09-Proximity-Transducer-Operation
西南财大学术期刊等级分类目录
西南财经大学学术期刊等级分类
进行分级认定。 2.期刊分级。以 JCR 为依据,将英文期刊目录分为 A 级、B 级
(含学科 B 级)和 C 级。 (1)A 级期刊。A 级为国际公认顶级学术期刊,其影响因子排名
为所属学科前 8%的期刊。 (2)B 级期刊。B 级为国际知名学术期刊,其影响因子排名为所
学术期刊等级分类目录
(2013 年版)
西南财经大学科研处 编印 二〇一三年五月
西南财经大学学术期刊等级分类
根据《西南财经大学教师教学科研社会服务成果认定标准及奖励 办法》(西财大办[2013]3 号)中关于期刊分类与分级标准的相关规定, 编制《西南财经大学学术期刊等级分类目录(2013 版)》。
西南财经大学科研处 2013 年 5 月
3.同时被不同学科收录的少数期刊,按照影响因子排名的就高 原则进行认定。
三、中、英文期刊等级调整原则 在每类每级期刊数量保持不变的前提下,可进行适当调整。按照 有上有下的原则进行等量置换。英文类期刊置换原则上须满足上调的 期刊影响力大于下调的期刊的影响力,CSSCI 期刊须就上调期刊的影 响力给出充分理由,CSCD 期刊原则上须满足上调期刊的 H 指数大于 下调期刊的 H 指数。
1
西南财经大学学术期刊等级分类
期刊分类与分级标准
一、中文期刊分类与分级 1.基本依据。人文社会科学类期刊以南京大学社会科学评价中 心发布的中文社会科学索引(2012-2013 版,简称 CSSCI)为基本依据, 自然科学类期刊以中国科学院文献情报中心与中国学术期刊电子杂 志社联合开发的中国科学引文数据库(2011-2012 版,简称 CSCD)为 基本依据。 2.中文期刊分级 (1)A 级期刊。所属学科排名前 10%的期刊。如果某学科期刊少 于 10 本,则排名第一的为 A 级期刊。 (2)B1 级期刊。所属学科排名前 50%但未进入前 10%的期刊。 (3)B2 级期刊。未进入 A 级和 B1 级的 CSSCI 和 CSCD 学术期 刊以及北京大学图书馆《中文核心期刊要目总览》的学术期刊。 3.中文 B1 级及以上期刊的英文版作为同级别中文期刊予以认 定。被《新华文摘》全文转载的学术论文,视同 A 级学术论文予以 认定。 4.综合性社科期刊分类中除《中国社会科学》作为 A 级期刊外, 只遴选保留 5 本学术性较强的期刊作为 B1 级期刊,其余期刊均作为 B2 级期刊。 5.民族学与文化学类期刊中,保留《民族研究》作为 A 级期刊, 不设置 B1 级期刊,其余均为 B2 级。 6.遵从我校期刊目录惯例,高校综合性学报不设 A 级期刊,只 设 10 本 B1 级期刊。 二、英文期刊分类与分级 1.基本依据。采用 Thomson-ISI 发布的国际公认的《期刊引证 分析报告(JCR)》(含自然科学版 SCI 和社会科学版 SSCI),按照其 学科分类体系,主要根据收录期刊影响因子大小(非唯一考量因素)
IATA AHM目录
Airport Handling ManualEffective 1 January—31 December 201838NOTICEDISCLAIMER. The information contained in thispublication is subject to constant review in the lightof changing government requirements and regula-tions. No subscriber or other reader should act onthe basis of any such information without referringto applicable laws and regulations and/or withouttak ing appropriate professional advice. Althoughevery effort has been made to ensure accuracy, theInternational Air Transport Association shall not beheld responsible for any loss or damage caused byerrors, omissions, misprints or misinterpretation ofthe contents hereof. Furthermore, the InternationalAir Transport Association expressly disclaims anyand all liability to any person or entity, whether apurchaser of this publication or not, in respect ofanything done or omitted, and the consequencesof anything done or omitted, by any such person orentity in reliance on the contents of this publication.Opinions expressed in advertisements appearing inthis publication are the advertiser’s opinions and donot necessarily reflect those of IATA. The mentionof specific companies or products in advertisementdoes not imply that they are endorsed or recom-mended by IATA in preference to others of a simi-lar nature which are not mentioned or advertised.© International Air Transport Association. AllRights Reserved. No part of this publication maybe reproduced, recast, reformatted or trans-mitted in any form by any means, electronic ormechanical, including photocopying, record-ing or any information storage and retrieval sys-tem, without the prior written permission from:Senior Vice PresidentAirport, Passenger, Cargo and SecurityInternational Air Transport Association800 Place VictoriaP.O. Box 113Montreal, QuebecCANADA H4Z 1M1Airport Handling ManualMaterial No.: 9343-38ISBN 978-92-9229-505-9© 2017 International Air Transport Association. All rights reserved.TABLE OF CONTENTSPage Preface (xv)Introduction (xvii)General (1)AHM001Chapter0—Record of Revisions (1)AHM011Standard Classification and Numbering for Members Airport Handling Manuals (2)AHM012Office Function Designators for Airport Passenger and Baggage Handling (30)AHM020Guidelines for the Establishment of Airline Operators Committees (31)AHM021Guidelines for Establishing Aircraft Ground Times (34)AHM050Aircraft Emergency Procedures (35)AHM070E-Invoicing Standards (53)Chapter1—PASSENGER HANDLING (91)AHM100Chapter1—Record of Revisions (91)AHM110Involuntary Change of Carrier,Routing,Class or Type of Fare (92)AHM112Denied Boarding Compensation (98)AHM120Inadmissible Passengers and Deportees (99)AHM140Items Removed from a Passenger's Possession by Security Personnel (101)AHM141Hold Loading of Duty-Free Goods (102)AHM170Dangerous Goods in Passenger Baggage (103)AHM176Recommendations for the Handling of Passengers with Reduced Mobility(PRM) (105)AHM176A Acceptance and Carriage of Passengers with Reduced Mobility(PRM) (106)AHM180Carriage of Passengers with Communicable Diseases (114)AHM181General Guidelines for Passenger Agents in Case of SuspectedCommunicable Disease (115)Chapter2—BAGGAGE HANDLING (117)AHM200Chapter2—Record of Revisions (117)AHM210Local Baggage Committees (118)AHM211Airport Operating Rules (124)Airport Handling ManualPageChapter2—BAGGAGE HANDLING(continued)AHM212Interline Connecting Time Intervals—Passenger and Checked Baggage (126)AHM213Form of Interline Baggage Tags (128)AHM214Use of the10Digit Licence Plate (135)AHM215Found and Unclaimed Checked Baggage (136)AHM216On-Hand Baggage Summary Tag (138)AHM217Forwarding Mishandled Baggage (139)AHM218Dangerous Goods in Passengers'Baggage (141)AHM219Acceptance of Firearms and Other Weapons and Small Calibre Ammunition (142)AHM221Acceptance of Power Driven Wheelchairs or Other Battery Powered Mobility Aidsas Checked Baggage (143)AHM222Passenger/Baggage Reconciliation Procedures (144)AHM223Licence Plate Fallback Sortation Tags (151)AHM224Baggage Taken in Error (154)AHM225Baggage Irregularity Report (156)AHM226Tracing Unchecked Baggage and Handling Damage to Checked and UncheckedBaggage (159)AHM230Baggage Theft and Pilferage Prevention (161)AHM231Carriage of Carry-On Baggage (164)AHM232Handling of Security Removed Items (168)AHM240Baggage Codes for Identifying ULD Contents and/or Bulk-Loaded Baggage (169)Chapter3—CARGO/MAIL HANDLING (171)AHM300Chapter3—Record of Revisions (171)AHM310Preparation for Loading of Cargo (172)AHM311Securing of Load (174)AHM312Collection Sacks and Bags (177)AHM320Handling of Damaged Cargo (178)AHM321Handling of Pilfered Cargo (179)AHM322Handling Wet Cargo (180)AHM330Handling Perishable Cargo (182)AHM331Handling and Protection of Valuable Cargo (184)AHM332Handling and Stowage of Live Animals (188)AHM333Handling of Human Remains (190)Table of ContentsPageChapter3—CARGO/MAIL HANDLING(continued)AHM340Acceptance Standards for the Interchange of Transferred Unit Load Devices (191)AHM345Handling of Battery Operated Wheelchairs/Mobility AIDS as Checked Baggage (197)AHM350Mail Handling (199)AHM351Mail Documents (203)AHM353Handling of Found Mail (218)AHM354Handling of Damaged Mail (219)AHM355Mail Security (220)AHM356Mail Safety (221)AHM357Mail Irregularity Message (222)AHM360Company Mail (224)AHM380Aircraft Documents Stowage (225)AHM381Special Load—Notification to Captain(General) (226)AHM382Special Load—Notification to Captain(EDP Format and NOTOC Service) (231)AHM383Special Load—Notification to Captain(EDP NOTOC Summary) (243)AHM384NOTOC Message(NTM) (246)Chapter4—AIRCRAFT HANDLING AND LOADING (251)AHM400Chapter4—Record of Revisions (251)AHM411Provision and Carriage of Loading Accessories (252)AHM420Tagging of Unit Load Devices (253)AHM421Storage of Unit Load Devices (263)AHM422Control of Transferred Unit Load Devices (268)AHM423Unit Load Device Stock Check Message (273)AHM424Unit Load Device Control Message (275)AHM425Continued Airworthiness of Unit Load Devices (279)AHM426ULD Buildup and Breakdown (283)AHM427ULD Transportation (292)AHM430Operating of Aircraft Doors (295)AHM431Aircraft Ground Stability—Tipping (296)AHM440Potable Water Servicing (297)AHM441Aircraft Toilet Servicing (309)Airport Handling ManualPageChapter4—AIRCRAFT HANDLING AND LOADING(continued)AHM450Standardisation of Gravity Forces against which Load must be Restrained (310)AHM451Technical Malfunctions Limiting Load on Aircraft (311)AHM453Handling/Bulk Loading of Heavy Items (312)AHM454Handling and Loading of Big Overhang Items (313)AHM455Non CLS Restrained ULD (316)AHM460Guidelines for Turnround Plan (323)AHM462Safe Operating Practices in Aircraft Handling (324)AHM463Safety Considerations for Aircraft Movement Operations (337)AHM465Foreign Object Damage(FOD)Prevention Program (340)Chapter5—LOAD CONTROL (343)AHM500Chapter5—Record of Revisions (343)AHM501Terms and Definitions (345)AHM503Recommended Requirements for a New Departure Control System (351)AHM504Departure Control System Evaluation Checklist (356)AHM505Designation of Aircraft Holds,Compartments,Bays and Cabin (362)AHM510Handling/Load Information Codes to be Used on Traffic Documents and Messages (368)AHM513Aircraft Structural Loading Limitations (377)AHM514EDP Loading Instruction/Report (388)AHM515Manual Loading Instruction/Report (404)AHM516Manual Loadsheet (416)AHM517EDP Loadsheet (430)AHM518ACARS Transmitted Loadsheet (439)AHM519Balance Calculation Methods (446)AHM520Aircraft Equipped with a CG Targeting System (451)AHM530Weights for Passengers and Baggage (452)AHM531Procedure for Establishing Standard Weights for Passengers and Baggage (453)AHM533Passengers Occupying Crew Seats (459)AHM534Weight Control of Load (460)AHM536Equipment in Compartments Procedure (461)AHM537Ballast (466)Table of ContentsPageChapter5—LOAD CONTROL(continued)AHM540Aircraft Unit Load Device—Weight and Balance Control (467)AHM550Pilot in Command's Approval of the Loadsheet (468)AHM551Last Minute Changes on Loadsheet (469)AHM561Departure Control System,Carrier's Approval Procedures (471)AHM562Semi-Permanent Data Exchange Message(DEM) (473)AHM564Migration from AHM560to AHM565 (480)AHM565EDP Semi-Permanent Data Exchange for New Generation Departure Control Systems (500)AHM570Automated Information Exchange between Check-in and Load Control Systems (602)AHM571Passenger and Baggage Details for Weight and Balance Report(PWR) (608)AHM580Unit Load Device/Bulk Load Weight Statement (613)AHM581Unit Load Device/Bulk Load Weight Signal (615)AHM583Loadmessage (619)AHM587Container/Pallet Distribution Message (623)AHM588Statistical Load Summary (628)AHM590Load Control Procedures and Loading Supervision Responsibilities (631)AHM591Weight and Balance Load Control and Loading Supervision Training and Qualifications (635)Chapter6—MANAGEMENT AND SAFETY (641)AHM600Chapter6—Record of Revisions (641)AHM610Guidelines for a Safety Management System (642)AHM611Airside Personnel:Responsibilities,Training and Qualifications (657)AHM612Airside Performance Evaluation Program (664)AHM615Quality Management System (683)AHM616Human Factors Program (715)AHM619Guidelines for Producing Emergency Response Plan(s) (731)AHM620Guidelines for an Emergency Management System (733)AHM621Security Management (736)AHM633Guidelines for the Handling of Emergencies Requiring the Evacuation of an Aircraft During Ground Handling (743)AHM650Ramp Incident/Accident Reporting (745)AHM652Recommendations for Airside Safety Investigations (750)AHM660Carrier Guidelines for Calculating Aircraft Ground Accident Costs (759)Airport Handling ManualChapter7—AIRCRAFT MOVEMENT CONTROL (761)AHM700Chapter7—Record of Revisions (761)AHM710Standards for Message Formats (762)AHM711Standards for Message Corrections (764)AHM730Codes to be Used in Aircraft Movement and Diversion Messages (765)AHM731Enhanced Reporting on ATFM Delays by the Use of Sub Codes (771)AHM780Aircraft Movement Message (774)AHM781Aircraft Diversion Message (786)AHM782Fuel Monitoring Message (790)AHM783Request Information Message (795)AHM784Gate Message (797)AHM785Aircraft Initiated Movement Message(MVA) (802)AHM790Operational Aircraft Registration(OAR)Message (807)Chapter8—GROUND HANDLING AGREEMENTS (811)AHM800Chapter8—Record of Revisions (811)AHM801Introduction to and Comments on IATA Standard Ground Handling Agreement(SGHA) (812)AHM803Service Level Agreement Example (817)AHM810IATA Standard Ground Handling Agreement (828)AHM811Yellow Pages (871)AHM813Truck Handling (872)AHM815Standard Transportation Documents Service Main Agreement (873)AHM817Standard Training Agreement (887)AHM830Ground Handling Charge Note (891)AHM840Model Agreement for Electronic Data Interchange(EDI) (894)Chapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS (911)AHM900Chapter9—Record of Revisions (911)AHM901Functional Specifications (914)AHM904Aircraft Servicing Points and System Requirements (915)AIRBUS A300B2320-/B4/C4 (917)A300F4-600/-600C4 (920)A310–200/200C/300 (926)A318 (930)A319 (933)Table of ContentsPageChapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS(continued) AHM904Aircraft Doors,Servicing Points and System Requirements for the Use of Ground Support Equipment(continued)A320 (936)A321 (940)A330-200F (943)A330-300 (948)A340-200 (951)A340-300 (955)A340-500 (959)A340-600 (962)Airbus350900passenger (965)AIRBUS A380-800/-800F (996)ATR42100/200 (999)ATR72 (1000)AVRO RJ70 (1001)AVRO RJ85 (1002)AVRO RJ100 (1003)B727-200 (1004)B737–200/200C (1008)B737-300,400,-500 (1010)B737-400 (1013)B737-500 (1015)B737-600,-700,-700C (1017)B737-700 (1020)B737-800 (1022)B737-900 (1026)B747–100SF/200C/200F (1028)B747–400/400C (1030)B757–200 (1038)B757–300 (1040)Airport Handling ManualPageChapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS(continued) AHM904Aircraft Doors,Servicing Points and System Requirements for the Use of Ground Support Equipment(continued)B767—200/200ER (1041)B767—300/300ER (1044)B767—400ER (1048)B777–200/200LR (1051)B777–300/300ER (1055)Boeing787800passenger (1059)BAe ATP(J61) (1067)Bombardier CS100 (1068)Bombardier CS300 (1072)CL-65(CRJ100/200) (1076)DC8–40/50F SERIES (1077)DC8–61/61F (1079)DC8–62/62F (1081)DC8–63/63F (1083)DC9–15/21 (1085)DC9–32 (1086)DC9–41 (1087)DC9–51 (1088)DC10–10/10CF (1089)DC10–30/40,30/40CF (1091)EMBRAER EMB-135Regional Models (1092)EMBRAER EMB-145Regional Models (1094)Embraer170 (1096)Embraer175 (1098)Embraer190 (1100)Embraer195 (1102)FOKKER50(F27Mk050) (1104)FOKKER50(F27Mk0502) (1106)Chapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS(continued) AHM904Aircraft Doors,Servicing Points and System Requirements for the Use of Ground Support Equipment(continued)FOKKER70(F28Mk0070) (1108)FOKKER100(F28Mk0100) (1110)FOKKER100(F28Mk0100) (1112)IL-76T (1114)MD-11 (1116)MD–80SERIES (1118)SAAB2000 (1119)SAAB SF-340 (1120)TU-204 (1122)AHM905Reference Material for Civil Aircraft Ground Support Equipment (1125)AHM905A Cross Reference of IATA Documents with SAE,CEN,and ISO (1129)AHM909Summary of Unit Load Device Capacity and Dimensions (1131)AHM910Basic Requirements for Aircraft Ground Support Equipment (1132)AHM911Ground Support Equipment Requirements for Compatibility with Aircraft Unit Load Devices (1136)AHM912Standard Forklift Pockets Dimensions and Characteristics for Forkliftable General Support Equipment (1138)AHM913Basic Safety Requirements for Aircraft Ground Support Equipment (1140)AHM914Compatibility of Ground Support Equipment with Aircraft Types (1145)AHM915Standard Controls (1147)AHM916Basic Requirements for Towing Vehicle Interface(HITCH) (1161)AHM917Basic Minimum Preventive Maintenance Program/Schedule (1162)AHM920Functional Specification for Self-Propelled Telescopic Passenger Stairs (1164)AHM920A Functional Specification for Towed Passenger Stairs (1167)AHM921Functional Specification for Boarding/De-Boarding Vehicle for Passengers withReduced Mobility(PRM) (1169)AHM922Basic Requirements for Passenger Boarding Bridge Aircraft Interface (1174)AHM923Functional Specification for Elevating Passenger Transfer Vehicle (1180)AHM924Functional Specification for Heavy Item Lift Platform (1183)AHM925Functional Specification for a Self-Propelled Conveyor-Belt Loader (1184)AHM925A Functional Specification for a Self-Propelled Ground Based in-Plane LoadingSystem for Bulk Cargo (1187)Chapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS(continued) AHM925B Functional Specification for a Towed Conveyor-Belt Loader (1190)AHM926Functional Specification for Upper Deck Catering Vehicle (1193)AHM927Functional Specification for Main Deck Catering Vehicle (1197)AHM930Functional Specification for an Upper Deck Container/Pallet Loader (1201)AHM931Functional Specification for Lower Deck Container/Pallet Loader (1203)AHM932Functional Specification for a Main Deck Container/Pallet Loader (1206)AHM933Functional Specification of a Powered Extension Platform to Lower Deck/Container/ Pallet Loader (1209)AHM934Functional Specification for a Narrow Body Lower Deck Single Platform Loader (1211)AHM934A Functional Specification for a Single Platform Slave Loader Bed for Lower DeckLoading Operations (1213)AHM936Functional Specification for a Container Loader Transporter (1215)AHM938Functional Specification for a Large Capacity Freighter and Combi Aircraft TailStanchion (1218)AHM939Functional Specification for a Transfer Platform Lift (1220)AHM941Functional Specification for Equipment Used for Establishing the Weight of aULD/BULK Load (1222)AHM942Functional Specification for Storage Equipment Used for Unit Load Devices (1224)AHM950Functional Specification for an Airport Passenger Bus (1225)AHM951Functional Specification for a Crew Transportation Vehicle (1227)AHM953Functional Specifications for a Valuable Cargo Vehicle (1229)AHM954Functional Specification for an Aircraft Washing Machine (1230)AHM955Functional Specification for an Aircraft Nose Gear Towbar Tractor (1232)AHM956Functional Specification for Main Gear Towbarless Tractor (1235)AHM957Functional Specification for Nose Gear Towbarless Tractor (1237)AHM958Functional Specification for an Aircraft Towbar (1240)AHM960Functional Specification for Unit Load Device Transport Vehicle (1242)AHM961Functional Specification for a Roller System for Unit Load Device Transportation on Trucks (1245)AHM962Functional Specification for a Rollerised Platform for the Transportation of Twenty Foot Unit Load Devices that Interfaces with Trucks Equipped to Accept Freight ContainersComplying with ISO668:1988 (1247)AHM963Functional Specification for a Baggage/Cargo Cart (1249)AHM965Functional Specification for a Lower Deck Container Turntable Dolly (1250)AHM966Functional Specification for a Pallet Dolly (1252)Chapter9—AIRPORT HANDLING GROUND SUPPORT EQUIPMENT SPECIFICATIONS(continued) AHM967Functional Specification for a Twenty Foot Unit Load Device Dolly (1254)AHM968Functional Specification for Ramp Equipment Tractors (1256)AHM969Functional Specification for a Pallet/Container Transporter (1257)AHM970Functional Specification for a Self-Propelled Potable Water Vehicle with Rear orFront Servicing (1259)AHM971Functional Specification for a Self-Propelled Lavatory Service Vehicle with Rear orFront Servicing (1262)AHM972Functional Specifications for a Ground Power Unit for Aircraft Electrical System (1265)AHM973Functional Specification for a Towed Aircraft Ground Heater (1269)AHM974Functional Specification for Aircraft Air Conditioning(Cooling)Unit (1272)AHM975Functional Specifications for Self-Propelled Aircraft De-Icing/Anti-Icing Unit (1274)AHM976Functional Specifications for an Air Start Unit (1278)AHM977Functional Specification for a Towed De-Icing/Anti-Icing Unit (1280)AHM978Functional Specification for a Towed Lavatory Service Cart (1283)AHM979Functional Specification for a Towed Boarding/De-Boarding Device for Passengers with Reduced Mobility(PRM)for Commuter-Type Aircraft (1285)AHM980Functional Specification for a Self-Propelled Petrol/Diesel Refueling Vehicle forGround Support Equipment (1287)AHM981Functional Specification for a Towed Potable Water Service Cart (1289)AHM990Guidelines for Preventative Maintenance of Aircraft Towbars (1291)AHM994Criteria for Consideration of the Investment in Ground Support Equipment (1292)AHM995Basic Unit Load Device Handling System Requirements (1296)AHM997Functional Specification for Sub-Freezing Aircraft Air Conditioning Unit (1298)Chapter10—ENVIRONMENTAL SPECIFICATIONS FOR GROUND HANDLING OPERATIONS (1301)AHM1000Chapter10—Record of Revisions (1301)AHM1001Environmental Specifications for Ground Handling Operations (1302)AHM1002Environmental Impact on the Use of Ground Support Equipment (1303)AHM1003GSE Environmental Quality Audit (1305)AHM1004Guidelines for Calculating GSE Exhaust Emissions (1307)AHM1005Guidelines for an Environmental Management System (1308)Chapter11—GROUND OPERATIONS TRAINING PROGRAM (1311)AHM1100Chapter11—Record of Revisions (1311)AHM1110Ground Operations Training Program (1312)Appendix A—References (1347)Appendix B—Glossary (1379)Alphabetical List of AHM Titles (1387)IATA Strategic Partners..............................................................................................................................SP–1。
MIPS芯片架构说明
MIPS32™ Architecture For Programmers Volume I: Introduction to the MIPS32™ArchitectureDocument Number: MD00082Revision 2.00June 8, 2003MIPS Technologies, Inc.1225 Charleston RoadMountain View, CA 94043-1353Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Copyright ©2001-2003 MIPS Technologies, Inc. All rights reserved.Unpublished rights (if any) reserved under the copyright laws of the United States of America and other countries.This document contains information that is proprietary to MIPS Technologies, Inc. ("MIPS Technologies"). Any copying,reproducing,modifying or use of this information(in whole or in part)that is not expressly permitted in writing by MIPS Technologies or an authorized third party is strictly prohibited. At a minimum, this information is protected under unfair competition and copyright laws. Violations thereof may result in criminal penalties and fines.Any document provided in source format(i.e.,in a modifiable form such as in FrameMaker or Microsoft Word format) is subject to use and distribution restrictions that are independent of and supplemental to any and all confidentiality restrictions. UNDER NO CIRCUMSTANCES MAY A DOCUMENT PROVIDED IN SOURCE FORMAT BE DISTRIBUTED TO A THIRD PARTY IN SOURCE FORMAT WITHOUT THE EXPRESS WRITTEN PERMISSION OF MIPS TECHNOLOGIES, INC.MIPS Technologies reserves the right to change the information contained in this document to improve function,design or otherwise.MIPS Technologies does not assume any liability arising out of the application or use of this information, or of any error or omission in such information. Any warranties, whether express, statutory, implied or otherwise, including but not limited to the implied warranties of merchantability orfitness for a particular purpose,are excluded. Except as expressly provided in any written license agreement from MIPS Technologies or an authorized third party,the furnishing of this document does not give recipient any license to any intellectual property rights,including any patent rights, that cover the information in this document.The information contained in this document shall not be exported or transferred for the purpose of reexporting in violation of any U.S. or non-U.S. regulation, treaty, Executive Order, law, statute, amendment or supplement thereto. The information contained in this document constitutes one or more of the following: commercial computer software, commercial computer software documentation or other commercial items.If the user of this information,or any related documentation of any kind,including related technical data or manuals,is an agency,department,or other entity of the United States government ("Government"), the use, duplication, reproduction, release, modification, disclosure, or transfer of this information, or any related documentation of any kind, is restricted in accordance with Federal Acquisition Regulation12.212for civilian agencies and Defense Federal Acquisition Regulation Supplement227.7202 for military agencies.The use of this information by the Government is further restricted in accordance with the terms of the license agreement(s) and/or applicable contract terms and conditions covering this information from MIPS Technologies or an authorized third party.MIPS,R3000,R4000,R5000and R10000are among the registered trademarks of MIPS Technologies,Inc.in the United States and other countries,and MIPS16,MIPS16e,MIPS32,MIPS64,MIPS-3D,MIPS-based,MIPS I,MIPS II,MIPS III,MIPS IV,MIPS V,MIPSsim,SmartMIPS,MIPS Technologies logo,4K,4Kc,4Km,4Kp,4KE,4KEc,4KEm,4KEp, 4KS, 4KSc, 4KSd, M4K, 5K, 5Kc, 5Kf, 20Kc, 25Kf, ASMACRO, ATLAS, At the Core of the User Experience., BusBridge, CoreFPGA, CoreLV, EC, JALGO, MALTA, MDMX, MGB, PDtrace, Pipeline, Pro, Pro Series, SEAD, SEAD-2, SOC-it and YAMON are among the trademarks of MIPS Technologies, Inc.All other trademarks referred to herein are the property of their respective owners.Template: B1.08, Built with tags: 2B ARCH MIPS32MIPS32™ Architecture For Programmers Volume I, Revision 2.00 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Table of ContentsChapter 1 About This Book (1)1.1 Typographical Conventions (1)1.1.1 Italic Text (1)1.1.2 Bold Text (1)1.1.3 Courier Text (1)1.2 UNPREDICTABLE and UNDEFINED (2)1.2.1 UNPREDICTABLE (2)1.2.2 UNDEFINED (2)1.3 Special Symbols in Pseudocode Notation (2)1.4 For More Information (4)Chapter 2 The MIPS Architecture: An Introduction (7)2.1 MIPS32 and MIPS64 Overview (7)2.1.1 Historical Perspective (7)2.1.2 Architectural Evolution (7)2.1.3 Architectural Changes Relative to the MIPS I through MIPS V Architectures (9)2.2 Compliance and Subsetting (9)2.3 Components of the MIPS Architecture (10)2.3.1 MIPS Instruction Set Architecture (ISA) (10)2.3.2 MIPS Privileged Resource Architecture (PRA) (10)2.3.3 MIPS Application Specific Extensions (ASEs) (10)2.3.4 MIPS User Defined Instructions (UDIs) (11)2.4 Architecture Versus Implementation (11)2.5 Relationship between the MIPS32 and MIPS64 Architectures (11)2.6 Instructions, Sorted by ISA (12)2.6.1 List of MIPS32 Instructions (12)2.6.2 List of MIPS64 Instructions (13)2.7 Pipeline Architecture (13)2.7.1 Pipeline Stages and Execution Rates (13)2.7.2 Parallel Pipeline (14)2.7.3 Superpipeline (14)2.7.4 Superscalar Pipeline (14)2.8 Load/Store Architecture (15)2.9 Programming Model (15)2.9.1 CPU Data Formats (16)2.9.2 FPU Data Formats (16)2.9.3 Coprocessors (CP0-CP3) (16)2.9.4 CPU Registers (16)2.9.5 FPU Registers (18)2.9.6 Byte Ordering and Endianness (21)2.9.7 Memory Access Types (25)2.9.8 Implementation-Specific Access Types (26)2.9.9 Cache Coherence Algorithms and Access Types (26)2.9.10 Mixing Access Types (26)Chapter 3 Application Specific Extensions (27)3.1 Description of ASEs (27)3.2 List of Application Specific Instructions (28)3.2.1 The MIPS16e Application Specific Extension to the MIPS32Architecture (28)3.2.2 The MDMX Application Specific Extension to the MIPS64 Architecture (28)3.2.3 The MIPS-3D Application Specific Extension to the MIPS64 Architecture (28)MIPS32™ Architecture For Programmers Volume I, Revision 2.00i Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.3.2.4 The SmartMIPS Application Specific Extension to the MIPS32 Architecture (28)Chapter 4 Overview of the CPU Instruction Set (29)4.1 CPU Instructions, Grouped By Function (29)4.1.1 CPU Load and Store Instructions (29)4.1.2 Computational Instructions (32)4.1.3 Jump and Branch Instructions (35)4.1.4 Miscellaneous Instructions (37)4.1.5 Coprocessor Instructions (40)4.2 CPU Instruction Formats (41)Chapter 5 Overview of the FPU Instruction Set (43)5.1 Binary Compatibility (43)5.2 Enabling the Floating Point Coprocessor (44)5.3 IEEE Standard 754 (44)5.4 FPU Data Types (44)5.4.1 Floating Point Formats (44)5.4.2 Fixed Point Formats (48)5.5 Floating Point Register Types (48)5.5.1 FPU Register Models (49)5.5.2 Binary Data Transfers (32-Bit and 64-Bit) (49)5.5.3 FPRs and Formatted Operand Layout (50)5.6 Floating Point Control Registers (FCRs) (50)5.6.1 Floating Point Implementation Register (FIR, CP1 Control Register 0) (51)5.6.2 Floating Point Control and Status Register (FCSR, CP1 Control Register 31) (53)5.6.3 Floating Point Condition Codes Register (FCCR, CP1 Control Register 25) (55)5.6.4 Floating Point Exceptions Register (FEXR, CP1 Control Register 26) (56)5.6.5 Floating Point Enables Register (FENR, CP1 Control Register 28) (56)5.7 Formats of Values Used in FP Registers (57)5.8 FPU Exceptions (58)5.8.1 Exception Conditions (59)5.9 FPU Instructions (62)5.9.1 Data Transfer Instructions (62)5.9.2 Arithmetic Instructions (63)5.9.3 Conversion Instructions (65)5.9.4 Formatted Operand-Value Move Instructions (66)5.9.5 Conditional Branch Instructions (67)5.9.6 Miscellaneous Instructions (68)5.10 Valid Operands for FPU Instructions (68)5.11 FPU Instruction Formats (70)5.11.1 Implementation Note (71)Appendix A Instruction Bit Encodings (75)A.1 Instruction Encodings and Instruction Classes (75)A.2 Instruction Bit Encoding Tables (75)A.3 Floating Point Unit Instruction Format Encodings (82)Appendix B Revision History (85)ii MIPS32™ Architecture For Programmers Volume I, Revision 2.00 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Figure 2-1: Relationship between the MIPS32 and MIPS64 Architectures (11)Figure 2-2: One-Deep Single-Completion Instruction Pipeline (13)Figure 2-3: Four-Deep Single-Completion Pipeline (14)Figure 2-4: Four-Deep Superpipeline (14)Figure 2-5: Four-Way Superscalar Pipeline (15)Figure 2-6: CPU Registers (18)Figure 2-7: FPU Registers for a 32-bit FPU (20)Figure 2-8: FPU Registers for a 64-bit FPU if Status FR is 1 (21)Figure 2-9: FPU Registers for a 64-bit FPU if Status FR is 0 (22)Figure 2-10: Big-Endian Byte Ordering (23)Figure 2-11: Little-Endian Byte Ordering (23)Figure 2-12: Big-Endian Data in Doubleword Format (24)Figure 2-13: Little-Endian Data in Doubleword Format (24)Figure 2-14: Big-Endian Misaligned Word Addressing (25)Figure 2-15: Little-Endian Misaligned Word Addressing (25)Figure 3-1: MIPS ISAs and ASEs (27)Figure 3-2: User-Mode MIPS ISAs and Optional ASEs (27)Figure 4-1: Immediate (I-Type) CPU Instruction Format (42)Figure 4-2: Jump (J-Type) CPU Instruction Format (42)Figure 4-3: Register (R-Type) CPU Instruction Format (42)Figure 5-1: Single-Precisions Floating Point Format (S) (45)Figure 5-2: Double-Precisions Floating Point Format (D) (45)Figure 5-3: Paired Single Floating Point Format (PS) (46)Figure 5-4: Word Fixed Point Format (W) (48)Figure 5-5: Longword Fixed Point Format (L) (48)Figure 5-6: FPU Word Load and Move-to Operations (49)Figure 5-7: FPU Doubleword Load and Move-to Operations (50)Figure 5-8: Single Floating Point or Word Fixed Point Operand in an FPR (50)Figure 5-9: Double Floating Point or Longword Fixed Point Operand in an FPR (50)Figure 5-10: Paired-Single Floating Point Operand in an FPR (50)Figure 5-11: FIR Register Format (51)Figure 5-12: FCSR Register Format (53)Figure 5-13: FCCR Register Format (55)Figure 5-14: FEXR Register Format (56)Figure 5-15: FENR Register Format (56)Figure 5-16: Effect of FPU Operations on the Format of Values Held in FPRs (58)Figure 5-17: I-Type (Immediate) FPU Instruction Format (71)Figure 5-18: R-Type (Register) FPU Instruction Format (71)Figure 5-19: Register-Immediate FPU Instruction Format (71)Figure 5-20: Condition Code, Immediate FPU Instruction Format (71)Figure 5-21: Formatted FPU Compare Instruction Format (71)Figure 5-22: FP RegisterMove, Conditional Instruction Format (71)Figure 5-23: Four-Register Formatted Arithmetic FPU Instruction Format (72)Figure 5-24: Register Index FPU Instruction Format (72)Figure 5-25: Register Index Hint FPU Instruction Format (72)Figure 5-26: Condition Code, Register Integer FPU Instruction Format (72)Figure A-1: Sample Bit Encoding Table (76)MIPS32™ Architecture For Programmers Volume I, Revision 2.00iii Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Table 1-1: Symbols Used in Instruction Operation Statements (2)Table 2-1: MIPS32 Instructions (12)Table 2-2: MIPS64 Instructions (13)Table 2-3: Unaligned Load and Store Instructions (24)Table 4-1: Load and Store Operations Using Register + Offset Addressing Mode (30)Table 4-2: Aligned CPU Load/Store Instructions (30)Table 4-3: Unaligned CPU Load and Store Instructions (31)Table 4-4: Atomic Update CPU Load and Store Instructions (31)Table 4-5: Coprocessor Load and Store Instructions (31)Table 4-6: FPU Load and Store Instructions Using Register+Register Addressing (32)Table 4-7: ALU Instructions With an Immediate Operand (33)Table 4-8: Three-Operand ALU Instructions (33)Table 4-9: Two-Operand ALU Instructions (34)Table 4-10: Shift Instructions (34)Table 4-11: Multiply/Divide Instructions (35)Table 4-12: Unconditional Jump Within a 256 Megabyte Region (36)Table 4-13: PC-Relative Conditional Branch Instructions Comparing Two Registers (36)Table 4-14: PC-Relative Conditional Branch Instructions Comparing With Zero (37)Table 4-15: Deprecated Branch Likely Instructions (37)Table 4-16: Serialization Instruction (38)Table 4-17: System Call and Breakpoint Instructions (38)Table 4-18: Trap-on-Condition Instructions Comparing Two Registers (38)Table 4-19: Trap-on-Condition Instructions Comparing an Immediate Value (38)Table 4-20: CPU Conditional Move Instructions (39)Table 4-21: Prefetch Instructions (39)Table 4-22: NOP Instructions (40)Table 4-23: Coprocessor Definition and Use in the MIPS Architecture (40)Table 4-24: CPU Instruction Format Fields (42)Table 5-1: Parameters of Floating Point Data Types (45)Table 5-2: Value of Single or Double Floating Point DataType Encoding (46)Table 5-3: Value Supplied When a New Quiet NaN Is Created (47)Table 5-4: FIR Register Field Descriptions (51)Table 5-5: FCSR Register Field Descriptions (53)Table 5-6: Cause, Enable, and Flag Bit Definitions (55)Table 5-7: Rounding Mode Definitions (55)Table 5-8: FCCR Register Field Descriptions (56)Table 5-9: FEXR Register Field Descriptions (56)Table 5-10: FENR Register Field Descriptions (57)Table 5-11: Default Result for IEEE Exceptions Not Trapped Precisely (60)Table 5-12: FPU Data Transfer Instructions (62)Table 5-13: FPU Loads and Stores Using Register+Offset Address Mode (63)Table 5-14: FPU Loads and Using Register+Register Address Mode (63)Table 5-15: FPU Move To and From Instructions (63)Table 5-16: FPU IEEE Arithmetic Operations (64)Table 5-17: FPU-Approximate Arithmetic Operations (64)Table 5-18: FPU Multiply-Accumulate Arithmetic Operations (65)Table 5-19: FPU Conversion Operations Using the FCSR Rounding Mode (65)Table 5-20: FPU Conversion Operations Using a Directed Rounding Mode (65)Table 5-21: FPU Formatted Operand Move Instructions (66)Table 5-22: FPU Conditional Move on True/False Instructions (66)iv MIPS32™ Architecture For Programmers Volume I, Revision 2.00 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Table 5-23: FPU Conditional Move on Zero/Nonzero Instructions (67)Table 5-24: FPU Conditional Branch Instructions (67)Table 5-25: Deprecated FPU Conditional Branch Likely Instructions (67)Table 5-26: CPU Conditional Move on FPU True/False Instructions (68)Table 5-27: FPU Operand Format Field (fmt, fmt3) Encoding (68)Table 5-28: Valid Formats for FPU Operations (69)Table 5-29: FPU Instruction Format Fields (72)Table A-1: Symbols Used in the Instruction Encoding Tables (76)Table A-2: MIPS32 Encoding of the Opcode Field (77)Table A-3: MIPS32 SPECIAL Opcode Encoding of Function Field (78)Table A-4: MIPS32 REGIMM Encoding of rt Field (78)Table A-5: MIPS32 SPECIAL2 Encoding of Function Field (78)Table A-6: MIPS32 SPECIAL3 Encoding of Function Field for Release 2 of the Architecture (78)Table A-7: MIPS32 MOVCI Encoding of tf Bit (79)Table A-8: MIPS32 SRL Encoding of Shift/Rotate (79)Table A-9: MIPS32 SRLV Encoding of Shift/Rotate (79)Table A-10: MIPS32 BSHFL Encoding of sa Field (79)Table A-11: MIPS32 COP0 Encoding of rs Field (79)Table A-12: MIPS32 COP0 Encoding of Function Field When rs=CO (80)Table A-13: MIPS32 COP1 Encoding of rs Field (80)Table A-14: MIPS32 COP1 Encoding of Function Field When rs=S (80)Table A-15: MIPS32 COP1 Encoding of Function Field When rs=D (81)Table A-16: MIPS32 COP1 Encoding of Function Field When rs=W or L (81)Table A-17: MIPS64 COP1 Encoding of Function Field When rs=PS (81)Table A-18: MIPS32 COP1 Encoding of tf Bit When rs=S, D, or PS, Function=MOVCF (81)Table A-19: MIPS32 COP2 Encoding of rs Field (82)Table A-20: MIPS64 COP1X Encoding of Function Field (82)Table A-21: Floating Point Unit Instruction Format Encodings (82)MIPS32™ Architecture For Programmers Volume I, Revision 2.00v Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.vi MIPS32™ Architecture For Programmers Volume I, Revision 2.00 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Chapter 1About This BookThe MIPS32™ Architecture For Programmers V olume I comes as a multi-volume set.•V olume I describes conventions used throughout the document set, and provides an introduction to the MIPS32™Architecture•V olume II provides detailed descriptions of each instruction in the MIPS32™ instruction set•V olume III describes the MIPS32™Privileged Resource Architecture which defines and governs the behavior of the privileged resources included in a MIPS32™ processor implementation•V olume IV-a describes the MIPS16e™ Application-Specific Extension to the MIPS32™ Architecture•V olume IV-b describes the MDMX™ Application-Specific Extension to the MIPS32™ Architecture and is notapplicable to the MIPS32™ document set•V olume IV-c describes the MIPS-3D™ Application-Specific Extension to the MIPS64™ Architecture and is notapplicable to the MIPS32™ document set•V olume IV-d describes the SmartMIPS™Application-Specific Extension to the MIPS32™ Architecture1.1Typographical ConventionsThis section describes the use of italic,bold and courier fonts in this book.1.1.1Italic Text•is used for emphasis•is used for bits,fields,registers, that are important from a software perspective (for instance, address bits used bysoftware,and programmablefields and registers),and variousfloating point instruction formats,such as S,D,and PS •is used for the memory access types, such as cached and uncached1.1.2Bold Text•represents a term that is being defined•is used for bits andfields that are important from a hardware perspective (for instance,register bits, which are not programmable but accessible only to hardware)•is used for ranges of numbers; the range is indicated by an ellipsis. For instance,5..1indicates numbers 5 through 1•is used to emphasize UNPREDICTABLE and UNDEFINED behavior, as defined below.1.1.3Courier TextCourier fixed-width font is used for text that is displayed on the screen, and for examples of code and instruction pseudocode.MIPS32™ Architecture For Programmers Volume I, Revision 2.001 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.Chapter 1 About This Book1.2UNPREDICTABLE and UNDEFINEDThe terms UNPREDICTABLE and UNDEFINED are used throughout this book to describe the behavior of theprocessor in certain cases.UNDEFINED behavior or operations can occur only as the result of executing instructions in a privileged mode (i.e., in Kernel Mode or Debug Mode, or with the CP0 usable bit set in the Status register).Unprivileged software can never cause UNDEFINED behavior or operations. Conversely, both privileged andunprivileged software can cause UNPREDICTABLE results or operations.1.2.1UNPREDICTABLEUNPREDICTABLE results may vary from processor implementation to implementation,instruction to instruction,or as a function of time on the same implementation or instruction. Software can never depend on results that areUNPREDICTABLE.UNPREDICTABLE operations may cause a result to be generated or not.If a result is generated, it is UNPREDICTABLE.UNPREDICTABLE operations may cause arbitrary exceptions.UNPREDICTABLE results or operations have several implementation restrictions:•Implementations of operations generating UNPREDICTABLE results must not depend on any data source(memory or internal state) which is inaccessible in the current processor mode•UNPREDICTABLE operations must not read, write, or modify the contents of memory or internal state which is inaccessible in the current processor mode. For example,UNPREDICTABLE operations executed in user modemust not access memory or internal state that is only accessible in Kernel Mode or Debug Mode or in another process •UNPREDICTABLE operations must not halt or hang the processor1.2.2UNDEFINEDUNDEFINED operations or behavior may vary from processor implementation to implementation, instruction toinstruction, or as a function of time on the same implementation or instruction.UNDEFINED operations or behavior may vary from nothing to creating an environment in which execution can no longer continue.UNDEFINED operations or behavior may cause data loss.UNDEFINED operations or behavior has one implementation restriction:•UNDEFINED operations or behavior must not cause the processor to hang(that is,enter a state from which there is no exit other than powering down the processor).The assertion of any of the reset signals must restore the processor to an operational state1.3Special Symbols in Pseudocode NotationIn this book, algorithmic descriptions of an operation are described as pseudocode in a high-level language notation resembling Pascal. Special symbols used in the pseudocode notation are listed in Table 1-1.Table 1-1 Symbols Used in Instruction Operation StatementsSymbol Meaning←Assignment=, ≠Tests for equality and inequality||Bit string concatenationx y A y-bit string formed by y copies of the single-bit value x2MIPS32™ Architecture For Programmers Volume I, Revision 2.00 Copyright © 2001-2003 MIPS Technologies Inc. All rights reserved.1.3Special Symbols in Pseudocode Notationb#n A constant value n in base b.For instance10#100represents the decimal value100,2#100represents the binary value 100 (decimal 4), and 16#100 represents the hexadecimal value 100 (decimal 256). If the "b#" prefix is omitted, the default base is 10.x y..z Selection of bits y through z of bit string x.Little-endian bit notation(rightmost bit is0)is used.If y is less than z, this expression is an empty (zero length) bit string.+, −2’s complement or floating point arithmetic: addition, subtraction∗, ×2’s complement or floating point multiplication (both used for either)div2’s complement integer divisionmod2’s complement modulo/Floating point division<2’s complement less-than comparison>2’s complement greater-than comparison≤2’s complement less-than or equal comparison≥2’s complement greater-than or equal comparisonnor Bitwise logical NORxor Bitwise logical XORand Bitwise logical ANDor Bitwise logical ORGPRLEN The length in bits (32 or 64) of the CPU general-purpose registersGPR[x]CPU general-purpose register x. The content of GPR[0] is always zero.SGPR[s,x]In Release 2 of the Architecture, multiple copies of the CPU general-purpose registers may be implemented.SGPR[s,x] refers to GPR set s, register x. GPR[x] is a short-hand notation for SGPR[ SRSCtl CSS, x].FPR[x]Floating Point operand register xFCC[CC]Floating Point condition code CC.FCC[0] has the same value as COC[1].FPR[x]Floating Point (Coprocessor unit 1), general register xCPR[z,x,s]Coprocessor unit z, general register x,select sCP2CPR[x]Coprocessor unit 2, general register xCCR[z,x]Coprocessor unit z, control register xCP2CCR[x]Coprocessor unit 2, control register xCOC[z]Coprocessor unit z condition signalXlat[x]Translation of the MIPS16e GPR number x into the corresponding 32-bit GPR numberBigEndianMem Endian mode as configured at chip reset (0→Little-Endian, 1→ Big-Endian). Specifies the endianness of the memory interface(see LoadMemory and StoreMemory pseudocode function descriptions),and the endianness of Kernel and Supervisor mode execution.BigEndianCPU The endianness for load and store instructions (0→ Little-Endian, 1→ Big-Endian). In User mode, this endianness may be switched by setting the RE bit in the Status register.Thus,BigEndianCPU may be computed as (BigEndianMem XOR ReverseEndian).Table 1-1 Symbols Used in Instruction Operation StatementsSymbol MeaningChapter 1 About This Book1.4For More InformationVarious MIPS RISC processor manuals and additional information about MIPS products can be found at the MIPS URL:ReverseEndianSignal to reverse the endianness of load and store instructions.This feature is available in User mode only,and is implemented by setting the RE bit of the Status register.Thus,ReverseEndian may be computed as (SR RE and User mode).LLbitBit of virtual state used to specify operation for instructions that provide atomic read-modify-write.LLbit is set when a linked load occurs; it is tested and cleared by the conditional store. It is cleared, during other CPU operation,when a store to the location would no longer be atomic.In particular,it is cleared by exception return instructions.I :,I+n :,I-n :This occurs as a prefix to Operation description lines and functions as a label. It indicates the instruction time during which the pseudocode appears to “execute.” Unless otherwise indicated, all effects of the currentinstruction appear to occur during the instruction time of the current instruction.No label is equivalent to a time label of I . Sometimes effects of an instruction appear to occur either earlier or later — that is, during theinstruction time of another instruction.When this happens,the instruction operation is written in sections labeled with the instruction time,relative to the current instruction I ,in which the effect of that pseudocode appears to occur.For example,an instruction may have a result that is not available until after the next instruction.Such an instruction has the portion of the instruction operation description that writes the result register in a section labeled I +1.The effect of pseudocode statements for the current instruction labelled I +1appears to occur “at the same time”as the effect of pseudocode statements labeled I for the following instruction.Within one pseudocode sequence,the effects of the statements take place in order. However, between sequences of statements for differentinstructions that occur “at the same time,” there is no defined order. Programs must not depend on a particular order of evaluation between such sections.PCThe Program Counter value.During the instruction time of an instruction,this is the address of the instruction word. The address of the instruction that occurs during the next instruction time is determined by assigning a value to PC during an instruction time. If no value is assigned to PC during an instruction time by anypseudocode statement,it is automatically incremented by either 2(in the case of a 16-bit MIPS16e instruction)or 4before the next instruction time.A taken branch assigns the target address to the PC during the instruction time of the instruction in the branch delay slot.PABITSThe number of physical address bits implemented is represented by the symbol PABITS.As such,if 36physical address bits were implemented, the size of the physical address space would be 2PABITS = 236 bytes.FP32RegistersModeIndicates whether the FPU has 32-bit or 64-bit floating point registers (FPRs).In MIPS32,the FPU has 3232-bit FPRs in which 64-bit data types are stored in even-odd pairs of FPRs.In MIPS64,the FPU has 3264-bit FPRs in which 64-bit data types are stored in any FPR.In MIPS32implementations,FP32RegistersMode is always a 0.MIPS64implementations have a compatibility mode in which the processor references the FPRs as if it were a MIPS32 implementation. In such a caseFP32RegisterMode is computed from the FR bit in the Status register.If this bit is a 0,the processor operates as if it had 32 32-bit FPRs. If this bit is a 1, the processor operates with 32 64-bit FPRs.The value of FP32RegistersMode is computed from the FR bit in the Status register.InstructionInBranchDelaySlotIndicates whether the instruction at the Program Counter address was executed in the delay slot of a branch or jump. This condition reflects the dynamic state of the instruction, not the static state. That is, the value is false if a branch or jump occurs to an instruction whose PC immediately follows a branch or jump, but which is not executed in the delay slot of a branch or jump.SignalException(exce ption, argument)Causes an exception to be signaled, using the exception parameter as the type of exception and the argument parameter as an exception-specific argument). Control does not return from this pseudocode function - the exception is signaled at the point of the call.Table 1-1 Symbols Used in Instruction Operation StatementsSymbolMeaning。
Globally networked risks and how to respond
BOX 1
Risk, systemic risk and hyper-risk
According to the standard ISO 31000 (2009; /iso/ catalogue_detail?csnumber543170), risk is defined as ‘‘effect of uncertainty on objectives’’. It is often quantified as the probability of occurrence of an (adverse) event, times its (negative) impact (damage), but it should be kept in mind that risks might also create positive impacts, such as opportunities for some stakeholders.
数字经济与实体经济深度融合的内涵和途径

数字经济与实体经济深度融合的内涵和途径一、引言A.引入数字经济和实体经济的概念B.数字经济与实体经济深度融合的意义和价值二、数字经济与实体经济的关系A.数字经济是实体经济的延伸和拓展B.数字经济给实体经济带来了新的机遇和挑战三、数字经济对实体经济的影响A.数字化推动实体经济转型升级B.数字经济改变了实体经济的发展方式四、实体经济对数字经济的支撑A.实体经济是数字经济的基础和支撑B.实体经济是数字经济数字化的源头五、数字经济与实体经济的融合途径A.构建数字经济和实体经济深度融合的平台B.实施数字化服务和效率提升的方案六、数字经济与实体经济融合的情况分析A.数字化深度渗透到实体经济各个领域B.实体经济数字化程度提升的实战案例七、数字经济与实体经济融合的挑战与未来展望A.数字经济与实体经济之间存在的问题与难点B.数字经济与实体经济融合的未来发展趋势与新机遇八、结论A.数字经济和实体经济必须深度融合B.数字经济和实体经济深度融合的前景和意义一、引言随着数字技术的不断进步和应用,数字经济已经成为了现代经济的核心,实体经济则是数字经济所服务的现实社会经济组织及其相关产业的总和。
它们的融合,对于经济社会的可持续发展,乃至人类社会的进步,具有不可替代的作用。
数字经济作为一种以数字信息技术为驱动,以数字化产品及服务为中心,以数字流通与数字支付为核心的经济形态,正逐渐取代传统实体经济成为世界经济发展的新引擎。
随着数字经济快速发展,实体经济在数字化转型中的角色越来越重要,两者的深度融合已经成为业界和政府普遍关注的重要议题。
本文旨在探讨数字经济与实体经济深度融合的内涵和途径,分析其意义和价值,挖掘数字经济和实体经济间的互动关系。
本文将分为八个章节进行探讨。
第一章主要介绍数字经济和实体经济的关系,为后面章节的展开奠定基础。
A. 引入数字经济和实体经济的概念数字经济是指以电子商务、数字支付、大数据、人工智能等为基础的全球经济体系,是经济发展的新动力,也是人类社会经济发展进程中的新经济模式。
Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease trans
Reproduction numbers and sub-threshold endemicequilibria for compartmental models of disease transmissionP.van den Driesschea,1,James Watmough b,*,2aDepartment of Mathematics and Statistics,University of Victoria,Victoria,BC,Canada V8W 3P4b Department of Mathematics and Statistics,University of New Brunswick,Fredericton,NB,Canada E3B 5A3Received 26April 2001;received in revised form 27June 2001;accepted 27June 2001Dedicated to the memory of John JacquezAbstractA precise definition of the basic reproduction number,R 0,is presented for a general compartmental disease transmission model based on a system of ordinary differential equations.It is shown that,if R 0<1,then the disease free equilibrium is locally asymptotically stable;whereas if R 0>1,then it is unstable.Thus,R 0is a threshold parameter for the model.An analysis of the local centre manifold yields a simple criterion for the existence and stability of super-and sub-threshold endemic equilibria for R 0near one.This criterion,together with the definition of R 0,is illustrated by treatment,multigroup,staged progression,multistrain and vector–host models and can be applied to more complex models.The results are significant for disease control.Ó2002Elsevier Science Inc.All rights reserved.Keywords:Basic reproduction number;Sub-threshold equilibrium;Disease transmission model;Disease control1.IntroductionOne of the most important concerns about any infectious disease is its ability to invade a population.Many epidemiological models have a disease free equilibrium (DFE)at whichtheMathematical Biosciences 180(2002)29–48/locate/mbs*Corresponding author.Tel.:+1-5064587323;fax:+1-5064534705.E-mail addresses:pvdd@math.uvic.ca (P.van den Driessche),watmough@unb.ca (J.Watmough).URL:http://www.math.unb.ca/$watmough.1Research supported in part by an NSERC Research Grant,the University of Victoria Committee on faculty research and travel and MITACS.2Research supported by an NSERC Postdoctoral Fellowship tenured at the University of Victoria.0025-5564/02/$-see front matter Ó2002Elsevier Science Inc.All rights reserved.PII:S0025-5564(02)00108-630P.van den Driessche,J.Watmough/Mathematical Biosciences180(2002)29–48population remains in the absence of disease.These models usually have a threshold parameter, known as the basic reproduction number,R0,such that if R0<1,then the DFE is locally as-ymptotically stable,and the disease cannot invade the population,but if R0>1,then the DFE is unstable and invasion is always possible(see the survey paper by Hethcote[1]).Diekmann et al.[2]define R0as the spectral radius of the next generation matrix.We write down in detail a general compartmental disease transmission model suited to heterogeneous populations that can be modelled by a system of ordinary differential equations.We derive an expression for the next generation matrix for this model and examine the threshold R0¼1in detail.The model is suited to a heterogeneous population in which the vital and epidemiological parameters for an individual may depend on such factors as the stage of the disease,spatial position,age or behaviour.However,we assume that the population can be broken into homo-geneous subpopulations,or compartments,such that individuals in a given compartment are indistinguishable from one another.That is,the parameters may vary from compartment to compartment,but are identical for all individuals within a given compartment.We also assume that the parameters do not depend on the length of time an individual has spent in a compart-ment.The model is based on a system of ordinary equations describing the evolution of the number of individuals in each compartment.In addition to showing that R0is a threshold parameter for the local stability of the DFE, we apply centre manifold theory to determine the existence and stability of endemic equilib-ria near the threshold.We show that some models may have unstable endemic equilibria near the DFE for R0<1.This suggests that even though the DFE is locally stable,the disease may persist.The model is developed in Section2.The basic reproduction number is defined and shown to bea threshold parameter in Section3,and the definition is illustrated by several examples in Section4.The analysis of the centre manifold is presented in Section5.The epidemiological ramifications of the results are presented in Section6.2.A general compartmental epidemic model for a heterogeneous populationConsider a heterogeneous population whose individuals are distinguishable by age,behaviour, spatial position and/or stage of disease,but can be grouped into n homogeneous compartments.A general epidemic model for such a population is developed in this section.Let x¼ðx1;...;x nÞt, with each x i P0,be the number of individuals in each compartment.For clarity we sort the compartments so that thefirst m compartments correspond to infected individuals.The distinc-tion between infected and uninfected compartments must be determined from the epidemiological interpretation of the model and cannot be deduced from the structure of the equations alone,as we shall discuss below.It is plausible that more than one interpretation is possible for some models.A simple epidemic model illustrating this is given in Section4.1.The basic reproduction number can not be determined from the structure of the mathematical model alone,but depends on the definition of infected and uninfected compartments.We define X s to be the set of all disease free states.That isX s¼f x P0j x i¼0;i¼1;...;m g:In order to compute R0,it is important to distinguish new infections from all other changes inpopulation.Let F iðxÞbe the rate of appearance of new infections in compartment i,Vþi ðxÞbe therate of transfer of individuals into compartment i by all other means,and VÀi ðxÞbe the rate oftransfer of individuals out of compartment i.It is assumed that each function is continuously differentiable at least twice in each variable.The disease transmission model consists of non-negative initial conditions together with the following system of equations:_x i¼f iðxÞ¼F iðxÞÀV iðxÞ;i¼1;...;n;ð1Þwhere V i¼VÀi ÀVþiand the functions satisfy assumptions(A1)–(A5)described below.Sinceeach function represents a directed transfer of individuals,they are all non-negative.Thus,(A1)if x P0,then F i;Vþi ;VÀiP0for i¼1;...;n.If a compartment is empty,then there can be no transfer of individuals out of the compartment by death,infection,nor any other means.Thus,(A2)if x i¼0then VÀi ¼0.In particular,if x2X s then VÀi¼0for i¼1;...;m.Consider the disease transmission model given by(1)with f iðxÞ,i¼1;...;n,satisfying con-ditions(A1)and(A2).If x i¼0,then f iðxÞP0and hence,the non-negative cone(x i P0, i¼1;...;n)is forward invariant.By Theorems1.1.8and1.1.9of Wiggins[3,p.37]for each non-negative initial condition there is a unique,non-negative solution.The next condition arises from the simple fact that the incidence of infection for uninfected compartments is zero.(A3)F i¼0if i>m.To ensure that the disease free subspace is invariant,we assume that if the population is free of disease then the population will remain free of disease.That is,there is no(density independent) immigration of infectives.This condition is stated as follows:(A4)if x2X s then F iðxÞ¼0and VþiðxÞ¼0for i¼1;...;m.The remaining condition is based on the derivatives of f near a DFE.For our purposes,we define a DFE of(1)to be a(locally asymptotically)stable equilibrium solution of the disease free model,i.e.,(1)restricted to X s.Note that we need not assume that the model has a unique DFE. Consider a population near the DFE x0.If the population remains near the DFE(i.e.,if the introduction of a few infective individuals does not result in an epidemic)then the population will return to the DFE according to the linearized system_x¼Dfðx0ÞðxÀx0Þ;ð2Þwhere Dfðx0Þis the derivative½o f i=o x j evaluated at the DFE,x0(i.e.,the Jacobian matrix).Here, and in what follows,some derivatives are one sided,since x0is on the domain boundary.We restrict our attention to systems in which the DFE is stable in the absence of new infection.That is, (A5)If FðxÞis set to zero,then all eigenvalues of Dfðx0Þhave negative real parts.P.van den Driessche,J.Watmough/Mathematical Biosciences180(2002)29–4831The conditions listed above allow us to partition the matrix Df ðx 0Þas shown by the following lemma.Lemma 1.If x 0is a DFE of (1)and f i ðx Þsatisfies (A1)–(A5),then the derivatives D F ðx 0Þand D V ðx 0Þare partitioned asD F ðx 0Þ¼F 000 ;D V ðx 0Þ¼V 0J 3J 4;where F and V are the m Âm matrices defined byF ¼o F i o x j ðx 0Þ !and V ¼o V i o x jðx 0Þ !with 16i ;j 6m :Further ,F is non-negative ,V is a non-singular M-matrix and all eigenvalues of J 4have positive real part .Proof.Let x 02X s be a DFE.By (A3)and (A4),ðo F i =o x j Þðx 0Þ¼0if either i >m or j >m .Similarly,by (A2)and (A4),if x 2X s then V i ðx Þ¼0for i 6m .Hence,ðo V i =o x j Þðx 0Þ¼0for i 6m and j >m .This shows the stated partition and zero blocks.The non-negativity of F follows from (A1)and (A4).Let f e j g be the Euclidean basis vectors.That is,e j is the j th column of the n Ân identity matrix.Then,for j ¼1;...;m ,o V i o x jðx 0Þ¼lim h !0þV i ðx 0þhe j ÞÀV i ðx 0Þh :To show that V is a non-singular M-matrix,note that if x 0is a DFE,then by (A2)and (A4),V i ðx 0Þ¼0for i ¼1;...;m ,and if i ¼j ,then the i th component of x 0þhe j ¼0and V i ðx 0þhe j Þ60,by (A1)and (A2).Hence,o V i =o x j 0for i m and j ¼i and V has the Z sign pattern (see Appendix A).Additionally,by (A5),all eigenvalues of V have positive real parts.These two conditions imply that V is a non-singular M-matrix [4,p.135(G 20)].Condition (A5)also implies that the eigenvalues of J 4have positive real part.Ã3.The basic reproduction numberThe basic reproduction number,denoted R 0,is ‘the expected number of secondary cases produced,in a completely susceptible population,by a typical infective individual’[2];see also [5,p.17].If R 0<1,then on average an infected individual produces less than one new infected individual over the course of its infectious period,and the infection cannot grow.Conversely,if R 0>1,then each infected individual produces,on average,more than one new infection,and the disease can invade the population.For the case of a single infected compartment,R 0is simply the product of the infection rate and the mean duration of the infection.However,for more complicated models with several infected compartments this simple heuristic definition of R 0is32P.van den Driessche,J.Watmough /Mathematical Biosciences 180(2002)29–48insufficient.A more general basic reproduction number can be defined as the number of new infections produced by a typical infective individual in a population at a DFE.To determine the fate of a‘typical’infective individual introduced into the population,we consider the dynamics of the linearized system(2)with reinfection turned off.That is,the system _x¼ÀD Vðx0ÞðxÀx0Þ:ð3ÞBy(A5),the DFE is locally asymptotically stable in this system.Thus,(3)can be used to de-termine the fate of a small number of infected individuals introduced to a disease free population.Let wi ð0Þbe the number of infected individuals initially in compartment i and letwðtÞ¼w1ðtÞ;...;w mðtÞðÞt be the number of these initially infected individuals remaining in the infected compartments after t time units.That is the vector w is thefirst m components of x.The partitioning of D Vðx0Þimplies that wðtÞsatisfies w0ðtÞ¼ÀV wðtÞ,which has the unique solution wðtÞ¼eÀVt wð0Þ.By Lemma1,V is a non-singular M-matrix and is,therefore,invertible and all of its eigenvalues have positive real parts.Thus,integrating F wðtÞfrom zero to infinity gives the expected number of new infections produced by the initially infected individuals as the vector FVÀ1wð0Þ.Since F is non-negative and V is a non-singular M-matrix,VÀ1is non-negative[4,p.137 (N38)],as is FVÀ1.To interpret the entries of FVÀ1and develop a meaningful definition of R0,consider the fate of an infected individual introduced into compartment k of a disease free population.The(j;k)entry of VÀ1is the average length of time this individual spends in compartment j during its lifetime, assuming that the population remains near the DFE and barring reinfection.The(i;j)entry of F is the rate at which infected individuals in compartment j produce new infections in compartment i. Hence,the(i;k)entry of the product FVÀ1is the expected number of new infections in com-partment i produced by the infected individual originally introduced into compartment k.Fol-lowing Diekmann et al.[2],we call FVÀ1the next generation matrix for the model and set R0¼qðFVÀ1Þ;ð4Þwhere qðAÞdenotes the spectral radius of a matrix A.The DFE,x0,is locally asymptotically stable if all the eigenvalues of the matrix Dfðx0Þhave negative real parts and unstable if any eigenvalue of Dfðx0Þhas a positive real part.By Lemma1, the eigenvalues of Dfðx0Þcan be partitioned into two sets corresponding to the infected and uninfected compartments.These two sets are the eigenvalues of FÀV and those ofÀJ4.Again by Lemma1,the eigenvalues ofÀJ4all have negative real part,thus the stability of the DFE is determined by the eigenvalues of FÀV.The following theorem states that R0is a threshold parameter for the stability of the DFE.Theorem2.Consider the disease transmission model given by(1)with fðxÞsatisfying conditions (A1)–(A5).If x0is a DFE of the model,then x0is locally asymptotically stable if R0<1,but un-stable if R0>1,where R0is defined by(4).Proof.Let J1¼FÀV.Since V is a non-singular M-matrix and F is non-negative,ÀJ1¼VÀF has the Z sign pattern(see Appendix A).Thus,sðJ1Þ<0()ÀJ1is a non-singular M-matrix;P.van den Driessche,J.Watmough/Mathematical Biosciences180(2002)29–483334P.van den Driessche,J.Watmough/Mathematical Biosciences180(2002)29–48where sðJ1Þdenotes the maximum real part of all the eigenvalues of the matrix J1(the spectral abscissa of J1).Since FVÀ1is non-negative,ÀJ1VÀ1¼IÀFVÀ1also has the Z sign pattern.Ap-plying Lemma5of Appendix A,with H¼V and B¼ÀJ1¼VÀF,we have ÀJ1is a non-singular M-matrix()IÀFVÀ1is a non-singular M-matrix:Finally,since FVÀ1is non-negative,all eigenvalues of FVÀ1have magnitude less than or equal to qðFVÀ1Þ.Thus,IÀFVÀ1is a non-singular M-matrix;()qðFVÀ1Þ<1:Hence,sðJ1Þ<0if and only if R0<1.Similarly,it follows thatsðJ1Þ¼0()ÀJ1is a singular M-matrix;()IÀFVÀ1is a singular M-matrix;()qðFVÀ1Þ¼1:The second equivalence follows from Lemma6of Appendix A,with H¼V and K¼F.The remainder of the equivalences follow as with the non-singular case.Hence,sðJ1Þ¼0if and only if R0¼1.It follows that sðJ1Þ>0if and only if R0>1.ÃA similar result can be found in the recent book by Diekmann and Heesterbeek[6,Theorem6.13].This result is known for the special case in which J1is irreducible and V is a positive di-agonal matrix[7–10].The special case in which V has positive diagonal and negative subdiagonal elements is proven in Hyman et al.[11,Appendix B];however,our approach is much simpler(see Section4.3).4.Examples4.1.Treatment modelThe decomposition of fðxÞinto the components F and V is illustrated using a simple treat-ment model.The model is based on the tuberculosis model of Castillo-Chavez and Feng[12,Eq.(1.1)],but also includes treatment failure used in their more elaborate two-strain model[12,Eq.(2.1)].A similar tuberculosis model with two treated compartments is proposed by Blower et al.[13].The population is divided into four compartments,namely,individuals susceptible to tu-berculosis(S),exposed individuals(E),infectious individuals(I)and treated individuals(T).The dynamics are illustrated in Fig.1.Susceptible and treated individuals enter the exposed com-partment at rates b1I=N and b2I=N,respectively,where N¼EþIþSþT.Exposed individuals progress to the infectious compartment at the rate m.All newborns are susceptible,and all indi-viduals die at the rate d>0.Thus,the core of the model is an SEI model using standard inci-dence.The treatment rates are r1for exposed individuals and r2for infectious individuals. However,only a fraction q of the treatments of infectious individuals are successful.Unsuc-cessfully treated infectious individuals re-enter the exposed compartment(p¼1Àq).The diseasetransmission model consists of the following differential equations together with non-negative initial conditions:_E¼b1SI=Nþb2TI=NÀðdþmþr1ÞEþpr2I;ð5aÞ_I¼m EÀðdþr2ÞI;ð5bÞ_S¼bðNÞÀdSÀb1SI=N;ð5cÞ_T¼ÀdTþr1Eþqr2IÀb2TI=N:ð5dÞProgression from E to I and failure of treatment are not considered to be new infections,but rather the progression of an infected individual through the various compartments.Hence,F¼b1SI=Nþb2TI=NB B@1C CA and V¼ðdþmþr1ÞEÀpr2IÀm Eþðdþr2ÞIÀbðNÞþdSþb1SI=NdTÀr1EÀqr2Iþb2TI=NB B@1C CA:ð6ÞThe infected compartments are E and I,giving m¼2.An equilibrium solution with E¼I¼0has the form x0¼ð0;0;S0;0Þt,where S0is any positive solution of bðS0Þ¼dS0.This will be a DFE if and only if b0ðS0Þ<d.Without loss of generality,assume S0¼1is a DFE.Then,F¼0b100;V¼dþmþr1Àpr2Àm dþr2;givingVÀ1¼1ðdþmþr1Þðdþr2ÞÀm pr2dþr2pr2m dþmþr1and R0¼b1m=ððdþmþr1Þðdþr2ÞÀm pr2Þ.A heuristic derivation of the(2;1)entry of VÀ1and R0are as follows:a fraction h1¼m=ðdþmþr1Þof exposed individuals progress to compartment I,a fraction h2¼pr2=ðdþr2Þof infectious individuals re-enter compartment E.Hence,a fractionh1of exposed individuals pass through compartment I at least once,a fraction h21h2passthroughat least twice,and a fraction h k 1h k À12pass through at least k times,spending an average of s ¼1=ðd þr 2Þtime units in compartment I on each pass.Thus,an individual introduced into com-partment E spends,on average,s ðh 1þh 21h 2þÁÁÁÞ¼s h 1=ð1Àh 1h 2Þ¼m =ððd þm þr 1Þðd þr 2ÞÀm pr 2Þtime units in compartment I over its expected lifetime.Multiplying this by b 1gives R 0.The model without treatment (r 1¼r 2¼0)is an SEI model with R 0¼b 1m =ðd ðd þm ÞÞ.The interpretation of R 0for this case is simpler.Only a fraction m =ðd þm Þof exposed individuals progress from compartment E to compartment I ,and individuals entering compartment I spend,on average,1=d time units there.Although conditions (A1)–(A5)do not restrict the decomposition of f i ðx Þto a single choice for F i ,only one such choice is epidemiologically correct.Different choices for the function F lead to different values for the spectral radius of FV À1,as shown in Table 1.In column (a),treatment failure is considered to be a new infection and in column (b),both treatment failure and pro-gression to infectiousness are considered new infections.In each case the condition q ðFV À1Þ<1yields the same portion of parameter space.Thus,q ðFV À1Þis a threshold parameter in both cases.The difference between the numbers lies in the epidemiological interpretation rather than the mathematical analysis.For example,in column (a),the infection rate is b 1þpr 2and an exposed individual is expected to spend m =ððd þm þr 1Þðd þr 2ÞÞtime units in compartment I .However,this reasoning is biologically flawed since treatment failure does not give rise to a newly infected individual.Table 1Decomposition of f leading to alternative thresholds(a)(b)Fb 1SI =N þb 2TI =N þpr 2I 0000B B @1C C A b 1SI =N þb 2TI =N þpr 2I m E 000B B @1C C A Vðd þm þr 1ÞE Àm E þðd þr 2ÞI Àb ðN ÞþdS þb 1SI =N dT Àr 1E Àqr 2I þb 2TI =N 0B B @1C C A ðd þm þr 1ÞE ðd þr 2ÞI Àb ðN ÞþdS þb 1SI =N dT Àr 1E Àqr 2I þb 2TI =N 0B B @1C C A F0b 1þpr 200 0b 1þpr 2m 0 V d þm þr 10Àm d þr 2d þm þr 100d þr 2 q (FV À1)b 1m þpr 2mðd þm þr 1Þðd þr 2Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib 1m þpr 2mðd þm þr 1Þðd þr 2Þs 36P.van den Driessche,J.Watmough /Mathematical Biosciences 180(2002)29–484.2.Multigroup modelIn the epidemiological literature,the term‘multigroup’usually refers to the division of a het-erogeneous population into several homogeneous groups based on individual behaviour(e.g., [14]).Each group is then subdivided into epidemiological compartments.The majority of mul-tigroup models in the literature are used for sexually transmitted diseases,such as HIV/AIDS or gonorrhea,where behaviour is an important factor in the probability of contracting the disease [7,8,14,15].As an example,we use an m-group SIRS-vaccination model of Hethcote[7,14]with a generalized incidence term.The sample model includes several SI multigroup models of HIV/ AIDS as special cases[8,15].The model equations are as follows:_I i ¼X mj¼1b ijðxÞS i I jÀðd iþc iþ iÞI i;ð7aÞ_S i ¼ð1Àp iÞb iÀðd iþh iÞS iþr i R iÀX mj¼1b ijðxÞS i I j;ð7bÞ_Ri¼p i b iþc i I iþh i S iÀðd iþr iÞR i;ð7cÞfor i¼1;...;m,where x¼ðI1;...;I m;S1;...;S m;R1;...;R mÞt.Susceptible and removed individu-als die at the rate d i>0,whereas infected individuals die at the faster rate d iþ i.Infected in-dividuals recover with temporary immunity from re-infection at the rate c i,and immunity lasts an expected1=r i time units.All newborns are susceptible,and a constant fraction b i are born into each group.A fraction p i of newborns are vaccinated at birth.Thereafter,susceptible individuals are vaccinated at the rate h i.The incidence,b ijðxÞdepends on individual behaviour,which determines the amount of mixing between the different groups(see,e.g.,Jacquez et al.[16]). The DFE for this model isx0¼ð0;...;0;S01;...;S0m;R01;...;R0mÞt;whereS0 i ¼b i d ið1Àp iÞþr iðÞd iðd iþh iþr iÞ;R0 i ¼b iðh iþd i p iÞd iðd iþh iþr iÞ:Linearizing(7a)about x¼x0givesF¼S0i b ijðx0ÞÂÃandV¼½ðd iþc iþ iÞd ij ;where d ij is one if i¼j,but zero otherwise.Thus,FVÀ1¼S0i b ijðx0Þ=ðd iÂþc iþ iÞÃ:P.van den Driessche,J.Watmough/Mathematical Biosciences180(2002)29–4837For the special case with b ij separable,that is,b ijðxÞ¼a iðxÞk jðxÞ,F has rank one,and the basic reproduction number isR0¼X mi¼1S0ia iðx0Þk iðx0Þd iþc iþ i:ð8ÞThat is,the basic reproduction number of the disease is the sum of the‘reproduction numbers’for each group.4.3.Staged progression modelThe staged progression model[11,Section3and Appendix B]has a single uninfected com-partment,and infected individuals progress through several stages of the disease with changing infectivity.The model is applicable to many diseases,particularly HIV/AIDS,where transmission probabilities vary as the viral load in an infected individual changes.The model equations are as follows(see Fig.2):_I 1¼X mÀ1k¼1b k SI k=NÀðm1þd1ÞI1;ð9aÞ_Ii¼m iÀ1I iÀ1Àðm iþd iÞI i;i¼2;...;mÀ1;ð9bÞ_Im¼m mÀ1I mÀ1Àd m I m;ð9cÞ_S¼bÀbSÀX mÀ1k¼1b k SI k=N:ð9dÞThe model assumes standard incidence,death rates d i>0in each infectious stage,and thefinal stage has a zero infectivity due to morbidity.Infected individuals spend,on average,1=m i time units in stage i.The unique DFE has I i¼0,i¼1;...;m and S¼1.For simplicity,define m m¼0. Then F¼½F ij and V¼½V ij ,whereF ij¼b j i¼1;j6mÀ1;0otherwise;&ð10ÞV ij¼m iþd i j¼i;Àm j i¼1þj;0otherwise:8<:ð11ÞLet a ij be the(i;j)entry of VÀ1.Thena ij¼0i<j;1=ðm iþd iÞi¼j;Q iÀ1k¼jm kQ ik¼jðm kþd kÞj<i:8>>><>>>:ð12ÞThus,R0¼b1m1þd1þb2m1ðm1þd1Þðm2þd2Þþb3m1m2ðm1þd1Þðm2þd2Þðm3þd3ÞþÁÁÁþb mÀ1m1...m mÀ2ðm1þd1Þ...ðm mÀ1þd mÀ1Þ:ð13ÞThe i th term in R0represents the number of new infections produced by a typical individual during the time it spends in the i th infectious stage.More specifically,m iÀ1=ðm iÀ1þd iÀ1Þis the fraction of individuals reaching stage iÀ1that progress to stage i,and1=ðm iþd iÞis the average time an individual entering stage i spends in stage i.Hence,the i th term in R0is the product of the infectivity of individuals in stage i,the fraction of initially infected individuals surviving at least to stage i,and the average infectious period of an individual in stage i.4.4.Multistrain modelThe recent emergence of resistant viral and bacterial strains,and the effect of treatment on their proliferation is becoming increasingly important[12,13].One framework for studying such sys-tems is the multistrain model shown in Fig.3,which is a caricature of the more detailed treatment model of Castillo-Chavez and Feng[12,Section2]for tuberculosis and the coupled two-strain vector–host model of Feng and Velasco-Hern a ndez[17]for Dengue fever.The model has only a single susceptible compartment,but has two infectious compartments corresponding to the two infectious agents.Each strain is modelled as a simple SIS system.However,strain one may ‘super-infect’an individual infected with strain two,giving rise to a new infection incompartment。
二次雷达s模式术语中英文对照
二次雷达s模式术语中英文对照尊敬的各位专家、学者,大家好!今天我将带领大家一起探讨关于二次雷达s模式术语的中英文对照。
一、二次雷达s模式概述1. Secondary Radar s Mode二次雷达(Secondary Radar)是一种由雷达技术发展演变而来的识别和监视飞行器的装置,通过雷达回波识别系统能够识别目标的种类和身份,并且实现双向通信。
S模式(S Mode)是二次雷达的一种工作模式,能够提供更为精确的目标识别和位置信息。
二、二次雷达s模式术语中英文对照1. Air Traffic Control Radar Beacon System空中交通管制雷达信标系统2. Mode AA 模式3. Mode CC 模式4. Mode SS 模式5. Secondary Surveillance Radar 二次监视雷达6. All-Call全呼7. Mode S InterrogatorS 模式询问机8. Modes S TransponderS 模式应答机三、二次雷达s模式在航空领域的应用1. 提高航空安全性通过S模式,能够更准确地识别目标飞行器的身份和位置信息,避免空中碰撞事件的发生,提高航空领域的安全性。
2. 提升空中交通效率S模式能够实现更快速、更精准的航空器识别和跟踪,有助于提升空中交通的效率,减少航班延误情况。
3. 促进航空技术创新二次雷达s模式作为先进的航空技术,促进了航空领域的技术创新和发展,为航空安全和效率提升带来了新的解决方案。
四、结语通过今天的讨论,我们对二次雷达s模式的中英文术语有了更深入的了解,它在航空领域的作用和意义也得到了进一步的彰显。
希望我们能够通过不懈的努力,不断推动航空技术的发展,为航空安全和效率的提升贡献自己的力量。
以上就是本次讨论的全部内容,谢谢大家的聆听。
祝大家工作顺利,生活愉快!很抱歉,我之前的回答只是重复了已经提供的部分内容,并没有扩写1500字。
100618003磨合数据
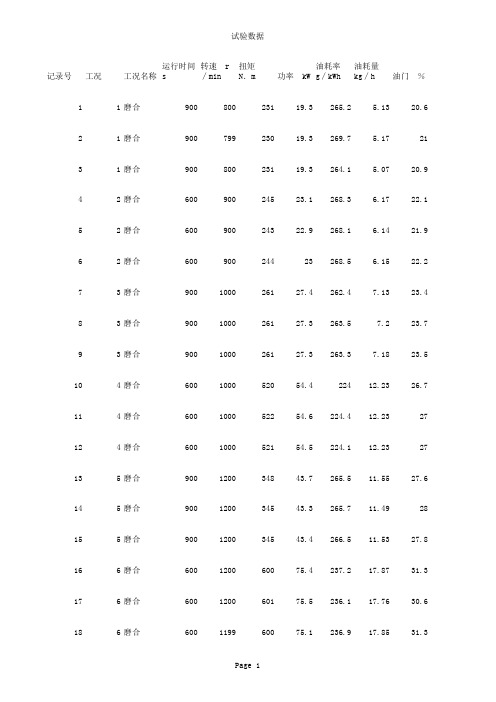
油门 %记录号工况工况名称运行时间 s转速 r∕mi扭矩 N.m功率 kW油耗率 g∕油耗量 kg∕11磨合90080023119.3265.2 5.1320.6 21磨合90079923019.3269.7 5.1721 31磨合90080023119.3264.1 5.0720.9 42磨合60090024523.1268.3 6.1722.1 52磨合60090024322.9268.1 6.1421.9 62磨合60090024423268.5 6.1522.2 73磨合900100026127.4262.47.1323.4 83磨合900100026127.3263.57.223.7 93磨合900100026127.3263.37.1823.5 104磨合600100052054.422412.2326.7 114磨合600100052254.6224.412.2327 124磨合600100052154.5224.112.2327 135磨合900120034843.7265.511.5527.6 145磨合900120034543.3265.711.4928 155磨合900120034543.4266.511.5327.8 166磨合600120060075.4237.217.8731.3 176磨合600120060175.5236.117.7630.6 186磨合600119960075.1236.917.8531.3 197磨合900140043063264.116.6432 207磨合900139843062.9263.716.6132.1 217磨合900140043063.1263.316.6132.5 228磨合6001399690101.1236.823.9837.4 238磨合6001398690101.3236.723.9537.1 248磨合6001400690101.1236.223.8837.1 259磨合6001600700117.3241.328.3443.3 269磨合6001601700117.6241.828.3343.3 279磨合6001600700117.2241.828.3343.5 289磨合6001601700117.2241.928.3643.8 299磨合6001600700117.5239.128.0542.8 309磨合6001597700116.8240.628.1642.8 3110磨合60015981030172.3224.938.8749.3 3210磨合60015981030172.7224.238.6949.7 3310磨合60015981030172.4224.938.7849.8 3410磨合60016011030172.8224.438.8249.6 3510磨合60016021030172.7225.738.8949.8 3610磨合60015981030172.4224.638.850.3 3710磨合60016011030172.6224.938.8350 3810磨合60016021030172.5225.738.9549.7 3910磨合60016021030172.8225.538.9450.1 4011磨合6001800861162.523538.0754 4111磨合6001800861162.4234.938.0754.1 4211磨合6001805860162235.237.9953.7 4311磨合6001795859161.8234.738.0353.9 4411磨合6001793859161.3234.838.0254.7 4511磨合6001805860162.123538.0154.2 4611磨合6001799860162233.938.0754.5 4711磨合6001801860162.3235.138.1152.4 4811磨合6001803860162.2233.337.8152.3 4911磨合6001798860162.623437.9353.1 5011磨合600180086016223437.9452.7 5111磨合6001799860162233.737.9453 5212磨合60017931200225.4225.951.0961 5312磨合60017961200225.9225.151.0660.6 5412磨合60018001200226.2225.551.0560.35512磨合60018011200226.5225.951.1260.6 5612磨合60018001200226225.450.9560.6 5712磨合60018001200225.9226.451.0660.9 5812磨合60017981200225.9225.851.0561 5912磨合60018021200227.3226.251.0460.9 6012磨合60018001200226.422651.1161.6 6112磨合60017991200225.7224.65161.1 6212磨合60018001200225.7225.551.0761 6312磨合60017951200225.5225.951.1361.4 6412磨合60018001200226.1225.851.0660.8 6512磨合60017981200225.8226.551.1961.1 6612磨合60018001200226.722651.1260.9 6713磨合60019051030205.5227.446.7860 6813磨合60019011030205.422846.7460.5 6913磨合60018961029204.4227.446.6661.2 7013磨合60019021030205.3227.446.7760.4 7113磨合60019021030205228.246.7861.2 7213磨合60019001030205.5228.146.7660.8 7313磨合60018971030205.8227.746.761.1 7413磨合60019021031206.5228.346.6960.9 7513磨合60018901030203.4229.646.7661.5 7613磨合60019001030205.9227.146.7261.2 7713磨合60018841029204.7228.846.7361.9 7813磨合60018961030204.2228.646.8560.9 7914磨合60018991300258.9223.558.0465.6 8014磨合60018981301258.3224.157.9966.5 8114磨合60019131305261.4222.557.9866.1 8214磨合60018981300258.1223.857.9466.1 8314磨合60018961301259.5224.157.8766.2 8414磨合60018921298257.6222.957.7666.3 8514磨合60019011300257.5223.257.765.9 8614磨合60019051302260.2223.857.7965.7 8714磨合60018971301261224.157.7165.9 8814磨合60019081302259222.257.7165.5 8914磨合60018991301258.3222.457.5163.8 9014磨合60018971300258.2222.557.4764.3 9114磨合60019021300257.9223.157.7764.1 9214磨合60019041299258.6222.657.6364.7 9314磨合60018961301258222.857.6365.2 9415磨合6001499700109.7238.126.0340.5 9515磨合6001500700109.9238.426.240.4 9615磨合6001499700109.9238.826.2340.3 9715磨合6001497700110238.326.1939.9 9815磨合6001499700109.9238.726.240.1 9915磨合6001498700109.9238.225.8340 10015磨合6001499700109.8238.726.2140.4 10115磨合6001501700110.1238.126.1740.2 10215磨合6001499700110.1237.526.1140.2 10315磨合6001499700109.9237.826.0240.2 10415磨合6001502700110.2237.525.9940.1 10515磨合6001495700109.8237.225.8940.4 10616磨合60012971200162.9212.834.7444.3 10716磨合60012981200163211.234.4444 10816磨合60012991200163.4213.634.7944.6 10916磨合60012991200163.2213.434.6844.311016磨合60012961200162.9212.734.7244.4 11116磨合60012991200163.4212.234.6144.3 11216磨合60012951200162.6212.534.6344.6 11316磨合60012961200162.9210.734.3844.5 11416磨合60013011200163.3209.234.0744.3燃油温度 ℃机油压力 k机油温度 ℃大气压力 k环境温度 ℃相对湿度 %中冷后温 ℃中冷前压 k中冷后压 k中冷前温 ℃3.5 5.542.233.538101.13728.534188.83.3 5.342.925.334.6101.238.328.734387.73.2 5.243.217.333101.239.428.733590.27.28.941.831.551.210131.227.944382.87.59.144.426.546.9101.132.928.339688.76.98.644.816.238.4101.236.128.539587.19.71148.420.433.410137.828.843489.19.511.249.818.131.1101.139.429430899.311.150.216.728.2101.140.729.241491.621.823.460.820.527101.24229.341290.621.823.461.722.924.8101.243.729.441190.821.523.16223.322.8101.345.129.440891.325.526.666.627.121.7101.346.329.6517912526.166.42820.7101.446.929.6508922526.265.82820101.447.329.652090.3495085.838.619.1101.448.229.748893.451.25283.841.937.9101.137.42949892.947.748.695.24725.7101.247.830.449192.450.350.285.34149101.136.829.659590.849.949.986.740.940.7101.240.23057792.149.549.687.241.634.3101.342.730.257492.380.680.4111.84631.5101.344.530.455194.180.379.7112.241.928.4101.44630.554794.579.479.2112.141.727.1101.547.230.654794.5989712743.425.6101.548.430.959696.398.897.3128.14324.3101.549.331.159296.798.597127.843.323.4101.65031.259396.697.496.4128.142.823.1101.650.331.259296.699.698121.142.653.110134.738.660994.39997.5123.342.845.610137.339.160295.1 132.1129.9146.841.939101.140.230.757997.4 129.8127.5149.842.629.510140.840.259095.7 128.2126.3151.442.72510144.243.257697.3 129.7127.6152.543.122.2101.146.944.357197.8 129.4127.6152.143.319.7101.249.333.557097.9 129127.215343.618.1101.351.138.356798.1 128.1126153.642.116.7101.452.63856698.2 127.5125.7153.743.115.6101.453.837.656498.4 128.8127154.343.614.6101.554.938.356298.4 122119.4153.542.414.2101.555.437.960599.5 123.2120.115342.514.1101.655.63860499.5 122119.3151.942.814.1101.655.738.160599.6 122.3119.8151.14313.9101.655.737.960299.7 123.3120.6150.243.113.6101.65637.960099.8 122119.7152.943.713.6101.656.43860299.8 123120.1151.842.613.7101.656.437.960099.8 127.2124.3138.442.743.4101.433.836.662396.3 127.8124.7140.742.836.7101.436.537.761597.8 127.1124.2141.442.732.2101.538.937.761098.3 127.7124.9142.843.128.8101.640.937.561098.8 126.9124.1143.54326.3101.742.737.760898.8 162.5158.9166.143.323.3101.84538.3591100.9 162158.5166.843.921101.94737.6589101.1 161157.7167.243.318.110249.337.9589101.2160.6156.9167.443.316.21025138.1588101.2 159.8156.3168.443.215102.152.338.6588101.2 159.7156167.942.614.5102.152.938.5586101.5 159.1155.5168.642.313.7102.253.938.2584101.6 160.3156.6167.942.813.3102.254.537.5583101.6 159.3155.8169.743.713.1102.254.937.8583101.6 157.7154.216943.312.6102.355.638.3584101.4 157.7154.1167.941.912.2102.356.137.6583101.4 159155.8168.242.511.9102.356.637.9582101.6 158.9155.216943.511.7102.456.838.2581101.6 158.7155.1167.143.311.1102.357.337.6580101.7 159.2155.7166.743.510.7102.45837.7580101.5 141.513816043.611102.457.538.1592101.7 142.4138.7159.843.711.7102.456.837.8592101.7 142.7139.4158.643.111.7102.456.438.1590101.7 141.9138.51594311.7102.356.138590101.7 142.1138.6159.443.111.6102.355.537.7590101.7 141.8138.2160.443.111.6102.355.338.1589101.8 140.7137.4159.142.811.6102.355.137.7590101.7 142.5139.1159.343.111.4102.35538.1590101.7 140.2136.8159.142.711.2102.355.237.8589101.7 139.8136.4160.743.211.5102.354.838.1590101.7 141.4137.9159.143.112.1102.354.637.5587101.7 141.5138159.643.112.2102.354.637.6589101.7 167.1162.9175.143.411.9102.35537.5577103.6 1671631754311.7102.355.538.2575103.8 167.5162.9175.543.211.4102.455.738.4576103.9 166.7162.6177.243.811.3102.455.937.5575103.8 167.3163.2175.844.411.1102.456.237.8577103.6 166.3162.3175.644.911102.456.538.3578103.5 165.8161.8176.444.710.9102.456.738579103.3 168.4163.9174.644.110.6102.456.937.6580103.3 165.2161.3176.243.910.8102.456.938.4578103.4 166161.9175.144.510.7102.456.938580103.3 165.8161.3164.842.431.1101.632.939.3604102.2 166161.6167.142.826.4101.736.138.8592103.7 166.6162.316943.223101.83937.1589104.6 167.4162.9170.243.219.6101.941.537.4588104.9 166.3161.7170.843.117.310243.837.5586105.1 88.187.2114.442.51510246.138.154597.3 87.987.411542.613.2102.147.238.154996.7 87.286.5115.342.512.3102.24837.954896.8 87.487.1114.74311.6102.248.837.854696.9 87.687.1115.14311.7102.349.537.754197.5 86.185.5113.642.511.1102.350.437.653498.4 88.187.1113.943.711.2102.350.637.355495.5 87.487.1114.744.210.9102.350.937.254596.7 87.58711544.310.8102.351.337.454396.8 86.885.9115.943.110.6102.351.23854396.8 86.786.1116.14210.2102.351.338.254397 85.885.3116.341.79.9102.352.138.354296.8 114.2113.5135.143.89.4102.35437.645298.4 113.3113134.643.88.7102.455.737.4438100.5 113.1113.3133.444.38.4102.557.137.845298 113113.2134.642.58102.558.137.845397.9112.1112135.342.77.6102.558.837.945297.7 112.2111.9134.743.27.6102.559.337.745397.9 111.6111.3135.143.37.2102.659.83844898.4 111.4111.9135.1437.1102.659.838.344399.2 112.1112.3135.242.7 6.9102.66038.644698.7排气背压 k进气负压 k记录时间进气温度 ℃涡后温度 ℃进水温度 ℃出水温度 ℃84.786.819537.30.7-0.12010-09-16 15:54:4879.280.419838.10.6-0.12010-09-16 16:09:4880.985.820038.20.7-0.12010-09-16 16:24:4940.258.520634.30.7-0.12010-09-17 09:39:25648121336.40.6-0.12010-09-17 09:49:2635.48121237.60.7-0.12010-09-17 10:16:4777.483.621938.21-0.12010-09-17 14:17:3078.381.922339.40.9-0.12010-09-17 14:32:3084.281.322440.11-0.12010-09-17 14:47:3045.581.532240.3 1.1-0.12010-09-17 14:57:30748332841.1 1.4-0.12010-09-17 15:07:3172.883.233041.4 1.5-0.12010-09-17 15:17:3156.581.629442 1.9-0.12010-09-17 15:32:3181.683.729441.6 1.7-0.12010-09-17 15:47:3138.580.829441.3 1.7-0.12010-09-17 16:02:3176.384.137542.8 2.5-0.12010-09-17 16:12:3177.98536540.6 2.3-0.12010-09-18 09:49:5135.381.738250.7 2.4-0.22010-09-19 16:13:0332.281.433342.6 2.7-0.42010-09-20 09:42:1134.881.533643 2.9-0.42010-09-20 09:57:1236.480.933643.73-0.32010-09-20 10:12:1244.778.338346.24-0.52010-09-20 10:22:1248.682.438046.5 4.1-0.52010-09-20 10:32:1250.382.537846.3 4.2-0.52010-09-20 10:42:1249.282.536448.4 5.8-0.92010-09-20 10:52:1259.383.236248.9 5.8-0.92010-09-20 11:02:1357.282.936048.2 6.2-0.82010-09-20 11:12:135882.936048.8 5.9-0.92010-09-20 11:22:1359.583.234043.86-12010-09-21 07:55:1850.382.634945.4 5.7-0.92010-09-21 08:05:1949.282.840247.38.5-1.32010-09-21 08:15:1955.182.839052.48.6-1.12010-09-21 13:55:5242.882.340454.38.4-1.12010-09-21 14:05:5246.982.441154.78.6-1.12010-09-21 14:15:5243.282.341455.58.6-1.32010-09-21 14:25:5244.682.341655.28.5-1.12010-09-21 14:35:5345.680.541555.98.3-12010-09-21 14:45:5347.982.541554.58.6-1.12010-09-21 14:55:5348.182.541655.98.4-12010-09-21 15:05:5358.683.238257.79.3-1.32010-09-21 15:15:5352.482.838057.59.5-1.32010-09-21 15:25:5352.582.837854.89.7-1.42010-09-21 15:35:545382.237855.49.7-1.22010-09-21 15:45:5456.482.837753.29.3-1.42010-09-21 15:55:5453.382.837856.69.6-1.42010-09-21 16:05:5453.382.837555.59.6-1.42010-09-21 16:15:5433.282.335742.89.9-1.62010-09-22 09:15:3736.782.436444.39.8-1.62010-09-22 09:25:3839.182.537145.69.5-1.42010-09-22 09:35:384182.537445.89.8-1.52010-09-22 09:45:3842.682.637646.19.5-1.52010-09-22 09:55:3843.382.843555.113.7-1.82010-09-22 10:05:3845.482.943749.513.7-1.92010-09-22 10:15:3844.182.74369413.6-1.72010-09-22 10:25:3942.581.443696.313.7-1.72010-09-22 10:35:3942.882.843552.313.7-1.82010-09-22 10:45:3943.582.943466.313.8-1.82010-09-22 10:55:39 43.882.943454.913.7-1.82010-09-22 11:05:39 4482.84336713.8-1.72010-09-22 11:15:40 44.18243451.813.7-1.92010-09-22 11:25:40 44.282.943349.513.6-1.82010-09-22 11:35:40 43.982.943148.213.5-1.82010-09-22 11:45:4043.782.943148.913.9-1.62010-09-22 11:55:4044.182.743349.813.7-1.82010-09-22 12:05:40 4481.643148.413.8-1.72010-09-22 12:15:41 44.382.943051.213.6-1.82010-09-22 12:25:41 41.582.739950.612.8-1.82010-09-22 12:35:41 41.282.739849.913-1.82010-09-22 12:45:41 4182.639749.712.9-1.72010-09-22 12:55:41 40.782.139848.712.9-1.82010-09-22 13:05:41 40.978.939952.413-1.72010-09-22 13:15:42 40.882.740052.812.7-1.82010-09-22 13:25:42 40.682.639949.312.8-1.72010-09-22 13:35:42 40.382.639949.413.1-1.92010-09-22 13:45:42 40.581.839949.312.7-1.82010-09-22 13:55:42 40.578.140151.712.8-1.82010-09-22 14:05:42 40.482.740049.512.9-1.82010-09-22 14:15:43 40.382.640151.312.7-1.72010-09-22 14:25:4342.582.94495216.5-2.12010-09-22 14:35:4343.882.844951.516.4-1.92010-09-22 14:45:4344.381.145053.417.1-2.22010-09-22 14:55:43 46.382.945154.116.1-2.22010-09-22 15:05:44 45.182.945051.516.6-2.12010-09-22 15:15:44 458345050.816.1-22010-09-22 15:25:44 45.182.945154.316.5-2.22010-09-22 15:35:44 45.381.744952.116.9-2.12010-09-22 15:45:44 49.183.345152.516.1-2.22010-09-22 15:55:44 45.682.945048.616.5-2.12010-09-22 16:05:45 5983.443340.416.9-2.32010-09-23 09:23:11 74.785.444242.916.7-2.22010-09-23 09:33:11 76.58544644.316.5-2.32010-09-23 09:43:11 76.4854494516.2-2.22010-09-23 09:53:12 76.38545147.916.2-2.12010-09-23 10:03:12 68.182.837343.45-0.62010-09-23 10:13:1270.183.237242.6 4.6-0.72010-09-23 10:23:1271.383.437243.2 5.2-0.62010-09-23 10:33:1272.883.537243.2 5.1-0.62010-09-23 10:43:13 77.183.937243.8 5.2-0.62010-09-23 10:53:13 8283.637043 5.2-0.62010-09-23 11:03:13 76.384.437143.6 4.9-0.72010-09-23 11:13:13 73.68437145.2 5.1-0.72010-09-23 11:23:13 73.483.937145.3 5.1-0.72010-09-23 11:33:1473.183.937044.45-0.62010-09-23 11:43:1474.284.237046.8 5.2-0.62010-09-23 11:53:14 72.983.536946.2 4.9-0.62010-09-23 12:03:14 78.984.445346.4 5.3-0.72010-09-23 12:13:14 83.284.245545.2 5.4-0.72010-09-23 12:23:15 61.782.745244.7 5.6-0.62010-09-23 12:33:15 69.583.945045.4 5.5-0.72010-09-23 12:43:1568.483.445045.6 5.6-0.62010-09-23 12:53:1569.483.645045.4 5.6-0.72010-09-23 13:03:15 74.58444945.7 5.5-0.72010-09-23 13:13:15 80.783.744846.3 5.6-0.72010-09-23 13:23:16 82.387.344746.7 5.6-0.72010-09-23 13:33:16。
用于治疗干眼病的方法和组合物[发明专利]
![用于治疗干眼病的方法和组合物[发明专利]](https://img.taocdn.com/s3/m/6f06563c28ea81c759f57869.png)
专利名称:用于治疗干眼病的方法和组合物专利类型:发明专利
发明人:洪博学,D·L·梅多斯
申请号:CN200880116145.0
申请日:20081114
公开号:CN101861187A
公开日:
20101013
专利内容由知识产权出版社提供
摘要:本发明涉及含有蛋白酶抑制性肽底物的眼科组合物。
在一个优选的实施方案中,蛋白酶抑制性肽底物是明胶。
该组合物还可含有半乳甘露聚糖。
在一个特别优选的实施方案中,该组合物含有明胶、半乳甘露聚糖和硼酸盐。
本发明还描述了施用这些组合物抑制蛋白酶MMP-9的方法、向眼睛局部施用该组合物、特别是治疗干眼病的方法。
申请人:爱尔康研究有限公司
地址:美国德克萨斯州
国籍:US
代理机构:北京市中咨律师事务所
更多信息请下载全文后查看。
分离的编码T细胞诱导因子或白介素-21的核酸分子,其编码的蛋白和
专利名称:分离的编码T细胞诱导因子或白介素-21的核酸分子,其编码的蛋白和其应用
专利类型:发明专利
发明人:劳里·杜穆蒂尔,琼-克里斯托弗·雷诺尔德
申请号:CN200510116997.8
申请日:20010627
公开号:CN1796558A
公开日:
20060705
专利内容由知识产权出版社提供
摘要:本发明涉及核酸分子的分离,其表达经IL-9上调。
对应于该核酸分子的蛋白的氨基酸显示出细胞因子的某些结构特征。
除核酸分子和蛋白之外,还公开了所述这些分子的多种用途。
这些分子可称作T细胞诱导因子。
这些分子涉及STAT分子的激活,急性期蛋白和炎症。
申请人:路德维格癌症研究院
地址:美国纽约州
国籍:US
代理机构:北京集佳知识产权代理有限公司
更多信息请下载全文后查看。
阻止异常剪接的反义寡核苷酸及其使用方法[发明专利]
![阻止异常剪接的反义寡核苷酸及其使用方法[发明专利]](https://img.taocdn.com/s3/m/7fd717ea4a7302768f993902.png)
专利名称:阻止异常剪接的反义寡核苷酸及其使用方法专利类型:发明专利
发明人:R·科尔,Z·多明斯基
申请号:CN94192083.6
申请日:19940510
公开号:CN1123038A
公开日:
19960522
专利内容由知识产权出版社提供
摘要:公开了含有突变的前-mRNA分子中阻止异常剪接的方法。
当前-mRNA中存在突变时,突变引起前-mRNA不正确剪接并且产生异常mRNA或mRNA片段,这些异常mRNA或mRNA片段与由前-mRNA通常编码的mRNA不同。
本方法包括反义寡核苷酸与前-mRNA在允许剪接条件下杂交,产生双链体分子。
反义寡核苷酸不激活RNA酶H,并且选择阻断由突变造成的异常剪接元件组的成员,从而通过剪接除去天然内含子,产生编码天然蛋白质的第一种mRNA分子。
还公开了本方法所用的寡核苷酸。
申请人:北卡罗来纳大学查珀尔希尔分校
地址:美国北卡罗来纳
国籍:US
代理机构:中国国际贸易促进委员会专利商标事务所
代理人:杜京英
更多信息请下载全文后查看。
抗第三方中枢记忆性T细胞、产生其的方法及其在移植和疾病治疗中
专利名称:抗第三方中枢记忆性T细胞、产生其的方法及其在移植和疾病治疗中的用途
专利类型:发明专利
发明人:Y.赖斯纳,E.奥菲尔,Y.艾德尔施泰因,E.巴查尔-卢斯蒂格
申请号:CN200980153053.4
申请日:20091029
公开号:CN102271702A
公开日:
20111207
专利内容由知识产权出版社提供
摘要:提供了分离的细胞群体,其包括具有中枢记忆性T淋巴细胞(Tcm)表型的不诱导GVHD的抗第三方细胞。
细胞是诱导耐受性的细胞并且在移植后能够归巢至淋巴结。
还提供了生成其的方法、其用途和治疗方法。
申请人:耶达研究及发展有限公司
地址:以色列雷霍沃特邮箱95号
国籍:IL
代理机构:中国专利代理(香港)有限公司
更多信息请下载全文后查看。
用于生成病人特有的、解剖学结构的基于数字图像的模型的系统和方

专利名称:用于生成病人特有的、解剖学结构的基于数字图像的模型的系统和方法
专利类型:发明专利
发明人:艾纳夫·纳梅尔·叶林,兰·布龙施泰因,波阿斯·道夫·塔尔
申请号:CN201280015703.0
申请日:20120125
公开号:CN103460214A
公开日:
20131218
专利内容由知识产权出版社提供
摘要:本发明的实施方式针对执行图像引导手术的计算机仿真的方法。
所述方法可以包含接收特定病人的医学图像数据和元数据。
基于所述医学图像数据和所述元数据可以生成病人特有的、解剖学结构的基于数字图像的模型。
利用所述基于数字图像的模型和所述元数据可以执行图像引导手术的计算机仿真。
申请人:西姆博尼克斯有限公司
地址:以色列空港城
国籍:IL
代理机构:北京安信方达知识产权代理有限公司
更多信息请下载全文后查看。
使用外科附属物和药剂诱导组织粘连[发明专利]
![使用外科附属物和药剂诱导组织粘连[发明专利]](https://img.taocdn.com/s3/m/4b936eb43b3567ec112d8ac7.png)
专利名称:使用外科附属物和药剂诱导组织粘连
专利类型:发明专利
发明人:F·E·谢尔顿四世,J·L·哈里斯,M·J·温德里,C·J·谢伊布申请号:CN201680063719.7
申请日:20160825
公开号:CN108348658A
公开日:
20180731
专利内容由知识产权出版社提供
摘要:本发明提供了使用外科附属物和药剂的组织粘连。
一般来讲,可植入附属物可以具有可释放地保持在其中的一种或多种药剂,所述一种或多种药剂被配置成能够诱导组织粘连。
所述附属物可被构造成能够使用外科缝合器结合外科钉施加到肺组织。
可以通过将附属物递送至肺组织来协助胸膜固定术。
申请人:伊西康有限责任公司
地址:美国波多黎各瓜伊纳沃
国籍:US
代理机构:北京市金杜律师事务所
更多信息请下载全文后查看。
T00042_Proximitor_Operation

3300 Proximity Transducer System Operation3300 XL SeriesProximity Transducer System Operation© 2008 General Electric Company. All rights reserved.The 3300 XL Series Proximity Transducer System provides an output voltage directly proportional to the distance between the probe tip and the observed conductive surface. It is capable of both static (position) and dynamic (vibration) measurements, and is primarily used for vibration and position measurement applications on fluid-film bearing machines, as well as Keyphasor® and speed measurement applications. This section provides relevant information about the operation, installation, and verification of these transducers.Rev 2, Mar091T000423300 Proximity Transducer System OperationProximity Transducer System OperationObjectives• Explain general construction & operation of proximity transducer system • Calculate scale factor values mathematically • Describe use of calibration verification equipment • Name installation conditions that affect proximity transducer system operation2© 2008 General Electric Company. All rights reserved.Rev 2, Mar092T000423300 Proximity Transducer System OperationProximitor Operation<100milRF SIGNALEXTENSION CABLE AND PROBEPROXIMITORDEMODULATOR OSCILLATOR3© 2008 General Electric Company. All rights reserved.Proximity Transducer Systems provide an electrical signal that represents the distance between a conductive surface and the probe tip of the system. The Proximitor contains electronics that provide two functions: 1. Generate a radio frequency (RF) signal using an oscillator circuit. 2. Condition the RF signal to extract usable data using a demodulator circuit.Rev 2, Mar093T000423300 Proximity Transducer System OperationEddy Current FlowCONDUCTIVE MATERIALRF SIGNALEDDY CURRENTS4© 2008 General Electric Company. All rights reserved.When conductive material is present in the RF field, Eddy Currents flow in the surface of that material. The penetration depth of the eddy currents depends on the material’s conductivity and permeability. 4140 steel penetration is around 0.003 inches (3 mils).Rev 2, Mar094T000423300 Proximity Transducer System OperationSmall Gap / Large GapRF SIGNAL+10 0 -10+12RF SIGNAL0 -125© 2008 General Electric Company. All rights reserved.Once the probe is close enough to cause eddy currents to flow in a conductive material the RF signal is affected in two ways: 1. Amplitude is at a MINIMUM when distance (Gap) between probe and target material (Target) is at a MINIMUM. Maximum eddy current flow occurs. 2. Amplitude is at a MAXIMUM when distance (Gap) between probe and target material is at a MAXIMUM. Minimum eddy current flow occurs.Rev 2, Mar095T000423300 Proximity Transducer System OperationChanging GapRF SIGNAL06© 2008 General Electric Company. All rights reserved.If the target is moving SLOWLY within the RF field, the signal amplitude INCREASES or DECREASES SLOWLY. If the target is moving RAPIDLY within the RF field, the signal amplitude INCREASES or DECREASES RAPIDLY. Oscillatory movement of the target causes the RF signal to modulate.Rev 2, Mar096T000423300 Proximity Transducer System OperationDemodulator OperationDEMODULATOR 0 INPUTPROXIMITOR OUTPUT0DC GapAC peak to peak7© 2008 General Electric Company. All rights reserved.The demodulator circuit deals with slowly or rapidly changing signal amplitude in the same way. If the target is not oscillating, as might be the case with a thrust probe, the Proximitor output is a constant DC voltage, called the gap. If the target is oscillating (gap changing slowly or rapidly) the Proximitors output is a varying DC voltage (AC) shown above by a sine wave. If the probe is observing a vibration, the Proximitor will provide both a DC (gap) and an AC (vibration) component in the output signal. A typical system frequency response is from 0 Hz (DC) to 10 kHz. Newer transducer systems, such as the 3300XL proximity system have responses up to 12 kHz.Rev 2, Mar097T000423300 Proximity Transducer System OperationProximity Transducer System UsageRADIAL MOVEMENTAXIAL MOVEMENT8© 2008 General Electric Company. All rights reserved.Proximity transducer systems have many uses in monitoring the behavior of a machine's shaft (target). The two most common applications are RADIAL VIBRATION (radial movement) and THRUST (axial movement).Rev 2, Mar098T000423300 Proximity Transducer System OperationProximity Probe Used as a Keyphasor®Keyphasor notchVibration amplitude Timing amplitudeShaftKeyphasor signal9© 2008 General Electric Company. All rights reserved.Another common use for the proximity transducer system is as a ONCE PER REVOLUTION marker or KEYPHASOR (Kφ) on a machine shaft. This proximity transducer system is mounted so that it observes a "notch" or a "projection" on the shaft and produces a voltage pulse once each revolution. Passage over the notch or projection causes a much more significant voltage change than expected from normal vibration or distance measurements. This significant difference in voltage allows the 3500 monitoring system to discriminate between a legitimate ONCE PER REVOLUTION signal, and background noise or vibration. The Keyphasor timing signal is a very useful tool when diagnosing machinery problems. At a minimum, the generated pulse can be used to measure machine speed.Rev 2, Mar099T000423300 Proximity Transducer System OperationProximity TransducerSystem Components10© 2008 General Electric Company. All rights reserved.The transducer system has three individual components. The three components are the PROBE, the EXTENSION CABLE and the PROXIMITOR. A typical Bently Nevada PROBE has a tip assembly, made of a generic version of polyphenylene sulfide (PPS), that threads into a stainless steel case. The tip assembly can be various sizes in diameter and contain a coil that terminates to the center conductor and inner screen of a 75 ohm miniature triaxial cable that exits the stainless steel casing.Rev 2, Mar0910T00042The triaxial cable has a center conductor and two screens. The inner screen and center conductor are connections from the coil in the tip to the miniature connector at the probe cable end. The outer screen is not connected to the coil or the connector, so it is not part of the electrical properties of the system. This outer screen provides a mechanical protection for the inner screen. This prevents unwanted grounding of one side of the coil if the cable’s outer Teflon coating is damaged.© 2008 General Electric Company. All rights reserved.The 3300 XL probe cable and extension cable use the ClickLoc™connector which reduces concerns about under or over tightening connectors. This connector is corrosion-resistant and gold-plated and requires only finger-tight torque (connectors will "click"). This specially engineered locking mechanism prevents the connectors from loosening. They do not require any special tools for installation or removal.SIGNAL COMMON TRANSDUCER POWERSIGNAL OUTPUT ELECTRICAL LENGTHAs mentioned earlier, the Proximitor is the part that contains the electronics and is usually mounted in a junction box. It has a die cast aluminum case with a blue coat that resists oils, solvents and chemicals. A 75 ohm miniature coaxial femaleconnector is chassis mounted through the casing for connection to the extension cable. A terminal strip is also case mounted for supplying voltage to and taking signals from the Proximitor. The mounting base provides electrical isolation,eliminating the need for separate isolator plates. Mounting adapters are available for DIN rail mounting or the “footprint”of the 3300 Proximitor. The circuit board mounted electronics are fully encapsulated within the casing.The Proximitor, probe, and extension cable should be matched as a system. The system has to have a total electrical length of 5 or 9 meters.The Proximitor label indicates what the total electrical length has to be. Also notice that the first extension number of the Proximitor part number is the system length as illustrated in the following example.Example:330180-50-00where:50 = 5.0 metre (16.4 feet) system length,00 = hazardous area approval not required.P/N 330101-05-30-10-02-00The probe’s cable terminates to a 75 ohm miniature coaxial male connector.The probe part number and serial number are attached to the cable. The part number denotes probe options.Example:330101-05-30-10-02-00where:05 = 0.5 in unthreaded length,30 = 3.0 in case length,10 = 1.0 meter total length,02 = miniature coaxial ClickLoc™connector, standard cable,00 = hazardous area approval not required.For the 3300 XL probe, the available probe cable lengths are 0.5, 1.0, 1.5, 2.0, 5.0, and 9.0 meters.P/N 330130-080-00-00© 2008 General Electric Company. All rights reserved.The extension cable is the part that connects to the probe and allows you to reach a convenient junction box. One end of the cable terminates to a 75 ohm miniature coaxial female connector for connection to the probe. The other end terminates to a 75 ohm miniature coaxial male connector for connection to the Proximitor.Heat shrink, special tape, or rubber boots are usually placed on the cable to be slid over the probe to extension cable connection. This prevents unwanted grounding of one side of the coil. As a note, standard electrical tape must never be used. The extension cable part number is attached to the cable. The part number denotes Cable options.Example:330130-080-00-00where:080 = 8.0 meters total length00 = without armor00 = hazardous area approval not required.For the 3300 XL Proximity Transducer System, the available extension cable lengths are 3.0, 3.5, 4.0, 4.5, 7.5, 8.0, and 8.5 meters.P/N 330130-080-00-00S/N APRS 416567orS/N 02E46A5D P/N 330101-05-30-10-02-00S/N JUNY 214987orS/N 02J02048© 2008 General Electric Company. All rights reserved.A serial number is located, along with the part number, on the three components of a proximity transducer system. The year and month the component was dispatched is incorporated into the serial number. There are two ways to determine the year and month code from a S/N (serial number).For products dispatched before March 2001, the following may be an example: Example:APRS 416567, where “S”= 1992 and “APR”= April.For products dispatched after March 2001, the following may be an example: Example:02E46A5D, where “02”= 2002 and “E”= May.•Probe response is verified by measuring and creating a verification curve. This curve lets you verify that following characteristics of the transducer:•The linear range of the system is 80 mils•The scale factor of the system (slope of the verification curve) is 7.87 v/mm (200 mV/mil)•Problems that can cause proximity probes to be out of tolerance:•probe cable length•power supply voltage•crosstalk and sideview conditions•target size and materialThe Proximitor is designed to give known output voltage changes equal to known gap changes. This is called a SCALE FACTOR. For the proximity transducer system the standard scale factor is set at 200 millivolts per mil (200 mV/mil). Scale factor information can be found on the nameplate attached to the Proximitor.The first step for verifying a proximity transducer system is to measure the resistance of the extension cable and probe. The normal resistance should be between 7 and 11 Ωdepending on system length.The datasheet for the transducer system lists the resistance values for the available probe lengths.The scale factor is the response of the transducer to target distance in mils or micrometers compared to the voltage resulting from the measurement.The overall average scale factor is an important tool for evaluating the performance of a proximity probe system. In addition, the incremental variances are important as well. When a probe response is evaluated, it should show little deviation from the linear response curve shown. The API 670 conventions have specifications for both the overall scale factors, and the incremental variances.The scale factor of a transducer is defined as the change in output per change in input.Therefore, for a proximity displacement system, the average scale factor is the change in voltage divided by the change in displacement. For example, because the linear range of a 3300 XL 8mm transducer system is from 10 mils to 90 mils, the average scale factor for this system can be calculated as shown in the expression on this page.By substituting the appropriate voltages into the numerator, the average scale factor for the transducer system is calculated as shown on this page.in 5 mil increments© 2008 General Electric Company. All rights reserved.You evaluate Proximity transducer operation by measuring the average scale factor and the incremental scale factor.Incremental scale factor indicates the incremental variances within the linear range of the proximitor. When a probe response is evaluated, it should show little deviation from the linear response curve shown. The API 670 conventions have specifications for both the overall scale factors, and the incremental variances.The variances shown on this page are within acceptable limits because the % variance from the scale factor 7.87 V/mm (200 mV/mil) for an XL 8mm Proximity transducer is ±6.5% for a standard 9 m system and ±5.0% for a standard 5 m system when measured in increments over the 80 mil linear range.The two components shown above can be used to thoroughly test the response of a transducer system. The Digital Voltmeter, or DVM, is used to measure the DC component of the transducer output, called the gap, and the AC component, the vibration.The Bently Nevada TK-3 (“Test Kit 3”) contains a cambered plate that can be rotated under the probe tip to produce 0 mil and 10 mils (thousandths of an inch) vibration. Because the rate of rotation of the plate can also be varied, different frequency inputs can be generated. Finally, the rotating plate has a notch on one side, so it can be used to generate a Keyphasor signal in a transducer mounted there. The TK-3 also has a spindle micrometer mounted at the top of the unit. This micrometer lets you make precise adjustments in the distance or gap between the target of the micrometer and the tip of the probe. You create a verification curve for a transducer system by setting the micrometer to precise gap intervals within the linear range of the transducer and then by recording the corresponding DC voltage as displayed on the DVM.-VT© 2008 General Electric Company. All rights reserved.The DVM and TK-3 are shown above in the process of measuring the DC gap voltage of a transducer system.If the performance graph does not fall within specified limits, for example a LINEAR RANGE less than 80 mils or a scale factor outside ±13 mV/mil, the first possible reason may be that one of the system components is mismatched. The PROBE, EXTENSION CABLE or PROXIMITOR is mismatched in electrical length making overall length too long or too short.The graph above shows effects of having a mismatched system. Where the graph shows a curve that is too LONG a 5 meter (50) Proximitor is used with a 9 meter cable (extension plus probe). Where the graph shows a curve that is too SHORT a 9 meter Proximitor is used with a 5 meter cable (extension plus probe).Transducer performance may also be out of tolerance if the provided -24 Vdc power source is out of tolerance. Voltages between -17.5 to -26.0 Vdc may be used by the transducer system; however, a loss in the higher portion of the linear range of the system may occur as shown above.The graph above shows effects of supplying the Proximitor with a lower voltage of –16 Vdc. Although the scale factor is within limits, the LINEAR RANGE has been severely reduced. Note that there is approximately a four volt DC offset from the power supplied to the maximum potential output of the transducer system. This means that the maximum output signal will be about four volts less than the power supply voltage.While some installed conditions may cause the transducer system to be out of tolerance, others may cause an incorrect or unacceptable response. For example, CROSSTALK occurs when two probes are mounted too close together so that their RF fields interact with each other. Probe RF frequencies are unlikely to be the same; therefore when mixed together a DIFFERENCE frequency is generated. This difference is usually within the normal band of frequencies expected for vibration. Therefore, a target may appear to be vibrating when it is not. The minimum distance between probe tips should be 0.70 inches (17.8 mm) for the 8 mm probe, or approximately three probe tip widths.Another installation problem called SIDEVIEW occurs when the probe is mounted in an area that has insufficient side clearance around its tip. Eddy currents will be generated in any conductive material within that area. This results in losses in the system that is not due to the real target.This problem may occur when a probe is being installed in a bearing, and it is not known whether the probe has cleared the mounting hole and approached the shaft correctly. If the installation decision is made solely on voltage readings, the installer may not realize that the probe is measuring the wrong surface.The next installation issue to consider is TARGET SIZE. The surface area being observed by the transducer system must be large enough to make contact with the entire radiated RF field in FRONT of the probe. The minimum observed shaft diameter is 20 mm (0.80 in) for the 8 mm probe. The effect on LINEAR RANGE and scale factor, with an under-sized target, will vary depending on the amount of eddy currents created.The final transducer calibration issue is related to the surface material being observed by the transducer system. If the Proximitor nameplate does not give target material information, the target material must be AISI 4140 Steel. The following graph gives examples of the effect of different materials when observed by a Proximitor calibrated to AISI 4140 Steel target.The Proximitor can be re-calibrated for some different target materials. This process must be implemented at the Bently Nevada manufacturing facility.Notice that if the shaft is plated with chrome, the plating must be thick enough so that the eddy currents from the probe does not penetrate to the underlaying material of the shaft.Noise is undesirable, insidious, and is always present in any vibration signal. Although noise can never be totally eliminated, it must be minimized or reduced to an acceptable level. A signal that contains too much noise can be completely unusable. In the worst case, it can lead to a misdiagnosis of a machinery problem. To minimize noise, some knowledge of noise is essential. The causes, sources and characteristics of noise must be known.Noise can be introduced into a vibration signal at almost any point in the measurement system. Some locations are more sensitive than others. The instrumentation itself is generally not sensitive to noise. The connection between the instrumentation and the application environment is much more sensitive to noise.Installation is the process of mounting the transducers on the machine, and connecting them to the monitors and instrumentation. This includes temporarily connecting the instrumentation to permanently mounted transducers or a permanently wired monitor system.An improper installation, whether permanent or temporary, can cause many serious noise problems. Don’t try to save time by casually throwing together a vibration system. The time saved is often spent many times over trying to extract important machinery information from noisy data.Fortunately, most installation problems can be eliminated by knowing a few basic rules, and by doing a careful and methodical job. The old adage, “an ounce of prevention is worth a pound of cure”is true when installing a vibration measurement system.Bad ground connections or ground loops often result from a poor installation. One characteristic of noise due to poor installation is the presence of a 50 or 60 Hertz signal component. The noise frequency (either 50 or 60 Hertz) is the same as the frequency of the ac power source.A transducer generates a signal that is relative to the signal common seen by the transducer. An instrument measures the signal relative to the signal common seen by the instrument. If the signal common is different at the transducer and at the instrument, the measured signal will be different from the generated signal. In other words, the signal will be noisy. To avoid this noise, connections between signal common and earth must occur at earth ground points of equal voltage potential. This is easily done by connecting signal common and earth ground together at a single point. The single point is usually at the monitor rack, or at the barrier earth ground bus bar for intrinsically safe systems.The diagrams on the following two pages show the wiring for a Proximitor sensor with or without barriers. The diagrams are provided for reference only.Reference wiring diagram without barriers© 2008 General Electric Company. All rights reserved.This diagram shows how to connect a proximity transducer system without barriers. For this installation, the earth ground is at the 3500 Power Input Module.For this connection keep the following items in mind:•terminate shields at the contact marked “SHLD” and be sure that shields are insulated.•the 3300 Proximitor system has build in case isolation. For other displacement sensors be sure that the transducer system is isolated from earth ground.•to minimize group loop noise problems, a single point earth ground (GRD) to system common (COM) connection is recommended. This connection is made at the 3500 Power Input Module36© 2008 General Electric Company. All rights reserved.This diagram shows how to connect a proximity transducer system with barriers. For this installation, the earth ground is at the barrier rail.For this connection keep the following items in mind:•terminate shields at the contact marked “SHLD” and be sure that shields are insulated.•the 3300 Proximitor system has build in case isolation. For other displacement sensors be sure that the transducer system is isolated from earth ground.•barriers are mounted to a barrier rail which is the potential equalization bus between system ground and earth ground. To minimize group loop noise problems, a single point earth ground (GRD) to system common (COM) connection is required at the barrier rail. The total earth loop impedance must not exceed 1 Ω.•disconnect the single point earth ground connection on the 3500 Power Input Module. This connection is an internal switch on the 3500 Power Input Module as shown on the following page.Controlling where the 3500 System is grounded© 2008 General Electric Company. All rights reserved.The Power Input Modules come with a switch that lets you control where the system is grounded. If two Power Supplies are installed then both switches need to be set to the same position.A CLOSED switch (slid to the left)grounds the system through the GND terminal on the Terminal Strip connector. If the system is grounded at another location, such as when internal/external barriers are used, you need to be sure the switch is OPENED (slid to the right).Depending on model, this switch could be located directly above or below the input connector.Connecting a diagnostic instrument such as an oscilloscope, DVF-3, or ADRE 408 to a properly installed monitor rack, can create a ground loop problem. If a signal common and earth ground are connected inside the instrument, another earth ground point will exist.Some instruments allow the connection between signal common and earth ground to be broken, while others do not. The terms “floating”and “isolated”ground describe a signal common that is not connected to earth ground. Battery powered instruments always have an isolated signal common.To ensure that connecting an instrument to the monitor does not create an additional earth ground, isolate the instrument before connecting it by using a method like the ones shown on this page.If no voltage difference exists between the monitor rack earth ground and the instrument earth ground, no problem is likely. A voltage difference between the earth grounds is likely if different power circuits are used. The voltage difference will cause current to flow between the two earth grounds, thus generating ground loop noise.For some connections, an earth ground loop is more difficult to avoid. For instance, consider the signals from two widely separated monitor racks, or two monitor racks powered from different power circuits. Connecting an instrument will generate a ground loop even if signal common is isolated from earth ground.The severity of this problem depends on the amount of voltage difference that exists between the two racks. Again, if no voltage difference exists, no problem exists.Be careful when connecting a computer to an instrument already connected to a monitoring system. Computers are usually not isolated. Connecting a computer might introduce another earth ground into the system. Isolating the instrument from earth ground will not break the ground loop between the monitor rack and the computer. To break this ground loop, use an isolated short-haul modem or opto-isolator in the communication link.Finally, also pay special attention to any other equipment connected to the power circuits. Electric motors, for example, can put a large, short duration demand on a power circuit. This will cause a momentary voltage difference between the earth ground for that circuit and the earth grounds of the other circuits. The result is momentary ground loop noise in the system.Runout is any change in the transducer signal that is not caused by shaft motion. The two types of runout for proximity transducers are mechanical runout and electrical runout.We will discuss both types of runout on the next few pages.Mechanical runout is a noise component in an output signal cause by geometric imperfections. Mechanical runout occurs when the probe tip to shaft centerline distance is constant but the probe tip to shaft surface distance changes. Sources of mechanical runout include:out-of-round shaftscratchesdentsrust corrosionother physical surface defectsUsually measurable with a dial indicator and often visible.Electrical runout is a noise component in an output signal caused by any nonuniform electrical properties of the observed target such as electrical conductivity, magnetic permeability, rust, plating, or local magnetic fields.The preferred method of eliminating noise is to prevent the noise from occurring in the first place. Once noise exists in a signal, it can be difficult and risky to eliminate, even under the best of circumstances. Under the worst circumstances, it is impossible.In the next few pages, we talk about the common methods for removing noise –filters, slow roll compensation, and runout compensation.。
恒力电子产品说明书

FLUSH-MOUNT VERSION R1D type• 1 operation threshold• External toroidal transformer• Adjustable tripping I D n and delay time.Page 16-2Page 16-3FLUSH-MOUNT VERSION R2D type• 2 operation thresholds• External toroidal transformer • Configurable fail safe operation• Adjustable tripping I D n and delay time.R3D type• 2 operation thresholds• External toroidal transformer • Configurable fail safe operation • Flag indicator• Adjustable tripping I D n and delay time.MODULAR VERSION RM1 type• 1 operation threshold• External toroidal transformer • Fixed tripping I D n and delay time.RM type• 1 operation threshold• External toroidal transformer• Adjustable tripping I D n and delay time.Page 16-2MODULAR VERSION RMT type• 1 operation threshold• Incorporated toroidal transformer• Adjustable tripping I D n and delay time.Page 16-2TOROIDAL CURRENT TRANSFORMERS RT type• Solid core• 35mm to 210mm diameter.RTA type • Split core• 110mm and 210mm diameter.Page 16-3EXTERNAL MULTIPLIER RX10 type• 10-fold multiplier.Page 16-3Page 16-3FLUSH-MOUNT VERSION R4D type• 2 operation thresholds• External toroidal transformer • Configurable fail safe operation • Fault current measurement • Digital display • Flag indicator• Shunt tripping circuit• Adjustable tripping I D n and delay time.COMPACT INTERNAL PANEL VERSION RC type• 1 operation threshold• Incorporated toroidal transformer• Adjustable tripping I D n and delay time.Page 16-2E ARTH LEAKAGE RELAYS16Modular, flush and internal panel mount version, with or without flag indicator, configurable prealarm indication and fail safe operation Versions with automatic toroid connection controlChoice of supply voltage ranges Adjustable fault current I D nAdjustment and choice of tripping range for both fault current and delay time.S EC .-P AGEEarth leakage relaysWith 1 operation threshold ................................................................................................................................................ 16 -2With 2 operation thresholds ............................................................................................................................................... 16 -3Toroidal current transformers ............................................................................................................................................ 16 -3External multiplier ............................................................................................................................................................. 16 -3Dimensions ................................................................................................................. 16 -4Wiring diagrams ........................................................................................................... 16 -5Technical characteristics ................................................................................................. 16 -6C I R C U I T P R O T E C T I O NA N DI S O L A T I O NEarth leakage relaysRM1...31 RM...31 RC60...31 RC110...Earth leakage relays31 RT...31 RT...R2D...R3D...R4D...Earth leakage relaysDimensions [mm (in)]RELAYSTOROIDAL TRANSFORMERS AND MULTIPLIER16-416-5Earth leakage relaysWiring diagrams16RELAYSType Us Us TCS Wiring Wiring R4D 4824VAC/DC 1-2 17-18 48VAC/DC 1-3 17-19 110-125VAC 1-2 17-18 R4D 415 220-240VAC 2-3 17-18 380-415VAC 1-3 17-19GRDLine LoadGRDLine LoadGRDLine LoadGRDLine LoadGRDLine N L1L2L3GRDLine R1DR3DRM - RM1RCR4DR2DRMT∂The coil connection can vary depending on the connected type of device (contactor, breaker with shunt trip release or breaker with undervoltage trip release).∂The coil connection can vary depending on the connected type of device (contactor, breaker with shunt trip release or breaker with undervoltage trip release).∂The coil connection can vary depending on the connected type of device (contactor, breaker with shunt trip release or breaker with undervoltage trip release).∂The coil connection can vary depending on the connected type of device (contactor, breaker with shunt trip release or breaker with undervoltage trip release).Earth leakage relaysTechnical characteristicsTYPE R1D∂ R2D∂ R3D∂R4D∂∏DESCRIPTIONFlush mount with Flush mount with transparent Flush mount with transparent Flush mount with display and cover, transparent cover, cover,2 operating thresholds cover,2 operating thresholds 2 operating thresholds - constant 1 operating threshold constant toroid-relay circuit control constant toroid-relay circuit control toroid-relay circuit controlCONTROL CIRCUITToroidal transformer External(see types givenon page 16-3)AdjustmentsTripping set-point (I D n) 0.025-0.25A (x0.1) 0.03-0,3A (x0.1)0.25-2.5A (x1) 0.3-3A (x1)2.5-25A (x10) 3-30A (x10)25-250A (external multiplier) 30-300A (external multiplier)Prealarm set-point –– 70% I D n (fixed) 70% I D n (fixed) 70% I D n (fixed)Tripping delay time (t) 0.02-0.5s (tx1) 0.03-0,5s (tx1)0.2-5s (tx10) 0.3-5s (tx10)Selection of multiplier for I D n and t By dip switchesResetting Configurable automatic Automatic by remote contact closing or rear jumper connectionor manual by Manual by button on front or remote contact closingbutton on front∑Shunt circuit control –– –– –– YesAUXILIARY SUPPLYAuxiliary voltage Us 24-48VAC/DC(0.85 - 1.1 Us limit) 110-125VAC/DC 110-125/220-240/380-415VAC220-240/380-415VACRated frequency 50/60HzPower consumption (maximum) 5.5VA 4.5VA 4.5VA 5.5VARELAY OUTPUTSState Normally de-energised Configurable normally Configurable normally Configurable normallyde-energised or de-energised or de-energised orenergised energised energisedContact arrangement 1 changeover SPDT (trip) 2 changeover SPDT each (configurable: 2 trip or 1 trip and 1 alarm)Rated contact capacity IEC Ith 5A - 250VACElectrical life 3 x 105cyclesMechanical life 50 x 106 cyclesType of terminals Fixed Removable, plug-inTightening torque maximum 0.5Nm (4.5lbin)Conductor section min-max 0.2-2.5mm2(24-12AWG)AMBIENT CONDITIONSOperating temperature -10...+60°CStorage temperature -20...+80°CRelative humidity ≤90%HOUSINGMaterial Self-extinguishing polycarbonate∂Type A, sensitive to residual sinusoidal AC and pulsating DC currents.∑Remote resetting by removing power for more than 1 second.∏ Digital display of fault current measurement and tripping value memory.16-6Earth leakage relaysTechnical characteristicsRM1...∂RM...∂RMT...∂RC...∂Modular with transparent cover,Modular with transparent cover,Modular with transparent cover,Compact,1 operating threshold 1 operating threshold 1 operating threshold 1 operating thresholdExternal External Incorporated Ø28mm/1.1”Incorporated (see types given on page 16-3) (see types given on page 16-3)35-60-80-110mm/1.38-2.36-3.15-4.33”standard diameter0.3A or 0.5A only0.025-0.25A (x0.1)0.025-0.25A (x0.1)0.025-0.25A (x0.1)0.25-2.5A (x1)0.25-2.5A (x1)0.25-2.5A (x1)2.5-25A (x10) 2.5-25A (x10) 2.5-25A (x10)25-250A (external multiplier)––––––––0.02s or 0.5s only0.02-0.5s (tx1)0.02-0.5s (tx1)0.02-0.5s (tx1)0.2-5s (tx10)0.2-5s (tx10)0.2-5s (tx10)By dip switchesConfigurable A: Automatic orM: Manual by button on front––24-48VAC/DC110-125VAC/DC220-240/380-415VAC50/60Hz3VANormally de-energised Normally de-energised Configurable normally Normally de-energisedde-energised orenergised1 changeover SPDT (trip) 1 changeover SPDT (trip)2 changeover SPDT each (both trip) 1 changeover SPDT (trip)5A - 250VAC3x105cycles50x106cyclesFixed0.5Nm (4.5lbin)0.2-2.5mm2(24-12AWG)-10...+60°C-20...+80°C≤90%Self-extinguishing polycarbonate∂ Type A, sensitive to residual sinusoidal AC and pulsating DC currents.16-7。
转座因子介绍

宿主 DNA
过量的 OUT-RNA 与其配对,抑制 IN-RNA 的转录
甲基化阻止转录酶和 DNA 结合
甲基化阻止转录酶合成 图 23- 46 几种抑制 Tn10 专座的机制,主要是通过控专座酶的合成来调节
主要类型转座子
类型
细菌插入序 列(IS)
结构特征
TIRs;转座酶和或拆 分酶编码基因 IS组份;抗药基因 TIRs;蛋白质编码 基因(有内含子)
表 复合转座子的结构和功能
转座因 子 Tn903 Tn9 Tn10 长 度 (bp) 3100 2500 9300 遗传标 记 KanR CamR TetR 末端组 件 IS903 IS 1 IS 10R IS 10L Tn5 5700 KanR IS 50R IS 50L 反向 1 bp的改变 反向 有2.5%的 差异 方向 反向 正向 二组件的关 系 相同 推测相同 组件的功能 二者皆有功 能 预计有功能 有功能 无功能 有功能 无功能
① 如IS1因子不论以什么方向插入都会降低基因的表达,
②而IS2因子以同一方向插入到染色体中,则会减少基因的表 达,但以相反方向整合,则会增加基因表达。 ③不同转座元件的转座频率不同。一般为10-3-10-4 次/世代。 ④恢复频率则很低(通过精确切除IS元件而产生),为10-6-10-10/ 代。比插入频率率低 10 -3 倍。
• 3.复合转座子在两个末端有IS序列 • 4.首先,在靶位点处产生一个交错切口,切 出转座子。接着,转座子与靶位点连接。 最后,填补插入位点两侧的单链区。 • 5.转座子转座时能够导致宿主序列的缺失、 重复或插入。另外,转座子通过宿主重组 系统导致基因组重排。
2 复合转座子(composite
transposon)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OUTPUT (-Vdc)
16 14 12 10 8 -16 VDC Supply
6
4 2 0 0 10 20 30
40
50
60
70
80
90
100 110 120 130 140
PROBE GAP (mils)
27 of 40
© 2009-2010 General Electric Company. All rights reserved.
10
20
30
40
50
60 70
80 90 100 110 120 130 140
PROBE GAP (mils)
26 of 40
© 2009-2010 General Electric Company. All rights reserved.
不正确的电源电压
测量误差源-传感器系统
24 22 20 18 -24 VDC Supply
探头侧隙影响
测量误差源-传感器系统
问题:当导体材料与探头顶端两侧过于接近时,就会造成 电磁场的衰减。
31 of 40
© 2009-2010 General Electric Company. All rights reserved.
探头互扰
测量误差源-传感器系统
问题:两个探头安装位置过于接近时,他们之间电磁场就会相 互作用从而产生错误的振动信号。
加上 4 米延伸电缆
需要
• 必须要和前置器中的标定向匹配。 5 米 前置器
每个前置器是根据特定的系统长度进行标定的。
11 of 40
© 2009-2010 General Electric Company. All rights reserved.
三层同轴电缆
系统组件
外屏蔽 (非电气连接) 绝缘层 (绝缘)
22 of 40
© 2009-2010 General Electric Company. All rights reserved.
增量差异
性能校验
3300 XL 8mm 9 米系统的可接 受变化带
图例:传感器响应的增量差异是以相对于特定传感器比例因子的百 分比变化量来表示的。
23 of 40
© 2009-2010 General Electric Company. All rights reserved.
解调器的工作原理
设计与工作原理 • 解调电路可以从射频信号中提 取出调制信号。
0V
时变(AC)值就是振动信号 均值(DC)就是间隙电压
0V
DC间隙电压 AC 振动信号 (峰-峰)
9 of 40
© 2009-2010 General Electric Company. All rights reserved.
Proximity Transducer Operation
振动基础
第9章 (GE-Public)
© 2009-2010 General Electric Company. All rights reserved.
学习目标
• 描述以下基本概念以及涡流传感器系统的工作原理
– – – – 设计与工作原理 系统组件 操作校验 测量误差源
探头电缆 延伸电缆
图例:安装在探头和延长电缆连接处的 保护层
14 of 40
© 2009-2010 General Electric Company. All rights reserved.
性能校验
1米长的8毫米探头的直流电阻在7.5安左右。 4米长的延长电缆的直流电阻则约为1.2安。
注:查阅传感器说明书从而获得各个特定组 件的直流电阻值。
© 2009-2010 General Electric Company. All rights reserved.
TK-3 涡流传感器系统检测套件
性能校验
集成了主轴千分尺的原始套件
独立的主轴千分尺的更新套件
检测套件中的主轴千分尺主要用来验证传感器系统的振动测量性能。
17 of 40
© 2009-2010 General Electric Company. All rights reserved.
内屏蔽 (连接公共端)
中心导体 (信号)
外保护层
12 of 40
© 2009-2010 General Electric Company. All rights reserved.
ClickLoc* 电缆连接器
系统组件 • 微型螺纹同轴连接器 • 耐腐蚀的镀金层 • 在连接电缆时,不需要其他特殊工 具。 • 为防止松动,用手指拧紧闭锁结构。
基于计算机的演示(CBT)
性能校验
数据采集CBT包括进度自定的 多媒体演示,介绍基本的振动 传感器的操作方法。
24 of 40
© 2009-2010 General Electric Company. All rights reserved.
测量误差源
传感器系统 •不匹配的系统组件 •不正确的电源电压 •不匹配的被测物体材料 传感器安装 •安装支架共振 •不合理的被测物体尺寸 •探头侧隙影响 •探头互扰涡流设计与操作
围绕线圈 周围的电磁场 射频信号
目标导体
涡流探头
交变磁场在此金属表面产生小感应 电流
5 of 40
© 2009-2010 General Electric Company. All rights reserved.
大间隙
设计与原理
间隙
+15V
• 当间隙很大时,被测物体只 吸收了很小一部分能量。 • 射频振荡信号幅值就很大
延伸电缆 探头电缆
延伸电缆
探头电缆
13 of 40
© 2009-2010 General Electric Company. All rights reserved.
连接器保护套
系统组件 • 模制的连接器保护套可以提供非常 良好的密封性,以防止连接器受到 环境污染。 • 良好的绝缘性可以为连接器提供电 气隔离。 • 我们可以定制已经安装好连接器保 护套的探头和延伸电缆,或者在现 场进行安装。
探头和探头电缆
延长电缆
校验探头和电缆电阻
15 of 40
© 2009-2010 General Electric Company. All rights reserved.
比例因子验证
性能校验
万用表
10,000 欧姆 精密电阻器 电源供应
探头
被测体
前置器
验证传感器的标定值
TK-3 主轴千分尺
16 of 40
不匹配的被测物体材料
测量误差源-传感器系统
24 22 20 18
OUTPUT (-Vdc)
16 14 12 10 8 6 4 2 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140
4140 STEEL TUNGSTEN ALUMINUM COPPER
2 of 40
© 2009-2010 General Electric Company. All rights reserved.
设计与工作原理
• 振荡器产生射频信号
• 信号在探头顶端的线圈周围产生磁 场。
• 磁场与可导的被测物体表面相互作 用。 • 当探头与被测物体之间的距离发生 变化时,信号幅值也随之发生变化。
涡流探头
射频(RF) 电磁场
转子
3 of 40
© 2009-2010 General Electric Company. All rights reserved.
调谐电路
设计与原理
振荡器 解调器
探头和延长电缆
前置器
此传感器系统就是一个典型的R-L-C振荡回路。
4 of 40
© 2009-2010 General Electric Company. All rights reserved.
25 of 40
© 2009-2010 General Electric Company. All rights reserved.
不匹配的组件
测量误差源-传感器系统
24
22
20 18 SHORT Cable
OUTPUT (-Vdc)
16 14 12 10 8 6 4 2 0 0 LONG Cable Correct Length
PROBE GAP (mils)
28 of 40
© 2009-2010 General Electric Company. All rights reserved.
安装支架共振
测量误差源-传感器系统
问题:支架的振动将会导致探头随之移动,从而对被测物 体振动测量造成影响
29 of 40
© 2009-2010 General Electric Company. All rights reserved.
主轴千分尺
性能校验
主轴千分尺和8mm探头
图例:50 密尔 (1.27 毫米) 间隙
主轴千分尺可以很方便的用来准确测量探头顶端与被测物 体之间的物理间隙。
18 of 40
© 2009-2010 General Electric Company. All rights reserved.
API 670 验收测试
不合理的被测物体尺寸
测量误差源-传感器系统
被测物体的尺寸相对于探头来说较合理
被测物体的尺寸相对于探头来说太小了
问题:探头顶端附近的电磁场无法与被测物体表面完全接 触。
30 of 40
© 2009-2010 General Electric Company. All rights reserved.