基于DSP的感应电动机转差型矢量控制系统
基于DSP的多相感应电机矢量控制系统的设计和实现
TMS 2 C 2 C 2 30 3 ( 3 )
具 有 精 度 高 和 性 价 比 高 的优 点 , 适
特 性 得 以 改 善 ; 用 相 冗 余 的 概 念 , 系 统 级 改 善 了 驱 采 在 动 系 统 的 可 靠 性 ; 用 多 相 冗 余 结 构 的 驱 动 系 统 , 多 采 当
的优 点 。
电 流分 量 i 然 后 像控 制 它激 式 直 流 电机 那 样 对磁 通 0,
和转 矩分 别 单独 控 制 L 。 2 J
在 同 步 旋 转 d 口 坐 标 系 中 , 择 转 子 磁 通 与 参 考 一 选 轴 d 轴 重 合 。 为 了 便 于 工 程 实 现 , 考 虑 多 相 感 应 电 不
广 泛 的 应 用。带 有 增 强 总 线 接 口 的 3 2位 浮 点 型
、
前 言
多 相 电 机 调 速 系 统 具 有 三 相 系 统 所 无 法 比 拟 的 优
势 _ : 可 用 低 压 功 率 器 件 实 现 大 功 率 ; 供 电 电 压 受 1它 在
限 的场合 , 功 率 的逆 变器 可用 单 个 功 率 器件 实 现 , 大 从
相 感 应 电 机 的 一 个 ( 几 个 ) 子 绕 组 开 路 或 逆 变 器 的 或 定
一
合 于 实 现 多 相 电 机 复 杂 的 矢 量 控 制 策 略 。 下 面 具 体 介
绍1相感 应 电机矢 量控 制系 统的设 计和 实现方 法 。 5
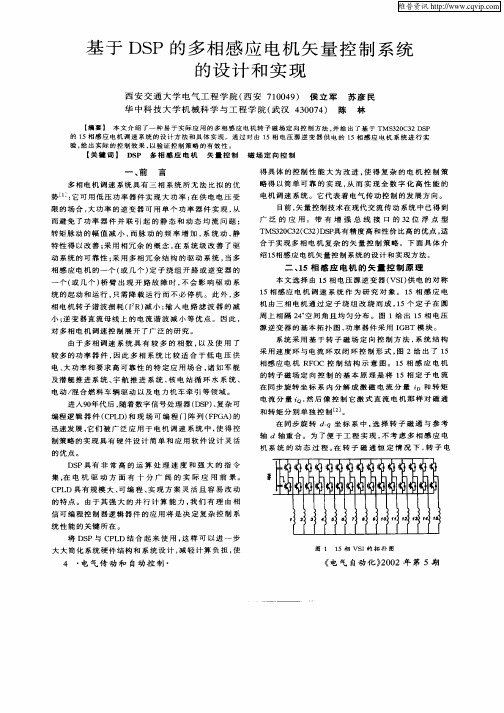
二 、 5相 感 应 电 机 的 矢 量 控 制 原 理 1
感应电动机转差型矢量控制系统的设计

感应电动机转差型矢量控制系统的设计1 引言感应电动机具有结构简单、坚固耐用、转速高、容量大、运行可靠等优点。
但是,由于感应电动机是一个高阶、非线性、强耦合的多变量系统,磁通和转矩耦合在一起,不能像直流电动机那样,磁通和转矩可以分别控制。
所以,一直到20世纪80年代都没有获得高性能的感应电动机调速系统。
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。
矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。
并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。
因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。
但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。
基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。
然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。
基于DSP的异步电动机矢量控制系统的设计

本系统选用电子旋转编码器 TRD - S2000B,检测 电机转速,形成闭环控制。TMS320LF2407 具有正交编 码器脉冲电路 QEP,通过光电编码器的两组脉冲的相 位( 上升沿的先后顺序) 可以判断出电机的运动方向, 通过记录脉冲的个数来确定具体的运动位置. 将位置 信号进行差分就可得到运动的速度。正交编码电路必 须选择一个计数器用于计算电路的输入脉冲次数,本 系统选用 Tl。当电机正转时,QEP 电路的方向检测逻 辑测定出连接到光电编码器 A 相的 QEP1 输入引脚 上,脉冲序列的相位领先于连接到光电编码器 B 相光 电编码器 QEP2 上的脉冲信号,然后产生一个方向信 号作为 T1 定时器的计数方向,计数器 T1CNT 递增计 数; 若电机反转,则计数器 T1CNT 递减计数。从光电 编码器输出的信号通过光耦进行光电隔离。
Vector control system design of three - phase asynchronous motor based on DSP
ZHANG Hong - lian ( North China Electric Power University,071003)
Abstract: The paper designs a vector control system of three - phase asynchronous motor based on DSP and intellectual power module ( IPM) . Using digital single processor TMS320LF2407 as control the core of system,using SKBPC3512 as the rectifier,using the intelligent power module PM25RLA120 as the inverter,and using space voltage pulse width modulation technology,we design digital PWM speed control system. This control system is of high control precision and a good real - time performance and a good dynamic characteristic.
基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇

基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇基于DSP的永磁同步电机矢量控制系统的研究与设计1基于DSP的永磁同步电机矢量控制系统的研究与设计随着现代电子技术的发展,控制技术逐渐成为重要的研究领域。
永磁同步电机作为一种高效、稳定的电机,已经得到广泛应用。
而矢量控制技术,则可实现对永磁同步电机的精确控制,提高其效率和稳定性。
本文,我们将介绍基于DSP的永磁同步电机矢量控制系统的研究和设计。
从系统架构、控制算法、硬件设计以及实验测试等方面,详细探究其原理和实现方法。
一、系统架构永磁同步电机矢量控制系统主要由两部分组成:控制器和电机。
其中,控制器采用DSP作为核心,运行矢量控制算法,将电机转速、位置等信息输入进行控制。
电机由永磁同步电机、驱动器和传感器组成。
二、矢量控制算法矢量控制算法主要包括两种:基于空间矢量分解的矢量控制和基于旋转矢量的矢量控制。
其中,基于空间矢量分解的矢量控制是通过将电机的空间矢量分解为定子和转子磁链矢量,控制其大小和相位差来实现永磁同步电机的转矩和转速控制;基于旋转矢量的矢量控制则是通过构建一个旋转矢量,并控制其与电机运动的相对位置来实现对电机的精确控制。
三、硬件设计在硬件设计方面,我们采用了一种小型化的设计方案,将DSP 与其他电路集成在一起,便于控制和维护。
电机驱动器采用了3相全桥逆变器,可实现对电机的相位和大小控制。
传感器为霍尔传感器,并通过反馈控制将电机转速等信息输入到控制器中。
四、实验测试为了验证所设计的永磁同步电机矢量控制系统的有效性,我们进行了实验测试。
通过转速和转矩测试,得到了电机在加速、减速、负载改变等情况下的运行特性。
实验结果表明,所设计的永磁同步电机矢量控制系统具有较高的控制精度和稳定性。
五、结论综上所述,基于DSP的永磁同步电机矢量控制系统的研究和设计可实现对永磁同步电机的精确控制,提高其效率和稳定性。
对于电机控制领域的研究和应用具有一定的参考和借鉴价值本文介绍了基于DSP的永磁同步电机矢量控制系统的研究和设计。
基于DSP的感应电动机矢量控制系统设计
可 靠性 。(1 2 矢量控 制 技 术严 重依 赖 电机 的 参 数 , 电机 参数 受环 境 、 而 温度 等 的 影 响运 行 时呈 时 变特 性 , 此 因 系 统 的 动 态 性 能 仍 不 尽 如 人 意 。这 些 问 题 限 制 了 交 流 调 速 系统 的 应 用 , 此 应 该 深 入 探 讨 和 完 善 矢 量 控 制 技 因
态 调 速 性 能 . 得 这 种 控 制 方 法 成 为 交 流 电 机 获 得 理 想 调 速 性 能 的 使
重要 途 径 。
二
矢 量 控 制 的 实 现
( ) 矢 量 控 制 的 原 理 一
矢 量 控 制 技 术 用 来 改 善 异 步 电 动 机 的 动 态 特 性 , 要 考 虑 电 流 需
术 理 论 . 对 于 交 流 调 速 系统 的 应 用 与 发 展 具 有 积 极 的 推 动 作 用 , 提 供 理 论 上 的 借 鉴 作 用 。 这 并
【 关键 词 】 感应 电动机 矢 量控 制
DS P
一
矢 量 控 制 技 术 简 介
矢 量 控 制 技 术 也 称 磁 场 定 向 控 制 。 在 感 应 电 机 中 , 了 将 交 流 为 矢 量 变 换 为 两 个 独 立 的 直 流 标 量 来 分 别 加 以 调 节 , 及 将 被 调 节 后 以
¨ 蒜 一
中国高 新技术 企业
基 于 D P 的 感 应 电 动 机 矢 量 控 制 系 统 设 计 S
文 /禹万林
【 要】 摘
变频 调 速技 术特 别 是 矢量 控 制技 术 有 着 突 出优 点 , 已在 交流 调速 领 域 得 到 广 泛应 用 , 其理 论 虽 但
与 应 用 仍 不 完 善 。 其 主 要 问 题 有 :1 在 高 性 能 矢 量 控 制 系统 中 需 采 用 速 度 闭 环 控 制 , 规 的 速 度 检 测 多 采 用 () 常 速 度 传 感 器 . 而 速 度 传 感 器 在 安 装 、 护 、 本 等 方 面 影 响 了 异 步 电 机 调 速 系 统 的 简 便 性 、 价 性 及 系 统 的 然 维 成 廉
基于DSP的矢量控制系统的设计与实现
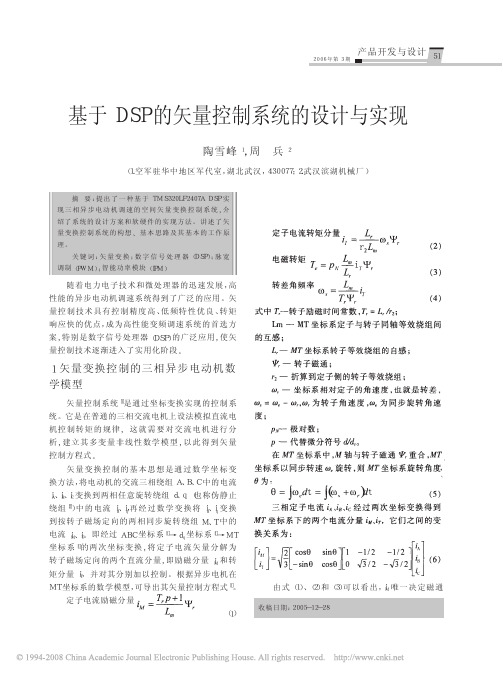
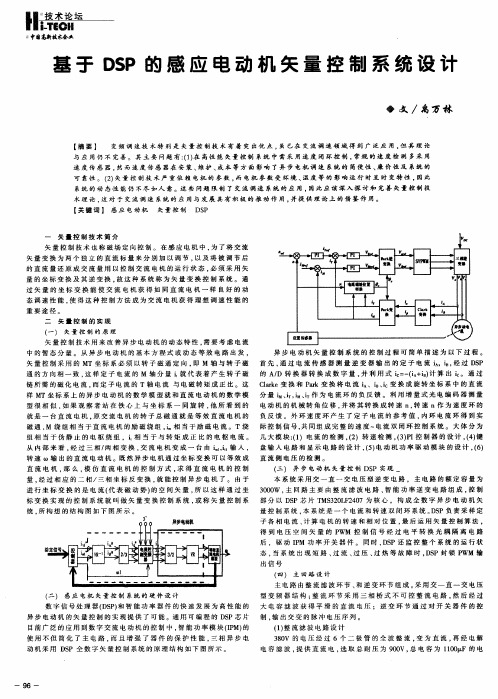
图 2 矢量控制系统结构框图
芯片为核心, 用来完成矢量控制核心算法、PWM 产 生、模/数转换等功能。辅助电路由开关电源、光电编 码器、电流传感器 及 滤 波 放 大 器 等 组 成 , 以 实 现 给 系统提供多路直流 电 源 、电 机 转 速 检 测 、定 子 电 流 检测及放大等功能。 3.1 主电路
4 软件设计
系统软件可分为两部分: 主程序和 PWM 中断子 程序, 主要 完成坐标变换、ASR 和 ACR 运 算 、PWM 产生等运算。为了保证转速控制精度, 可将电流变换 的坐标变换和 PWM 产生放在中断子程序中完成。
主程序完成系统电机参数的设定、中断初始 化、事件管理器初始化、转速检测、速度调节器 ASR 计算、磁通控制计算、转差频率计算等功能。中断服 务 子 程 序 包 括 定 子 电 流 检 测 、积 分 求 坐 标 系 旋 转 角 度 θ、坐 标 变 换 求 出 iT 和 iM, 双 电 流 调 节 计 算 uT* 和 uM*, 坐标变换计算出三相脉宽, 并产生 PWM 信号。
外部指令从通讯接口送入 DSP 控制器, DSP 内 核进行坐标变换, 算出磁场方向角 θ, 进行 PI 运算, 通过 PWM 发生电路产生 6 路具有可编程死区和可 变输出极性的 PWM 信号, 经隔离驱动单元后, 控制 主电路的智能功率模块 IPM, 实现逆变输出。 3.3 辅助电路
速度反馈信号的检测采用分辨率为 2500p/r 的 增量式光电编码器 [3], 它可输出两个相位差为 90° ( 电角度) 的方波脉冲信号, 直接送入 TMS320LF2407A 的正交编码脉冲接口单元( QEP[5]) 中, 经译码逻辑单元产生内部 4 倍频后的脉冲信号 CLK 和脉冲信号 相 位 , 得 到 电 机 转 子 的 速 度 和 转 向, 从而判断电机转子的位置和电机的转速。
基于DSP28335的七相感应电机矢量控制

基于D SP28335的七相感应电机矢量控制郭冀岭,肖建,邱忠才,罗鹏(西南交通大学电气工程学院,四川成都610031)摘要:七相感应电机因其缺相运行具有代表性近来受到关注。
采用空间解耦模型,对其基波子空间dq分量采用基于转子磁场定向矢量控制方法实现转矩和磁链解耦控制,鉴于其谐波子空间会产生谐波电流,采用了消除谐波的七相载波型UV M 调制方法,该法追加谐波子空间电压为零的约束条件并通过闭环控制得以保证,算法通用性强,开关损耗小,且能够有效消除定子谐波电流。
在计算机仿真基础上,以DSP芯片TM S320F28335为控制核心构建的七相感应电机变频调速系统,实验结果验证了控制方法的正确性和有效性。
关键词:七相感应电机;矢量控制;统一电压调制;消除谐波Vector Control of Seven-Phase Induction Motor Based on DSP28335GUO J i-li n g, X IA O J ian,Q I U Zhon g-cai,L UO Pe n g(College of Electrical Engineering,S outhwest Jiaotong University,C hengdu S ichuan610031,C hina)Abst r act:Th e seven-ph ase adjustable speed drive system h a s dra wn mo re a tten ti on for its typical o pen-ph ase faul t o perati on i n recen t years.B ased on th e mo del o f7-ph ase i n ducti on moto r, th e d-q fundam ental spatial c ompon en t were c ontro lled usi n g vec to r c ontro l strategy to c ontro l th e fl ux a n d to rque o f I M. Ho wever th e h a rmon ic c ompon ents o f currents were generated by th e h a rmon ic c ompon en t i n th e3rd a n d5th h a rmon ic subspace. Co m bi n ed wi th voltages i n h a rmon ic subspaces set to be zero,a no vel PWM, 7-ph ase UVM wi th h a rmon ic curren t elimi n ati on wa s pro po sed.B ased on th e simulati on a n alysis,experim en t results verified th e c ontro l strategy on th e7-ph ase I M adjust-speed platform wi th DSP c o re TM S320F28335.Ke y word s:seven-ph ase i n ducti on moto r;vec to r c ontro l;UVM; h a rmon ic elimi n ati on引言与传统三相电机调速系统相比,多相电机调速系统可用低压功率器件实现大功率,可以减小转矩脉动,可以采用相冗余提高驱动系统可靠性。
基于DSP的电动车用感应电机矢量控制研究
列 出矢量 控制 系 统 的 主要 控 制 方 程式 , 转 子磁
链 观测方 程为 :
=
南
式( 1 ) 中, 为转子磁链 ; 为转子时间常数 ; L 为 电机定、 转子互感 ; 为励磁电流 ; p为微分算子。
续 的控制 中 , 能用 直流 电机 的控制 方法 对 异 步 电 机 进 行控制 。采 用 两个 P I 调 节 器 分 别 对 励 磁 电 流 分
量 和转矩 电流 分 量进 行 闭环 控 制 , 给出 S V P WM 算
感应 电机矢量控制系统 的要求
。因此 , 有必要
法 所需 的两 相静止 坐标 电压矢 量 ( I I , ), 再 用 调制 算法 控 制 三 相 逆 变 器 桥 臂 的 开 通 关 断 得 到加
关键词
感应 电机
电动汽 车
矢量控制 B
S V P W M 调制算法
中图法分类号
T M 3 4 6 ;
文献标志码
近 年来 , 环 境 污 染 和 能 源 短 缺 问 题 日益 严 峻 , 节 能环保 成 为全 球 面 临 的重 要 问题 , 研 究 开 发 新 型 节 能环 保 电动 汽 车是 未 来 发 展 的 必 然 趋 势 。电 动 车 常用 的 电机 有 刷 直 流 电机 、 交 流 感 应 电机 、 永 磁 同步 电机 和 开 关 磁 阻 电 机 四种 。 感 应 电机 因结 构
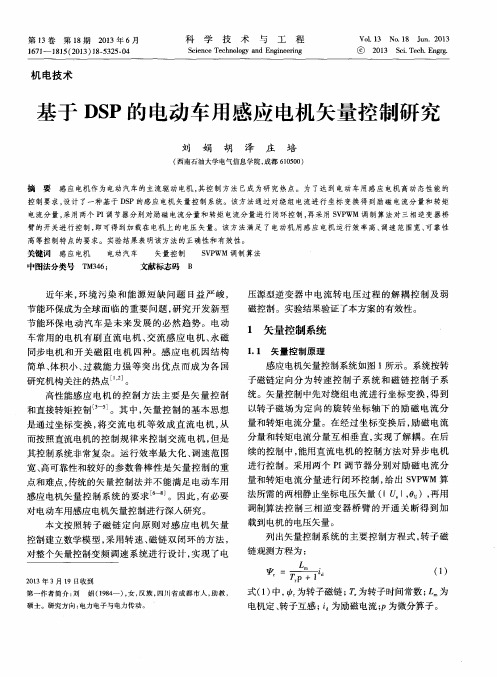
感应 电机矢量控制系统如图 1 所示 。系统按转
子磁 链定 向分 为转 速 控 制 子 系 统 和 磁 链 控 制 子 系 统 。矢量 控制 中先 对 绕 组 电 流进 行 坐 标 变换 , 得 到
基于DSP的无速度传感器转差频率控制系统
基于 DSP 的无速度传器感转差频率控制系统
周期为定时器 T 1 的 16 倍, 即对 16 个速度值平滑滤 波后, 在 1920Ls 时间内进行一次速度 PI 调节。在 模型参考自适应速度辩识环节中采用了变 P I 参数 的策略, 在启动阶段, 为了能快速估测出转子实际转 速, 比例及积分系数选 得较大, 试验中比例系 数为 800, 积分系数为 10。当估测转速接近给定转速时, 主要考虑的是估测转速的精度, 可将比例及积分系 数降低, 此时比例系数为 100, 积分系数为 10。在转 差转速调节中, 比例系数为 1. 5, 而积分系数为 0. 2。
第 37 卷第 3 期 2003 年 6 月
电力电子技术 P ower Electronics
Vo l. 37, No. 3 June, 2003
基于 DSP 的无速度传感器转差频率控制系统
李剑飞, 万淑芸, 尹 泉
( 华中科技大学, 武汉 430074)
摘要: 提出了利用异步电动机电压和定子电流来实时 辩识感应电动机速度的模型 参考自适应 系统。将此系 统 同传统的电压/ 频率协调控制的变频器系统结合 起来, 组成了无速度传感器转差 频率控制 系统。试验结 果表明, 此 系统具有较好的动、静态性能。
0~ + 5V 的直流电压量, 故还需一片 L F356 实现电 平转换的功能。 3. 2. 2 电压检测
电压检测也采用了磁平衡式霍尔元件 L EM 电 流模块。选用一个 10k8 , 75W 的功率电阻 R 直接 跨接在母线两端, 电流霍尔可以检测到所通过的电 流, 然后也利用采样电阻及运算放大器得到反映母 线电压的 0~ + 5V 的信号。
进行速度估计。其中状态和速度的渐进收敛性可由
基于DSP实现的矢量控制交流驱动系统
% $, % %—定子电流励磁分量和转矩分量
#—! " 与!轴间的电角度
% ), % *, % +—三相定子电流
! 系统硬件构成
系统采用了全数字化设计,由数字信号处理器 ,-. 和高速高精度 ) / , 转换芯片以及 0.1) 等作为 控制电路主体,集驱动保护于一体的 2.$ 模块和 高灵敏度的检测电路,还有高可靠性的开关电源技 术和快速的保护电路等组成。 !"# 主电路 主电路结构如图 3 所示,逆变部分采用了内含 第三 代 21*% 的 智 能 功 率 模 块 2.$ (三 菱 公 司 产 品) 。 2.$ 模块内部除了三相全桥 21*% 外,还内置 驱动电路、过流过热保护电路及放电用晶体管(对 小容量而言) 。由于 2.$ 的使用,使得主电路结构 大为简化且可靠性增强。 — 7E —
Hale Waihona Puke 图!矢量控制系统的构成框图
的转向信息。完成转速环的调节和进行电流 环的调节,对全数字化实现的电流环而言, 其周期越短越好,故应尽量减少定子电流的 采样与转换时间。为保证电流检测的精度和 速度,采用了 @% 型的霍尔电流传感器,并 经高精度(!3ABC() 、高速的双极性模数转换 器件 ),!7D=(美国 ), 公司产品)将定子电 流信息读入。对于不带中性点的三相交流异 步电动机来讲,因为三相电流之和为 E,所 以只要增加传感器和 ), 采样两相电流便可 以获得三相的信息。
!
!
+% 公司的数字信号处理芯片 +%&’#"," 设计开发 数控机床交流主轴驱动用有速度传感器型矢量控制 调速系统。
三相定子电流 ! +、 ! -、 ! . 经过两次坐标变换 得到同步旋转 )0 坐标下的两个电流分量 ! )、 ! 0, 它们之间的变换关系为
基于DSP的无位置传感器永磁同步电机矢量控制系统

WAN i—in L u—og G Qnna ,IG i n y
( ol eo fr t nE gneig N nh n n esy N nh n 3 0 9 C ia C l g f nomao n ier , ac a gU i ri , a c a g 0 2 , hn ) e I i n v t 3
V0 . 5 No 3 12 . Au . 0 6 g2 0
基 于 D P的 无位 置传 感 器 永磁 同步 S 电机 矢量控 制 系统
汪庆年 , 李桂勇
( 昌大学 信息工程学 院, 南 江西 南 昌 30 2 ) 30 9
摘
要: 讨论 了一种采用 D P芯 片 T 3 0 F 4 7实现 无传感 器永磁 同步 电机转子 磁场 定向 矢量控 制 的方案 , S MS2 L 20 介
关键词 : 永磁 同步电机 ; 无传感 器; 场定向 矢量控制 ; 磁 数字信号处理器 中图分类号 :M 0 . T 3 12 文献标识码 : A
A r n n a n tS n h o o sM o o c o n r l Pe ma e tM g e y c r n u t r Ve t r Co t o S se Ba e n DS o e s re sS e d Co to y t m s d o P f r S n o ls p e n r l
维普资讯
第2 5卷第 3期 20 0 6年 8月
文章编号 :06— 89 20 ) 3— 0 4—0 10 4 6 ( 06 0 0 3 4
南 昌工 程 学 院 学 报
Ju n l fN n h n n tueo e h ooy o ra a c a gIsi t fT c n lg o t
基于DSP的感应电动机SVPWM矢量控制调速系统

DU iy n Zh — o g .W ANG a —a g2 Xi n f n , 3
( . n nMe h n a a dE e tc l n ier g C l g , n i g4 3 0 , hn ; 1 He a c a i l n l r a E gn e i ol e Xi a 5 0 2 C i c ci n e xn a
摘 要 : 量控 制 技 术 作 为 交 流异 步 电机控 制 的一 种 方 式 已成 为 高性 能 变 频 调 速 系统 的首 选 方 案 . 间 矢 量 脉 宽 矢 空 调 制 (p c etr us S aeV co P l e ̄it Mouao , dh d lin 简称 S P t V WM) 式 因具 有 比 S WM 调 速 方 式 更 优 异 的性 能 而 得 到 了 , 方 P 一 泛 应 用 。简 要 介 绍 了 S P V WM和 矢量 控 制 的基 本 原 理 ,运 用 T 3 0 F 4 7设 计 了一 种 简 化 的 S P MS2 L 2 0 V WM 实现 方 法 . 并 给 出 了变 频 调 速 系统 的全 数 字 化 实 现 。 通 过对 实 际 电机 的控 制 实验 结 果表 明 , 方 法 是 切 实 叮 行 的 . 该 且控 制 系 统 具 有优 良的动 静 态性 能和 较 好 的控 制 效 果 . 因此 应 用 前 景 广 阔 关键 词 : 应 电动 机 : 量 控 制 :变 频 调速 / 字 信 号 处 理 器 感 矢 数
基于DSP的三相交流异步电机矢量控制系统共3篇
基于DSP的三相交流异步电机矢量控制系统共3篇基于DSP的三相交流异步电机矢量控制系统1基于DSP的三相交流异步电机矢量控制系统随着现代工业技术的不断发展,电机产业也在不断进步和创新。
三相交流异步电机是电机中最常见的一种电机。
它具有结构简单、维护方便、使用范围广泛、价格便宜等特点。
因此,三相交流异步电机在各个领域得到广泛的应用。
然而,由于其控制复杂度和效率的问题,导致其在当今的应用中仍然存在一些不足。
为此,我们需要采用先进的技术来提高其性能表现,这就是基于DSP的三相交流异步电机矢量控制系统。
基于DSP的三相交流异步电机矢量控制系统是一种新型的电机控制系统,它的核心是数字信号处理器(DSP)。
在这个系统中,利用DSP最强大的计算处理能力,将三相交流异步电机的控制精度提高到了一个新的高度。
其原理非常简单,就是利用恰当的控制方法,控制三相交流异步电机的电流和磁通,使得电机具有良好的动态性能和静态性能,达到电机的最佳控制效果。
矢量控制系统是实现基于DSP的三相交流异步电机控制的核心思想。
该方法利用磁通和电流矢量的旋转定向控制电机的转矩和转速。
在该系统中,两个正交轴上的矢量可以分别控制电机的力矩和转速,从而实现对电机的控制。
此外,该系统还可以提供多种工作模式,满足不同工作环境的需求,提高电机的适应能力。
该系统的控制效果主要体现在以下三个方面:1. 精度高。
采用矢量控制方法,可以使得电机的控制精度比传统的控制方法更高,精度达到了0.1%左右,表现出了非常优秀的控制效果。
2. 动态性能好。
基于DSP的三相交流异步电机矢量控制系统具有良好的动态性能,其响应速度快,控制静态误差小,电机响应灵敏,转速范围广,可以适应各种工作环境。
3. 稳定性强。
在该系统中,通过对电机的电流和磁通进行控制,使得电机始终处于稳定状态,防止了电机产生“异步转速”现象。
同时,该系统还具有很好的抗干扰能力,工作稳定可靠。
总之,基于DSP的三相交流异步电机矢量控制系统是目前在电机控制领域中一种非常有效的控制方法,其控制精度高、动态性能好、稳定性强等优点具有非常广阔的应用前景。
基于DSP的感应电机SVPWM矢量控制系统
基于DSP的感应电机SVPWM矢量控制系统近年来沟通变频调速系统进展很快,已成为调速系统的主要讨论和进展方向。
1971年提出的矢量控制理论按照磁动势等效原则,应用坐标变换将三相系统等效为二相系统,再经过按磁场定向的同步旋改变换实现了定子励磁重量与转矩重量之间的解耦,从而达到对沟通电机的磁链和电流分离控制的目的。
这样就可将一台三相异步等效为直流电机来控制,因而获得了与直流调速系统同样的静、动态性能。
2 矢量控制的原理
矢量控制也称为磁场定向控制,其基本思路是模拟直流电机来控制,按照磁动势和功率不变的原则通过坐标变换,将三相静止坐标变换成两相静止坐标(即 Clarck变换),然后通过旋改变换将两相静止坐标变成两相旋转坐标(即 Park变换),在 Park变换下将定子电流矢量分解成按转子磁场定向的两个直流重量iM ,iT(其中iM称为励磁电流重量, iT 为转矩电流重量),并对其分离加以控制。
控制 iM就相当于控制磁通,而控制 iT就相当于控制转矩。
通过解耦,控制沟通电动机和控制直流电动机一样便利,图 1所示为矢量控制的结构框图。
3 空间矢量 SV的原理
空间电压矢量调制法是以三相对称正弦波电压供电时沟通电机的抱负磁通圆为基准,用不同的开关模式所产生的实际磁通去靠近基准圆磁通,并由它们比较的结果打算逆变器的开关状态,形成 PWM波形。
位于同一桥臂的功率管的导通状态是相反的。
当位于同一桥臂的上面的功率管导通时,下桥臂的功率管一定是关断的。
假设功率管导通状态为1,关断状态为0,我们只通过上桥臂功率管的开关状态(这里表示成开关向量[ a,b,c]T,可以推算出线电压向量[
及相电压向量
第1页共4页。
基于DSP的直线感应电动机矢量控制
o e l e ri d c in moo ,te e d ef c u c in wa d e c o d n o v co o t lt e r ft e id cin moo . ft n a n u t tr h n f t n t sa d d a c r i g t e tr c n r h o o h n u t tr h i o e f o o y o T e mo e f h o t ls s m a e n MA L / i l k w s e tb i e . d mu h s d b u e tr c nr lwa h d lo e c nr y t b s d o T AB S mu i a sa l h d An c t y a o tv co o t s t o e n s u o
( aj gU i r t o eoa t sa dA t nui , aj g2 0 1 , hn ) N ni nv sy f rn ui n s o at sN ni 1 0 6 C ia n e i A c r c n
Ab t a t A mah maia n l ss o o b e —s e sr c : t e t la ay i fa d u ld i d,s o ts c n a y l e r id c in moo a d c d h r e o d r i a n u t tr w s ma e,a d a — n o n n e
实验九 基于DSP的矢量变换控制与直接转矩控制变频调速系统2010
实验九 基于DSP的矢量变换控制与直接转矩控制变频调速系统一.实验目的1.了解以TMS320F240为核心构成的全数字控制感应电机变频调速实验系统的硬件与软件组成。
2.掌握采用正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)的感应电机开环变压变频(VVVF)调速系统的工作原理、优缺点及应用场合。
3.掌握采用磁场定向控制(FOC)与直接转矩控制(DTC)的感应电机变频调速闭环控制系统的工作原理、优缺点及应用场合。
4.掌握不同控制方式时的系统稳态与动态特性以及有关控制参数变化的影响。
5.掌握感应电机变频调速系统的实验研究方法,包括虚拟仪器的使用。
二.实验内容1.熟悉变频调速实验系统的配置与结构,在此基础上完成实验接线。
并通过仔细阅读“MCL-13(V1.1)上位机程序使用说明”,熟悉在上位机界面上进行实验操作的方法。
2.采用正弦脉宽调制(SPWM)的开环VVVF调速系统的实验研究:(1)分别在不同调制方式(同步、异步和分段同步)下,观测不同调制方式与有关参数变化对系统性能的影响,作比较研究:①在同步调制时,观测载波比变化对不同速度下,定子磁通轨迹的影响;②在异步调制时,观测载波频率变化对不同速度下,定子磁通轨迹的影响;③在分段同步调制时,改变频率分段与各段载波比,观测不同速度下定子磁通轨迹的变化。
④比较不同调制方式的优缺点,总结参数调试经验。
(2)测取系统稳态机械特性n=f (M);(3)观测并记录启动时电机定子电流和电机速度波形i v=f (t)与n=f (t);(4)观测并记录突加与突减负载时的电机定子电流和电机速度波形i v=f (t)与n=f (t);(5)观测低频补偿程度改变对系统性能的影响。
3.采用空间矢量脉宽调制(SVPWM)的开环VVVF调速系统的实验研究:(1)~(5)同前2。
4.采用磁场定向控制(FOC)的感应电机变频调速系统的研究:(1)在默认参数下,测取系统的稳态机械特性n=f (M),观察定子磁通轨迹;(2)观测并记录启动时电机定子电流和电机速度波形i v=f (t)与n=f (t);(3)观测并记录突加与突减负载时的电机定子电流和电机速度波形i v=f (t)与n=f (t);(4)研究速度调节器参数(P、I)改变对系统稳态与动态性能的影响;(5)研究电流调节器参数(P、I)改变对系统稳态与动态性能的影响;(6)研究转子回路时间常数(T2=L r/R r)改变对系统稳态与动态性能的影响;5.采用直接转矩控制(DTC)的感应电机变频调速系统的研究:(1)~(4)同磁场定向控制系统;(5)研究转矩与磁通调节器滞环宽度改变对系统稳态与动态性能的影响;(6)研究定子电阻变化对系统稳态与动态性能的影响;6.对以上不同控制方式下感应电机变频调速系统的性能进行比较研究。
基于DSP的感应电动机转差型矢量控制系统
基于DSP的感应电动机转差型矢量控制系统
李剑;郑红;王东
【期刊名称】《微计算机信息》
【年(卷),期】2003(000)006
【摘要】本文介绍了TMS320LF2407数字信号处理器的结构特点以及转差型矢量控制的实现方法,给出了基于DSP的矢量控制系统结构以及软件流程图.
【总页数】2页(P23-24)
【作者】李剑;郑红;王东
【作者单位】100083,北京航空航天大学1-34信箱;100083,北京航空航天大学1-34信箱;100083,北京航空航天大学1-34信箱
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于模糊控制的直线感应电动机转差频率矢量控制系统 [J], 王玉华;党智乾;王世荣;王蔚;易农
2.感应电动机转差型矢量控制系统设计 [J], 徐奇伟;吴凤江;安群涛;孙力
3.感应电动机转差型矢量控制系统的设计 [J], 徐奇伟;吴凤江;安群涛;孙力
4.基于DSP的异步电动机转差频率型矢量控制系统 [J], 闫哲;张永才;丛凌昊
5.基于DSP的感应电动机矢量控制系统设计 [J], 禹万林
因版权原因,仅展示原文概要,查看原文内容请购买。
DSP的矢量控制系统
目录一概述 (1)二异步电机矢量控制原理 (3)三异步电机矢量控制系统控制电路 (7)3.1主电路 (9)3.2 控制系统硬件电路 (11)3.2.1 SVPWM波形的产生 (12)3.3控制系统软件设计 (14)四工程实训心得.............. 错误!未定义书签。
一概述电力拖动系统发展到今天,已经不单是电动机拖动系统,还必须与高性能的控制系统相结合来满足生产机械提出的各种工艺要求。
随着人类社会文明的进步和发展,人们对现代工业及生活设备的性能要求也越来越高。
在这样的环境下,性能优良的自动电力拖动系统是必不可少的。
调速系统正是电机拖动技术和自动控制技术相结合的产物。
电气传动技术是以电机为控制对象,以微电子装置为控制核心,以电力电子功率变换装置为执行机构,在自动控制理论的指导下组成电气传动控制系统,以达到控制电机转速或转矩的目的。
电机控制系统主要分速度控制和位置控制两大类。
传统的电气传动系统一般指速度控制系统,对于位置控制(伺服)系统,目前国际上较多采用运动控制这一名称。
运动控制系统通过伺服驱动装置将给定指令变成期望的机构运动,一般功率较小,并有定位要求和频繁起制动的特点,在导航系统,雷达天线,数控机床,加工中心,机器人,打印机,复印机,磁记录仪等领域中得到广泛应用。
而在此方面,直流电机由于控制简单而被广泛的使用。
1971年德国学者Blaschke和Hasse提出了对交流电动机可以进行矢量变换控制,这是一种新的控制思想、新的控制理论和新的控制技术。
可以说,它的出现对交流电动机控制技术的研究具有划时代的意义.这种通过磁场定向构成的矢量变换交流闭环控制系统,其性能完全可以与直流系统相媲美。
正因如此,随着电力电子、微电子、计算机技术和微控制器的发展,矢量控制技术得以迅速应用和推广。
自关断器件的发展为PWM技术铺平了道路。
目前几乎所有的变频调速装置都采用这一技术。
PWM技术用于变频器的控制,可以改善变频器的输出波形,降低电动机的谐波损耗,并减小转矩脉动,同时还简化了逆变器的结构,加快了调节速度,提高了系统的动态响应性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP 的感应电动机转差型矢量控制系统
作者 李剑 郑红 王东
摘要:本文介绍了
TMS320LF2407数字信号处理器的结构特点以及转差型矢量控制的实
现方法,给出了基于DSP 的矢量控制系统结构以及软件流程图。
Abstract:This paper presents the characteristic of the structure of the TMS320LF2407 and the
realization of the vector control based on difference frequency. Give the system structure of vector control based on DSP and the flowchart of software.
关键词:数字信号处理器、转差、矢量控制 Keywords: DSP. Difference frequency. Vector control 1.引言
自从1971年西门子公司的Blaschke 提出磁场定向控制(即矢量控制)的理论以后,矢量控制技术已经成为高性能变频调速系统的首选方案。
它是以电机统一理论、电机能量转换和坐标变换为理论依据的。
矢量控制是把交流电动机模拟成直流电动机来控制,通过坐标变换把定子电流矢量1i 分解成转矩分量1t i 和励磁分量1m i ,由于1t i 和1m i 是解耦的,因而可以分别控制,但是,由于交流电机的数学模型是非线性强耦合的,因此它的控制较为复杂,特别是能否保证转子磁链矢量与M 轴始终一致,对交流电动机调速性能的影响很大。
普通的单片机难以实现较高的实时性和快速控制效果。
TI 公司推出的高性能16位数字信号处理器(DSP )TMS320LF2407A 具有很强的运算能力以及快速实时处理能力,非常适合于三相异步电动机的高性能控制,而且充分考虑了优化电机控制所需的硬件结构。
本文以TMS320LF2407A 为核心构造了一个矢量控制系统,试验表明,该系统具有良好的动、静态性能。
2.TMS320LF2407A 概述
TMS320LF2407A 是TI 公司DSP 控制器24x 系列中最新一款定点DSP 芯片,具有低成本、低功耗、高性能的处理能力,它将数字信号处理的运算能力与面向电机的高效控制能力集于一体,实现了用软件取代模拟器件,能够方便地实现各种复杂的控制策略,对电机的数字化控制提供了强大的支持。
TMS320LF2407A 的处理能力为30MIPS ,单指令周期仅为33.3ns 。
它具有32K 字的FLASH 存储器,基于FLASH 的芯片中有256K 字的引导ROM 使在线编程更加方便。
2407芯片具有两个事件管理器,由于电机数字化控制应用。
该模块包括PWM 发生器以及可编程死区控制,以防止桥式驱动主电路上下桥臂短路。
事件管理器模块可以实现同步10位A/D 转换功能,转换时间只有500ns ,提供多达16路的模拟输入,具有自动排序功能,使最大为16路的转换在同一转换期间进行而不会增加CPU 的开销。
具有双事件管理器也就意味着一个芯片可以控制多个电机。
TMS320LF2407A 集成有串行通信接口(SCI )、16位的同步串行外围接口(SPI )以及
符合CAN2.0B 规范要求的CAN 通信模块。
以上这些都为开发高性能的交流传动系统提供了完善的硬件设施。
3.矢量控制系统原理
矢量控制是利用坐标变换将三相系统等效为两相系统,经过按转子磁场定向的同步旋转变换,从而实现对定子电流励磁分量与转矩分量之间的解耦,达到分别控制交流电动机的磁链和转矩的目的。
在基于异步电动机在同步旋转坐标系M 、T 上的数学模型的基础上,矢量控制的基本方程为:
(1)
(2)
(3)
另外,其电压方程式为:
(4)
(5)
其中r m L T L R R 22
1'
1/+=。
1R 、r R 是定子和转子电阻,s L 、r L 、m L 定子、转子的电感以及二者之间的互感,1ω是
电源角频率,ω是转子角频率,2ϕ是转子磁通,2T 转子时间常数,m p 为电机极对数,p 是微分算子,1m i 、1m U 、1t i 、1t U 分别是励磁电流、电压,转矩电流、电压。
从(4)、(5)两式可以看出,M 轴与T 轴之间存在着耦合关系,设由M 轴至T 轴的耦合电动势为MT U ,由T 轴至M 轴的耦合电动势为TM U ,则:
11m s MT i L U ω−= 11t s TM i L U ω=
加入此两相解耦电动势后,可以实现M 轴与T 轴之间的解耦。
矢量控制系统框图如下:
2
211
ϕm
m L
p T i +=2
1ϕωs m
r r
t L R L i =
2
1ϕt r
m
m
e i L L p T =211111)(ϕωp L L i L i p L R U r
m
t s m s m +
−+=()
21'1111ωϕωr
m
t s m s t L L i p L R i L U +
++=
*
2Φ
*ω
图1 矢量控制系统
4.系统分析及软件实现
对于图1,*
2
ϕ可以由函数发生器得到,经过运算可以得到励磁给定电流,转矩电流可以通过调节器ASR得到,然后按照上边所分析的电压矢量解耦运算,可以计算出驱动电机所用的M轴和T轴电压。
通过转矩电流,还可以计算出转差频率,它与反馈回的速度相加,然后积分,可以得到空间电压矢量的位置信息,加入速度偏差校正后可以得到比较准确的电压矢量的位置值。
再经过2r/3s变换后可以输出驱动电机。
软件流程如下:
图2 主程序流程图3 中断程序流程系统软件部分主要完成A/D转换及数据处理,速度调节器ASR,以及坐标变换,极坐标变换,矢量控制等算法程序功能。
从以上程序流程图可以看出,速度估算或检测的精确程度对控制精度有着很大的影响,因此,要尽量保证速度的准确性。
关于速度检测或估算,许多文章都有叙述,在这里就不再赘述。
4.实验结果与分析
上述矢量控制系统实验采用交流电机,参数如下:36V,2A,1440r/min。
系统在15kHz 开关频率下运行,从0~50Hz变化,电流波形对称,运行平稳。
0~50Hz频率下阶跃启动的实测波形如图4所示。
图4阶跃启动响应波形
从实验波形可以看出,本系统的启动特性良好,动态响应快。
另外,由于TMS320LF2407集成了电机控制所需的硬件电路以及本身所具有的高速信号实时处理和运算能力,从而实现交流电机的高性能控制。
参考文献
冯垛生曾岳南. 无速度传感器矢量控制原理与实践. 北京:机械工业出版社,1997. 4
TI Company . TMS320F/C240 DSP Controllers Reference Guide CPU and Instruction set .1997 闫哲张永才丛凌昊. 基于DSP的异步电动机转差频率型矢量控制系统. 信息技术.2000 张维娜孙强. 基于DSP的高性能矢量控制系统. 电力电子技术. 2001.4
作者简介:李剑,北京航空航天大学自动化科学及电气工程学院硕士研究生,主要从事检测技术及自动化装置方向的研究工作。
通讯地址:北京航空航天大学1-34信箱邮编:100083。