件壁面含有电磁场可吸附的含铁、钴、镶等材料。
电动机械式爬行器是由电动机带动链轮、带轮、齿轮驱动夹紧杆体的前后轮向同一方向转动,依靠行走轮与杆体的摩擦力使爬升器沿杆体上升下降。
螺旋运动爬升机器人的爬行动作是由轮子的安装位置决定的,轮子滚动方向与水平面成一定角度,这样轮子转动时它在杆体上形成的是螺旋轨迹,沿此轨迹通过电动机的正反转该机构便可实现上升和下降运动。
电动机械式爬杆机器人和螺旋线运动爬杆机器人都是以电动机带动滚轮匝紧杆体,依靠此摩擦力带动整个机器人沿杆体上升和下降。
如果工作阻力和重力大于摩擦力就不能安全运作,且机器人总体机构较复杂。
(可实现变直径)气动蠕行式爬杆机器人用气缸驱动机构实现交替夹紧和移动,其向上爬行时气缸动作一个周期的过程为下部汽缸夹紧,上部汽缸松开,提升汽缸活塞杆伸出,上部上升;上部汽缸夹紧,下部汽缸松开,提升气缸体上升,下部上升。
如此反复,机器人就可以连续爬行。
对于气动蠕行式爬杆机器人,其上升和下降运动鲶实现由气压控制,需要气源和气动控铡系统,医此其设备成本较高。
机器人技术的发展与未来展望
机器人技术的发展与未来展望随着科技的不断发展,机器人技术也逐渐成为人们关注的焦点。
今天,我们已经进入了一个人工智能(AI)的时代,面对一系列前所未有的技术挑战,一些专业的行业人士也在不断地探索着机器人技术的未来。
在这篇文章中,我们将一起来探讨一下机器人技术的发展与未来展望。
一、机器人技术的发展历程机器人技术的历史可以追溯到20世纪初期,当时的机器人技术还是比较简陋的,很多机器人都是由管道、线缆和蓄水池等机械组成的。
到了1960年代,IBM公司推出了一款可以较为自动地执行任务的机器人,这标志着机器人技术的全面起步。
1970年代,国际上机器人技术开始发展得非常迅速,共有11家国家开始研制机器人,这也拉开了机器人技术的发展序幕。
随着科技的不断迭代,机器人技术也取得了巨大的进展。
最初的机器人仅能完成一些单一的、重复的任务,如装配、搬运、焊接等。
但随着计算机技术的发展和机器人技术的智能化,机器人已经可以执行更加复杂、更具智能的任务。
目前,机器人技术不仅已经广泛应用在工业、医疗等领域,也逐渐涉及到了农业、服务业等领域。
二、机器人技术的应用领域机器人技术在很多领域都有丰富的应用,下面我们将从几个角度来带大家了解一下。
(一)工业领域机器人技术在工业领域的应用非常广泛,例如在汽车制造、电子制造、化工制造等多个领域都有应用。
自动化的生产线已经成为工业化生产的典型模式之一,这也为机器人技术的应用创造了良好的环境。
通过机器人的自动化操作,不仅可以提高生产效率,同时也避免了一些重复操作对生产人员的身心健康造成的损害。
(二)医疗领域近年来,机器人技术在医疗领域的应用也越来越广泛。
例如,人口老龄化的背景下,机器人手术已经成为了当今医疗领域的一大亮点。
相对传统的手术方式,机器人手术能够大大提高手术的准确性和安全性,也能减少手术对病人身体的损害。
此外,机器人还可以通过音、像、感等多种手段与医护人员实现“双向交互”,辅助医护人员完成更多的任务。
斜拉桥缆索检测机器人系统研究
斜拉桥缆索检测机器人系统研究文章介绍了斜拉桥缆索檢测机器人的结构组成。
斜拉桥缆索是斜拉桥至关重要的组成部分,其寿命决定了整个桥梁的使用寿命。
因此迫切需要定期对斜拉桥的拉索进行检测和维护。
而机器人检测法是进行斜拉桥检测的众多方法中最便捷、高效、经济的。
文章介绍的斜拉索机器人由机械结构、驱动部分、数据采集部分组成,将机械、电气、传感器融合在一起组成了一套全新的机电设备。
该设备具有操作简便、结构简单、故障率低、运行效率高等优点。
从而为斜拉桥缆索检测提供了一套完整可行的方法。
标签:斜拉桥缆索;机电一体;多传感器融合引言斜拉桥由于其采用拉索来代替梁式桥的支墩,因此其成为了大跨度桥梁的主要桥型。
斜拉桥主要由索塔、主梁、斜拉索组成。
拉索作为斜拉桥的主要承重构件,是斜拉桥的”生命线”,造价占整座桥梁的30%左右[1]。
定期针对拉索进行检测及维护工作对延长其服役寿命具有重要的意义。
斜拉索是一种架设在高空的特殊杆状构件,内部钢丝束是拉索主要受力部分,钢丝束外层沿拉索长度方向连续缠绕右旋的细钢丝,或使用纤维增强聚氨酯带替代细钢丝缠绕,最外层使用黑色或彩色的高密度聚乙烯护套。
索缆断面结构呈正六边形或缺角六边形紧密排列[2]。
注:1-高强度钢丝绳;2-缠绕细钢丝或纤维增强聚氨酯带;3-聚乙烯保护套;4-最外层聚乙烯保护套斜拉桥索缆长期处于露天服役状态,经历风吹雨淋日晒,其聚乙烯护套会产生不同程度的硬化和开裂现象,导致保护套内的钢丝束产生腐蚀。
另外,拉索的无规则振动也会引起钢丝磨损。
上述情况都会减低索缆的使用寿命,从而在斜拉桥使用过程中产生严重的隐患。
国内外已发生过多起斜拉桥断缆或是因索缆严重腐蚀而导致斜拉桥整体换索的不幸事件[3]。
例如委内瑞拉的Maracibo桥,英国的Wye桥,中国的广州海印桥,四川宜宾南门大桥,济南黄河大桥等。
因此,为减少斜拉桥拉索高昂的维护费用同时延长索缆的使用寿命,对在役拉索进行定期的检测和维护显得尤为重要。
大倾斜度缆索机器人的研制_张家梁
大倾斜度缆索机器人的研制①张家梁② 吕恬生 罗 均(上海交通大学机器人研究所 上海200030)摘 要 针对现代斜拉桥对安全和美观的越来越高要求,提出用大倾斜度缆索机器人进行高空缆索检测和维护的新方法。
采用电驱动摩擦轮压紧使机器人沿缆索连续爬升或气驱动气缸夹紧蠕动爬升,利用随带的喷涂、磁检测等装置,实现了在役缆索的涂装、内部检测等作业,已在上海徐浦大桥上成功进行了现场试验,取得满意的效果。
关键词 机器人,斜拉索,涂装,磁检测0 引言缆索是斜拉桥的主要承重部分,其造价约占全桥造价的25%~30%,为了降低缆索的维修费用,避免单根或全体缆索被腐蚀而换索,改善大桥形象,定期的内外部检测、涂装或修复都是必须的。
至今对斜拉索的检查和维护方式还较落后,在风吹雨淋日晒的桥面高空,一般仍需施工人员亲手作业。
德国约于1970年开始将能够同时检查局部缺陷和测量金属横截面面积缩小的电磁设备用于检查桥梁的缆索[1],利用卷扬机使设备沿缆索移动,记录测试数据或储存以作分析;我国近年也考虑了斜拉索的断丝、锈斑检测,利用卷扬机拖动小车搭载钢丝检测传感器[2],但仅能检测较短的缆索。
上海徐浦大桥建成后采用了人工涂装的方式,即由塔顶设立定滑轮吊点,用卷扬机经钢丝绳带动小车及载人和涂料的吊篮由人在高空对全部缆索实行了涂装,不仅效率低,而且安全性差,成本高。
因此,利用特种机器人技术,开发一种自动沿索爬升并能完成一定作业任务的大倾斜度缆索机器人,不仅给斜拉桥缆索的检测和维护作业提供重要的手段,而且也可应用于类似的斜拉结构上,必然会带来巨大的经济效益和社会效益。
1 爬升机构1.1 理论分析斜拉索有圆柱形、平行六棱柱形和螺旋六棱柱形等多类型式,缆径有多种规格,距离长,高度大,倾斜度大(至近90℃)。
尽管在缆索两端施加了较大的拉力,但由于自重作用,使缆索形成一条悬链线[3]。
可得缆索在垂直面的解析式为二次函数: y=(qx2+(2H sinα-ql)x)/2H cosα)(1)其中,y为至缆索下端锚固点的垂距,x为至下端锚固点的平距,q为单位索长重量,l为索长L的水平投影,H为作用在缆索上轴向拉力T的水平分力,α为缆索两端点连线的倾角。
缆索机器人

连续移动式缆索检测维护机器人的设计简要说明:1、目录要写2、报告最少要写满15页3、注意文中红体字4、周五上午要PPT演讲并上交报告5、还有其他不明白的欢迎拨打咨询热线:501409附件的内容写:组长:王珊珊主要设计:王珊珊、陈晨英文翻译:葛明超、钱旭斌PPT 演讲:胡雷、茹立科资料收集:刘益舟、胡斌一、背景斜拉桥以其观赏性好、承载能力强、跨越能力大、抗风稳定性高、工程造价经济等优点,成为公路、铁路及城镇道路建设中大跨径桥梁常用桥型之一,在世界范围内得到了广泛的应用。
作为斜拉桥的主要受力部件缆索因暴露在空气中,长期受到风吹、日晒、雨淋及大气中污染物的侵蚀,其表面的聚乙烯保护套会出现隆起、破裂等现象,甚至保护套内的钢丝束会出现生锈、断丝等问题,严重影响了斜拉桥的观赏性并且给斜拉桥的安全埋下隐患。
目前,缆索维护作业基本使用人工吊篮方式,成本高、效率低、安全性差。
因此,研制缆索自动化检测机器人对缆索有效维护是十分必要的。
针对潜在的缆索维护市场, 国内外多家机构参与了缆索维护机器人研究开发。
现有爬缆机构的运动方式主要有摩擦轮连续滚动式, 夹紧蠕动式两种。
连续滚动式机构由于缆索的悬垂曲线、缆索风振动等外界因素影响, 摩擦轮的预紧力较难精确调整; 过大, 因摩擦消耗功率就越多; 过小,随机的外部干扰会使夹紧力不足, 爬升失效, 多数情况下为了提高可靠性只能牺牲能耗比。
夹紧蠕动式机构对于截面尺寸有突变、表面情况恶劣的缆索具有较好的适应能力,但爬升和夹紧运动分别由2 套机构实现,运动较复杂, 浪费了过多因夹紧所耗的时间和能源。
二、基本要求本文采用的是电机驱动摩擦轮连续滚动式,这种爬升方式具有快速、平稳、连续性好等优点被越来越多地应用在缆索检测机构中。
针对连续移动并且能够越过障碍的缆索检测机器人,有以下几点要求:( 1) 缆索长度不一,最长的缆索的长度接近600m,这就要求缆索机器人有较快的爬行速度,并且能通过缆索表面的隆起、空洞及缆索连接处的关节等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Research articleDevelopment of cable maintenance robotfor cable-stayed bridgesJun Luo,Shaorong Xie and Zhenbang GongCollege of Mechatronics Engineering and Automation,Shanghai University,Shanghai,People’s Republic of China,andTiansheng LuCollege of Mechanical Engineering,Shanghai Jiaotong University,Shanghai,People’s Republic of ChinaAbstractPurpose–In order to replace the conventional human maintenance of cable-stayed bridges,a robot is designed and constructed for tasks such as cleaning,painting and rust-detecting.Design/methodology/approach–Adopting a modular approach,two kinds of climbing mechanisms,plus a painting mechanism and a rust-detecting method are designed.Findings–A robot that can climb and maintain the cables of cable-stayed bridges has been designed and constructed.It has been proved by experiment that the robot can overcome many disadvantages of conventional human bridge-maintenance,and drastically improve efficiency,cost,and safety.Research limitations/implications–The robot is of industrial size,but a new mechanism requiring less installing time will be designed for the future. Practical implications–The robot has been applied to cables of the Nanpu Bridge and Xupu Bridge in Shanghai.More than80cable-stayed bridges and six suspension bridges have been built or are being constructed across large rivers in China alone.This gives an enormous potential market. Originality/value–The cable maintenance robot developed in this paper is the world’sfirst special robot for the cables of cable-stayed bridges.Keywords Robotics,Cable bridges,ChinaPaper type Research paperIntroductionCable-stayed bridges are developing rapidly because of their anti-seismic characteristics,low cost and elegant appearance. Since,the construction of Shanghai’s Nanpu Bridge in1987 with a main span of423m,China has begun a new wave of constructing long-span cable-stayed bridges.Currently,more than80cable-stayed bridges and six suspension bridges have been built or are being constructed over the country’s large rivers.According to incomplete statistics,400cable-stayed bridges have been built in the world from the Stromsunel Bridge to the Xupu Bridge(Lin,1994).These cable-stayed bridges play an important role in economic development and city enhancement.With the development of these cable-stayed bridges,many challenging technical problems have emerged concerning design,construction and maintenance.Cables are the main supporting components of cable-stayed bridges,and since they are exposed over a long period to air,wind,rain and sunshine,the polyethylene sleeves on the cable surface harden and crack to different extents.This can cause serious problems such as rust spots and breaking of the steel wires within the sleeve.Therefore, regular cleaning and painting of the cables is necessary not just for enhancing the bridge with colourful cables,but also for its protection.Some countries began to clean and paint the cables of cable-stayed bridges using manual methods,for example on the Golden Bridge,USA and the Xupu Bridge in China.So far two methods have been adopted:hydraulic lifts for small cable-stayed bridges,or hanging brackets for the workers,tools,paint and so on,dragged with steel wire by a fixed pulley installed on the top of the bridge,as shown in Figure1.The latter method has low efficiency,high cost,and is less safe.T o address these problems,it is important to develop a cable maintenance robot(CMR)to clean,protect and improve the appearance of the cables with higher efficiency,lower cost and better safety.At present,there is no report of a CMR being applied to a cable-stayed bridge,but there are reports of some special robots which are similar in concept.Fukuda designed a series of external-pipeline diagnostic robots,Mark I-IV,consisting of three linked modules.These robots are capable of straightThe current issue and full text archive of this journal is available at /0143-991X.htmIndustrial Robot:An International Journal34/4(2007)303–309q Emerald Group Publishing Limited[ISSN0143-991X] [DOI10.1108/01439910710749627]This project is supported by National Natural Science Foundation of China(No.5040504660605028),Program for Excellent Y oung T eachers of Shanghai(04Y0HB094)State Leading Academic Discipline Fund (Y0102)and Shanghai Leading Academic Discipline(BB67).and spiral movements along the outside of a pipeline,and freely pass over obstacles such asflanges and T-joints,and they can move along vertical pipelines(Fukuda and Hosokai, 1992a,b).Higuchi and Maeda(1991)developed a mobile inspection robot for power transmission lines.This is equipped with four crawlers,two arms with pulleys,and four actuators that run on the earth wire stretched over the top of the pylons.However,this robot cannot climb power transmission lines with a large gradient.Almonacid et al. (2003),proposed a novel application of the Stewart-Gough parallel platform as a climbing robot that can climb through long structures describing unknown spatial trajectories,such as palm trunks and tubes.T avakoli et al.(2005)designed a hybrid four-degree-of-freedom mechanism and a unique gripper for pole-climbing robots.These devices are able to climb through spatial trajectories such as cylinders,tubes and so on,but it is difficult for these robots to climb the spiral hexed-prism shaped cables of cable-stayed bridges.Therefore, new mechanisms have been designed for a series of cable maintenance missions including cleaning,painting and rust-detecting.ModularizationBefore designing the new CMR system,the authors decided on a modular approach:the CMR is designed separately in two modules,a climbing module and maintenance module, linked by a standard mechanical interface.This method has high efficiency and low cost in terms of design and assembly. Using the same climbing mechanism,we can interchange different maintenance modules with different functions of cleaning,painting and inspecting cables.Climbing mechanismAfter studying the various mechanisms for climbing external pipelines,tree trunks,power transmission lines and so on,we designed a new climbing mechanism,called the electric climbing mechanism(shown in Figure2)which can climb arbitrary-gradient cables with diameters ranging from80to 200mm,and also climbs someflexible cables.In order to climb cables with a steep gradient,the climbing mechanism must minimise wind resistance,friction drag and other resistances,and maximise the climbing force.However,the sectional shape of most cables in cable-stayed bridges is spiral hexed-prism,so the climbing mechanism tends to rotate the cable along its axis because of the deflection produced by gravity and the force between the wheels and the cable.The maintenance mechanism must work in a stable way,so we designed a rotary device consisting of inner and outer frames. The inner frame connects to the climbing mechanism,and the outer frame to maintenance mechanism.Vertical and horizontal smooth-rolling bearings are set between the inner frame and the outer frame.This produces a climbing mechanism with an inner frame that moves spirally along the cable,and a maintenance mechanism mounted on the outer frame by a standard interface,that remains stable because of the hanging weight of a painting bucket or storage battery,etc.The umbilical cable linking to the inner frame needs to rotate around the cable,so a brush is used to facilitate this.T o cope with cables of different diameters,we designed two grades of clamping mechanism,a rough-tuning one for adapting to cables with a large diameter difference, and afine-tuning mechanism for adapting to cables with a small diameter difference.T o reduce the influence of wind-induced vibration,the CMR has a cylindrical structure, shown in Figure3.In order to install the climbing mechanism on cables with different gradients,an installing vehicle was designed,as shown in Figure4.In addition,the climbing mechanism has a safety device to allow the CMR to slip slowly from the high-altitude cable to the bridgefloor if there is a power failure or other unexpected condition.The technical specification of the electrical climbing mechanism with all-driven wheels is as follows:Dry weight:190kgPay load:180kgPower:3£0.4kWVelocity:0.5,8m/minSize:f1,100£1,000mmWe developed another climbing mechanism for rust-detection in cables,and this is shown in Figure5.This mechanism, called the pneumatic climbing mechanism,has14cylinders and is divided into an upper part and a lower part.Each part includes three clamping cylinders and three steerable cylinders.In addition to the12cylinders,there are two elevating cylinders allowing the mechanism to climb along the cable.As the lower part of the mechanism clamps the cable Figure2Figure1with its three clamping cylinders,the upper part of the mechanism moves upwards a certain distance along the cable using the two elevating cylinders.Then when the upper part of the mechanism is clamping the cable with its three clamping cylinders,the lower part of the mechanism moves upwards a certain distance along the cable by means of its two elevating cylinders.Continually repeating this movement like a worm,the mechanism travels a long distance along the cable.The extended state of the pneumatic robot is shown in Figure 6.The technical specification for the pneumatic worming climbing mechanism is as follows:Dry weight:160kg Pay load:140kgElevating cylinder:80£1,000mm Clamping cylinder:100£35mmFigure5Figure3Figure4Steerable cylinder:80£35mmVelocity:0.5,5m/minSize:600£600£1,280mmPainting mechanismPainting a cable requires fully painting its cambered surface with a uniform coat.So it is quite difficult to design a circular painting technique for the cable at high altitude.Figure7 shows a structural diagram of the painting mechanism of the CMR.On the left of the right-hand picture of the painting mechanism is the standard interface that links it to the climbing mechanism,and on the right is the painting mechanism.A hybrid four-bar linkage rocks the painting guns back and forth.The painting motor turns the crank,and the linkage makes the internal groove rock back and forth at an angle of708to external groove.The internal and external grooves are linked by vertical and horizontal bearings similar to those between the inner and outer frames of the climbing mechanism.The external groove links to the external frame of the climbing mechanism,and three spray guns arefixed symmetrically on the internal groove to paint the cambered surface of the cables.The wind-proof cover of the painting mechanism protects it from high-altitude winds.The CMR must apply a continuous coating to the cable, with no unpainted areas between the guns.So we now calculate the continuity requirement.Given that the distance between the nozzle of the spray gun and the surface of the cable is h,and the scatter angle is b,and that the rocking of the paint gun and robot’s climbing are driven by different motors,then the condition for continuity of painting is as follows:n1n2,4hitgðb=2Þp dð1Þwhere n1is the rotational speed of the climbing motor,i is the reduction ratio of the climbing mechanism,d is the wheel diameter of the climbing mechanism,n2is the rotational speed of the painting motor.Therefore,we must ensure that the rotational speeds of the climbing motor and the painting motor satisfy equation(1),to guarantee continuity of painting.A prototype painting mechanism is shown in Figure8.Examining internal wiresRust can cause wires to break within the cable,so it is important to detect rusting of the internal wires.A broken internal wire causes non-uniform tensile behaviour and changes in cross section.We have adopted a magnetic leakagefield method for testing internal wires non-destructively.The working principle is shown in Figure9.T o detect the leakagefield from defects,the wire is thoroughly magnetized in the axial direction to produce a constant residual magneticfield.Because of its change in permeability,the defective wire has a characteristic leakagefield,allowing the relevant information to be obtained from a distribution analysis of the leakagefield.The following is a brief analysis of the nature of the leakagefield of defective wires.Wire defects can be classified into two types:one is LF(localized faults)resulting from damage such as wire breakage,wire crack,and spot corrosion.The other is LMA(loss of metallic cross section) from wire drawing and wearing,etc.When a wire is thoroughly magnetized,the distribution of leakagefield,orflux density,is changed at the point of defect,no matter which type of fault is present.The leakagefield at a defect is not evenly distributed, but has a variable spatial vector.Hall elements test forflaws in wires inside the cable by detecting the change influx density. Figure9shows a new sensor for examining the internal wires of cables.This sensor includes Hall elements,a permanent magnet,and magnetic concentrating equipment,and detects LF and LMA faults.We used this sensor to examine two cable samples which simulate a broken wire and partial wearing of cables, respectively,shown in Figure10.The leakagefield of LF defects is shown in Figure11(a,b,c of curve1)and the leakagefield of LMA defects is shown in Figure10(e of curve2).Point d of curve2is random interference.ApplicationThe CMR can be applied to painting and rust-detecting on the cables of cable-stay bridges.Both were tested on the Xupu Bridge and the Nanpu Bridge in Shanghai.The installation position of the electric robot used for painting is shown in Figure12,while the position of the contracting/extending pneumatic robot is shown in Figure13.The electrical robot with all-driven wheels and the pneumatic worming robot developed in this paper can operate simultaneously on different cables of the same cable-stayed bridge.Figure6The painting and inspecting performances of the cable robot are much better than from manual work,with a higher quality,higher efficiency,lower cost and better safety.ConclusionAddressing the very difficult problem of detecting and painting the cables of cable-stayed bridges,this paper describes the design of two climbing mechanisms.One is an electrical climbing mechanism with all-driven wheels,and the other is a pneumatic worming climbing mechanism.In addition,a painting mechanism and a rust-detectingmechanism are designed.The CMR developed in this paper is the first special robot for the cables of cable-stayed bridges.The cable-stayed bridge has been of intense popular interest in modern middle-span bridge construction for 20years.The cost of manual maintenance per bridge per year amounts to millions of dollars.Besides,painting the cables of cable-stayed bridges,CMRs can also paint pipelines at high altitude.Therefore,CMRs have a large potential market and will create economic and social benefits.Figure8Figure9Figure12Figure13Figure11ReferencesAlmonacid,M.,Saltare´n,R.J.,Aracil,R.and Reinoso,O. (2003),“Motion planning of a climbing parallel robot”, IEEE Transactions On Robotics And Automation,Vol.19 No.3,pp.485-9.Fukuda,T.and Hosokai,H.(1992a),“A study on an autonomous pipeline maintenance robot(3rd Report, Structure and Control Mark III and Obstacle Sensing)”, JSME International Journal,Series C,Vol.53No.492, pp.1788-94.Fukuda,T.and Hosokai,H.(1992b),“A study on an autonomous pipeline maintenance robot(4th Report,Joint Control and its Trajectory Generation for Mark II)”,JSME International Journal,Series C,Vol.53No.495,pp.2325-30. Higuchi,M.and Maeda,Y.(1991),“Development of a mobile inspection robot for power transmission lines”, JRSJ,Vol.9No.4,pp.457-63.Lin,Y.(1994),Cable-Stayed Bridge,People’s Jiao T ong Press, Beijing.Tavakoli,M.,Zakerzadeh,M.R.,Vossoughi,G.R.and Bagheri,S.(2005),“A hybrid pole climbing and manipulating robot with minimum DOFs for constructionand service applications”,Industrial Robot,Vol.32No.2, pp.171-8.Further readingHosokai,H.and Fukuda,T.(1992),“A study on an autonomous pipeline diagnostic robot(2nd report,control method of manoeuvrability of robot mark II)”,JSME International Journal,Series C,Vol.53No.586,pp.399-405. Nishi, A.and Miyagi,H.(1993),“A wall-climbing robot using propulsive force of a propeller(mechanism and control in a mild wind)”,JSME International Journal,Series C,Vol.36No.3,pp.361-6.Nishi, A.and Miyagi,H.(1994),“A wall-climbing robot using propulsive force of a propeller(mechanism and control system in a strong wind)”,JSME International Journal,Series C,Vol.37No.1,pp.172-8.Schempf,H.,Mutschler,E.,Chemel,B.and Boehmke,S. (1998),“A robotic pipe-asbestos insulation removal system”,Industrial Robot,Vol.25No.3,pp.196-200. Corresponding authorJun Luo can be contacted at:wqlj1228@T o purchase reprints of this article please e-mail:reprints@ Or visit our web site for further details:/reprints。