MCT8000F88100F88200F8系列运动控制器
8100智能水泵变频器说明书(130-190)-2015-09-08

- 08 -
第二章 型号、外观及接线
2.1 型号说明
8100 系列
2.2 外形尺寸和安装尺寸
0.75 ~ 2.2KW 外型尺寸及安装尺寸示意图
4KW ~ 7.5KW 外型尺寸及安装示意图
- 09 -
8100 系列 11kW ~ 18.5kW 外型尺寸及安装尺寸示意图
22kW ~ 37kW 外型尺寸及安装尺寸示意图
注:参数表中标注“●”的参数,请在停机状态下修改 , 标注“◎”的参数 为实际检测记录值,不能更改。
举例:将 F0.02 从 0 改为 1, 长按菜单键 2 秒可进入参数组。
- 07 -
1.4 压力设置说明
8100 系列
附:压力换算关系式: 0.1MPa( 兆帕 ) = 100KPa( 千帕 ) = 1Bar( 巴 ) = 1Kgf / cm2 ( 公斤力 / 平 方厘米 )
■ 其它
◎严禁私自改造变频器,否则可能引致人员伤亡。擅自更改后的变频器将不再享受保修 服务。
- 05 -
第一章 操作面板说明
1.1 操作面板示意图
8ห้องสมุดไป่ตู้00 系列
(1) 菜单:从固定模式转到参数模式时使用。 (2) 压力 / 设定:设定水压快捷键以及设定参数时的确定键。 (3) 移位:切换显示内容以及修改参数时移动光标用。 运行状态下按“移位” 键可在运行频率、输出电流、设定压力以及反馈压 力之间来回切,修改参数时,按“移位”键,闪烁位为当前可修改位。 (4) ▲▼键:用于设定参数值和设定压力值的修改。 (5) 运行:启动方式为键盘时的启动按钮。 (6) 停止 / 复位:启动方式为键盘时的停止按钮和故障复位按钮。 (7) 停机时参数监控状态下按“移位”键 5 秒以上,F0、F1 组参数可恢复出 厂设置,当屏幕显示的提示字母“End”结束后,表示恢复出厂设置完成。
麦克维尔产品手册
10101010101010101010101010101010101010101010101010101010101010101010101001010101010101010101010101010101010100101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010101010010101010101010101010101010101010101001010101010101010101010101010101010101010101010101010101010101010101010101010101010101001010101010101010101010101010101010100101010
E3612/C3612 E3612/C3012 E3612/C3012 E3612/C3012 E3612/C3612 E4212/C3612 E4212/C3612 E4212/C3612 E4212/C3612 E4212/C3612 E4212/C4212 E4812/C4812
制冷量
RT
750
型号
WSC WDC WSC(H) WDC(H) WMC HSC PFS PFS XE PES WMD WHS.B HHS.B CUW CUW-HR CUWD-HR CUWD CUWD-HC WGZ-B
制冷量
制冷剂
300RT〜1300RT
HFC-134a
600RT〜2560RT 600RT〜1200RT 1200RT〜2300RT 140RT〜287RT
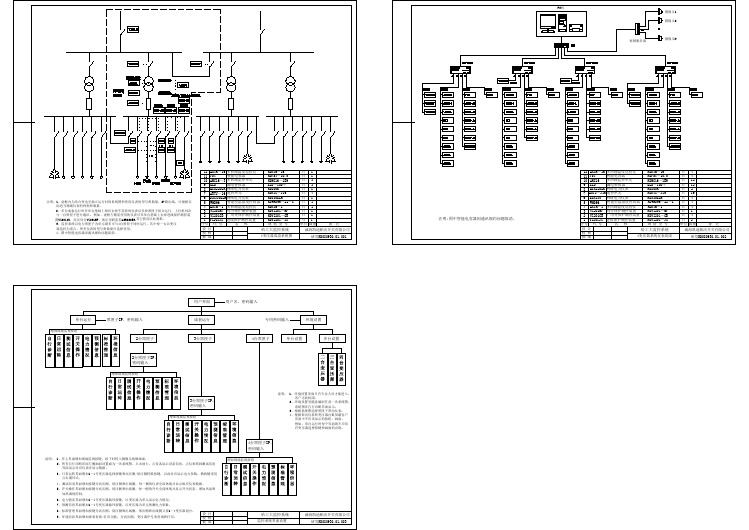
变压器监控系统图-变压器监控系统图
「精灵」8000火灾自动报警控制系统简介

「精灵」8000火灾自动报警控制系统简介1 关于「精灵」8000火灾自动报警控制系统「精灵」8000火灾自动报警控制系统是高度智能化的系统,属于第五代产品,有多种智能型火灾探测器件,可以满足不同建筑物对火灾自动报警方式及消防联动控制功能的特别要求,所有用户操作接口,包括控制器面板、中央监控软件等都经过专门设计,维护和管理工作非常简便。
可针对建筑物及其内部设施的火灾危害性进行设计,实现对早期火灾的可靠监视及报警,保证及时发现和通报火灾,自动发出控制信号给有关消防设备,消除火灾隐患、控制烟气蔓延、阻止火灾扩展、减少火灾危害甚至扑灭火灾,避免或降低灾害情况下造成的人员和财物损失,保障防火安全。
「精灵」8000系统产品具有中国国家消防电子产品质量监督检测中心颁发的检测合格报告,并荣获下列国际体系及产品的质量证书:1.ISO 9001国际质量体系认证 2.LPCB 安全及质量体系认可之供货商 3.BSi 质量管理系统证书 4. 中国国家消防产品质量认证证书SYSTEM 80002 「精灵」8000火灾自动报警控制系统结构如图所示:「精灵」8000系统由火灾报警控制器、消防联动控制设备、火灾探测装置、手动火灾报警按钮、功能模块、彩色图形显示装置与打印机等系统设备组成。
火灾报警控制器有8007、8000C、8000M以及8000系列的智能型控制器,接收、显示并处理各种报警信号,具备消防联动控制功能。
●中文彩色图形显示装置与打印机终端连接在火灾报警控制器RS232信号接口上,接收、显示、记录火灾报警控制器传来的系统运行信息,具有火灾报警自动切换出报警平面图并动态显示报警点的功能,值班人员可更加清楚报警事件的情况,为灭火工作赢得宝贵的时间。
●消防联动控制柜设置手动/自动控制模式开关,设置手动控制面板与硬线线路,具备手动控制功能,可对消防水泵、消防风机、非消防电源配电箱、消防广播、防火卷帘、电梯、燃气阀等重要消防设备直接发出控制信号(可按实际需要配置)。
多轴运动控制器和驱动器

多轴运动控制器1、运动控制器概述随着现代控制技术的提高,运动控制器的出现在某种意义上满足了新型数控系统的标准化、开放性的要求,为各种工业设备、国防设备以及智能医疗装置的自动化控制系统的研制和改造提供一个统一的硬件平台。
整体而言,运动控制器是一种控制装置,其核心为中央逻辑控制单元,敏感元件一般为传感器,控制对象为电机或动力装置和执行单元。
目前,大多数的运动控制器是一种基于PC机或工业PC机的上位控制单元,多用于控制步进电机或伺服电机,在控制过程中,控制器可以完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等)。
一般地,控制器都配有开放的函数库供用户在DOS或Windows系统平台下自行开发,从而构造所需的控制系统。
图1给出典型的PC+运动控制器组成的开放式控制系统的简图:一般地,运动控制器发送运动控制指令到伺服驱动器,由伺服驱动器驱动伺服电机运行,再通过伺服电机上的编码器反馈信号返回至运动控制器,至此,整个运动控制系统实现运动控制器的闭环控制。
图1 典型的Pc+运动控制器组成的开放式控制系统的2、运动控制器国内外研究现状在20世纪90年代,国际发达国家就已经相继推出运动控制器产品,包括美国Deltatau公司的PMAC多轴运动控制器,英国TRIO公司的PCI208多轴运动控制器以及德国MOVTEC公司开发的DEC4T运动控制器等。
近年来,运动控制器作为一个独立的工业自动化控制类产品,已经被越来越多的工业领域所接受。
目前,由这些发达国家研制的运动控制器已开始在机器人控制、半导体加工、飞行模拟器等新兴行业得到了很大的应用,其在传统的机床控制领域所占的市场份额也在不断的扩大。
我国在运动控制器产品开发方面相对滞后,1999年固高科技有限公司开始开发、生产开放式运动控制器,随后,国内又有其它几家公司进入该领域,但实际上,其大多是在国内推广国外生产的运动控制器产品,真正进行自主开发的公司较少。
WY08MC运动控制器

WY08MC运动控制器使用说明书北京帝特马数控设备公司2008年05月1 概述1.1 简介WY08MC运动控制器为软件型运动控制器,其硬件由单片机和FPGA构成,可以同步控制四个轴,实现多轴协调运动。
它适用于广泛的领域,包括机器人、数控机床、木工机械、印刷机械、装配生产线、电子加工设备以及激光加工设备等。
WY08MC运动控制器以IBM-PC 及其兼容机为主机,采用标准的打印接口连接。
运动控制器提供基于VB6.0开发的ActiveX dll驱动程序,可以实现复杂的控制功能。
用户能够将ActiveX dll提供的控制函数与自己控制系统所需的数据处理、界面显示、用户接口等应用程序模块集成在一起,建造符合特定应用要求的控制系统,以适应各种应用领域的要求。
1.2 基本性能连接方式:标准打印口,地址278H控制周期:4ms模拟量输出:4轴-10V~+10V,自动零偏修正编码器输入:4路4倍频,最高频率2MHZ报警信号输入:每轴1路,光隔限位信号输入:每轴2路,光隔原点信号输入:每轴1路,光隔驱动使能输出:每轴1路,光隔通用IO输入:20路,光隔通用IO输出:32路,光隔插补功能:直线、平面圆弧插补,连续小线段插补,S形加减速运动控制编程方式:标准G代码用户程序缓冲区:一百万行轴控制方式:单轴速度控制、命令行控制、程序控制,可选手轮脉冲控制位置控制算法:前馈+比例控制安全措施:跟随误差限制、位置极限、驱动器报警1.3 电机控制系统组成采用本运动控制器构成的电机控制系统由以下部件组成:1、运动控制器及其接口板、通讯线、电源2、具有标准打印口的IBM-PC或其兼容机3、具有增量式编码器的伺服电机4、伺服电机驱动器及其电源5、24V直流电源,用于IO控制6、限位及原点开关其典型连接如图1-1所示:图1-1 WY08MC控制系统组成示意图其典型应用如图1-2所示:图1-2 WY08MC控制系统典型应用2 快速使用2.1 开箱检查打开包装前,请先查看外包装标明的产品型号是否与订购的产品一致。
IP8000&8100操作说明书CN

调零 弹簧
IN 电流 转矩 电机
固定 节流
喷嘴 挡板
反馈 弹簧
膜片
补偿 弹簧
量程节 调杆
排气 阀芯
凸轮
供气 阀芯
回转角 摆动 OUT 执行器
反馈 轴
图3 IP8100型框图
IP8000型(回转凸轮式)单动正向动作
X向视
停止用螺钉 (不可动)
①先导阀 供气阀芯B
自动/手动切换螺钉 (内置固定节流)
灵敏度调整螺钉(增益调整螺钉)
规格
项目
输入电流 输入电阻 供给空气压 标准行程 灵敏度 直线性 迟滞 重复性 温度系数
输出流量
型号
规格表
杠杆式
单作用
双作用
标准
回转凸轮式
单作用
双作用
允许振角
空气消耗量
环境温度及使用流体温度
防爆构造 空气连接口/压力表连接口 电气配线连接口 配线方法 材质 质量 外皮保护构造
标准品可用于1/2分段量程
动作 输入电流增大时,执行器主轴按顺时针回转。
正
主轴
单作用执行器
主轴
单作用执行器
主轴
双作用执行器
向
动
作
定位器
凸轮DA面
定位器 凸轮DA面
定位器 凸轮DA面
OUT2为堵塞
OUT1为堵塞
动作
输入电流增大时,执行器主轴按逆时针回转。 (让反向动作驱动部作反向动作)
动作
动作
输入电流增大时,执行器主轴按逆时针回转。 输入电流增大时,执行器主轴按逆时针回转。
动作 输入电流增大时,气缸活塞杆沿箭头方向动作。
向
动
作
量程调节杠杆反向位置 OUT1为堵塞
MC800电动机保护控制器使用说明书
M C800系列电动机保护控制器用户手册VER: 2.7目录一.总介................................................................. - 2 -1.1总体概述 (2)1.2功能概述 (2)1.3性能概述 (3)1.4工作环境 (3)1.5符号对照表.........................................................-3–1.6选项表.............................................................-4–二.技术参数............................................................. - 5 -2.1测量 (5)2.2保护 (5)2.3保护技术特性 (6)2.4上电自起动功能 (15)2.5欠压重起动功能 (15)2.6失压重起动功能 (15)三.参数设置及应用...................................................... - 15 -3.1MC800面 (15)3.2端子 (16)3.3MC820显示模块 (16)3.4参数设置及功能应用 (17)附录A .................................................................. - 39 -MODBUS协议简述 (39)通讯应用格式说明 (31)MC800系列通讯地址表 (42)一.总介1.1 总体概述MC800系列电动机管理控制器,是按IEC 国际标准开发的智能化、网络化、数字化低压电动机保护控制器;其改变了传统的电动机保护与控制模式,取代了热继电器,电流互感器,中间继电器,变送器等常规电器元件,在全面实现保护、测量、控制一体化的同时,将先进的网络通讯技术和分布式智能技术溶入MCC 控制中心中;从而为工业生产过程控制提供了科学有效的现场级保护、测控单元。
NX8中央控制器的说明书

al a rm e.c omm et àl ad i sp os i ti o ndup ubl ic , v i aw ww .d oc a l ar m e.c om ,d el ad oc um en t at i on te c h ni q ue do nt l e s réf ére n c e s ,m a r q u e s e tl o g o s , s o n t l a p ro p r i ét é d e s n t e u r s r e s p e c t i f sLa centrale NX8 peut gérer des émetteurs radio grâce aux modules NX408EI, NX416EI, NX448EI.Les émetteurs compatibles sont : NX450I, NX451I,NX470I, NX475I, NX480I et NX490I.Le récepteur radio peut s’installer dans le coffret de la centrale. Le raccordement à la carte mère se fait par un bus 3 fils comprenant l’alimentation et les données.L’installation de la carte réceptrice radio nécessite quelques précautions d’installation :Laisser au moins 30 cm au-dessus de la centrale afin de placer les antennes de la carte de réception radioEviter de placer la carte de réception radio dans un endroit humideEviter les armoires métalliques, armoires électriques, les chaufferies etc...Installation Carte réceptionCe chapitre indique l’installation de la carte, la fixation sur le coffret et l’installation des antennes.ATTENTION : Vérifier que vous n’êtes pas chargéélectriquement. Pour cela, toucher le boîtier métallique ou portez un bracelet anti statique pour éviter toute décharge électro statique1/ Après avoir installé le coffret de la NX8, fixer les vis prévues à cet effet avec l’écrou et les rondelles fournies. L’emplacement des vis doit être conforme àla figure 1.Figure 1 : Installation des vis de fixation2/ Installer le guide sans le fixer complètement grâce àla vis auto taraudeuse fournie. L’emplacement de ce guide doit se situer sous les vis fixées au point 1. Voir Figure 2Figure 2 : Préinstallation du guide de maintien de lacarte de réception radio.al a rm e.c omm et àl ad i sp os i ti o nd up ub l ic , v i aw ww .d oc a l ar m e.c om ,d el ae s p e c t if sNX408I - NX416I - NX448IFigure 3 : Installation de la carte dans le coffret4/ Dès que la carte est installée, vissez la vis auto taraudeuse pour fixer solidement la carte5/ Placer les antennes dans les emplacements prévus àcet effet (Voir Figure 4)Figure 4 : InseFirsions des antennes Figure 4 : insertion des antenness r e s p e c t i f sr e s p e c t i f sNX408I - NX416I - NX448Iu r s r e s p e c t i f sNX408I - NX416I - NX448Iw ww .u r s r e s p e c t i f sNX408I - NX416I - NX448ICAD_NX408EI_416EI_448EI_NI.docVersion 1.0Page 11/11。
西门子伺服电机简明样本2013
西门子提供免费的、功能强大的产品图纸工具软件 CAD-Creator。通过 CAD-Creator 软件可以生成电机及驱动、控制系统的 2 维尺寸 图和 3 维立体示意图。 下载网址 :/download/searchResult.aspx?searchText=cad+creator
依靠完善的产品规格体系、创新的模块化设计和上述的丰富可选项,您可以根据实际使用的需求,选择到犹如定制化的最适合电机 产品。您还可以借助西门子选型工具 Sizer 和图纸工具 CAD-Creator 来进行辅助选择,上述软件均免费使用。
请注意 :并非所电机都覆盖所有上文所述可选项。具体的使用需求可咨询西门子当地销售工程师或使用西门子标准选型大全(PM 21) 来进行更精确的选择。
10.0 15.0 18.0 3.7 5.4 8.0 6.5 6.5 2.6 3.0 4.3 5.0 0.9 2.0
15.0 4.7 6.0 8.7 10.0 1.5
堵转 转矩
M0 Nm
3.0 6.0 8.5 11.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 3.0 6.0 8.5 11.0 8.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 6.0 8.5 11.0 8.0 12.0 16.0 0.18 0.35 0.85 1.15 1.6 1.6 3.0
8100 8000说明书
+10V,50mA,GND
AI1
电压输入信号
JP5 断开/JP3 1-2:-10V~+10V JP5 断开/JP3 2-3:0~10V JP5 短接 0~20mA 内范围可调 o00/o01 设定输入电压/电流范围 o06/o07 设定输入信号对应设定值
2
第一章 检查与安全注意事项
第一章 检查与安全注意事项
第 一
普传变频器在出厂之前均已经过测试和品质检验。购买后,请先检查产品的 章 包装是否因运输不慎而造成损伤;产品的规格、型号是否与订购之机种相符。如 有问题,请联络普传各地经销商或直接与本公司联系。
1-1 拆箱之后检查 ※ 箱内含本机一台、使用说明书一本、保修卡一张。 ※ 请查看变频调速器侧面的铭牌型号,以确定在您手上的产品就是所订购之产
2
第一章 检查与安全注意事项
1-3 使用范围
※ 本变频器仅适用于一般的工业三相交流异步电动机。
第
※ 本变频器只能用在本公司认可的场合,未经认可的使用环境可能导致火灾、 一
触电、爆炸等事件。
章
※ 如果用于因变频器失灵而可能造成人身伤亡的设备时(例如:运输人员的升
降设备、航空系统、安全设备等),必须慎重处理,在这种情况下,请向厂家
出风
出风
空气
150MM
50MM
50MM
47,27
150MM
进风
进风
2-3 配线 变频调速器配线,分为主回路及控制回路两部分。用户必须依照下图所示的
配线回路正确连接。
3
4
2-3-1 PI8000 配线图 1. 11kW~15kW 配线图(8N3)
《XS-M型工业机器人操作与编程》教材
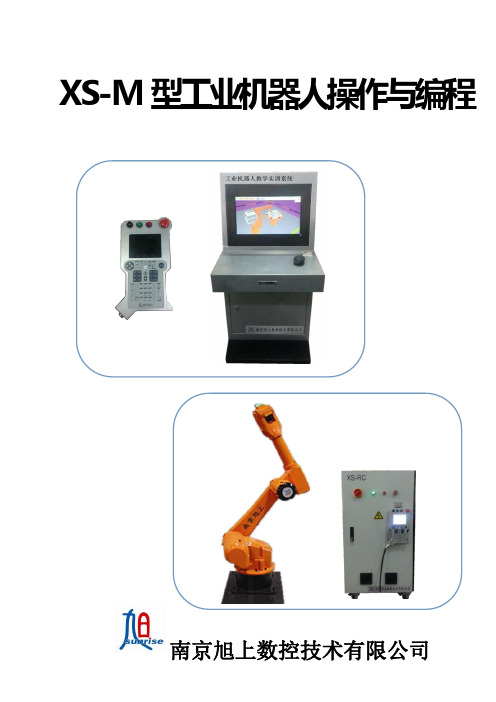
XS-M型工业机器人操作与编程第一章绪论一.工业机器人基础工业机器人的类型、组成、历史及发展趋势机器人的历史并不算长,1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人,机器人的历史才真正开始。
英格伯格在大学攻读伺服理论,这是一种研究运动机构如何才能更好地跟踪控制信号的理论。
德沃尔曾于1946年发明了一种系统,可以“重演”所记录的机器的运动。
1954年,德沃尔又获得可编程机械手专利,这种机械手臂按程序进行工作,可以根据不同的工作需要编制不同的程序,因此具有通用性和灵活性,英格伯格和德沃尔都在研究机器人,认为汽车工业最适于用机器人干活,因为是用重型机器进行工作,生产过程较为固定。
1959年,英格伯格和德沃尔联手制造出第一台工业机器人。
古代机器人机器人一词的出现和世界上第一台工业机器人的问世都是近几十年的事。
然而人们对机器人的幻想与追求却已有3000多年的历史。
人类希望制造一种像人一样的机器,以便代替人类完成各种工作。
西周时期,我国的能工巧匠偃师就研制出了能歌善舞的伶人,这是我国最早记载的机器人。
春秋后期,我国著名的木匠鲁班,在机械方面也是一位发明家,据《墨经》记载,他曾制造过一只木鸟,能在空中飞行“三日不下”,体现了我国劳动人民的聪明智慧。
公元前2世纪,亚历山大时代的古希腊人发明了最原始的机器人——自动机。
它是以水、空气和蒸汽压力为动力的会动的雕像,它可以自己开门,还可以借助蒸汽唱歌。
1800年前的汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车。
计里鼓车每行一里,车上木人击鼓一下,每行十里击钟一下。
后汉三国时期,蜀国丞相诸葛亮成功地创造出了“木牛流马”,并用其运送军粮,支援前方战争。
1662年,日本的竹田近江利用钟表技术发明了自动机器玩偶,并在大阪的道顿堀演出。
1738年,法国天才技师杰·戴·瓦克逊发明了一只机器鸭,它会嘎嘎叫,会游泳和喝水,还会进食和排泄。
瓦克逊的本意是想把生物的功能加以机械化而进行医学上的分析。
Micro800 可编程控制器系列选型指南-zh

Bulletin 2080 选型指南
重要用户须知
固态设备具有与机电设备不同的运行特性。 Safety Guidelines for the Application, Installation and Maintenance of Solid State Controls ( 固态控制设备的 应用、安装与维护安全指南,出版号:SGI-1.1,可向您当地的罗克韦尔自动化销售处索取或通过 / literature 在线索取 ) 描述了固态设备和硬接线机电设备之间的一些重要区别。由于存在这些区别,同时由于固态设备的广 泛应用,负责应用此设备的所有人员都必须确保仅以可接受的方式应用此设备。
有
有
主站 / 从站
有
嵌入式以太网
EtherNet/IP
Modbus TCP
有
有
无
无
有
有
Micro800 控制器模拟量 I/O 和热电偶 / 热电阻比较
属性
Micro810
Micro820
Micro800 ( 带功能性插件 )
Micro850 ( 带扩展 I/O)
性能等级
低
低
中
高
是否与控制器隔离
否
( 提高抗扰度 )
支持的扩展 I/O
—
—
—
所有扩展 I/O 模块 ( 参见第 41 页 )
电源
嵌入式 120/240 V 交流和 12/24 V 直流选件
基本单元内置了 24 V 直流电源,此外还提供可选的外部 120/240V 交流电源
基本指令速度
每个基本指令为 每个基本指令为 0.30 μs 2.5 μs
最小扫描 / 循环时间(3) <0.25 ms
FMS8000型消防控制室图形显示装置操作说明书

三、
3.1 3.2
启动与关闭................................................................................................................................. 7
FMS8000 图形显示装置 ............................................................................................................ 7 个人电脑 .................................................................................................................................... 7
FMS8000 型 消防控制室图形显示装置 操作说明书
FMS8000 型消防控制室图形显示装置操作说明书
目录
一、 概 述 .................................................................................................................................... 1
安 装 .................................................................................................................................... 3
软件要求 .................................................................................................................................... 3 个人电脑硬件最低配置要求 ....................................................................................................... 3 安装过程 .................................................................................................................................... 3 软件狗驱动................................................................................................................................. 6
工业机器人技术3000字自荐书

工业机器人技术3000字自荐书基于DSP运动控制器的5R工业机器人系统设计摘要:以所设计的开放式5R关节型工业机器人为研究对象,分析了该机器人的结构设计。
该机器人采用基于工控PC及DSP运动控制器的分布式控制结构,具有开放性强、运算速度快等特点,对其工作原理进行了详细的说明。
机器人的控制软件采用基于Windows平台下的VC++实现,具有良好的人机交互功能,对各组成模块的作用进行了说明。
所设计的开放式5R 工业机器人系统,具有较好的实用性。
关键词:开放式;关节型;工业机器人;控制软件引言工业机器人技术在现代工业生产自动化领域得到了广泛的应用,也对工程技术人员提出更高的要求,作为机械工程及自动化专业的技术人才迫切需要掌握这一先进技术。
为了能更好地加强技术人员对工业机器人的技能实践与技术掌握,需要开放性强的设备来满足要求。
本文阐述了我们所开发设计的一种5R关节型工业机器人系统,可以作为通用的工业机器人应用于现场,也可作为教学培训设备。
1 5R工业机器人操作机结构设计关节型工业机器人由2个肩关节和1个肘关节进行定位,由2个或3个腕关节进行定向,其中一个肩关节绕铅直轴旋转,另一个肩关节实现俯仰,这两个肩关节轴线正交。
肘关节平行于第二个肩关节轴线。
这种构型的机器人动作灵活、工作空间大,在作业空间内手臂的干涉最小,结构紧凑,占地面积小,关节上相对运动部位容易密封防尘,但运动学复杂、运动学反解困难,控制时计算量大。
在工业用应用是一种通用型机器人¨。
1.1 5R工业机器人操作机结构所设计的5R关节型机器人具有5个自由度,结构简图如图1所示。
5个自由度分别是:肩部旋转关节J1、大臂旋转关节J2、小臂旋转关节J3、手腕仰俯运动关节J4和在旋转运动关节J5。
总体设计思想为:选用伺服电机(带制动器)驱动,通过同步带、轮系等机械机构进行间接传动。
腕关节上设计有装配手爪用法兰,通过不断地更换手爪来实现不同的作业任务。
M8300_M8400系列智能电动执行机构说明书V010801[1]
![M8300_M8400系列智能电动执行机构说明书V010801[1]](https://img.taocdn.com/s3/m/ecf12421aaea998fcc220e35.png)
1
1.6 对环境及能源的影响
本执行机构无有害气体及液体排出,不会污染环境,属高能耗产品。
2 结构特征与工作原理
2.1 总体结构及其工作原理、工作特性
图1 主要部件(剖视图) 执行机构主要由电机、位置传感器、蜗轮、蜗杆、驱动轴、控制单元、就地操作面板、手轮组成。 控制单元接受4~20mA控制信号或开关量并驱动电机转动,电机带动蜗杆,蜗杆再带动蜗轮驱动输 出轴转动,位置传感器检测电机转动的位移量,并送阀位信号给控制板,当控制板检测到位置信号与所 给的控制信号所指定的位置一致时,切断电机电源,由蜗轮、蜗杆的自锁特性使执行机构停止运行。 执行机构是将弱电信号转换为力矩输出的机电一体化产品,工作在S4工作模式。
3 技术特性 ...................................................... 3
3.1主要性能和参数 ....................................................... 3
4 安装、调试 .................................................... 4
500
35
230
F16
2.5 7.3
750
35
230
F16
4.0 11.4
1.4 使用环境条件
根据所装油的种类,环境温度允许在以下范围内使用。 标准型:-25℃~+70℃。 相对湿度: 不大于95%(25°C); 大气压力: 86kPa~106kPa; 周围环境中无起腐蚀作用的介质;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
版权声明 深圳市摩信科技有限公司 保留所有权力
深圳市摩信科技有限公司(以下简称摩信科技)保留在不事先通知的情况下, 修改本手册中的产品和产品规格书的权力。摩信科技不承担由于使用本手册或本 产品不当,所造成直接的、间接的、特殊的、附带的或相因而生的损失或责任。 摩信科技具有对本产品的专利权、版权和其它知识产权。未经授权,不得直接或 者间接地制造、加工使用本产品及其相关部分。
警告:运动中的机器有危险!使用者有责任在机器中设计有效的出错处理和 安全保护机制,摩信科技没有义务或责任对由此造成的附带的或相因而生的损失 负责。
目录
目录
第一章 绪论……………………………………………………………………………………..…(1)
1.1 概述......................................................................................………………………………..(1) 1.2 电机类型简介...............................................................................……………………….…(2)
绪论
第一章 绪 论
1.1 概述
MCT8000F8/8100F8/8200F8系列控制器可以通过ISA/PCI总线或USB接口直接 与PC机相连接,不同型号的控制器连接方式不同。其中,MCT8000F8系列的接口 为ISA总线,MCT8100F8系列为PCI总线,而MCT8200F8是USB接口。由于采用了最 新的DSP和FPGA技术,这些控制器都具有高速通信功能、高频率的编码器计数功 能和低电磁辐射等特点。经过特殊的设计,所有的MCT8000F8/8100F8/8200F8控 制器都能基于主机运行或者脱离主机独立运行。借助于MCT8000F8的软件包,控 制器可以自动选择本地或互联网两种方式运行。有关详细情况可参考 《MCT8000FX/8100FX/8200FX系列运动控制器:软件使用手册》。
产品质量保证书………………………………………………………………………………….(23) 附录 1 MCT8000F8-IO 接口板…………………….……………………………………………(24) 附录 2 应用实例…………………………………………………...……………………………..(28) 附录 3 常见问题解答…………………………………………………...………………………(42) 索引…………………………………………………...………………………………………………(48)
MCT8000F8/8100F8/8200F8控制器可解决复杂的运动控制问题,如点动、点 到点定位、矢量定位、电子齿轮、多轴联动和轮廓控制。控制器的自动加减速功 能消除了运动冲击,从而实现平滑的运动轨迹。为平稳地跟踪复杂轨迹, MCT8000F8/8100F8/8200F8实现了任意直线和圆弧段的连续矢量进给。控制器具 有多轴的电子齿轮功能和主从运动功能。
控制器上有2M的闪存(FLASH)用于非易失性存储,可保存应用程序、系统 参数、数组和底层软件。新版本的底层软件可以在不拔出运动控制器的情况下, 方便地通过主机进行在线升级。另外,也可以选择将底层软件保存在1M的可擦 写只读存储器(EPROM)中。MCT8000F8/8100F8/8200F8可将多至八轴的控制 器集成在一个ISA/PCI/USB卡上。其中MCT8000F2、MCT8000F4二至四轴控制 器集成在一块7.6" x 3.9"卡上;MCT8000F6、MCT8000F8六至八轴控制器集成 在一块8.7" x 3.9"卡上。即将推出的MCT8000F32控制器,32轴集成在一个 ISA/PCI/USB卡上。需要了解详情,请向摩信科技客户服务中心咨询。
1.2.2 输入信号为正弦波换向信号的无刷伺服电机
如何使用本手册
本使用手册提供了正确使用MCT8000F8系列运动控制器的信息。另一本手册, 《MCT8000FX/8100FX/8200FX系列运动控制器:软件使用手册》说明了使用这些 控制器所要用到的命令和函数。
您的运动控制器设计上可用于所有的电机控制系统,如直流伺服、交流伺服 和步进电机控制系统。为满足您的应用要求,必须设定和配置适当的软件环境。 请参照《MCT8000FX/8100FX/8200FX系列运动控制器:软件使用手册》了解详细 情况。
第三章 主机接口……………………………………………………………………….……..…(11) 第四章 数字信号处理芯片 TMS320C31……………………...…………….……….………(12)
4.1 DSP内存映射................................................................................…....………….…………(13) 4.2 片外内存......................................................................………......……………….……...…(14) 4.3 串行接口.............................................................................……………………….………..(15) 4.4 DSP外部中断..............................................................……………………...………………(15)
9.1 概述…………………………………………………………………………..……...….…(22) 9.2 安装…………………………………………………..……………………………………(22) 9.3 通信…………………………………………….………………………………………….(22) 9.4 稳定性………………………………………………………………….………………….(22)
第二章 MCT8000F8/8100F8/8200F8 控制器的安装…………………………………...…(7)
2.1 安装前注意事项...................................................……......................………..……………...(7) 2.2 主机配置要求.....................................……................................…………..…..…………….(7) 2.3 MCT8000F8控制器的设置…………...………............................................…………..…….(8) 2.4 插入MCT8000F8控制板...........................................……………………………………....(10) 2.5 运行自检测程序…………………………………………………………………………....(10)
为与外部事件同步,MCT8000F8/8100F8/8200F8提供了24个可编程的数字输 入,8个数字输出和8个用于模拟传感器、压力变送器等模拟信号输入的通道。 MCT8000F8控制器还提供了特制的光电隔离输入,可用于限位开关、运动取消、 系统归零和其它信号的中断输入。控制器附带的软件包,提供了JAVA环境下功能 强大的应用程序操作界面,可实现PID参数自动调节和自整定,在PC机的屏幕上 显示运动轨迹,编译G指令程序等功能。驱动程序可用于Windows 95/98/NT操作 系统。
MCT8000F8/8100F8/8200F8系列控制器提供两个双端口RAM通信通道,一个通 道用于发送和接收命令,另一个通道用于主机与控制器之间的数据传递。实现了 在程序运行过程中,实时读取控制器运行状态和参数的功能。控制器可实现高速 伺服控制,编码器计数频率高达17MHz,步进电机每轴的最高脉冲频率均可达到 2.0MHz,每轴的伺服刷新周期为10µs。
1.2.1 输入信号为+/-10V的标准伺服电机...........................…………………………...….(2) 1.2.2 输入信号为正弦波换向信号的无刷伺服电机.......……………...…………………(2) 1.2.3 输入信号为脉冲和方向信号的步进电机.......................…………………………...(2) 1.3 系统组成……………………………………………………………………………………(3) 1.3.1 电机..........................……………………………………………………….………...(3) 1.3.2 放大器.........................…………………………………………………………..…...(3) 1.3.3 编码器......................………………………………………………………..………..(4) 1.4 系统结构简介…………………………………………………………….……….………..(5) 1.5 应用…………………………………………………………………………….…………...(6)
第六章 JTAG 接口……………………………………………………………..…………………(17) 第七章 接线端子的分布……………………………………………………………...……….(18) 第八章 MCT8000F8 控制器技术规格书………………………………………….…………(21) 第九章 故障诊断………………………………………………………..……………………….(22)
第五章 输入/输出子系统……………………………………………..……………………….(16)
5.1 模数转换…………………………………………………………………...…..…………...(16) 5.2 数模转换……………………………………………………………….………...…………(16) 5.3 数字 I/O 口……………………………………………………………….………………….(16) 5.4 编码器接口………………………………………………………………………………....(16)