西门子PLC程序 脉冲位置控制
西门子S7-200系列PLC顺序控制指令

西门子S7-200系列PLC顺序控制指令挨次掌握指令是plc生产厂家为用户供应的可使功能图编程简洁化和规范化的指令。
表1 挨次掌握指令的形式及功能STL LAD功能操作对象LSCR bit挨次状态开头S(位)SCRT bit挨次状态转移S(位)SCRE挨次状态结束无CSCRE条件挨次状态结束无从上表中可以看出,挨次掌握指令的操作对象为顺控继电器S,也把S称为状态器,每一个S的位都表示功能图中的一种状态。
S的范围为:即S0.0~S31.7。
从LSCR指令开头到SCRE指令结束的全部指令组成一个挨次掌握继电器(SCR)段。
LSCR指令标记一个SCR段的开头,当该段的状态器置位时,允许该SCR段工作。
SCR段必需用SCRE指令结束。
当SCRT 指令的输入端有效时,一方面置位下一个SCR段的状态器S,以便使下一个SCR段工作;另一方面又同时使该段的状态器复位,使该段停止工作。
由此可以总结出每一个SCR程序段一般有三种功能:(1)驱动处理:即在该段状态器有效时,处理相应的工作;有时也可能不做任何工作;(2)指定转移条件和目标:即满意什么条件后状态转移到何处;(3)转移源自动复位功能:状态发生转移后,置位下一个状态的同时,自动复位原状态。
1、挨次掌握指令的应用液压动力滑台在自动机床中被广泛采纳,这里以液压动力滑台掌握为例来说明挨次功能图设计方法以及挨次掌握指令的使用方法。
液压动力滑台在实际工作时的运动过程一般是:快进——工进——快退。
其运动过程由快进、工进、快退三个电磁阀掌握,掌握系统PLC各I/O功能及地址安排如表2所示。
机床液压滑台掌握系统如图1所示。
表2 液压动力滑台掌握系统PLC I/O地址安排功能名称动作器件I/O地址说明启动按钮SB1I0.0启动滑台原点位置SQ1I0.1滑台在原点位置工进起点SQ2I0.2滑台运动到工进起点位置工进终点SQ3I0.3滑台运动到工进终点位置快进YV1Q0.0滑台快进工进YV1、YV2Q0.0、Q0.1滑台工进快退YV3Q0.2滑台快退初始化脉冲SM0.1将初始状态S0.1置位。
PLC的脉冲输出控制步进电机的实用方法
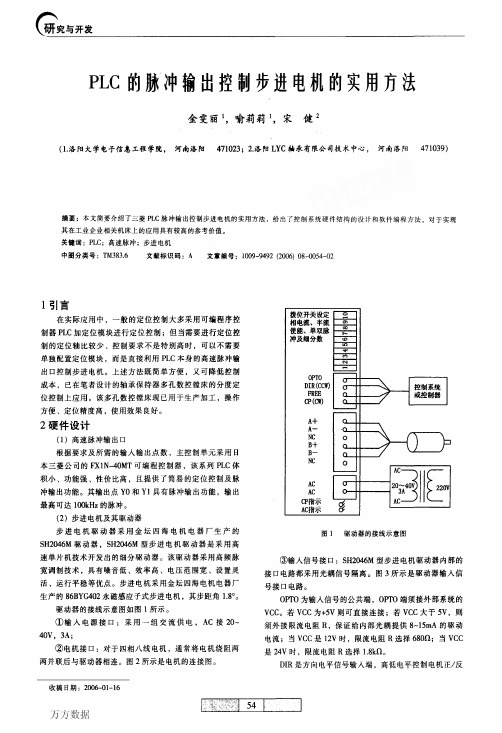
断电复位方可有效。 步进电机的型号是86BYG402,其相电流选4A,拨位
开关1 2 3 4设定值为1111。细分数根据实际应用的精度 要求来选取。
(3)PLC与步进电机驱动器的硬件连接 可编程序控制器PLC与步进电机驱动器的连接如图4
2.期刊论文 胡佳丽.闫宝瑞.张安震.李庆春.何亚东.信春玲 S7-200 PLC在伺服电机位置控制中的应用 -自动化仪
表2009,30(12)
为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,探讨了基于西门子S7-200系列PLC和Copley系列伺服系统的位置控制方法.通过 介绍系统软硬件构成及其特点,详细论述了PLC系统通过高速脉冲输出、EM253位置控制模块以及自由口通信这三种方式控制伺服电机,以实现绝对运动、 相对运动等;同时对它们进行了一系列的比较.实验证明,三种控制方式各有其不同的应用场合,对类似的工业控制具有一定的借鉴参考意义.
1234 1000 100l 1010 1011 1100 1101 11lO 1111
相电流 2.25A 2.50A 2.75A 3.OOA 3.25A 3.50A 3.75A 4.00A
表2 细分设定【位7 8 9 10)
7 8 9 10 0000 0001 oolO 0011 0100 0101 0110 0111
在图4中将可编程序控制器的脉冲输出端yo的公共端como和输出点y10的公共端com4皆与可编程序控表1相电流设定i位12341234相电流1234相电流0000025a1000225a0001050a100l250a0010075a1010275a00111ooa10113ooa0100125a1100325a0101150a1101350a0110175a11lo375a01112ooa1111400a表2细分设定位7891078910细分数789lo细分数0000110001800012100l20oolo410lo32001151011400100611005001018110l01101011101280111161111256制器的24v地即com相连步进电机驱动器的输入信号公共端与可编程序控制器plc的24v电源相连plc的脉冲输出端yo外接18k的限流电阻连接至步进脉冲输入信号cpplc的输出点y10用于控制步进电机的旋转方wc咖024vsh204硼步进电机驱动器fxlhomtc删0ptp18置yot一c卜一cp18置y10dir图4plc与步进电机驱动器的连接向外接18k的限流电阻连接至方向电平输入端dir
西门子PLC中开关量、模拟量、脉冲量的介绍
西门子PLC中开关量、模拟量、脉冲量的介绍其实西门子PLC中无非就是三大量:开关量,模拟量,脉冲量。
只要搞清楚三者之间的关系,你就能熟练的掌握PLC了。
1.开关量也称逻辑量,指仅有两个取值,0或1、ON或OFF。
它是最常用的控制,对它进行控制是PLC的优势,也是PLC最基本的应用。
关量控制的目的是,根据开关量的当前输入组合与历史的输入顺序,使PLC产生相应的开关量输出,以使系统能按一定的顺序工作。
所以,有时也称其为顺序控制。
2.模拟量是指一些连续变化的物理量,如电压、电流、压力、速度、流量等。
PLC是由继电控制引入微处理技术后发展而来的,可方便及可靠地用于开关量控制。
由于模拟量可转换成数字量,数字量只是多位的开关量,故经转换后的模拟量,PLC也完全可以可靠的进行处理控制。
由于连续的生产过程常有模拟量,所以模拟量控制有时也称过程控制。
模拟量多是非电量,而PLC只能处理数字量、电量。
所有要实现它们之间的转换要有传感器,把模拟量转换成数电量。
如果这一电量不是标准的,还要经过变送器,把非标准的电量变成标准的电信号,如4—20mA、1—5V、0—10V等等。
同时还要有模拟量输入单元(A/D),把这些标准的电信号变换成数字信号;模拟量输出单元(D/A),以把PLC处理后的数字量变换成模拟量——标准的电信号。
所以标准电信号、数字量之间的转换就要用到各种运算。
这就需要搞清楚模拟量单元的分辨率以及标准的电信号。
例如:PLC模拟单元的分辨率是1/32767,对应的标准电量是0—10V,所要检测的是温度值0—100℃。
那么0—32767对应0—100℃的温度值。
然后计算出1℃所对应的数字量是327.67。
如果想把温度值精确到0.1℃,把327.67/10即可。
模拟量控制包括:反馈控制、前馈控制、比例控制、模糊控制等。
这些都是PLC内部数字量的计算过程。
3.脉冲量是其取值总是不断的在0(低电平)和1(高电平)之间交替变化的数字量。
s7200脉冲设置

S7-200系列PLC编程器的使用示例Siemens编程器S7-200系列用在中小型设备上的自动系统的控制单元,适用于各行各业,各种场合中的检测,监测及控制。
在这里,和大家一起来讨论S7-200几个使用方面的情况。
1.步进,伺服脉冲定位控制。
在设备的控制系统中,有关运动控制是很重要的,下面我们来看一看西门子S7-200系列PLC怎样来实现这个功能。
首先,确定使用哪个端口来发脉冲,如采用Q0.0发脉冲,则它的控制字为SMB67,脉冲同期为SMW68,脉冲个数存放在SMD72中,下面是控制字节的说明:Q0.0 Q0.1 控制字节说明SM67.0 SM77.0 PTO/PWM更新周期值0=不更新,1=更新周期值SM67.1 SM77.1 PWM更新脉冲宽度值0=不更新,1=脉冲宽度值SM67.2 SM77.2 PTO更新脉冲数0=不更新,1=更新脉冲数SM67.3 SM77.3 PTO/PWM时间基准选择0=1微秒值,1=1毫秒值SM67.4 SM77.4 PWM更新方法0=异步更新,1=同步更新SM67.5 SM77.5 PTO操作0=单段操作,1=多段操作SM67.6 SM77.6 PTO/PWM模式选择0=选择PTO,1=选择PWMSM67.7 SM77.7 PTO/PWM允许0=禁止PTO/PWM,1=允许这样根据以上表格,我们得出Q0.0控制字:SMB67为:10000101,采用PTO输出,微妙级周期,发脉冲的周期(也就是频率)与脉冲个数都要重新输入。
10000101转化为16进制为85,有了控制字以后,我们来写这一段程序:根据上面这段程序,我们知道了控制字的使用,同时也知道步进电机的脉冲周期与冲个数的存放位置(对Q0.0来说是SMW68与SMD72)。
当然,VW100与VD102内的数据不同的话,步进电机的转速和转动圈数就不一样。
还有一点需要说明得是:M0.0导通---PLC捕捉到上升沿发动脉冲输出后,想停止的话,只须改变端口脉冲的控制字,再启动PLS即可,程序如下:2.高速计数功能。
第5章 西门子S7-200系列PLC功能指令(脉冲输出)
3) PTO的,允许脉 冲串排队。PTO输出多段脉冲的方式有两种: ●单段PTO:定义一个脉冲串,输出一个脉冲 串 (特性参数通过特殊寄存器分别定义) 。 ●多段PTO:集中定义多个脉冲串,按顺序输
出多个脉冲串(特性参数通过包络表集中定义) 。
▲单段PTO 实现的方法 用指定的特殊标志寄存器定义脉冲串特性 参数(每次定义一个脉冲串)。一个脉冲串输 出完成后,产生中断。在中断服务程序中再为 下一个脉冲串更新参数,输出下一个脉冲串。 ◎优点: 各脉冲段可以采用不同的时间基准。 ◎缺点:单段PTO输出多段高速脉冲串时,编程 复杂,且参数设置不当会造成脉冲串之间的不平 滑转换。每个脉冲串输出期间周期值不能改变.
2)特殊寄存器
每个 PTO/PWM 都有一组配套参数: ● 1个 8位的控制字节 ● 1个 8位的状态字节 ● 1个 16位的周期值 ● 1个 16位的脉宽值 ● 1个 32位的脉冲数量 对于多段 PTO,还有 ● 1个 8位的段字节 ● 1个 16位包络表起始地址
这些参数存放在系统指定的特殊标志寄存器中
高速脉冲输出指令控制 PLC 从指定的输出 端输出高速脉冲信号。 1. 高速脉冲输出的几个概念 1) 高速脉冲输出的形式 ● 高速脉冲串输出 PTO :
( Pulse Train Output )
输出指定数量,占空比为50% 的方波脉冲串。
● 宽度可调脉冲输出 PWM :
( Pulse Width Modulation )
名称及功能描述
SMW70
SMW80
PWM的脉宽值,字型,范围0~65535,16位无符号 数
SMD72
SMD82
PTO的脉冲数,双字型, 范围:1~4294967295,32位无符号数
S7—200PLC的PTO在步进电机位置控制中的应用
S7—200PLC的PTO在步进电机位置控制中的应用研究了高速脉冲串输出在步进电机位置控制中的应用,包括应用PLS指令、MAP指令库及位置控制指令向导等方法。
给出了系统构成,说明了各种方法的应用。
对步进电机的位置控制有实际意义。
标签:S7-200;步进电机;位置控制;PTO;MAP;PLS引言作为自动控制系统中的执行元件,步进电机的应用十分广泛,主要原因是步进电机有很多优点,其中它的控制方法比较简单。
步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲个数。
可以通过控制脉冲频率来控制电机转动的速度和加速度,进行调速;可以通过控制脉冲个数来控制角位移量,进行准确定位。
控制步进电机的方法较多,目前流行的是采用PLC通过步进电机驱动器来控制步进电机。
为了配合步进电机的控制,许多PLC都内置脉冲输出功能,并设置了相应的控制指令,可以很好地对步进电机进行控制。
为了实现对步进电机的开环定位控制,可以通过PLC控制输出脉冲来实现。
本文应用SIEMENS公司S7-200PLC来控制步进电机。
SIEMENS公司S7-200PLC 主要提供了以下几种方式的开环定位控制:脉冲串输出(PTO)、EM253位控模块、自由口通信等。
文章主要探讨PTO这种方式。
1 步进电机位置控制系统1.1 硬件系统步进电机位置控制系统由PLC、步进电机驱动器、步进电机和丝杠组成。
系统选择的PLC为SIEMENS公司CPU226DC/DC/DC型。
選用的步进电机是42H2P4812A4的两相混合式步进电机,该型号的步进电机步矩角为1.8°,相电流1.2A,静转矩4.5kg·cm,额定转速400rmp。
选用的驱动器型号为2MA320,该驱动器的供电电压DC12-36V ,驱动电流0.3-2.0A,细分精度1-128细分,可驱动任何2.0A相电流以下两相、四相混合式步进电机。
由于上述步进电机的相电流为1.2A,驱动器的SW1-SW3分别设置为:ON、OFF、OFF,即输出峰值电流为1.5A,SW5-SW7分别设置为ON、ON、ON,即细分设定为200步/圈。
西门子S7-200系列PLC在步进电机定位控制中的应用
西门子S7-200系列PLC在步进电机定位控制中的应用
西门子S7-200系列PLC可以在步进电机定位控制中扮演关键
角色。
步进电机是一种常用于精确位置控制的电机,可以在不使用传感器的情况下实现准确的位置控制。
PLC可以通过控
制步进电机的驱动器,实现对步进电机的定位控制。
PLC可以接收外部输入信号,用于触发步进电机的运动。
这
些信号可以包括启动信号、停止信号、以及指令信号等。
PLC
可以根据不同的输入信号状态,控制步进电机的运动方向和速度。
PLC可以与步进电机控制器进行通信,以发送指令和接收状
态反馈。
PLC通过发送指令,控制步进电机按照指定的步进
角度或者位置移动。
同时,PLC可以接收步进电机控制器的
状态反馈信息,包括是否到达目标位置、是否超出限位等,以便进行适当的控制策略。
PLC可以与外部设备(例如传感器、触发器等)进行联动,
实现更加复杂的步进电机定位控制。
通过接收外部设备的信号,PLC可以根据具体的应用需求,进行逻辑判断和控制操作,
以实现更加灵活和精确的步进电机定位控制。
西门子S7-200系列PLC在步进电机定位控制中具有广泛的应用。
它可以根据各种输入信号状态,控制步进电机的运动方向和速度,实现精确的位置控制。
同时,PLC还可以与步进电
机控制器和外部设备进行通信和联动,实现更加复杂的控制策略。
西门子PLC读取系统时间及实现整点脉冲
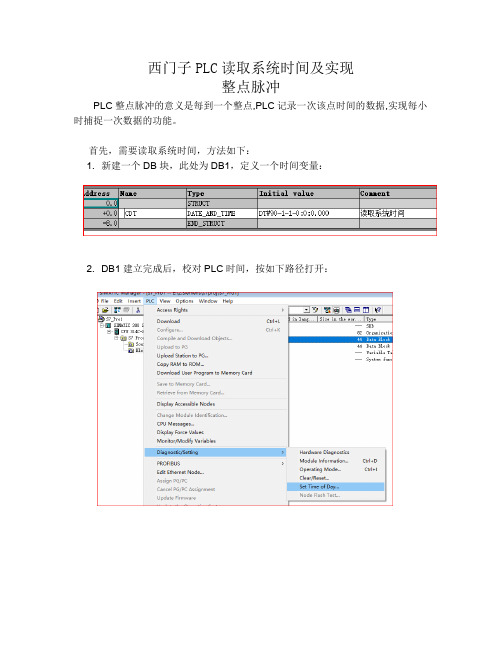
西门子PLC读取系统时间及实现整点脉冲PLC整点脉冲的意义是每到一个整点,PLC记录一次该点时间的数据,实现每小时捕捉一次数据的功能。
首先,需要读取系统时间,方法如下:1.新建一个DB块,此处为DB1,定义一个时间变量:2.DB1建立完成后,校对PLC时间,按如下路径打开:3.选择Set Time of Day选项会谈出对话框,根据PG/PC time调整Moduletime,勾选Take from PG/PC,使PLC系统时间与计算机时间一致。
4.在程序中调用SFC1读取系统时间, SFC1是系统默认的读取时间程序,MW0是读取系统时间的点,SFC1(READ_CLK)模块前不需要增加任何其他的条件,否则可能会导致读取时间不准确或有误差现象:5. 新建一个变量表查看当前时间:最后2个字节DB1.DBB6和DB1.DBB7表示百分之一秒和毫秒,然后我们在电脑时间,由于抓取时间有误差,电脑是20:27:18,读取时间是 正确的。
既然已经实现读取系统时间,那么接下来就是实现整点脉冲:1. 从上面我们可以看到20:26 是16进制的2026,也就是10进制的8230,因此我们需要把一整天24小时每个整点对应的10进制计算出来,如下:00:00 – 0 01:00 - 256 0 2:00 - 512 03:00 - 768 04:00 - 1024 05:00 - 1280 06:00 – 1536 07:00 - 1792 08:00 – 2048 09:00 – 2304 10:00 – 4096 11:00 - 4352 12:00 – 4608 13:00 – 4864 14:00 – 5120 15:00 - 5376 16:00 – 5632 17:00 – 5888 18:00 – 6144 19:00 - 6400 20:00 – 8192 21:00 – 8448 22:00 – 8704 23:00 - 896019代表19年 11代表11月 14代表14日 20代表20点 26代表26分 51代表51秒2.每当读取到DB1.DBW3为整点是,输出一个脉冲,程序如下:中间省略….。
西门子S7-200 PLC高速脉冲输出向导使用方法

西门子S7-200 PLC高速脉冲输出向导使用方法西门子S7-200 PLC高速脉冲输出向导使用方法一、引言本文档旨在向用户介绍如何在西门子S7-200 PLC中使用高速脉冲输出。
高速脉冲输出在许多应用中都有重要作用,如步进电机驱动、频率控制和位置控制等。
通过本文档,用户将了解到在S7-200 PLC中配置和使用高速脉冲输出的详细步骤和注意事项。
二、配置PLC硬件在开始使用高速脉冲输出之前,需要先配置PLC硬件。
请按照以下步骤进行配置:1:确保S7-200 PLC已经正确安装并与相应的设备连接。
2:配置PLC的I/O模块,使其支持高速脉冲输出。
具体的配置步骤可以参考PLC的用户手册。
三、配置高速脉冲输出模块在进行高速脉冲输出之前,需要配置相应的输出模块。
请按照以下步骤进行配置:1:打开S7-200 PLC的编程软件(如Step 7-Micro/WIN)并连接到PLC。
2:打开相应的程序文件,并选择菜单中的“硬件配置”选项。
3:在硬件配置界面中,选择相应的输出模块,并进行配置。
可以根据实际需要设置输出的频率和脉冲宽度等参数。
四、编写PLC程序在配置完输出模块后,需要编写相应的PLC程序,以实现高速脉冲输出。
请按照以下步骤进行编写:1:在编程软件中打开相应的程序文件。
2:在程序文件中创建一个新的网络,并将其命名为“高速脉冲输出”。
3:在网络中使用相应的指令来控制高速脉冲输出。
例如,可以使用P_REAL_TO_INT指令将实数型数据转换为整数型数据,并使用MOV指令将转换后的值写入输出模块的地址。
五、调试和测试在完成程序编写后,需要进行调试和测试以确保高速脉冲输出正常工作。
请按照以下步骤进行调试和测试:1:将编写好的程序到PLC中。
2:使用PLC编程软件中的在线监控功能来观察高速脉冲输出的状态和数值。
3:连接相应的设备(如步进电机或频率控制器),并观察其运行情况。
附录:本文档涉及附件:- 西门子S7-200 PLC用户手册- S7-200 PLC编程软件Step 7-Micro/WIN安装包法律名词及注释:- PLC:可编程逻辑控制器,是一种用于工业自动化控制的电子设备。
如何改变西门子PLC的脉冲宽度?

如果您用16#D2或16#DA预载SMB67,您可以使用一个将脉冲宽度改变为脉冲输出(Q0.0)的子例行程序。
建立对该子例行程序的调用后,使用以下步骤建立改变脉冲宽度的控制逻辑:1. 在SMW70中载入新脉冲宽度的字尺寸数值。
2. 执行PLS指令,使西门子PLC的S7-200为PTO/PWM生成器编程。
3. 退出西门子PLC的子例行程序。
改变PTO循环时间-单段操作对于单段PTO操作,您可以使用中断例行程序或子例行程序改变循环时间。
欲使用单段PTO操作更改西门子PLC的中断例行程序或子例行程序械 PTO循环时间,请遵循下列步骤:·设置控制字节(启用PTO/PWM功能、选择PTO操作、选择时基、设置更新循环时间数值),方法是在SMB67:16#81(用于微秒)或16#89(用于毫秒)中载入下列一个数值。
·在SMW68中,载入新循环时间的一个字尺寸数值。
·执行PLS指令,使S7-200为PTO/PWM生成器编程。
更新脉冲计数波形输出开始之前,CPU必须完成所有进行中的PTO。
·退出中断例行程序或子例行程序。
改变PTO脉冲计数-单段操作对于单段PTO操作,您可以使用中断例行程序或子例行程序改变脉冲计数。
欲使用单段PTO操作在中断例行程序或子例行程序中PTO脉冲计数,请遵循下列步骤:1. 设置控制字节(启用PTO/PWM功能、选择PTO操作、选择时基、设置更新循环时间数值),方法是在SMB67:16#84(用于微秒)或16#8C(用于毫秒)中载入以下两个数值之一。
2. 在SMD72中,载入新脉冲计数的一个双字尺寸数值。
3. 执行PLS指令(以便S7-200为PTO/PWM生成器编程)。
开始用更新脉冲计数生成波形之前,S7-200完成所有进行中的PTO。
4. 退出中断例行程序或子例行程序。
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有 10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
西门子S7-200实现高速脉冲输出

与其他品牌的PLC相比,西门子S7-200的价格可 能较高,对于一些预算有限的项目来说可能不太 合适。改进方向可以是降低成本或提供更多性价 比高的产品选项。
复杂编程
对于不熟悉西门子编程环境的用户来说,实现高 速脉冲输出可能需要较复杂的编程过程。改进方 向可以是提供更直观、易用的编程工具或教程。
提升了系统性能
丰富了控制功能
西门子S7-200 PLC在高速脉冲输出的基础上 ,还可以实现多种复杂的控制功能,如位置 控制、速度控制等,进一步拓展了其应用领 域。
高速脉冲输出功能的实现,提高了控 制系统的响应速度和精度,使得整个 系统的性能得到了显著提升。
未来发展趋势预测
更高速度、更高精度的脉冲输出
纺织机械
通过S7-200输出的高速脉冲信号,控制纺织机械 的各执行机构,实现纺织品的精确编织和加工。
西门子S7-200实现高速脉冲
05
输出优势与不足
优势分析
高速性能
西门子S7-200 PLC具有高速脉冲输 出功能,可以实现快速、准确的脉冲 信号输出,满足高速运动控制的需求。
高精度控制
通过精确的定时器和计数器,S7200可以实现高精度的脉冲输出控制,
性能测试与验证
测试脉冲输出功能
使用示波器或逻辑分析仪等测试 工具,对S7-200 PLC输出的高 速脉冲进行测试,验证脉冲的频 率、数量、宽度等参数是否符合
要求。
验证控制精度
通过与实际设备或模拟负载的连 接,验证高速脉冲输出的控制精 度和稳定性,确保满足实际应用
需求。
优化性能参数
根据测试结果,对控制程序或硬 件配置进行调整和优化,进一步
02 连接脉冲输出模块
将选定的脉冲输出模块正确连接到S7-200 PLC的 相应插槽上,并确保模块与PLC之间的通讯连接 正常。
西门子S7-200plc脉冲控制步进电机接线及实例程序介绍(实物)
西门子S7-200plc脉冲控制步进电机接线及实例程序介绍(实物)江西省南昌市2015-2016学年度第一学期期末试卷(江西师大附中使用)高三理科数学分析试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。
试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。
1.回归教材,注重基础试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。
2.适当设置题目难度与区分度选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。
3.布局合理,考查全面,着重数学方法和数学思想的考察在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。
包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。
这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。
二、亮点试题分析1.【试卷原题】11.已知A,B,C是单位圆上互不相同的三点,且满足AB?AC,则ABAC?的最小值为()1 41B.? 23C.? 4D.?1 A.?【考查方向】本题主要考查了平面向量的线性运算及向量的数量积等知识,是向量与三角的典型综合题。
解法较多,属于较难题,得分率较低。
【易错点】1.不能正确用OA,OB,OC表示其它向量。
2.找不出OB与OA的夹角和OB与OC的夹角的倍数关系。
西门子1200PLC实用定位控制程序案例

西门⼦1200PLC实⽤定位控制程序案例引⾔本⽂是⼀篇综合性⽐较强的⽂章,从PLC输⼊输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusTCP通信协议及上位机编程实现最终控制,涉及知识⾯⽐较⼴,能够让我们很好地将所学知识结合起来。
开发平台采⽤西门⼦TIA Portal V16编程软件编写运动控制程序,实现PLC(S7-1200系列:CPU1214C DC/DC/DC )对步进电机的控制,再通过编写ModbusTCP程序,将控制地址进⾏映射,从⽽⽅便上位机(VS 2019开发)与PLC进⾏通信,最终实现步进电机的运动⽅向、速度及距离的灵活控制。
涉及硬件:开关电源、S7-1200PLC、步进驱动器、步进电机、单轴模组、限位开关涉及软件:TIA Portal V16、VS2019、ModbusPoll(⽤于测试通信)硬件接线PLC编程上位机开发思路为了便于操作,需要配⼀个HMI⼈机界⾯来进⾏使⽤。
这个的HMI形式是⽐较多样化的,如触摸屏、组态软件等,但是这⾥,我们采⽤⽬前⽐较流⾏的⽅式——C#开发上位机,来供⽤户使⽤。
C#开发上位机相对于传统的组态软件,各⾃都有⾃⼰的优缺点,主要体现在如下三个⽅⾯:1. 功能限制:组态软件对于⼀些特定的需求或者逻辑,会有⼀定的局限性,使⽤上也受到软件本⾝的约束;C#开发上位机完全⾃主开发,⼏乎不存在功能上的限制,并且扩展⽅便。
2. 技术要求:组态软件最⼤的优势在于⽅便,因为它本⾝都集成了⼀些通⽤协议和元件,只需要按照使⽤说明进⾏组态配置即可;C#开发需要完全⾃⼰搭建框架和实现底层代码,对开发者的技术要求会更⾼⼀些。
3. 价格成本:组态软件需要按套、按点位收费,意味着每个项⽬⽆形中都有⼀个基础成本;C#开发上位机⾃主开发,不需要⼆次授权费⽤,并且开发⼀套之后,可以快速应⽤到其他项⽬中。
采⽤C#上位机开发,⾸先需要考虑的是通信问题。
西门⼦S7-1200⽀持很多种不同的通信协议,包括S7、ModbusTCP、TCP/IP、UDP、OPC等,从开发成本上来说,我们优先考虑S7和ModbusTCP,对于S7和ModbusTCP通信协议,⽐较⼀下两者的优缺点:1. S7协议为西门⼦内部协议,协议本⾝不公开,需要调⽤或者⾃⼰开发通信库,使⽤S7通信协议需要勾选CPU中的允许来⾃远程对象的PUT/GET通信访问。
西门子plc脉冲指令详解

西门⼦plc脉冲指令详解(1)脉冲输出(PLS)指令被⽤于控制在⾼速输⼊(Q0.0和Q0.1)中提供的“脉冲串输出”(PTO)和“脉宽调制”(PWM)功能。
PTO提供⽅波(50%占空⽐)输出,配备周期和脉冲数⽤户控制功能。
PWM提供连续性变量占空⽐输出,配备周期和脉宽⽤户控制功能。
脉冲指令如图所⽰。
(2) S7-200有两台PTO/PWM发⽣器,建⽴⾼速脉冲串或脉宽调节信号信号波形。
⼀台发⽣器指定给数字输出点Q0.0,另⼀台发⽣器指定给数字输出点Q0.1。
⼀个指定的特殊内存(SM)位置为每台发⽣器存储以下数据:⼀个控制字节(8位值)、⼀个脉冲计数值(⼀个不带符号的32位值)和⼀个周期值及脉宽值(⼀个不带符号的16位值)。
(3) PTO/PWM发⽣器和过程映像寄存器共⽤Q0.0和Q0.1。
PTO或PWM功能在Q0.0或Q0.1位置现⽤时,PTO/PWM发⽣器控制输出,并禁⽌输出点的正常使⽤。
输出信号波形不受过程映像寄存器状态、点强迫数值、执⾏⽴即输出指令的影响。
PTO/PWM发⽣器⾮现⽤时,输出控制转交给过程映像寄存器。
(4)过程映像寄存器决定输出信号波形的初始和最终状态,使信号波形在⾼位或低位开始和结束。
脉冲串(PTO)功能提供⽅波(50%占空⽐)输出或指定的脉冲数和指定的周期。
脉宽调制(PWM)功能提供带变量占空⽐的固定周期输出。
(5)每台PTO/PWM发⽣器有⼀个控制字节(8位)、⼀个周期值和脉宽值(不带符号的16位值)及⼀个脉冲计数值(不带符号的32位值),这些值全部存储在特殊内存( SM)区域的指定位置。
⼀旦设置这些特殊内存位的位置,选择所需的操作后,执⾏脉冲输出指令( PLS)即启动操作。
该指令使S7-200读取SM位置,并为PTO/PWM发⽣器编程。
(6)通过修改SM区域中(包括控制字节)要求的位置,可以更改PTO或PWM的信号波形特征,然后执⾏PLS指令。
可以在任意时间向控制字节(SM67.7或SM77.7)的PTO/PWM启⽤位写⼊零,禁⽤PTO或PWM信号波形的⽣成,然后执⾏PLS指令。
基于西门子PLC的两种位置控制方式分析

84
Sheji yu Fenxi◆设计与分析
电子式多功能电能表存在的问题分析及防范措施
何毓函 孙艳玲 翟晓卉
(国网山东省电力公司电力科学研究院,山东 济南 250003)
摘 要:电子式多功能电能表由于比机械电能表具有高精度、多功能、低故障、宽频带等优点,得到了越来越广泛的运用,因此如何 保证电能表正常运行是首先需要考虑的问题。 检定和管理对于电子式多功能电能表来说十分重要,现就当前该类电能表使用中存在的 问题进行了分析,并据此提出了相应的防范措施。
设计与分析◆Sheji yu Fenxi
基于西门子PLC的两种位置控制方式分析
王丽平1 焦山川2 (1.郑州铁路源自业技术学院,河南 郑州 450000;2.中铁工程装备集团有限公司,河南 郑州 450016)
摘 要:西门子PLC具有高速脉冲输出和高速计数器等功能,现以抓取机械手的位置控制为例,介绍基于西门子PLC的两种位置控 制方式。
器,可以通过PLC的Q0.0或Q0.1输出端产生高速脉冲,用来驱 动诸如伺服(步进)电动机一类负载,实现速度和位置控制[2]。 高速脉冲的输出有两种方式,即脉冲串输出(PTO)和脉宽调制 输出(PWM)。 一般选用PTO方式,可将Q0.0设定为PTO功能, 输出一串占空比为50%的脉冲,通过控制脉冲周期和数量来控 制电机的转速和转角,从而对机械手进行位置控制。 使用 STEP7-Micro/WIN位置控制向导, 可以帮助用户在很短的时 间内全部完成PTO组态。 在使用位置控制向导之前,首先要清 楚驱动电机的运动包络,PTO支持相对位置和单一速度的连续 转动两种模式。 运动包络组态完成后,向导会生成子程序,主 要包括子程序PTO0_CTRL、PTO0_RUN等。 PTO0_CTRL子 程序用于启用和初始化伺服电机的PTO输出,PTO0_RUN子 程序用来命令PLC执行存储在组态/包络表中的指定包络运动 操作。 调用位控向导生成的子程序,把每一个运动包络的完成 信号当作下一个运动包络的启动信号,进行程序编写,即可实 现机械手的准确定位控制。
史上最全的西门子脉冲方式汇总

史上最全的西门子脉冲方式汇总基本指令部分:脉冲输出指令(PLS)用于在高速输出(Q0.0和Q0.1)上控制脉冲串输出(PTO)和脉宽调制(PWM)功能。
1、 PWM波PWM产生一个占空比变化周期固定的脉冲输出。
可以以微秒或者毫秒为单位指定其周期和脉冲宽度:周期:10 µs到65,535 µs 或2ms到65,535 ms脉宽时间: 0 µs到65,535µs 或0ms到65,535 ms注:脉宽≥周期值占空比是100%:连续接通输出。
脉宽=0 占空比是0%:连续关闭输出。
周期振动。
由于这个原因,建议采用PWM同步更新。
选择一个适合于所有周期时间的时间基准。
1.2特点:周期和脉宽都是以时间为单位特别是脉宽不是固定的 0-255 或者0-5122、脉冲串操作(PTO)TO按照给定的脉冲个数和周期输出一串方波(占空比50%)。
PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲波形)。
可以指定脉冲数和周期(以微秒或毫秒为增加量):脉冲数目: 1到4,294,967,295周期:10 µs到65,535 µs或2ms到65,535 ms。
周期寄存器。
一旦启动了起始PTO段,就必须按照第二个信号波形的要求改变特殊寄存器,并再次执行PLS指令。
第二个脉冲串的属性在管道中一直保持到第一个脉冲串发送完成。
在管道中一次只能存储一段脉冲串的属性。
当第一个脉冲串发送完成时,接着输出第二个信号波形,此时管道可以用于下一个新的脉冲串。
重复这个过程可以再次设定下一个脉冲串的特性。
除去以下两种情况之外,脉冲串之间可以作到平滑转换:时间基准发生了变化或者在利用PLS指令捕捉到新脉冲之前,启动的脉冲串已经完成。
特点:可以实现输出多个单端脉冲中间无需停止2.2 PTO脉冲串的多段管道在多段管道模式,CPU自动从V存储器区的包络表中读出每个脉冲串的特性。
在该模式下,仅使用特殊存储器区的控制字节和状态字节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
块:主程序
作者:创建时间:2015.12.03 10:41:21 修改时间:
2015.12.24 21:34:23
符号变量类型数据类型注释 TEMP TEMP TEMP
TEMP
程序注释网络标题
网络 1网络注释
PTO0_RUN EN
P
START
Done Profile Error Abort
C_Profi~C_Step C_Pos SM0.0I0.2位控制块当前~:VB502开启时位模块蛜:M5.0当模块完成本硚:M2.2错误参数:VB505VB508VB512VD5004
符号地址注释
错误参数
VB505当模块完成本程序此数开M2.2开启时位模块停止当前包M5.0位控制块当前执行包络VB502
网络 2
PTO0_CTRL
EN
P
I_STOP
P
D_STOP
Done Error C_Pos SM0.0I0.3I0.4M2.0VB500VD5002
网络 3
PTO0_MAN
EN
RUN
Error Speed C_Pos SM0.0I0.527000VB510VD5006
块:INT_0
作者:
创建时间:2015.12.03 10:41:21
修改时间:2015.12.24 21:34:23
符号变量类型数据类型注释
TEMP
TEMP
TEMP
TEMP
中断程序注释
网络标题
网络 1
网络注释
创建时间:2015.12.03 16:53:45
修改时间:2015.12.03 16:53:45
符号变量类型数据类型注释
EN IN BOOL
L0.0I_STOP IN BOOL立即停止当前运动
L0.1D_STOP IN BOOL减速停止当前运动。
IN
IN_OUT
L0.2Done OUT BOOL当 PTO 操作完成命令时接通
LB1Error OUT BYTE0 = 无错误。
其他错误请参见 POU 注释LD2C_Pos OUT DINT正在执行的段数
OUT
TEMP
此指令由 PTO/PWM 向导生成,用于输出点 Q0.0。
创建时间:2015.12.03 16:53:45
修改时间:2015.12.03 16:53:45
符号变量类型数据类型注释
EN IN BOOL
L0.0START IN BOOL如果 PTO 不忙向其发送命令
LB1Profile IN BYTE需要运行的运动包络号
L2.0Abort IN BOOL取消 RUN (运行) 命令
IN
IN_OUT
L2.1Done OUT BOOL当 PTO 操作完成命令时接通
LB3Error OUT BYTE0 = 无错误。
其他错误请参见 POU 注释LB4C_Profile OUT BYTE当前包络
LB5C_Step OUT BYTE包络中的当前步骤
LD6C_Pos OUT DINT当前位置
OUT
TEMP
此指令由 PTO/PWM 向导生成,用于输出点 Q0.0。
PTOx_RUN (运行运动包络) 指令用于命令线性 PTO 操作执行在向导配置中指定的运动包络。
以下是为此项操作定义的运动包络:
----------------------------------------------------------
包络 "格式0_0" 定义一个 1 步相对运动。
包络 "格式0_1_0" 定义一个 1 步相对运动。
包络 "格式0_2_0" 定义一个 1 步相对运动。
包络 "格式0_3_0" 定义一个 1 步相对运动。
包络 "格式0_4" 定义一个速度为每秒 20000 个脉冲的单速运动
创建时间:2015.12.03 16:53:45
修改时间:2015.12.03 16:53:45
符号变量类型数据类型注释
EN IN BOOL
L0.0RUN IN BOOL RUN/STOP (运行/停止) 加速至目标速度和目标位置LD1Speed IN DINT目标速度
IN
IN_OUT
LB5Error OUT BYTE0 = 无错误。
其他错误请参见 POU 注释
LD6C_Pos OUT DINT当前位置
OUT
TEMP
此指令由 PTO/PWM 向导生成,用于输出点 Q0.0。
PTOx_MAN (手动模式) 指令用于以手动模式控制线性 PTO。
在
手动模式中,可用不同的速度操作 PTO。
使能 PTOx_MAN 指令时,只允许使用 PTOx_CTRL 指令。