PLC讲义11
PLC精品讲座ppt课件

浮点数(实数)
ANSI/IEEE7541985标准
(正数)+1.175495E-38至 +3.402823E+38
(负数)-1.175495E-38至3.402823E+38
ppt精选
19
SMB0的各个位功能描述
SMB0的 各个位
功能描述
SM0.0
常闭触点,在程序运行时一直 保持闭合状态
SM0.1
ppt精选
24
此课件下载可自行编辑修改,供参考! 感谢您的支持,我们努力做得更好!
ppt精选
25
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!感谢你的观看!
该位在程序运行的第一个扫描 周期闭合,常用于调用初始化 子程序
SM0.2
若永久保持的数据丢失,则该 位在程序运行的第一个扫描周 期闭合。可用于存储器错误标 志位
SM0.3
开机后进入RUN方式,该位将 闭合一个扫描周期。可用于启 动操作前为设备提供预热时间
SM0.4 SM0.5
该位为一个一分钟时钟脉冲, 30s闭合,30s断开
ppt精选
20
2.S7-200 PLC的寻址方式
CPU存储器的寻址方式有直接寻址和间接寻 址两种形式。在此仅简单介绍一下直接寻址方 式。
直接指出元件名称的寻址方式称作直接寻址。 直接寻址又有位寻址、特殊器件寻址和字节寻 址。
(1)位寻址格式 位寻址格式为:Ax.y,使用时必须指定元件 名称、字节地址和位号。
输入 1
COM
ppt精选
内 内 部 电 路
7
西门子S7-200输出连接图
plc培训讲义

几个重要概念
后备 • 后备电池为内置的装载存储器和外部装载存储器、 工作存储器的数据部分及代码部分 • 提供后备电源。 冷启动(Cold Restart) • 冷启动时,不管您是否将参数设置为可保持的或不 可保持的,所有数据(包括过程映像数据、存储器 标准、定时器、计数器和数据块)均被复位为程序 开始存储的值。 • 程序将从新开始运行(启动OB 或OB1)。
S7-300模拟量输入/输出模块
模拟量模块包括: SM331:模拟量输入模块 SM332:模拟量输出模块 SM334:模拟量输入输出模块 其特性见教材。 模拟量输入模块主要是用于将模拟过程信号转换为 数字形式。 模拟量输出模块主要是用于将数字输出值转换为模 拟信号。
电源模块
PS 307电源模块将120/230伏交流电压转 换为24V直流电压,为S7-300/400、传感器 和执行器供电。输出电流有2A、5A或10A 3 种。电源模块安装在DIN导轨上的插槽1。
第二节、S7-400系列PLC硬件组成
P CC S
C P U M
I M
I M
I M
I M
I M
I
1
2
3
4
5
6
I EU
I/O CP, FM M
I
I
I/O
M
I/O
M
… … …
I EU I/O M CP, FM
I/O M
I I/O M
I
图2-15 S7-400的多机架连接
S7-400的特点
• (1)运行速度高,S7 416执行一条二进制指令只要 0.08s。 • (2)存储器容量大,例如CPU 417-4的RAM可以扩展到 16MB,装载存储器(FEPROM或RAM)可以扩展到 64MB。 • (3)I/O扩展功能强,可以扩展21个机架,S7 417-4最多 可以扩展262144个数字量I/O点和16384个模拟量I/O。 • (4)有极强的通信能力,集成的MPI能建立最多32个站 的简单网络。大多数CPU集成有PROFIBUS-DP主站接口, 用来建立高速的分布式系统, 通信速率最高12M bit/s。 • (5)集成的HMI服务,只需要为HMI服务定义源和目的地 址,自动传送信息。
PLC讲义
可程式控制授課班級:二技自一甲、二進自一甲授課教師:鄭淵明第一章可程式控制器概論1-1發展過程隨著機械和其它設備在工廠自動(Factory Automation) 領域中,多種整合快速變化的影響,設計省時、省力、自動化的控制是必然的趨勢。
在歐美國家早期的自動化機械,其控制部門,是由繼電器、按鈕開關、計時器、計數器及感測開關等所構成,以達到控制目的。
但是大約在1968年美國最大的汽車工廠,推出的汽車款式愈來愈多,在生產線上,為應付各種款式的控制,其控制器經常面臨需要修改的情況,而且計時器或計數器,也無法達到同步操作,於是要求依下列條件設計可程式控制器:1.體積小。
2.容易維修,可靠性高。
3.可重複使用。
4.容易設定或更變程式。
5.適用於工廠惡劣的環境。
6.價格低。
7.能與電腦連線操作。
1-2基本原理可程式控制器可稱為順序器(sequencer)或稱為順序控制器(Sequencer Controller)。
工業自動控制依其應用的特性,可分為兩種(1) 為數值控制(Numerical Control),俗稱NC控制,它是強調量測與定位的精準度,(2) 順序控制(Squence Control),俗稱SC控制,它強調的是階段、步進、程序過程等等。
NC控制講求的每一動作的尺寸或物理量的精準度。
而順序控制是講求先後順序的過程,其定位或物理量的測量是由外部裝置例如光電感測器,近接開關等來決定。
至於順序控制,大致亦可分成兩類型(1) 單純進行ON/OFF返覆動作的順序控制,(2) 依據某條件,作ON/OFF控制的條件控制。
1-3優點與應用可程式控制器的使用,改善了很多傳統繼電器的缺點,其設計更趨人性化,所以是值得去了解與使用的控制器它具有下列的特性與優點:1.利用微處機處理資料,運算與通信能力強。
2.可程式化的設計,修改程式容易。
3.體積小,適合各種環境。
4.抗雜訊。
5.模組化設計,擴充容易。
6.自我診斷功能強。
PLC原理及应用(讲义)
第一章. PLC 概论可编程序控制器(Programmable Controller)简称PC ,为了避免同个人计算机(Personal Computer ,简称PC )混淆,现在一般将可编程序控制器简称为PLC (Programmable Logic Controller )。
PLC 从诞生至今已有30多年,发展势头异常迅猛,已经成为当代工业自动化领域中的支柱产品之一。
特别是随着计算机技术和通信技术的发展,PLC 的应用领域逐步扩大,应用前景十分看好。
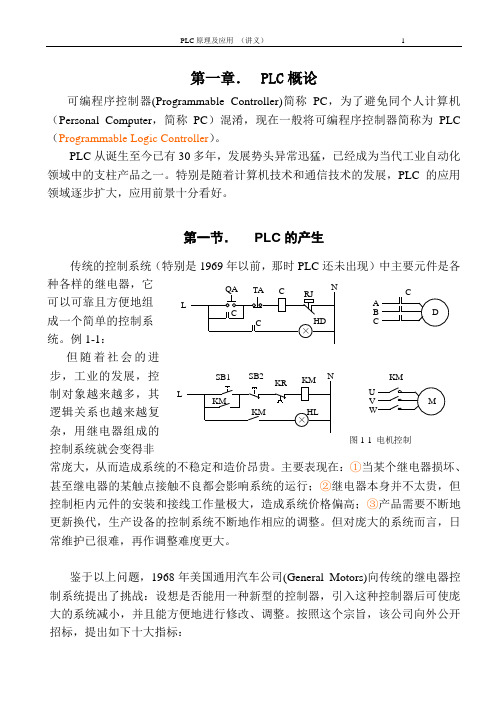
第一节. PLC 的产生传统的控制系统(特别是1969年以前,那时PLC 还未出现)中主要元件是各 种各样的继电器,它可以可靠且方便地组成一个简单的控制系统。
例1-1:但随着社会的进步,工业的发展,控制对象越来越多,其逻辑关系也越来越复杂,用继电器组成的控制系统就会变得非 常庞大,从而造成系统的不稳定和造价昂贵。
主要表现在:①当某个继电器损坏、甚至继电器的某触点接触不良都会影响系统的运行;②继电器本身并不太贵,但控制柜内元件的安装和接线工作量极大,造成系统价格偏高;③产品需要不断地更新换代,生产设备的控制系统不断地作相应的调整。
但对庞大的系统而言,日常维护已很难,再作调整难度更大。
鉴于以上问题,1968年美国通用汽车公司(General Motors)向传统的继电器控制系统提出了挑战:设想是否能用一种新型的控制器,引入这种控制器后可使庞大的系统减小,并且能方便地进行修改、调整。
按照这个宗旨,该公司向外公开招标,提出如下十大指标:LLKM 图1-1 电机控制①. 编程简单,可在现场改程序;②. 维护方便,最好是插件式;③. 可靠性高于继电器控制柜;④. 体积小于继电器控制柜;⑤. 成本低于继电器控制柜;⑥. 可将数据直接输入计算机;⑦. 输入可以是市电(AC110v);⑧. 控制程序容量≥4KB;⑨. 输出可驱动市电2A以下的负荷,能直接驱动电磁阀;⑩. 扩展时,原有的系统仅作少许更改。
plc详细讲解ppt课件精选全文
4 096字节 4 096字节 2 048字节 50小时 8入/6出
2个模块 4路30KHz 2路20KHz
2路20KHz
1 配时钟卡
1 RS-485
1 RS-485
有
256 (128入/128出)
0.22μs /指令
CPU224
120.5 x 80 x 62
8 192字节 12 288字节 8 192字节 100小时 14入/10出 7个模块 6路30KHz 4路20KHz 2路20KHz 2 内置
(2)字节(B)
MB[起始字节地址]
MB0表示位存储器区第0个字节,共8位,其中第0位是最 低位,第7位为最高位。
(3)字(W) MW[起始字节地址] 一个字含两个字节,这两个字节的地址必须连续,其中低位 字节是高8位,高位字节是低8位。如MW0中IB0是高8位, MB1是低8位
(4)双字(DW) MD[起始字节地址] 一个字含四个字节,这四个字节的地址必须连续,最低位字节 在一个双字中是最高8位。如MD0中IB0是最高8位,MB1是高 8位,MB2是低8位,MB3是最低8位
PLC
1L
~
输出端子
Q0.0
KM
~
1L
公共端
输入部分
用户程序
输出部分
触点闭合 电动机转
SB1闭合
I0.0闭 合
I0.0 I0.0
SB2 I0.1 I0.1
Q
FU KM KH
SB1 I0.0 SB2 I0.1 ST I0.2
1M
M
3~
线圈通电
KM Q0.0
PLC
1L
~
KM通电
接点闭合
Q0.0
PLC基本知识PPT课件
可编程控制器是一种数字运算操作的电子 系统,专为在工业环境下应用而设计。它采用 一类可编程序的存储器,用于其内部存储程序、 执行逻辑运算、顺序控制、定时、计数和算术 操作等面向用户的指令,并通过数字式或模拟 式输入/输出,控制各种类型的机械或生产过程。
8
2.2 可编程控制器的特点、分类和技术指标
2.2.1 可编程控制器的特点 2.2.2 可编程控制器的分类 2.2.3 可编程控制器的技术指标
9
2.2.1 可编程控制器的特点
1. 性能稳定可靠,抗干扰能力强。 2. 模块化组合式结构,通用性好,使用灵活方便。 3. 编程简单,便于普及。 4. 可进行在线修改。 5. 网络通讯功能,便于实现分散式测控系统。 6. 与传统的控制方式比较,线路简单。 7. 体积小,重量轻,功耗低。
10
2.2.2 可编程控制器的分类
SB2
X1 PLC Y1
KM2
SB3 X2
COM
COM ~~
SB1:正 转 SB2:反 转 SB3:停 止 KM1:正
(b)内部寄存器
输入映象寄存器 X0 X1 X2
输出映象寄存器 Y0 Y1
. . SB3 SB1 KM2 KM1
. KM1 . . SB2
KM1 KM2
(c)
➢ 输入继电器供PLC接收外部输入信号,因此在梯形图中只出现输入 继电器的触点,而不出现输入继电器线圈。
PLC基础学习资料很实用PPT教案

立即寻址 例:MOVB 2#1011_0001,VB10; MOVW 1024,VW20; MOVD 16#3C4D5E67,VD200
直接寻址 例:AND Q5.5 ; ORB VB33,LB21 ; MOVW AC0,AQW2 ; MOVD AC1,VD200
间接寻址: 例:连续“字节”间接寻 建立指针 址
过7个,常闭触点不超过6个。
第20页/共89页
4.2 S7-200 PLC的基本 指令
基本逻辑指令
复杂逻辑指令
定时器和计数器指令
顺序控制继电器指令
移位寄存器指令
比较操作指令
第21页/共89页
基本逻辑指令
1.输入/输出(I/O)指令
STL指 LAD指令 功能 操作数 数据类型 令
bit 输入(常
执行用户程序
起
SB1
动
0.1
停
SB2 0.2
止
1M
M
DC 24V L+
1L AC 220V
输入映象寄存 器I0.1
KM
FR
I0.2
0.0
输出映象寄存 器Q0.
改写输出/输出刷新 0
第6页/共89页
I0.1
I0.2 Q0.
0
Q0. 0
PLC的主要特点:
P L C 的 技术 性能指 标:
1.高可靠性和强抗干扰 能力
CPU模块提供的本地I/O(具有固
定S7的-200I主/机O扩地展应址考虑)以不下因够素:用时,可以将
扩展模块连接到CPU的右侧来增加 允许主机所带扩展模块的数量
CPU222:2块;其他7块
数字量I/O映像区的大小
I/O点,形成I/O链。 模拟量I/O映像区的大小
PLC基础知识大全PPT值得收藏(2024)

29
THANKS
感谢观看
2024/1/26
30
2024/1/26
12
编程软件使用方法与技巧分享
选择合适的编程软件
根据PLC型号和编程需求选择合 适的编程软件。
掌握编程技巧
学习使用快捷键、自定义功能块 、复制粘贴等编程技巧,提高编 程效率。
2024/1/26
01 02 03 04
学习软件基本操作
熟悉软件界面、工具栏、菜单等 基本操作。
调试程序
利用仿真功能进行程序调试,检 查程序逻辑和语法错误。
当遇到无法解决的问 题时,可以向同事、 专家或厂家寻求帮助 。
14
04
PLC通信网络与数据传输技术
Chapter
2024/1/26
15
通信协议类型及特点分析
现场总线协议
如Profibus、Modbus等 ,具有实时性、可靠性和 灵活性,适用于工业现场 设备间的通信。
2024/1/26
以太网协议
如TCP/IP、UDP等,传输 速度快、通信距离远,适 用于工厂自动化和信息化 的集成。
人工智能技术在PLC中应用前景展望
1 2
故障诊断与预测
利用人工智能技术,PLC可以实时监测设备运行 状态,进行故障诊断和预测,提高设备维护效率 。
优化控制策略
通过人工智能技术,PLC可以学习并优化控制策 略,提高工业自动化系统的运行效率和稳定性。
3
智能化人机交互
结合人工智能技术,PLC可以实现更加智能化的 人机交互,提高操作便捷性和用户体验。
机器人控制系统设计案例展示
南大傲拓PLC讲义

感谢您的观看
THANKS
性和稳定性。
南大傲拓PLC支持多种编程语 言,如梯形图、指令表、结 构化文本等,方便工程师快 速上手。同时,其模块化设 计使得维护变得简单快捷。
南大傲拓PLC支持多种通讯协 议,如Modbus、Profinet等, 能与各种设备进行无缝对接, 实现数据的快速传输和共享。
南大傲拓PLC提供了多种I/O 模块和功能模块,用户可以 根据实际需求灵活配置,满
总结词
实现生产线的自动化控制,提高生产 效率
详细描述
南大傲拓PLC在自动化生产线控制中 发挥着核心作用,通过对生产线上的 设备进行精确控制,实现了生产流程 的自动化,提高了生产效率。
案例二:电梯控制系统
总结词
保障电梯安全运行,提高乘客舒适度
详细描述
南大傲拓PLC在电梯控制系统中负责接收和响应各种信号,确保电梯的稳定运行。 同时,通过优化控制算法,提高了乘客的舒适度。
电源模块
南大傲拓PLC采用稳定的电源设计,为整个系统提供可靠的供电保障。
02
南大傲拓PLC编程基础
编程语言
指令表编程
使用类似于汇编语言的指令表进行编程, 通过编写指令序列来实现控制逻辑。
功能块图编程
使用功能块图进行编程,通过组合功 能块来实现控制逻辑,具有模块化和
可重用性。
梯形图编程
使用梯形图进行编程,通过绘制梯形 图来描述控制逻辑,易于理解和调试。
仿真软件
用于模拟PLC的运行环境和控制逻辑,方便用户进行程序调 试和测试。
数据类型与存储方式
输入输出数据类型
用于描述PLC的输入输出信号,如开关量、模拟 量等。
欧姆龙PLC讲义

3. 输入时间常数设定
CPM1A输入电路设置了一个滤波器。
滤波时间常数的大小可根据需要设置。
滤波时间常数可在系统设置区中设置。
干扰脉冲
输入信号
输入时
间常数
τ
τ
滤波后的信号
经过输入滤波后干扰脉冲将被滤掉
4. 高数计数器功能
CPM1A设置了一个高速计数器。
高速计数器可以对外部输入的高速脉冲进行计数。 使用高速计数器时,必须在系统设置区中进行设定。
BL5IN00K-A适L配00器4
上位机的功能: 工作状态跟踪监测、故障报警、 采集系统中的某些数据等。
上位机可以在线修改PLC的某些 设定值和当前值、改写PLC的用 户程序等。
R适S配-4器22 C主PM机1A
R适S配-4器22 C主PM机1A R适S配-4器22 C主PM机1A
2.NT Link通信
常用的应用指令
脉冲输出指令
数据传送和数据比较
中断控制指令
数据移位和数据转换
步进控制指令
数据运算
特殊指令
1. 指令的分类
基本指令 应用指令
2. 指令的格式
助记符(指令码)
助记符:表示指令的功能 指令码:是指令的代码
操作数1 操作数2 操作数3
操作数:提供指令执行的对象或数据
★ 关于操作数的讨论
操作数可以是通道号、继电器号或常数。 操作数的个数,取决于各种指令的需要。 操作数设为常数时,在数据前面要加#号。 操作数采用哪种进制,取决于指令的需要。
CPM1A-20EDT
PLC第11章
18
2018/6/3
可编程序控制器原理及应用
1Байду номын сангаас.3.3 PLC控制程序开发
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
图11-5 分类站的PLC控制程序流程图
19
2018/6/3
可编程序控制器原理及应用
11.3.3 PLC控制程序开发
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
第11章 PLC控制系统设计
可编程序控制器原理及应用
本章讲述的主要内容: 第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
11.1 PLC的系统设计
11.2 水塔的控制
11.3 分类站的控制 11.4 模式组灯的控制 11.5 运料小车的控制 11.6 供料站的控制
15
2018/6/3
可编程序控制器原理及应用
本章讲述的主要内容: 第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
11.1 PLC的系统设计
11.2 水塔的控制
11.3 分类站的控制 11.4 模式组灯的控制 11.5 运料小车的控制 11.6 供料站的控制
图11-11 运料小车的PLC控制程序流程图 31
2018/6/3
可编程序控制器原理及应用
11.5.3 PLC控制程序开发
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
32
2018/6/3
可编程序控制器原理及应用
11.5.3 PLC控制程序开发
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章
PLC应用技术讲义
ZC
M 3~
TA
ZA
ZC
FA
FC
FC
FC ZC ZC=TA·(ZA+ZC) ·FC ZC FC FC=TA·(FA+FC) ·ZC
ZA:正转按钮 FA:反转按钮 TA:停止按钮
ZC:正转接触器 FC:反转接触器
图1-1 继电器控制示例
3
第一节 PLC概述
• 继电器控制系统的优点:结构简单、使用方便、容易掌握; • 继电器控制系统的缺点:体积大、动作慢,动态响应差;功能少,难 以构成复杂控制系统;采用硬接线方式,通用性和灵活性差。 2)通用汽车公司对PLC的要求: • 体积小、价格低、可靠性高; • 使用维护方便、可现场编程; • 功能可扩充、修改,具有数据交换能力; • 能直接连接工业现场的输入输出设备。 3)1969年,美国DEC公司研制成功第一台PLC(PDP-14)。目前主流厂 商主要有:美国AB、德国SIEMENS、日本MITSUBISHI、OMRON等。
15
第一节 PLC概述
3 PLC程序的循环运行
PLC采用循环扫描的方法来执行用
户程序,其内部操作大致包含:
①系统初始化及内部管理
②启动监控和自诊断
③集中输入扫描 ④解释执行用户程序 ⑤处理通信请求 ⑥集中输出更新 ⑦自动返回至②循环执行
图1-6 PLC循环扫描周期示意图
注:PLC允许用户程序使用时钟中 断和外部中断。当中断事件发生时, CPU将以异步扫描的方式为申请中 断的用户提供及时的服务。
2)管理中断,监视错误、故障; 3)内存分配,协调各程序模块的调用及数据交换; 4)循环解释执行用户程序; 5)集中I/O处理; 6)管理通信端口和编程端口。 运行方式: 1)编程方式(PRG) 编辑、传送用户程序;
信捷PLC课程讲义

试验一PLC基本指令的基本了解及联系1、试验目的掌握基本的逻辑控制指令、定时器、计数器的使用,学会使用PLC的编程软件实现简单的逻辑控制。
2、试验说明采用步进电机或者异步电机试验台用Y0~Y7模拟外部8个指示灯,通过一个启动开关X0,让8个指示灯实现走马灯的控制,X1作为停止按钮。
(附加内容:X2作为暂停和继续按钮)走马灯的动作顺序:Y0~Y7先后点亮,相邻两个灯之间的点亮间隔时间为3s,全部点亮后间隔3s,然后在一次从后往前熄灭,相邻时间间隔仍然为3s,全部熄灭之后再从第一步开始动作。
附加:加上X2暂停和继续之后,触发一次X2,停止动作,所有状态保持,再触发一下,就紧接着上一次的状态继续往下运行。
3、PLC端子定义X0:启动X1:停止X2:继续\暂停Y0:指示灯1Y1:指示灯2Y2:指示灯3Y3:指示灯4Y4:指示灯5Y5:指示灯6Y6:指示灯7Y7:指示灯84、授课内容:a、PLC的发展及行业背景b、PLC的工作原理c、PLC编程软件的安装、卸载及使用d、基本指令的编辑e、程序在线调试、监控的演示5、实验步骤:1.输入输出接线,检查线路,线路图见接线图。
2.编写调试程序。
3.启动并运行程序观察实验现象。
4.调试结束按要求完成实验报告。
试验二触摸屏的基本了解以及基本功能的使用1、试验目的了解工业触摸屏的使用场合,学会使用触摸屏编辑软件,知道触摸屏与PLC以及其他相关设备连接的工作流程2、试验说明采用异步电机试验台在触摸屏上编辑一个数码管的显示画面,然后在在触摸屏中再设置一个数字输入窗口,输入的数字是几,屏上的数码管显示内容就是几3、授课内容a、触摸屏的使用场合以及行业背景b、触摸屏编辑软件的安装、卸载及使用c、触摸屏程序的编辑、调试d、触摸屏与PLC联机工作演示4、实验步骤:1、输入输出接线,检查线路,线路图见接线图。
2、编写调试程序。
3、启动并运行程序观察实验现象。
4、调试结束按要求完成实验报告。
PLC教程PPTch11
Date: 2019/11/24 19
Page:
三、逻辑设计法
以布尔逻辑代数为理论基础,以逻辑变量“0”或 “1”作为研究对象,以“与”、“或”、“非”三种基 本逻辑运算为分析依据,对电气控制线路进行逻辑运算, 把触点的“通、断”状态用逻辑变量“0”或“1”来表示。
设计举例 “与”逻辑关系 “或”逻辑关系 “与、或、非”逻辑关系
Date: 2019/11/24 20
Page:
“与”
L(Y1)= X0 ·X1·X2·M1
“或”
L(Y2)= X0 +X1+M2 +Y2
“与、或、非”
L(Y3)=( X0 +X1)·X2·Y2 +M10
X0 X1 X2 M1 Y1
X0 Y2
X1
M2
Y2
X0
X2 Y2
Y3
X1
M10
Date: 2019/11/24 21
Y1
X1
S21
Y2
X2
S22
Y3
X3
S23
Y4
X4
M8002 S0 X0 S20
X1 S21
X2 S22
X3 S23
X4
SET S0 SET S20
Y1 SET S21 Y2 SET S22 Y3 SET S22
Y4 S0
RET
END
LD X0
LD M8002 SET S0 SEL S0 LD X0 SET S20
Date: 2019/11/24 12
Page:
六、电源电压的选择
我国优先选择220V的交流电源电压,特殊情况可选 择24V直流电源供电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013-9-23
26
2013-9-23
27
三、四则逻辑运算指令(118) (新P113)
加法指令FNC20/ADD:将指定的源元件中的二进制数相
加,结果送到指定的目标元件中。
使用说明: (D10)+(D12) →(D14)。
②加法指令结果影响标志位。3个特殊辅助继电器作为标 志位:M8020 零标志,M8021借位标志,M8022进位标志继 电器。
2013-9-23
11
4、文件寄存器 这类寄存器用于存储大量数据,如在现场采集的数 据,计算中大量的中间数据等。占用用户存储器的空间。 通过参数设定后,可以扩展为(D1000-D7999)。
2013-9-23
12
5、内部指针(P、I)
1)、分支指令用指针P
与相应的功能指令配合,完成程序的跳转、结 束、调用子程序等功能。这些相应的功能指令是: • FNC00(CJ)条件跳转指令;
(置位/复位指令SET/RST,是对单个元件进行的。)
使用说明:
①两个目标操作数指定的元件必须是同类,且位数相
同。例如:同为16位计数器。 ②如果第一个目标操作数的元件号大于第二个,则只 有第一个指定的元件复位。
2013-9-23
32
2013-9-23
33
六、高速处理指令(144) (新P138)
2、脉冲输出指令FNC57/PLSY(151) (新P144)
当执行条件满足时,在指定的输出端按指定的频率
输出指定个数的脉冲。
使用说明:
①设定的频率必须在规定的范围内,且占空比为50%,
如FX2N系列指定频率范围为2-20kHz。(K100为100HZ)
②指定的脉冲输出个数在规定的范围内,如16位指令时, 为1-32767个。 ③输出端为Y0或Y1,其它输出口不能作为脉冲输出端。 ④设定的脉冲发送结束后,执行结束标志位M8029置1。
2013-9-23 24
2013-9-23
25
2、数据交换指令FNC17/XCH(113) (新P108)
FNC17/XCH:将两个指定的目标操作数[D1]、[D2]
进行相互交换。
使用说明:
①数据进行一次交换,使用脉冲执行型指令XCH(P),
连续执行型指令在每个扫描周期都交换数据。
②如果特殊继电器M8160接通,目标操作数[D1]、[D2] 为同一地址,则进行的操作是操作数中的高8位和低8 位进行交换。
输入、输出刷新指令FNC50/REF:成批读入最新输入 的信息或成批将操作结果输出。(比较:基本指 令中:LD X0,OUT Y0,单个输入输出指令。)
使用说明: ①数据从输入端子读入到输入映像寄存器中;输出 的数据由输出映像寄存器经输出锁存器到输出端 子。 ②指定的操作元件必须是X或Y,元件号是10的整数倍, 即刷新点数是8的倍数(八进制)。
2013-9-23 40
X0、M10是10个连号元件的第一个,其余的为: X1、···、X7、X10、X11等, M11—M19。它们互为对应 关系。X输入元件,M读出元件,读的数据存入D0。 如按下X2、X1、X3、X0键,寄存器D0存入的数据为2130。
2013-9-23 41
九、外围设备指令(179) (新P170)
2013-9-23 36
Y0为输出端,D0寄存器储存的数据为输出 脉冲的个数,K100 为输出脉冲频率。
2013-9-23 37
七、方便指令(154) (新P147) 状态初始化指令FNC60/IST:当执行条件满足时,一些 内部继电器及特殊继电器的状态在自动设定的状态。
X20为指定输入端,自动操作中使用的状态器序号 为S20——S40。当PLC开始工作时,M8000自动为 ON状态。这时,状态器S20——S40自动恢复到设定 的状态。
器称为标志位。
标志位有三种: 一般标志位、运算出错标志
位、功能扩展用标志位。
2013-9-23
10
如:4个标志位: M8020: 零标志,运算结果为0,则动作(置1)。 M8021:借位标志,运算结果出现借位,即作减法时不够 减。则动作(置1)。 M8022:进位标志,运算结果出现进位,则动作(置1) M8029:指令执行结束标志。
2013-9-23 3
2、参数
① 源操作数。功能指令执行后,其内容不变,用 [S.]表示。如加数(D10)、(D12)。 ② 目标操作数。功能指令执行后,其内容改变,用 [D.]表示。如加法的结果(D14)。 ③ 其它操作数。一般是操作所涉及的常数或补充说 明的参数。
2013-9-23
4
功能指令的分类与操作数说明 一、 功能指令的分类 (P新349 ,280,附表2)
第六章
一、功能指令的定义
PLC功能指令系统
第一节 功能指令的表示形式及含义
也称为应用指令,是能够完成一定任务,功能不
同的子程序。主要用于数据的传送、运算、变换及程 序控制等功能。 FX系列PLC有14类,共247条功能指令。
2013-9-23
1
二、功能指令的表示形式 采用功能框的形式来表示功能指令。功能框 包括功能指令的名称和参数,参数是与功能指令 相关的数据或地址。
2013-9-23 34
FX的输入继电器X和输出继电器Y最多是184点,其编 号采用八进制,编号范围X0—X267 和Y0—Y267。
当X0 → ON 时,读入X10-X17共8个点的数据。 当X1 → ON 时, Y0-Y7、Y10-Y17、Y20-Y27共24个 点的输出端被刷新。 2013-9-23 35
2013-9-23
30
使用说明: ①执行右移操作的数据可以是16位,也可以是32位。 ②向右移出的位,循环移入左边,最后移出位的状态同 时保存在进位标志M8022中。
2013-9-23
31
五、数据处理指令(135) (新P131)
全部复位指令FNC40/ZRST:当执行条件满足时,
指定操作区间的数全部复位OFF(0)。
2013-9-23
14
2)、中断用指针I 与一些应用指令配合使用,执行中断子程序。 中断子程序用“IRET” 指令返回。这些相应的功 能指令是: FNC03(IRET)中断返回指令; FNC04(EI)开中断指令;
FNC05(DI)关中断指令。
有三种中断,
外部输入中断、内部定时器中断、计数器中断。
2013-9-23 38
使用说明:
1、 [S]为指定输入端,有相关的自定义运行模式。
2、[D1]、[D2]为自动操作中使用的状态器S序号。 [D1]为最小序号,[D2]为最大序号。 3、当执行条件满足时,一些元件被自动控制。如特 殊继电器M8024为启动脉冲,状态器S0为手动操作初始 状态。
2013-9-23
第二节 程序流程指令、 传送与比较指令、 四则运算指令、 循环移位指令、 数据处理指令、 高速处理 方便指令、 外围设备指令(有3种) 、 浮点数指令、 定位指令、 时钟指令等、 接点比较指令 。
2013-9-23
5
二、操作数说明(参数) 1、数据寄存器 用来存储数据,可以通过指令对数据寄存器进行读 或写操作。 A、通用数据寄存器(D0-D199)
2013-9-23
7
2013-9-23
8
例:1)无变址时,D10中的数据直接传送到 D12中。 2)有变址时,V=8,Z=12,则变为D18→D24中。 说明:16位时,可以任意选用V或Z变址寄存器。
2013-9-23
9
3、标志位
功能指令在操作过程中,其运算结果要影响某
些特殊继电器或寄存器,这些特殊的继电器或寄存
2013-9-23
18
C、计数器中断
计数器中断有效时,就会执行该指针作为标 号后面的中断子程序,并依IRET指令返回。 有 6个计数器中断编号。
2013-9-23
19
第三节 功能指令说明
一、跳转及中断指令
1、条件跳转指令FNC00/CJ(P93)(新P88)
使用说明: ①前面的执行条件满足时,执行跳转。当功能指令的 执行条件为M8000时,为无条件跳转。其它执行条件为 有条件跳转。 ②在程序中,标号占一行,一个标号只能标示一个位 2013-9-23 20 置。在跳转指令中可以多次使用同一标号。
串行数据传送指令FNC80/RS:是使用PLC特殊功能扩展 板或适配器进行数据通信的指令。
2013-9-23
21
2、子程序调用指令(P96) (新P91)
• FNC01/CALL:子程序调用指令。 • FNC02/SRET:子程序返回指令。
• FNC06/FEND:主程序结束指令。子程序、中断
子程序必须写在FEND之后,END之前。 • END:程序结束指令。
2013-9-23 22
2013-9-23
2
三、功能指令的含义
1、功能指令的名称
① 功能代号。FNC00—FNC246。(P新349,280,附表2)
② 助记符。表示其功能。如ADD表示执行加法运算。 ③ 数据的长度。(D) 有:表示操作的数据为32位; 无:表示操作的数据为16位。 ④ 脉冲/连续执行标志。有(P):表示该功能指令只使 用一次;无:表示在每一个扫描周期都执行该指令。
• FNC01(CALL)子程序调用指令;
• FNC02(SRET)子程序返回指令;
• FNC06(FEND)主程序或子程序结束指令;
2013-9-23
• END 程序结束指令。
13
分支指令用的指针P共有64点,即P0-P63,为一些应用 指令提供跳转地址目标。指针P可以改变程序的执行方向。 P63是一个特殊的指针,是直接跳转到END的指针。 例:X20接通时,程序执行跳转,到标号为P0的位置。 右图中,X2接通时,程序执行跳转,到END位置。