110309航海自动化基础第一篇
航海学-第一篇基础知识
第一篇 基础知识第一章 坐标、方向与距离第一节 地理坐标一、地球形体船舶在海上航行时,需要确定船舶的位置、航向和航程,这就要求在地球表面建立坐标系和确定方向的基准线,因此要对地球的形状有一定的了解。
地球的自然表面是不平坦的,是一个非常复杂而又不规则的曲面。
陆地上有高山、深谷和平地;海洋里有岛屿和海沟。
因此,地球的自然表面不是数学曲面,不能直接在其上进行运算,也不能直接在其上建立坐标系。
航海上所研究的地球形状,是指由假想的大地水准面所包围的闭合几何体——大地球体。
所谓大地水准面,是指与各地铅垂线相垂直且与完全均衡状态的海平面相一致的水准面,详细地说大地水准面是与平均海面相重合且延伸至大陆底部的一个连续的、无叠痕的、无棱角的闭合曲面。
大地球体仍是一个不规则的球体,不是数学曲面,不能直接在其上进行运算,也不能直接在其上建立坐标系,怎么办呢?一般在航海上,以大地球体的近似体代替大地球体来建立坐标系进行航海计算,以地球园球体作为它的第一近似体,而以地球椭园体作为它的第二近似体。
1. 第一近似体——地球圆球体在解决一般航海问题时,为了计算上的简便,通常是将大地球体当做地球园球体,其半径R =6,371,110M 。
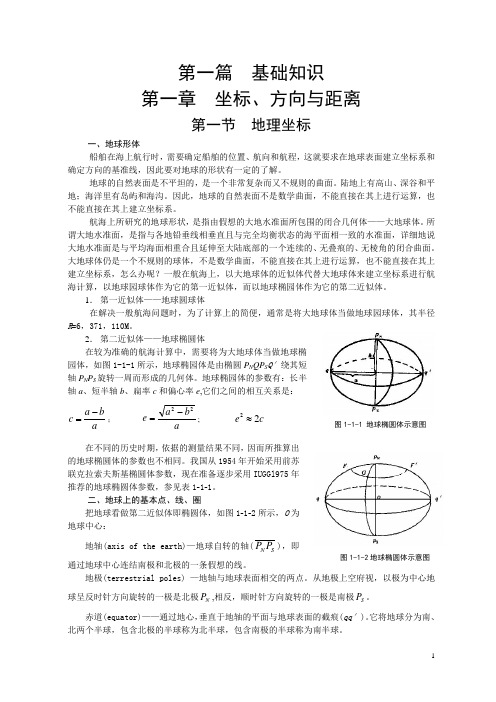
2. 第二近似体——地球椭圆体 在较为准确的航海计算中,需要将为大地球体当做地球椭园体,如图1-1-1所示,地球椭园体是由椭圆P N QP S Q ′绕其短轴P N P S 旋转一周而形成的几何体。
地球椭园体的参数有:长半轴a 、短半轴b 、扁率c 和偏心率e ,它们之间的相互关系是:a b a c -=; a b a e 22-=; c e 22≈ 在不同的历史时期,依据的测量结果不同,因而所推算出的地球椭圆体的参数也不相同。
我国从1954年开始采用前苏联克拉索夫斯基椭圆体参数,现在准备逐步采用IUGGl975年推荐的地球椭圆体参数,参见表1-1-1。
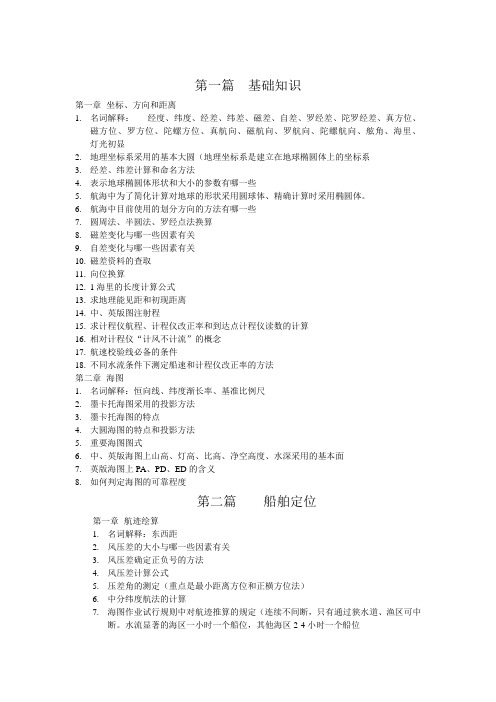
二、地球上的基本点、线、圈把地球看做第二近似体即椭圆体,如图1-1-2所示,O 为地球中心:地轴(axis of the earth)—地球自转的轴(S N P P ),即通过地球中心连结南极和北极的一条假想的线。
航海行业中船舶自动化技术的使用教程

航海行业中船舶自动化技术的使用教程航海行业一直在积极推动技术革新和自动化的发展。
船舶自动化技术的使用不仅提高了航行的效率和安全性,还减少了人为错误和疲劳驾驶的风险。
本篇文章将详细介绍航海行业中船舶自动化技术的使用教程,包括自动导航系统、自动驾驶系统、自动监测系统和自动控制系统等。
一、自动导航系统自动导航系统是船舶自动化技术中最基础也是最重要的部分。
它主要包括雷达、GPS和惯性导航系统等组成,可以帮助船舶在海洋中准确导航,并根据预设的航线自动行驶。
1. 雷达雷达是航海行业中最常用的导航工具之一。
它通过发射电磁波并接收其回波来探测出周围物体的位置和距离。
在使用雷达时,船舶上的操作员需要熟悉雷达的操作界面和功能,了解如何调整雷达的范围、增益和灵敏度,以及如何解读雷达屏幕上的信息。
2. GPS全球定位系统(GPS)通过卫星系统来确定船舶的精确位置。
船舶上的GPS接收器会接收卫星发出的信号,并计算出船舶的经纬度坐标。
在使用GPS时,船舶上的操作员需要了解如何正确配置GPS接收器、如何输入和更新目标航点,并能够正确解读和应用GPS导航信息。
3. 惯性导航系统惯性导航系统是一种基于船舶的推进力、速度和转向角度等参数计算船舶位移和方向的技术。
它通过使用陀螺仪和加速度计等传感器来检测船舶的运动状态,并根据运动状态数据进行实时计算。
在使用惯性导航系统时,船上操作员需要了解仪表的读数和标度,熟悉系统的校准流程,并知道如何根据系统提供的数据进行船舶导航。
二、自动驾驶系统自动驾驶系统能够根据事先设定的航线和航速自主控制船舶的航向和速度。
它使船舶能够按照预定的路线自动航行,减少了人为驾驶误差和疲劳驾驶的风险。
在使用自动驾驶系统时,船舶上的操作员需要了解系统的基本设置和操作流程。
操作员应熟悉设定航线、控制航速和启动自动驾驶模式的方法。
此外,操作员还需要了解如何监控系统的运行状态,掌握手动控制的方法以及处理紧急情况时的应急程序。
航海学一复习总结版

航海学一复习总结版第一篇基础知识第一章坐标、方向和距离1) 名词解释:①经度:基准经线与某点经线在赤道上夹的小于180°的弧,或该弧所对的球心角称为该点的地理经度,简称经度。
②纬度:地球椭圆体子午线上某点的法线与赤道平面之间的夹角,称为该点的地理纬度。
经差:两地之间经度的代数差。
纬差:两地之间纬度的代数差③磁差:由于磁北极和地理北极不重合,使得真北与磁北之间有一交角称为磁差.④自差:在地磁力和船磁力的共同作用下,使罗经卡的0°不再指向磁北,而指向它们的合力方向,这个方向称为罗经北,用N C表示。
罗北与磁北的交角称为自差,用Dev 表示。
⑤罗经差:罗北与真北之间的夹角称为罗经差,用ΔC表示。
⑥陀罗经差:真北与陀罗北之间的夹角称为陀罗经差,用ΔG表示。
⑦真方位:真北线与物标方位线之间的夹角称为该物标的真方位。
以真北为0°,顺时针000°~360°范围度量到方位线,用TB表示。
⑧磁方位:以磁北为基准的物标方位。
⑨罗方位:陀螺罗经测得的方位同陀螺方位。
⑩真航向:真北线与航向线之间的夹角称为真航向。
以真北为0°,顺时针000°~360°范围度量到航向线,用TC表示。
11 磁航向:以磁北为基准的航向罗航向:以罗北或陀罗北为基准测得的航向同陀螺航向:舷角:航向线与物标方位线之间的夹角称为该物标的舷角。
用“Q”表示。
12 物标左正横:当物标舷角为270°或90°左时,叫作物标左正横。
13 物标右正横:当物标舷角为90°或90°右时,叫作物标右正横;。
14 海里:地球椭圆体子午线上纬度1分对应的弧长称为一海里15 灯光初显:晴天黑夜,当船舶驶向强光灯塔时,测者看到灯塔灯芯刚刚露出水天线的瞬间,称为灯光初显。
2) 地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系)地轴和地极赤道纬度圈子午圈和经度线基准经线(格林子午线)3) 经差、纬差计算和命名方法1.经差(difference of longitude,):两地之间经度的代数差;计算公式:注意:1)运算中东经为“+”,西经为“—”。
航海学(一)复习要点
第一篇基础知识第一章坐标、方向和距离1.名词解释:经度、纬度、经差、纬差、磁差、自差、罗经差、陀罗经差、真方位、磁方位、罗方位、陀螺方位、真航向、磁航向、罗航向、陀螺航向、舷角、海里、灯光初显2.地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系3.经差、纬差计算和命名方法4.表示地球椭圆体形状和大小的参数有哪一些5.航海中为了简化计算对地球的形状采用圆球体、精确计算时采用椭圆体。
6.航海中目前使用的划分方向的方法有哪一些7.圆周法、半圆法、罗经点法换算8.磁差变化与哪一些因素有关9.自差变化与哪一些因素有关10.磁差资料的查取11.向位换算12.1海里的长度计算公式13.求地理能见距和初现距离14.中、英版图注射程15.求计程仪航程、计程仪改正率和到达点计程仪读数的计算16.相对计程仪“计风不计流”的概念17.航速校验线必备的条件18.不同水流条件下测定船速和计程仪改正率的方法第二章海图1.名词解释:恒向线、纬度渐长率、基准比例尺2.墨卡托海图采用的投影方法3.墨卡托海图的特点4.大圆海图的特点和投影方法5.重要海图图式6.中、英版海图上山高、灯高、比高、净空高度、水深采用的基本面7.英版海图上PA、PD、ED的含义8.如何判定海图的可靠程度第二篇船舶定位第一章航迹绘算1.名词解释:东西距2.风压差的大小与哪一些因素有关3.风压差确定正负号的方法4.风压差计算公式5.压差角的测定(重点是最小距离方位和正横方位法)6.中分纬度航法的计算7.海图作业试行规则中对航迹推算的规定(连续不间断,只有通过狭水道、渔区可中断。
水流显著的海区一小时一个船位,其他海区2-4小时一个船位8.无风流情况下,推算船位的误差产生的原因有哪一些?正常情况下,航向误差和航程误差各为多少?概率园的半径是多少?第二章陆标定位1.名词解释:船位差2.航海中常用的船位线有哪几种3.说出3种距离定位时判定双值性的方法4.距离定位时观测物标的顺序5.方位定位时观测物标的顺序和选择物标的原则6.三标方位定位时产生误差三角形的原因及处理方法7.倍角法、四点方位法、特殊角法定位的条件8.方位移线定位注意事项第三篇航行方法第一章大洋航行1.航线有哪几种类型2.大圆航线分段的原则3.选择大圆航线时应避开哪一些航行受限制的区域4.选择大圆航线时应考虑哪一些因素5.空白定位图有哪一些特点第二章沿岸航行1. 选择沿岸航线时应考虑哪一些因素2. 选择沿岸航线时,确定航线离岸距离时应考虑哪一些因素(一般数据)3.选择沿岸航线时,确定航线离危险物距离时应考虑哪一些因素第三章狭水道航行1.确定富裕水深大小时应考虑哪一些因素2.通过浅滩的有利时机高潮前一小时3.判定前方浮标是否有碰撞危险的方法4. 狭水道航行可以采用的导航方法、转向方法、避险方法有哪一些5.试述白天判定浅水礁盘存在的方法6. 试述平行方位转向法7.利用叠标导航修正航向的方法8.利用导标导航修正航向的方法第四章特殊条件下的航行1.雾中航行逐点航法的优缺点2. 雾中航行注意事项3.冰区航行注意事项4.利用雾号回声判定船与海岸距离的方法。
第1章 轮机自动化基础
第一颗人造卫星(苏联,1957年)
第一颗载人飞船(苏联,1961年)
人类首次登上月球(美国,1969年)
首架航天飞机(美国,1981年)
首次冲出太阳系(美国,1989年)
仿人机器人(日本,001年)
神州五号载人航天成功(中国,2003年)
勇气号、机遇号火星探测器(美国,2004年)
(1)定值控制;(2)程序控制;(3)随动控制。 2. 按动作方式: (1)连续控制;(2)断续控制(双位控制或多位控制) 3. 按控制精度: (1)有差调节;(2)无差调节
4. 按变量数: (1)单变量控制;(2)多变量控制
5. 按系统性质: (1)线性控制系统;(2)非线性控制系统 6. 按应用理论: (1)基于经典理论的控制; (2)基于现代控制理论的控制(最优控制、自适应控制);
t
0
fig.1-11
t
-0.8 -1 0 10 20 30 40 50 60 70
fig.1-13
ST
r(t)
h→0 1/h 0 h t
r(t) r(t)→∞
t 0 h→0时,称为理想的单 位脉冲函数,记作δ(t)。
fig.1-12
ST
§1-4
自动控制的性能指标
4.自动控制系统过渡过程的性能要求
§1-4
自动控制的性能指标
4.自动控制系统过渡过程的性能要求
(2)准确性:被控量偏离给定值的程度
评定指标: (a)定值控制系统:最大动态偏差emax;静态偏差Δys fig.1-15 ◎ (b)随动控制系统:最大动态偏差emax;超调量δ;静态偏
差Δys 。 fig.1-16 ◎
ST
y
y1
emax y3
航海学教材
航海学航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显着的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。
航海基础知识1(18-24h)

国际海上安全法规
包括《国际海上人命安全公约》 (SOLAS)、《国际防止船舶造 成污染公约》(MARPOL)等国
际公约和规则。
国内海上安全法规
各国根据国际公约和自身国情制 定的海上安全法规,如中国的 《海上交通安全法》等。
船舶安全管理制度
包括船舶安全检查、船舶报告制 度、船舶交通管理系统等。
应急处理流程演练
航海作用
航海在人类社会发展中起着重要作用,它是国际贸易、文化交流、科学考察等 活动的重要支撑,也是国家海洋权益维护和海上力量建设的重要组成部分。
航海历史沿革
古代航海
现代航海
古代航海主要依靠自然条件和简单工 具,如罗盘、星象等,航行范围有限, 风险较大。
现代航海技术得到了飞速发展,出现了 雷达、卫星导航等先进航海仪器和设备 ,大大提高了航海的安全性和效率。
世界地理分区
了解世界各大洲、大洋、 海、海湾、海峡、群岛等 地理实体的名称、位置和 特征。
航线分类
掌握世界主要航线,包括 大洋航线、近海航线、沿 岸航线等,了解各航线的 特点、距离和航行条件。
航线选择原则
根据船舶类型、货物种类、 气象海况、政治经济等因 素,合理选择航线,确保 航行安全和经济效益。
气象要素对航海影响分析
消防设备
包括灭火器、消防栓、消防泵等,船员应掌握其操作方法和注意 事项。
应急照明和通讯设备
包括应急照明灯、手持对讲机等,用于在紧急情况下提供照明和 通讯支持。
06 航海实践技能培养与评估
航海实践技能培养途径
航海模拟器训练
利用航海模拟器进行各种航海实践技能的训练,包括船舶操纵、避 碰、航线设计等。
导航系统组成与功能
卫星导航系统
船舶电气与自动化培训教材

11、一个好的教师,是一个懂得心理 学和教 育学的 人。21.6.1107:43:3907:43Jun-2111-J un-21
12、要记住,你不仅是教课的教师, 也是学 生的教 育者, 生活的 导师和 道德的 引路人 。07:43:3907:43:3907:43Friday, June 11, 2021
节的输出就是后一环节的输入,系统的输出 又经反馈通道送回到系统的输入端。这样, 控制系统就形成了一个封闭的控制回路,称 为闭环系统,反馈控制系统必定是闭环系统。
开环系统不再是反馈控制系统,无法根 据偏差来实现设备或生产过程的参数自动控 制。
三、反馈控制系统的工作过程 反馈控制系统按给定值的变化规律分类方法: 1、定值控制系统
正反馈是指经反馈能加强闭环系统输入效 应,即使偏差e增大。
负反馈是指经反馈能减弱闭环系统输入效 应,即使偏差e减小。
(5)前向通道与反馈通道 在控制系统传递方框图中,从系统的输入端
沿信号线方向到达系统输出端的通道称为前 向通道;而相反方向的通道则称为反馈通道。
(6)闭环系统 在反馈控制系统传递方框图中,前一环
组成一个反馈控制系统,必须有四个最基本的环节,即控 制对象、测量单元、调节单元和执行机构。
(1)控制对象 控制对象是指所要控制的机器、设备或装
置。把所要控制的运行参数叫做被控量。 在锅炉水位自动控制系统中,锅炉是控制
对象,水位是被控量。 在柴油机冷却水温度自动控制系统中,淡
水冷却器是控制对象,冷却水温度是被控量。 在柴油机转速自动控制系统中,柴油机是
13、He who seize the right moment, is the right man.谁把握机遇,谁就心想事成 。21.6.1121.6.1107:43:3907:43:39June 11, 2021
航海自动化题
1、航海自动化系统是船舶自动化的重要组成部分,包括了自动定位系统、最佳航线编制系统、自动操舵系统、自动避航系统,以及综合管理系统2、最优控制问题通常都包括系统的状态方程,系统的初态和终态,容许控制,性能指标四个组成部分3、模糊控制器的输入和输出都是非模糊量,但是系统内部都采用模糊量来推理,所以所有模糊控制器都由模糊化,模糊推理,去模糊化三个部分构成4、自动舵已经经历了机械式自动舵、PID自动舵和自适应自动舵这三个阶段,目前正处于第四个研究发展阶段即智能自动舵的研究5、智能控制系统按照构成原理可以分为专家系统、神经网络系统、模糊控制系统、仿人智能控制系统6、专家系统知识表示的常用形式有产生式规划,框架,过程,语义网络等等7、根据所采用物标的性质和观测手段,船位测定系统可分为路标定位系统、天文定位系统和无线电定位系统8、气象定线的方法:根据大型天气形式选择气象航线、作图法、动态规划三种最优控制:“最优”是指使控制系统实现对某种性能指标为最佳的控制。
自学习控制:具有辨识、判断、积累经验和学习的功能。
在控制系统的特性事先不能确切知道,或不能确切地用数学方法描述时,采用自学习控制可以在工作过程中不断地测量、估计系统的特性,并决定最优控制方案,实现性能指标最优控制。
自适应控制:系统能够在外部或内部条件不断变化情况下,不断地改变自身的结构和参数,使系统始终具有良好的性能。
自动化系统按功能主要分为线性系统和非线性系统线性系统:(具有叠加性和齐次性,可以用线性微分方程来描述)如果系统的数学模型方程是线性的,该系统就叫做线性系统。
非线性系统:(不适用叠加原理,用非线性方程来描述)用非线性微分方程来描述的系统叫做非线性系统。
时变系统:如果系统的参数随时间变化,则称其为时变系统。
时不变系统:如果系统的参数不随时间而变化,则称此系统为时不变系统连续系统:(连续时间系统)若系统的输入和输出都是连续时间信号,则称此系统为连续时间系统。
1.1基础知识
课时授课计划课次序号:0001一、课题:第一章基础知识—坐标二、课型:解疑存疑型三、目的要求:掌握三种地球近似体的概念,理解地理坐标的定义和度量方法,理解大地坐标系的基本概念。
四、重点、难点:有关经纬度的计算五、教学方法及手段:PPT 教学六、参考资料:航海学,大连海事大学出版社航海学习题集,山东交通学院海运学院主编七、作业:航海学习题集相关练习八、授课记录:九、授课效果分析:通过习题反馈效果绪论:航海学概要简单介绍航海学这门学科的主要研究内容,让学生从宏观把握学习航海学对航海的重要意义。
航线拟定确定船位:航迹推算--航迹绘算、航迹计算测定船位--陆标定位(地文航海)--天文定位(天文航海)--无线电定位(电子航海)航行方法:大洋航行、沿岸航行、狭水道航行特殊条件下航行(雾中、冰区、岛礁区航行)航海学还包括:航海学基础知识:坐标、方向和距离;海图航路资料:潮汐与《潮汐表》航标和《航标表》航海图书资料第一篇基础知识第一章坐标、方向和距离1.1地球形状,地理坐标与大地坐标系1.1.1 地球形状概述:研究坐标、方向和距离等⇒地球的形状;地球自然表面⇒难以用数学公式描述;珠穆朗玛峰8 848 m,仅为地球半径的千分之一;可以用占地球表面约71%的海水面来描述地球形状。
大地水准面:设想一个与平均海面相吻合的水准面,并将其向陆地延伸,且保持该延伸面始终与当地的铅垂线相垂直,这样所形成的连续不断的、光滑的闭合水准面,叫作大地水准面。
大地球体:由上述大地水准面所包围的几何体称为大地球体,是理想的地球形状。
所以用大地球体描述地球形状,大地球体是大地水准面围成的球体。
大地球体的三种近似体:(航海上常用的前两种)第一近似体:地球圆球体 概念:地球圆球体参数:R = 3 437.746 8 n mile = 6 366 707m应用:计算简便、精度要求不高。
如航迹计算,简易墨卡托海图绘制,大圆航向和航程计算 第二近似体:地球椭圆体 概念:地球旋转椭圆体参数:长半轴a 、短半轴b 、扁率c 、偏心率e关系:aba c -=:=e ab a 22- 所以:c c c aba b e 2)2()1)(1(2≈-=+-=应用:用于较精确的航海计算等,如定义地理坐标,墨卡托海图绘制第三近似体:地球椭球体,精度高,多用于军事航天等尖端领域。
航海学 第一章 坐标、方向和距离 1

垂直的平面。
大地水准面: (geoid) 设想一个与平均海面相吻合
的水准面,并将其向陆地延伸,且保持该延伸面 始终与当地的铅垂线相垂直,这样所形成的连续 不断的、光滑的闭合水准面,叫作大地水准面。
大地球体:大地水准面所包围的几何体称为大地
球体。航海学中所研究的地球形状就是指大地球 体的地球形状。
NW
INTRODUCTION TO MARINE NAVIGATION
• Celestial navigation involves reducing换算celestial measurements taken with a sextant to lines of position using calculators or水平線 computer programs, or by hand with almanacs and tables or using spherical trigonometry.
航海学所探讨之主要问题
1.如何测定自己的船位。 2.如何测定由某一位臵至另一位臵之航驶方向。 3.如何求取两地间之距离、速率及航驶之时间。
N
W
E
S
第一章 坐标、方向和距离
第一节 地球形状、地理坐标与大地坐标系
第二节 航向与方位 第三节 能见地平距离和物标能见距离 第四节 航速与航程
INTRODUCTION TO MARINE NAVIGATION
A good navigator anticipates dangerous situations well before they arise, and always stays “ahead of the vessel.” He is ready for navigational emergencies at any time. He is increasingly a manager of a variety of resources--electronic, mechanical, and human. Navigation methods and techniques vary with the type of vessel, the conditions, and the navigator’s experience. The navigator uses the methods and techniques best suited to the vessel, its equipment, and conditions at hand.
航海概论整理(第1-3章)

航海概论考试题型:一.选择题(单项,20*1)二.填空(10*2)三.判断题(20*1)四.名词解释(5*2)五.计算题(10*3)一.解释整理(背)(字体加粗部分为最后一节课划的重点,没有加粗的是之前划的)总载重量:总载重量是指船舶在某一吃水情况下所能装载的货物、燃润料、淡水、供应品及其他物品的总重量,该值等于装载排水量与空船排水量之差,即DW=D L-D l净载重量:净载重量是船舶具体航次所能装载货物的最大重量,等于载重量减去该航次总储备量(包括航次所需的燃润料、淡水、粮食、供应品、船员、行李等重量)及船舶常数,即NDW=DW-∑G-C 式中:∑G——航次总储备量(t) C——船舶常数(t)舱容系数:舱容系数是指货舱总容积和船舶净载重量的比值,即每一吨净载重量所拥有的货舱容积。
浮性:船舶在一定装载情况下的漂浮能力叫做船舶浮性。
抗沉性:抗沉性是指船舶在一个舱或几个舱进水的情况下,仍能保持不致于沉没和倾覆的能力。
稳性:稳性是指船舶在外力矩(如风、浪等)的作用下发生倾斜,当外力矩消除后能自行恢复到原来平衡位置的能力。
摇摆性:船舶在外力的影响下,作周期性的横纵向和偏荡运动的性能叫船舶摇摆性。
操纵性:船舶能保持和改变运动状态的能力叫做船舶操纵性。
地理纬度:地球椭圆体子午线上该点的法线与赤道面的夹角。
地理经度:地球椭圆体格林子午线(零度经线)与该点子午线在赤道上所夹的短弧。
海里:航海上度量距离的长度单位是海里,它等于地球椭圆子午线上纬度1’(分)的弧长。
相对湿度:实际水汽压与同温度下的饱和水汽压之比称为相对湿度,用百分数表示,即 f=(e/E)*100%露点:当空气中的水汽含量不变且气压一定时,减低气温,使空气刚好达到饱和时的温度称为露点,其单位与气温相同。
气团:气团是指气象要素(主要是指温度和湿度)的水平分布比较均匀的大范围的空气团。
气旋:大气中不仅存在着影响天气变化的气团和锋,同时还存在着各种各样、大大小小的空气涡旋,它们有的是呈逆时针旋转,有的呈现顺时针旋转,这些大型的水平涡旋称为气旋和反气旋。
航海电工基础 第1章
▪ (2)电压参考极性 ▪ 电路中某两点a、b间,在某一时刻的电压可能是
电压降,也可能是电压升。这一情况,在求解之 前也是不知道的,但描述电路元件性质和连接方 式的公式的列写也是与这个电压的极性有关的, 所以,在进行电路分析之前,我们也必须给出一 个假定的电压降方向,用“+”、“-”号表示, “+”号表示高电位端,“-”表示低电位端,称 为电压的方向。见如图所示的示例
航海电工基础
Basis of Marine Electrical Engineering
本课程的内容和作用
内容:
▪电路分析基础 ▪电机及变压器
作用:
本课程是为航海技术开设的一门必修课,是学习电子技 术基础、航海雷达和ARPA、航海仪器等后续课程所必须 的基础课程。
第一章 电路的基本概念与基本定律
▪ 常见的电阻
1载工作状态
▪ 当开关闭合时,电源与负载接通,称电路处于有载工 作状态,负载上流过正常的工作电流。
I E R0 RL
UL IRL E IR0
S
+ E-
R0
I
RL
UL
可见负载端电压与电源内阻有关。
ULI EI I 2R0 PRL PE PR0
▪ 电流i与电压u参考方向一致时称为关联,否则就是非 关联。如图所示。
i
a
b
+
u
-
1.2.3 电功率和电能量
1. 电功率 ▪ 单位时间内某电路所吸收或放出的能量称为该电
路的功率。若dt时间内,电路能量的变化为dw, 则定义电功率
p dw dt
▪ 一个二端网络所吸收或放出的功率与端电压、电 流的关系为
▪ 支路——电路中的每一支。如图中有六条分支。
大学船舶自动化基础教案
大学船舶自动化基础教案【教案名称】大学船舶自动化基础教案【教学目标】1. 理解船舶自动控制的基本概念与原理2. 掌握传感器与执行器的基本工作原理3. 理解PID控制器的工作原理与调节方法4. 能够设计船舶自动控制系统【教学内容】第一章船舶自动化概述1. 船舶自动化的发展历史2. 船舶自动化的基本原理和系统结构3. 船舶自动化在海上作业中的应用第二章传感器基础1. 传感器的基本概念与分类2. 传感器的工作原理及选型3. 光电传感器、超声波传感器、激光传感器等专用传感器第三章执行器基础1. 执行器的基本概念与分类2. 电机、气动元件、液压元件等执行器的工作原理及选型3. 舵机、推进器、螺旋桨等专用执行器第四章控制系统基础1. 控制系统的基本概念与分类2. 控制系统的组成部分及其功能3. 控制系统的结构与类型第五章 PID控制器1. PID控制器的基本原理及其应用2. PID控制器的调节方法3. PID控制器在船舶自动化中的应用实例第六章船舶自动化设计案例1. 船舶自动控制系统的设计方法与流程2. 船舶自动控制系统的选型与调试3. 船舶自动控制系统的实际应用案例分析【教学方法】1. 授课讲解法:以理论为主,结合实际案例;2. 讨论交流法:引导学生积极参与讨论,共同探讨问题;3. 实践操作法:通过实际操作使学生熟悉各种传感器和执行器的基本工作原理【教学准备】1. 课程计划和教学大纲2. 相关教材和参考书籍3. 班级计算机实验室等实践设备4. 相关演示资料和工具箱【教学评估】1. 课后作业:针对本节课的相关题目;2. 实验操作:针对相关传感器和执行器的操作;3. 期末考试:包含理论和实践两部分。
【教学评分标准】1. 课堂表现(30分):包括听课态度、提问与回答、互动交流等;2. 实验操作(30分):包括实验操作技能、实验数据记录及分析等;3. 期末考试(40分):包括理论和实践两部分综合考核。
以上是大学船舶自动化基础教案的内容,该教案的主要目标是让学生学习和掌握船舶自动化的基本概念、原理和应用,以及传感器、执行器和PID控制器等基础知识,让学生能够设计和实现船舶自动控制系统。
110309航海自动化基础第一篇
本文由百慕大的海贼贡献ppt文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
航海自动化基础教学课件一.课程主要内容航海自动化是航海类专业基础课之一。
本课程主要介绍了现航海自动化是航海类专业基础课之一。
代船舶自动化技术的发展概况,自动控制技术的基本理论,代船舶自动化技术的发展概况,自动控制技术的基本理论,航海自动化中主要控制技术的基本思想,航海自动化中主要控制技术的基本思想,以及航海自动化系统和其分系统的基本工作原理等。
统和其分系统的基本工作原理等。
二.教学基本要求要求学生能了解现代船舶航海自动化技术的发展概况能熟悉自控基本理论在航海技术问题上的应用思路掌握航海自动化系统及其分系统的基本工作原理、功能和掌握航海自动化系统及其分系统的基本工作原理、特点二.课程考核方式采用课程结业考试和平时考核采用课程结业考试和平时考核两种方式组合计算本课程最课程结业考试和平时考核两种方式组合计算本课程最终考核成绩。
终考核成绩。
其中课程结业考试成绩占总成绩的80%其中课程结业考试成绩占总成绩的80%课程结业考试成绩占总成绩的平时考核成绩成绩占总成绩的20%平时考核成绩成绩占总成绩的20%考核成绩成绩占总成绩的平时考核成绩由考勤和平时提问组成缺勤一次,平时成绩扣二十分缺勤一次,第一章航海自动化概况第一节船舶自动化发展概况第二节船舶自动化基础概述第一节航海自动化概况一、船舶自动化的概念自动控制:在无人直接参加的情况下,自动控制:在无人直接参加的情况下,利用控制装置使被控对象和过程自动地按预定规律变化的控制过程。
二战以后,二战以后,船舶自动化技术获得很快的发展船舶自动化船舶操纵与机舱设备运转过程自动化船舶自动化的重要内容轮机自动化船舶自动化航海自动化船体自动化轮机自动化1)主辅机遥控。
在驾驶台操纵主机和舵机,在机舱集1)主辅机遥控在驾驶台操纵主机和舵机,主辅机遥控。
中控制室控制主机、中控制室控制主机、发电机和其它辅助机械设备2)数据自动记录。
航海自动化基础[4]
![航海自动化基础[4]](https://img.taocdn.com/s3/m/23348974366baf1ffc4ffe4733687e21ae45ff14.png)
航海自动化基础[4]引言航海自动化是现代航海领域的重要发展方向之一。
随着科技的不断进步,航海自动化系统在提高船舶的安全性、效率和可持续性方面发挥着重要作用。
本文将介绍航海自动化的基础知识,并重点关注航海自动化的第4部分。
航海自动化的基本概念航海自动化是指利用各种先进的技术手段来实现船舶航行和操作的自动化过程。
航海自动化系统包括船舶导航系统、动力系统、通信系统、控制系统等多个子系统,通过相互协调和配合来实现船舶的自主航行和自动操作。
航海自动化系统的基本原理是将各个子系统以及与之相关的传感器、控制装置等集成在一起,通过计算机技术和自动控制技术实现对船舶的全面控制和监控。
这样一来,船舶的操作不再依赖于人工的直接干预,而是由计算机自动完成,提高了船舶的安全性和效率。
船舶导航系统船舶导航系统是航海自动化系统中最核心的部分之一。
它利用全球卫星定位系统(GPS)和其他相关技术,实现对船舶位置、航向、速度等信息的实时监测和计算。
船舶导航系统还可以根据设定的航线和目标,自动调整船舶的航向和速度,以实现船舶自主航行。
船舶导航系统的核心是导航计算机,它接收来自GPS和其他传感器的数据,并进行相关的计算和处理。
导航计算机可以根据输入的数据和预设的航行参数,实时计算船舶的位置、航向和速度等信息,并在船舶的控制台上显示。
船舶的船长和船员可以通过导航计算机来监测和控制船舶的航行状态。
船舶动力系统船舶动力系统是指驱动船舶前进的动力装置,通常是内燃机或电动机。
在航海自动化系统中,船舶动力系统与导航系统紧密结合,通过自动控制来实现对船舶的动力输出的调节和控制。
船舶动力系统的自动控制主要包括两个方面:一是根据船舶导航系统提供的航行数据和航行参数来控制动力系统的输出;二是根据船舶的动力需求和性能要求,自动选择最优的动力输出方式和参数。
船舶动力系统的自动控制通常需要通过电子控制单元(ECU)或船舶自动化控制系统来实现。
ECU是负责控制和调节船舶动力系统的关键设备,它可以根据输入的信号,控制和调节动力系统的油门、换挡、转速等参数,以实现对船舶动力输出的精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ppt文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。
航海自动化基础
教学课件
一.课程主要内容 航海自动化是航海类专业基础课之一。本课程主要介绍了现 航海自动化是航海类专业基础课之一。 代船舶自动化技术的发展概况,自动控制技术的基本理论, 代船舶自动化技术的发展概况,自动控制技术的基本理论, 航海自动化中主要控制技术的基本思想, 航海自动化中主要控制技术的基本思想,以及航海自动化系 统和其分系统的基本工作原理等。 统和其分系统的基本工作原理等。 二.教学基本要求 要求学生能了解现代船舶航海自动化技术的发展概况 能熟悉自控基本理论在航海技术问题上的应用思路 掌握航海自动化系统及其分系统的基本工作原理、功能和 掌握航海自动化系统及其分系统的基本工作原理、 特点
二.课程考核方式 采用课程结业考试和平时考核 采用课程结业考试和平时考核两种方式组合计算本课程最 课程结业考试和平时考核两种方式组合计算本课程最 终考核成绩。 终考核成绩。 其中课程结业考试成绩占总成绩的80% 其中课程结业考试成绩占总成绩的80% 课程结业考试成绩占总成绩的 平时考核成绩成绩占总成绩的20% 平时考核成绩成绩占总成绩的20% 考核成绩成绩占总成绩的 平时考核成绩由考勤和平时提问组成 缺勤一次,平时成绩扣二十分 缺勤一次,
用水开 关
电动机
SM
Q2
if
以上系统的基本组成部分
被控对象-水池 被控对象- ? 测量元件—浮子和杠杆(物理量转换)。 测量元件—浮子和杠杆(物理量转换) ? 比较元件—电位器 (求浮子的希望位置与实位置之差) 。 比较元件— 求浮子的希望位置与实位置之差) ? 放大元件—放大器(当测量元件测得的信号与给定信号比较后 放大元件—放大器( 得到的误差信号不足以使执行元件动作时, 得到的误差信号不足以使执行元件动作时,一般还需要放大元 件进行电压和功率放大,来推动执行元件去控制被控对象) 件进行电压和功率放大,来推动执行元件去控制被控对象)。 ? 执行元件—电机和阀(直接驱动被控对象,以改变被控制量)。 执行元件—电机和阀(直接驱动被控对象,以改变被控制量)。
水池液面控制系统
人在参与控制中起了以下三方面的作用: 人在参与控制中起了以下三方面的作用: 1) 测量实际液面高度h1——用眼睛。 测量实际液面高度h ——用眼睛 用眼睛。 2) 将测得实际液面h1与希望液面的高度h0相比 将测得实际液面h 与希望液面的高度h ——用脑 用脑。 较——用脑。 3) 根据比较的结果,即按照偏差的正负去决定 根据比较的结果, 的动作——用手 用手。 的动作——用手。
星光丸
最早的超自动化油轮
4)1979年诞生了高度合理化的超自动化船,即 1979年诞生了高度合理化的超自动化船, 年诞生了高度合理化的超自动化船 第四代自动化船。 第四代自动化船。这些高度合理化的自动化船均 采用分散的单项计算机控制系统, 采用分散的单项计算机控制系统,以微处理机为 中心,各种控制程序更加完善。 中心,各种控制程序更加完善。
3.60年代末,开始研究全面实现船舶计算机控制的超 3.60年代末,开始研究全面实现船舶计算机控制的超 年代末 自动化船舶。这种船舶超出了机舱自动化控制的范围, 自动化船舶。这种船舶超出了机舱自动化控制的范围, 在导航、机舱、货物装卸、 在导航、机舱、货物装卸、报务设置医疗等方面实现 全面的自动化。 全面的自动化。 1970年 日本“星光丸” 1970年 日本“星光丸”的竣工开创驾机合一的新时 代
自动控制和人工控制比较 自动控制 人工控制 都以测量偏差,修正偏差为目的。 都以测量偏差,修正偏差为目的。 并且为了测量偏差, 并且为了测量偏差,必须把系统的 实际输出反馈到输入端
区别: 区别:自动控制用控制器代替人完成控制
自动控制系统:是由控制装置和被控对象所组成, 自动控制系统:是由控制装置和被控对象所组成,它 们以某种相互依赖的的方式组合成为一个有机整体, 们以某种相互依赖的的方式组合成为一个有机整体, 并对被控对象进行自动控制。 并对被控对象进行自动控制。 自动控制系统的结构
berlin express
5)随着计算机技术的发展,现在船舶上所安装 随着计算机技术的发展, 的专家系统可赋予船舶智能化的逻辑思维和决策 功能,从而实现船舶的航行操纵和营运自动化的 功能,从而实现船舶的航行操纵和营运自动化的 智能管理。 智能管理。这种具有高度信息收集功能和综合判 断推理决策决策功能的船舶标志着船舶自动化已 进入第五个阶段。 进入第五个阶段。
第二节 航海自动化基础概述
一、自动化理论产生及发展概况 起源: 起源:第一次工业革命 18世纪,James Watt 为控制蒸汽机速度设计的离心 18世纪 世纪, 调节器,是自动控制领域的第一项重大成果。 调节器,是自动控制领域的第一项重大成果。 ………………………… 发展 :20世纪60年代,数字计算机技术的迅速发展为 20世纪 年代 世纪60年代, 复杂系统的基于时域分析的现代控制理论提供了可能。 复杂系统的基于时域分析的现代控制理论提供了可能。 从1960年至今,确定性系统、随机系统的最佳控制, 1960年至今 确定性系统、随机系统的最佳控制, 年至今, 及复杂系统的自适应和智能控制技术, 及复杂系统的自适应和智能控制技术,都得到充分的 研究。 研究。
大连海事大学
育鲲轮机舱集控室
航海自动化 1)电子海图的显示与信息系统 2)雷达、卫星导航和定位系统 雷达、 3)船舶自动识别系统(AIS) 船舶自动识别系统(AIS)
4)自动操舵系统
5)最佳航线编制系统 6)船载航行数据记录仪(VDR) 船载航行数据记录仪(VDR) 7)自动避碰系统 8)现代船舶管理系统 9)船舶治安报警系统(SSAS) 船舶治安报警系统(SSAS)
住友重工业株式会社和两家日本电子公司联合研制 成世界上第一台主机声控系统,安装在179000吨的散装 成世界上第一台主机声控系统,安装在179000吨的散装 货船“纪川丸” 货船“纪川丸” 该系统能将船长和值班驾驶员发出的口令变成主机的 控制信号,故可省去传令钟和主机的操作人员。 控制信号,故可省去传令钟和主机的操作人员。因为可 通过无线电话筒将位于驾驶台或桥楼两翼任何部位的口 令直接变成一个操作信号, 令直接变成一个操作信号,所以大大地提高了船舶操纵 的安全性。 的安全性。
金华山丸
日本 商船三井 最早的自动化船
春日山丸
金华山丸的姊妹船
2.时间:60年代中期 2.时间 60年代中期 时间:
第二代自动化船舶
代表船舶:1964年由荷兰委托日本建造的 型油轮 年由荷兰委托日本建造的65 代表船舶:1964年由荷兰委托日本建造的65型油轮 特点:以无人机舱为核心。 特点:以无人机舱为核心。 为核心 无人机舱: 无人机舱:是利用自动化设备代替轮机人员在机舱值 班期间的操作管理工作, 班期间的操作管理工作,从而实现在一段时间机舱无 需人员值班。 需人员值班。
第二章 自动控制系统
第一节 自动控制系统的基本概念与组成 第二节 自动控制系统的数学模型 第三节 自动控制系统的分类 第四节 自动控制系统的传递函数和方块图 第五节 自动控制系统的基本分析方法
第一节 自动控制系统的基本概念与组成
一、自动控制系统基本概念 自动控制:(Automatic control)是指在没有人直 control) 自动控制: 接参与的条件下,利用控制器(外加的设备或装置) 接参与的条件下,利用控制器(外加的设备或装置)使 被控制对象(如机器、设备和生产过程) 被控制对象(如机器、设备和生产过程)的某个参数 或工作状态,即被控量) (或工作状态,即被控量)能自动按照预定的规律变 或运行)。 化(或运行)。 举例: 举例: 锅炉的炉温控制 卫星的太阳能电池板的角度调节 船舶自动驾驶仪
综合船桥 系统 IBS) (IBS)
船体自动化 1)船体受力状态监控 2)最佳配载计算 3)货油自动装卸 4)系泊自动化 5)压载水的自动排装 6)冷藏舱和冷藏集装箱的温度自动调节和监视报警 7)船内通信自动化、生活设施自动化以及医疗自动化 船内通信自动化、
二.船舶自动化发展的概况 船舶自动自动化研究始于60年代初期 年代初期, 80年代共 船舶自动自动化研究始于60年代初期,至80年代共 经历了四个发展阶段,目前正处于第五个发展阶段。 经历了四个发展阶段,目前正处于第五个发展阶段。 1.时间:60年代初 第一代自动化船舶 1.时间:60年代初 时间 代表船舶:1961年 代表船舶:1961年 日本的金华山丸 特点:1)以机舱集中监控为主。在机舱内设置集 特点: 机舱集中监控为主。 为主 中监视屏和控制台, 中监视屏和控制台,只需要一个人员在这 里对动力装置进行监视和控制 主机遥控。 2)在驾驶室可进行主机遥控。 在驾驶室可进行主机遥控
智能控制 在无人干预的情况下能自主地驱动智能机器实现控 制目标的自动控制技术。 制目标的自动控制技术。 对许多复杂的系统,难以建立有效的数学模型和用 对许多复杂的系统, 常规的控制理论去进行定量计算和分析, 常规的控制理论去进行定量计算和分析,而必须采用 定量方法与定性方法相结合的控制方式。 定量方法与定性方法相结合的控制方式。 定量方法与定性方法相结合的目的是要由机器用类 似于人的智慧和经验来引导求解过程。 似于人的智慧和经验来引导求解过程。
船舶自动化的重要内容
轮机自动化
船舶自动化
航Hale Waihona Puke 自动化 船体自动化 轮机自动化 1)主辅机遥控。在驾驶台操纵主机和舵机,在机舱集 1)主辅机遥控 在驾驶台操纵主机和舵机, 主辅机遥控。 中控制室控制主机、 中控制室控制主机、发电机和其它辅助机械设备 2)数据自动记录。定时记录轮机日志,自动记录车钟、 2)数据自动记录 定时记录轮机日志,自动记录车钟、 数据自动记录。 舵令及主辅机工况参数。 舵令及主辅机工况参数。 3)运行情况的集中监视和自动调节 处理。 3)运行情况的集中监视和自动调节、处理。主辅机工 运行情况的集中监视和自动调节、 况的集中显示; 况的集中显示;参数的越限报警及自动调节以保持参 数恒定;故障后的自动切换、 数恒定;故障后的自动切换、处理 4)自动分析机器故障的原因和提出维修预报 4)自动分析机器故障的原因和提出维修预报 5)船舶电站自动化 5)船舶电站自动化