《机械原理》第五章习题轮系及其设计及答案
西工大教材-机械原理各章习题及答案
电动机所需的功率为
p = ρ • v /η = 5500 ×1.2 ×10−3 / 0.822 = 8.029(KW )
5-8 在图示斜面机构中,设已知摩擦面间的摩擦系数 f=0.2。求在 G 力作用下(反行程),此斜面 机构的临界自锁条件和在此条件下正行程(在 F 力作用下)的效率。 解 1)反行程的自锁条件 在外行程(图 a),根据滑块的平衡条件:
解 1 ) 取 比 例 尺 μ 1 = 1mm/mm 绘 制 机 构 运 动 简 图 ( 图 b )
(a)
2 )计算该机构的自由度
n=7
pι=9
ph=2(算齿轮副,因为凸轮与齿轮为一体) p’=
F’= F=3n-2pe-ph
=3x7-2x8-2 =1
G7
D 64 C
EF
3
9
B
2
8
A
ω1
b)
2-6 试计算如图所示各机构的自由度。图 a、d 为齿轮一连杆组合机构;图 b 为凸轮一连杆组合 机构(图中在 D 处为铰连在一起的两个滑块);图 c 为一精压机机构。并问在图 d 所示机构中, 齿轮 3 与 5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目是否相同?为什么?
C3 重合点继续求解。
解 1)速度分析(图 b)取重合点 B2 与 B3,有
方向 大小 ?
v vv vB3 = vB2 + vB3B2 ⊥ BD ⊥ AB // CD ω1lAB ?
D
C
3 d3
ω3
4
ω3 90°
2
B(B1、B2、B3)
ω1
A1 ϕ = 90°
机械原理-轮系集合例题

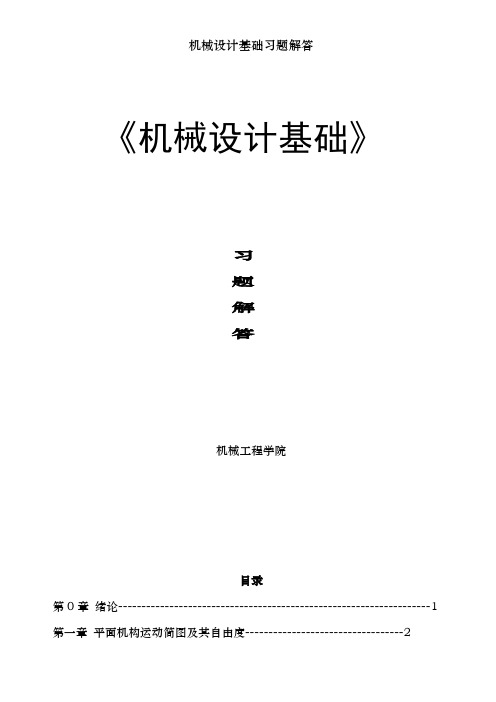
第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
机械设计基础第5章 轮系习题解答1
45 30 34 15 15 17
12
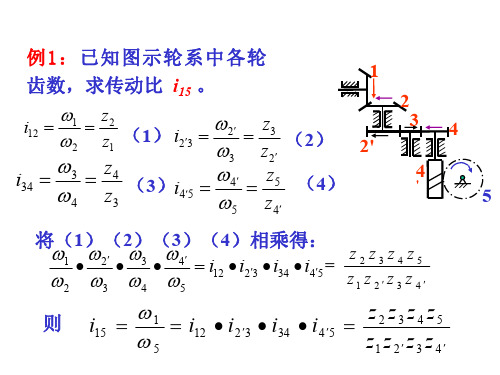
例2:在下图所示的轮系中,已知z1=20,z2=40,
z2'=20,z3=30,z4=80,试求传动比i1H。
解: i12
n1 n2
z2 z1
40 20
2
i2H4
n2 n4
nH nH
z4 z2
80 4 20
n2 n2
n4 0
联立求解得:
i1H
解: 将轮系分解
4 13
1-2为定轴轮系 2-2’共轴
2
H
H-4-3-2’为周转轮系
2’
定轴轮系: i12=ω1/ω2 =-z2/ z1
周转轮系: iH2’4=(1- i2’H) =-z4 /z2’
连接条件: ω2=ω2’
i12 • i2’HBiblioteka 联立解得 i1H1 H
z2 (1 z4 ) 40 (1 20) 10 z1 z2 20
n1 1 991909100
nH
1010000000
n1 19091909011 1100 1 nH 1100000 1010000000 100
iH 1
1 i1H
10100000
例题5.4:如图所示的轮系中 ,已知若 z1=20, z2=40,
z2’=20, z3=30,z4=80,试求传动比i1H。
z2=25,z2'=20,z3=75,齿轮1的转速为200r/min(箭头朝
上),齿轮3的转速为50r/min,求行星架转速的nH大小和
方向。
解: i13H
n1H n3 H
n1 nH n3 nH
z2z3 z1 z2
25 75 25 30 20 8
机械原理第五章答案

5.1解:(1)应满足杆长条件,且AD 必不为最短杆AD 为最长杆:c b d a +≤+,360280120+≤+d ,520360≤≤dAD 不为最长杆:d b c a +≤+,d +≤+280360120,200360≥d 所以,d 的取值范围为200mm ≤d ≤520mm(2)如果满足杆长条件,无论AD 如何取值均有曲柄存在,故本解中必不满足杆长条件 ①AD 为最长杆:(安装条件)c b a d ++≤, 760 dc bd a ++ ,360280120++ d ,520 d因此,760520 d <②AD 不是最长杆也不是最短杆:120=>a dd b c a ++ ,d ++280360120 , 200<d因此,200120<<d5.6解:(1)180180341.46618018034k θθ++===--(2)[]min 33γγ=<死点位置如图示。
5.15 解 1 1.251180180201 1.251k k θ--===++ (1)AC2=269.23mm ,AC1=127.95mm(2)取比例尺mm m L /002.0=μ根据已知条件可作出摇杆DC 的一个极限位置DC1,要进行图解还需找出摇杆的另一极限位置。
(3)以D 点为圆心,DC1为半径作圆弧S 。
连接AC1,作∠C1AC2=360,AC2线与圆弧S 可交于两点C2‘,则DC2(或DC2‘)皆为摇杆的另一极限位置。
(4)取摇杆的极限位置为DC1、DC2时,由图可得AC1=24,AC2=58,则1712=-=AC AC AB 412=-=AB AC BC5.8 解:分析:因为是转动导杆机构,ADP 又是对心的曲柄滑块机构,所以曲柄AD 的两个极位必在AP 线上,那么对于转动导杆机构而言,转动曲柄BC 的极位C1和C2也比在AP 线上。
(1)又因 3018011=+-=k k ϑ,两个极位的实际夹角应该是 150。
机械原理习题(参考)(1)
机械原理复习题绪论复习思考题1、试述构件和零件的区别与联系?2、何谓机架、原动件和从动件?第一章机械的结构分析复习思考题1、两构件构成运动副的特征是什么?2、如何区别平面及空间运动副?3、何谓自由度和约束?4、转动副与移动副的运动特点有何区别与联系?5、何谓复合铰链?计算机构自由度时应如何处理?6、机构具有确定运动的条件是什么?7、什么是虚约束?习题1、画出图示平面机构的运动简图,并计算其自由度。
(a)(b) (c)2、一简易冲床的初拟设计方案如图。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
3、计算图示平面机构的自由度;机构中的原动件用圆弧箭头表示。
(a) (b) (c)(d) (e) (f)第二章 平面机构的运动分析复习思考题1、已知作平面相对运动两构件上两个重合点的相对速度12A A V 及12B B V 的方向,它们的相对瞬心P 12在何处?2、当两构件组成滑动兼滚动的高副时,其速度瞬心在何处?3、如何考虑机构中不组成运动副的两构件的速度瞬心?4、利用速度瞬心,在机构运动分析中可以求哪些运动参数?5、在平面机构运动分析中,哥氏加速度大小及方向如何确定?习题1、试求出下列机构中的所有速度瞬心。
(a) (b)(c) (d)2、图示的凸轮机构中,凸轮的角速度ω1=10s-1,R=50mm,l A0=20mm,试求当φ=0°、45°及90°时,构件2的速度v。
题2图凸轮机构题3图组合机构3、图示机构,由曲柄1、连杆2、摇杆3及机架6组成铰链四杆机构,轮1′与曲柄1固接,其轴心为B,轮4分别与轮1′和轮5相切,轮5活套于轴D上。
各相切轮之间作纯滚动。
试用速度瞬心法确定曲柄1与轮5的角速比ω1/ω5。
4、在图示的颚式破碎机中,已知:x D=260mm,y D=480mm,x G=400mm,y G=200mm,l AB=l CE=100mm,l BC=l BE=500mm,l CD=300mm,l EF=400mm,l GF=685mm,ϕ1=45°,ω1=30rad/s 逆时针。
机械原理总复习题及解答第五章

第5章 齿轮机构及其设计5.1填空题5.1.1.按标准中心距安装的渐开线直齿圆柱标准齿轮,节圆与 重合,啮合角在数值上等于 上的压力角。
5.1.2.相啮合的一对直齿圆柱齿轮的渐开线齿廓,其接触点的轨迹是一条线。
5.1.3.渐开线上任意点的法线必定与基圆5.1.4.渐开线齿轮的可分性是指渐开线齿轮中心距安装略有误差时, 。
5.1.5.共轭齿廓是指一对 的齿廓。
5.1.6.用范成法加工渐开线直齿圆柱齿轮,发生根切的原因是 。
5.1.7.一对渐开线直齿圆柱标准齿轮传动,当齿轮的模数m 增大一倍时,其重合度 ,各齿轮的齿顶圆上的压力角a α ,各齿轮的分度圆齿厚s 。
5.1.8.在模数、齿数、压力角相同的情况下,正变位齿轮与标准齿轮相比较,下列参数的变化是:齿厚 ;基圆半径 ;齿根高 。
5.1.9.一个负变位渐开线直齿圆柱齿轮同除变位系数外的其它基本参数均相同的标准齿轮相比较,其 圆及 圆变小了,而 圆及 圆的大小则没有变。
5.1.10.斜齿轮在 上具有标准数和标准压力角。
5.1.11.一对斜齿圆柱齿轮传动的重合度由 两部分组成,斜齿轮的当量齿轮是指 的直齿轮。
5. 2判断题5.2.1.一对外啮合的直齿圆柱标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。
( )5.2.2.一对渐开线直齿圆柱齿轮的正确啮合条件是2b 1b p p =。
( )5.2.3.一对能正确啮合传动的渐开线直齿圆柱齿轮,其啮合角一定为20°。
( )5.2.4.一对直齿圆柱齿轮啮合传动,模数越大,重合度也越大。
( )5.2.5.一对相互啮合的直齿圆柱齿轮的安装中心距加大时,其分度圆压力角也随之加大。
( )5.2.6.标准直齿圆柱齿轮传动的实际中心距恒等于标准中心距。
( )5.2.7.渐开线直齿圆柱齿轮同一基圆的两同向渐开线为等距线。
( )5.2.8.一个渐开线圆柱外齿轮,当基圆大于齿根圆时,基圆以内部分的齿廓曲线,都不是渐开线。
机械设计基础习题解答
《机械设计基础》习题解答机械工程学院目录第0章绪论-------------------------------------------------------------------1第一章平面机构运动简图及其自由度----------------------------------2第二章平面连杆机构---------------------------------------------------------4第三章凸轮机构-------------------------------------------------------------6第四章齿轮机构------------------------------------------------------- -----8第五章轮系及其设计------------------------------------------------------19第六章间歇运动机构------------------------------------------------------26第七章机械的调速及平衡------------------------------------------------29第八章带传动---------------------------------------------------------------34第九章链传动---------------------------------------------------------------38第十章联接------------------------------------------------------------------42第十一章轴------------------------------------------------------------------46第十二章滚动轴承---------------------------------------------------------50第十三章滑动轴承-------------------------------------------------------- 56第十四章联轴器和离合器------------------------------- 59第十五章弹簧------------------------------------------62第十六章机械传动系统的设计----------------------------65第0章绪论0-1机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
机械设计第五章课后习题答案

5-1解:蜗轮 2和蜗轮3的转向如图粗箭头所示,即和。
图 5.5图5.6 5-2解:这是一个定轴轮系,依题意有:齿条 6 的线速度和齿轮5 ′分度圆上的线速度相等;而齿轮5 ′的转速和齿轮 5 的转速相等,因此有:通过箭头法判断得到齿轮5 ′的转向顺时针,齿条 6 方向水平向右。
5-3解:秒针到分针的传递路线为: 6→5→4→3,齿轮3上带着分针,齿轮6上带着秒针,因此有:。
分针到时针的传递路线为:9→10→11→12,齿轮9上带着分针,齿轮12上带着时针,因此有:。
图 5.7图5.85-4解:从图上分析这是一个周转轮系,其中齿轮 1、3为中心轮,齿轮2为行星轮,构件为行星架。
则有:∵∴∴当手柄转过,即时,转盘转过的角度,方向与手柄方向相同。
5-5解:这是一个周转轮系,其中齿轮 1、3为中心轮,齿轮2、2′为行星轮,构件为行星架。
则有:∵,∴∴传动比为10,构件与的转向相同。
图 5.9 图5.105-6解:这是一个周转轮系,其中齿轮 1为中心轮,齿轮2为行星轮,构件为行星架。
则有:∵,,∵∴∴5-7解:这是由四组完全一样的周转轮系组成的轮系,因此只需要计算一组即可。
取其中一组作分析,齿轮 4、3为中心轮,齿轮2为行星轮,构件1为行星架。
这里行星轮2是惰轮,因此它的齿数与传动比大小无关,可以自由选取。
(1)由图知(2)又挖叉固定在齿轮上,要使其始终保持一定的方向应有:(3)联立( 1)、(2)、(3)式得:图 5.11 图5.125-8解:这是一个周转轮系,其中齿轮 1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵,∴∴与方向相同5-9解:这是一个周转轮系,其中齿轮 1、3为中心轮,齿轮2、2′为行星轮,为行星架。
∵设齿轮 1方向为正,则,∴∴与方向相同图 5.13图5.145-10解:这是一个混合轮系。
其中齿轮 1、2、2′3、组成周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,为行星架。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章轮系及其设计
习题
5-2在题图5_2所示的手摇提升装置中,已知各轮齿数为:zι=20, Z2=50, Z3=15, z*30, Z6=40, Z7=18,
Z8=51,蜗杆Z5=1,右旋,试求传动比i18并确定提升重物时手柄的转向。
P
题图5-2
50x30x40
20x15x1
方向:从左往右看为顺时针方向0
5-5在题图5-5所示的压榨机中,螺杆4和5为一对旋向相反的螺杆,其螺距分别为6mm和3mm ,螺杆5旋在螺杆4内,螺杆4与齿轮3固联在一起,螺杆5与盘B固联在一起,盘B插在框架两侧的槽内只能沿框架上下移动。
已知各轮齿数为Z I=18, Z2=24,Z2=24, Z3=64,试求为使盘B下降19mm ,轴A应转多少转,转向如何?
题图5-5
答案:7.5转!
5-6题图5-6所示为手动起重葫芦,已知zι=Z2=10, Z2=20, Z3=40。
设由链轮A至链轮B的传动效率为=0. 9 ,为了能提升Q =IoooN的重物,求必须加在链轮A上的圆周力P。
题圏
4・6答案:求出A, E两轮的转速比J Z ABf即什
次轮系为行星轮系,中心轮1, 3,行星轮2-2S系杆为4. η= 0.
Λz13H= 6⅛ -H4)/(∏3 —?tf)= (-1)1ZJZ3 / ZIZ^
即(nl -n4) / (OF) = —20X40/IOXIO P
114 =YlI /Yl4= 9 +j
y =Q XV Q ∕PXV P y=Q Xr B Xn4 /P Xr A Xn“
0. 9=1000×40/PX 160 ×9 W
P=1000X40/ 160X0. 9X9=30” 86(N >
5-7题图5-7所示为一灯具的转动装置,已知:nι=19.5r∕min ,方向如图示,各轮齿数为Z i =60,Z^=Z^=30, Z3= Z4=40,Z5=120°求灯具箱体的转速及转向。
题囹几U
解:该轮系为一行星轮系,其中齿轮1 和5为中心轮,箱体为系杆,其它齿轮均为行星轮•
n - —-6.5r / min
5-11在题图5-11所示的三爪电动卡盘的传动轮系中,各轮齿数为
动比i14。
<>
2
V
l⅛⅛⅝
H
E
O
J 4
r I U
z1=6,z2=z2 =25,z3=57,Z4=56,求传
A<ι A⅛
题图5-11
H >棒化为定轴轮系•
对1-2-3-H 可得:
^=I-C=I÷≡ = 10.5
斗I
对 3-2-21-4-H 可得:
—=i H 、i - 10.5 X (-56)
Ii 村 IM % Jr
ω 4 轮1与轮4转向相反.
5-12在题图5-12所示的自行车里程表机构中, C 为车轮轴,P 为里程表指针。
已知各轮齿数为 z ι=17,
Z3=23, Z4=19, z√=20,Z5=24°设轮胎受压变形后车轮的有效直径为 0.7m ,当自行车行驶Ikm 时,表上的指 针刚好回转一周。
试求齿轮 2的齿数。
题图5-12^
解:该轮系为3K-H 型周转轮系,固定系杆
所以i =巴=么
It 5 5
= -588
1 專金:⅛ft4n⅛ Ikm⅛,轮於转
¢1 Ih -10∞Z0* 7 «=/?? , AC⅛Λ5=1 r
⅛⅛⅛⅛复金轮糸F / F 2⅛⅛⅛⅛轮糸:3, 4 - 4\ 5, 2 fH) ⅛⅛e<⅛⅜.
62 =∕υ½υ= -z:/ZI= - z: /17
i£ =WE)/Igfh)=f- N 0 Z4×Z5Zz3×Zr ,∏j- 0
=19X24/ C23 X 20J
心∕⅛= 1/114
® r3L f 束出Z; t
5-13在题图5-13所示的双螺旋桨飞机的减速器中,已知zι=26, z∑=20, Z4=30, Z5=18, nι=15000r∕min , 求螺旋桨P、Q的转速n p、n Q及转向。
5-16题图5-16所示的减速器中,已知蜗杆1和5的头数均为1,蜗杆1为左旋,蜗杆5为右旋,各轮齿数为Z1=101,Z2=99,Z2 =Z4,Z4=100,Z5 =100。
1)试求传动比i1H。
2)若主动蜗杆1由转速为1375r∕min的电动机带动,问输出轴H转一周需要多长时间?
题图5二6
1t 5 \ 5, 4⅛⅛⅛轴轮系F
2> 2 3 34, H ( ±ia+⅞)构硯差动轮系•
由 1 1 2 可得;t]i=∩ι n; = Z-Zi =e> tι1=nι ??
由几5* 5 > 疔可得:i14= Hi Ik = ZrX Zi- zι× ¾
∣=^> π⅛ = IOlnj I(XXX)
通过利走,址,g的转动方向相同,如囹中所示(是在假定螺杆彳顺时针转动时)
5^-∕H2- = rt; t n尸H4T ,
在差动轮系中•有i;-<KS=Cnr- ΛH) ∏H)二一,
即有(址-t⅛) Z (IU —t⅛) = - 1 ・
1-=_a (n) ⅛9) - ∏H=t⅛- IolflJ Ioooo r A i-H= n; EIH= 2x9?(X)O C:195⅛9⅞f9⅛
2 ) ■/ Im=Ill ilH=9⅛------- I tlK=1375∕99s¾5 IXt inm)
Λ⅛⅛H⅜⅞ —周斫用的时闾知60 14=⅛4⅛r) 即每转犬约需丄^秒.
5-18 题图5-18所示的变速器,已知zι= ZI=Z6=28, Z^ zs=Z3:=80, z2=z4= z7=26,当鼓轮A、B、C分别被制动时,求传动比i1H O
解:刹住鼓轮A时,1> 2、3 (H)组成走轴轮系。
有
20
a,
刹住前轮B时,1、4、5、H组成行星轮系。
有
刹住裁轮3时,该轮系由差动轮系U 4. 5. H利亍星轮系沐讥氷5 (行星架) 组成。
在差动轮系1、4 5, H中,有
题图5/8
在行星轮系3、讥眾首中,有
=X J a L
联立求解
得
4"
"T ⅛
-l z2
80。