基于FPGA和深度学习的智能交通灯系统的设计和实现
基于FPGA的交通灯控制器的设计说明书

设计内容及要求
1、主、支干道的四个路口各设绿、黄、红、左拐、右拐、人行六个指示灯用于 指示状态,两位显示数码管用于显示倒计时时间。 2、当主、支道均有车时,两者交替允许通行,主干道每次放行45s,支干道每次 放行40s,在每次由绿灯转换为左拐,左拐变换为红灯时,要有5s的黄灯作为 过渡。 3、每个灯亮到最后5s时,都有闪烁。 4、通行延时功能,智能交通灯控制:当某一干道遇到紧急情况时,需要一直通 行时,允许这支干道处于常通行状态,相应另一条干道处于禁行状态。 5、电子眼功能:当某一干道处于红灯时,如果有车闯过警戒线,那么就会被高 清数码照相机照下来。 6、路况显示功能:当某一干道处于通行时,可以动态的显示:车速,以及路况 信息。 7、硬件主要由FPGA构成,电路复杂,结构紧凑 ,硬件成本比较低。 8、用Verilog HDL语言设计上述功能的交通灯控制器,并用层次化设计方法该电 路。
闪烁子程序
12864显 示子程序
交通灯6个指示灯子程序流程图
状态机设计
整个程序包括五个状态机 例:十字路口左上角的交通灯对应这的9个状态: 分别是红、绿、黄、左拐、黄、右拐、黄、人行、红。
通行延时控制子程序流程图
交通灯闪烁子程序流程图
闯红灯监测子程序流程图
测车辆速度子程序流程图
MS12864R显示子程序流程图
例:主干道绿灯通行,且通行不畅的状态。
此时键8为1,从图4-24看出二极管D7(绿灯)亮,(交通处于通 行状态)数码管显示为11,MS12864R第一行显示的是车013km/h ,第二行显示的是路况:不畅。(此时有车通过,且第一辆车作为 开启MS12864R)
谢谢大家!
谢谢大家!
感谢您的观看!
欢迎批评指导!!
基于FPGA的交通灯设计

数字系统课程设计报告书课题名称基于FPGA的交通灯设计院系姓名学号专业班级指导教师设计时间目录摘要 (1)1设计目的 (2)2设计内容及要求 (2)3系统整体方案及设计原理 (2)4各模块电路设计与实现 (3)4.1 分频模块设计与实现 (3)4.1.1分频模块图4.1.2分频模块程序4.2 交通灯控制器模块设计与实现 (4)4.2.1交通灯控制模块图4.2.2交通灯控制模块程序4.3 1602显示驱动模块设计与实现 (11)4.3.1 1602显示驱动模块图4.3.2 1602显示驱动模块程序5系统仿真及硬件下载 (18)5.1系统仿真(步骤,总原理图,仿真图) (18)5.1.1系统仿真步骤5.1.2总原理图5.1.3仿真图5.2硬件下载(引脚分配,下载步骤) (19)5.2.1引脚分配5.2.2下载步骤6设计总结 (21)参考文献 (21)摘要可编程逻辑器件的硬件描述语言Verilog HDL,由于它具有类似于通用C语言的风格,被不少FPGA开发者所推崇。
在数字控制这个领域,FPGA的应用也越来越广泛,因此,作为硬件描述语言Verilog HDL就显示出了它的重要性。
它是一种全方位的硬件描述语言,具有极强的描述能力,能支持系统行为级、寄存器传输级和逻辑门级这三个不同层次的设计,因此在实际应用中越来越广泛。
本设计为一个交通灯,控制2个路口的红、黄、绿三盏灯,让其按预置时间进行变化。
以FPGA技术为载体,应用Verilog HDL语言,在QUARTUSII软件环境下,通过模块化编程完成了灯亮时间可调的交通灯控制系统设计,并进行逻辑综合、仿真和硬件下栽。
由于设计采用了FPGA技术,大大缩短了开发研制周期,提高了设计效率。
关键词:交通灯硬件描述语言Verilog HDL FPGA1.设计目的1.掌握利用EDA开发工具QUARTUSII进行可编程逻辑器件设计的方法;2.熟练掌握可编程逻辑器件的原理图输入层次化设计方法;3.掌握利用QUARTUSII进行软件仿真及对可编程逻辑器件进行硬件下载的方法;4.进一步巩固所学的理论知识,提高运用所学知识分析和解决实际问题的能力。
基于FPGA实现的交通灯控制器详解

基于FPGA实现的交通灯控制器详解交通灯控制器是城市交通管理中的重要设备,用来控制红绿灯的改变。
传统的交通灯控制器多采用微控制器或单片机实现,但是这些方式在处理大规模的交通路口时会受到性能和并发处理能力的限制。
为了克服这些问题,近年来,基于FPGA(Field-Programmable Gate Array,现场可编程门阵列)的交通灯控制器逐渐得到应用。
FPGA是一种可编程逻辑器件,能够根据用户需求进行现场编程,具有高度灵活性和可重构性。
基于FPGA的交通灯控制器可以通过并行处理和精确时间管理来提高性能。
FPGA可以为每个交通灯信号灯分配独立的处理器核,同时可以对不同的交通灯进行并发处理。
这种并行处理的方式大大提高了系统的响应速度和处理能力,可以更好地适应高负载的交通场景。
此外,FPGA还可以提供更精确的时间管理。
交通灯的信号改变需要精确地控制时间,以确保交通流畅和交通安全。
传统的微控制器或单片机无法提供足够的精确性和实时性,而FPGA可以通过硬件电路和时钟管理单元来实现高精度的时间控制。
这种精确的时间管理能够对交通流量进行准确的判断和调度,提高交通效率。
此外,基于FPGA的交通灯控制器还具有可扩展性和灵活性。
FPGA的可编程特性使得交通灯控制器可以轻松地进行功能扩展和升级,满足不同场景和需求的要求。
而且,FPGA还可以进行实时调度和优化,可以根据实际交通情况进行动态调整,使交通灯控制系统更加智能和高效。
总之,基于FPGA的交通灯控制器具有高性能、精确的时间管理、可扩展性和灵活性等优点。
它可以提供更好的交通管理和安全保障,适用于大规模的交通路口和复杂的交通场景。
随着FPGA技术的不断发展和成熟,基于FPGA的交通灯控制器将会得到更广泛的应用。
基于FPGA交通信号灯控制器的设计与实现毕业设计
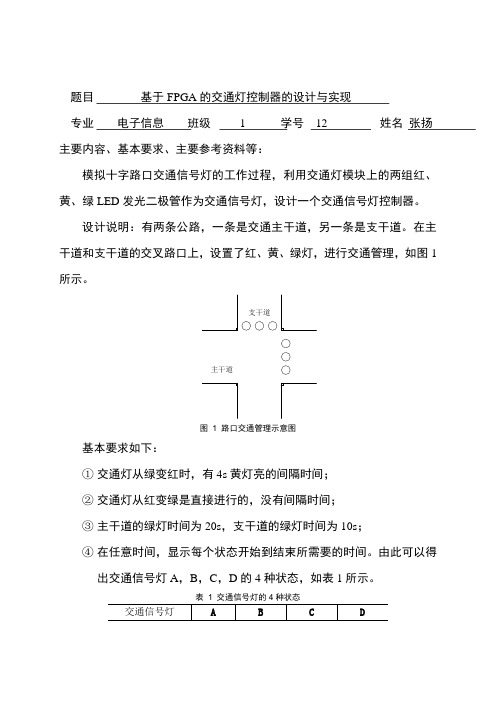
题目 基于FPGA 的交通灯控制器的设计与实现专业 电子信息 班级 1 学号 12 姓名 张扬 主要内容、基本要求、主要参考资料等:模拟十字路口交通信号灯的工作过程,利用交通灯模块上的两组红、黄、绿LED 发光二极管作为交通信号灯,设计一个交通信号灯控制器。
设计说明:有两条公路,一条是交通主干道,另一条是支干道。
在主干道和支干道的交叉路口上,设置了红、黄、绿灯,进行交通管理,如图1所示。
支干道主干道图 1 路口交通管理示意图基本要求如下:① 交通灯从绿变红时,有4s 黄灯亮的间隔时间;② 交通灯从红变绿是直接进行的,没有间隔时间;③ 主干道的绿灯时间为20s ,支干道的绿灯时间为10s ;④ 在任意时间,显示每个状态开始到结束所需要的时间。
由此可以得出交通信号灯A ,B ,C ,D 的4种状态,如表1所示。
表 1 交通信号灯的4种状态 交通信号灯 A B C D主干道的交通灯 绿(20s ) 黄(4s ) 红(10s ) 红(4s )支干道的交通灯红红绿黄主要参考资料:【1】张洪润.FPGA/CPLD应用设计200例(上册)[M].北京:北京航空航天大学出版社,2009.【2】潘松.EDA技术实用教程(第三版)[M].北京:科学出版社,2006. 完成期限:2009年11月到2010年6月指导教师签章:专业负责人签章:2009年11月6日诚信承诺本人__________声明,本论文及其研究工作是由本人在导师指导下独立完成,论文所利用的一切资料均符合论文著作要求,且在参考文献中列出。
作者签字:年月日摘要近年来,随着社会上特别是城市中机动车保有量的不断增加,在现代城市的日常运行控制中,车辆的交通控制越来越重要。
在十字交叉路口,越来越多的使用红绿灯进行交通指挥和管理[1]。
本课题以FPGA硬件描述语言为设计手段,完成了交通信号灯控制电路的开发,其中交通信号灯控制电路的开发目的是设计一个适用于主、支干道十字交叉路口的红黄绿交通灯的控制系统,通过合理设计系统功能,使红黄绿的转换有一个准确的时间间隔和转换顺序,当然这就需要一个自动和安全的系统对红、黄、绿灯的转换进行控制。
基于FPGA的交通灯的设计
课程设计一、设计任务要求基于FPGA的交通灯控制器设计1、总体要求:实现十字路口的交通灯有序显示2、具体要求:按照开发板上的两组红、黄、绿做为南北双向指示灯红灯亮60秒,绿灯亮55秒,黄灯亮5秒要求采用状态机实现状态切换3、附加要求:采用两组两位数码管实现时间倒计时显示二、设计思路1、总体设计方案由设计任务要求可知输入部分有:CLK时钟频率输入,可由实验板上直接提供,本设计选用1kHZ时钟频率。
输出部分有:1)东西方向和南北方向各使用3个LED显示,红黄绿各代表红黄绿灯。
2)东西方向和南北方向计时均为2位数,共需要4个LED七段数码管显示。
由于为共阴极控制,输出三个SEL0,SEL1,SEL2信号控制选择数码管显示,A,B,C,D,E,F,G信号为输出显示的内容。
3)R1,G1,Y1;R2,G2,Y2信号分别为东西南北红绿灯的输出控制信号。
总体设计软件原理图如下所示设计方案原理图:图1A对应13脚; B对应30脚;C对应15脚; D对应31脚;E对应33脚; F对应32脚;G对应35脚; R1对应4脚;R2对应5脚;Y1对应3脚;Y2对应10脚;G2对应8脚;SEL0对应14脚; SEL1对应11脚;SEL2对应12脚.CLK对应24脚;交通灯系统结构图如下所示:红黄绿红黄绿图2状态切换的状态图如下图:图2、模块设计及结果在VHDL设计中,采用自顶向下的设计思路。
顶层模块中,根据硬件设计,设置如下端口:外部时钟信号:Clk东西方向状态灯控制信号:R1,G1,Y1;南北方向状态灯控制信号:R2,G2,Y2;(1)分频模块:由于外部时钟信号clk的频率为1KHz,而实际需要的内部计时时钟频率为1Hz,需要一个分频电路。
输入端口:clk外部时钟信号输出端口:clk_out分频后信号源程序代码如下:数码管显示信号:A,B,C,D,E,F,G;数码管共阴极控制:SEL0,SEL1,SEL2;library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity Frequency1 isport(clk:in std_logic; --外部时钟信号clk_out:out std_logic --分频后信号);end Frequency1;architecture Frequency1_arc of Frequency1 isbeginprocess(clk)variable temp:integer range 0 to 999;beginif(clk'event and clk='1')thenif(temp=999)then --分频计数temp:=0;clk_out<='0';elsetemp:=temp+1;clk_out<='1';end if;end if;end process;end;图4(2)状态选择模块:由于共需要显示4个数字,需要循环点亮7位数码管,该模块通过输入的时钟信号,循环输出4个选择信号。
基于FPGA的交通灯控制电路设计
基于FPGA的交通灯控制电路设计本文介绍了一种基于FPGA的交通灯控制电路设计。
交通灯控制是城市交通管理的一个重要部分,它有助于维护交通秩序,减少交通事故,提高交通效率。
在本电路设计中,我们使用FPGA作为主控制器,并通过数码管、按钮和LED模块与外部交互。
同时,我们还采用了状态机设计方法,以实现灵活的控制逻辑和连续的动态过渡。
首先介绍了本电路设计的硬件设计。
在本设计中,我们使用了FPGA作为主控制器,数码管用于显示当前状态,按钮用于进行手动控制,LED模块用于显示当前灯颜色。
在硬件设计中,我们通过适当的寄存器和时钟模块,实现了稳定的时序控制和同步操作。
接着,我们介绍了本电路设计的软件设计。
在软件设计中,我们采用了状态机设计方法,将交通控制逻辑分为多个状态,通过状态间的转移完成交通灯的切换控制。
具体地,我们将交通灯控制状态划分为三种:绿灯、黄灯和红灯。
在每种状态下,我们通过计数器和状态转移条件来实现精确的时间控制和灯颜色的自动切换。
同时,为了提高控制的灵活性,我们设计了手动控制模式,让用户可以通过按钮手动切换交通灯状态。
最后,我们介绍了本电路设计的实现结果。
在实现过程中,我们使用了Quartus II软件进行综合、布局和验证,并将设计的电路下载到FPGA开发板上进行实验。
实验结果表明,本交通灯控制电路设计实现了稳定、灵活和精确的交通控制,能够满足不同的交通道路需求。
综上所述,本文介绍了一种基于FPGA的交通灯控制电路设计,通过硬件和软件设计,实现了稳定、灵活和精确的交通控制。
该设计可以为城市交通管理提供帮助,为交通事故和交通拥堵的缓解做出贡献。
基于FPGA的智能交通信号灯的设计
基于FPGA的智能交通信号灯的设计智能交通信号灯是一个重要的交通设施,能够引导道路上的交通流动,提高道路交通的效率和安全性。
传统的信号灯系统通常是固定的时间间隔来控制交通流量,但是这种方式无法根据实际道路情况做出灵活的调整,并且无法提前预测交通拥堵的情况。
基于FPGA的智能交通信号灯设计可以利用其高度可编程的特性,结合实时数据分析,实现智能的信号控制系统。
首先,设计智能交通信号灯需要采集道路上的实时交通数据。
可以利用传感器、视频监控等技术,获取车辆的数量、速度、流量等信息,以及行人的行走情况。
这些数据将作为信号灯系统的输入,用于实时分析和控制。
其次,设计一个智能交通信号灯的控制算法。
基于FPGA的灵活性,可以采用神经网络、遗传算法等方法,对采集到的实时数据进行分析和预测,进而生成相应的信号控制策略。
通过实时调整信号灯的绿灯时间,根据交通流量的情况的不断优化信号灯的控制算法,进一步提高交通效率。
接下来,利用FPGA实现智能交通信号灯的控制系统。
FPGA具有高度可编程的特性,可以根据设计需求进行灵活的硬件设计。
使用HDL语言(如Verilog或VHDL)来编写信号灯控制逻辑,并通过FPGA进行硬件设计与实现。
FPGA还可以与传感器、通信模块等其他硬件设备进行连接,实现与外部数据的交互。
最后,进行实际的实验和测试。
将设计好的智能交通信号灯系统应用于实际的道路交通场景中,收集实际使用情况下的数据,进一步改进和优化系统性能。
通过实验和测试,可以验证智能信号灯系统的可行性和实用性,并对系统进行改进和完善。
总结起来,基于FPGA的智能交通信号灯设计需要从数据采集、控制算法、硬件设计和实验测试等方面进行综合考虑。
通过充分利用FPGA的高度可编程性和实时性,结合实时数据分析和控制算法,可以实现更加智能和高效的交通信号灯系统,提高道路交通的流畅性和安全性。
基于FPGA的交通灯设计(课程设计)
FPGA综合设计实验报告题目基于FPGA的交通灯控制器的设计作者专业日期 2013年3月29日1.设计任务:基于FPGA的交通灯控制器的设计2.设计要求:(1)十字路口由一条东西方向的主干道和一条南北方向的支干道构成,主干道和支干道均有红、黄、绿3种信号灯;(2)保持主、支干道红、绿交替变换;(3)绿灯转红灯过程中,先由绿灯转为黄灯,5秒后再由黄灯转为红灯;同时对方由红灯转为绿灯;(4)系统需具有复位及特殊情况紧急处理功能。
(5)了解交通灯控制器的工作原理,完成控制器的硬件电路设计及软件设计。
3.总体设计方案:从题目中计数值与交通灯的亮灭的关系如图(1)所示。
当主干道绿灯55秒和5秒黄灯过渡时,支干道必须禁止通行,即支干道红灯亮55+5=60秒;当支干道由红灯转为绿灯时,支干道亮55秒绿灯和5秒黄灯过渡,此时主干道红灯应亮55+5=60秒。
图1 交通灯控制要求4.硬件电路基本原理分析:动态LED显示的设计方法是将不同LED模块的所有的LED的驱动端一对一地连接到一起,而将其公共极(阴极或阳极)分别由不同的IO口来驱动(主要针对7段码和LED点阵模块)。
动态显示方式主要是出于简化电路和产品成本考虑在大多数场合都可以达到用户要求。
动态显示虽然占用的CPU时间多,但使用的硬件少,能节省线路板空间。
另外,本设计显示需要使用的是4个七段显示数码管。
在计时结果显示电路中,七段数码管显示部分是一个不容忽视的环节,如若处理不得当,可能引起系统功率过大,产生散热问题,严重时甚至会导致系统的烧毁。
为了解决好以上问题,下面就对七段数码管显示电路做简要的分析和介绍。
通常点亮一个LED所需的电流是5~50 mA,通电的电流愈大,LED的亮度愈高,相对的也会使其寿命缩短。
一般以10 mA的导通电流来估算它所必须串联的阻值,其计算方式参考如图1所示。
图1 单个LED的串接电阻计算方式七段显示器可分为共阳极、共阴极型两种,它们都可以等效成8个LED的连接电路,其中如图2就是共阴极型七段显示器的等效电路和每节LED的定义位置图。
(完整word版)基于FPGA的交通灯控制器设计

交通灯控制器设计专业:计算机应用技术班级:计应2 班学号:147030201姓名:蔡利军基于FPGA的交通灯控制器设计摘要超高速硬件描述语言VHDL,是对数字系统进行抽象的行为与功能描述到具体的内部线路结构描述,利用EDA工具可以在电子设计的各个阶段、各个层系进行计算机模拟验证,保证设计过程的正确性,可大大降低设计成本,缩短设计周期。
本文介绍的数字秒表设计,利用基于VHDL的EDA设计工具,采用大规模可编程逻辑器件FPGA,通过设计芯片来实现系统功能。
交通灯控制系统可以实现路口红绿灯的自动控制。
基于FPGA设计的交通灯控制系统具有电路简单、可靠性强、实时快速擦写、运算速度高、故障率低、可靠性高,而且体积小的特点。
本设计采用Altera公司Cyclone系列的EPlC3T1444C8芯片,在Quartus II软件平台上使用VHDL语言,采用自顶向下的设计方法对系统进行了模块化设计和综合,并进行了仿真。
该系统可实现十字路口红绿灯及左转弯控制和倒计时显示,仿真结果结果表明系统能够自动控制交通灯转变。
关键词:VHDL,交通灯,EDA目录前言 (1)第1章 FPGA概述 (2)1.1 FPGA的简介 (2)1.2 FPGA的应用 (2)第2章 VHDL硬件描述语言 (3)2.1 VHDL程序基本结构 (3)2.1.1 实体 (4)2.1.2 结构体 (4)2.1.3 库 (5)2.2 VHDL语言 (5)2.2.1 VHDL文字规则 (5)2.2.2 VHDL数据对象 (5)2.2.3 VHDL数据类型 (6)2.2.4 VHDL 顺序语句 (6)2.2.5 VHDL并行语句 (6)第3章系统设计与仿真 (7)3.1 系统介绍 (7)3.1.1 设计任务 (7)3.1.2 设计要求 (7)3.2 系统设计仿真 (8)3.2.1 顶层框图的设计 (8)3.2.2 时序状态图的设计 (9)3.2.3 工程设计流程框图: (10)3.2.4 芯片的选择 (10)3.2.5 各个模块的设计与仿真 (11)结论 (27)附录..................................... 错误!未定义书签。
基于FPGA的交通灯控制器设计_毕业设计论文

基于FPGA的交通灯控制器设计_毕业设计论文摘要:随着城市交通拥堵问题的日益严重,交通灯控制器作为城市交通管理的重要组成部分,起着至关重要的作用。
在传统的交通灯控制系统中,使用的是基于微控制器或PLC的硬件实现方式,无法满足日益复杂的交通需求。
本论文提出了一种基于FPGA的交通灯控制器设计方案,通过利用FPGA的高度可编程性和并行处理能力,实现了对交通灯状态的实时监控和控制。
设计方案通过数码管和按钮进行交互,利用图形化编程软件进行开发和调试。
实验结果表明,所设计的FPGA交通灯控制器具有优异的性能和稳定性,能够满足各种交通场景下的需求。
关键词:交通灯控制器;FPGA;并行处理;图形化编程一、引言随着城市交通流量的不断增加,传统的交通灯控制系统已经不能满足日益复杂的交通需求。
传统的交通灯控制器使用的是基于微控制器或PLC的硬件实现方式,无法提供足够的计算性能和并行处理能力。
因此,本论文提出了一种基于FPGA的交通灯控制器设计方案,通过利用FPGA的高度可编程性和并行处理能力,实现对交通灯状态的实时监控和控制。
二、设计方案本设计方案采用了FPGA作为控制器的核心,通过图形化编程软件进行开发和调试。
设计方案将交通灯控制分为四个主要模块:状态监控模块、状态控制模块、显示模块和按钮模块。
状态监控模块通过检测车辆和行人的状态,实时监控交通灯的状态。
状态控制模块根据交通流量和优先级进行状态切换和调度。
显示模块将交通灯状态显示在数码管上,方便行人和司机观察。
按钮模块通过按钮输入交通灯的初始状态,实现手动控制。
三、系统实现本系统采用Xilinx FPGA开发板进行实现,使用Verilog HDL进行程序编写。
在设计过程中,通过数码管和按钮进行交互,实现手动控制和状态显示。
图形化编程软件使得开发和调试更加便捷,节省了开发周期和人力资源。
四、实验结果通过对实验数据的分析和对比,我们发现所设计的FPGA交通灯控制器在交通流量大、复杂交叉路口和斑马线等特殊情况下,都能够稳定运行并保证交通流畅度。
基于FPGA的交通灯控制器的设计
基于FPGA的交通灯控制器的设计交通灯控制器是现代城市交通系统中至关重要的组成部分。
传统的交通灯控制器通常是基于微控制器或单片机设计的,但随着技术的发展,基于现场可编程门阵列(Field-Programmable Gate Array,FPGA)的交通灯控制器越来越受到关注。
本文将介绍基于FPGA的交通灯控制器的设计。
FPGA是一种可编程逻辑器件,具有高度灵活性和可重配置性。
与传统的微控制器相比,FPGA能够并行处理多个任务,提供更高的性能和更低的延迟。
在交通灯控制器的设计中,这种并行处理的能力可以显著提高交通信号的响应速度和效率。
首先,我们需要确定交通流量检测的方式。
常用的交通流量检测方法有传感器检测、视频图像处理和无线通信等。
在基于FPGA的交通灯控制器设计中,我们可以选择使用传感器检测的方法。
传感器可以通过检测来往车辆的存在与否来确定交通流量,然后将这些数据传输到FPGA中进行处理。
其次,我们需要设计合适的交通灯控制算法。
传统的交通灯控制算法主要基于定时控制,但这种方法无法根据实际交通流量进行动态调整。
在基于FPGA的交通灯控制器设计中,我们可以采用基于车辆检测数据的自适应控制算法。
该算法可以根据交通流量的变化情况灵活地调整交通信号的周期和相位,以实现最优的交通流控制。
接下来,我们需要将交通灯控制算法实现在FPGA上。
使用HDL (Hardware Description Language)编程语言,如Verilog和VHDL,可以将交通灯控制算法描述为硬件逻辑电路。
然后,通过使用FPGA的开发工具,将HDL代码编译成可在FPGA上运行的位流文件。
通过将交通灯控制算法实现在FPGA上,可以实现高速的并行处理和低延迟的响应。
最后,我们需要连接FPGA与交通灯控制设备。
FPGA可以通过GPIO (General Purpose Input/Output)接口与其他设备进行通信。
通过将FPGA的输出信号与交通灯控制设备的输入信号连接,可以实现对交通灯的控制。
基于FPGA的交通灯控制器设计毕业设计
基于F P G A的交通灯控制器设计毕业设计Modified by JEEP on December 26th, 2020.基于FPGA的交通灯控制器设计摘要超高速硬件描述语言VHDL,是对数字系统进行抽象的行为与功能描述到具体的内部线路结构描述,利用EDA工具可以在电子设计的各个阶段、各个层系进行计算机模拟验证,保证设计过程的正确性,可大大降低设计成本,缩短设计周期。
本文介绍的数字秒表设计,利用基于VHDL的EDA设计工具,采用大规模可编程逻辑器件FPGA,通过设计芯片来实现系统功能。
交通灯控制系统可以实现路口红绿灯的自动控制。
基于FPGA设计的交通灯控制系统具有电路简单、可靠性强、实时快速擦写、运算速度高、故障率低、可靠性高,而且体积小的特点。
本设计采用Altera公司Cyclone系列的EPlC3T1444C8芯片,在Quartus II软件平台上使用VHDL语言,采用自顶向下的设计方法对系统进行了模块化设计和综合,并进行了仿真。
该系统可实现十字路口红绿灯及左转弯控制和倒计时显示,仿真结果结果表明系统能够自动控制交通灯转变。
关键词:VHDL,交通灯,EDATHE LIGHT CONTROLLER BASED ON FPGA DESIGNABSTRACTWith the development of the economy, microelectronic technology, computer technology and the automatic theory are developed rapidly. Its application is becoming more and more widely. But the traffic light as an important traffic,it also has developed quickly with the improving requirement of the all the system of the traffic light, The system of traffic control which designed based on FPGA is received by more and more people.The system of traffic control can realize the automatic control of traffic light in a intersection. The system of traffic control which designed based on FPGA has many characteristics such as simple circuit, reliable operation, toerase function quickly with real-time applications, high speed, high reliability, low failure rate, and sma ll volume. By using the platform of software design system Quartus II and the form of the VHDL language, we simulate the system by using EPlC3T1444C8 Mars device and the result show that the download system can automatically control the traffic lights.KEY WORDS: VHDL,traffic light,EDA目录前言当今社会是数字化的社会,是数字集成电路广泛应用的社会。
课程设计(论文)基于fpga的交通信号灯设计
基于FPGA的交通信号灯设计摘要:该设计是针对交通信号灯控制器的设计问题,采用EDA技术实现的交通灯控制电路的设计方案。
本设计有效的克服了传统的交通灯控制的缺点而采取自上而下的设计思路。
该设计在软件QuartusⅡ9.0下应用硬件描述语言VHDL语言完成设计文件,并对其进行了功能仿真和时序仿真,且给出了相应的仿真结果,绘制出了具体的逻辑电路,最后将其下载到Alter公司生产的CycloneⅡ系列的EP2C8Q208开发板上进行逻辑验证,实现软件和硬件的安全连接,达到了对交通灯的自动安全控制的目的。
关键字:交通灯控制;EDA;VHDL;QuartusⅡ;EP2C8Q208Traffic control lights design based on FPGA Abstract:The design is for traffic signal controller design issues based on EDA technology for traffic light control circuit design. This design effectively overcome the traditional traffic light control weaknesses and take a top-down approach to design. The design in software QuartusⅡ 9.0 under hardware description language VHDL complete design documents go on functional simulation and temporal simulation,it draws out the specific logic circuits and giving the simulation results, and last download it to Alter corporate production of CycloneⅡseries of EP2C8Q208 Development Board for logical validation, it implement software and hardware security connection and reached the traffic lights of automatic safety control purposes.Key Words: traffic light control;EDA;VHDL;QuartusⅡ;EP2C8Q208引言随着社会和汽车工业的快速发展,近几年机动车辆急剧增加,道路超负荷承载现象日趋严重,致使交通事故逐年增加。
基于FPGA交通灯控制器设计
基于FPGA交通灯控制器设计引言:近年来,城市交通的快速发展给城市交通管理带来了巨大的挑战。
交通灯系统是一项重要的交通管理设施,能够保证出行的安全和有序。
传统的交通灯控制器通常基于微控制器或PLC,但是随着FPGA(Field Programmable Gate Array)技术的发展,越来越多的交通灯控制器开始采用FPGA来实现,以提供更高的实时性和可编程性。
设计目标:本文旨在设计一个基于FPGA的交通灯控制器,以实现交通灯的准确、稳定和快速的切换,以提高交通流量的效率和道路的安全性。
FPGA交通灯控制器的设计:FPGA交通灯控制器的设计主要包括以下几个步骤:1.系统功能设计:首先,需要确定系统的功能需求,即要实现的交通灯控制策略。
例如,可以采用定时控制、感应控制或组合控制等方式来决定交通灯的切换规则。
2.硬件设计:根据系统功能需求,设计FPGA的硬件电路,包括FPGA芯片的选择、外围电路的设计和电源等。
3. 程序设计:编写FPGA的逻辑代码,实现交通灯控制的算法和逻辑。
可以使用硬件描述语言(HDL)如Verilog或VHDL来实现。
4.仿真验证:使用FPGA开发工具进行仿真验证,确保交通灯控制器的功能和性能达到设计要求。
5.硬件调试和优化:根据仿真结果,对硬件电路进行调试,并优化电路设计,以提高交通灯控制器的性能和稳定性。
6.硬件实现:将设计好的交通灯控制器加载到FPGA芯片中,并与其他外围设备(如传感器、通信模块等)进行连接。
7.系统测试和验收:对交通灯控制器进行系统测试,验证其在实际环境中的功能和性能,并根据实际需求进行调整和优化。
设计考虑:在设计FPGA交通灯控制器时1.实时性:交通灯控制需要具备高实时性,能够及时响应交通信号的变化,并快速切换信号灯。
2.稳定性:交通灯控制器需要具备稳定性,能够保持信号灯的状态稳定和可靠。
3.可编程性:FPGA交通灯控制器应具有良好的可编程性,能够根据需求进行灵活配置和调整。
基于FPGA的智能交通灯的设计与开发
基于FPGA的智能交通灯的设计与开发近年来,随着城市化进程的不断加快,交通拥堵问题日益突出。
智能交通灯作为城市交通管理的重要组成部分,其控制策略的优化与改进显得尤为重要。
本文将基于FPGA技术,对智能交通灯进行设计与开发,以实现交通流的优化与提高路口的通行效率。
首先,我们需要设计一个基于FPGA的智能交通灯控制系统。
该系统的核心是交通灯控制器,通过使用FPGA来实现交通灯的逻辑控制规则。
交通灯控制器可以根据交通流量和道路情况,调整交通灯的信号灯状态,以实现交通流的最大化。
同时,系统还需要与传感器和摄像头等设备进行联动,实时获取交通流量和车辆情况,以便更好地调整交通灯的控制策略。
其次,我们需要设计一个高性能的交通流量检测模块。
该模块可以使用FPGA实现图像处理算法,对交通流量进行实时检测和统计。
通过分析图像数据,可以精确计算出每个方向上的车辆数量和车辆类型,从而更好地进行交通灯的控制和调度。
此外,我们还可以加入智能算法和优化算法来进一步提高交通灯的控制效果。
例如,可以使用智能算法来预测未来一些时刻的交通流量,从而根据预测结果来调整交通灯的控制策略。
同时,还可以使用优化算法来寻找最佳的交通灯控制策略,以进一步提高路口的通行效率和缓解交通拥堵问题。
最后,我们需要进行实验和测试,验证设计与开发的有效性和可行性。
通过使用FPGA作为硬件平台,可以快速实现智能交通灯控制系统,并对系统进行实时监测和调试。
如果实验结果表明系统具有较好的交通流调整效果和通行效率,则可以进一步优化和完善系统。
综上所述,基于FPGA的智能交通灯的设计与开发是一项颇具挑战性的工作。
通过充分发挥FPGA的可编程性和并行计算能力,可以实现智能交通灯的高效控制和优化,从而提高城市交通管理的水平和效率。
同时,设计与开发的成功将为解决城市交通拥堵问题提供一种新的思路和方法。
基于FPGA和深度学习的智能交通灯系统的设计和实现

CHINA COLLECTIVE ECONOMY摘要:文章在Quartus II环境下,利用VHDL语言并结合硬件电路设计了一种基于FPGA芯片和深度学习的智能交通灯控制系统。
该系统由控制模块、时钟分频模块、分位模块、显示模块和图像识别模块组成。
图像识别模块是利用深度学习的方法来实现其功能,其它模块的功能是利用VHDL 语言来实现,在Quartus II平台上进行分模块编译、仿真,并生成相应的模块元件,然后通过顶层电路图进行连接,最后进行编译和仿真。
图像识别模块的加入使得系统可对紧急情况下的交通路口进行快速有效管理,从而实现交通灯控制系统的智能化。
关键词:Quartus II;FPGA;深度学习; VHDL;仿真;智能交通灯控制系统随着社会的发展,人们出行频率越来越高,汽车数量急剧增加,城市道路也日渐拥挤,在这样的背景下交通灯控制系统设计的合理化和智能化显得尤为重要。
如今市场上常见的交通灯控制系统虽然可以实现正常的路口交通控制和管理功能,但是其无法实现对于紧急情况下突发事件进行快速有效处理,例如当警车、救火车、消防车在交通路口出现时市场上的交通灯控制系统无法对路口交通进行快速控制和管理以便紧急车辆可以快速通过。
然而对于这些紧急情况下突发事件的处理非常重要,因为这关乎到人的生命、国家的财产损失等。
所以设计一款能够实现处理紧急情况下突发事件的智能交通灯系统非常重要。
在这个背景下,本文设计了一款基于FPGA芯片和深度学习的智能交通灯控制系统,该系统是利用FPGA芯片和深度学习模型来实现的。
文章通过电路仿真来验证交通灯系统的功能是否实现,利用FPGA设计电路从而有效降低设计成本,缩短设计周期,保证电路设计的正确性。
同时,为实现对于紧急情况下的突发事件处理,在整个电路系统中设计了一个基于深度学习的图像识别模块,利用该模块可对紧急车辆进行识别判断。
由于对于紧急情况下的突发事件处理的重要性使得该系统的设计具有比较广泛的应用和很强的研究意义,同时,本文设计的智能交通灯控制系统结构简单、稳定性好。
基于FPGA的智能交通灯的设计与开发
基于FPGA的十字路口交通信号灯摘要本文主要介绍十字路口交通灯控制器的设计。
首先,介绍交通控制系统以及交通红绿灯控制电路的发展现状;然后采用硬件描述语言进行的交通灯控制器设计。
重点介绍了控制系统各部分的设计,以及各个模块之间的同步处理。
为了克服交通信号灯控制系统传统设计方法的弊端,更加适应城镇交通现状,利用VHDL语言、采用层次化混合输入方式,设计了具有3种信号灯和倒计时显示器的交通信号灯控制系统,在QuartusⅡ下进行仿真,并下载到FPGA 中制作成实际的硬件电路进行了模拟运行.使用该方法设计的交通灯控制系统电路简单、运行可靠、易于实现,可实现对交通信号的控制和显示功能。
关键词HDPLD;十字路口交通灯;控制器;车辆行人安全Based on FPGA intersection traffic lightsAbstractThis paper mainly introduces the intersection traffic lights the controller design. First, introduce traffic control system and the traffic lights control circuit development present situation; Then the hardware description language of traffic light controller design. Mainly introduces control system design, and thevarious parts of the synchronous processing between each module. Finally, simulation, test controller is correct.Key wordsHDPLD; Crossing traffic lights; Controller; Vehicle pedestrian safety1 前言城市交通是一个集经济性与社会公益性于一体的领域,包括管理体制、城市规划布局、投融资体制、交通方式选择、公共交通运营组织、交通需求管理、交通流量控制与管理等等方面的内容,涉及到管理、法规、规划、工程、TRANBBS技术、财政、教育、环境、能源、信息以及人文等社会经济诸多学科领域。
基于FPGA技术的智能交通灯控制系统设计

基于FPGA技术的智能交通灯控制系统设计
随着我国汽车数量越来越多,现阶段的交通灯模式采用的是定时控制,由于车流量是随时变化的。
当此时没有车通过,而相对的车要等到此方向的绿灯结束显示红灯才能通过,在时间和空间方面的应变性能较差,这样不仅浪费了时间,还使得相对方向的车辆造成堵车现象。
要想解决城市的大堵车现象,改善原有的交通灯控制系统是很有必要的。
因此本文在EDA技术的基础上,利用FPGA的相关知识设计了交通灯控制系统,可以根据实际情况对灯亮时间进行自由调整,整个设计系统通过Max+PlusⅡ软件进行了模拟仿真,并下载到FPGA器件中进行硬件的调试,验证了设计的交通信号灯控制电路完全可以实现预定的功能,具有一定的实用性。
1、系统设计要求
所设计的交通信号灯控制电路,主要适用于在两条干道汇合点形成的十字交叉路口,路口设计两组红绿灯分别对两个方向上的交通运行状态进行管理。
交通灯的持续闪亮时间由键盘输入控制。
灯亮时序如图1所示,当B方向的红灯亮时,A方向对应绿灯亮,由绿灯转换成红灯的过渡阶段黄灯亮,即B 方向红灯亮的时间等于A方向绿灯和黄灯亮的时间之和。
同理,当A方向的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于FPGA和深度学习的智能交通灯系统的设计和实现作者:何梓欣来源:《中国集体经济》2018年第25期摘要:文章在Quartus II环境下,利用VHDL语言并结合硬件电路设计了一种基于FPGA 芯片和深度学习的智能交通灯控制系统。
该系统由控制模块、时钟分频模块、分位模块、显示模块和图像识别模块组成。
图像识别模块是利用深度学习的方法来实现其功能,其它模块的功能是利用VHDL 语言来实现,在Quartus II平台上进行分模块编译、仿真,并生成相应的模块元件,然后通过顶层电路图进行连接,最后进行编译和仿真。
图像识别模块的加入使得系统可对紧急情况下的交通路口进行快速有效管理,从而实现交通灯控制系统的智能化。
关键词:Quartus II;FPGA;深度学习;VHDL;仿真;智能交通灯控制系统随着社会的发展,人们出行频率越来越高,汽车数量急剧增加,城市道路也日渐拥挤,在这样的背景下交通灯控制系统设计的合理化和智能化显得尤为重要。
如今市场上常见的交通灯控制系统虽然可以实现正常的路口交通控制和管理功能,但是其无法实现对于紧急情况下突发事件进行快速有效处理,例如当警车、救火车、消防车在交通路口出现时市场上的交通灯控制系统无法对路口交通进行快速控制和管理以便紧急车辆可以快速通过。
然而对于这些紧急情况下突发事件的处理非常重要,因为这关乎到人的生命、国家的财产损失等。
所以设计一款能够实现处理紧急情况下突发事件的智能交通灯系统非常重要。
在这个背景下,本文设计了一款基于FPGA芯片和深度学习的智能交通灯控制系统,该系统是利用FPGA芯片和深度学习模型来实现的。
文章通过电路仿真来验证交通灯系统的功能是否实现,利用FPGA设计电路从而有效降低设计成本,缩短设计周期,保证电路设计的正确性。
同时,为实现对于紧急情况下的突发事件处理,在整个电路系统中设计了一个基于深度学习的图像识别模块,利用该模块可对紧急车辆进行识别判断。
由于对于紧急情况下的突发事件处理的重要性使得该系统的设计具有比较广泛的应用和很强的研究意义,同时,本文设计的智能交通灯控制系统结构简单、稳定性好。
一、智能交通灯控制系统的结构和设计原理本文设计的智能交通灯控制系统可以对十字路口的两个方向进行交通指挥,每个方向有绿、黄和红三种指示灯,它们的持续时间分别为20s、5s和25s。
同时,该智能交通灯控制系统可以在任何一条路口出现紧急情况时,如当消防车、救护车、警车或其它需要优先放行的车辆通过时,各方向上均是红灯亮,倒计时停止。
当紧急情况结束后,控制系统恢复原来状态,继续正常运行。
同时,为了实现十字路口对于紧急情况的及时有效处理,系统设计了一个图像识别模块,用于在几百米外提早检测到紧急情况,并向系统传入紧急情况信号,从而交通灯控制系统可以及早对十字路口进行交通管控以便紧急车辆可以快速通过,以避免生命的伤亡、国家财产的损失。
本文设计的智能交通灯控制系统由五个模块组成,分别为控制模块、时钟分频模块、分位模块、显示模块和图像识别模块。
本文设计的智能交通灯控制系统有三个输入信号,分别为系统输入信号clk20m、置位信号reset和紧急情况信号hold。
clk20m通过分频模块可分别得到1Hz和10Hz频率信号,分别用来向controller模块和display模块提供时钟脉冲。
controller模块根据时钟脉冲上升沿开始计数,将数据传输到numa和numb两个端口,并对reda、greena、yellowa和redb、greenb、yellowb两组红、绿、黄灯开始控制。
分位模块时钟由系统输入时钟clk20m控制,将controller 模块输出端口numa和numb传输过来的数据分为十位数和个位数分别存到numina、numinb和numinc、numind两组两位数组里,然后分别送到display模块,利用display模块显示输出端口numina、numinb和numinc、numind的数据。
二、智能交通灯控制系统分模块的设计原理及实现本设计在Quartus II软件中采用混合编译的方法来实现智能交通灯控制系统的功能,故在设计智能交通灯控制系统前,需要先进行智能交通灯控制系统电路核心模块的设计。
在设计智能交通灯控制系统核心模块时,首先分析了各个模块的设计原理,然后通过VHDL语言的程序编译或输入原理图的方法来实现各个模块的功能,最后在Quartus II软件中编译生成元器件单元,为之后搭建智能交通灯控制系统做好准备。
(一)控制模块的功能及实现控制模块是通过对该模块的VHDL程序进行编译来生成模块的功能元器件,生成的功能元器件要实现的功能是根据计数器的计数值和紧急情况控制发光二极管的颜色、亮灭,以及输出倒计时数值给分位电路模块以便在显示电路模块上进行显示。
在Quartus II软件中对设计的控制模块进行仿真,仿真的结果为当有紧急情况发生时,输入信号hold=‘1’时计数器暂停计数,输出信号reda=redb=‘1’,两个路口的红绿灯点亮为红色。
当输入信号hold=‘0’时计时器开始计数,开始B路口的红绿灯亮为红色,A路口的红绿灯先亮为绿色,亮灯时间为20s(19倒计时到0);接着A路口的红绿灯亮为黄色,亮灯时间为5s(4倒计时到0)。
紧接着A路口的红绿灯点亮为红色,B路口的红绿灯先亮为绿色,亮灯时间为20s(19倒计时到0);最后B路口的红绿灯亮为黄色,亮灯时间为5s(4倒计时到0)。
由上面的仿真结果知道该设计满足了交通控制灯的设计要求,该设计可以实现控制模块的功能。
(二)时钟分频模块的功能及实现本文设计的时钟分频模块要实现的功能是可对系统时钟信号(设为20MHz)进行分频,分频可得到10Hz和1Hz的时钟信号。
编写该模块的VHDL语言,对其进行编译仿真,仿真得到的结果为当输入的时钟信号为20MHz时,可通过更改VHDL语言中的参数分别得到10Hz 和1Hz的时钟信号。
由仿真结果知道该设计可以实现时钟分频模块的具体要求。
(三)分位模块的功能及实现分位模块主要的作用是将输出的倒计时数值分成两个单独的数字。
这是因为控制模块输出的倒计时数值可能时1位或者2位十进制,而七段数码管的屏幕只能显示最大数值为9的数字,所以为了将倒计时的数值显示出来需要先进行分位处理,即将倒计时数值分为两个1位的十进制,如25分位为2和5;7分位为0和7。
对该模块的VHDL程序进行编写,在Quartus II 软件中对该模块进行编译仿真,仿真的结果为在时钟信号clock上升沿到来的时候电路会读取输入信号numin的值,然后将输入信号numin的十位数和个位数分别存到输出信号numa和numb里。
例如当numin=“10”时,numa=‘1’,numb=‘0’;当numin=“25”时,numa=‘2’,numb=‘5’。
由仿真结果可知该模块可以实现分位功能。
(四)显示模块的功能及实现显示模块的作用是用于显示交通灯的倒计时数值,该显示模块采用的是七段译码器的编译码规则。
将十进制数据转化为对应的七段译码器数据。
对该模块的VHDL程序进行编写,在Quartus II软件中对该模块进行编译仿真,仿真的结果为当时钟信号clock上升沿到来时输入端qin=“0”时输出端display=“0111111”,数码管显示的数字为0;当qin=“1”时x=“0000110”,数码管显示的数字为1;当qin=“2”时x=“1011011”,数码管显示的数字为2;当qin=“3”时x=“1001111”,数码管显示的数字为3;当qin=“4”时x=“1100110”,数码管显示的数字为4;当qin=“5”时x=“1101101”,数码管显示的数字为5;当qin=“6”时x=“1111101”,数码管显示的数字为6;当qin=“7”时x=“0000111”,数码管显示的数字为7;当qin=“9”时x=“1101111”,数码管显示的数字为9;当qin=“10”和“11”时x=“0000000”。
由此可知仿真图符合编程的要求,输入数据qin和数码管的显示数据一样,该设计实现了显示电路的功能。
(五)图像识别模块的功能及实现图像识别模块的作用是在距离十字路口几百米外对紧急车辆进行识别判断,当判断是紧急车辆时,在车辆未到达时对交通路口进行快速有效管理以便紧急车辆快速通过。
该模块是基于深度学习来实现的,该模块是在caffe平台上利用计算机视觉领域中目标检测框架Faster R-CNN来实现对紧急车辆的识别,该目标检测框架利用了CNN卷积网络来对图像的特征进行提取,利用RPN网络来生成区域建议窗口。
在训练目标检测模型时,使用的训练集的大小为11368张图片,有三种图片类别,分别为警车、消防车和救护车。
测试集的大小为260张图片。
模型检测的准确度为90.6%。
该模型基本上可以满足正常的检测需求,可以在实际应用中准确检测到紧急车辆,并将信号传输给控制模块。
三、智能交通灯控制系统的实现与仿真分析(一)智能交通灯控制系统的设计与实现如图1所示。
(二)智能交通灯控制系统电路的仿真波形图分析:图2是在 B路口亮红灯时A路口先后亮绿灯和黄灯的情况。
其中displaya、displayb、displayc和displayd分别为A路口倒数时间的十位数、A路口倒数时间的个位数、B 路口倒数时间的十位数、B路口倒数时间的个位数。
由图2可以发现在时钟脉冲clk20m的作用下当输入信号hold=‘0’且reset=‘0’时计时器开始计数,B路口的红绿灯亮为红色,亮灯时间为25s(displayc和displayd从24s倒计时);A路口的红绿灯先亮为绿色,亮灯时间为20s (displaya和displayb从19倒计时);接着A路口的红绿灯亮为黄色,亮灯时间为5s (displaya和displayb从4倒计时到0)。
由图1可以发现该设计的显示功能正常实现。
接下来B路口会重复A路口的上一次动作,如此循环下去。
四、结语本文针对在交通路口紧急车辆需要快速通过的市场需求设计了一款基于FPGA芯片和深度学习的智能交通灯控制系统。
该系统利用Quartus Ⅱ软件采用VHDL语言编程实现交通灯控制系统的设计、仿真,并通过仿真的结果来验证交通控制灯的功能。
同时,为了实现对于紧急情况的快速处理,系统引入了图像识别模块,该模块是利用深度学习的模型来实现对于紧急车辆的检测,利用该模块在交通路口几百米外的地方可成功实现对紧急车辆的检测识别,这使得在紧急车辆到达前可对交通路口的车辆进行有效管理,从而使得紧急车辆在交通路口可快速通过。
可对紧急情况下的突发事件进行有效处理使得该系统具有比较好的应用前景。
参考文献:[1]杨晓慧.FPGA系统设计与实例[M].人民邮电出版社,2009.[2]张晓荣.智能交通灯的设计及其FPGA的实现[J].传感器世界,2013(01).[3]杜瑞雪.基于FPGA的轮询控制智能交通灯系统的设计[J].实验科学与技术,2017(01).[4]林晓翠.基于深度学习的车辆检测研究[D].厦门大学,2016.[5]曹诗雨.基于Fast R-CNN的车辆目标检测[D].西安交通大学,2017.[6]张飞云.基于深度学习的车辆定位及车型识别研究[D].江苏大学,2016.(作者单位:郑州外国语学校)。