PID程序例子
PID算法程序范文

PID算法程序范文PID控制器是一种常用的反馈控制算法,用于实时地调整控制系统的输出,以使得被控对象的输出尽可能接近设定值。
PID控制器由比例项(P)、积分项(I)和微分项(D)组成,通过对这三个项的调节,可以实现对被控对象的精确控制。
下面是一个简单的PID算法程序的示例,使用C语言编写:```c#include <stdio.h>//定义PID参数#define KP 0.5 // 比例增益#define KI 0.2 // 积分增益#define KD 0.1 // 微分增益//定义全局变量int error = 0; // 当前误差int last_error = 0; // 上一次误差int integral = 0; // 积分项int derivative = 0; // 微分项int output = 0; // 控制器输出//定义被控对象模拟函数int simulate_plant(int control_input)static int actual_output = 0; // 被控对象的输出actual_output += control_input; // 模拟被控对象的响应return actual_output;//PID算法函数int pid_algorithm(int setpoint, int actual_output)error = setpoint - actual_output; // 计算当前误差//计算比例项int proportional = KP * error;//计算积分项integral = integral + error;int integral_term = KI * integral;//计算微分项derivative = error - last_error;int derivative_term = KD * derivative;//计算PID控制器的输出output = proportional + integral_term + derivative_term; //更新上一次误差供下一次计算使用last_error = error;return output;int mai//设置目标值和初始被控对象输出值int setpoint = 50;int actual_output = 0;//模拟实时控制过程,循环100次for (int i = 0; i < 100; ++i)//调用PID算法计算控制器输出int control_input = pid_algorithm(setpoint, actual_output);//更新被控对象的输出actual_output = simulate_plant(control_input);//输出当前相关变量值供调试printf("Error: %d, Control Input: %d, Actual Output: %d\n", error, control_input, actual_output);}return 0;```上述代码中,`KP`、`KI`和`KD`分别表示比例增益、积分增益和微分增益,根据实际控制系统的需求进行调节。
计算机控制系统_PID_带例子
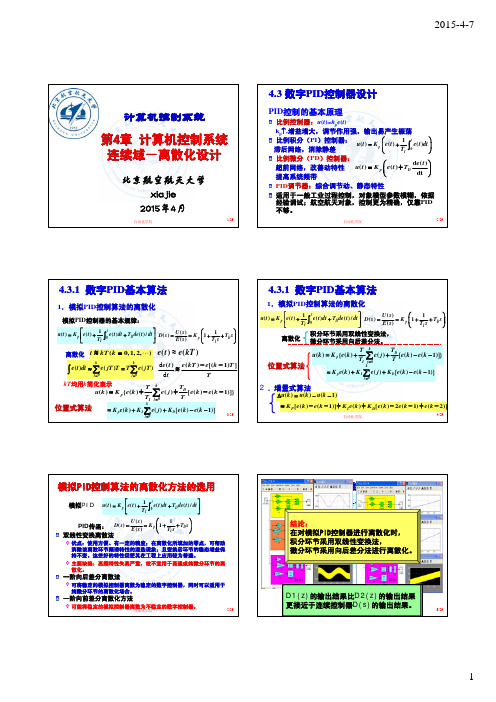
图4-29 自动与手动无扰转换 系统处于自动状态时
U (z) 1
Kp
z 1 1 (1 ) z 1
lim
T 0 z 1
E ( z ) K p 1 E(z) z 1
1
稳态时有
控制度=
0 0
[e 2 (t )dt ]DDC [e 2 (t )dt ]模拟
自动化学院
14/29
模拟PID参数确定法——稳定边界法
参见《过程计算机控制》王锦标,清华出版社
2.扩充阶跃响应曲线法
整定T和KP、TI、TD的步骤如下: ①数字控制器不接入系统,将被控对象的被控制量调到 给定值附近,并使其稳定下来,然后测出对象的单位 阶跃响应曲线 。 ②在对象响应曲线的拐点处作一切线,求出纯滞后时间 τ和时间常数Tm以及它们的比值Tm/τ 。 ③选择控制度 ④查表4-2,即可求得数字控制器的KP、TI、TD及采样周 期T。
(2)若稳态误差不能满足设计要求,则需加入积分控制。 整定时先置积分时间TI为一较大值,并将经第1步整定 得到的KP减小些,然后减小TI ,并使系统在保持良好 动态响应的情况下,消除稳态误差。这种调整可根据 响应曲线的状态,反复改变KP及TI ,以期得到满意的 控制过程。 (3)若使用PI调节器消除了稳态误差,但动态过程仍不能 满意,则可加入微分环节。在第2步整定的基础上,逐 步增大TD,同时相应地改变KP和TI,逐步试凑以获得 满意的调节效果。 17/29
U ( s)
1
离散法1:积分用双线性法,微分用向后差分法。 结论: z 1 z 1 D1( z ) 300 0.00025 200000 在对模拟PID控制器进行离散化时, z 1 z 积分环节采用双线性变换法, 离散法2:积分和微分均采用双线性变换法。 微分环节采用向后差分法进行离散化。
pid示例代码
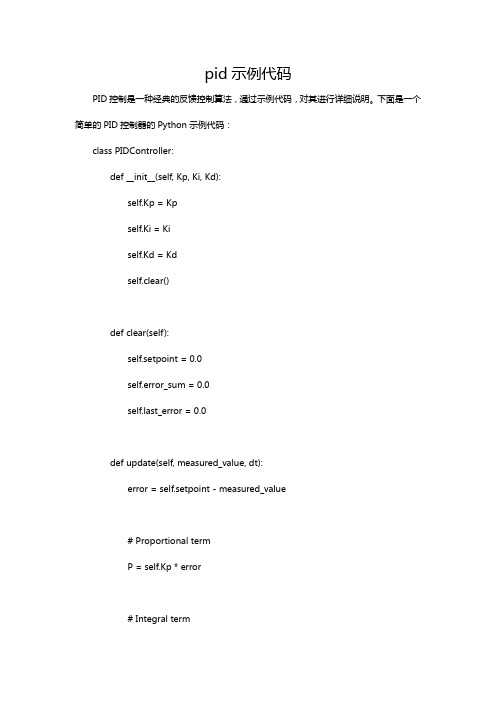
pid示例代码PID控制是一种经典的反馈控制算法,通过示例代码,对其进行详细说明。
下面是一个简单的PID控制器的Python示例代码:class PIDController:def __init__(self, Kp, Ki, Kd):self.Kp = Kpself.Ki = Kiself.Kd = Kdself.clear()def clear(self):self.setpoint = 0.0self.error_sum = 0.0st_error = 0.0def update(self, measured_value, dt):error = self.setpoint - measured_value# Proportional termP = self.Kp * error# Integral termself.error_sum += error * dtI = self.Ki * self.error_sum# Derivative termderivative = (error - st_error) / dtD = self.Kd * derivative# Calculate the outputoutput = P + I + D# Save the current error for the next iterationst_error = errorreturn output接下来详细解释这段代码的各个部分:1.__init__(self, Kp, Ki, Kd):初始化方法,用于设置PID控制器的比例系数Kp、积分系数Ki和微分系数Kd。
2.clear(self):清除方法,将PID控制器的设置点(setpoint)、累积误差(error_sum)和上一次误差(last_error)重置为初始值。
3.update(self, measured_value, dt):更新方法,用于根据当前测量值和时间间隔来计算PID控制器的输出。
超级经典的且通俗易懂的PID例子
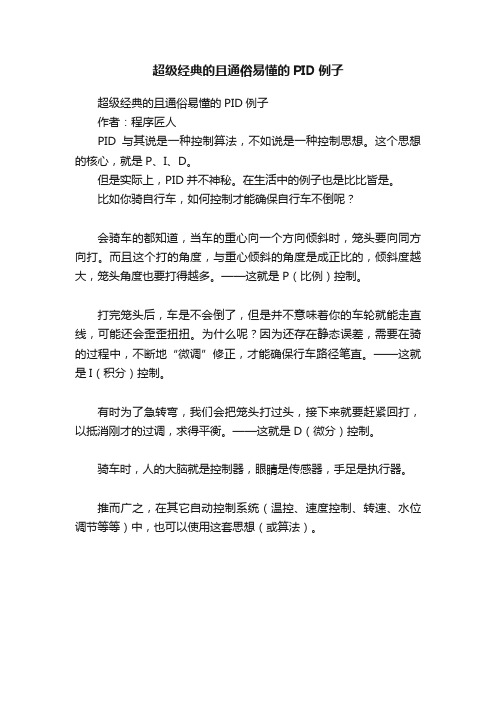
超级经典的且通俗易懂的PID例子
超级经典的且通俗易懂的PID例子
作者:程序匠人
PID与其说是一种控制算法,不如说是一种控制思想。
这个思想的核心,就是P、I、D。
但是实际上,PID并不神秘。
在生活中的例子也是比比皆是。
比如你骑自行车,如何控制才能确保自行车不倒呢?
会骑车的都知道,当车的重心向一个方向倾斜时,笼头要向同方向打。
而且这个打的角度,与重心倾斜的角度是成正比的,倾斜度越大,笼头角度也要打得越多。
——这就是P(比例)控制。
打完笼头后,车是不会倒了,但是并不意味着你的车轮就能走直线,可能还会歪歪扭扭。
为什么呢?因为还存在静态误差,需要在骑的过程中,不断地“微调”修正,才能确保行车路径笔直。
——这就是I(积分)控制。
有时为了急转弯,我们会把笼头打过头,接下来就要赶紧回打,以抵消刚才的过调,求得平衡。
——这就是D(微分)控制。
骑车时,人的大脑就是控制器,眼睛是传感器,手足是执行器。
推而广之,在其它自动控制系统(温控、速度控制、转速、水位调节等等)中,也可以使用这套思想(或算法)。
pid控制原理详解及实例说明

pid控制原理详解及实例说明PID控制是一种常见的控制系统,它通过比例、积分和微分三个控制参数来实现对系统的控制。
在工业自动化等领域,PID控制被广泛应用,本文将详细介绍PID控制的原理,并通过实例说明其应用。
1. PID控制原理。
PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的控制器。
比例部分的作用是根据偏差的大小来调节控制量,积分部分的作用是根据偏差的累积值来调节控制量,微分部分的作用是根据偏差的变化率来调节控制量。
PID控制器的输出可以表示为:\[ u(t) = K_p e(t) + K_i \int_{0}^{t} e(\tau) d\tau + K_d \frac{de(t)}{dt} \]其中,\(u(t)\)为控制量,\(e(t)\)为偏差,\(K_p\)、\(K_i\)、\(K_d\)分别为比例、积分、微分系数。
比例控制项主要用来减小静差,积分控制项主要用来消除稳态误差,微分控制项主要用来改善系统的动态性能。
通过合理地调节这三个参数,可以实现对系统的精确控制。
2. PID控制实例说明。
为了更好地理解PID控制的原理,我们以温度控制系统为例进行说明。
假设有一个加热器和一个温度传感器组成的温度控制系统,我们希望通过PID 控制器来控制加热器的功率,使得系统的温度稳定在设定的目标温度。
首先,我们需要对系统进行建模,得到系统的传递函数。
然后,根据系统的动态特性和稳态特性来确定PID控制器的参数。
接下来,我们可以通过实验来调节PID控制器的参数,使系统的实际响应与期望的响应尽可能接近。
在实际应用中,我们可以通过调节比例、积分、微分参数来实现对系统的精确控制。
比如,增大比例参数可以加快系统的响应速度,增大积分参数可以减小稳态误差,增大微分参数可以改善系统的动态性能。
通过不断地调节PID控制器的参数,我们可以使系统的温度稳定在设定的目标温度,从而实现对温度的精确控制。
总结。
通过本文的介绍,我们可以了解到PID控制的原理及其在实际系统中的应用。
pid实际使用案例介绍

pid实际使用案例介绍
PID控制器在工业自动化中有广泛的应用。
以下是一些实际使用案例的介绍:
1. 温度控制:在许多加热或冷却过程中,需要通过PID控制器来维持稳定的温度。
例如,工业炉炉温控制、恒温水槽控制等。
2. 压力控制:在一些流体系统中,需要通过PID控制器来维持稳定的压力。
例如,蒸汽锅炉的压力控制、液体供应系统的压力控制等。
3. 流量控制:在一些工艺过程中,需要通过PID控制器来维持稳定的流量。
例如,化工生产中的液体流量控制、风机的风量控制等。
4. 位置控制:在许多机械系统中,需要通过PID控制器来实现位置控制。
例如,机械臂的位置控制、电梯的楼层控制等。
5. 转速控制:在一些旋转设备中,需要通过PID控制器来控制转速。
例如,电机的转速控制、风力发电机组的转速控制等。
这些都是仅仅是一些常见的应用案例,PID控制器在各种工业自动化领域都有广泛的应用。
通过PID控制器,可以实现对各种参数的精确控制,提高工业生产过程的稳定性和效率。
pid控制原理详解及实例说明

pid控制原理详解及实例说明PID控制是一种经典的控制算法,适用于很多控制系统中。
它通过对误差进行反馈调整,以实现系统稳定和快速响应的目标。
PID控制包含三个部分,即比例(Proportional)、积分(Integral)和微分(Derivative)控制。
比例控制(P)是根据误差的大小来调整控制输出的大小。
当误差较大时,控制输出也会相应增加;而当误差较小时,控制输出减小。
比例系数Kp用于调节比例作用的强弱。
积分控制(I)是根据误差的累积值来调整控制输出的大小。
它主要用于消除稳态误差。
积分系数Ki用于调节积分作用的强弱。
微分控制(D)是根据误差的变化率来调整控制输出的大小。
它主要用于快速响应系统的变化。
微分系数Kd用于调节微分作用的强弱。
PID控制的输出值计算公式为:Output = Kp * Error + Ki * Integral(Error) + Kd * Derivative(Error)下面举一个温度控制的例子来解释PID控制的应用。
假设有一个温度控制系统,希望将温度维持在设定值Tset。
系统中有一个可以控制加热器功率的变量,设为u。
温度传感器可以实时测量当前温度T,误差为Error = Tset - T。
比例控制(P):根据误差值来调整加热器功率,公式为u =Kp * Error。
当温度偏低时,加热器功率增加;当温度偏高时,加热器功率减小。
积分控制(I):根据误差的累积值来调整加热器功率,公式为u = Ki * ∫(Error)。
当温度持续偏离设定值时,积分控制会逐渐累积误差,并调整加热器功率,以消除误差。
微分控制(D):根据误差的变化率来调整加热器功率,公式为u = Kd * d(Error)/dt。
当温度变化率较大时,微分控制会对加热器功率进行快速调整,以避免温度过冲。
这样,通过比例、积分和微分控制的组合,可以实现温度控制系统对设定温度的稳定和快速响应。
总结起来,PID控制通过比例、积分和微分控制,根据误差的大小、累积值和变化率来调整控制输出,使系统能够稳定地达到设定目标。
pid控制应用实例

pid控制应用实例PID (Proportional Integral Derivative)控制是一种常用的控制算法,被广泛应用于工业自动化和过程控制领域。
PID控制是一种反馈控制方法,通过对系统的输出进行实时监测,并根据误差的大小调整系统的输入,以使系统的输出尽量接近期望值。
在实际应用中,PID控制常被用于控制温度、压力、流量等物理量。
下面以一个温度控制的实例来说明PID控制的应用。
假设我们有一个加热系统,需要将系统的温度维持在一个特定的设定值。
该系统由一个加热器和一个温度传感器组成。
加热器通过调节电流的大小来控制加热功率,而温度传感器则测量系统的温度。
我们需要确定一个目标温度,即设定值。
假设我们的目标温度是60摄氏度。
接下来,我们需要将目标温度与当前温度进行比较,以确定误差。
当前温度可以通过温度传感器获取。
如果当前温度与目标温度相差较大,说明系统需要进行调整。
PID控制算法根据误差的大小来调整加热功率。
具体来说,PID控制算法由三个部分组成:比例控制、积分控制和微分控制。
比例控制是根据误差的大小来调整控制量的大小。
误差越大,控制量的调整幅度越大。
比例控制可以快速地将系统的温度接近设定值,但可能会导致系统的超调。
积分控制是根据误差的积分来调整控制量的大小。
如果系统的温度一直与设定值有偏差,积分控制将持续地增加控制量,以减小偏差。
积分控制可以消除系统的静态误差,但可能会导致系统的超调和震荡。
微分控制是根据误差的变化率来调整控制量的大小。
如果系统的温度变化较快,微分控制将增加控制量以抑制温度的快速变化。
微分控制可以提高系统的稳定性,但可能会导致控制量的突变。
将比例控制、积分控制和微分控制结合起来,就形成了PID控制算法。
通过不断地调整加热功率,系统的温度将逐渐接近目标温度,并在一定的范围内保持稳定。
在实际应用中,PID控制算法的参数需要经过调试和优化。
比例系数、积分系数和微分系数的选择将影响系统的响应速度、稳定性和抗干扰性能。
模糊pid控制实例
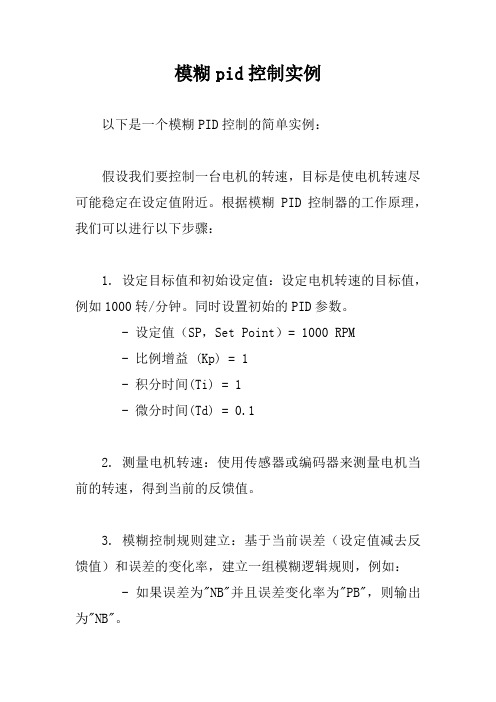
模糊pid控制实例以下是一个模糊PID控制的简单实例:假设我们要控制一台电机的转速,目标是使电机转速尽可能稳定在设定值附近。
根据模糊PID控制器的工作原理,我们可以进行以下步骤:1. 设定目标值和初始设定值:设定电机转速的目标值,例如1000转/分钟。
同时设置初始的PID参数。
- 设定值(SP,Set Point)= 1000 RPM- 比例增益 (Kp) = 1- 积分时间(Ti) = 1- 微分时间(Td) = 0.12. 测量电机转速:使用传感器或编码器来测量电机当前的转速,得到当前的反馈值。
3. 模糊控制规则建立:基于当前误差(设定值减去反馈值)和误差的变化率,建立一组模糊逻辑规则,例如: - 如果误差为"NB"并且误差变化率为"PB",则输出为"NB"。
- 如果误差为"NB"并且误差变化率为"NM",则输出为"NM"。
- ...4. 模糊推理和模糊输出:根据模糊逻辑规则,进行模糊推理,即将当前的误差和误差变化率映射到模糊输出的隶属度值上。
5. 解模糊:将模糊输出映射回具体的控制量,例如根据模糊输出计算PID控制器的输出量。
6. 更新PID参数:根据误差的变化和模糊输出的结果来更新PID控制器的参数,例如根据误差的大小和变化率来调整PID参数,以使控制更加精确。
7. 反馈控制:将PID控制器的输出量应用于电机,调整电机的转速。
8. 循环控制:循环执行上述步骤,不断更新PID参数和反馈控制,使得电机转速尽可能稳定在设定值附近。
需要注意的是,以上是一个简单的示例,实际的模糊PID控制根据具体的应用情况和系统特点会有所差异。
参数的选择和模糊规则的建立都需要根据具体的控制对象进行优化和调整。
此外,在实际应用中,还需要考虑到系统的鲁棒性、性能指标等因素。
最全PID控制算法的C语言实现
最全PID控制算法的C语言实现PID控制算法是一种在控制系统中常用的反馈控制算法,用于根据实际测量值来调节输出来实现对系统状态的控制。
PID算法包含三个控制参数:比例常数(Kp)、积分常数(Ki)和微分常数(Kd)。
这三个参数分别调节了比例控制、积分控制和微分控制的比例,用于实现不同的控制效果。
下面是一个最全的PID控制算法的C语言实现示例:```c#include <stdio.h>//定义PID控制算法的参数float Kp = 1.0; // 比例常数float Ki = 0.5; // 积分常数float Kd = 0.2; // 微分常数//定义全局变量用于记录控制过程中的误差与累积误差float error = 0.0;float lastError = 0.0;float integral = 0.0;//定义PID控制函数float pidControl(float target, float current, float dt)//计算误差error = target - current;//计算累积误差integral += error * dt;//计算微分误差float derivative = (error - lastError) / dt;//计算PID输出float output = Kp * error + Ki * integral + Kd * derivative; //更新上一次误差lastError = error;return output;int mai//模拟控制过程float target = 100.0; // 目标值float current = 0.0; // 当前值float dt = 0.1; // 控制周期for(int i = 0; i < 100; i++)//调用PID控制函数float output = pidControl(target, current, dt);//更新当前值,模拟实际过程中的测量误差current += output * dt + 0.2;printf("Target: %.2f, Current: %.2f, Output: %.2f\n", target, current, output);}return 0;```上述代码通过定义全局变量来记录控制过程中的误差与累积误差,并在PID控制函数中进行计算和更新。
PID控制原理详解及实例说明
PID控制原理详解及实例说明PID控制是一种常用的控制算法,它能够在工业控制系统中实现对各种参数的精确控制。
PID分别代表比例(proportional)、积分(integral)和微分(derivative),这三个参数共同决定了控制系统的输出。
在本文中,我们将详细介绍PID控制的原理,并通过一个实例来说明PID控制的应用。
**PID控制原理**PID控制算法的基本原理是通过反馈来调节控制系统的输出值,使其与期望值尽可能接近。
PID控制器根据当前的误差值(e),积分项(i)和微分项(d)来计算控制输出(u)。
具体来说,控制输出可以表示为以下公式:\[ u(t)=K_p \cdote(t)+K_i\cdot\int{e(t)dt}+K_d\cdot\frac{de(t)}{dt} \]其中,\(K_p\)、\(K_i\)和\(K_d\)分别是比例增益、积分增益和微分增益。
比例项用于根据误差信号的大小来调整输出,积分项用于修正系统的静态误差,微分项用于预测误差的变化趋势。
通过调节这三个参数的数值,可以使PID控制器在不同的控制情况下获得最佳性能。
**实例说明**为了更好地理解PID控制的应用,我们以一个简单的温度控制系统为例进行说明。
假设我们需要设计一个PID控制器来维持一个恒定的温度值,控制系统的输入是一个加热元件的功率,输出是系统的温度。
首先,我们需要建立一个数学模型来描述系统的动态特性。
假设系统的温度动态可以由以下微分方程描述:\[ \tau \cdot \frac{dT(t)}{dt}+T(t)=K \cdot P(t) \]其中,\(T(t)\)代表系统的温度,\(P(t)\)代表加热元件的功率,\(\tau\)代表系统的时间常数,\(K\)代表系统的传递函数。
接下来,我们可以根据这个数学模型来设计PID控制器。
首先,我们需要对系统进行参数调试,确定合适的比例增益\(K_p\)、积分增益\(K_i\)和微分增益\(K_d\)。
PID算法通俗讲解
总所周知,PID算法就是个很经典得东西。
而做自平衡小车,飞行器PID 就是一个必须翻过得坎。
因此本节我们来好好讲解一下PID,根据我在学习中得体会,力求通俗易懂。
并举出PID得形象例子来帮助理解PID。
一、首先介绍一下PID名字得由来:P:Proportion(比例),就就是输入偏差乘以一个常数。
I :Integral(积分),就就是对输入偏差进行积分运算。
D:Derivative(微分),对输入偏差进行微分运算。
注:输入偏差=读出得被控制对象得值-设定值。
比如说我要把温度控制在26度,但就是现在我从温度传感器上读出温度为28度。
则这个26度就就是”设定值“,28度就就是“读出得被控制对象得值”。
然后来瞧一下,这三个元素对PID算法得作用,了解一下即可,不懂不用勉强。
P,打个比方,如果现在得输出就是1,目标输出就是100,那么P得作用就是以最快得速度达到100,把P理解为一个系数即可;而I呢?大家学过高数得,0得积分才能就是一个常数,I就就是使误差为0而起调与作用;D 呢?大家都知道微分就是求导数,导数代表切线就是吧,切线得方向就就是最快到至高点得方向。
这样理解,最快获得最优解,那么微分就就是加快调节过程得作用了。
二、然后要知道PID算法具体分两种:一种就是位置式得,一种就是增量式得。
在小车里一般用增量式,为什么呢?位置式PID得输出与过去得所有状态有关,计算时要对e(每一次得控制误差)进行累加,这个计算量非常大,而明显没有必要。
而且小车得PID控制器得输出并不就是绝对数值,而就是一个△,代表增多少,减多少。
换句话说,通过增量PID算法,每次输出就是PWM要增加多少或者减小多少,而不就是PWM得实际值。
所以明白增量式PID就行了。
三、接着讲PID参数得整定,也就就是PID公式中,那几个常数系数Kp,Ti,Td等就是怎么被确定下来然后带入PID算法中得。
如果要运用PID,则PID参数就是必须由自己调出来适合自己得项目得。
PID控制原理详解及实例说明

PID控制原理详解及实例说明PID控制是一种常用的控制算法,它通过测量系统的状态与设定值之间的差异,利用比例、积分和微分三个控制参数来调节系统的控制量,使其尽量接近设定值。
PID控制器通过不断调整这三个参数,可以在稳态误差小的情况下快速、平稳地将系统控制到设定值。
PID控制器的输出由三个部分组成:比例项、积分项和微分项。
比例项是测量误差与设定值之间的比例关系,调整比例参数可以控制系统的敏感程度;积分项是历史误差的积累,调整积分参数可以消除稳态误差;微分项是测量误差的变化率,调整微分参数可以增强系统的稳定性。
PID控制器的输出可以用以下公式表示:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,u(t)是控制器的输出,e(t)是测量误差,Kp、Ki和Kd是分别对应比例、积分和微分参数。
接下来以一个温度控制系统为例说明PID控制的原理:假设有一个恒温箱,我们希望将箱内的温度控制在一个设定值。
首先,我们需要测量箱内的温度和设定值之间的差异,即测量误差。
然后,根据测量误差的大小,我们可以调整控制器的输出,通过增加或减少加热器的功率,使温度接近设定值。
在PID控制中,我们可以通过调节比例参数Kp来控制系统的灵敏度。
增大Kp可以使系统对误差更敏感,但过大的Kp可能导致系统震荡。
当温度误差较大时,控制器会输出较大的功率,加热箱内的温度快速升高;当温度接近设定值时,控制器会输出较小的功率,使温度稳定在设定值附近。
积分参数Ki用于消除稳态误差。
如果系统存在稳态误差,说明温度无法完全达到设定值,可能是由于传感器或加热器的不精确性引起的。
通过调节Ki的大小,积分项可以自动调整系统的控制量,消除稳态误差。
微分参数Kd用于增强系统的稳定性。
如果系统的温度变化率很大,说明加热或冷却过程不够平稳。
通过调节Kd的大小,微分项可以抑制温度的剧烈波动,使系统更加稳定。
综上所述,PID控制器通过比例、积分和微分三个参数的调节,可以实现快速、平稳地将系统控制到设定值。
pid控制温度实例 c语言

pid控制温度实例 c语言以下是一个简单的PID温度控制器的C语言实现示例:```c#include <stdio.h>// PID参数结构体typedef struct {double Kp; // 比例系数double Ki; // 积分系数double Kd; // 微分系数double integral; // 积分项double pre_error; // 上一次误差} PID_t;// PID温度控制器函数double pid_temperature_control(PID_t *pid, double setpoint, double actual_temperature) {double error = setpoint - actual_temperature; // 计算误差pid->integral += error; // 计算积分项double derivative = error - pid->pre_error; // 计算微分项double output = pid->Kp * error + pid->Ki * pid->integral + pid->Kd * derivative; // 计算输出值pid->pre_error = error; // 保存上一次误差值return output;}int main() {PID_t pid = {1.0, 0.5, 0.1, 0.0, 0.0}; // PID参数初始化 double setpoint = 100.0; // 设定温度值double actual_temperature = 0.0; // 实际温度值double output = 0.0; // 输出值int i;for (i = 0; i < 100; i++) { // 模拟控制过程,迭代100次 output = pid_temperature_control(&pid, setpoint, actual_temperature); // 计算输出值printf("Time: %d, Setpoint: %f, ActualTemperature: %f, Output: %f\n", i, setpoint,actual_temperature, output); // 输出结果actual_temperature += output * 0.1; // 根据输出值调整实际温度值,模拟控制过程}return 0;}```在上面的示例中,我们首先定义了一个PID参数结构体,其中包含了比例系数、积分系数、微分系数、积分项和上一次误差等参数。
第6章 PID例子

4
•
小明终于喘了一口,但任务的要求突然严了,水位控制的及时性要求大大提高,一旦 水位过高,必须立即将阀门开大,水降到到要求位置,而且不能低太多,反之亦然。 否则不给工钱。小明又为难了!于是他又开动脑筋,终于想到一个办法:通过观察水 面的变化,发现开大阀门后,大约10分钟后水面才开始下降,于是他就不再等到水面 低于要求之后才关阀门,而在第一次发现水面开始下降后就提前关闭阀门,经过一段 时间,小明总结出了一套水面变化速度与提前动作时间之间的一个关系,这个变化速 度与时间的关系就称为“微分时间”——D。
由于前方没有车辆,采用速度控制的方法进行控制, 使自车平稳地达到并保持巡航速度。仿真结果见图所示。
图13 仿真实验一:速度、时间响应曲线
20
自车以 vc 18m / s 速度行驶,突然前方一速度为 v p 20m / s 的车拐入本车道,两车实际距离 d r 25m。
在该种工况下,纵向控制系统检测到同一车道 的前方车辆
5
例1、汽车纵向闭环控制系统
对汽车模型进行了简化,得到了一个近似的线性系统, 其传递函数为 C ( s) 10 G( s) R( s) s 2 1.6s 1
6
⑴闭环控制系统: 速度闭环系统 控制逻辑实现切换 距离闭环系统(小于安全距离) 距离速度闭环系统 ⑵主要针对高速公路的交通环境 高速行驶的车辆速度调节 节气门(油门)控制器 复杂交通环境停-走 节气门(油门)控制器和制动器
汽车安全辅助驾驶系统的PID控制
智能交通运输系统 (Intelligent Transportation Systems,ITS)
利用现代信息技术、传感技术来扩展驾驶人员的感知能力, 将感知技术获取的外界信息(车速,其它障碍物距离等)传递给 驾驶人员,同时在路况与车况的综合信息中识别是否构成安全隐 患,在不安全情况下,自动采取措施控制汽车,使汽车能主动避 开危险,保障汽车安全。 三大安全辅助驾驶系统: 1.车辆避撞报警(Collision Warning,CW)下面的例子 2.具有避撞功能的车辆自适应巡航控制系统 (Adaptive Cruise Control,ACC) 3.交通环境的车辆智能控制系统(ACC+Stop and Go)
pid控制的原理及应用实例

PID控制的原理及应用实例1. 简介PID控制是一种常见的闭环控制方法,其用于实现对系统稳定性、精确性和鲁棒性的控制。
PID控制器是由比例、积分和微分三个部分组成的,并根据系统的误差、积分和微分项来对系统进行调整。
本文将介绍PID控制的原理,并给出几个应用实例。
2. PID控制的原理PID控制的原理在于通过比例、积分和微分三个部分对系统进行调节。
2.1 比例控制比例控制是根据系统的误差来进行控制的。
误差是指期望值与实际值之间的差异。
比例控制器通过计算误差与比例系数的乘积,使得控制器的输出与误差成正比。
比例控制可以使系统快速响应,但对于稳定性和超调量控制不足。
2.2 积分控制积分控制是根据系统误差的积分来进行控制的。
积分控制器将误差的累积值与积分系数的乘积添加到控制器的输出中。
积分控制可以通过减小误差累积来减小稳态误差,但会增加响应时间。
2.3 微分控制微分控制是根据系统误差的变化率来进行控制的。
微分控制器将误差变化率与微分系数的乘积添加到控制器的输出中。
微分控制可以改善系统的响应速度和稳定性,但对于噪声敏感。
2.4 PID控制PID控制器将比例、积分和微分控制器结合起来,用于调节系统。
PID控制器的输出是通过将比例、积分和微分控制器的输出相加得到的。
PID控制可以在提供系统稳定性的同时,减小超调量和减小稳态误差。
3. PID控制的应用实例以下是几个PID控制在实际应用中的实例:3.1 温度控制在加热过程中,我们需要使温度尽快达到设定值,并保持在设定值附近。
PID 控制可以根据当前温度和设定值之间的差异,调整加热器的功率。
通过合适的参数设置,PID控制可以实现快速稳定的温度控制。
3.2 机器人运动控制PID控制也可用于机器人的运动控制。
例如,在一辆自动驾驶车辆中,PID控制可以根据当前位置和目标位置之间的差异来控制车辆的转向和速度。
通过不断调整输出,车辆可以准确地达到目标位置。
3.3 液位控制在液体处理系统中,PID控制可以用于控制液位。
pid 简单的example code

pid 简单的example code当然,我可以给你一个简单的Python代码示例,用于演示PID(比例-积分-微分)控制器的功能。
PID控制器是一种常用的闭环控制系统,广泛应用于各种工程应用中,如温度控制、速度控制等。
下面是一个简单的Python示例,模拟了一个PID控制器如何控制一个虚拟系统的输出。
在这个例子中,我们将创建一个简单的PID控制器,用于调整一个假设系统的输出,使其尽可能接近设定的目标值。
pythonclass PIDController:def __init__(self, kp=1.0, ki=0.0, kd=0.0, setpoint=0.0):self.kp = kp # 比例系数self.ki = ki # 积分系数self.kd = kd # 微分系数self.setpoint = setpoint # 设定目标值st_error = 0.0 # 上一次的误差self.integral = 0.0 # 误差的积分def update(self, current_value, dt):# 计算当前误差error = self.setpoint - current_value# 计算PID控制输出p_out = self.kp * errorself.integral += error * dti_out = self.ki * self.integrald_out = self.kd * (error - st_error) / dt# 更新误差值st_error = error# 返回PID控制输出return p_out + i_out + d_out# 假设的系统模型def system_model(input_value):# 这个模型仅用于演示,你可以替换成任何你需要的系统模型return input_value * 0.5# 模拟PID控制过程if __name__ == "__main__":pid = PIDController(kp=2.0, ki=0.5, kd=0.1, setpoint=10.0)current_value = 0.0 # 当前系统输出值dt = 0.1 # 时间步长for i in range(100):# 计算PID控制输出control_output = pid.update(current_value, dt)# 应用控制输出到系统模型current_value = system_model(control_output)# 打印当前系统输出值print(f"Step {i+1}: Current Value = {current_value}")print("PID control simulation complete.")这个示例代码创建了一个PIDController类,该类具有一个update方法,用于计算PID控制器的输出。
PID的应用案例

参数 过程变量当前值
PVn 给定值SPn
输出值Mn
数值 水位检测计提供的模拟量经A/D转换后的标准化数值0.0-1.0间
0.7
0.0-1.0间
PID回路的输出值(标准化数值)0.0-1.0间
VD112
增益Kc
VD116
采样时间Ts
VD120
积分时间Ti
VD124 VD128 VD132
微分时间Td
上一次积分值Mx
LD I0.0 PID VB100, 0 //PID指令设置参数表起始地址为VB100,
LD SM0.0 MOVR VD108, AC0 // 将PID回路输出移至累加器 *R 32000.0, AC0 // 实际化数值 ROUND AC0, AC0 // 将实际化后的数值取整 DTI AC0, AC0 // 将双整数转换为整数 MOVW AC0, AQW0 // 将数值写入模拟输出
恒压供水 PID控制参数表
地址
参数
VD100 过程变量当前值PVn
VD104
给定值SPn
VD108
输出值Mn
VD112
增益Kc
VD116
采样时间Ts
VD120
积分时间Ti
VD124 VD128
微分时间Td 上一次积分值Mx
VD132 上一次过程变量PVn-1
数值 水位检测计提供的模拟量经A/D转换后的标准化数值
ATCH INT_0, 10 // 将INT-0(执行PID)和定时中断连接
ENI
// 全局开中断
中断程序(执行PID指令)
LD SM0.0 ITD AIW0, AC0 // 将整数转换为双整数 DTR AC0, AC0 // 将双整数转换为实数 /R 32000.0, AC0 // 标准化数值 MOVR AC0, VD100 // 将标准化PV写入回路参数表
PID调节实例

PID调节器使用方法的例子1引子在生长过程中的自动控制中,PID控制规律一直占主导地位.。
只要调整合适的PID参数,就可以得到很好的调节效果。
在高速熔融纺丝中,冷却成型是熔体纺丝的重要过程之一。
冷却测吹风的温、湿度控制质量好坏对产品质量有很大影响。
但由于温度、相对湿度相互影响,按常规整定方法,PID调节器的参数整定比较困难,而调节时间又长,不利于正常生产。
通过在实践中不断的摸索,确定了一套简便、可靠的整定方法,在现场使用情况令人满意。
2测吹风装置的控制原理、工艺要求、工艺流程我们所使用的测吹风装置是外界新风经初过滤器过滤,再由第一加热器使用蒸汽加热,进入冷却器由冷却水冷却,再入喷淋室给空气加湿。
然后进入第二加热器去湿后入精过滤器,去掉杂质使空气清洁后送入纺丝箱体,工艺流程见图表1。
图表 2 工艺流程图根据工艺要求,温度的控制范围为22±1℃,相对温度控制范围为70%±5%RH。
温度过高:关一次加热阀或开冷冻水阀;温度过低:开一次加热阀或关冷冻水阀;湿度过高:开二次加热阀或关喷淋阀;湿度过低:关二次加热阀或开喷淋阀;为了保证温度和湿度的正常控制范围,要选择适当的调节阀,使一次加热阀和冷冻水阀不同时开启和关闭,同时也使喷淋阀和二次加热阀的起始工作压力不通,使之不能同时工作。
而这些调节阀最终是由控制室内的PID控制器通过PID参数调节发出信号来控制的,温度的控制过程如图表2,湿度的控制过程所示图表 3图表2温度控制过程图表 3 湿度控制过程3温度、湿度调节参数的整定影响温度控制的参数很多,如外界气温的急剧变化,蒸汽压力的波动,冷冻水的温度变化以及蒸汽疏水阀工作情况的好坏等。
根据设计要求,蒸汽压力应在0.3±0.1MPa内,冷冻水温度应为8±2℃内。
调节温度时,应根据当时的室外温度,大致估计蒸汽或冷冻水阀门开度调至所估计的开度。
同时,将PID调节器置为纯比例状态,直到温度曲线趋于稳定,再适量加一些微分和积分作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[电机与驱动] 一个简单的PID
PID
#include <hidef.h> /* common defines and macros */ #include "derivative.h" /* derivative-specific definitions */
#include <mc9s12xs128.h>
//定义PID参数
#define VV_KPVALUE 3 //比例
#define VV_KIVALUE 40 //积分
#define VV_KDVALUE 3 //微分
#define VV_MAX 10000 //返回的最大值,是pwm的周期值
#define VV_MIN 0
#define VV_DEADLINE 0X08 //速度PID,设置死区范围
typedef struct PID //定义数法核心数据
{
signed int vi_Ref; //速度PID,速度设定值
signed int vi_FeedBack; //速度PID,速度反馈值
signed long vi_PreError; //速度PID,前一次,速度误差,,vi_Ref - vi_FeedBack signed long vi_PreDerror; //速度PID,前一次,速度误差之差,d_error-PreDerror;
unsigned int v_Kp; //速度PID,Ka = Kp
unsigned int v_Ki; //速度PID,Kb = Kp * ( T / Ti )
unsigned int v_Kd; //速度PID,
signed long vl_PreU; //电机控制输出值
}PID;
PID sPID; // PID Control Structure
void PIDInit(void)
{
sPID.vi_Ref = 0 ; //速度设定值
sPID.vi_FeedBack = 0 ; //速度反馈值
sPID.vi_PreError = 0 ; //前一次,速度误差,,vi_Ref - vi_FeedBack
sPID.vi_PreDerror = 0 ; //前一次,速度误差之差,d_error-PreDerror;
sPID.v_Kp = VV_KPVALUE;
sPID.v_Ki = VV_KIVALUE;
sPID.v_Kd = VV_KDVALUE;
sPID.vl_PreU = 0 ; //电机控制输出值
}
unsigned int v_PIDCalc( PID *pp )
{
signed long error,d_error,dd_error;
error = (signed long)(pp->vi_Ref - pp->vi_FeedBack); // 偏差计算
d_error = error - pp->vi_PreError;
dd_error = d_error - pp->vi_PreDerror;
pp->vi_PreError = error; //存储当前偏差
pp->vi_PreDerror = d_error;
if( ( error < VV_DEADLINE ) && ( error > -VV_DEADLINE ) ); //设置调节死区
//速度PID计算
pp->vl_PreU += (signed long)( pp -> v_Kp * d_error + pp -> v_Ki * error +
pp->v_Kd*dd_error);
else if( pp->vl_PreU >= VV_MAX ) //速度PID,防止调节最高溢出
pp->vl_PreU = VV_MAX;
else if( pp->vl_PreU <= VV_MIN ) //速度PID,防止调节最低溢出
pp->vl_PreU = VV_MIN;
else
;
return ( pp->vl_PreU ); // 返回预调节占空比
}
void main(void) {
/* put your own code here */
InitMCu();
IncPIDInit();
int g_CurrentVelocity=0; //全局变量也初始化
int g_Flag=0; //全局变量也初始化
EnableInterrupts;
While(1)
{
if (g_Flag&&vi_FeedBack)
{
PWMOUT+= v_PIDCalc( PID *pp );
g_Flag&=~ vi_FeedBack;
}
}
}
for(;;) {
_FEED_COP(); /* feeds the dog */
} /* loop forever */
/* please make sure that you never leave main */
}。