机械原理第五章5-7,8,9,10
机械原理第五章 连杆机构设计
4. 曲柄滑块机构存在曲柄的条件
根据曲柄摇杆机构的演化过程及曲柄摇杆机构曲柄存在的 条件,机架为无穷大+偏距e,则有: 偏置曲柄滑块机构有曲柄的条件:
a
b
① a+e≤b; ② a为最短杆。
若偏距=0,则得对心曲柄滑块机构有曲柄的条件:
① a≤b; ② a为最短杆。
例5-1 图示铰链四杆机构,lBC=50mm,lCD=35mm, lAD=30mm,AD为机架,若为曲柄摇杆机构, 试讨论lAB的取值范围。
机械原理 第五章 平面连杆机构及其设计
§5-1 平面连杆机构的应用及传动特点
§5-2 平面四杆机构的类型和应用
§5-3 平面四杆机构的一些共性问题 §5-4 平面四杆机构的设计
§5-1 平面连杆机构的应用及传动特点
应用举例 如:四足机器人(图片、动画)、内燃机中的曲柄滑块机构、 汽车刮水器、缝纫机踏板机构、仪表指示机构等。
锻压机肘杆机构
可变行程滑块机构
汽车空气泵
单侧曲线槽导杆机构
3)可用于远距离操纵、重载机构,如:自行车手闸机构,挖掘 机等。 4)连杆曲线丰富,可实现特定的轨迹要求,如:搅拌机构, 鹤式起重机等。
挖掘机
搅拌机构
鹤式起重机
二、平面连杆机构的缺点 1)运动副中的间隙会造成较大累积误差,运动精度较低。 2)多杆机构设计复杂,效率低。 3)多数构件作变速运动,其惯性力难以平衡,不适用于高速。 多杆机构大都是四杆机构组合或扩展的结果。 六杆机构及六杆机构的实际应用 本章介绍四杆机构的分析和设计。
1)最短杆长度+最长杆长度≤其余两杆长度之和;(杆长条件) 2)组成该周转副的两杆中必有一杆为最短杆。 2. 铰链四杆机构存在曲柄的条件
1)各杆长度应满足杆长条件; 2)最短杆为连架杆或机架。
机械原理 第五章机械的效率

(机械自锁时已不能运动,它已不能克服任何工作阻力(即使很小),工作阻力
G〈 0 意味着只有工作阻力反向而变成驱动力后,才可能使机械运动,即G〈 0 机 械自锁)
机械原理
第5章机械的效率和自锁
例1偏心夹具
确定当作用在手柄上的力去 掉后夹具不至松开的条件 (即自锁条件)
7。 风 力 发 电 机 中 的 叶 轮 受 到 流 动 空 气 的 作 用 力,
此力在机械中属于
。
A) 驱 动 力;B) 生 产 阻 力; C) 有 害 阻 力; D) 惯 性 力。
8。在机械中阻力与 其作用点速度方向
。
A).相 同; B).一定相反; C).成锐角; D).相反或成钝角 。
机械原理
第5章机械的效率和自锁
思考题:
1。移动副的自锁条件是—————————,转动副的自锁条件是—————— ———,螺旋副的自锁条件是—————————。
2。机械中V带比平带应用广泛,从摩擦角度来看,其主要原因是——————。
3。在由 若 干机 器 并 联 构 成 的 机 组 中, 若 这 些 机 器 的 单 机 效
A) 都 不 可 能;B) 不 全 是;C) 一 定 都。
6。在 车 床 刀 架 驱 动 机 构 中, 丝 杠 的 转 动 使 与 刀 架 固
联 的 螺 母 作 移 动, 则 丝 杠 与 螺 母 之 间 的 摩 擦 力 矩
属于
。
A)驱 动 力;B)生 产 阻 力;C)有 害 阻 力;D)惯 性 力。
(2)并联:由几种机器并联组成的机组。
(3)混联:包含串、并联。
机械原理
第5章机械的效率和自锁
机械原理第五章

正常齿标准 ha* 1, c* 0.25 短齿标准 ha* 0.8, c* 0.3
(6)渐开线圆柱齿轮的基本(基准)齿廓(齿形)
(1)齿条同侧齿廓为平行的直线,齿廓上各点具有相同的压 力角,即为其齿形角,它等于齿轮分度圆压力角。
(2)与齿顶线平行的任一直线上具有相同的齿距p m 。
(7)斜齿齿轮齿条机构
斜齿轮斜齿条啮 合传动应用较少。
(8)非圆齿轮机构
轮齿分布在非圆柱体上,可实现一对齿轮的变 传动比。需要专用机床加工,加工成本较高, 设计难度较大。
这是利用非圆齿轮变传动比的工作原理,设计的 一种容积泵。现已获得实用新型专利。
2、相交轴之间传递运动 (1) 直齿圆锥齿轮机构
s pb a
公
式
d1=mz1 d2=mz2
db1=mz1cos、
ha = ha*m
db2=mz2cos
hf = (ha* + c* )m
da1 d1 2ha m( z1 2ha* )
da2 d2 2ha m( z2 2ha* )
*
*
d f 1 d1 2h f m(z1 2ha 2c )
3.渐开线方程
如右图所示,以OA为极坐标轴, 渐开线上的任一点K可用向径rK和 展角θK来确定。根据渐开线的性 质,有
rb(K +K ) = AN = KN = rbtanK
故 K = tan K - K
式中K称为渐开线在K点的压力角,它是K点作用力F的方
向(K点渐开线的法线方向)与该点速度VK方向的夹角。
两螺旋角数值不等的斜齿轮啮合时, 可组成两轴线任意交错传动,两轮 齿为点接触,且滑动速度较大,主 要用于传递运动或轻载传动。
第五章凸轮机械原理典型例题
推程
r0
O
ω
S,V, a 是确定的
B
B
S
B
α
S0 δ
S δ
S
S0
α1
O’ e O ω
O
α2
δ ω e O’
S0
O
ω
P
tan OP / OB (ds / d ) / (r0 s)
P
P
tan (OP e) / O ' B ((ds / d ) e) / ( r02 e 2 s)
A'
φ Cr B -ω O' A B' V
C' O
α
滚子中心C,半径r 理论轮廓,R=LO'C 基园R0, 推杆中心位置园, R=LOA 凸轮逆时90,推杆 中心A',推杆位置 接触点B' 摆动角φ 压力角α
2 2 tan 假设凸轮轮廓已经做出,要求在凸轮转过δ角时, (OP e) / O ' B ((ds / d ) e) / ( r0 e s) 位移为S,速度为V, V=ω×Lop ,压力角为α。 适当偏距e(左移),使凸轮转过δ角,此时应有 可知:采用适当的偏距且使推杆偏向凸轮轴心 的左侧,可使推程压力角减小,从而改善凸轮 相同位移S,相同速度V。此时压力角为α1; 的受力情况,但使回程的压力角增大,由于回 P为瞬心位置,相同的速度即瞬心P位置是固定的。程的许用压力角很大,故对机构的受力情况影 响不大。 右移,使凸轮转过δ角,此时压力角为α2;
基本概念题
1.选择题
(1)对于远、近休止角均不为零的凸轮机构,当从动件推程按简谐运动 C 规律运动时,在推程开始和结束位置______。 A.不存在冲击 B.存在刚性冲击 C.存在柔性冲击 (2)已知一滚子接触摆动从动件盘形凸轮机构,因滚子损坏,更换了一 个外径与原滚子不同的新滚子,则更换滚子后________。 D A. 从动件运动规律发生变化,而从动件最大摆角不变 B. 从动件最大摆角发生变化,而从动件运动规律不变 C. 从动件最大摆角和从动件运动规律均不变 D. 从动件最大摆角和从动件运动规律均发生变化 (3)已知一滚子接触偏置直动从动件盘形凸轮机构,若将凸轮转向由顺 时针改为逆时针,则_________。 D A. 从动件运动规律发生变化,而从动件最大行程不变 B. 从动件最大行程发生变化,而从动件运动规律不变 C. 从动件最大行程和从动件运动规律均不变 D. 从动件最大行程和从动件运动规律均发生变化
齿轮_机械原理

齿轮基本尺寸的名称和符号 齿顶圆(da 和 ra) 齿距pi 四圆 齿根圆(df 和 rf) 分度圆(d 和 r) 基圆(db 和 rb) 齿顶高ha 齿距pi 三弧 齿厚si 齿根高hf 齿槽宽ei 齿厚si 齿槽宽ei 分度圆
齿顶圆 基圆
齿根圆
同一圆上
三高
pi si ei
rb
rf o
ra
(4)、齿顶高系数和顶隙(径向间隙)系数
齿顶高 齿根高 标准值:
ha
=1, *h
* a
c
* =0.25
c*
顶隙;一齿轮的齿顶与另一个齿轮的槽底间 的径向间隙。用c表示 C=c*m 作用:1)储油润滑 2)避免一齿轮的齿顶与另一个齿轮 的齿槽相接触。 * h* 只要z、m、α、ha 、hf 这五个参数一经确定,齿轮的几何 尺寸,包括轮齿的渐开线形状也即全部确定,因而以上五个 参数称为渐开线标准齿轮的基本参数。
N2 B
B2
A
=
b. 同侧 A1B1= A1N1 - N1B1 = AB = AN1 - N1B = 所以 A1B1= A2B2 =
K1 B2 B1 B N1 N2 K2
A2 A1
A2B2= A2N2 - N2B2
A
AB = AN2 - N2B
= =
=
同侧
3、渐开线方程式
如图所示,基圆上的A点是渐开 线的起始点,K点是渐开线上任 意一点 , 则 ok 即为渐开线在K 点的向径rK,∠AOK即为渐开线 在K点的极角θK。 在图所示的直角三角形ONK中, 因为∠KON=αK,所以有
* h f = ( ha + c* ) m
公 d1=mz1 d2=mz2 db2=mz2cos
机械原理题库第五章、凸轮机构(汇总)
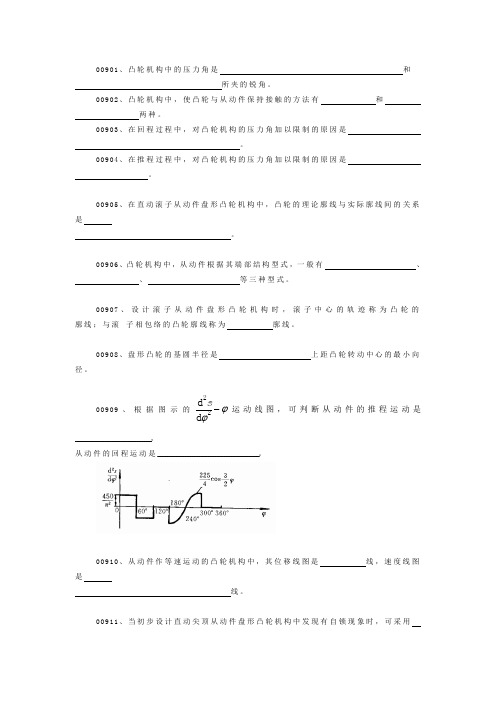
00901、凸轮机构中的压力角是和所夹的锐角。
00902、凸轮机构中,使凸轮与从动件保持接触的方法有和两种。
00903、在回程过程中,对凸轮机构的压力角加以限制的原因是。
00904、在推程过程中,对凸轮机构的压力角加以限制的原因是。
00905、在直动滚子从动件盘形凸轮机构中,凸轮的理论廓线与实际廓线间的关系是。
00906、凸轮机构中,从动件根据其端部结构型式,一般有、、等三种型式。
00907、设计滚子从动件盘形凸轮机构时,滚子中心的轨迹称为凸轮的廓线;与滚子相包络的凸轮廓线称为廓线。
00908、盘形凸轮的基圆半径是上距凸轮转动中心的最小向径。
00909、根据图示的dd2sϕϕ2-运动线图,可判断从动件的推程运动是_________________________________,从动件的回程运动是____________________________________________。
00910、从动件作等速运动的凸轮机构中,其位移线图是线,速度线图是线。
00911、当初步设计直动尖顶从动件盘形凸轮机构中发现有自锁现象时,可采用、、等办法来解决。
00912、在设计滚子从动件盘形凸轮轮廓曲线中,若出现时,会发生从动件运动失真现象。
此时,可采用方法避免从动件的运动失真。
00913、用图解法设计滚子从动件盘形凸轮轮廓时,在由理论轮廓曲线求实际轮廓曲线的过程中,若实际轮廓曲线出现尖点或交叉现象,则与的选择有关。
00914、在设计滚子从动件盘形凸轮机构时,选择滚子半径的条件是。
00915、在偏置直动从动件盘形凸轮机构中,当凸轮逆时针方向转动时,为减小机构压力角,应使从动件导路位置偏置于凸轮回转中心的侧。
00916、平底从动件盘形凸轮机构中,凸轮基圆半径应由来决定。
00917、凸轮的基圆半径越小,则凸轮机构的压力角越,而凸轮机构的尺寸越。
00918、凸轮基圆半径的选择,需考虑到、,以及凸轮的实际廓线是否出现变尖和失真等因素。
机械原理05-机构的型综合

第二节 机构型综合的连杆组合法
第二节
机构型综合的连杆组合法 及其分类
第二节 机构型综合的连杆组合法
(一、连杆组合分类 )
一. 连杆组合分类
机构自由度F:
F =3(N-1)-2p
* 探讨运动链F、N、p间的关系
第二节 机构型综合的连杆组合法
(一、连杆组合分类 )
现研究运动链的一些概念
2 6 1 8 5 4 7 3 5 4 1 8 7 3 2 6
N2 = 4, N3 = 2, N 4 = 0
n =8 ,L =3
N 012 N 111 N 4 0112
1 3N 2 3
2
= 6, N 3 = 0, N 4 = 2
012 012 012 111 012
012 002 111 111 011
0022 0122 0112 1111 1112
将已有基本机构根据其运动转 换、运动性能以及使用范围进行分 类,并以工艺要求为依据选择合适 的基本机构后进行排列组合,从而 得到最佳的机构形式。
第一节 概述
* 机构结构分类法
研究由多少个构件、运动副能 构成给定自由度的结构类型不同的 多少个机构,再从这些机构中选择 出最佳满足工艺要求的机构的一种 型综合方法。
011
011 012 012 013 022 022
013
022 013 112 111 022 112
1113
1122 0023 0122 0113 0022 0112
组合序号
特 性 F=1的运动链, n =4 ,L =1 共六类 17种。 I N =0 , N =0
4 3
1 N3
2 N3
3 N3
n=8 ,L=3
<机械原理>第五章_齿轮机构及其设计
1:22 PM
第五章 齿轮机构及其设计
二、共轭齿廓
凡是满足齿廓啮合基本定律的一 对齿廓叫共轭齿廓。 只要给出一条齿廓曲线,就可以 根据齿廓啮合基本定律求出与其 共轭的另一条齿廓曲线。 理论上满足一定传动比规律的共 轭曲线有很多。如:渐开线、摆 线、变态摆线、圆弧曲线、抛物 线等。
两头牛背上的架子 称为轭,轭使两头牛 同步行走。 共轭即为按一定的 规律相配的一对。
但啮合角≡齿形角
意味着:同1把齿条形刀具制造的齿轮(无论标准或变位、无论 齿数多少)压力角都相同。
1:22 PM 第五章 齿轮机构及其设计
中心距
侧隙 无 有 无 有
顶隙 标准 >标准 标准 >标准
节圆(线) =分度圆 >分度圆
啮合角 =压力角 >压力角
标准 标准齿 安装 轮与标 准齿轮 非标 安装
第五章 齿轮机构及其设计
渐开线的 极坐标参 数方程式
1:22 PM
二、渐开线齿廓
1、渐开线齿廓能满足定传动比的要求
公 两 公 法线是 基圆 切线 通过连心线上 定点 节点 = 一对齿轮传动比
1 O2 P r '2 rb 2 i Const 2 O1P r '1 rb1
第五章 齿轮机构及其设计
标准齿 标准 轮与标 安装 准齿条 非标 安装
标准中心距 >标准中心距 标准中心距 >标准中心距
1:22 PM
第五章 齿轮机构及其设计
§5-5 渐开线直齿圆柱 齿轮的啮合传动
渐开线齿轮的啮合过程
主动轮与从动轮 啮合起始:主动轮齿根部 接触从动轮齿顶 啮合终止:主动轮齿顶接 触从动轮齿根部 啮合点
清华大学机械原理课件--第5章轮系机构

4
4
走刀丝杠的三星轮换向机构
平面定轴轮系(各齿轮轴线相互平行)
第5章 轮系
i12
1 2
z2 z1
i34 4 3zz3 4
i2'3
2 3
z3 z2'
i45 5 4z z5 4
i15 15 (1)3
z2z3z5
z1z2'z3'
z2 z3 z5 z1 z2' z3'
第 5 章 轮系机构
第5章 轮系
主动轮
从动轮
一对圆柱齿轮,传动比不大于5~7
12小时
时针:1圈 分针:12圈 秒针:720圈
i = 12 i = 60
i = 720
问题:大传动比传动
第5章 轮系
问题:变速、换向
第5章 轮系
第5章 轮系
轮系:由一系列彼此啮合的齿轮组成的传动机构, 用于原动机和执行机构之间的运动和动力传递。
周转轮系I
第5章 轮系
周转轮系II
5.1.3 混合轮系:由定轴轮系和周转轮系、或几部分周转
轮系组成的复杂轮系
第5章 轮系
定轴轮系
周转轮系
F = 2 差动轮系
封闭
F = 1 混合轮系
封闭差动轮系
第5章 轮系
混合轮系
?
周转轮系I 周转轮系II
周转轮系I 周转轮系II
各周转轮系相互独立 不共用一个系杆
第5章 轮系
5.3.5 实现运动的合成与分解 差动轮系 F=2 两个输入,一个输出 运动合成
i1H3
z3 z1
1
nH 12(n1 n3) 加法机构
机械原理习题及答案:第5章--连杆

B
31 1
2
32
θ
B1 1 1 4
A
12
ω
B2
2
21
2
C
(b)
5-12 如图为开槽机上用的急回机构。原动件 BC 匀速转动,已知 a = 80mm , b = 200mm ,
l AD = 100mm , l DF = 400mm 。
(1) 确定滑块 F 的上、下极限位置; (2) 确定机构的极位夹角; (3) 欲使极位夹角增大,杆长 BC 应当如何调整?
5-21 设计一个偏心曲柄滑块机构。已知滑块两极限位置之间的距离 C1C 2 =50 ㎜,导路的偏 距 e=20 ㎜,机构的行程速比系数 K=1.5。试确定曲柄和连杆的长度 l AB , l BC 。
B A C2 C1
题图 5-21 解:行程速比系数 K=1.5,则机构的极位夹角为
e
θ = 180°
C B A D
5-10 图中的四杆闭运动链中,已知 a = 150mm , b = 500mm , c = 300mm , d = 400mm 。欲设计一个铰链四杆机构,机构的输入运动为单向连续转动,确定在下列 情况下,应取哪一个构件为机架?①输出运动为往复摆动;②输出运动也为单向连续转动。
解:① 当输出运动为往复摆动时,机构应为曲柄摇杆机构,此时应取四杆中最短杆的相邻 杆,即 b 或 d 作为机架。 ② 当输出运动也为单向连续转动时, 机构应为双曲柄机构, 此时应取四杆中的最短杆, 即 a 作为机架。 5-11 在图 a、b 中, (1) 说明如何从一个曲柄摇杆机构演化为图 a 的曲柄滑块机构、再演化为图 b 的摆 动导杆机构; (2) 确定构件 AB 为曲柄的条件; (3) 当图 a 为偏置曲柄滑块机构,而图 b 为摆动导杆机构时,画出构件 3 的极限位
机械原理(机械的效率和自锁)

2. 每一路的总效率分别为:
2
1
18 12 34 56 78
0.953 0.92 0.79
114 12 910 1112 1314
0.953 0.92 0.79
6
5
11 12
84
3 13
7
9 10
14
3.
整个机构的总效率为:
Pri
Pdi
Pri
Pdi
2
1
Pri P8 P14
小结: 用驱动力或驱动力矩表示的效率公式为:
F0 M 0
FM
用工作阻力或工作阻力矩表示的效率公式为:
G M
G0 M0
F0、M0 —理想驱动力、理想驱动力矩;
F、M —实际驱动力、实际驱动力矩;
G0、M0 — 理想工作阻力、理想工作阻力矩;
G、M — 实际工作阻力、实际工作阻力矩;
当需计算整台机器或整个机组的机械效率时,常用以下三种 方法,其中在实际设计中,更常用到的是实验法和经验法, 即确定机械效率的三种方法分别为: 计算法 实验法 —对于已有的机器,可以用实验法直接测得机械效率。
解:1. 分析机构 该机构为混联机构
串联部分:圆柱齿轮1、2
并联部分:锥齿轮3、4;5、6;
7、8 ; 9、10。
2. 分别计算效率
10
864
2
(1)串联部分: 12 0.95
(2)并联部分:
9
7 5 31
310
P4 P6 P8 P10 P4 P6 P8 P10
34 56 78 910
6
5
11 12
Pdi
P8
18
P14
114
Pri
机械原理典型例题第五章凸轮1020
最小曲率半径处。 X
习题评讲
5-8:标出在图a位置时凸轮的压力角,凸轮从图示位置转过90°后推杆的 位移;标出图b中推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的 压力角。
α α
s
φ s
a
b
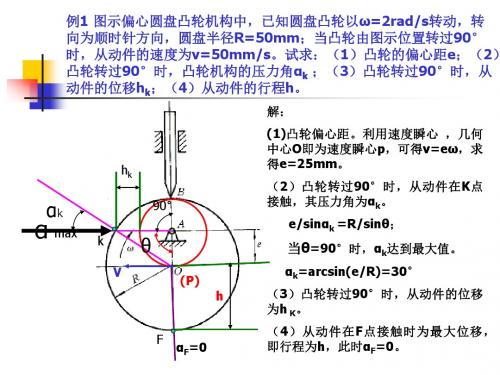
解: (1)凸轮偏心距。利用速度瞬心 ,几何 中心O即为速度瞬心p,可得ν=eω,求 得e=25mm。 90° k V
hk
α max
αk
( 2 )凸轮转过 90°时,从动件在 K 点 接触,其压力角为αk。
e/sinαk =R/sinθ;
θ
(P) h F
当θ=90°时,αk达到最大值。
αk=arcsin(e/R)=30° (3)凸轮转过90°时,从动件的位移 为 h K。
例1 图示偏心圆盘凸轮机构中,已知圆盘凸轮以ω=2rad/s转动,转 向为顺时针方向,圆盘半径R=50mm;当凸轮由图示位置转过90° 时,从动件的速度为ν=50mm/s。试求:(1)凸轮的偏心距e;(2) 凸轮转过90°时,凸轮机构的压力角αk ;(3)凸轮转过90°时,从 动件的位移hk;(4)从动件的行程h。
h
h
α c=0
α c=0
基园r0增大; 行程h不变; 压力角α C不变; hD减小; α D减小。
hD
a
αD
hD
b
αD
例3 尖底偏置直动从动件盘形凸轮机构中,已知凸轮轮廓线为一偏心圆,其 半径R=25mm,偏心距lOA=10mm,偏距e=5mm。求: (1)从动件与凸轮轮廓线在B点接触时的位移hB,压力角αB; (2)将偏置从动件2向左移5mm后,变为对心从动件,此时与轮廓线C点 接触时的压力角αC;比较αB,αC大小,说明题意中的偏置是否合理。 (3)如果偏距e=-5mm,此时的偏置是否合理?
机械原理005第五章摩擦

第五章运动副中的摩擦和机械效率5.1 概述1. 摩擦的产生:摩擦存在于一切作相对运动或者具有相对运动趋势的两个直接接触的物体表面之间。
机构中的运动副是构件之间的活动联接,同时又是机构传递动力的媒介。
因此,运动副中将产生阻止其相对运动的摩擦力。
2. 摩擦的两重性:有益和有害。
3. 摩擦、效率、自锁的关系:摩擦大,效率低,低到一定程度,产生自锁。
5.2 移动副中的摩擦5.2.1. 水平面滑块的摩擦如图5-1(a)所示,滑块A 在驱动力F 的作用下,沿水平面B 向左作匀速运动。
设F 与接触面法线成α角,则F 的切向分力和法向分力分别为:sin ,cos x y F F F F αα==。
平面B 对滑块A 产后法向反力n R和磨擦反力,它们的合力R 称为总反力。
tan fn F f R ϕ==,其中为磨擦系数,称为摩擦角。
如图5-1(b)所示,以R 的作用线绕接触面法线而形成的一个以为锥顶角的圆锥称为摩擦锥。
cos ,cos tan sin ,sin cos tan sin tan tan n y f n x x x f f x R F F F fR F F F F F F F F F ααϕαααϕαϕα======∴==当力F 的作用线在该锥以内或正在该锥上时,即αϕ≤,则有x f F F ≤,所以不论F 有多大,滑块都不会运动,此时滑块发生自锁现象。
自锁条件为αϕ≤(1) 摩擦角ϕ的大小由摩擦系数f 的大小决定,与驱动力F 的大小及方向无关;(2) 总反力R 与滑块运动方向总是成90ϕ+ 角。
5.2.2 斜面平滑块的摩擦一、滑块等速上升如图5-2(a)所示,平滑块置于倾斜角为的斜面上,为作用在滑块上的铅垂载荷(包括滑块自重),为摩擦角。
滑块在水平驱动力作用下沿斜面等速上升,斜面对滑块的总反力为 ,根据平衡条件,可作如图5-2(b)所示的力三角形,从图可得,分析该式可知:等速上升的自锁条件为2πθϕ≥- 。
机械原理第五章 机械的效率和自锁.

机械的效率(2/10)
2.机械效率的确定 (1)机械效率的计算确定 1)以功表示的计算公式
实际机械装置 理论机械装置
F0 vF
h0
h=Wr/Wd=1-Wf/Wd
2)以功率表示的计算公式
G0
vG
h = Pr /Pd=GvG /FvF
h=Pr/Pd=1-Pf/Pd
3)以力或力矩表示的计算公式 h=F0/F=M0/M=G/G0=Mr/Mr0 即
2)实验方法 实验时,可借助于磅秤测定出定子平衡杆的压力F来确定出 主动轴上的力矩M主, 即 M主=Fl。 同时,根据弹性梁上的千分表读数(即代表Q力)来确定 制动轮上的圆周力Ft=Q-G, 从而确定出从动轴上的力矩M从,
M从=FtR=(Q-G)R 该蜗杆的传动机构的效率公式为 η =P从/P主 =ω从M从/(ω主M主) =M从/(iM主) 式中 i为蜗杆传动的传动比。 对于正在设计和制造的机械,虽然不能直接用实验法测定其 机械效率,但是由于各种机械都不过是由一些常用机构组合而成 的,而这些常用机构的效率又是可通过实验积累的资料来预先估 定的(如表5-1 简单传动机构和运动副的效率)。 据此,可通过 计算确定出整个机械的效率。
0.94 0.94 0.42
解 机构1、2、3′ 及4′串联的部分
′ 4 )′ =5 kW/(0.982×0.962)=5.649 kW P′d=P′r /(η1η2η3 η 机构1、2、3" 、4"及5"串联的部分 " =Pr"/(η1η2η3 " "5 )" =0.2 kW/(0.982×0.942×0.42)=0.561 kW Pd η4 η 故该机械的总效率为 η = ∑Pr /∑Pd =(5+0.2) kW/(5.649+0.561) kW=0.837
机械原理第05章

ω:0↗ωm,
2、稳定运转阶段
1) ω=const——等速稳定运转 W=∆E=0,即在任一时间间隔内,Wd=Wc ; 条件:作用于机械上的力或力矩均为常矢。 2) ω= ω(t)= ω(t+T)——周期性的稳定运转 T——周期:完成一个运动循环所需的时 间。 运动循环:机器的运动状态(包括位移、 速度和加速度等)从某一原始值开始, 经过一个运动过程又变回到该原始值。 这个运动过程称为机器的一个运动循环。
上海海运大学专用
v
b、轴颈自锁的条件:α≤ρ 其中,α为作用于轴颈1上的外主动力
系的合力F离轴颈中心的O的距离; ρ为摩擦圆半径,如图5-9所示。 几何意义:轴颈自锁 的条件是:作用于 轴颈1上的外主动力 系的合力F的作用 线切于或割于摩擦 圆。
上海海运大学专用
图5-9
例1a
例1推导图5-10所示偏心夹具的自锁条件。 解 要求在夹紧工件并撤去 手柄力F后,保证偏心盘 不能松转。 显然,使偏心盘发生松转 的力是FR23 ,而FR23 是作 用在轴颈O上的主动外 力。由轴颈的自锁条件 知,应保证: a=s-s1≤ρ
1、串联 2、并联 3、混联
上海海运大学专用
1、串联
如图5-3所示为k个机器串联组成的机组。 设各机器的效率分别为η1、η2、…、ηk, 机组的输入功率为Pd,输出功率为Pr=Pk。 串联特点:前一机器的输出功率为后一机 器的输入功率。
图5-3
上海海运大学专用
<min(η1、η2、…、ηk)
P P P P 1 2 r η= = ⋅ ⋅ ⋅ k =η1η2 ⋅ ⋅ ⋅ηk P P P P −1 1 d d k
上海海运大学专用
3、停车阶段
Wc,输入功小于阻抗功。 为加速制动,一般都要撤去驱动力;有时, 还需另加制动力,以缩短停车时间。 机器运转三个阶段的主轴角速度的变化曲 线如图5-1所示。
机械原理教程全套课件.pdf
教材与学时安排总学时:48时内容讲授:36时习题讲解:12时20032003第一章绪论第二章机构的组成及其自由度的计算第三章平面机构的速度分析第四章机械的摩擦及机械效率第五章机械的平衡第六章机械的运转及其速度波动的调节第七章平面连杆机构及其设计第八章凸轮机构及其设计第九章齿轮机构及其设计第十章轮系第十一章其他常用机构第十二章机构的选型与组合目录第一章绪论§1-1本课程研究的对象及内容§1-2学习本课程的目的§1-3本课程的特点及学习时注意的几个问题思考题20032003§1-1 本课程研究的对象及内容1.研究对象机构是指一种用来传递与变换运动和力的可动装置。
机器是指一种执行机械运动装置,可用来变换和传递能量、物料和信息。
机械是机构和机器的总称。
机械应用实例机械应用实例仿生机械机车飞机汽车船舶内燃机工件自动装卸装置六自由度关节式工业机器人2003内燃机2003工件自动装卸装置2003六自由度关节式工业机器人控制系统示教板操作机2003蒸汽机车内燃机车电力机车2003汽车是指能自带能源的机动轮式无轨车辆,它是使用最广泛的交通运输工具。
按运输对象汽车可分为客运汽车和货运汽车(简称货车)两大类2003船舶船舶是指能航行或停泊于水域进行运输或作业工具,按不同的使用要求而具有不同的技术性能、装备和结构型式。
船舶在国防、国民经济和海洋开发等方面都占有十分重要的地位。
船舶从史前刳木为舟起,经历了独木舟和木板船时代,1879年世界上第一艘钢船问世后,又开始了以钢船为主的时代。
船舶的推进也由19世纪的依靠人力、畜力和风力(即撑篙、划桨、摇橹、拉纤和风帆)发展到使用机器驱动。
2003飞机2003焊接机器人主要研究:焊接机器人(把弧焊与点焊机器人作为负载不同的一个系列机器人,可兼作弧焊、点焊、搬运、装配、切割作业)产品的标准化、通用化、模块化、系列化设计。
弧焊机器人用激光视觉焊缝跟踪装置的开发:激光发射器的选用,CCD成象系统,视觉图象处理技术,视觉跟踪与机器人协调控制。