【CN109677502A】一种机器人仿生足部机构及双足机器人【专利】
一种双足机器人控制系统及双足机器人[发明专利]
![一种双足机器人控制系统及双足机器人[发明专利]](https://img.taocdn.com/s3/m/0499fb0281c758f5f71f6730.png)
专利名称:一种双足机器人控制系统及双足机器人专利类型:发明专利
发明人:甘春标,田蒋仁,能一鸣,徐小锋,叶靖,朱小京申请号:CN201810795789.2
申请日:20180719
公开号:CN108983660A
公开日:
20181211
专利内容由知识产权出版社提供
摘要:本发明公开了一种双足机器人控制系统,包括:集成主控模块,用于接收用户指令、视觉处理、对机器人进行步态规划、实时监测机器人的位姿并进行反馈控制;半集成辅助控制模块,与集成主控模块连接,用于控制系统电源管理,实时接收集成主控模块的步态规划信号并转成机器人驱动信号;视觉模块,与集成主控模块连接,用于获取图像信息给予机器人步态规划的视觉帮助;IMU惯性测量模块,与集成主控模块连接,用于测量运行中机器人的位姿信息并反馈给集成主控模块。
本发明由集成主控模块和半集成辅助控制模块配合控制,分工明确,控制功能更加全面,能裁剪控制系统在机器人控制数据传输上耗费的时间,且能实时进行机器人运动状态的反馈和显示。
申请人:浙江大学
地址:310058 浙江省杭州市西湖区余杭塘路866号
国籍:CN
代理机构:杭州宇信知识产权代理事务所(普通合伙)
代理人:刘艳艳
更多信息请下载全文后查看。
双足机器人[发明专利]
![双足机器人[发明专利]](https://img.taocdn.com/s3/m/8e402f2008a1284ac950437a.png)
专利名称:双足机器人
专利类型:发明专利
发明人:张巍,杨泽一
申请号:CN202110119876.8申请日:20210128
公开号:CN112776913A
公开日:
20210511
专利内容由知识产权出版社提供
摘要:本发明公开了一种双足机器人,包括主体、平衡部、大腿部、小腿部及足部,平衡轮与主体转动连接,第一驱动件用于驱动大腿本体相对主体转动,第二驱动件用于驱动小腿本体相对大腿本体转动,第三驱动件用于驱动转轮转动,辅助轮能够跟随转轮的转动而转动。
本发明中的双足机器人,能够同时兼容站立行走、跪姿行走与跳跃的运动方式,并且各个运动形态,可进行快速切换,使用灵活度高,机器人无论以何种姿态运动,均能保持良好的运动稳定性。
申请人:南方科技大学
地址:518055 广东省深圳市南山区西丽学苑大道1088号
国籍:CN
代理机构:广州嘉权专利商标事务所有限公司
代理人:谢岳鹏
更多信息请下载全文后查看。
一种双足行走机构及双足行走机器人玩具[实用新型专利]
![一种双足行走机构及双足行走机器人玩具[实用新型专利]](https://img.taocdn.com/s3/m/bddd08f86c175f0e7dd1373c.png)
专利名称:一种双足行走机构及双足行走机器人玩具专利类型:实用新型专利
发明人:陈永锋
申请号:CN200920318189.3
申请日:20091223
公开号:CN201684415U
公开日:
20101229
专利内容由知识产权出版社提供
摘要:一种双足行走机构,包括动力组件、装配该动力组件的方形箱体、受该动力组件驱动的腿部组件以及安设该箱体的“T”形支架,所述箱体设置在该“T”形支架的上部,所述腿部组件设置在“T”形支架的两侧,所述动力组件包括动力构件、受该动力构件带动的齿轮组以及两个转动方向相反且位置相对的偏心轮,该偏心轮与所述齿轮组传动配合并且设置在所述箱体外部,所述腿部组件包括两个摆动方向相反且长度相同的腿部构件,所述腿部构件的上端包括一圆形穿孔,该圆形穿孔与所述偏心轮套接,所述腿部构件的中部包括一椭圆形穿孔,该椭圆形穿孔内穿插有一圆形柱体,所述圆形柱体固定于所述“T”形支架的下部。
申请人:陈永锋
地址:518000 广东省深圳市南山区蛇口南海大道1077号北科创业大厦
国籍:CN
代理机构:深圳市凯达知识产权事务所
代理人:王琦
更多信息请下载全文后查看。
一种两用仿生机器人脚部结构及使用方法[发明专利]
![一种两用仿生机器人脚部结构及使用方法[发明专利]](https://img.taocdn.com/s3/m/9fcec10666ec102de2bd960590c69ec3d5bbdb97.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011214761.9(22)申请日 2020.02.25(62)分案原申请数据202010114801.6 2020.02.25(71)申请人 江苏工程职业技术学院地址 226000 江苏省南通市青年中路87号(72)发明人 师阳 (74)专利代理机构 南通毅帆知识产权代理事务所(普通合伙) 32386代理人 刘纪红(51)Int.Cl.B62D 57/028(2006.01)(54)发明名称一种两用仿生机器人脚部结构及使用方法(57)摘要本发明公开了一种两用仿生机器人脚部结构及使用方法,包括底座、密封装置和行驶装置,密封装置包括横板、竖板、常闭开关和钢丝绳,行驶装置包括液压缸、滚轮和动力杆,底座的各表面均呈矩形状,底座的上表面开设有贯穿底座的密封腔,密封腔的内侧壁下端开设有滑槽,滑槽与宽度与密封腔的宽度适配,滑槽的内侧壁滑动插接有横板,横板的表面与滑槽适配。
通过设置宽大的骆驼脚状的仿生机器人脚部结构,从而便于在沙地进行行走,通过在底座的上方固定向下推动活塞杆的液压缸,并通过活塞杆固定带有滚轮的横杆,通过控制两竖板分离将滚轮顶出并支撑起仿生机器人,进行平地行驶,从而具有在沙地和平地两种地形切换行走方式,提高行走速度的特点。
权利要求书1页 说明书4页 附图5页CN 112319645 A 2021.02.05C N 112319645A1.一种两用仿生机器人脚部结构的使用方法,包括底座(1)、密封装置和行驶装置,其特征在于:所述密封装置包括横板(2)、竖板(3)、常闭开关(4)和钢丝绳(5),所述行驶装置包括液压缸(6)、滚轮(7)和动力杆(8),所述底座(1)的各表面均呈矩形状,所述底座(1)的上表面开设有贯穿底座(1)的密封腔(9),所述密封腔(9)的内侧壁下端开设有滑槽(10),所述滑槽(10)的宽度与密封腔(9)的宽度适配,所述滑槽(10)的内侧壁滑动插接有横板(2),所述横板(2)的表面与滑槽(10)适配;所述横板(2)的上表面末端固定连接有竖板(3),所述竖板(3)的宽度与横板(2)适配,两个所述竖板(3)的相对侧壁和两个所述横板(2)的相对侧壁均固定连接有密封层(11),所述密封腔(9)的内侧壁开设有插槽(12);其使用方法为:步骤一,将此仿生机器人脚部结构连接机器人的腿部末端,并与液压缸(6)和电机(19)电性连接,通过机器人本体为仿生机器人脚部结构提供动力;步骤二,通过设置电机(19)和液压缸(6)收缩将两竖板(3)闭合,从而在沙地利用仿真骆驼状的宽大的脚掌进行行走;步骤三,通过驱动电机(19)输出轴旋转缠绕钢丝绳(5),从而将两竖板(3)分离,当限位杆(13)收缩进插槽(12)至按下常闭开关(4)时,电机(19)停止,液压缸(6)启动,活塞杆(20)带动横杆(21)及滚轮(7)下压至抬起机器人本体,使得底座(1)不直接与地面接触,从而通过滚轮(7)在平地行驶。
一种类人双足机器人[发明专利]
![一种类人双足机器人[发明专利]](https://img.taocdn.com/s3/m/b0cf01260508763230121265.png)
专利名称:一种类人双足机器人专利类型:发明专利
发明人:刘涛,黄东华,樊武
申请号:CN201910156734.1申请日:20190301
公开号:CN109795576A
公开日:
20190524
专利内容由知识产权出版社提供
摘要:本发明公开了一种类人双足机器人,其包括含轻量化大力矩输出膝关节的大腿结构和大力矩输出的二自由度类人髋关节结构;大腿结构中设计了轻量化膝关节,将交流伺服电动推杆设计安装在大腿结构中,通过曲柄连杆机构传动实现轻量化膝关节大力矩输出的单自由度运动,调节大腿配重单元可以调整大腿结构的质量、质心及转动惯量,可根据实验需要选取相应的小腿假肢与大腿结构中的膝关节相连;所述的二自由度类人髋关节结构,通过大力矩交流伺服电机、同步带传动、并联二自由度结构实现髋关节的二自由度运动,其上可添加配重用于调节类人双足机器人质量、质心及转动惯量。
本发明可以用于进行相关的人体步态研究、下肢机电产品检测与开发等。
申请人:浙江大学
地址:310058 浙江省杭州市西湖区余杭塘路866号
国籍:CN
代理机构:杭州求是专利事务所有限公司
更多信息请下载全文后查看。
一种仿人双足机器人[实用新型专利]
![一种仿人双足机器人[实用新型专利]](https://img.taocdn.com/s3/m/2e64d630ad51f01dc281f1e9.png)
专利名称:一种仿人双足机器人专利类型:实用新型专利
发明人:盛毅,李刚
申请号:CN201820117903.1申请日:20180124
公开号:CN207843102U
公开日:
20180911
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种仿人双足机器人,包括脚底板、平板、小腿和大腿,所述脚底板的右侧设置有第一伸缩杆,且脚底板的底端固定有防滑垫,所述脚底板的左侧设置有脚趾,且脚趾的底端固定有防滑垫,所述脚底板的上侧设置有脚背板,且脚背板上设置有滑轨,所述平板通过滑轨与脚背板相连接,且平板的下端设置有防震装置,并且防震装置位于脚背板的内侧,所述小腿通过第一转轮与平板相连接,且小腿位于平板的右上侧,所述大腿通过第二转轮与小腿相连接,且大腿位于小腿的上侧。
该仿人双足机器人,解决了该机器人在瓷砖地面上行走时,容易滑倒,不方便行走的问题,解决了机器人行走僵硬的问题,以及解决了机器人上坡或下坡容易下翻的问题。
申请人:淮阴师范学院
地址:223300 江苏省淮安市淮阴区长江西路111号淮阴师范学院
国籍:CN
更多信息请下载全文后查看。
一种双足机器人柔性足部结构[发明专利]
![一种双足机器人柔性足部结构[发明专利]](https://img.taocdn.com/s3/m/6d5b422d640e52ea551810a6f524ccbff121ca1e.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911323449.0(22)申请日 2019.12.20(71)申请人 浙江大学地址 310058 浙江省杭州市西湖区余杭塘路866号(72)发明人 甘春标 能一鸣 葛一敏 叶靖 袁璐 王小莹 李子静 (74)专利代理机构 杭州宇信知识产权代理事务所(普通合伙) 33231代理人 乔占雄(51)Int.Cl.B62D 57/028(2006.01)(54)发明名称一种双足机器人柔性足部结构(57)摘要本发明提供一种双足机器人柔性足部结构,至少包括基座板和设于基座板下侧的支承结构,支承结构包括两个连杆和可伸缩的弹性组件,连杆与基座板铰接,连杆包括第一支臂和第二支臂,第一支臂与第二支臂固定连接,且第一支臂和第二支臂之间的夹角小于180°。
弹性组件分别与两侧的第二支臂铰接。
当基座板受力向下移动时,连杆受力转动,第二支臂受力转动,第二支臂在转动过程中带动弹性组件压缩或拉伸,弹性组件在拉伸或压缩的过程中为连杆的转动提供缓冲,模拟人脚足弓的扩张缓冲作用。
本发明具有能够模拟人脚足弓的作用,更加符合人实际行走时的受力状态,同时使得机器人在模拟行走时具有更高的稳定性。
权利要求书1页 说明书5页 附图5页CN 110920768 A 2020.03.27C N 110920768A1.一种双足机器人柔性足部结构,其特征在于,至少包括:基座板(2);支承结构,所述支承结构至少为一个,所述支撑结构设置于所述基座板(2)的下端面上,所述支承结构至少包括两个连杆(1)和可伸缩的弹性组件(3),所述连杆(1)与所述基座板(2)铰接,所述连杆(1)至少包括第一支臂(11)和第二支臂(12),所述第一支臂(11)与第二支臂(12)固定连接,且所述第一支臂(11)与第二支臂(12)之间的夹角小于180°;所述弹性组件(3)连接于两侧的所述第二支臂(12)之间,且所述弹性组件(3)分别与两侧的所述第二支臂(12)铰接。
一种智能双足行走机器人[发明专利]
![一种智能双足行走机器人[发明专利]](https://img.taocdn.com/s3/m/ad9f22e2bb68a98270fefa49.png)
专利名称:一种智能双足行走机器人专利类型:发明专利
发明人:黄国彬
申请号:CN201710360679.9
申请日:20170521
公开号:CN106926257A
公开日:
20170707
专利内容由知识产权出版社提供
摘要:一种智能双足行走机器人,包括曲面显视系统、视觉传感系统、红外感应系统、驱动机构、陀螺稳定仪机构,所述大腿的上关节通过舵机与身体铰接,大腿下关节通过舵机与小腿上关节铰接,小腿下关节通过舵机与脚上盖铰接,在机器人的颈部安装有舵机,舵机能够控制机器人进行点头交流,头部的眼睛里面安装有能够进行人脸识别和记忆功能的视觉传感系统;所述舵机通过控制系统设置的程序能够进行控制腿部关节的运动,实现机器人的行走;所述曲面显视系统包括曲面显视屏和音频播放系统,曲面显示屏的上方安装有能够成像识别的红外感应系统,眼睛和舵机连接,舵机能够带动眼睛转动进行眼神交流。
申请人:黄国彬
地址:529090 广东省江门市蓬江区潮连大道6号江门职业技术学院
国籍:CN
更多信息请下载全文后查看。
一种双足机器人行走机构[发明专利]
![一种双足机器人行走机构[发明专利]](https://img.taocdn.com/s3/m/cd2a54ddee06eff9aff807d3.png)
专利名称:一种双足机器人行走机构
专利类型:发明专利
发明人:李涛,马克·切卡雷利,骆敏舟,吴晶华,张丽华申请号:CN201410446333.7
申请日:20140904
公开号:CN104369790A
公开日:
20150225
专利内容由知识产权出版社提供
摘要:本发明提供了一种双足机器人行走机构,包括腰部机构和两条结构相同的腿部机构,所述腿部机构对称设置连接于腰部机构两侧;所述腿部机构包括大腿机构和小腿机构,所述大腿机构由从上至下设置的切比雪夫机构和缩放仪机构串联连接组成,所述小腿机构由设置于小腿上部和小腿下部的两组平行四边形机构构成;所述小腿上部安装有小腿伸缩驱动电机,用于驱动调节小腿机构长度,从而调整行走机构的步态以跨越障碍物;所述腰部机构包括齿轮模组、轴承模组和腰部支架;通过规划腰部驱动电机的交替正反转实现腿部机构在行走过程中的转向;所述小腿机构上设置有用于实现轮式行走模式的滚轮,本发明具有功能多样、结构可靠、控制简单、成本低等优点。
申请人:中国科学院合肥物质科学研究院,常州先进制造技术研究所
地址:230000 安徽省合肥市蜀山湖路350号
国籍:CN
更多信息请下载全文后查看。
一种基于连杆机构的双足仿生机器人[发明专利]
![一种基于连杆机构的双足仿生机器人[发明专利]](https://img.taocdn.com/s3/m/31d826205fbfc77da369b11b.png)
专利名称:一种基于连杆机构的双足仿生机器人专利类型:发明专利
发明人:班书昊,李晓艳,蒋学东,何云松
申请号:CN201910607944.8
申请日:20190708
公开号:CN110329389A
公开日:
20191015
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于连杆机构的双足仿生机器人,属于仿生机器人领域,它包括机器人躯体,两个行走机构,机器人躯体上分别装设有两个大腿滑轮、小腿滑轮、大腿驱动滑块和小腿驱动滑块;机器人躯体上还装设有两个双杆气缸,分别独立控制两个行走机构运动;双杆气缸的前端活塞杆与大腿牵引绳的一端相连,其后端活塞杆与小腿牵引绳的一端相连;大腿牵引绳的另一端绕过大腿滑轮并与大腿驱动滑块的前端相连;小腿牵引绳的另一端绕过小腿滑轮并与小腿驱动滑块的后端相连;大腿驱动滑块的后端采用大腿复位弹簧与机器人躯体相连;本发明是一种腿部结构负载小更加轻型化、运动耗能低、采用连杆机构驱动前进的双足仿生机器人。
申请人:常州大学
地址:213164 江苏省常州市武进区滆湖路1号
国籍:CN
代理机构:南京纵横知识产权代理有限公司
代理人:董建林
更多信息请下载全文后查看。
一种全自动双足机器人[实用新型专利]
![一种全自动双足机器人[实用新型专利]](https://img.taocdn.com/s3/m/9c32bb6ef6ec4afe04a1b0717fd5360cbb1a8d49.png)
专利名称:一种全自动双足机器人
专利类型:实用新型专利
发明人:谢岳,杨勐,姚江毅,赵亮博,刘杰,闫迪,朱迪,徐敏,韩雅慧,马杨超,来纯强
申请号:CN202121202234.6
申请日:20220127
公开号:CN215971827U
公开日:
20220308
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种全自动双足机器人,涉及机器人技术领域,包括躯干支架、控制系统、监测终端和电源,躯干支架的顶部设有和监测终端通信连接的云台模块。
躯干支架的两侧分别设有手部,手部包括肩关节连接件,肩关节连接件上固设有万向球。
躯干支架的底部转动设置有腰部连接件,腰部连接件的两侧分别设有足部。
足部包括膝关节连接件,膝关节连接件的中部转动设有行进轮,手部和足部均与控制系统控制连接,监测终端和控制系统通信连接。
本实用新型利用云台模块检测到坡度较大的障碍物时,监测终端通过控制系统控制机器人从轮式前进转换为双足行走,跨越障碍物,适应复杂地形,提升侦察效率。
申请人:中国人民解放军陆军航空兵学院
地址:101116 北京市通州区台湖镇台湖大街9号
国籍:CN
代理机构:北京恒和顿知识产权代理有限公司
代理人:魏骞
更多信息请下载全文后查看。
一种多足协同仿生机器人[发明专利]
![一种多足协同仿生机器人[发明专利]](https://img.taocdn.com/s3/m/f27fa9074a35eefdc8d376eeaeaad1f346931181.png)
专利名称:一种多足协同仿生机器人专利类型:发明专利
发明人:梁丹,黄野,刘涛,胡凯,梁冬泰申请号:CN202111073005.3
申请日:20210914
公开号:CN114193465A
公开日:
20220318
专利内容由知识产权出版社提供
摘要:本发明公开了一种多足协同仿生机器人,主要包括仿生聚合物肌肉驱动机构、测距避障系统及可摆动置物装置。
仿生聚合物肌肉驱动机构利用连杆机构、齿轮机构、转向机构和人工肌肉作为主要驱动关节,壳体背部电机提供人工肌肉电能,配合连杆机构将直线移动转变为一定幅度的转动,实现腿部的前后摆动,协同一对锥齿轮及转向机构的传动即可实现装置的左右摆动。
测距避障系统由双目摄像头、超声波模块和控制模块组成,具有测距反馈和运动控制的功能。
可摆动置物装置通过摆动杆实现载物盒的左右摇动,具有装载功能。
本发明具有结构紧凑,运动稳定,环境适应性强、驱动机构灵活及避障能力强的优点,可应用于各种救援、运输工作中。
申请人:宁波大学
地址:315211 浙江省宁波市江北区风华路818号宁波大学
国籍:CN
更多信息请下载全文后查看。
【CN209617310U】一种机器人仿生足部机构及双足机器人【专利】
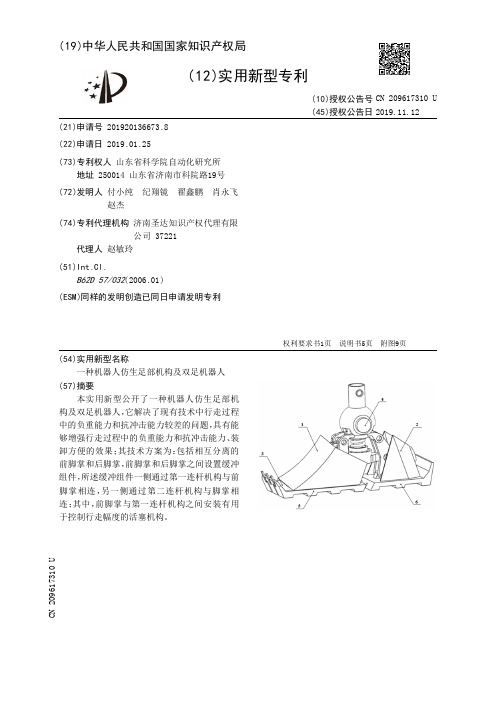
构及双足机器人,它解决了现有技术中行走过程 中的负重能力和抗冲击能力较差的问题,具有能 够增强行走过程中的负重能力和抗冲击能力、装 卸方便的效果 ;其技术方案为 :包括 相互分离的 前脚掌和后脚掌,前脚掌和后脚掌之间设置缓冲 组件,所述缓冲组件一侧通过第一连杆机构与前 脚掌相连 ,另一侧通过第二连杆机构与脚掌相 连;其中 ,前脚掌与第一连杆机构之间安装有用 于控制行走幅度的活塞机构。
公司 37221 代理人 赵敏玲 (51)Int .Cl . B62D 57/032(2006 .01) ( ESM )同样的发明创造已同日申请发明专利
(10)授权公告号 CN 209617310 U (45)授权公告日 2019.11.12
( 54 )实用新型名称 一种机器人仿生足部机构及双足机器人
权利要求书1页 说明书5页 附图9页
CN 209617310 U
CN 209617310 U
权 利 要 求 书
1/பைடு நூலகம் 页
1 .一种机器人仿生足部机构,其特征在于,包括相互分离的前脚掌和后脚掌,前脚掌和 后脚掌之间设置缓 冲组件 ,所述缓 冲组件一 侧通过第一连杆机构与前脚掌 相连 ,另一 侧通 过第二连杆机构与脚掌相连;
2
CN 209617310 U
说 明 书
1/5 页
一种机器人仿生足部机构及双足机器人
技术领域 [0001] 本实用新型涉及机器人领域,尤其涉及一种机器人仿生足部机构及双足机器人。
背景技术 [0002] 目前,双足步行机器人的足部机构在不同类型地面的行走适应能力远不如人类, 多数步行机器人的足部机构设计较为简单 ,很难完全模仿人类的 行走动作 ,而且简单的足 部结 构通常 在快速运 动或 负重时 会对机器人 产生较大的 冲击 ,不 利于实现柔性控 制和运 动,严重时会降低机器人零部件寿命甚至造成损坏。 [0003] 通过人类正常行走时,某一阶段是前、后脚掌形成一个夹角来发力迈出下一步,与 此同时 脚掌与脚腕间通过跟腱能起到一定的缓冲效果。而实 用新型人发现 ,当前的 一些双 足行走机器人的足部将前、后脚掌设计为一体,虽然可以满足基本行走的要求,但很难真正 模拟和人类一样的动作,在步行速度、抗冲击能力和适应性方面存在局限性。 [0004] 此外,一些双足机器人足部机构将足与腿直接刚性联接,通过控制膝关节和腿部 动作来实现正常行走的效果 ,足部与腿部之间没有缓 冲装置 ,这样会大大降 低机器人行走 过程中的负重能力和抗冲击能力,一定程度上限制其应用范围和应用场合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
公司 37221 代理人 赵敏玲 (51)Int .Cl . B62D 57/032(2006 .01)
(10)申请公布号 CN 109677502 A (43)申请公布日 2019.04.26
( 54 )发明 名称 一种机器人仿生足部机构及双足机器人
( 57 )摘要 本发明公开了一种机器人仿生足部机构及
发明内容 [0005] 为了克服现有技术的不足,本发明提供了一种机器人仿生足部机构,其具有能够 增强行走过程中的负重能力和抗冲击能力、装卸方便的效果。 [0006] 一种机器人仿生足部机构,包括相互分离的前脚掌和后脚掌,前脚掌和后脚掌之 间设置缓 冲组件 ,所述缓 冲组件一 侧通过第一连杆机构与前脚掌 相连 ,另一 侧通过第二连 杆机构与脚掌相连; [0007] 其中,前脚掌与第一连杆机构之间安装有用于控制行走幅度的活塞机构。 [0008] 进一步的,所述缓冲组件周向外侧具有连接部,缓冲组件下方安装主体支撑部。 [0009] 进一步的,所述缓冲组件包括弹簧和弹簧导套,所述主体支撑部具有导柱; [0010] 弹簧套设于导柱外侧并在弹簧导套与主体支撑部之间产生弹力。 [0011] 进一步的,所述弹簧导套包括套筒和其可拆卸连接的套筒盖,所述套筒远离套筒 盖一端具有压板,压板内侧与弹簧一端接触。 [0012] 进一步的,所述主体支撑部包括与导柱相连的中心支撑,中心支撑两侧设有分别 与前脚掌相连的第一连杆、与后脚掌相连的第二连杆; [0013] 所述导柱顶部安装有与弹簧导套滑动连接的滑动卡扣。 [0014] 进一步的,所述连接部包括中心连接件,中心连接件表面具有多个定位部,中心连 接件两侧设有分别与第一连杆机构相连的第三连杆、与第二连杆机构相连的第四连杆。 [0015] 进一步的,所述连接部通过定位部与球形外壳相连。 [0016] 进一步的,所述活塞机构包括与第一连杆机构铰接的滑杆、与前脚掌铰接的导向 筒,所述滑杆与导向筒滑动连接。
( 19 )中华人民 共和国国家知识产权局
( 12 )发明专利申请
(21)申请号 201910074991 .0 (22)申请日 2019 .01 .25 (71)申请人 山东省科学院自动化研究所
地址 250014 山东省济南市科院路19号 (72)发明人 肖永飞 付小纯 纪翔镜 赵杰 (74)专利代理机构 济南圣达知识产权代理有限
其中,前脚掌与第一连杆机构之间安装有用于控制行走幅度的活塞机构。 2 .根据权利要求1所述的一种机器人仿生足部机构,其特征在于,所述缓冲组件周向外 侧具有连接部,缓冲组件下方安装主体支撑部。 3 .根据权利要求2所述的一种机器人仿生足部机构,其特征在于,所述缓冲组件包括弹 簧和弹簧导套,所述主体支撑部具有导柱; 弹簧套设于导柱外侧并在弹簧导套与主体支撑部之间产生弹力。 4 .根据权利要求3所述的一种机器人仿生足部机构,其特征在于,所述弹簧导套包括套 筒 和其可拆卸连接的 套筒盖 ,所述套筒远离套筒盖一端具有压板 ,压板内 侧与弹簧一端接 触。 5 .根据权利要求3所述的一种机器人仿生足部机构,其特征在于,所述主体支撑部包括 与导柱相连的中 心支撑 ,中 心支撑两 侧设有分 别与前脚掌 相连的 第一连杆 、与后脚掌 相连 的第二连杆; 所述导柱顶部安装有与弹簧导套滑动连接的滑动卡扣。 6 .根据权利要求2所述的一种机器人仿生足部机构,其特征在于,所述连接部包括中心 连接件,中心连接件表面具有多个定位部,中心连接件两侧设有分别与第一连杆机构相连 的第三连杆、与第二连杆机构相连的第四连杆。 7 .根据权利要求6所述的一种机器人仿生足部机构,其特征在于,所述连接部通过定位 部与球形外壳相连。 8 .根据权利要求1所述的一种机器人仿生足部机构,其特征在于,所述活塞机构包括与 第一连杆机构铰接的滑杆、与前脚掌铰接的导向筒,所述滑杆与导向筒滑动连接。 9 .根据权利要求1所述的一种机器人仿生足部机构,其特征在于,所述后脚掌与前脚掌 的底面具有若干相间的凸起与凹槽。 10 .一种双足机器人,其特征在于,包括如权利要求1-9任一所述的仿生足部机构。
2
Байду номын сангаас
CN 109677502 A
说 明 书
1/5 页
一种机器人仿生足部机构及双足机器人
技术领域 [0001] 本发明涉及机器人领域,尤其涉及一种机器人仿生足部机构及双足机器人。
背景技术 [0002] 目前,双足步行机器人的足部机构在不同类型地面的行走适应能力远不如人类, 多数步行机器人的足部机构设计较为简单 ,很难完全模仿人类的 行走动作 ,而且简单的足 部结 构通常 在快速运 动或 负重时 会对机器人 产生较大的 冲击 ,不 利于实现柔性控 制和运 动,严重时会降低机器人零部件寿命甚至造成损坏。 [0003] 通过人类正常行走时,某一阶段是前、后脚掌形成一个夹角来发力迈出下一步,与 此同时 脚掌与脚腕间通过跟腱能起到一定的缓冲效果。而发明人发现 ,当前的 一些双足行 走机器人的足部将前、后脚掌设计为一体,虽然可以满足基本行走的要求,但很难真正模拟 和人类一样的动作,在步行速度、抗冲击能力和适应性方面存在局限性。 [0004] 此外,一些双足机器人足部机构将足与腿直接刚性联接,通过控制膝关节和腿部 动作来实现正常行走的效果 ,足部与腿部之间没有缓 冲装置 ,这样会大大降 低机器人行走 过程中的负重能力和抗冲击能力,一定程度上限制其应用范围和应用场合。
权利要求书1页 说明书5页 附图8页
CN 109677502 A
CN 109677502 A
权 利 要 求 书
1/1 页
1 .一种机器人仿生足部机构,其特征在于,包括相互分离的前脚掌和后脚掌,前脚掌和 后脚掌之间设置缓 冲组件 ,所述缓 冲组件一 侧通过第一连杆机构与前脚掌 相连 ,另一 侧通 过第二连杆机构与脚掌相连;