第五章算法简介
数论算法讲义5章(原根与指标)
第 5 章 原根与指标(一) 内容● 指数 ● 原根● 有原根的整数 ● 指标(对数)(二) 重点● 原根及其意义 ● 有原根的整数的条件 ● 指标及其性质5.1 指数及其基本性质准备知识:(1) 欧拉定理:m >1,(a,m)=1,则()m a ϕ≡1(mod m )(2) 问题:①()m ϕ是否是使得上式成立的最小正整数? ②该最小正整数有何性质? (一) 指数和原根概念【定义5.1.1】(定义1)设m >1,(a,m)=1,则使得e a ≡1(mod m )成立的最小正整数e 叫做a 对模m 的指数(或阶),记作m ord (a)。
若a 的指数e =()m ϕ,则a 叫做模m 的原根。
(二) Diffie —Hellman 密钥交换算法全局公开量q 素数α q 的原根(α<q )交换公开密钥 A →B : A Y B →A : B Y例如:● 素数q =353,原根α=3● A 选 A X =97, 计算A Y ≡973≡40 mod 353 ● B 选 B X =233, 计算B Y ≡2333≡248 mod 353 ● A 与B 交换● A 计算密钥 K ≡97248≡160 mod 353 ● B 计算密钥 K ≡23340≡160 mod 353(三) 用定义求指数和原根【例1】(按定义求指数和原根)(例1)m =7,则ϕ(7)=6。
且11≡1,32≡1,63≡1,34≡1,65≡1,26≡1(mod 7)故对模数7而言,1,2,3,4,5,6的指数分别为1,3,6,3,6,2。
列表表示为因此,3,【例2】(快速求指数)(例2)m =14=2·7, ϕ(14)=6,则11≡1,33≡-1,35≡-1,39≡1,311≡1,213≡1(mod7)列表故3,5【例3】(无原根的整数)(例3)m =15=3·5, ϕ(15)=8,则同理,可知模数m =9时,其原根为2,5;而整数8则没有原根。
第5章552均方误差准则MSE和LMS算法

第5章552均方误差准则MSE和LMS算法第5章主题:均方误差准则(MSE)和最小均方算法(LMS)在信号处理和机器学习中,常常需要优化一些模型的性能,使其能够更好地适应数据。
均方误差准则(Mean Square Error, MSE)和最小均方算法(Least Mean Squares, LMS)是两种常用的优化方法。
均方误差准则(MSE)是一种衡量模型性能的方法,它通过计算预测值与实际值之间的差异来评估模型的准确性。
MSE的计算公式如下:MSE = (1/n) * Σ(y - yhat)²其中,n表示数据点的数量,y表示实际值,yhat表示预测值。
MSE 越小,表示模型的拟合效果越好。
最小均方算法(LMS)是一种基于梯度下降的优化算法,用于寻找使MSE最小化的模型参数。
LMS的基本思想是通过迭代的方式逐步调整模型参数,使MSE逐渐减小。
具体而言,LMS算法根据梯度信息来更新模型参数的值。
LMS算法的更新公式如下:w_new = w_old + η * (y - yhat) * x其中,w_new表示更新后的参数值,w_old表示之前的参数值,η是学习率(learning rate),用于控制每次更新的步幅,y表示实际值,yhat表示预测值,x表示输入数据。
LMS算法的步骤如下:1.初始化参数w和学习率η的值。
2. 对于每个数据点,计算预测值yhat。
3.计算MSE,并检查是否达到了停止条件。
4.如果未达到停止条件,根据LMS算法的更新公式,更新参数w的值。
5.重复步骤2-4,直到满足停止条件。
LMS算法的优点是简单易于实现,但其性能可能受到初始参数和学习率的选择影响。
学习率过大可能导致算法不稳定,学习率过小可能导致算法收敛速度慢。
总结起来,MSE和LMS算法是两种常用的优化方法,用于评估模型的准确性和调整模型参数的值。
它们在信号处理和机器学习领域应用广泛,可以用于回归问题和分类问题的优化。
05-第五章-快速傅里叶变换(蝶形运算)

W
r N
的确定
W
r N
的确定
以N=8为例:
m 1 时 W N r W , N j/4 W 2 j m W 2 0 ,j 0
m 2 时 W N r W , N j/2 W 2 j m W 4 j,j 0 , 1
m 3 时 W N r W N , j W 2 j m W 8 j,j 0 , 1 , 2 , 3 N2M,第L级:
8.0 1024 1 048 576 5 120 204.8
12.8 2048 4 194 304 11 264 372.4
64 4049 192
21.4
24
5.3.3 按时间抽取的FFT算法的特点
序列的逆序排列
同址运算(原位运算)
蝶形运算两节点间的距离
W
r N
的确定
25
序列的逆序排列
序列的逆序排列
以N/2点序列x1(r)为例
x1x (1 2 (l2 l)1 ) x3 x(4 l()l)
l0,1, ,N1 4
则有
N21
N4 1
N4 1
X1(k) x1(r)WNrk2 x1(2 l)W N 2l2k x1(2 l 1 )W N (2 2 l 1 )k
r0
l 0
l 0
N41
N41
x3(l)W N lk 4W N k2 x4(l)W N lk 4
FFT并不是一种与DFT不同的变换,而是 DFT的一种快速计算的算法。
3
5.2 直接计算DFT的问题及改进的途径
DFT的运算量
设复序列x(n) 长度为N点,其DFT为
N1
X(k) x(n)WNnk n0
k=0,,…,N-1
第五章基本自适应算法
第五章基本自适应算法自适应算法是一种能够根据问题的性质和特点来调整自身参数以达到更好效果的算法。
在机器学习和优化问题的求解中,自适应算法可以提高算法的鲁棒性、收敛性和性能。
本章将介绍几种基本的自适应算法。
1.自适应学习率学习率是很多优化算法中的一个重要参数。
学习率过大会导致算法不稳定,学习率过小会导致算法收敛速度慢。
自适应学习率算法是一种能够根据问题的性质自动调整学习率的算法。
常见的自适应学习率算法有动态学习率和自适应学习率调整。
动态学习率是指学习率随着迭代次数的增加而不断减小。
自适应学习率调整是指根据每次迭代的损失函数值调整学习率。
这种方法可根据损失函数值的大小动态调整学习率,使得在损失函数较大时学习率较大,在损失函数较小时学习率较小,从而提高算法的收敛速度和性能。
2.自适应粒子群算法粒子群算法是一种模拟鸟群寻找食物的优化算法。
在标准粒子群算法中,粒子通过随机移动来最优解。
然而,随机性可能会导致算法陷入局部最优解。
为了克服这个问题,引入了自适应粒子群算法。
自适应粒子群算法基于控制参数的统计特性来调整方向和速度。
通过自适应调整的参数,算法可以自动适应问题的特性,从而达到更好的效果。
3.自适应遗传算法遗传算法是一种模拟生物进化的优化算法。
在标准遗传算法中,通过交叉和变异产生新的个体,并通过适应度函数选择优秀个体进行下一代的繁衍。
然而,遗传算法的结果可能会受到参数的选择和问题的变化的影响。
为了提高算法性能,自适应遗传算法引入了自适应策略。
自适应策略通过根据个体适应度来调整交叉和变异参数,从而使算法能够自动适应问题的特性。
这样可以提高算法的鲁棒性和性能。
4.自适应步长差分进化算法差分进化算法是一种基于种群的优化算法。
在标准差分进化算法中,通过选择个体的差分向量来产生新的个体,并通过适应度函数选择优秀个体进行下一代的繁衍。
然而,差分进化算法的步长参数对算法的性能有很大的影响。
为了提高算法的性能,自适应步长差分进化算法引入了自适应步长。
第5章 算法与复杂性

5.7 可计算性理论基础
研究计算的可行性和函数算法的理论,又称算法 理论,是算法设计与分析的基础,也是计算机科 学的理论基础。可计算性是函数的一个特性。
5.8 NP问题
NP(Non-deterministic Polynomial)问题是非确定性多 项式问题,是指算法无法直接计算出结果,只能通过进 行一些有选择的“猜算”来得到结果。 NP问题的研究结果有两种可能: 一种是找到了求解问题的算法; 另一种就是求解问题的算法是不存在的,那么就要从数
钥,通常有两个密钥,称为“公钥”和“私钥”,它 们两个必须配对使用,否则不能打开加密文件。
5.10 加密算法
常见加密算法有如下: (1)DES(Data Encryption Standard):数据加密标准,速 度较快,适用于加密大量数据的场合。 (2)3DES(Triple DES):是基于DES,对一块数据用3个不 同的密钥进行3次加密,强度更高; (3)RC2和RC4:用变长密钥对大量数据进行加密,比DES 快。 (4)IDEA(International Data Encryption Algorithm)国 际数据加密算法,使用128位密钥提供非常强的安全性。 (5)RSA:由RSA公司发明,是一个支持变长密钥的公共密 钥算法,需要加密的文件块的长度也是可变的。 (6)DSA(Digital Signature Algorithm):数字签名算法, 是一种标准的DSS(数字签名标准)。
第5章 搜索与回溯算法(C 版)

【参考程序】
#include<cstdio> #include<iostream> #include<cstdlib> using namespace std; int a[10001]={1},n,total; int search(int,int); int print(int); int main() {
int print();
//输出方案
int main() {
cout<<"input n,r:"; cin>>n>>r; search(1); cout<<"number="<<num<<endl; }
//输出方案总数
int search(int k) {
int i; for (i=1;i<=n;i++) if (!b[i])
(r<n),试列出所有的排列。
#include<cstdio>
#include<iostream>
#include<iomanip>
using namespace std;
int num=0,a[10001]={0},n,r;
bool b[10001]={0};
int search(int);
//回溯过程
{
for (int j=0;j<=3;j++)
//往4个方向跳
if (a[i-1][1]+x[j]>=0&&a[i-1][1]+x[j]<=4
&&a[i-1][2]+y[j]>=0&&a[i-1][2]+y[j]<=8)//判断马不越界
第五章 常用插值算法

bp=sp+4; M_GetValue 6; push r3,r4 to [sp]; M_GetValue 3; push r3,r4 to [sp]; M_GetValue 2; push r3,r4 to [sp]; M_GetValue 1; push r3,r4 to [sp]; M_GetValue 0; push r3,r4 to [sp]; call F_LinearInsert; sp+=10; M_StoreValue 3; M_GetValue 6; push r3,r4 to [sp]; M_GetValue 5; push r3,r4 to [sp]; M_GetValue 4; push r3,r4 to [sp]; M_GetValue 1; push r3,r4 to [sp]; M_GetValue 0; push r3,r4 to [sp]; call F_LinearInsert; sp+=10; M_StoreValue 5; M_GetValue 6; push r3,r4 to [sp]; M_GetValue 5; push r3,r4 to [sp]; M_GetValue 4; push r3,r4 to [sp]; M_GetValue 3; push r3,r4 to [sp]; M_GetValue 2; push r3,r4 to [sp]; call F_LinearInsert; sp+=10; pop bp from [sp]; retf; .endp
Y
y = f ( x ) 所示。已知 y 在点 x0
和 x1 的对应值 y 0 和 y1 ;现在要 求 用 一 线 性 插 值 函 数
g ( x ) = ax + b , 近似代替 f ( x ) 。
第5章 计算思维与算法-大学计算机基础与新技术-鲁宁-清华大学出版社

5-11
大学计算机基础与计算思维
Copyright © SWFU-BD&IE, 2019. All rights reserved.
生活中的计算思维(视频)
4.网上购物
推荐图书
推广商品
理解人类行为
5-12
大学计算机基础与计算思维
Copyright © SWFU-BD&IE, 2019. All rights reserved.
什么是计算?核算数目,根据已 知量算出未知量
尼葛洛庞帝(Negroponte)为美国麻省理工学院教授 及媒体实验室的创办人,西方媒体推崇他为电脑和传播科 技领域最具影响力的大师之一,1996年7月被《时代》周刊 列为当代最重要的未来学家之一。
计算不再只和计算机有关,它决定了我们的生 存。——尼葛洛庞帝
周教授认为:计算思维是运用计算机科学的基础概念进行问题求解、 系统设计、以及人类行为理解等涵盖计算机科学领域的一系列思维活 动。总结:计算思维是一种解决问题的能力
它如同所有人具备“读、写、算”(简称3R)能力一样,成为适合于每个人的一种普遍的 认识的技能。
5-3
大学计算机基础与计算思维
Copyright © SWFU-BD&IE, 2019. All rights reserved.
第五章 计算思维与算法
苗晟
5-1
大学计算机基础与计算思维
Copyright © SWFU-BD&IE, 2019. All rights reserved.
本次课主要内容
5.1 计算思维 5.2 可计算问题 5.3 解决问题的一般方法 5.4 用框图表示解决问题的算法 5.5 Python程序设计
5.2 可计算问题
第5章552均方误差准则MSE和LMS算法
第5章552均方误差准则MSE和LMS算法第5章介绍了两个与均方误差准则相关的概念和算法,分别是均方误差(Mean Square Error, MSE)和最小均方(Least Mean Squares, LMS)算法。
首先,我们来介绍均方误差准则。
均方误差是一种常用的衡量预测或估计结果与真实结果之间差异的指标。
在机器学习和模式识别中,我们常常需要根据一些输入数据来预测或估计一些输出结果。
而均方误差就能够帮助我们评估这些预测或估计结果的准确性。
均方误差的计算方法非常简单。
我们首先计算预测结果与真实结果之间的差值,然后将其平方,最后计算这些平方差的平均值。
表达式如下所示:MSE=(1/n)*Σ(y-y')^2其中,MSE表示均方误差,n表示样本数量,y表示真实结果,y'表示预测或估计结果。
接下来,我们来介绍最小均方(Least Mean Squares, LMS)算法。
LMS算法是一种常用的自适应滤波算法,用于根据输入数据来估计一些未知系统的参数,从而实现对输入数据的滤波处理。
LMS算法的核心思想是用当前的估计结果与真实结果之间的误差来调整估计参数,不断更新估计结果,从而逐步逼近真实结果。
具体来说,LMS算法中的参数更新公式如下所示:w(k+1)=w(k)+α*e(k)*x(k)其中,w表示待估计的参数,k表示当前的时间步,α表示学习率,e表示当前的估计误差,x表示当前的输入数据。
根据LMS算法的参数更新公式,我们可以发现,LMS算法每次都会根据当前的估计误差来调整估计参数。
如果当前的估计误差较大,那么LMS 算法就会加大参数的调整量,使得估计结果更快地接近真实结果;反之,如果当前的估计误差较小,那么LMS算法就会减小参数的调整量,从而防止估计结果频繁地跳动。
总结来说,第5章主要介绍了均方误差准则MSE和最小均方(LMS)算法。
均方误差是衡量预测或估计结果与真实结果之间差异的指标,而LMS算法则是一种自适应滤波算法,通过不断调整估计参数来逼近真实结果。
5 第五章分类算法-数据挖掘算法与应用(Python实现)-孙家泽-清华大学出版社
网络、K-近邻、支持向量机等; 用于组合单一分类方法的集成学习算法,如Bagging和
Boosting、adaboost等。
西安邮电大学
5.2 KNN算法原理
KNN(K-NearestNeighbor) 算法是一个理论上比较 成熟的方法,最初由Cover和Hart于1968年提出,其思 路非常简单直观,易于快速实现。
✓ 缩小训练样本的方法:在原有的样本中删掉一部分 与分类相关不大的样本,将剩下的样本作为新的训 练样本或者在原来的训练样本集中选取一些代表样 本作为新的训练样本;
✓ 通过聚类(clustering),将聚类所产生的中心点 作为新的训练样本。
(2)从优化相似度度量方法的角度
基本的KNN算法基于欧几里得距离来计算样本的相 似度,这种方法对噪声特征非常敏感。
可以采用均匀化样本分布密度的方法进行改进。
(4)从选取恰当k值的角度
由于KNN算法中几乎所有的计算都发生在分类阶段, 而且分类效果很大程度上依赖于k值的选取。而目前为 止,比较好的选k值的方法只能是通过反复试验调整。
小结: KNN算法主要依据邻近的k个样本来进行类别的判
断。然后依据k个样本中出现次数最多的类别作为未 知样本的类别。这也就是人们常说的“物以类聚,人 以群分”、“近朱者赤,近墨者黑”。在选择分类算 法时我们应该根据具体应用的需求,选择适当的分类 算法。
KNN可以说是一种最直接的用来分类未知 数据的方法。
5.2.1 KNN算法原理
简单来说,KNN可以 看成:有那么一堆你已 经知道分类的数据,然 后当一个新数据进入的 时候,就开始跟训练数 据里的每个点求距离, 然后挑出离这个数据最 近的K个点,看看这K个 点属于什么类型,然后 用少数服从多数的原则, 给新数据归类。
计算机算法基础(第五章)PPT教学课件

if VISITED(w)=0 then //w未被检测//
call ADDQ(w,Q) //ADDQ将w加入到队列Q的末端//
VISITED(w)←1 //同时标示w已被访问//
endif
repeat
段:LCHILD, DATA,RCHILD//
if T≠0 then call VISIT(T) call PREORDER(LCHILD(T)) call PREORDER(RCHILD(T))
endif end PREORDER
2020/12/11
4
⑵后根次序周游 算法5.2 后根次序周游的递归表示 procedure POSTORDER(T) //T是一棵二元树。T的每个结点有三个信息
2020/12/11
6
注:
一棵二元树可由中根遍历序列+先根遍历序列、或 中根遍历序列+后根遍历序列唯一确定。但不能由先 根遍历序列+后根遍历序列唯一确定。
如已知一棵二元树的中根遍历次序是:
DGBEAFHC
先根遍历次序是:ABDGECFH
A
则这棵二元树唯一确定如下:
B
C
D
E
F
2020/12/11
G
H
② 访问邻接于v且尚未被访问的所有结点——这些结 点是新的未被检测的结点。将这些结点依次放置到一未检 测结点表(队列Q)中(末端插入) 。
③ 标记v已被检测。
④ 若未检测结点表为空,则算法终止;否则
⑤ 从未检测结点表的表头取一结点作为下一个待检
2020/12/11
11
测结点,
算法5.6 宽度优先检索算法
其中,t(0)≤c1。 归纳法证明t(n)≤c2n+c1,其中c2是一使得c2≥2c1的常数。 1)当n=0时,成立
第五章惩罚函数法详解
㈣关于几个参数的选择
⑴初始罚因子r(0)的选取
如果 值选得太大,则在一开始罚函数的惩罚项的 值将远远超出原目标函数的值,因此,它的第一次无约束极 小点将远离原问题的约束最优点。在以后的迭代中,需要很 长时间的搜索才能使序列无约束极小点逐渐向约束最优点逼近。
如果 值选得太小,则在一开始惩罚项的作用甚小,
而在可行域内部惩罚函数
与原目标函数F(x)很相近,
只在约束边界附近罚函数值才突然增高。这样,使其罚函数
在在约束边界附近出现深沟谷地,罚函数的性态变得恶劣。
如下图,对于有深沟谷地性态差的函数,不仅搜索所需的 时间长,而且很难使迭代点进入最优的邻域,以致极易使 迭代点落入非可行域而导致计算的失败。
或
r(0)=1~50
函数
的一系(x,列r(k最) ) 优点,
xk* (k 0,1,2, )
显见,无约束最优点序列将逐渐趋近于原约
束优化问题的最优点x*。
㈡内点罚数法的形式及特点
⑴具有不等式约束的优化问题的数学模型
S.T. :
u=1,2……,p
⑵构造如下形式的内点罚函数
p
(x, r (k) ) F (x) r (k)
而且,当x越趋近于约束边界时,由于惩罚项 r(k) 1
增大,所以罚函数 (x, r(的k) )值越大。当x←b时,罚g1函(x)
数的值将趋近于+∞。因此,当初始点取在可行域内,求
函数 (x, r(k)的) 极小值时,只要适当控制搜索步长,
防止迭代点跨入非可行域,则所搜索到的无约束极小点 x*必可保持在可行域内。
⑹由终止准则,若满足则转步骤⑺,否则转⑸⑺,输出最优解(x*,F*)
入口
给定:x(0) ∈D,r(0),C,ε1,ε2
第五章拉格朗日松弛算法
第五章拉格朗日松弛算法拉格朗日松弛算法(Lagrangian relaxation algorithm)是一种数学优化算法,用于求解在约束条件下的最优解。
它的基本思想是通过引入拉格朗日乘子,将原问题转化为一个无约束的问题,进而通过求解该无约束问题的下界或上界,得到原问题的近似最优解。
拉格朗日松弛算法的基本步骤如下:1.构建原问题的拉格朗日函数。
拉格朗日函数通常由原问题的目标函数和约束条件构成,其中引入拉格朗日乘子对应于约束条件。
将原问题的约束条件转化为一个惩罚项,该惩罚项与拉格朗日乘子的乘积表示。
2.对拉格朗日函数进行极小化。
极小化拉格朗日函数相当于求解一个无约束的优化问题。
可以应用原问题的优化技术,如梯度下降法或牛顿法等,来求解该无约束问题。
3.更新拉格朗日乘子。
根据当前的极小化解,更新拉格朗日乘子以接近于原问题的约束条件。
这通常通过计算其中一种形式的梯度或子梯度来进行。
4.判断收敛条件。
判断当前解是否满足约束条件和目标函数的收敛。
如果满足,则算法终止;否则,返回第2步。
拉格朗日松弛算法的优点在于它能够通过引入拉格朗日乘子来简化原始问题,并将复杂的约束条件转化为一个无约束问题进行求解。
由于不再需要考虑原问题的约束条件,使得求解过程更加高效。
然而,拉格朗日松弛算法也有一些限制。
首先,它只能提供原问题的非严格最优解。
其次,算法的求解效果取决于拉格朗日乘子的选择和更新过程。
如果乘子选择不合适或更新不及时,可能会导致算法收敛缓慢或跳过最优解。
总之,拉格朗日松弛算法是一种常用的优化算法,它通过引入拉格朗日乘子,将原问题转化为一个无约束的问题进行求解。
尽管存在一些限制,但该算法仍然被广泛应用于各种问题的求解中,如线性规划、组合优化等。
最优化理论与算法(第五章)
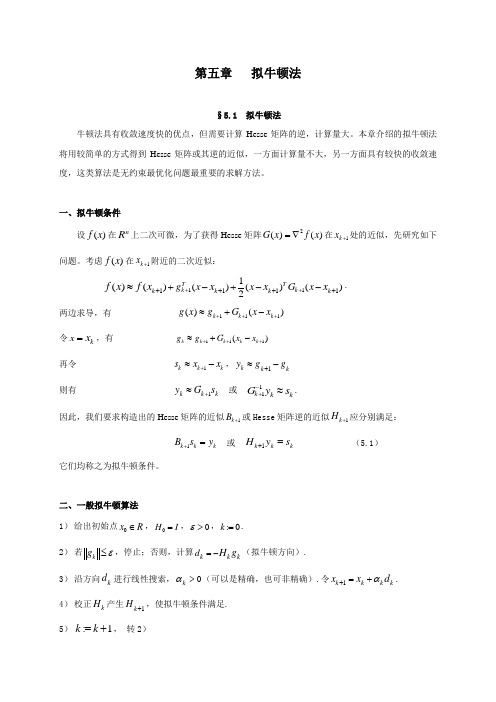
第五章 拟牛顿法§5.1 拟牛顿法牛顿法具有收敛速度快的优点,但需要计算Hesse 矩阵的逆,计算量大。
本章介绍的拟牛顿法将用较简单的方式得到Hesse 矩阵或其逆的近似,一方面计算量不大,另一方面具有较快的收敛速度,这类算法是无约束最优化问题最重要的求解方法。
一、拟牛顿条件设()f x 在nR 上二次可微,为了获得Hesse 矩阵2()()G x f x =∇在1k x +处的近似,先研究如下问题。
考虑()f x 在1k x +附近的二次近似:1111111)()()()2()(TT k k k k k k g x x G x f x f x x x x +++++++-+--≈. 两边求导,有 111()()k k k g x g G x x +++≈+- 令k x x =,有 111()k k k k k g g G x x +++≈+- 再令 1k k k s x x +≈-,1k k k y g g +≈-则有 1k k k y G s +≈ 或 11kkk G y s -+≈.因此,我们要求构造出的Hesse 矩阵的近似1k B +或Hesse 矩阵逆的近似1k H +应分别满足:1k k k B s y += 或 1k kk H y s += (5.1)它们均称之为拟牛顿条件。
二、一般拟牛顿算法1) 给出初始点0x R ∈,0H I =,0ε>,:0k =.2) 若k g ε≤,停止;否则,计算k k k d H g =-(拟牛顿方向).3) 沿方向k d 进行线性搜索,0k α>(可以是精确,也可非精确).令1k k k k x x d α+=+. 4) 校正k H 产生1k H +,使拟牛顿条件满足. 5) :1k k =+, 转2)拟牛顿法较之牛顿法有下述优点: 1) 仅需梯度(牛顿法需Hesse 矩阵);2) k H 保持正定,因而方向具有下降性质(而牛顿法中k G 可能不定); 3) 每次迭代需2()O n 次运算,而牛顿法需3()O n 次运算。
第5章 蚁群优化算法
2.1.3
蚁群优化算法研究背景
13
1/3
群智能理论研究领域有两种主要的算法:蚁 群算法(Ant Colony Optimization, ACO) 和微粒群算法(Particle Swarm Optimization, PSO)。 前者是对蚂蚁群落食物采集过程的模拟,已成功 应用于许多离散优化问题。 微粒群算法也是起源于对简单社会系统的模拟, 最初是模拟鸟群觅食的过程,但后来发现它是 一种很好的优化工具。
5
LC=2LB
蚂蚁从A点出发,速度相同,食物在D点,可能随机选择路 线ABD或ACD。假设初始时每条分配路线一只蚂蚁,每个 时间单位行走一步,本图为经过9个时间单位时的情形:走 ABD的蚂蚁到达终点,而走ACD的蚂蚁刚好走到C点,为一 半路程。
6
LC=2LB
本图为从开始算起,经过18个时间单位时的情形:走 ABD的蚂蚁到达终点后得到食物又返回了起点A,而走 ACD的蚂蚁刚好走到D点。
10
1.1.1 蚁群优化算法起源
11
20世纪50年代中期创立了仿生学,人们从生物进化的机理中 受到启发。提出了许多用以解决复杂优化问题的新方法,如进 化规划、进化策略、遗传算法等,这些算法成功地解决了一些 实际问题。 20世纪90年代意大利学者M.Dorigo,V.Maniezzo, A.Colorni等从生物进化的机制中受到启发,通过模拟自然界 蚂蚁搜索路径的行为,提出来一种新型的模拟进化算法—— 蚁 群算法,是群智能理论研究领域的一种主要算法。 用该方法求解TSP问题、分配问题、job-shop调度问题,取得了 较好的试验结果.虽然研究时间不长,但是现在的研究显示出, 蚁群算法在求解复杂优化问题(特别是离散优化问题)方面有 一定优势,表明它是一种有发展前景的算法.
计算机科学概论 第5章 数据结构与算法
2 线性结构
2.3 串和数组 2.数组的定义和操作 • 数组的操作 initarray(&A,n,bound1,bound2...boundn) ——初始化 Destroyarray(&A) —— 删除数组 value(A,&e,index1,index2......indexn) —— 赋值 assign(&A,e,index1,index2......indexn) —— 分配数组
1 数据结构概述
1.4 算法及其描述和算法分析
5、算法与数据结构的关系: • 计算机科学家沃斯(N.Wirth)提出的: “算法+数据结构=程序” 揭示了程序设计的本质:对实际问题选择一种好的数据结构, 加上设计一个好的算法,而好的算法很大程度上取决于描述 实际问题的数据结构。算法与数据结构是互相依赖、互相联 系的。
2 线性结构
2.3 串和数组 1.串的定义和表示方法 • 串的表示方法 定长顺序存储表示 两种表示方法: 1)下标为0的数组存放长度 (pascal) typedef unsigned char SString[MAXSTLEN+1] ; 2)在串值后面加‘\0’结束 (C语言) 堆分配存储表示 串变量的存储空间是在程序执行过程中动态分配的, 程序中出现的所有串变量可用的存储空间是一个共享空 间,称为“堆”。
R={<1,2>,<1,3>,<2,4>,<2,5>,<2,6>,<2,8>,<3,2>,<3,4>,
<4,5>,<5,7>,<6,7>,<6,9>,<7,9>,<8,9>}
第五章_磁盘移臂调度算法
思考:假设磁盘访问序列: 98, 183, 37, 122, 14, 124, 65, 67 读写头起始位置:53 试安排磁头服务序列,并计算磁头移动总距离(道数)
四、循环扫描算法CSAN(Circular SCAN)(不考) SCAN算法存在这样的问题:当磁头刚从里向外 移动过某一磁道时、恰有进程请求访问此磁道,这 时该进程必须等待,待磁头从里向外.然后再从外 向里扫描完所有要访问的磁道后、才处理该进程的 请求,致使该进程的请求被严重地推迟。为了减少 这种延迟, SSTF的另一个修改版本是循环扫描法 (CSAN)。 该算法规定磁头单向移动。例如,只自里 向外移动,当磁头移到最外的被访问磁道时,磁头 立即返回到最里的欲访磁道,即将最小磁道号紧接 着最大磁道号构成循环,进行扫描。即一个在磁道0 上的I/O请求,将在磁道400上请求之后马上可以得 到满足。
思考:假设磁盘访问序列: 98, 183, 37, 122, 14, 124, 65, 67 读写头起始位置:53 试安排磁头服务序列,并计算磁头移动总距离(道数)
三、扫描(SCAN)算法(电梯调度算法) 具体做法:当设备无访问请求时,磁头不动; 当有访问请求时,磁头按一个方向移动,在移动过 程中对遇到的访问请求进行服务,然后判断该方向 上是否还有访问请求,如果有则继续扫描;否则改 变移动方向,并为经过的访问请求服务,如此反复.
按按此策略完成这组I/O操作需移动磁头的总距 离为490磁道。。(如右下图所示) 当前磁道=100 移动方向=OUT(向0道) 该方法克服了最短 进程号 磁道号 移动距离(磁道数) 寻道优先的缺点,既考 22 56 44 虑了距离,同时又考虑 29 40 16 了方向。 32 29 11 4 19 10 但是,必须说明, 12 19 0 这种修改的SCAN调度 34 18 1 策略并不总是优于纯 17 3 15 7 134 131(移动方向=IN) SSTF调度算法。 14 192 58 由于这种算法中磁 23 205 13 头移动的规律颇似电梯 9 376 171 的运行,故又常称为电 3 396 20 磁头移动的总距离=490 (磁道) 梯调度算法
第5章(5.5.2)均方误差准则(MSE)和LMS算法汇总

5.5.2均方误差准则(MSE )和LMS 算法引言:均方误差准则同时考虑ISI 及噪声的影响,使其最小化。
本节讨论问题: 1. 均方误差准则;2. 无限长LMS 均衡器(C (z ),J min );3. 有限长LMS 均衡器(C opt ,J min );4. LMS 算法;5. 均衡器的操作;6. 递推LMS 算法收敛特性的分析。
一. 均方误差准则信息符号的估计值:ˆk j k jj I c ∞-=-∞=∑v (无限长均衡器情况)其中, 接收数据样本为:k n k n k nf I η-=+∑v ,k η为白噪声。
估计误差:ˆISI k k k kI I εε=-,包括及噪声 定义:估计值2ˆ[]k kI J E ε=的均方误差为均衡器的性能指数。
{k ηε均方误差准则:使均方误差性能指数J 最小(min J ),此准则同时考虑使ISI 及噪声影响最小。
获得min J 的途径:调整{}j c ,当min J J =时,opt C C =(最佳抽头系数)寻找opt C 的方法:1)根据正交性原理(线性均方估计):*[]0k k l E l ε-=,所有v 。
(注:与ZF 准则不同的是,这里的输入是经过两个输入滤波器的数据样本k v ,这就包含了噪声)。
即*ˆ[]0kkl E l ε-=,所有I 。
2)求函数极值方法:令?0=→=∂∂opt kJC C 2013年5月3日星期五上午讲于此处,已经是第十次矣。
这两种方法是等价的,证明如下。
证明:求导置零方法与正交性原理等价。
ˆl i m Kkjkj j kjK j j KI c c∞--→∞=-∞=-==∑∑v vlim T k K →∞=V c假如均衡器为有限长,则ˆT k kI =V c 其中11Tk k K k K kk K k K v v v v v ++--+-⎡⎤=⎣⎦V ,以及 11TKK K K c c c c c --+-⎡⎤=⎣⎦c 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章 算法简介通常系统由数字电路和模拟电路组成,模拟电路主要用于信号的处理,数字电路主要用于采集和控制系统。
系统控制通常在单片机或可编程逻辑器件中通过软件实现,这些软件控制思想经过累积、总结,最后形成算法思想。
算法思想可实现系统控制、数据压缩和恢复、数字滤波等功能,熟悉这些算法思想的控制原理和实现方法有利于完善系统的控制。
5.1 数字PID 控制算法在连续时间控制系统中,PID 控制器应用非常广泛,其设计技术成熟,长期以来形成了典型的结构,参数整定方便,结构更改灵活。
由于计算机程序的灵活性,数字PID 控制比连续PID 控制更为优越。
5.1.1 PID 控制系统简介连续时间PID 控制系统如图5-1所示,D (s )完成PID 控制规律,称为PID 控制器。
PID 控制器是一种线性控制器,用输出量y (t )和给定量r (t )之间的误差的时间函数e (t )=r (t )-y (t )的比例、积分和微分的线性组合构成控制量u (t ),称为比例(Proportional )、积分(Integrating )、微分(Differentiation )控制,简称PID 控制。
PID 控制组合了比例控制、积分控制和微分控制这三种基本控制规律,通过改变调节器参数来实现控制,其基本输入输出关系为:])()(1)([)(0dtt de T dt t e T t e K t u DtIP ++=⎰实际应用中,可以根据受控对象的特性和控制的性能要求,灵活采用比例(P )控制器、比例+积分(PI )控制器、比例+积分+微分(PID )控制器三种不同控制组合。
图5-1 连续时间PID 控制系统5.1.2 PID 参数控制效果分析PID 控制的三基本参数为P K 、I K 、D K ,经实验测试,可总结出这三项参数的实际控制作用为:比例调节参数(P K ):按比例反映系统的偏差,系统一旦出现偏差,比例调节立即进行。
比例调节是主要的控制部分,但过大的比例会使系统的稳定性下降。
增大P K ,系统的反应变灵敏、速度加快、稳态误差减小,但振荡次数也会加多、调节时间加长。
积分调节参数(I K ):消除系统静态(稳态)误差()]()([lim )(limt C t R t e t t -=∞→∞→),提高系统的控制精度。
积分调节会使系统的稳定性下降,动态响应变慢,超调加大。
积分控制一般不单独作用,而是与P 或者PD 结合作用。
微分调节参数(D K ):反映系统偏差信号的变化率,可以预见偏差的变化趋势,产生超前控制作用,使偏差在未形成前已被消除。
因此,微分控制可以提高系统的动态跟踪性能,减小超调量,但对噪声干扰有放大作用,过强的微分调节会使系统剧烈震荡,对抗干扰不利。
常规的PID 控制系统中,减少超调和提高控制精度难以两全其美。
主要是积分作用有缺陷造成的。
如果减少积分作用,静差不易消除,有扰动时,消除误差速度变慢;而加强积分作用时又难以避免超调,这也是常规PID 控制中经常遇到的难题。
5.1.3 数字PID 控制的实现数字PID 控制是通过算法程序实现PID 控制的。
数字控制系统大多数是采样数据控制系统,进入系统的连续时间信号必须经过采样和量化后转换为数字量,方能进行相应的计算和处理,不论是积分还是微分,只能用数值计算去逼近。
当采样周期相当短时,用求和代替积分,用差商代替微商,将描述连续时间PID 算法的微分方程变为描述离散时间PID 算法的差分方程。
数字PID 控制通常有以下两种实现:(1).位置式PID 控制算法图5-2 位置式PID 控制算法实现框图图5-2为位置式PID 控制算法的实现框图,根据此框图得到差分方程:010010)()(u e e K e K e K u e e T T e T Te K u n n D ni i I n P n n S Dni i ISn Pn +-++=+⎥⎦⎤⎢⎣⎡-+++=-=-=∑∑此式是数字PID 算法的非递推形式,称全量算法,其中 0u 为控制量基值(n=0时的控制量);n u 为第n 个采样时刻的控制量;S T 为采样周期。
算法中为实现求和,必须存储系统偏差的全部值i e ,得出的全量输出n u 是控制量的绝对数值,这种控制量确定了执行机构在控制系统中的位置(如阀门控制中,输出对应阀门的位置),因此将这种算法称为“位置算法”。
(2).增量式PID 控制算法当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID 的“增量算法”,其简化示意图如图5-3所示:图5-3 增量式PID 控制算法简化示意图增量式PID 算法的差分方程为⎥⎦⎤⎢⎣⎡+-++-=-=∆----)2(2111n n n SD n I S n n P n n n e e e T Te T T e e K u u u此时已看不出P 、I 、D 作用的直接关系,只能体现各次误差量对控制作用的影响,但处理时只需要贮存最近的三个误差采样值n e 、1-n e 、2-n e 。
5.1.4 PID 算法的饱和特性实际的控制系统存在着饱和特性(当控制变量达到一定值后,系统的输出变量便不再增长,系统进入饱和区),要求系统的控制变量必须限制在某个范围之内,即maxminu u u ≤≤。
有时候,对控制量的变化率也有限制∙∙≤maxu u,若超出此范围,系统实际执行的不是控制量的计算值,而是控制量的最值(max u 或min u ),达不到预期控制效果,甚至会引起振荡。
这种现象在开工、停工或大幅度改变给定值的情况下尤其容易发生,此时需要改进算法。
(1).位置算法的改进位置式PID 算法中“饱和”主要由积分项引起,称为“积分饱和”。
克服“积分饱和”的关键是限制积分作用,避免积分积累过大,常用方法有以下几种。
① 积分分离法积分分离法是在误差量较大时不进行积分,直至误差在一定值之内后才在控制量的计算中加入积分累积。
差分方程为:)(10-=-++=∑n n D ni i i I n P n e e K e K K e K u其中ε为门限值积分分离法如图5-4所示。
用此法改进的效果较好,程序简单。
图5-4 用积分分离法克服积分饱和② 遇限削弱积分法这种改进算法的基本思想是:当控制进入饱和区后便不再进行积分项的累加,而只执行削弱积分的运算。
这种算法可以避免控制量长时间停留在饱和区。
③ 有效偏差法这种方法是将实际执行的控制量对应的误差值作为有效误差值进行积分累加,而不是用实际的误差值进行积分累加。
(2).增量算法的比例与微分增量式数字PID 算法中没有累加和项,不会出现积分饱和,避免了大的超调和振荡。
但在增量算法中可能出现比例和微分饱和。
为抑制微分饱和、加速系统的动态过程,可采用积累补偿法。
积累补偿法的基本思想是将那些因饱和而未能执行的控制增量信息累积起来,一旦有可能时再补充执行。
5.1.5 PID 参数整定方法 (1).确定控制器结构在选择数字PID 控制参数之前,应先确定控制器结构。
对允许有静差(或稳态误差)的系统,应适当选择P 或PD 控制器,使稳态误差在允许的范围内;对必须消除稳态误差的系统,应选择包含积分控制的PI 或PID 控制器;对于存在滞后的对象,往往都加入微分控制。
一般情况下,PI 、PID 和P 控制器应用较多。
(2).选择参数控制器结构确定后便可开始选择参数,参数的选择要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量稳定在给定值;当环境参数发生变化时,整个系统能保持稳定等等。
这些要求,对控制系统自身性能而言,有些是矛盾的。
往往应尽量满足主要方面的要求,兼顾其他方面,适当的折衷处理。
工程上PID 控制器参数通常是通过试凑法或实验经验公式来确定的。
P K 、IK、D K 较难确定,调节周期可能会很长,要在具体系统中反复调节。
确定参数的具体做法在后文中会有所介绍。
① 采样周期的选择数字PID 控制中需要对控制信号采样,采样周期S T 是需要精心选择的重要参数,系统的性能与采样周期的选择密切相关,选择时主要考虑的因素分析如下:♦ 香农(Shannon )采样定理:maxωπ≤ST (max ω为被采样信号的上限角频率)。
采样定理给出了采样周期的上限,满足时采样信号才能恢复或近似恢复为原模拟信号而不丢失主要信息。
采样周期越小,采样数据控制系统的性能越接近于连续时间控制系统。
♦ 闭环系统对给定信号的跟踪要求采样周期要小。
♦ 从抑制扰动的要求来说,采样周期应该选择得小些。
♦ 从执行元件的要求来看,有时要求输入控制信号要保持一定的宽度。
♦ 从计算精度考虑,采样周期不宜过短。
♦ 从系统成本上考虑,希望采样周期越长越好。
综合上述各因素,应在满足控制系统性能的要求下,尽可能选择低的采样速率。
图5-5给出了选择采样周期的经验,在试凑过程中可根据此经验来预选采样周期,然后进行多次试凑,选择性能较好的一个作为最后的采样周期。
图5-5 采样周期的经验选择表5-1给出了常用被控量的经验采样周期。
表5-1常见被控量的经验采样周期②采用实验试凑法确定参数实验凑试是通过闭环运行或模拟,观察系统的响应曲线,根据各参数对系统的影响反复凑试,直至出现满意的响应,从而确定PID控制参数。
参数的确定主要遵循如下的规则:♦比例项独立实验。
将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线;♦加入积分项。
若在比例控制下稳态误差不能满足要求,加入积分控制。
先将步骤1中选择的比例系数减小为原来的50~80%,再将积分时间置为一个较大值,观测响应曲线。
然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑直至得到较满意的响应,确定比例和积分的参数;♦加入微分项减小超调和震荡。
若经过步骤2,PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制构成PID控制。
先置微分时间T,逐渐加大D T,同时相应地改变比例系数和积分时间,反复试凑直至获得D满意的控制效果和PID控制参数;♦划分小控制区间,测取每个区间最适合PID 参数。
参数相同或相近的归并为一组。
PID参数的改变对控制质量的影响并不十分敏感,因而不同的比例、积分、微分组合,可能达到相近的控制效果。
实际应用中,只要受控过程或受控对象的主要指标达到设计要求,相应的控制器参数即可作为有效的控制参数。
③采用实验经验法确定参数根据实验经验法调整PID参数时常用扩充临界比例度法。
利用这种方法,参数的整定不依赖于受控对象的数学模型,直接在现场整定,简单易行,适用于有自平衡特性的受控对象。